Kinematik - Universität Zürich
Werbung

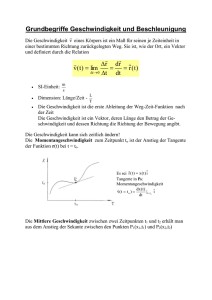
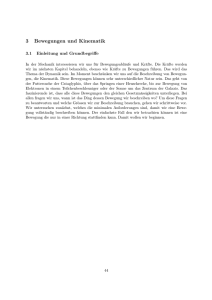
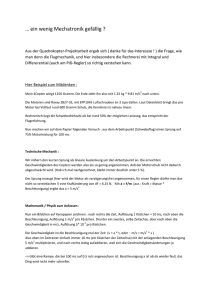
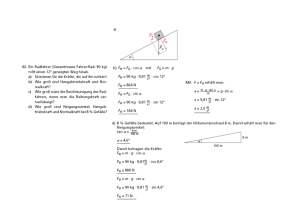
Physik für Studierende der Biologie und Chemie Universität Zürich, HS 2009, U. Straumann Version 20. September 2009 Inhaltsverzeichnis 3 Mechanik 3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Kinematik: Geradlinige Bewegung . . . . . . . . . . . . 3.2.1 Einführung der Begriffe . . . . . . . . . . . . . . . . . 3.2.2 Vertikaler Sprung oder Wurf . . . . . . . . . . . . . . 3.2.3 Experimentelles Beispiel . . . . . . . . . . . . . . . . . 3.3 Repetition Vektoralgebra . . . . . . . . . . . . . . . . . . 3.3.1 Rechenoperationen . . . . . . . . . . . . . . . . . . . . 3.3.2 Polarkoordinatendarstellung . . . . . . . . . . . . . . . 3.3.3 Einheitsvektor und Ortsvektor . . . . . . . . . . . . . 3.3.4 Skalarprodukt (inneres Produkt) . . . . . . . . . . . . 3.3.5 Vektorprodukt (äusseres Produkt) . . . . . . . . . . . 3.4 Bewegung in zwei und drei Dimensionen . . . . . . . . 3.4.1 Differenzieren des Orts- und Geschwindigkeitsvektors . 3.4.2 Beispiele: Schuss, Sprung und Wurf . . . . . . . . . . . 3.4.3 Bewegung entlang einer Kreisbahn . . . . . . . . . . . 3.4.3.1 Konstante Schnelligkeit . . . . . . . . . . . . 3.4.3.2 Variable Schnelligkeit . . . . . . . . . . . . . 3 3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 3.1 3.2 3.2 3.5 3.7 3.10 3.10 3.11 3.11 3.12 3.14 3.14 3.14 3.16 3.17 3.17 3.19 Mechanik Einleitung In der Mechanik interessieren wir uns für Bewegungsabläufe, solche des täglichen Lebens, solche extrem grosser Massen über astronomische Distanzen oder solche submikroskopischer Teilchen bei extrem hohen Geschwindigkeiten. Alle diese Bewegungen unterliegen den gleichen Gesetzmässigkeiten. Um diese zu erkennen gehen wir schrittweise vor. Wir untersuchen zunächst, welches die minimalen Anforderungen sind, damit wir eine Bewegung vollständig beschreiben können. Der einschlägige physikalische Oberbegriff ist Kinematik. Wenn dann die Beschreibung vorliegt, fragen wir nach den Ursachen für eine bestimmte Bewegungsform. Die Kinematik wird dann zur Dynamik erweitert. 3.1 3.2 3.2.1 Kinematik: Geradlinige Bewegung Einführung der Begriffe Wir schränken vorerst die beobachteten Bewegungen ein auf Fälle, wo die Bewegung geradlinig ist. Dies kann entlang der Horizontalen passieren wie bei einem Auto auf ebener Strasse, in der Vertikalen wie beim Fall oder entlang einer geneigten Ebene. Die Ursache der Bewegung interessiert uns für den Moment nicht. Ferner soll das sich bewegende Objekt entweder ein extrem kleines, nahezu punktförmiges Teilchen sein, wie z. B. ein Elektron, oder ein ausgedehntes Objekt, bei dem alle Teile starr miteinander verbunden sind. Im letzteren Fall bewegen sich alle Teile in gleicher Weise sich in der gleichen Richtung, wenn man Rotation ausschliesst, wie z. B. bei einem Skifahrer in einem geraden Schussteil einer Abfahrt. Ein Objekt zu lokalisieren bedeutet die Position relativ zu einem Referenzpunkt festzustellen, den man häufig als Ursprung (origo: O) einer Achse bezeichnet, hier x−Achse genannt: - x O Die Position entlang dieser Achse, der Ort x, wird in Vielfachen eines Achsenabschnitts (z. B. 1 cm) gemessen. In welcher Richtung sich das Objekt bewegt wird durch das Vorzeichen angegeben: negative Richtung −4 −3 −2 −1 O 1 2 3 4 5 6 positive Richtung +x 7 [cm] Bewegt sich ein Objekt von einem Ort x1 zu einem anderem Ort x2 , so ist die Ortsveränderung (Verschiebung): ∆x = x2 − x1 (3.1) Mit dem Symbol ∆ bezeichnen wir immer die Änderung der entsprechenden Grösse. Die Ortsveränderung sollte nicht mit dem zurückgelegtem Weg verwechselt werden : 1 3 - 5 ∆x = 4 cm, Weg = 4 cm 1 3 - 5 ∆x = 2 cm, Weg = 6 cm 3 5 ∆x = −4 cm, Weg = 4 cm 1 Bei der hier betrachteten geradlinigen Bewegung braucht es nur eine einfache Zahl, um den Ort anzugeben, eine Koordinate. Ebenfalls braucht es nur eine Zahl um die Ortsveränderung anzugeben. Es handelt sich um eine eindimensionale Bewegung. Es gibt einen Freiheitsgrad. Ort und Ortsveränderung können durch einen Skalar angegeben werden. Im nächsten Kapitel werden wir dann allgemeinere Bewegungen im Raum betrachten. Dort braucht es im allgemeinen drei Zahlen, um einen Ort anzugeben, die drei Koordinaten. Die 3.2 Ortsveränderung wird ebenfalls durch drei Zahlen (drei Koordinaten oderBetrag und Richtung) angegeben. Im dreidimensionalen Raum ist die Orstveränderung eine Vektorgrösse. Zurück zu den geradlinigen Bewegungen: Eine kompakte Form geradlinige Bewegungen darzustellen, ist ein Diagramm, das x als Funktion der Zeit t darstellt. Als Beispiel zeigt uns Abbildung 3.1 die Höhe über dem Boden, die das in Abbildung 3.2 gezeigte Gürteltier während seines Sprungs erreicht. x[m] x2,t2 0.7 0.5 0.3 0.1 x1,t1 α 0.2 0.4 0.6 t[s] Abbildung 3.1: Sprunghöhe über dem Boden x [m] in Funktion der Zeit t [s] für das springende Gürteltier Abbildung 3.2: Aufgeschrecktes Gürteltier Das Diagramm in Abbildung 3.1 beschreibt nicht nur die Bewegung, sondern offenbart auch wie schnell sich das Gürteltier bewegt. Mehrere physikalische Grössen sind mit der Aussage “wie schnell” assoziiert. Eine ist die mittlere Geschwindigkeit v= ∆x x2 − x1 Ortsveränderung = = ∆t t2 − t1 Zeitintervall (3.2) Die mittlere Geschwindigkeit (velocity) entspricht der Steigung tan α der Geraden, die den Anfangspunkt x1 (t1 ) mit dem Endpunkt x2 (t2 ) des Intervalls verbindet. Auch v wird erst durch Betrag und Richtung bestimmt. Das Vorzeichen von v wird durch ∆x bestimmt, da bei einer Messung zu aufeinanderfolgenden Zeiten ∆t immer positiv ist. Die mittlere Schnelligkeit s= zurückgelegter Weg Zeitintervall 3.3 (3.3) ist eine weitere Art, wie die Phrase “wie schnell” ausgelegt werden kann. Im in Abbildung 3.1 eingezeichneten Weg des Gürteltiers bis zum Maximum sind die Definitionen von v und s gleich. Dies gilt auch, wenn man zum Beispiel die Zeit misst, die eine Kugel, eine Schallwelle oder ein Zug zwischen zwei Orten bekannter Entfernung braucht, und aus Entfernung und Zeit die mittlere Schnelligkeit oder Geschwindigkeit bestimmt. Nimmt man aber z. B. beim Gürteltier auch den Rückweg mit, so ist v = 0 wegen ∆x = 0. s ist jedoch für den Aufstieg und Fall gleich. “Wie schnell” kann aber auch bedeuten, wie schnell bewegt sich ein Objekt in einem bestimmten Zeitpunkt, was ist seine momentane Geschwindigkeit. Diese momentane Geschwindigkeit definieren wir als den Grenzwert der mittleren Geschwindigkeit, wenn das Zeitintervall immer kleiner wird. v = (momentane) Geschwindigkeit = lim ∆t→0 ∆x dx ≡ ∆t dt (3.4) Der Zusatz “momentan” wird in der Physik in der Regel weggelassen. Obwohl der Nenner im obigen Grenzwert, das Zeitintervall ∆t, immer kleiner wird, ist der Grenzwert normalerweiser endlich, weil auch der Zähler immer kleiner wird. Nennen wir x2 = x(t), t2 = t und x1 = x(t0 ), t1 = t0 , dann ist die Geschwindigkeit zur Zeit t0 gegeben durch v(t0 ) = lim t→t0 x(t) − x(t0 ) dx |t=t0 ≡ t − t0 dt (3.5) In der Sprache der Mathematik – das Bilden solcher Grenzwerte wird in der Differentialrechnung behandelt – ist die Geschwindigkeit v(t0 ) die Ableitung der Funktion x(t) an der Stelle t0 (siehe auch Storrer: Einführung in die mathematische Behandlung der Naturwissenschaften, Kap. 4, “Die Ableitung”, p. 39 – 55). Wenn man die Differenzen im Quotient gegen Null gehen lässt, macht man den Übergang vom Differenzenquotient zum Differentialquotient. Geometrisch entspricht die Ableitung der Steigung der Tangente an die Kurve x(t) im Punkt t0 (siehe Abbildung 3.3): x(t) − x(t0 ) v(t0 ) = lim = tan α0 (3.6) t→t0 t − t0 x(t) x(t) ∆x x(t0) α ∆t α0 t0 Abbildung 3.3: Geometrische Bedeutung der Ableitung: Übergang vom Differenzenquotienten zum Differentialquotienten entspricht dem Übergang von der Steigung der Sekanten zur Steigung der Tangenten. t Für die Ableitung werden auch alternativ die Bezeichnungen dx , oder ẋ dt (3.7) verwendet. Das Bilden der Ableitung wird Differenzieren genannt. Die entsprechenden Methoden werden z. B. in Storrer, op. cit., Kap. 5 “Technik des Differenzierens”, p. 63 – 75 behandelt. 3.4 Der Betrag der Geschwindigkeit wird Schnelligkeit genannt. Für unser Gürteltier (Abbildung 3.1) können wir durch Messung der Steigung der Tangente die Geschwindigkeit ermitteln. Es ergibt sich die in Abbildung 3.4 dargestellte Geschwindigkeitskurve. v6 6a [m/s2 ] @ ←@ [m/s] @ @ 2 Abbildung 3.4: Geschwindigkeit [m/s] (linke Skala) und Beschleunigung [m/s2 ] (rechte Skala) des Gürteltiers (Abbildungen 3.1 und 3.2). 0.1 -2 10 @ v(t) @ @ @ @ @ ↓ Max. Höhe @ 0.3 @ 0.5 @ @ @ @ a(t) @ @ - 0.7 t [s] → -10 @ @ @ @ Wenn ein Objekt seine Geschwindigkeit ändert, sprechen wir von Beschleunigung. Im täglichen Leben bedeutet Beschleunigung normalerweise Geschwindigkeitszunahme, in der Physik enthält dieser Begriff sowohl Zu- wie Abnahme, also auch das Abbremsen. Die mittlere Beschleunigung (acceleration) a wird definiert als v2 − v1 ∆v a= (3.8) = t2 − t1 ∆t Analog zur Definition der momentanen Geschwindigkeit definieren wir als momentane Beschleunigung dv v(t) − v(t0 ) dv a= oder präziser a(t0 ) = lim |t=t0 = (3.9) t→t0 dt t − t0 dt Die Beschleunigung a(t) ist gegeben durch die Steigung der Tangente an die Kurve v(t). 3.2.2 Vertikaler Sprung oder Wurf Bei dem Gürteltier (Abbildung 3.4), das senkrecht nach oben springt, handelt es sich um eine eindimensionale Bewegung in vertikaler Richtung. Es bewegt sich zuerst nach oben, und dann wieder nach unten. Im Geschwindigkeitsdisgramm ist v(t) eine Gerade, d. h. die Steigung der Kurve ist konstant und negativ: a = −9.8 m/s2 (Gravitationsbeschleunigung auf der Erdoberfläche). Die Geschwindigkeit ist zuerst positiv (nach oben) und dann negativ (nach unten). Die Umkehroperation des Differenzierens ist das Integrieren (siehe Storrer, op. cit., Kap. 9). So wie man v(t) und a(t) durch Differenzieren von x(t) bzw. v(t) erhält, kann man umgekehrt x(t) 3.5 und v(t) durch Integrieren von v(t) bzw. a(t) erhalten: Z t v(t) = Z t a(t0 )dt0 + v(t0 ) x(t) = v(t0 )dt0 + x(t0 ) (3.10) t0 t0 v(t) ist eine Stammfunktion von a(t), x(t) ist eine Stammfunktion von v(t) (Storrer, op. cit., Kap. 12, p. 156 ff.). Wir haben die Integrationsvariable t0 getauft, um sie von der oberen Grenze des Integrals t zu unterscheiden. Für den Spezialfall konstanter Beschleunigung erhalten wir ⇒ v(t) = a(t) = a0 Z t a0 dt0 + v(t0 ) = a0 (t − to ) + v(t0 ) (3.11) t0 t0 = 0, v(0) = v0 Z t x(t) = 0 Z t 0 v(t )dt + x(t0 ) = t0 ⇒ v(t) = a0 t + v0 0 0 a0 (t − to )dt + t0 Z t (3.12) v(t0 )dt0 + x(t0 ) (3.13) t0 a0 (t − t0 )2 + v(t0 )(t − t0 ) + x(t0 ) (3.14) 2 a0 t0 = 0, v(0) = v0 , x(0) = x0 ⇒ x(t) = t2 + v0 t + x0 (3.15) 2 Wenn wir den Verlauf von v(t) und a(t) gegen die Zeit auftragen, wie wir dies am Beispiel des Gürteltiers in Abbildung 3.4 getan haben, dann lässt sich das Integral auch aus der graphischen Darstellung bestimmen. Abbildung 3.5 zeigt, dass die Fläche unter der Geschwindigkeitskurve dem zurückgelegten Weg entspricht. x(t) = v0 6 Abbildung 3.5: Geschwindigkeitsverlauf für eine konstante Beschleunigung. Die schraffierte Fläche entspricht dem zwischen der Zeit t0 und der Zeit t zurückgelegten Weg. tE markiert das Ende der Bewegung, für das Gürteltier aus Abbildung 3.1 die Rückkehr zum Boden. Da die Steig- und Fallhöhe gleich sind, ist die Fläche der beiden Dreiecke oberhalb und unterhalb der Achse gleich. @ @ v(t) @ v0 − a0 t @ @ @ @ @ @ @ ↓ Max. Höhe @ t0 t @ @ @ @ @ @ @ tE - t @ @ @ @ 3.6 3.2.3 Experimentelles Beispiel Zum Abschluss betrachten wir als Beispiel die Bewegung eines reibungsfrei gleitenden Reiters auf einer Luftkissenschiene (Abbildung 3.6). Im ersten Fall (Abbildung 3.7 läuft der Reiter mit konstanter Geschwindigkeit bis zum Ende der Schiene, wo durch den Stoss mit Begrenzung die Bewegungsrichtung und die Geschwindigkeit umgekehrt wird. Im zweiten Fall (Abbildung 3.8) ist der Reiter an den beiden Enden mit einer dünnen Feder befestigt. Die Bewegung des Reiters kann mit einer elektrischen Messvorrichtung registriert werden. In festen Zeitabständen wird die Position gemessen. Die beiden Abbildungen zeigen zwei solche Messprotokolle. Durch Berechnen des Differenzenquotienten kann die Geschwindigkeit numerisch ermittelt werden, ebenso aus den Geschwindigkeitsdifferenzen die Beschleunigung. Abbildung 3.6: Luftkissenschiene. Die Analyse des ersten Messprotokolls – konstante Schnelligkeit – bestätigt die Beziehungen, die wir oben für den Spezialfall konstanter Beschleunigung gemacht haben. Ausser an den Enden, wenn sich die Bewegungsrichtung umkehrt, ist a(t) = 0, v(t) = v0 auf dem Hinweg und v(t) = −v0 für den Rückweg und damit messen wir eine lineare Zunahme bzw. Abnahme des Ortes mit der Zeit für den Hin- bzw. Rückweg. Die Tatsache, dass der Reiter immer wieder die gleiche Strecke zwischen den beiden Enden zurücklegt, macht seine Bewegung zu einer periodischen Bewegung, hier durch die Sägezahnkurve repräsentiert. Das zweite Messprotokoll zeigt ebenfalls eine periodische Bewegung. Wir erkennen in der Kurve eine Sinus- bzw. Cosinusfunktion. Nennen wir die Zeit, die der Reiter für den Hin- und Rückweg braucht die Periode T , die maximale Distanz vom Zentrum der Schiene, die der Reiter erreicht A, dann können wir die gemessene Kurve durch die folgende Funktion beschreiben: x(t) = A cos( 2π t) = A cos(ωt) T ω≡ 2π T (3.16) Man überzeugt sich leicht, dass für x = A gilt für t = 0, t = T und für alle weiteren Zeiten 3.7 t = nT , mit n = ganze Zahl. Durch Differenzieren finden wir 2π 2π v(t) = dx dt = − T A sin( T t) = −ωA sin(ωt) 4π 2 A cos( 2π t) = −ω 2 A cos(ωt) = − a(t) = dv T dt T2 (3.17) Diese Zusammenhänge werden durch die Messprotokolle bestätigt. Die neu eingeführte Grösse ω nennt man auch die Kreisfrequenz. 3.8 Luftkissen 4.11.93 Donnerstag, 4. November 1993 9:20 Uhr Ort x (t) 2 0 100.000 -2 Anzahl Messungen Geschwindigkeit v (t) 0 1 2 3 4 5 -0.15 0 1 2 3 4 5 1 2 3 4 5 0.15 0 0.0500 Intervall Beschleunigung a (t) 0.05 0 -0.05 0 Abbildung 3.7: Messprotokoll für den mit konstanter Schnelligkeit auf der Luftkissenschiene sich hin- und herbewegenden Reiter. Luftkissen 4.11.93 Donnerstag, 4. November 1993 9:20 Uhr Ort x (t) 0.4 0 100.000 Anzahl Messungen Geschwindigkeit v (t) -0.4 0 1 2 3 4 5 -0.15 0 1 2 3 4 5 1 2 3 4 5 0.15 0 0.0500 Intervall Beschleunigung a (t) 0.05 0 -0.05 0 Abbildung 3.8: Messprotokoll für den sich periodisch an eine Feder gekoppelt hin- und herbewegenden Reiter auf der Luftkissenschiene. 3.9 3.3 Repetition Vektoralgebra Siehe auch Storrer, op. cit., Kap. 1, 2, p. 1 – 38. Vektoren sind Grössen, die einen Betrag sowie eine Richtung im Raum haben. Im Gegensatz zu den Vektoren bestehen Skalare nur aus einer Grösse als Zahl. In Büchern wird anstatt ~v oft v geschrieben. ~ Kraft F~ Beispiele: Geschwindigkeit ~v , El.-Feld E, Wählt man ein rechtwinkliges Koordinatensystem, so kann man die Komponenten eines Vektores ~v folgendermassen angeben: ~v = (vx , vy , vz ) (kartesische Komponenten). q Der Betrag von v ist: |~v | = vx2 + vy2 + vz2 . Statt die kartesischen Komponenten kann man auch den Betrag und die Richtung (2 Winkel!) angeben, siehe Kapitel 3.3.2. Der Vektor lebt unabhängig vom Koordinatensystem: Bei Drehung des Koordinatensystems ändern zwar die Komponenten, der Vektor ~v aber bleibt. 3.3.1 Rechenoperationen • Vektoraddition: ~a + ~b = ~c (3.18) c b a Subtraktion funktioniert analog. Im kartesischen Koordinatensystem addiert (subtrahiert) man komponentenweise: ax + bx = cx ay + by = cy az + bz = cz (3.19) • Multiplikation mit einer skalaren Grösse: ~c = α ~a (3.20) c a Komponentenschreibweise: cx = αax cy = αay 3.10 cz = αaz (3.21) 3.3.2 Polarkoordinatendarstellung Es gibt noch andere Möglichkeiten, einen Vektor in Komponenten zu zerlegen. Eine davon ist die Polarkoordinatendarstellung. Sie ist besonders in der axialsymmetrischen Anordnung nützlich, und wird z.B. bei Bewegungen von Teilchen in einem Zentralfeld verwendet. ~a = (ra , θ, ϕ) (3.22) Der Winkel θ heisst der Polarwinkel und liegt zwischen der z-Achse und dem Vektor. Der Winkel ϕ heisst der Azimuthwinkel, er beschreibt die Richtung der Projektion des Vektors auf die (x, y) Ebene. z a r θ y ϕ x Damit wird die Multiplikation mit einem Skalar: α ~a = (α ra , θ, ϕ) 3.3.3 (3.23) Einheitsvektor und Ortsvektor Die drei Einheitsvektoren haben die Länge 1 und stehen jeweils parallel zu den Achsen des kartesischen Koordinatensystems: e~1 = (1, 0, 0) e~2 = (0, 1, 0) e~3 = (0, 0, 1) (3.24) Man sagt, “die Einheitsvektoren spannen den Raum auf”. Jeder Vektor ~a kann dann folgendermassen geschrieben werden: ~a = ax e~1 + ay e~2 + az e~3 Die drei Zahlen ax , ay und az heissen die Komponenten des Vektors ~a. 3.11 (3.25) Insbesondere bezeichnet ~r den Ortsvektor: Sei ein Punkt P = (x, y, z) im Raum gegeben. Dann lautet der zugehörige Ortsvektor: ~r = xe~1 + y e~2 + z e~3 (3.26) x, y, z sind die Komponenten von ~r. Die Länge des Vektors ~r: |~r| ≡ r ergibt sich zu |~r| = r = q x2 + y 2 + z 2 (3.27) Mit Hilfe eine zeitabhängigen Ortsvektors ~r(t) beschreibt man die Bewegung z.B. eines Massenpunktes im Raum. B A Bahn r(t) r(t0) ~r enthält die Information über den Abstand zum Referenzpunkt: OA ≡ |~r| = Länge des Ortsvektors und die Richtung im Raum. ~r ist zeitabhängig. 0 3.3.4 Skalarprodukt (inneres Produkt) Im Gegensatz zu gewöhnlichen Zahlen gibt es bei Vektoren mehrere Möglichkeiten, ein Produkt zu definieren. Dafür ist die Division durch einen Vektor nicht definiert! Definition Skalarprodukt: c = ~a · ~b c = |~a||~b| cos θ (3.28) θ = 6 (~a, ~b) Das Skalarprodukt macht aus zwei Vektoren einen Skalar, also eine Zahl. a ϑ b Rechenregeln: • ~a · ~b = ~b · ~a • ~a · ~a = |~a|2 = ~a2 • ~a · (~b + ~c) = ~a · ~b + ~a · ~c 3.12 (3.29) Berechnen wir das Skalarprodukt in kartesischen Komponenten: ~a · ~b = (ax e~1 + ay e~2 + az e~3 ) · (bx e~1 + by e~2 + bz e~3 ) = ax bx + ay by + az bz (3.30) wegen e~i · e~i = e2i = 1 e~i · e~j = 0 und falls j 6= i (3.31) Anwendungen: • ~a · ~b = |a||bn |, wobei bn die Projektion von ~b auf ~a ist: bn = |~b| cos ϑ b ϑ a bn • Die Projektion eines Vektors auf die Einheitsvektoren ergibt die entsprechende Komponente: ~a · e~1 = ax (3.32) • Arbeit, die eine Kraft F~ entlang eines Weges s verrichtet: W = F~ · ~s ( ”Kraft mal Weg”). Wir zerlegen F~ in je einen Anteil parallel und senkrecht zum Weg ~s. F F s ϑ F Man nennt F~⊥ die Führungskraft und F~k ist die Projektion auf s: F~ = F~⊥ + F~k und W = F~ · ~s = F s cos(ϑ) = Fk s • Winkel zwischen zwei Vektoren: cos(ϑ) = ~a · ~b |~a||~b| (3.33) (3.34) • Abstand zwischen zwei Punkten A,B (den Endpunkten der Vektoren ~a und ~b: d = |~b − ~a| 3.13 (3.35) 3.3.5 Vektorprodukt (äusseres Produkt) Definition: ~c = ~a × ~b mit ~c⊥~a ~c⊥~b und |c| = ab sin(ϑ) (3.36) |c| ist also die von ~a und ~b eingeschlossene Fläche. Achtung: Rechte-Hand-Regel! (Mittelfinger) c (Zeigefinger) b θ a (Daumen) Regeln: • ~a × ~b = −(~b × ~a) • ~a × ~a = 0 • e~i × e~i = 0 • e~1 × e~2 = e~3 für i = 1 . . . 3 Indizes zyklisch vertauschbar • ~a × (~b + ~c) = ~a × ~b + ~a × ~c Kartesische Koordinaten: ~a × ~b = (ay bz − az by )e~1 + (az bx − ax bz )e~2 + (ax by − ay bx )e~3 3.4 3.4.1 (3.37) Bewegung in zwei und drei Dimensionen Differenzieren des Orts- und Geschwindigkeitsvektors Im dreidimensionalen Raum werden Ort und Geschwindigkeit als Vektoren dargestellt. Um die oben beschriebene eindimensionale Beschreibung der geradlinigen Bewegung auf beliebige Bewegungen im dreidimensionalen Raum zu verallgemeinern, stellt sich sofort die Frage: Wie leitet man einen Vektor ab? Vektoren sind ja eine spezielle Art von mehrwertigen Funktionen von mehreren Variablen. Hier betrachten wir Vektorfelder im engeren Sinne als eine dreiwertige Funktion ~a(x, y, z) die an 3.14 jedem Punkt im dreidimensionalen Raum definiert ist. Der Vektor soll ausserdem sich im Laufe der Zeit ändern können, es ist also ~a = ~a(x, y, z, t) (3.38) Wir schreiben den Vektor als Summe seiner Komponenten ax , ay , az und den kartesischen Einheitsvektoren e1 , e2 , e3 : ~a = ax e~1 + ay e~2 + az e~3 (3.39) Auf diese Formel können wir die Summen- und Produkteregel anwenden. Wir nehmen ausserdem an, dass die Einheitsvektoren fest im Raum stehen und sich nicht bewegen. Für die Ableitung nach der Zeit t wird also d~ ei /dt = 0 und somit ∂~a ∂ax ∂ay ∂az = e~1 + e~2 + e~3 ∂t ∂t ∂t ∂t (3.40) Wir schreiben partielle Ableitungen, weil der Vektor und damit die Komponenten ja nicht nur von der Zeit sondern auch vom Ort abhängen. Als spezielles Beispiel betrachten wir den Ortsvektor und seine Ableitungen: Bewegt sich ein Teilchen entlang einer beliebig verlaufenden Bahn im Raum, so markieren wir seine Position relativ zu einem Referenzpunkt durch den Ortsvektor ~r. B A Bahn r(t) ~r enthält die Information über den Abstand zum Referenzpunkt: OA ≡ |~r| = Länge des Ortsvektors und die Richtung im Raum. ~r ist zeitabhängig. r(t0) 0 Der Ortsvektor ist also zeitabhängig: ~r(t) = x(t) e~1 + y(t) e~2 + z(t) e~3 (3.41) Die Ableitung nach der Zeit des Ortsvektors ergibt die Geschwindigkeit ~v , zweimaliges Ableiten die Beschleunigung ~a: d~r(t) dx(t) dy(t) dz(t) = e~1 + e~2 + e~3 dt dt dt dt (3.42) d2~r(t) d2 x(t) d2 y(t) d2 z(t) = e ~ + e ~ + e~3 1 2 dt2 dt2 dt2 dt2 (3.43) ~v (t) = ~a(t) = Wir dürfen hier normale Ableitungen schreiben, da die Grössen jetzt alle nur von der Zeit abhängen! 3.15 3.4.2 Beispiele: Schuss, Sprung und Wurf In diesem Abschnitt betrachten wir die Bewegung eines Objekts während eines freien Falls. In vertikaler Richtung wird das Objekt durch die Anziehungskraft der Erde konstant nach unten beschleunigt, in horizontaler Richtung ist die Beschleunigung null während des Flugs oder des Falls, weil wir vom Luftwiderstand absehen wollen. y y0 ay = −g v0 ax = 0 (3.44) Am Anfang der Bewegung hat das Objekt die Geschwindigkeit ~v0 mit den Komponenten θ0 vx = v0 cos θ0 und vy = v0 sin θ0 (3.45) x Die Starthöhe zur Zeit t = 0 sei y0 . Der Einfachheit halber wählen wir den Ursprung der x−Achse am Startort: x0 = 0. Durch Anwendung der Formeln für die geradlinige Bewegung und den Spezialfall konstanter Beschleunigung erhalten wir: vy = v0 sin θ0 − gt g y = yo + v0 sin θ0 t − t2 2 vx = v0 cos θ0 x = v0 cos θ0 t (3.46) (3.47) Die Gleichung der Bahnkurve, die bekannte Wurfparabel, die die Flughöhe y in Funktion der Flugdistanz x angibt erhält man aus den obigen Beziehungen durch Eliminieren der Zeit: y = y0 + tan θ0 x − g x2 2v02 cos2 θ0 (3.48) Die maximale Höhe erreicht das Objekt, wenn vy = 0 gilt, also zur Zeit t = v0 sin θ0 /g: ymax − y0 = v02 sin2 θ0 2g (3.49) Da Steigzeit und Fallzeit gleich sind, erreicht das Objekt seine Ausgangshöhe wieder zur Zeit t = 2v0 sin θ0 /g und erreicht dort eine Weite: xmax = 2v02 sin θ0 cos θ0 v 2 sin 2θ0 = 0 g g (3.50) Aus der obigen Formel schliesst man, dass die Weite am grössten wird, wenn der Abflugwinkel θ0 = 45◦ beträgt, und dass man die gleiche Weite erreicht, wenn θ0 = α/2 bzw. θ0 = 90◦ − α/2 gewählt wird. Abbildung 3.9 zeigt uns den Geschwindigkeits- und den Beschleunigungsvektor an verschiedenen Stellen der Bahnkurve. Während ~a immer die gleiche Richtung und Grösse hat, ändert sich die Richtung und Grösse von ~v kontinuierlich. Die Komponente vx ist konstant, die Komponente vy ändert während des Fluges ihr Vorzeichen. 3.16 θ = 180° v θ 180° > θ > 90° v a 90° > θ > 0° θ = 90° θ = 0° v a θ θ v θ a a a v Abbildung 3.9: Richtung und Grösse des Geschwindigkeits- und des Beschleunigungsvektors an verschiedenen Punkten der Flugbahn. Beispiel: das Gürteltier: Das photographierte Tier von Abbildung 3.2 erreicht nach 0.2 s eine Höhe von 0.544 m. Wie lange ist es in der Luft und welche maximale Höhe erreicht es ? Wir nehmen an, das Tier springt senkrecht nach oben (θ0 = 90◦ ). Dann können wir aus y = v0 t − g2 t2 mit den gegebenen Zahlen v0 = 3.70 m/s ermitteln (g = 9.81 m/s2 ). Bei einer Zeit von t = v0 /g = 0.377 s erreicht das Tier seine maximale Höhe von v02 /(2g) = 0.698 m. Diese Befunde sind in der graphischen Darstellung von Abbildung 3.1 enthalten. 3.4.3 Bewegung entlang einer Kreisbahn Ein häufig in der Natur auftretender Spezialfall einer ebenen, zweidimensionalen Bewegung ist der, wo sich das Objekt auf einer Kreisbahn bewegt, denken wir z. B. an die Planetenbahnen, die meistens in guter Näherungen Kreise sind, das Verhalten von Fahrzeugen in Kurven, die von Skifahrern durchfahrenen Mulden oder überfahrenen Kuppen, und ähnliches mehr. 3.4.3.1 Konstante Schnelligkeit Konstante Schnelligkeit bedeutet |~v | = v = const., d. h. der Betrag der Geschwindigkeit ändert sich nicht, nur deren Richtung. Die Kreisbahn ist definiert durch den Ortsvektor ~r, mit dem Ursprung des Koordinatensystems im Zentrum des Kreises. Es gilt: r = |~r(t)| = konst (3.51) Aber ~r(t) ist natürlich nicht konstant, der Orstvektor dreht sich im Kreise herum, er ändert ständig seine Richtung. Ebenso ~v (t) = d~r/dt. Wir berechnen vorerst ~r · ~r = r2 = konst ⇒ dr2 =0 dt (3.52) Aber es gilt auch die Produkteregel: 0= d~r d~r dr2 = · ~r + ~r · = 2~v · ~r dt dt dt 3.17 (3.53) Dabei bedeuten die Punkte immer das Skalarprodukt. Damit haben wir bewiesen, das ~v ⊥ ~r, wie in der Skizze dargestellt: Die Richtung der Geschwindigkeit ist identisch mit der Richtung der Tangente an die Bahn, an den Kreis mit Radius r. v(t) r(t) Wie gross ist die Beschleunigung ~a = d~v /dt? Wir betrachten vorerst den Fall, wo der Betrag der Geschwindigkeit konstant ist, also v = |~v (t)| = konst (3.54) und wenden den analogen Trick wie oben an: ~v · ~v = v 2 = konst ⇒ dv 2 =0 dt (3.55) und wieder nach der Produkteregel 0= dv 2 d~v d~v = · ~v + ~v · = 2~a · ~v dt dt dt (3.56) Offenbar gilt ~a ⊥ ~v . Da wir uns in der Ebene bewegen muss demnach ~a und ~r parallel oder antiparallel sein. Wir berechnen nach der Produktregel 0= d(~v · ~r) d~v d~r = · ~r + ~v · = ~a · ~r + v 2 dt dt dt (3.57) Dividieren durch r und umsortieren ergibt ~a · ~r v2 =− r r (3.58) Das Skalarprodukt ~a · ~rr gibt die Komponente von ~a in Richtung ~r an. Die Beschleunigung zeigt also gegen den Mittelpunkt des Kreises (!), man nennt sie auch Zentripetalbeschleunigung. Sie hat den Betrag aN = v 2 /r. v(t) a(t) 3.18 Diese Beschleunigung heisst auch Zentripetalbeschleunigung. Der Index N deutet an, dass die Richtung der Zentripetalbeschleunigung senkrecht (normal) zur Bahn ist, der Name wurde von Isaac Newton geprägt: “centripetal” = “center seeking”. Die Komponente der Beschleunigung parallel zur Bahn heisst die Tangentialkomponente aT . Für die Kreisbahn mit konstanter Schnelligkeit gilt aT = 0 (3.59) Wir definieren: Umlaufzeit T = 2πr/v Frequenz f = 1/T = Anzahl Umdrehungen pro Sekunde Kreisfrequenz ω = 2πf = 2π/T = dφ/dt = Winkelgeschwindigkeit in rad pro Sekunde. 3.4.3.2 Variable Schnelligkeit Eine beliebig gekrümmte räumliche Bahn kann in einem gegebenen Punkt näherungsweise durch einen Kreisabschnitt ersetzt werden (Abbildung 3.10). Wenn dieser an die Bahn angepasste Krümmungskreis den Radius ρ hat, gilt aN = v2 ρ (3.60) ρ kann zeitabhängig sein. Bezeichnen wir mit vT und dvT die Tangentialkomponente der Geschwindigkeit und ihre Änderung, mit vN und dvN die entsprechenden Grössen für die Normalkomponente, so gilt für dφ → 0 dvT = d|~v | = Änderung der Länge von ~v dvN = |~v |dφ = vdφ und damit aT = dvT dv = dt dt aN = (3.61) dvN dφ =v dt dt (3.62) aN ρ=15m aN ρ=25m Abbildung 3.10: Zur Definition des Krümmungskreises für eine beliebige gekrümmte Bahn. Im allgemeinen Fall gilt d2 φ dω =ρ (3.63) 2 dt dt und es gilt - wie bei der Kreisbewegung mit konstanter Geschwindigkeit - auch im allgemeinen Fall: 2 dφ v2 aN = ρ = = ρω 2 (3.64) dt ρ aT = ρ 3.19