Lösung der Poissongleichung: einfache Randbe
Werbung

Auszug aus Kap. 3:
Lösung der Poissongleichung: einfache Randbedingungen
3.2 Probleme mit Azimutalsymmetrie
Die Diskussion ist etwas aufwendiger, falls die Ladungsverteilung eine Funktion von zwei Variablen, z.B. des Abstandes und des Polarwinkels θ
ρ(r) = ρ(r, θ)
ist. Als Beispiel für eine derartige Ladungsverteilung, die um den Koordinatenursprung konzentriert ist, kann man ein homogen geladenes Rotationsellipsoid betrachten, dessen Oberfläche durch
y2
z2
x2
+
+
=1
a2
a2
c2
beschrieben wird (Abb. 3.1a). Schnitte mit den Ebenen z =const. sind Kreise,
Schnitte mit den Ebenen x =const. und y =const. sind Ellipsen. Geht man
zu Kugelkoordinaten über, so lautet die Flächengleichung
2
sin θ cos2 θ
+
=1.
R2
a2
c2
Auflösung nach R(θ) ergibt eine Beschreibung der Oberfläche in der Form
(c > a wird ohne Beschränkung der Allgemeinheit vorausgesetzt)
−1/2
(c2 − a2 )
2
R(θ) = c 1 +
sin
θ
.
a2
Das homogen geladene Ellipsoid wird somit durch die Ladungsverteilung
ρ0
r ≤ R(θ)
ρ(r) =
0
r > R(θ)
beschrieben. Die θ -Abhängigkeit ergibt sich in diesem Fall durch die Begrenzung. Ein Rotationsellipsoid mit einer beliebigen Ladungsverteilung würde
durch die Angaben
ρ(r, θ)
r ≤ R(θ)
ρ(r) =
0
r ≥ R(θ)
charakterisiert, so dass im Innengebiet die Poissongleichung
∆Vi (r) = −4πke ρ(r, θ)
r ≤ R(θ)
und im Außengebiet die Laplacegleichung
(3.1)
70
3 Lösung der Poissongleichung: einfache Randbedingungen
∆Va (r) = 0
r > R(θ)
(3.2)
zuständig ist.
Es ist vorteilhaft, mit der Diskussion der Lösung der Laplacegleichung in
dem Außenraum zu beginnen. Infolge der vorgegebenen Symmetrie kann man
voraussetzen, dass das Potential nicht von dem Azimutalwinkel ϕ abhängt
∂V
=0.
∂ϕ
Für die weitere Diskussion hat man dann die Wahl, das Problem in Kugelkoordinaten (r, ϕ, θ) oder in Zylinderkoordinaten (ρ, ϕ, z) zu behandeln
(Abb. 3.1b). Orientiert man sich noch einmal an dem homogenen Rotations(a)
(b)
z
ρ
z
y
θ
r
x
Rotationsellipsoid
Koordinatenwahl
Abb. 3.1. Zur Azimutalsymmetrie
ellipsoid, so würde man erwarten, dass Kugelkoordinaten nützlicher sind, falls
das Ellipsoid nicht zu länglich ist. Für c a oder gar c → ∞ (ein unendlich
langer Zylinder) sind wohl Zylinderkoordinaten vorzuziehen. In beiden Fällen
steht eine etwas langwierige Diskussion an.
Wählt man Kugelkoordinaten, so lautet die Laplacegleichung
∂
∂Va (r, θ)
1 ∂
1
∂Va (r, θ)
r2
+ 2
sin θ
=0,
∆Va (r, θ) = 2
r ∂r
∂r
r sin θ ∂θ
∂θ
(3.3)
bzw. nach Multiplikation mit r2
∂
1 ∂
∂Va (r)
2 ∂Va (r)
r
+
sin θ
=0.
∂r
∂r
sin θ ∂θ
∂θ
Eine abgekürzte Schreibweise ist
∆r Va (r, θ) + ∆θ Va (r, θ) = 0 ,
wobei die Operatoren
3.2 Probleme mit Azimutalsymmetrie
∂
∂2
∂
∂
∆r =
r2
= r2 2 + 2r
∂r
∂r
∂r
∂r
∆θ =
1 ∂
sin θ ∂θ
71
(3.4)
∂
∂
∂2
sin θ
= 2 + cot θ
∂θ
∂θ
∂θ
(3.5)
eingeführt werden. Es stellt sich die Frage: Wie gewinnt man eine allgemeine
Lösung der partiellen Differentialgleichung (3.3) bzw. welche spezielle Lösung
ist gefragt?
Die benötigten Grundlagen zu dem Thema partielle Differentialgleichungen
werden in Math.Kap. 3 ausführlicher vorgestellt.
In Zusammenfassung der Ausführungen in Math.Kap. 3.1 kann man an
dieser Stelle das Folgende notieren. Der erste Schritt zur Beantwortung der
Frage beruht auf dem Separationsverfahren. Zur Lösung der zweidimensionalen Laplacegleichung in Kugelkoordinaten
(∆r + ∆θ ) Va (r, θ) = 0
macht man den Ansatz (Beachte: R bezeichnet hier eine Funktion der Radialkoordinate)
Va (r, θ) = R(r)P (θ) .
Die partielle Differentialgleichung geht dann nach einfachem Sortieren in
∆r R(r) ∆θ P (θ)
+
=0
R(r)
P (θ)
über. Da die einzelnen Summanden jeweils nur Funktionen einer Variablen
sind, müssen sie Konstanten (Separationskonstanten) entsprechen, die
sich zu Null addieren. Mit diesem Argument wird die partielle Differentialgleichung in zwei gewöhnliche Differentialgleichungen zerlegt
d
dR(r)
r2
= κR(r)
(Radialgleichung)
(3.6)
dr
dr
1 d
sin θ dθ
...
sin θ
dP (θ)
dθ
= −κP (θ)
(Winkelgleichung) .
(3.7)
6.2 Die Maxwellschen Gleichungen
223
Auszug aus Kap. 6:
Elektrodynamik: Grundlagen
6.2 Die Maxwellschen Gleichungen
Es ist nützlich, mit einer Zusammenstellung der Feldgleichungen für den stationären Fall zu beginnen. Anschließend ist die Frage zu beantworten, welche Modifikationen im Fall von zeitlich veränderlichen Situationen notwendig
sind. Für die stationäre elektromagnetische Welt wurden die folgenden Gleichungen diskutiert:
(1) Das Coulombgesetz in Gaußform
div D(r) = 4πkd ρw (r)
∇ · D(r) = 4πkd ρw (r) .
Die dielektrische Verschiebung D wird durch die Verteilung der
wahren Ladungen bestimmt.
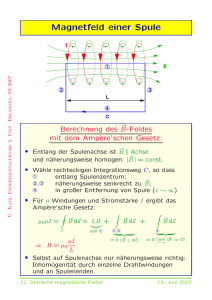
(2) Das Ampèresche Gesetz
rot H(r) = 4πkh j w (r)
∇ × H(r) = 4πkh j w (r) .
Die magnetische Feldstärke H wird durch die wahren (stationären)
Ströme bestimmt.
(3)
rot E(r) = 0
∇ × E(r) = 0 .
Das stationäre elektrische Feld E ist wirbelfrei. Es kann durch ein
Skalarpotential dargestellt werden.
div B(r) = 0
(4)
∇ · B(r) = 0 .
Die magnetische Induktion B ist quellenfrei. Es gibt keine
magnetischen Ladungen.
Neben den Feldgleichungen ist noch ein Satz von Gleichungen, der die
realen, makroskopischen Felder E und B mit den Hilfsfeldern D und H
verknüpft, zu betrachten
D(r) =
kd
E(r) + 4πkd P (r)
ke
B(r) =
km
km
H(r) + 4π
M (r) .
kh
kf
Diese Aussagen sind brauchbar, wenn man mit einem (simplen oder realistischeren) Modell die Polarisation oder die Magnetisierung (d.h. die Respons
des Materials) berechnet hat. In der Praxis ersetzt man diese mikroskopischen Relationen meist durch die empirischen Materialgleichungen (einfache
Form)
224
6 Elektrodynamik: Grundlagen
D(r) = ε
kd
E(r)
ke
B(r) = µ
km
H(r) .
kh
Hinzu kommt die Aussage, z.B. in der differentiellen Form des Ohmschen
Gesetzes, dass ein elektrisches Feld einen Stromfluss (z.B. in Leitern oder in
einem Plasma) bedingen kann
j w (r) = σE(r) .
Im stationären Fall sind elektrische und magnetische Effekte nur über den
Stromfluss gekoppelt
∇ × H(r) = 4πkh σE(r) .
(6.8)
Diese Gleichung ergibt sich, wenn man das Ohmsche Gesetz in das Ampèrsche
Gesetz einsetzt. Im dynamischen Fall liegt eine zusätzliche Kopplung von
magnetischen und elektrischen Feldern vor: Ein zeitabhängiges Magnetfeld
erzeugt ein elektrisches Feld. Diese Aussage wird durch das Induktionsgesetz
ausgedrückt
∂
B(r, t) .
∂t
Das Induktionsgesetz ist eine Erweiterung der Aussage über die Wirbelfreiheit des elektrischen Feldes, der Aussage (3) über stationäre Felder.
Die Frage lautet somit: Wie sind die Aussagen (1),(2) und (4) zu modifizieren, wenn zeitabhängige Phänomene vorliegen?
∇ × E(r, t) = −kf
(1’) Die einfachste Modifikation des Coulombgesetzes wäre
∇ · D(r, t) = 4πkd ρw (r, t) .
(6.9)
Anstelle der stationären Ladungsverteilung liegt eine zeitlich veränderliche
Ladungsverteilung vor. Als Beispiel könnte man an eine homogen geladene
Kugel denken, die bewegt wird. Man erhält dann, entsprechend der obigen
Gleichung, ein zeitlich veränderliches D -Feld. Auf der anderen Seite stellt
eine bewegte Ladung im Allgemeinen einen Strom i(t) dar. Dieser verursacht
ein Magnetfeld. Für die Beschreibung der Erzeugung von Magnetfeldern ist
jedoch das Ampèresche Gesetz zuständig. Wenn man also zunächst einmal
hofft, dass die einfachste Modifikation des Coulombgesetzes ausreicht, fällt
die Hauptlast der Diskussion auf das
(2’) Ampèresche Gesetz. Die einfachste Modifikation wäre
∇ × H(r, t) = 4πkh j w (r, t) .
Diese Modifikation ist jedoch, wie das folgende einfache Argument zeigt, nicht
ausreichend. Bildet man die Divergenz dieser Gleichung
∇ · (∇ × H(r, t)) = 4πkh ∇ · j w (r, t) ,
so findet man: Die linke Seite verschwindet, denn für jedes differenzierbare
Vektorfeld ist
6.2 Die Maxwellschen Gleichungen
225
∇ · (∇ × H(r, t)) = 0 .
Die rechte Seite ist wegen der Kontinuitätsgleichung ungleich Null
∂ρw (r, t)
= 0 .
∂t
Das Ampèresche Gesetz (2) ist nur im stationären Fall (∂ρw /∂t = 0) eine
konsistente Aussage. Die einfachste dynamische Erweiterung ist nicht mit
der Forderung nach Ladungserhaltung verträglich.
Ein Ausweg aus dem Dilemma wurde 1865 von J.C. Maxwell vorgeschlagen. Maxwells Argument kann man in der folgenden Weise zusammenfassen:
Die Kontinuitätsgleichung kann man mit dem (einfach erweiterten) Coulombgesetz (6.9) in der folgenden Form kombinieren
∇ · j w (r, t) = −
∂ρw (r, t)
1 ∂
= ∇ · j w (r, t) +
(∇ · D(r, t))
∂t
4πkd ∂t
1 ∂
= ∇ · j w (r, t) +
D(r, t) = 0 .
4πkd ∂t
0 = ∇ · j w (r, t) +
Ersetzt man nun in dem Ampèreschen Gesetz die Stromdichte durch den
Ausdruck in der Klammer, so gewinnt man eine konsistente Gleichung
1 ∂
D(r, t) .
(6.10)
∇ × H(r, t) = 4πkh j w (r, t) +
4πkd ∂t
Bei Divergenzbildung ergeben die linke wie die rechte Seite Null. Im stationären Fall (D(r, t) → D(r)) geht diese Gleichung in das alte Ampèresche
Gesetz über. Der zusätzliche Term beinhaltet die Aussage: Nicht nur die
Stromdichte, sondern auch ein elektrisches Feld, das im freien Raum mit der
Zeit variiert, kann ein magnetisches Wirbelfeld erzeugen. Definiert man die
Verschiebungsstromdichte j v
j v (r, t) =
1 ∂
D(r, t) ,
4πkd ∂t
(6.11)
so gilt
∇ × H(r, t) = 4πkh (j w (r, t) + j v (r, t)) .
(6.12)
Es ist nützlich (da es ein Kernpunkt der Argumentation darstellt), den Übergang von der stationären zu der dynamischen Ampèreschen Gleichung noch
einmal auf eine anschaulichere (aber äquivalente) Weise zu vollziehen. Man
betrachtet dazu einen Stromkreis aus einer Wechselstromquelle und einer Kapazität C (Abb. 6.2a). In dem Draht fließt ein Wechselstrom, den man durch
eine Stromdichte j w (r, t) darstellen kann. Die Kondensatorplatten werden
periodisch umgeladen. In dem Zwischenraum existiert ein zeitlich veränderliches D -Feld. Man betrachtet nun die Integralform des einfach erweiterten
Ampèreschen Gesetzes
226
6 Elektrodynamik: Grundlagen
H(r, t) · dr = 4πkh
K
j w (r, t) · df ,
F(K)
wobei die Kurve K die Zuleitung zu den Platten umschließen soll (Abb. 6.2b).
Die Wahl der Fläche F (K) ist nach dem Stokeschen Theorem beliebig, so(a)
(b)
F1
D(r)
K
C
F2
jw
Stromkreis
Argumentation
Abb. 6.2. Maxwells Verschiebungsstrom
lange sie K als Randkurve hat. Wählt man die Fläche F1 , durch die die
Zuleitung stößt, so ist alles in Ordnung
j w (r, t) · df = 0 .
F1
Wenn man jedoch die mathematisch gleichwertige Fläche F2 benutzt, die
zwischen den Kondensatorplatten verläuft, so ist
j w (r, t) · df = 0 .
F2
Der von Maxwell vorgeschlagene Verschiebungsstrom bringt die Angelegenheit in Ordnung. Man kann, im Sinn dieser praktischen Variante, den Maxwellschen Verschiebungsstrom als eine Abstraktion von dem tatsächlichen
Stromfluss auf den Verschiebungsstrom, der durch das elektrische Feld zwischen Platten erzeugt wird, auffassen.
Die Konsequenzen dieser Modifikationen sind weitreichend. Ein Wechselstrom in einem Leiter, der durch ein elektrisches Wechselfeld erzeugt wird,
ergibt nach dem (erweiterten) Ampèreschen Gesetz ein zeitlich veränderliches
Magnetfeld. Dieses erzeugt nach dem Faradaygesetz ein zeitlich veränderliches elektrisches Wirbelfeld. Dieses erzeugt nach dem erweiterten Ampèreschen
Gesetz ein weiteres B -Feld etc. Diese Kette von zeitlich veränderlichen E und
B -Feldern, die sich in Raum und Zeit ausbreitet, nennt man eine elektromagnetische Welle (Abb. 6.3).
In den Jahren 1887/88 konnte H. Hertz den experimentellen Nachweis
erbringen, dass die Maxwellsche Theorie korrekt ist. Die Ausbreitung und
Erzeugung von elektromagnetischer Strahlung wird durch die einfache Erweiterung des Coulombgesetzes und die von Maxwell vorgeschlagene Erweiterung des Ampèreschen Gesetzes korrekt beschrieben.
6.2 Die Maxwellschen Gleichungen
227
B
E
E i(t)
Abb. 6.3. Andeutung einer elektromagnetischen Welle
B
Die Quellenfreiheit des B -Feldes (Aussage (4)) bleibt auch im dynamischen Fall erhalten. Auch in der Elektrodynamik existieren keine magnetischen Monopole.
Die zusätzlichen Aussagen über die Materialrespons sind unter Umständen
ebenfalls zu modifizieren. Man kann sich vorstellen, dass die Polarisation eines Materials der Variation des anregenden Feldes nicht folgen kann, oder
dass sie auf bestimmte Frequenzen besonders gut anspricht.
Die Grundgleichungen der Elektrodynamik, die Maxwellgleichungen
lauten somit
(1) Coulombgesetz
∇ · D(r, t) = 4πkd ρw (r, t)
(2) Ampèregesetz
∇ × H(r, t) = 4πkh j w (r, t) +
kh ∂D(r, t)
kd
∂t
(6.13)
(3) Faradaygesetz
∇ × E(r, t) = −kf
∂B(r, t)
∂t
(4) Magnetische Quellen
∇ · B(r, t) = 0 .
Dieser Satz von acht Differentialgleichung geht in dem stationären Grenzfall (alle Größen sind zeitunabhängig) in die Gleichungen über, die unter der
Überschrift Elektro- und Magnetostatik diskutiert wurden. Im CGS System
lauten diese Gleichungen
∇ · D(r, t) = 4π ρw (r, t)
∇ × E(r, t) = −
1 ∂
B(r, t)
c ∂t
(6.14)
1 ∂D(r, t) 4π
+
j w (r, t) ,
∇ · B(r, t) = 0
∇ × H(r, t) =
c
∂t
c
im SI System entsprechend1
1
In einigen Lehrbüchern, die das SI System benutzen, werden die Größen
D n = ε0 D und H n = H /µ0 eingeführt.
228
6 Elektrodynamik: Grundlagen
∇ · D(r, t) = ρw (r, t)
∇ × E(r, t) = −
∂
B(r, t)
∂t
(6.15)
∂D(r, t)
+ j w (r, t) .
∂t
Die Aufstellung der Maxwellgleichungen in diesem Abschnitt ist einigermaßen heuristisch. Eine Bestätigung der Korrektheit auf der Basis der Relativitätstheorie wird in Kap. 8 vorgestellt. Eine Auswahl von Anwendungen,
die illustriert, dass alle Aussagen über klassische elektromagnetische Erscheinungen in den Maxwellgleichungen enthalten sind, wird in Kap. 7 betrachtet.
In dem nächsten Abschnitt wird zunächst die Grundlösung der freien Maxwellgleichungen (in dem Raumgebiet von Interesse existieren keine wahren
Ladungen und Ströme), die elektromagnetischen Wellen, vorgestellt.
...
∇ · B(r, t) = 0
∇ × H(r, t) =
7 Elektrodynamik: Anwendungen
275
Auszug aus Kap. 7:
Elektrodynamik: Anwendungen
7.1.2 Hohl- und andere Wellenleiter
In einem Hohlleiter, einem Rohr mit uniformen Querschnitt (Abb. 7.4)
und leitenden Innenwänden, können elektromagnetische Wellen mit geringem
Verlust geführt werden. Der Hohlleiter kann mit einem Dielektrikum gefüllt
sein, das durch einfache Materialgleichungen mit den Materialkonstanten ε
und µ charakterisiert wird. Bei der Diskussion des Hohlleiters ist es für (fast)
z
Abb. 7.4. Modell eines Hohlleiters mit uniformen Querschnitt
ε, µ
alle praktischen Zwecke möglich, die Innenwandung als einen idealen Leiter
anzusehen. Dies bedeutet, dass die Normalkomponente des B -Feldes und die
Tangentialkomponente des E -Feldes auf der Innenfläche verschwinden. Es
wird also vorausgesetzt, dass die Relationen
en · B(r, t)|Rand = 0
en × E(r, t)|Rand = 0
(7.16)
gelten, wobei en die Flächennormale darstellt. In dem Hohlleiter sollen sich
weder wahre Ladungen befinden noch wahre Ströme existieren, so dass die
Situation im Innern des Hohlleiters durch die quellenfreien Maxwellgleichungen
∇ · E(r, t) = 0
(7.17)
∇ · B(r, t) = 0
(7.18)
∇ × E(r, t) = −
1 ∂B(r, t)
c
∂t
(7.19)
εµ ∂E(r, t)
(7.20)
c
∂t
beschrieben wird. In den Gleichungen (7.19) und (7.20) wurden die einfachen Materialgleichungen benutzt. Betrachtet man die Divergenz dieser zwei
Gleichungen, z.B.
∇ × B(r, t) =
∇ · (∇ × E(r, t)) = 0 = −
1 ∂
(∇ · B(r, t)) ,
c ∂t
276
7 Elektrodynamik: Anwendungen
so stellt man fest, dass die Divergenzgleichungen (7.17) und (7.18) automatisch erfüllt sind. Aus den Maxwellgleichungen gewinnt man (siehe Kap. 6.3.2)
die Wellengleichungen
E(r, t) εµ ∂ 2
=0.
(7.21)
∆− 2 2
c ∂t
B(r, t)
Je nach Querschnitt des Hohlleiters können z.B. kartesische Koordinaten oder
Zylinderkoordinaten für die weitere Diskussion eingesetzt werden. Hier sollen
Zylinderkoordinaten mit der longitudinalen Koordinate z und den transversalen Koordinaten r und ϕ benutzt werden. Eine Grundlösung der Wellengleichungen, die der Situation in dem Hohlleiter gerecht wird, sind Wellenlösungen der Form
E(r, t)
E(r, ϕ)
=
exp{i(±p(ω)z − ωt)} .
(7.22)
B(r, t)
B(r, ϕ)
Sie beschreiben die Ausbreitung einer monochromatischen (festes ω) Welle
in Richtung des Hohlleiters. Die Frequenz ω wird durch die Einspeisung vorgegeben. Wie im Fall der freien elektromagnetischen Wellen ist die Vorgabe
von beliebigen Wellenformen möglich, die man mit Hilfe von Superposition
beschreiben kann. Die ‘Wellenzahl‘ p(ω) wird durch die Randbedingungen
bestimmt und erfüllt, wie unten angedeutet, keine einfache Dispersionsrelation. Monochromatische Hohlleiterwellen sind somit keine ebenen Wellen.
Die Maxwellgleichungen (7.17) bis (7.20) ergeben mit dem Ansatz (7.22)
für eine in Richtung der positiven z -Achse laufende Hohlleiterwelle (+ pz)
das folgende Gleichungssystem für die sechs von r und ϕ abhängigen Komponenten des elektromagnetischen Feldes2
1 ∂Ez
− ip Eϕ = ik Br
r ∂ϕ
ip Er −
∂Ez
= ik Bϕ
∂r
1 ∂(rEϕ ) 1 ∂Er
−
= ik Bz
r ∂r
r ∂ϕ
1 ∂Bz
− ip Bϕ = −iεµk Er
r ∂ϕ
ip Br −
∂Bz
= −iεµk Eϕ
∂r
1 ∂(rBϕ ) 1 ∂Br
−
= −iεµk Ez .
r
∂r
r ∂ϕ
2
Die Wellenzahl k ist durch k = ω/c definiert.
(7.23)
7 Elektrodynamik: Anwendungen
277
Diese Komponenten des elektromagnetischen Feldes erfüllen eine Wellengleichung der Form
∂2
2
2
∆ − 2 + εµ k − p
(7.24)
Ki (r, ϕ) = 0 ,
∂z
wobei Ki für Br , Bϕ usw. steht. Eine alternative, oft benutzte Schreibweise
für diese Differentialgleichung in zwei Dimensionen ist
∆t + εµ k 2 − p2 Ki (r, ϕ) = 0 .
Bei den Lösungen der Maxwell- oder der Wellengleichungen des Hohlleiterproblems unterscheidet man drei verschiedene Moden:
Bezeichnung
Transversal magnetisch
Transversal elektrisch
Transversal elektromagnetisch
Abkürzung
TM
TE
TEM
Charakterisierung
Bz = 0
Ez = 0
Ez = Bz = 0
Die zwei ‘normalen‘ Moden TM und TE sind dadurch charakterisiert, dass
für alle Punkte in dem Hohlleiter entweder die z -Komponente des B -Feldes
oder des E -Feldes verschwindet. Neben diesen zwei Grundtypen kann noch
ein dritter Lösungstyp auftreten. Verschwinden die z -Komponenten beider
Felder für alle Punkte, so liegt eine TEM-Welle vor. Die drei Grundtypen
von Hohlleiterwellen sollen, beginnend mit den TEM-Wellen etwas genauer
charakterisiert werden.