F r M
Werbung

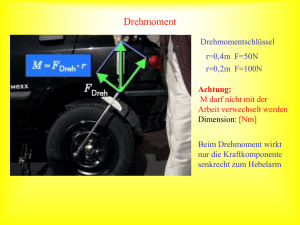
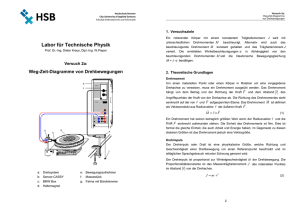
9. Dynamik der Drehbewegung © Peter Riegler, FH Wolfenbüttel Motivation: Kinematik von Translation und Rotation sind völlig analog: Translation ” Position r Rotation Winkel ” ϕ ” ”= r Winkelgesch. ê Drehvektor ” ω=” ϕ Geschwindigkeit v – – ” ” ” ” ω=” ϕ Beschleunigung a = v = r Winkelsbeschl. ê Drehbeschl. α = ” ÷” Dynamik der Translationsbewegung wird durch (resultierende) Kraft F und Trägheit m bestimmt. Was sind die analogen Größen der Rotationsbewegung? 9.1 Drehmoment Erfahrung: Um mit gegebener Kraft einen Körper möglichst effektiv in Drehung zu versetzen, muss man æmöglichst weit außen angreifen æ und möglichst tangential zu beabsichtigten Drehung. F r M Φ Eine Kraft F, die im Abstand r von einer Drehachse auf einen Körper angreift, verursacht ein Drehmoment ("Drehkraft") ÷÷÷” ÷” M = ”r ä F . drehdyn-2.nb 2 Sein Betrag ist M = r F sinF, seine Richtung ergibt sich auch der Drei-Finger-Regel der rechten Hand. F ist der ÷” Winkel zwischen ”r und F (in dieser Reihenfolge!) ÷” ÷” Beachte ”r ä F = - F ä ”r Die SI-Einheit des Drehmoments ist [M]=1Nm (kein eigener Name). Beispiel: Drehmomente an einem Balken l1 F1 α l2 F2 resultierendes Moment? Mres = F2 l2 − Cos@αD F1 l1 Analog zum 1. Newtonschen Gesetz gilt: Ein drehbar gelagerter Körper befindet sich im Gleichgewicht (d.h. ruht oder bewegt sich mit konstanter Winkelgeschwindigkeit), wenn das resultierende angreifende Moment 0 ist. drehdyn-2.nb 3 Beispiel: Drehbewegung eines Massenpunktes y ω r F m ϕ x Drehmoment M = r F; Beschleunigung des Massenpunktes F = m a; Zusammenhang Beschleunigung - Winkelbeschleunigung a =rα; flZusammenhang Drehmoment - Winkelbeschleunigung: M m r2 α Erkenntnis: Drehmoment ∂ Winkelbeschleunigung (vgl. Translationsbewegung: Kraft ∂ Beschleunigung) Proportionalitätskoeffizient (m r2 ) heißt Trägheitsmoment des Massenpunktes. drehdyn-2.nb 4 9.2 Dynamische Grundgleichung Drehender Körper besteht aus infinitesimalen Massenpunkten dm=rdV (Dichte r=dm/dV). Jeder Massenpunkt erfährt gleiche Winkelbeschleunigung a. Drehmoment, das auf einen Massenpunkt im Abstand r von der Drehachse wirkt: dM = dm r2 α; y dm=ρ dV dϕ r x R z Gesamtmoment ist Summe aller Teilmomente dM: M = J‡ r2 dmN α Die Integration erstreckt sich über die Gesamtmasse. J = Ÿ r2 dm heißt Trägheitsmoment des Körpers um seine Drehachse. Offensichtlich hängt der Wert von J von der Lage der Drehachse ab. drehdyn-2.nb 5 Dynamisches Grundgesetz bei Drehbewegungen ÷÷÷” ÷÷÷” Für die Summe aller an einem Körper angreifenden Drehmomente M = ⁄ M i gilt ° ÷÷÷” M = J ÷w” ° Dabei ist ÷a” = ÷w” der Vektor der Winkelbeschleunigung und J das Massenträgheitsmoment des Körpers. Momente sind also die Ursache von Winkelgeschwindigkeitsänderungen. Wegen der Analogie zwischen Translation und Rotation Ha õa, F õ M ) ist das Massenträgheitsmoment die zur Masse analoge Größe Hmõ J ). Wie die Masse eines Körpers seine Trägheit gegenüber Beschleunigung misst, qunantifiziert das Massenträgheitsmoment die Trägheit eines Körpers gegenüber Drehbeschleunigung. 9.3 Trägheitmomente Das Trägheitsmoment eines Körpers mit Masse m ,Volumen V und Dichte r = d m ê d V ist J = Ÿ r2 d m = Ÿ r r2 d V dabei ist r der Abstand von der Drehachse des Körpers. Das Trägheitsmoment eines Körpers misst seine Trägheit gegen Drehbewegung. Beispiel: Massenträgheitsmoment eines Würfels z z y y x x a) b) a) Drehung um Achse durch Körperschwerpunkt um z-Achse mit Kantenlänge a drehdyn-2.nb 6 Clear@aD Ja = ρ ‡ aê2 aê2 ‡ −aê2 −aê2 aê2 ‡ −aê2 Hx2 + y2 + z2 L x y z a5 ρ 4 m = ρ a3 a3 ρ Ja m a2 4 a2 Ja = m 4 b) Drehung um Achse durch Würfelkante Jb = ρ ‡ a 0 a5 ρ Jb m a2 Jb = a2 m a ‡ 0 a ‡ 0 Hx2 + y2 + z2 L x y z drehdyn-2.nb 7 9.4 Schwerpunkt Wie muss man einen Körper der Masse M unterstützen, der der Schwerkraft unterliegt, damit er sich nicht bewegt? ÷” öAuf jede inifinitesimale Teilmasse dm wirkt Kraft dF =dm ÷g” æ Keine Translation: Resultierende Kraft muss 0 sein. ÷” Auf den Körper wirkt die Gewichtskraft F G = Ÿ dm ” g=M” g ÷” flHaltekraft = -F G æ Keine Rotation: Resultierende Drehmoment muss 0 sein. ÷÷÷” 1 ” ” Auf den Körper wirkt das Drehmoment M = Ÿr d F = (Ÿ ”r dm)äg dm ⋅ g r S rS − FG Haltekraft greife im Punkt S an ÷÷÷” ” + ”r äH-m ÷g”L fl Resultierendes Moment M ges = (Ÿ ”r dm)äg s fl Resultierendes Moment ist dann und nur dann gleich 0, wenn Ÿ ”r dm-r”s H-mL=0 ” Ÿ r dm ” rs = m Dieser Punkt heißt Schwerpunkt oder Massenmittelpunkt des Körpers Der Schwerpunkt eines Körpers ”rs hat die Position ” ” Ÿ r dm Ÿ r ρdV ” rs = = . m m drehdyn-2.nb 8 Der Schwerpunkt eines Systemes von N Massenpunkten mi an den Positionen ”ri liegt bei ” m ⁄r ” i i . rs = ⁄m i Beispiel: Schwerpunkt eines Würfels mit inhomogener Massenverteilung Beispiel: Schwerpunkt eines Systems von Massenpunkten Zwei Massenpunkte in der Ebene ÷÷÷÷÷” = 80, 0<; m1 = 1; r 1 ÷÷÷÷÷” = 83, 6<; m2 = 2000; r 2 m1 ÷÷÷÷ r÷1” + m2 ÷÷÷÷ r÷2” ÷÷r÷” = êê N s m1 + m2 82.997, 5.99401< 9.5 Analogie von Translations- und Rotationsbewegung Translation ” Position r Rotation Winkel ” ϕ ” ” Geschwindigkeit v = r Drehvektor ” ω=” ϕ ” – – ” ” ” ” Beschleunigung a = v = r Drehbeschleunigung α = ” ω=ϕ ” ” Kraft F Drehmoment M Masse m Trägheitsmoment J ” ” Dyn. Grundgesetz F = m ” a Dyn. Grundgesetz M = J ” α drehdyn-2.nb Lernziele æ Grundlegende Gesetze der Drehbewegung kennen und erklären können. æ Massenträgheitsmoment und Schwerpunkt definieren und für einfache Körper berechnen können. æ Bewegungsgleichung der Drehbewegungen von Körpern aufstellen können und für einfache Fälle selbst lösen können. Literatur obligatorisch Tipler: 8.1, 8.2, 8.7 oder Feynman: 18-1, 18-2, 19-1, 19-2, 19-3 weiterführend Tipler: 8, 9; Feyman: 18, 19, 20 9