radds - max3Dshop
Werbung

BENUTZERHANDBUCH
RADDS
Oktober 2014
Ausgabe 1
Benutzerhandbuch verfasst von @mundsen
Übersetzt von loco
Max3dshop
http://max3dshop.org
BENUTZERHANDBUCH
ATTRIBUTION-NONCOMMERCIAL-SHAREALIKE 3.0 UNPORTED (CC BY-NC-SA 3.0)
ii
BENUTZERHANDBUCH
Inhaltsverzeichnis
1
Einleitung ..................................................................................................... Error! Bookmark not defined.
1.1 .... RADDS ..................................................................................................................................................................................... 4
2
Anschluss und Konfiguration............................................................... Error! Bookmark not defined.
2.1 .... Anschlussschema ............................................................................................... Error! Bookmark not defined.
2.1.1 RADDS .............................................................................................................................................................................................6
2.1.2 RADDS Abmessungen ..............................................................................................................................................................7
2.1.3 RADDS + LCD ...............................................................................................................................................................................8
2.1.4 Netzteil........................................................................................................................... Error! Bookmark not defined.
2.1.5 Betrieb mit 24V-Netzteil ........................................................................................ Error! Bookmark not defined.
2.1.6 Schrittmotoren und Schrittmotortreiber ....................................................... Error! Bookmark not defined.
2.1.7 RADDS + Endschalter ............................................................................................................................................................ 20
2.1.8 Anschluss des Extruders ........................................................................................ Error! Bookmark not defined.
2.2 .... Anschlussbeispiel (OrdBot Hadron 3D Drucker) ............................................................................................. 22
2.2.1 Voraussetzungen ....................................................................................................... Error! Bookmark not defined.
2.2.2 OrdBot Achsen ......................................................................................................................................................................... 23
2.2.3 RADDS OrdBot Anschlussdiagramm .............................................................................................................................. 24
2.2.4 Einrichtung .................................................................................................................. Error! Bookmark not defined.
3
Anhang/ Notizen ....................................................................................... Error! Bookmark not defined.
iii
BENUTZERHANDBUCH
1 Einleitung
1.1 RADDS
Das RADDS-Board bietet folgende Anschlussmöglichkeiten:
6 Schrittmotoren: z.B. 3 Achsen und 3 Extruder (2 Steckplätze sind mit doppelten
Motoranschlüssen ausgestattet)
6 Hochleistungsausgänge: z.B. 1 beheiztes Druckbett, 3 Hotends und 2 Lüfter
SD-Kartenleser (micro-SD Steckplatz, optional ein externer SD Steckplatz)
Standard LCD (5V) - 4x20 Zeichen (zu HD44780 Kompatibel)
Drehgeber (auf dem LCD Board)
6 Endschalter
5 Thermistoren und ein ADC (Analog - Digital Wandler)
3 Servomotoren (Standard Modellbauservos)
I2C, SPI, CAN, DAC, RS232 und 8 digitale Schaltausgänge (über Stiftleisten)
Weitere Merkmale:
EEPROM
Kontroll-LEDs für Betriebsspannung und Hochleistungsausgänge
Freilaufdioden an den FETs
KFZ-Flachsicherungen statt Thermosicherungen
Betrieb mit 24V möglich (Diode D1 muss durch drei 4V, 1.3W Zenerdioden
getauscht werden; Seite 10 )
Heizbett-Strom bis 15A ohne zusätzlichen Kühlkörper
Hochwertige Schraubklemmen
Max3dshop
http://max3dshop.org
RADDS
2 Anschluss und Konfiguration
2.1 Anschlussschema
5
RADDS
2.1.1
RADDS
6
RADDS
2.1.2
RADDS Abmessungen
7
RADDS
2.1.3
RADDS + LCD
8
RADDS
2.1.4
Netzteil
Die Schrittmotoren benötigen zusammen mit einem Hotend bis zu 5A, ein beheiztes
Druckbett etwa 5-15A.
Ein durchschnittlicher Drucker muss insgesamt mit etwa 18-20A versorgt werden, was an
12V einer Leistung zwischen 220W und 240W entspricht.
Unter bestimmten Umständen ist auch der Betrieb mit weniger Leistung möglich.
Mehr Informationen über Netzteile (Englisch): http://reprap.org/wiki/Power_Supply
Empfohlene minimale Kabelquerschnitte für die Stromversorgung:
1,5mm² (bzw. 16 AWG) – von Netzteil zum Heizbetteingang des RADDS und von RADDS zu
Heizbett
0,75mm² (bzw. 18 AWG) – von Netzteil zu RADDS
9
RADDS
2.1.5
Betrieb mit 24V-Netzteil
Soll das RADDS-Board mit 24V betrieben werden, ist es nötig die bereits verbaute Diode
durch drei Zenerdioden (4V, 1.3W) zu ersetzen (Polarität beachten, siehe Abbildung).
Die Zenerdioden reduzieren die Spannung auf 12V. Dies ist nötig um den Arduino Due mit
einer geeigneten Spannung zu versorgen.
Diese Modifikation ist OPTIONAL und nicht vom Hersteller Empfohlen.
10
RADDS
2.1.6
Schrittmotor und Schrittmotortreiber
2.1.6.1 Schrittmotor
Bevor die Schrittmotoren an das RADDS-Board oder den Silencioso-Schrittmotortreibern
angeschlossen werden, ist es nötig weitere Details der Motoren zu kennen.
Suchen Sie mithilfe von Google nach der auf dem Motor angegeben Typbezeichnung.
Versuchen Sie einen Schaltplan oder ein Datenblatt vom Hersteller zu finden. Darin sind
normalerweise die Polung der Spulen und die zugehörigen Kabelfarben zu finden.
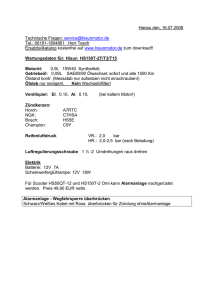
Beispiel:
Anschlussschema für Schrittmotor Wantai 42BYGHW609 (Quelle: www.wantamotor.com).
Sollte keine Typbezeichnung auf dem Motor zu finden sein, gibt es noch eine weitere
Möglichkeit die zu den Spulen gehörenden Kabelfarben herauszufinden. Werden die beiden
Pole einer Spule miteinander verbunden, schließt dies den Stromkreis. Dabei steigt das
Rastmoment des Motors enorm an, was nun durch drehen der Motorwelle festgestellt
werden kann.
1. Drehen Sie die Motorwelle, ohne dass sich die Kabel berühren. Die Welle sollte sich
leicht drehen lassen, unter Umständen ist eine leichte Rasterung zu spüren.
2. Verbinden sie genau zwei Kabel miteinander. Ist nun beim Drehen eine deutlich
stärkere Rasterung zu spüren, gehören beide Kabel zu einer Spule.
3. Ist keine stärkere Rasterung zu spüren, verbinden Sie zwei andere Kabel
miteinander. Wiederholen Sie den Vorgang, bis sie beide Pol Paare des Motors
gefunden haben
11
RADDS
Spule 1 = 1A + 1B
Spule 2 = 2A + 2B
Die Kabelfarben eines Wantai 42BYGHW609 sind wie folgt:
1A = Schwarz
1B = Grün
2A = Blau
2B = Rot
Es spielt keine Rolle, ob die Spulen vertauscht am Schrittmotortreiber
angeschlossen werden, dies ändert lediglich die Drehrichtung des Motors.
Sollte die Drehrichtung nicht stimmen, kann dies in der Konfiguration angepasst
werden.
12
RADDS
2.1.6.2
Mikroschritte
Jeder Schrittmotor besitzt eine bestimmte Anzahl an Schritten pro Umdrehung.
Durch die Verwendung von Mikroschritten ist es möglich die Anzahl der Schritte
elektronisch zu multiplizieren.
Dabei werden die Spulen im Motor mit Sinus- bzw. Cosinus förmigen Strömen
versorgt.
In den meisten Fällen führt die Verwendung von Mikroschritten zu einem ruhigeren
lauf und erhöhter Genauigkeit.
Bei den Mikroschritten zwischen den Polpositionen (=Vollschritten) wird ein
geringeres Drehmoment erreicht. Im Gegenzug sinken die mechanischen
Schwingungen drastisch, was sich durch eine höhere mögliche Schrittfrequenz
bemerkbar macht.
Werden die Motoren nahe am Drehmomentlimit betrieben (z.B. durch hohe Reibung),
bewirken Mikroschritte (verglichen mit Halbschritten) praktisch keine Verbesserung
der Genauigkeit mehr.
Sind die Motoren ausreichend bzw. überdimensioniert, können Mikroschritte die
Positioniergenauigkeit stark erhöhen.
Quelle (Englisch): http://www.reprap.org/wiki/Stepper_motor#Micro_stepping
Möchten sie die Anzahl der Mikroschritte an einer oder mehreren Achsen verändern,
müssen die Schrittmotortreiber und die Firmware entsprechend angepasst werden.
An den Silencioso Schrittmotortreibern können die Mikroschritte einfach über die
aufgebrachten Dip-Schalter verändert werden.
Um die Firmware anzupassen, ist es notwendig die entsprechende Einstellung in der Datei
„configuration.h“ anzupassen.
Mit jeder Erhöhung der Mikroschritte um eine Stufe, verdoppelt sich die Anzahl der Schritte
pro Umdrehung.
Beispiel:
Sie nutzen Momentan 1/16 Mikroschritte, die Anzahl der Schritte pro mm steht auf „80“.
Verdoppeln Sie nun auf 1/32 Mikroschritte, muss die Anzahl der Schritte pro mm auch auf
„160“ verdoppelt werden.
13
RADDS
// #define DEFAULT_AXIS_STEPS_PER_UNIT
{78.7402,78.7402,200.0*8/3,760*1.1} // default steps per unit for Ultimaker
//#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2560,107} // default steps
per unit for OrdBot 1/16
#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,5120,214} // default steps
per unit for OrdBot 1/32
Beispielcode der Marlin-Firmware
Anhand der Zeile „//#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2560,107} // default
steps per unit for OrdBot 1/16“ lässt sich die Einstellung für 1/16 Mikroschritte eines
OrdBot herausfinden.
{80, 80, 2560, 107 }
X-Achse = 80 Schritte/mm
Y-Achse = 80 Schritte/mm
Z-Achse = 2560 Schritte/mm
Extrudermotor = 107 Schritte/mm (dieser Wert gilt für den „Bulldog Lite“ Extruder und
muss evtl. an den verbauten Extruder angepasst werden)
In der nächsten Code-Zeile „#define DEFAULT_AXIS_STEPS_PER_UNIT {160,160,5120,214 //
default steps per unit for OrdBot 1/32“ sind dementsprechend die Werte für 1/32
Mikroschritte zu finden. Alle Werte wurden im Vergleich zu 1/16 Mikroschritten
verdoppelt.
14
RADDS
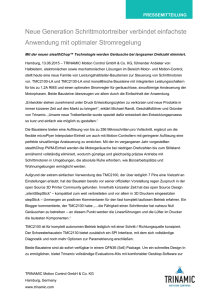
2.1.6.3 Mikroschritte am RADDS 1.1 einstellen
Nur bei Verwendung von Schrittmotortreibern, die direkt auf das RADDS-Board aufgesteckt
werden (z.B. A4988, DRV8825). Externe Schrittmotortreiber wie der Silencioso nutzen
eigene Schalter.
Um die Mikroschritte einzustellen, müssen die hier farbig gekennzeichneten Leiterbahnen
verbunden bzw. durchtrennt werden.
Die in der folgenden Tabelle zu findenden Mikroschritteinstellungen gelten für die meisten
Schrittmotortreiber.
A4988
MS1
MS2
L
L
H
L
L
H
H
H
H
H
RAPS128
MS1
MS2
MS3 STEP
L
L
L
1
H
L
L
1/2
L
H
L
1/4
H
H
L
1/8
L
L
H
1/16
H
L
H
1/32
L
H
H
1/64
H
H
H
1/128
L = getrennte Leiterbahn, H = geschlossene Leiterbahn (MS Pin = 3,3V = Standard)
Bei der Verwendung von DRV8825, führen alle nicht aufgeführten Kombinationen zu 1/32
Mikroschritten.
MS3
L
L
L
L
H
DRV8825
MS1
MS2
L
L
H
L
L
H
H
H
L
L
H
H
MS3
L
L
L
L
H
H
WICHTIG: Die auf dem Board (bzw. dem Schrittmotortreiber) gewählte Einstellung muss
zur Konfiguration der Firmware passen.
15
RADDS
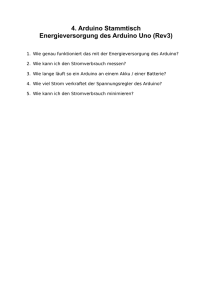
2.1.6.4
Schrittmotortreiber (z.B. A4988, DRV8825) oder Adapter aufstecken
Beispielhaft wurden hier die Adapterplatinen der Silencioso Schrittmototreibern gewählt.
Die Beschriftungen sind aber auch auf den konventionellen Schrittmotortreibern zu finden.
Die Schrittmotortreiber für X, Y und Z müssen mit dem DIR-Pin oben rechts aufgesteckt
werden, die Treiber für E1, E2 und E3 mit dem DIR-Pin nach unten links (siehe Abbildung).
An den Stiftleisten für X, Y und Z gehören die schwarzen Motorkabel nach oben,
an den Stiftleisten für E1, E2 und E3 gehören sie nach unten.
Um zwei Motoren an einen Treiber anschließen zu können, sind die Steckplätze für Z und
E3 mit jeweils zwei Reihen Stiftleisten ausgestattet.
16
RADDS
2.1.6.5 Anschlussschema bei Nutzung externer Schrittmotortreiber
Folgende Abbildung zeigt, wie ein Silencioso-Schrittmotortreiber zusammen mit einem
Schrittmotor an das RADDS-Board angeschlossen wird.
17
RADDS
2.1.6.6 Zwei Z-Schrittmotoren mit zwei Silencioso-Schrittmotortreibern
Orientieren Sie sich an diesem Anschlussschema, wenn zwei Schrittmotoren einen
Silencioso-Schrittmotortreiber überlasten würden.
18
RADDS
2.1.6.7
Zwei Schrittmotoren mit einem Silencioso-Schrittmotortreiber
Kann ein Silencioso-Schrittmotortreiber zwei Motoren ausreichen mit Strom versorgen,
gehen Sie nach folgenden Anschlussschema vor.
19
RADDS
2.1.7
RADDS + Endschalter
Ab Werk sind keine Stiftleisten für die 3,3V Spannungsversorgung der Endschalter
eingelötet, da mechanische Endschalter diese nicht benötigen.
Mechanische Endschalter:
Schließen Sie die mechanischen Endschalter so an, dass die Verbindung GND – SIGNAL im
unbetätigten Zustand geschlossen ist (normal Geschlossen = NC).
Hall-Effekt-Endschalter (berührungslos magnetisch):
WICHTIG!!
Bei der Nutzung von
elektronischen
Endschaltern, achten Sie
darauf, dass diese auf der
SIGNAL Leitung max. 3,3V
ausgeben
Bei der Verwendung von Hall-Effekt-Endschaltern, muss die +5V Leitung mit dem
entsprechenden Pin verbunden werden (siehe Abbildung).
20
RADDS
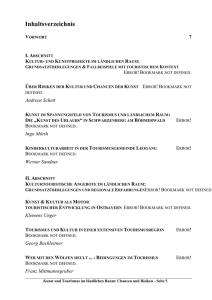
2.1.8
Anschluss des Extruders
Die Abbildung zeigt einen Extruder mit Direktantrieb.
Bei der Verwendung eines Bowden-Extruders ändert sich am elektrischen Anschluss nichts.
Anschluss:
-
Schrittmotor an EXT1
Hotend Lüfter an FAN 1
Filament Lüfter an FAN 2
Thermistor an Thermistor 1
Heizwiderstand bzw. Heizpatrone an Heater 1
Beim Anschluss weiterer Extruder, müssen diese an den Entsprechenden Anschlüssen
EXT2, Thermistor 2 und Heater 2 angeschlossen werden.
Die Hotend und Filament Lüfter teilen sich einen gemeinsamen Anschluss.
21
RADDS
2.2 Anschlussbeispiel (OrdBot Hadron 3D Drucker)
2.2.1
Voraussetzungen
Der OrdBot Hadron ist ein 3D Drucker mit kartesischem Koordinatensystem, bei dem die X-,
Y- und Z-Achse jeweils getrennt angesteuert wird.
OrdBot Hadron Mechanik-Set
Arduino DUE + RADDS Board
RADDS LCD Board
Externe Silencioso Schrittmotortreiber, angebracht an den Schrittmotoren
Mechanische Endschalter an X-, Y- und Z-Achse
Mk2B Heizbett
Extruder
Hotend
Hotend Lüfter (12v)
Filament Lüfter (12v)
LED Streifen (12v) (um den Druckraum zu beleuchten)
12V Netzteil
1/64 Mikroschritte an Z-Achse und Extruder
1/128 Mikroschritte an X- und Y-Achse
22
RADDS
2.2.2
OrdBot Achsen
23
RADDS
2.2.3
RADDS OrdBot Anschlussschema
24
RADDS
2.2.4
Einrichtung
Rüsten Sie die Schrittmotoren mit den Silencioso-Schrittmototreibern aus (separate
Anleitung erhältlich)
Stecken Sie das RADDS-Board auf den Arduino Due auf
Stecken Sie die Adapter der Silencioso-Schrittmotortreiber auf das RADDS-Board
und achten Sie auf die korrekte Ausrichtung (S.16)
Verbinden Sie das RADDS-LCD-Board mit dem RADDS-Board
Schließen Sie die Schrittmotortreiber an. In diesem Beispiel mit zwei SilenciosoSchrittmotortreibern für zwei Schrittmotoren an der Z-Achse (2.1.4.3)
Schließen Sie den Extrudermotor an EXT1 an
Schließen Sie die Heizpatrone bzw. den Heizwiderstand den Hotends an Heater 1 an
Schließen Sie den Hotend-Thermistor an Thermistor 1 an
Schließen Sie den Hotend Lüfter an Fan 1 an
Schließen Sie den Filament Lüfter an Fan 2 an
Schließen Sie den LED-Streifen (12V) an Heater 3 an
Schließen Sie den Heizbett-Thermistor an Thermistor 4 an
Schließen Sie das 12V Heizbett an 12V out HeatedBed an
Schließen Sie 12V des Netzteils an 12V in HeatedBed (auf der rechten Seite) an
Schließen Sie 12V den Netzteils an 12V in (auf der linken Seite) an
Verbinden Sie das USB Kabel mit dem Programmieranschluss (in der linken unteren
Ecke des Arduino DUE)
WICHTIG – bevor Sie den Drucker nun das erste Mal in Betrieb nehmen, muss die Firmware
passend Konfiguriert sein.
Stellen Sie sicher, dass alles korrekt angeschlossen ist.
Eine fehlerhafte Verkabelung kann zu Schäden an der Elektronik führen.
25
RADDS
3 Anhang/ Notizen
max3dshop: http://max3dshop.org/
RepRap RADDS wiki: http://reprap.org/wiki/RADDS
Martin Henschke: http://www.dr-henschke.de/RADDS_due.html
Arduino DUE: http://arduino.cc/en/Main/ArduinoBoardDue
Arduino Software: http://arduino.cc/en/Main/Software
26