Kapitel 6 Relativbewegung, Inertialsysteme und die
Werbung

Kapitel 6
Relativbewegung,
Inertialsysteme und die
Relativitätstheorie
6.1
Relativbewegung
Im ersten Kapitel (Mechanik) haben wir gelernt, dass sowohl Ruhe wie Bewegung relative Begri↵e sind. Wenn ein Zug z.B. durch eine Station fährt,
befindet er sich relativ zur Station in Bewegung. Ein Passagier des Zuges kann
aber genau so gut sagen, dass sich die Station relativ zum Zug in Bewegung
befindet, und zwar in entgegengesetzter Richtung.
Wir schliessen daraus:
Die Bewegung muss immer relativ zu einem bestimmten Koordinatensystem
(oder Bezugssystem) definiert werden. Wir sagen, dass ein Bezugssystem vom
“Beobachter” gewählt wird.
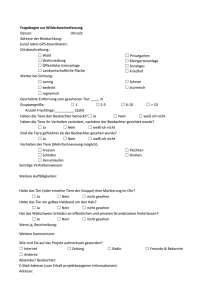
Der Beobachter befindet sich im Ursprung seines Bezugssystems. Seine Beobachtungen und seine Experimente werden relativ zu seinem Bezugssystem
durchgeführt. Siehe Abb. 6.1.
Am Beispiel des Zuges, der durch die Station fährt, haben wir zwei Beobachter
mit zwei verschiedenen Bezugssystemen betrachtet. Ein Beobachter, der sich
mit dem Zug bewegt, und ein zweiter, der sich in Ruhe in der Station befindet.
Da verschiedene Beobachter verschiedene Bezugssysteme verwenden, ist es
wichtig, zu wissen, wie Beobachtungen, die von verschiedenen Beobachtern gemacht werden, miteinander in Beziehung stehen.
193
194
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
y
ey
Beobachter
ex
Ursprung O
x
ez
z
Abbildung 6.1: Definition des Beobachters und seines Bezugssystems.
6.1.1
Transformation von einem Bezugssystem ins andere
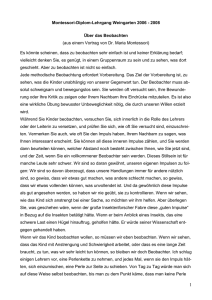
Wir betrachten zwei Beobachter O und O0 , die sich relativ zueinander bewegen.
Beide Beobachter O und O0 kennen die Gesetze der Mechanik und beobachten
dasselbe “Ereignis , z.B. die Bewegung eines Körpers entlang seiner Bahn.
”
Siehe Abb. 6.2.
Beobachter O und O0 messen die Bahnkurve des Körpers als Funktion der Zeit.
Sie benutzen identische Uhren, um die Zeiteinheit zu definieren. Beide Beobachter werden die Bahn relativ zu ihrem eigenen Koordinatensystem definieren.
Die Ortsvektoren als Funktion der Zeit werden bezeichnet als
O:0
O: r = r(t)
r 0 = r 0 (t0 )
(6.1)
Eine Bemerkung bezüglich der Zeit: Beide Beobachter benutzen identische
Uhren. Wir nehmen an, dass beide Uhren synchronisiert wurden, und deshalb
verwenden beide Beobachter die gleiche Zeit:
t = t0
(6.2)
Das scheint eine vernünftige Annahme zu sein (aber sie gilt nur, wenn die Zeit
unabhängig von der Bewegung des Beobachters ist. Siehe später.).
Wir leiten die Gleichungen der Transformation für den Ortsvektor und die Zeit
von einem Bezugssystem ins andere her:
⇢
⇢ 0 0
r(t) = R(t) + r 0 (t0 )
r (t ) = R(t) + r(t)
(6.3)
0
t = t
t0 = t
|
{z
}
|
{z
}
Übergang von O0 nach O
Übergang von O nach O
0
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
195
y0
e0y
y
ex
x
z0
ez
x0
e0z
R(t)
O
e0x
O0
ey
r 0 (t)
r(t)
z
Abbildung 6.2: Definition von zwei Beobachtern, die die Bewegung eines
Körpers messen. Wir nehmen an: t = t0 .
Für die Transformation der Geschwindigkeit von O0 nach O gilt
v(t) =
dr(t)
d
dR(t) dr 0 (t)
dR(t)
=
{R(t) + r 0 (t)} =
+
=
+ v0
dt
dt
dt
dt
dt
wobei
v0 =
dr 0 (t)
dr 0 (t0 )
=
dt
dt0
(6.4)
(6.5)
die Geschwindigkeit des Körpers gemessen relativ zum Beobachter O0 ist. Es
folgt, dass die Transformation der Geschwindigkeit gleich
v(t)
|{z}
=
a(t)
|{z}
=
dR(t)
+
dt
relativ zu O
v 0 (t)
|{z}
(6.6)
relativ zu O’
ist. Aus einer entsprechenden Herleitung folgt die Transformation der Beschleunigung:
relativ zu O
d2 R(t)
+
dt2
a0 (t)
|{z}
(6.7)
relativ zu O’
Im Allgemeinen folgt aus den Tranformationsgleichungen:
Verschiedene Beobachter, die sich relativ zueinander bewegen, messen verschiedene Geschwindigkeiten und Beschleunigungen.
196
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
6.2
Inertialsysteme
Das erste Newtonsche Gesetz (Trägheitsprinzip) sagt, dass ein Körper in Ruhe
bleibt oder sich mit konstanter Geschwindigkeit bewegt, wenn keine resultierende Kraft auf ihn wirkt. D.h., dass die Beschleunigung des Körpers gleich
null ist, wenn die resultierende Kraft, die auf den Körper wirkt, verschwindet.
Im Allgemeinen werden zwei Beobachter nicht dieselbe Beschleunigung beobachten, d.h.
a(t)
|{z}
=
relativ zu O
d2 R(t)
+ a0 (t)
|{z}
dt2
relativ zu O’
Wir bemerken:
)
a(t)
|{z}
6=
relativ zu O
a0 (t)
|{z}
für
d2 R(t)
6= 0
dt2
relativ zu O’
(6.8)
Wenn die zwei Beobachter eine unterschiedliche Beschleunigung messen, kann
das zweite Newtonsche Gesetz nicht für beide Beobachter gelten (wenn sie beide
dieselbe Kraft messen)!
Im Fall, dass die auf den Körper wirkende resultierende Kraft verschwindet,
muss die gemessene Beschleunigung gleich null sein. Aber wenn
d2 R(t)
6= 0
(6.9)
dt2
gilt, kann die Beschleunigung nicht gleichzeitig für beide Beobachter verschwinden. Wir haben damit bewiesen, dass die Newtonschen Gesetze nicht in allen
Bezugssystemen gelten!
Ein Bezugssystem, in dem die Newtonschen Gesetze gelten, heisst
Inertialsystem.
Damit die Beschleunigung in O und O0 gleich ist, muss die relative Beschleunigung der Beobachter verschwinden:
a(t)
|{z}
relativ zu O
=
a0 (t)
|{z}
für
d2 R(t)
=0
dt2
=)
dR(t)
= Konst.
dt
(6.10)
relativ zu O’
Wir schliessen daraus:
Verschiedene Inertialsysteme bewegen sich relativ zueinander mit konstanter
Geschwindigkeit.
6.3
6.3.1
Beschleunigte Bezugssysteme und Scheinkräfte
Definition der Scheinkraft
Welches Ergebnis bekommen wir, wenn wir die Beschleunigung eines Körpers
relativ zu einem Bezugssystem O0 messen, das sich relativ zu einem Inertialsys-
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
197
tem O beschleunigt wird ?
In diesem Fall stimmt im beschleunigten Bezugssystem die resultierende Kraft,
die auf den Körper wirkt, nicht mit dem Produkt der Masse und der gemessenen
Beschleunigung überein (Siehe Gl. 6.7):
Inertialsystem O :
F = ma
⇣
Bezugssystem O0 : F =
6 ma0 = m a
d2 R(t)
dt2
⌘
(6.11)
Wenn wir das zweite Newtonsche Gesetz in einem beschleunigten Bezugssystem
anwenden wollen, müssen wir fiktive Kräfte (oder Scheinkräfte) einführen.
Diese fiktiven Kräfte werden nicht wirklich wirken. Sie dienen als Hilfsmittel,
damit die Beziehung F 0 = ma0 auch für Beschleunigungen gilt, die relativ zum
Nicht-Inertialsystem gemessen werden. Aus der Gl. 6.11 finden wir:
F 0 = ma0 = ma
m
d2 R(t)
d2 R(t)
0
=)
F
=
F
+
m
dt2
dt2 }
| {z
(6.12)
Scheinkraft
6.3.2
Rotierendes Bezugssystem
Wir betrachten eine um eine feste Drehachse rotierende Scheibe, auf der ein
Körper sitzt. Die Drehung der Scheibe um die Drehachse wird mit Hilfe des
Drehwinkels beschrieben. Wir nehmen an, dass die Winkelgeschwindigkeit
der Scheibe, die durch ! = d /dt gegeben ist, konstant ist:
! = Konst. =) (t) = !t
(6.13)
Jeder Punkt auf der Scheibe bewegt sich auf einer Kreisbahn und wird deshalb
beschleunigt. Ein Bezugssystem O0 , das mit der Scheibe verbunden ist, ist
daher kein Inertialsystem!
Für einen Beobachter in einem Inertialsystem O dreht sich der bezüglich O’
ruhende Körper mit einer Geschwindigkeit v im Kreis und wird deshalb zum
Kreiszentrum beschleunigt.
Wir verwenden die Polarkoordinaten (r, ') bezüglich O mit Einheitvektoren er
und e . Für den (sich drehenden) Beobachter O’ sind die Koordinaten (r0 , '0 )
mit Einheitvektoren e0r und e0 . Es gilt für die Transformation von O nach O’:
⇢
r0 = r
'0 = '
!t
8
dr0
dr
>
>
=
<
dt
dt
=)
0
>
>
: d' = d'
dt
dt
!
8 2 0
dr
d2 r
>
>
=
<
dt2
dt2
=)
2 0
2
>
>
: d' =d'
dt2
dt2
(6.14)
198
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Im Kap. 2 haben wir die Beschleunigung in Polarkoordinaten hergeleitet (Siehe
Gl. 2.55). Für den Inertialbeobachter gilt:
(
✓ ◆2 )
⇢
d2 r
d'
dr d'
d2 '
F = ma = m
r
e
+
m
2
+
r
e'
r
dt2
dt
dt dt
dt2
(
✓ 0
◆2 )
⇢
✓
◆
2 0
d2 r 0
d'
dr0 d'0
0
0d '
= m
r
+
!
e
+
m
2
+
!
+
r
e'
r
dt2
dt
dt
dt
dt2
(6.15)
Die Zentrifugalkraft:
Wenn der Körper relativ zum sich drehenden Beobachter O’ in Ruhe ist, gilt:
dr0
d2 r 0
= 2 = 0;
dt
dt
d'0
d 2 '0
=
=0
dt
dt2
(6.16)
und wir finden:
F ZF = m (r0 ! 2 ) er
(6.17)
Der Körper spürt eine fiktive nach aussen gerichtete Kraft, die als Zentrifugalkraft bezeichnet wird.
Die Corioliskraft:
Wenn der Körper sich auf der Scheibe radial nach innen oder nach aussen mit
einer konstanten Geschwindigkeit v 0 bewegt, dann gilt:
dr0
= v0;
dt
d2 r 0
= 0;
dt2
d'0
d 2 '0
=
=0
dt
dt2
(6.18)
und wir finden die resultierende (Schein)kraft:
F ZF + F C = m (r0 ! 2 ) er + m (2v 0 !) e'
(6.19)
Der zweite Term F C entspricht der Corioliskraft, die senkrecht zur radialen
Geschwindigkeit wirkt. Sie führt zu einer seitlichen Ablenkung des Körpers!
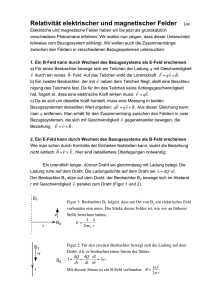
Demonstrationsexperiment: Schuss auf Drehstuhl
Dieses Experiment zeigt qualitativ die Wirkung der Corioliskraft. Ein Operateur sitzt auf dem Drehstuhl. Zur Verfügung stehen eine Pistole und drei
Pfeile. Der Operateur löst die Pistole aus. Die Flugbahn des Projektils verläuft
geradlinig und erreicht die Zielscheibe.
Falls sich der Drehstuhl dreht, verläuft die Flugbahn relativ zum Operateur,
der sich dreht, gekrümmt. Der Operateur interpretiert die Bewegung mit Hilfe
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
199
Abbildung 6.3: Schuss auf Drehstuhl.
der Corioliskraft, die seitlich wirkt. Wenn sich der Stuhl nach rechts dreht,
wird das Projektil nach links abgelenkt. Wenn er sich nach links dreht, wird
das Projektil nach rechts abgelenkt.
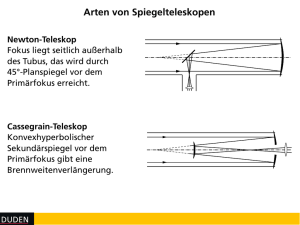
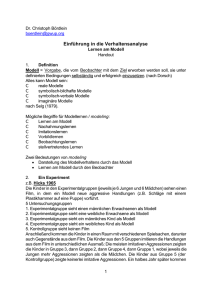
Demonstrationsexperiment: Rollende Kugel auf Brett
Das Experiment zeigt die Wirkung der Corioliskraft auf eine auf einem Brett
rollende Kugel. Auf einem Holzbrett ist ein Blatt Packpapier befestigt, das mit
Kohlepapier überdeckt ist. Ein Operateur dreht sich mit einem Stuhl mit der
Winkelgeschwindigkeit !. Er lässt eine Kugel der Masse m auf das Brett fallen.
Die Bewegung der Kugel wird als Kohlespur auf dem Papier festgehalten. Der
Operateur wird die folgenden beiden Versuche durchführen (Siehe Abb. 6.4):
1. Mitrotierende Platte: Messung im beschleunigten Bezugssystem.
Die Kugel beschreibt eine gekrümmte Bahn. Im Punkt wo die Kugel
losgelassen wird, ist ihre Geschwindigkeit gleich Null und sie spürt nur
die Zentrifugalkraft. Ihre Geschwindigkeit nimmt radial zu. Da die Geschwindigkeit der Kugel zunimmt, nimmt der Betrag der zur Bewegung
senkrechten Corioliskraft auch zu. Die Bahnkurve wird gekrümmt.
2. Raumfeste Platte: Messung im Inertialsystem.
Der Operateur rotiert und lässt die Kugel los. Im Augenblick des Loslassens verschwindet die Kraft auf die Kugel. Die Kugel bewegt sich geradlinig und gleichförmig, d.h. kräftefrei.
6.3.3
Die Erde als ein Nicht-Inertialbezugssystem
Die Erde dreht sich um ihre Achse mit einer Periode T von 1 Sterntag =
8,616⇥104 Sekunden. Als Folge dieser Rotationsbewegung bewegen sich alle
V01080701
Corioliskraft (Rollende Kugel auf Brett)
200
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
v 0 F ZF
P2
FC
F ZF
P1
P2
v
P1
Abbildung 2: Rollende Kugel. Linkes Bild: Mitrotierende Platte (Beschleunigtes System). RechAbbildung
6.4: Rollende Kugel. Linkes Bild: Mitrotierende Platte (Beschleutes Bild: Raumfeste Platte (Inertialsystem).
nigtes System). Rechtes Bild: Raumfeste Platte (Inertialsystem).
Punkte auf der Erdoberfläche in gleichförmiger Kreisbewegung mit einer Winkelgeschwindigkeit
!=
2⇡
= 7, 292 ⇥ 10
T
5
rad/s.
(6.20)
Eine Zentrifugalkraft und eine Corioliskraft treten aufgrund der Erddrehung in
allen Bezugssystemen auf, die mit der Erde verbunden sind. Ein Bezugssystem,
das feste Koordinaten relativ zur Erdoberfläche besitzt, ist kein Inertialsystem!
Zentrifugalkraft auf der Erdoberfläche: Sie ist klein im Vergleich zur Gravitationskraft. Die e↵ektive Erdbeschleunigung, die man spürt, beträgt am
Nordpol 9, 8321 m/s2 . Am Äquator ist sie 9, 7799 m/s2 wegen der maximalen Wirkung der Zentrifugalkraft, die vom Breitengrad abhängt. Bei unserem
Breitengrad von ung. 45o ist sie 9, 8094 m/s2 .
Physikdepartement ETH Zürich
Coriolise↵ekt auf der Erde: Wenn sich ein Körper in einer horizontalen
2 die Corioliskraft auf der nördlichen
Ebene auf der Erdoberfläche bewegt, führt
Hemisphäre zu einer leichten Rechtsabweichung der Bahn und zu einer Linksabweichung auf der südlichen Hemisphäre. Diese Kräfte sind vor allem für das
Verständnis des Wetters von grosser Bedeutung.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
6.4
201
Die Galileische Transformation
6.4.1
Vektorielle Darstellung
Wir betrachten zwei Beobachter O und O0 , die sich relativ zueinander mit
konstanter Geschwindigkeit V bewegen. Weil die zwei Beobachter sich
relativ zueinander mit konstanter Geschwindigkeit bewegen, gilt (siehe Abb.
6.5):
R(t) = V t
(6.21)
Diese Transformation wird als Galileitransformation bezeichnet:
r 0 (t0 ) = r(t)
Vt
(6.22)
Die Beziehung zwischen der Geschwindigkeit und der Beschleunigung, die beide
Beobachter messen, kann leicht gefunden werden:
dr 0 (t0 )
d {r(t) V t}
dr(t)
v (t ) =
=
=
0
dt
dt
dt
0
0
V = v(t)
V ,
(6.23)
d.h., die Galileische Transformation für die Geschwindigkeit lautet:
v0 = v
V
(6.24)
Diese Gleichung führt auf die gewöhnliche Vektoraddition der Geschwindigkeiten. Dieser Begri↵ ist uns aus dem Alltag vertraut. Für die Beschleunigung
gilt:
dv 0 (t0 )
d {v(t) V }
dv(t) dV
a0 (t0 ) =
=
=
= a(t)
(6.25)
0
dt
dt
dt
dt
Beide Beobachter messen dieselbe Beschleunigung. Wir sagen, dass die Beschleunigung eine Invariante der Galileischen Transformation ist. Damit ergibt sich das folgende Gesetz:
Alle Bezugssysteme, die über die Galileische Transformation eines Inertialsystems gefunden werden, sind ebenfalls Inertialsysteme.
6.4.2
Komponentendarstellung
Da der Geschwindigkeitsvektor V konstant ist, können wir die Koordinatensysteme so wählen, dass sich der Beobachter O0 in positiver Richtung der x-Achse
des Bezugssystems O bewegt. Wir betrachten zusätzlich den Fall, in dem die
Ursprünge der Bezugssysteme O und O0 zu den Zeiten t = t0 = 0 zusammenfallen und die Koordinatenachsen immer parallel bleiben, da keine relative
202
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
y
y0
Vt
e0y
ey
O
ex
e0x
x,x0
e0z
ez
z
O’
z0
Abbildung 6.5: Beobachter O und O0 mit der konstanten Relativgeschwindigkeit V .
Rotation stattfindet. Siehe Abb. 6.5. In diesem Fall wird die Geschwindigkeit
geschrieben als
V = V ex = (V, 0, 0)
(6.26)
Die Ortsvektoren können als Funktion ihrer Komponenten ausgedrückt werden:
r = (x, y, z) und r 0 = (x0 , y 0 , z 0 )
(6.27)
Der Übergang von einem Bezugssystem ins andere wird mit Hilfe der Galileischen Transformation geschrieben. Für den Übergang von O nach O0 gilt das
folgende Gleichungssystem:
8 0
x =x Vt
>
>
< 0
y =y
Galileische Transformation
(6.28)
z0 = z
>
>
: 0
t =t
Die inverse Transformation von O0 nach O kann leicht aus der Tatsache hergeleitet werden, dass sich O bezüglich O0 mit derselben Geschwindigkeit V in
die entgegengesetzte Richtung bewegt. Es folgt daraus, dass für den Übergang
von O0 nach O das folgende Gleichungssystem gilt:
8
x = x0 + V t
>
>
<
y = y0
inverse Galileische Transformation
(6.29)
z = z0
>
>
:
t = t0
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
6.5
203
Das Ereignis
Wir definieren ein Ereignis als etwas, das an einem bestimmten Punkt des
Raums und zu einer bestimmten Zeit stattfindet. D.h., ein Ereignis findet in einem Punkt mit bestimmten Raumkoordinaten x, y, z und zu einer bestimmten
Zeit t statt. Der Zusammenstoss zwischen zwei Körpern ist z.B. ein Ereignis.
Ein anderes Ereignis besteht darin, dass eine Lampe einen Lichtblitz emittiert.
Ein drittes Ereignis ist der Aufprall eines Steines, durch den die Windschutzscheibe eines Autos beschädigt wird.
Jedes Ereignis ist eine reale Gegebenheit.
Man sagt, dass ein Ereignis an einer bestimmten Stelle in der Raumzeit stattfindet. Ein dreidimensionaler Ortsvektor stellt einen Punkt im Raum dar:
r = (x, y, z)
(6.30)
Ein Ereignis wird mit einem vierdimensionalen 4-Vektor (Vierervektor) in
der Raumzeit dargestellt:
(t, x, y, z) ⌘ ein bestimmter Punkt in der Raumzeit
(6.31)
Wir sagen:
Ein Ereignis entspricht einem Punkt in der vierdimensionalen Raumzeit.
Wir bemerken, dass die erste Komponente (d.h., die Zeit) und die anderen drei
Komponenten (d.h. die Raumkoordinaten) des 4-Vektors verschieden sind.
Wir können die Zeit auch mit der Einheit der Länge messen.
Wir lassen z.B. einen Lichtstrahl zwischen zwei parallelen Spiegeln, die 0,5 m
voneinander entfernt sind, hin und her laufen. Eine solche Anordnung können
wir als eine Uhr“ verwenden, die jedesmal tickt“, wenn der Strahl zu einem
”
”
bestimmten Spiegel zurückkehrt. Damit alle Komponenten des 4-Vektors dieselbe Einheit besitzen, definieren wir die erste Komponente (d.h., die Zeitkomponente) als das Produkt der Zeit t (in Sekunden) mal der Lichtgeschwindigkeit
c (in Meter/Sekunde) und erhalten ct (in Meter).
Wir benutzen die Lichtgeschwindigkeit, weil sie die einzige fundamentale Konstante in der Natur ist, die die nötige Einheit zur Umwandlung einer Zeit in
eine Länge hat.
Der Raumzeit-4-Vektor wird dann geschrieben als xµ (µ = 0, 1, 2, 3)
xµ ⌘ (ct, x, y, z)
(6.32)
wobei der Index µ über die 4 Komponenten des Vektors läuft. Mit dieser Definition besitzen die vier Komponenten des 4-Vektors dieselbe Einheit, d.h. die
204
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Einheit einer Länge (z.B. Meter). In ähnlicher Weise (wir nehmen an, dass die
fundamentale Konstante c dieselbe für beide Beobachter ist!):
x0µ = (ct0 , x0 , y 0 , z 0 )
(6.33)
Beide, xµ und x0µ , entsprechen demselben Ereignis, aber von verschiedenen Beobachtern O und O0 beobachtet. Für die Galileische Transformation des Vierervektors xµ von O nach O0 gilt das folgende Gleichungssystem
(Siehe Gl. 6.28):
8 0
x
>
>
< 0
y
> z0
>
: 0
ct
=x
=y
=z
= ct
ct
Galileische Transformation
(6.34)
Dabei haben wir den Geschwindigkeitsparameter (Siehe Kap. 4.2.2) verwendet, = V /c wobei V die Geschwindigkeit des Beobachters O0 relativ zu O
und c die Lichtgeschwindigkeit ist. Diese Transformation wird in Matrix-Form
folgendermassen ausgedrückt:
0
B
B
@
|
ct0
x0
y0
z0
{z
x0µ
1
0
1
C B
C=B
A @ 0
0
} |
0
1
0
0
{z
0
0
1
0
0
1
0
0
0
0
1
0
MG ( )
10
0
ct
C
B
0 CB x
0 A@ y
1
z
} | {z
1
10 0
0
ct
C
B
0 C B x0
0 A @ y0
1
z0
| {z
1
xµ
C
C
A
(6.35)
}
Die inverse Galileische Transformation (Gl. 6.29) von O0 nach O lautet:
0
B
B
@
|
ct
x
y
z
{z
xµ
1
0
1
C B +
C=B
A @ 0
0
}
x0µ
C
C
A
(6.36)
}
Die Galileische Transformationen können dann als die Transformation der 4Vektoren
x0µ = MG ( )xµ
und xµ = MG (
)x0µ
(6.37)
ausgedrückt werden. MG ist die 4⇥4-Matrix, die die Galileische Transformation
darstellt.
Im Allgemeinen haben wir mit dieser Form angenommen, dass verschiedene
Beobachter dasselbe Ereignis mit verschiedenen Raumkoordinaten und Zeiten
beschreiben.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
6.6
205
Bestimmung der Ausbreitungsgeschwindigkeit einer Welle
Wir betrachten die Ausbreitungsgeschwindigkeit einer longitudinalen Federwelle, die sich von links nach rechts ausbreitet. Siehe Abb. 6.6. Um die Ausbreitungsgeschwindigkeit zu bestimmen, messen wir die Zeit, die die Welle
benötigt, um einen Stab zu passieren.
x
xµ1 = (ct1 , x1 )
xµ2 = (ct2 , x2 )
Abbildung 6.6: Messung der Ausbreitungsgeschwindigkeit einer longitudinalen
Federwelle, die sich von links nach rechts ausbreitet. Die Zeit, die die Welle
benötigt, um den Stab zu passieren, wird gemessen. Beide Beobachter sind
relativ zur Feder in Ruhe.
Beobachter in Ruhe. Wir beginnen mit dem Fall, in dem der Beobachter
relativ zur Feder in Ruhe ist. Wir definieren zwei Ereignisse, xµ1 und xµ2 :
( µ
x1 = (ct1 , x1 , y1 , z1 ) : Wellenberg tri↵t am Stab ein
(6.38)
xµ2 = (ct2 , x2 , y2 , z2 ) : Wellenberg verlässt den Stab
Die gemessene Ausbreitungsgeschwindigkeit vA wird bestimmt mit Hilfe der
Raumzeitkoordinaten der zwei Ereignisse xµ1 = (ct1 , x1 , y1 , z1 ) und xµ2 =
(ct2 , x2 , y2 , z2 ) als (in diesem Fall sind nur die Zeit und die x- Koordinate wichtig):
x2 x1
x2 x1
vA =
=c
(6.39)
t2 t1
ct2 ct1
Bewegter Beobachter. Wir betrachten nun den Fall, in dem der Beobachter
O0 sich relativ zur Feder mit konstanter Geschwindigkeit V (d.h., mit einem
Geschwindigkeitsparameter = V /c) bewegt. Siehe Abb. 6.7.
Die Ausbreitungsgeschwindigkeit der Welle, gemessen bezüglich O0 , kann mit
Hilfe einer Galileischen Transformation der Raumzeitkoordinaten bezüglich O
206
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
x
xµ1 = (ct1 , x1 )
xµ2 = (ct2 , x2 )
x0 µ1 = (ct01 , x01 )
x0 µ2 = (ct02 , x02 )
V
Beobachter O0
Beobachter O
Abbildung 6.7: Messung der Ausbreitungsgeschwindigkeit einer longitudinalen
Federwelle, die sich von links nach rechts ausbreitet. In diesem Fall bewegt sich
der Beobachter relativ zur Feder nach rechts.
berechnet werden. Wir benutzen die Koordinaten der zwei Ereignisse bezüglich
O und O0 . Die Ortskoordinaten xµ1 und x0 µ1 entsprechen demselben Ereignis,
aber bezüglich den zwei Bezugssystemen der zwei Beobachter O und O0 . Eine
ähnliche Beziehung gilt zwischen xµ2 und x0 µ2 . Die Ausbreitungsgeschwindigkeit
vA0 bezüglich O0 ist gleich
x02
t02
x2
=
t2
= vA
vA0 =
x01
(x2
ct2 )
=
0
t1
t2
x1
c (t2 t1 )
t1
t2 t1
V,
(x1
t1
ct1 )
(6.40)
wobei wir die gemessene Grösse vA0 bezüglich O0 als Funktion der bezüglich O
gemessenen Grössen ausgedrückt haben. Wenn sich demnach der Beobachter
O0 in dieselbe Richtung wie die Welle bewegt, schliesst er, dass sich die Welle
mit der geringeren Geschwindigkeit vA0 = vA V ausbreitet.
Mit einer ähnlichen Herleitung kann man beweisen, dass sich die Welle für den
Beobachter O0 mit der grösseren Geschwindigkeit vA0 = vA +V ausbreitet, wenn
er sich entgegengesetzt zur Welle bewegt. Siehe Abb. 6.8.
Daraus folgt, dass
die beobachtete Ausbreitungsgeschwindigkeit der Welle von der Geschwindigkeit der Beobachter relativ zum Medium abhängt, durch welches sich die Welle
ausbreitet. Sie ist gleich vA V , wenn sich der Beobachter in dieselbe Richtung
wie die Welle bewegt und gleich vA + V , wenn er sich entgegengesetzt zur Welle
bewegt.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
207
x
xµ1 = (ct1 , x1 )
xµ2 = (ct2 , x2 )
x0 µ1 = (ct01 , x01 )
x0 µ2 = (ct02 , x02 )
V
Beobachter O0
Beobachter O
Abbildung 6.8: Messung der Ausbreitungsgeschwindigkeit einer longitudinalen
Federwelle, die sich von links nach rechts ausbreitet. In diesem Fall bewegt sich
der Beobachter relativ zur Feder nach links.
6.7
Bestimmung der Lichtgeschwindigkeit
Die Lichtgeschwindigkeit kann mit Hilfe eines Laserpulses gemessen werden.
Wie früher messen wir die Zeit, die der Laserpuls benötigt, um einen Stab zu
passieren. Siehe Abb. 6.9.
Wir definieren die zwei Ereignisse
( µ
x1 = (ct1 , x1 , y1 , z1 ) : Licht passiert den 1. Empfänger
xµ2 = (ct2 , x2 , y2 , z2 ) : Licht passiert den 2. Empfänger
(6.41)
In diesem Fall wird die Lichtgeschwindigkeit c gemessen als
c=
x2
t2
x1
t1
(6.42)
Wir bemerken nun, dass die Ausbreitung des Lichtes sich von der Ausbreitung
mechanischer Wellen unterscheidet:
Alle mechanischen Wellen benötigen ein Medium, um sich ausbreiten zu
können, und die Geschwindigkeit der Wellen wird durch die Eigenschaften des
Mediums bestimmt.
Seit dem 19. Jahrhundert wusste man, dass das Licht sich wie Lichtwellen
(elektromagnetische Wellen) verhält, durch die Beobachtung von Phänomenen wie optische Interferenz, Beugung und Polarisationse↵ekten.
208
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Laserpuls
Laser
Abbildung 6.9: Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um den Stab zu passieren, wird gemessen.
Lichtwellen können sich aber durch den leeren Raum (d.h., durch das Vakuum) ausbreiten. Sie benötigen dazu kein Medium, durch welches sie sich
ausbreiten müssen.
Nach der Maxwellschen1 Theorie des Elektromagnetismus (Siehe Kap.
8) ist die Ausbreitungsgeschwindigkeit von elektromagnetischen Wellen gleich
c= p
1
⇡ 3 · 108 m/s ,
" 0 µ0
(6.43)
wobei "0 die Dielektrizitäts- und µ0 die Permeabilitätskonstante im Vakuum
ist.
Die Maxwellschen Gleichungen liefern aber keine Aussage darüber, in welchem
Bezugssystem die Lichtgeschwindigkeit diesen Wert annimmt!
Eine Messung der Lichtgeschwindigkeit in einem sich bewegenden Bezugssystem, müsste ein grösseres oder kleineres Ergebnis liefern, je nach Richtung der
Bewegung relativ zum Lichtstrahl. Siehe dazu Abbn. 6.10 und 6.11.
6.7.1
Das Michelson-Morley Experiment
Im Jahr 1881 begann Michelson, die Lichtgeschwindigkeit mit Hilfe von Laufzeitmessungen des Lichts zu messen. In einer Serie von Experimenten versuchten Michelson und Morley die Abhängigkeit der Lichtgeschwindigkeit vom
1
James C. Maxwell (1831-1879).
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
209
Laserpuls
Laser
V
Abbildung 6.10: Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um den Stab zu passieren, wird gemessen. Der Beobachter, der den
Stab hält, bewegt sich in Richtung des Beobachters, der den Laser hält.
Laserpuls
Laser
V
Abbildung 6.11: Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um den Stab zu passieren, wird gemessen. Der Beobachter, der den
Stab hält, entfernt sich vom Beobachter, der den Laser hält.
210
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Abbildung 6.12: Das Michelson-Morley-Interferometer.
Bewegungszustand des Bezugssystems aufzudecken. Sie benutzten die Erde
als bewegtes Bezugssystem: die Erde bewegt sich mit einer Geschwindigkeit
von ungefähr 30 km/s um die Sonne. Sie verglichen die Zeiten, die das Licht
benötigt, um dieselbe Strecke parallel und senkrecht zur Bewegungsrichtung
der Erde zurückzulegen. Siehe Abb. 6.12.
Wir betrachten z.B. die Lichtstrahlen, die sich parallel zur Richtung der Erde
bewegen. Die Lichtstrahlen wurden zwischen nahezu parallelen Spiegeln hin
und her reflektiert. Wenn sich Lichtquelle und Spiegel mit einer Geschwindigkeit V in gleicher Richtung bewegen, dann sollte sich das Licht mit der
Geschwindigkeit c–V auf den Spiegel zubewegen und mit der Geschwindigkeit
c + V von ihm wegbewegen. Siehe Abb. 6.13.
Die gesamte Laufzeit des Lichts ist daher
t=
L
c
V
+
L
L(c + V ) + L(c
=
c+V
c2 V 2
V)
=
c2
2Lc
(1 V 2 /c2 )
(6.44)
Für V ⇡ 3 · 104 m/s ⌧ c ⇡ 3 · 108 m/s gilt:
2L
t=
c
✓
1
V2
c2
◆
1
2L
⇡
c
✓
V2
1+ 2
c
◆
,
(6.45)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
211
L
c
V
V
Spiegel
Lichtstrahl
c+V
Abbildung 6.13: Eine Lichtquelle und ein Spiegel, die sich mit konstanter Geschwindigkeit V bewegen.
wobei
V2
2
⇡ 10 4 = 10 8
(6.46)
2
c
Der E↵ekt ist sehr klein und daher auf direktem Weg sehr schwer nachzuweisen.
Um diese kleine Di↵erenz zu bestimmen, verwendeten Michelson und Morley
ein Interferometer.
Wie in Abb. 6.12 gezeigt, fällt das Licht auf einen Strahlteiler. Ein Teil des
Lichts geht in die Richtung parallel zur Erdbewegung und ein anderer Teil wird
um 90 reflektiert. Die beiden Teile werden reflektiert und tre↵en schliesslich
wieder zusammen.
Wegen des Prinzips der Superposition (siehe Kap. 5.6) der elektromagnetischen
Wellen wird die resultierende Welle die Summe der einlaufenden Wellen sein.
Wenn beide Strecken (d.h., parallel und senkrecht) zu einer Laufzeitdi↵erenz
führen, werden wir es durch Interferenzphänomene (siehe Kap. 5.6.1) zwischen den beiden Lichtstrahlen bemerken.
Die Anwesenheit einer solchen Laufzeitdi↵erenz wollten Michelson und Morley
mit der Änderung des Interferenzmusters bei einer Drehung des Experiments
um 90 beweisen.
Bei seinem ersten Versuch im Jahr 1881 hat Michelson keinen E↵ekt beobachtet. Er wiederholte seine Messungen nach einem halben Jahr, da sich die Erde
auf ihrer Bahn um die Sonne in die entgegengesetzte Richtung bewegt, aber mit
demselben Ergebnis.
Dieses Experiment wurde unter verschiedenen Bedingungen wiederholt, aber
das Ergebnis war immer dasselbe: Es wurde keine Änderung des Interferenzmusters beobachtet!!
6.7.2
Das Postulat der konstanten Lichtgeschwindigkeit
Das Null-Resultat des Michelson-Morley-Experiments kann mit Hilfe des Postulats der Lichtgeschwindigkeit erklärt werden. Es besagt:
212
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Jeder Beobachter misst in allen Richtungen für die Lichtgeschwindigkeit im
Vakuum denselben Wert c.
D.h., die Lichtgeschwindigkeit ist isotrop (gleich gross in alle Richtungen) und
unabhängig von der Bewegung des Beobachters.
Dieses Postulat scheint vielleicht im Widerspruch zu unserer Anschauung zu
stehen. Wir betrachten z.B. zwei Beobachter O1 und O2 und eine Lichtquelle
S. O1 befindet sich relativ zu S in Ruhe, und O2 bewegt sich mit der Geschwindigkeit V auf S zu. Siehe Abb. 6.14. Beobachter O1 misst eine Lichtgeschwindigkeit c. Beobachter O2 misst auch eine Lichtgeschwindigkeit c und
nicht etwa c + V !
Wir bemerken, dass die Lichtgeschwindigkeit c eine fundamentale Grösse der
Natur ist. Sie wirkt als eine Grenzgeschwindigkeit, die der grösstmöglichen Geschwindigkeit entspricht (Siehe Kap. 4.2.1). Eine vernünftige Annahme ist, dass
diese fundamentale Grösse c dieselbe für alle Beobachter sein muss, unabhängig
von ihrem Bewegungszustand.
O1
Lichtquelle S
V
O2
Abbildung 6.14: Eine ruhende Lichtquelle S, ein ruhender Beobachter O1 und
ein sich mit der Geschwindigkeit V in Richtung der Quelle bewegender Beobachter O2 .
6.8
Die Lorentz-Transformation
Das Postulat der konstanten Lichtgeschwindigkeit ist im Widerspruch zur Vektoraddition der Geschwindigkeit, die eine Folgerung der Galileischen Transformation ist. Es folgt:
Die Galileische Transformation entspricht einer Näherung, die nur gilt, wenn
die Geschwindigkeiten viel kleiner als die Lichtgeschwindigkeit sind.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
213
Wir suchen eine neue Transformation. Wir nehmen an, dass die Galileische
Transformationsgleichung für x bis auf einen Faktor K gilt (Siehe Gl. 6.34):
x0 = K (x
ct) .
(6.47)
wobei K von V und c (d.h., vom Geschwindigkeitsparameter ) abhängen kann,
aber nicht von den Koordinaten. Die inverse Transformation ist dann
x = K (x0 + ct0 ) ,
(6.48)
Wir betrachten einen Lichtpuls, der im Ursprung vom Beobachter O zur Zeit
t = 0 emittiert wird und sich in die x-Richtung ausbreitet. Wir nehmen gewöhnlich an, dass die Ursprünge von O und O0 für t = t0 = 0 zusammenfallen. Es
folgt, dass der Lichtpuls auch in O0 zum Zeitpunkt t0 = 0 startet.
Nach dem Postulat der Konstanz der Lichtgeschwindigkeit muss die Gleichung
für die x-Komponente des Lichtpulses in O und O0 gleich lauten:
bezüglich O :
bezüglich O0 :
Wir erhalten:
(
x = ct
x0 = ct0
ct = K (ct0 + ct0 )
= K(1 + )ct0
ct0 = K (ct
= K(1
ct)
d.h.,
1 = K(1
)K(1 + )
)
K2 =
(6.49)
(6.50)
(6.51)
)ct ,
1
(6.52)
2
1
Deshalb muss die Konstante K gleich dem Lorentz-Faktor sein (Siehe Kap.
4.2.3), d.h. K = , wobei
1
=p
(6.53)
2
1
Wir erinnern uns daran, dass
oder V ⌧ c.
immer grösser als 1 ist und
⇡ 1 für
⌧1
Die Transformationsgleichung für die Raumkoordinate ist
x0 = K(x
ct) = K {K (x0 + ct0 )
= K 2 x0 + K 2 ct0
und deshalb x0 = K 2 (x0 + ct0 )
ct}
K ct
K ct. Es folgt:
⇢ ✓
◆
1
2
0
K x 1
+ ct0
K 2 (x0 + ct0 ) x0
K2
ct =
=
K
K
⇢
✓
◆
1
1
= K x0
1
+ ct0
K2
(6.54)
214
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
p
Mit der Definition von K = = 1/ 1
✓
◆
1
1
1
1
=
1
2
K
2
finden wir
2
1
=
,
und schliesslich erhalten wir für die Zeittransformation
ct =
( x0 + ct0 )
(6.55)
Die sogenannten Lorentz-Transformationen für den Raum und die Zeit folgen daraus (für parallele Koordinatenachsen und eine Relativbewegung in xRichtung):
8 0
x = (x
ct)
>
>
< 0
y =y
Lorentztransformation
(6.56)
z0 = z
>
>
: 0
ct = (ct
x)
oder in Matrixdarstellung:
0 0 1 0
ct
B x0 C B
B 0 C=B
@ y A @
z0
0
0
0
0
0
0
1
0
10
0
ct
C
B
0 CB x
0 A@ y
1
z
1
C
C
A
(6.57)
In dieser Darstellung ist eine Symmetrie zwischen Raum und Zeit bemerkbar.
Die inverse Transformation können wir durch die folgende Vertauschung finden:
$
;
x $ x0 ;
y $ y0;
z $ z0;
t $ t0
(6.58)
Die Lorentz-Transformation erfüllt das Postulat der konstanten Lichtgeschwindigkeit.
Sie stellt eine Beziehung her zwischen den Raum- und Zeitkoordinaten eines
Ereignisses in einem Bezugssystem O und den Koordinaten desselben Ereignisses in einem anderen Bezugssystem O0 , das sich mit der Geschwindigkeit
c relativ zu O bewegt.
Bemerkung: Für Geschwindigkeiten viel kleiner als die Lichtgeschwindigkeit
vereinfachen sich die Lorentz-Transformationen zu den Galileischen Transformationen. Es gilt im Fall V ⌧ c (d.h., ⌧ 1 und ⇡ 1)
8
V
>
> x0 = (x
ct) ⇡ x
ct ⇡ x V t
>
>
c
>
< 0
y =y
(6.59)
z0 = z
>
>
>
>
V
>
: ct0 = (ct
x) ⇡ ct
x ⇡ ct ,
c
und damit erhalten wir die Galileischen Transformationen wieder.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
6.9
215
Die spezielle Relativitätstheorie
Der Name Relativitätstheorie wird gewählt, um die Unabhängigkeit der Naturgesetze vom Bewegungszustand des Beobachters auszudrücken.
6.9.1
Prinzip der Relativität
Das Prinzip der Relativität ist uns nicht fremd. Es besagt:
Man kann eine geradlinige Bewegung mit konstanter Geschwindigkeit nicht
spüren.
Wir stellen uns z.B. vor, dass wir in einem Flugzeug sind. Das Flugzeug bewegt
sich mit einer Geschwindigkeit von ungefähr 1000 Kilometer pro Stunde. Wir
sitzen im Flugzeug und schauen einen Film an. Wenn die Fenster des Flugzeugs geschlossen sind, können wir nicht sagen, wie schnell sich das Flugzeug
bewegt; wir können die Geschwindigkeit nicht fühlen. Falls wir unser Getränk
verschütten, wird es auf unsere Beine fallen, als ob wir auf der Erdoberfläche
sitzen würden.
Aus den verschiedenen Dingen, die im Flugzeug geschehen, oder aus allen Experimenten, die wir im Flugzeug machen können, ist es unmöglich ganz sicher
zu schliessen, ob das Flugzeug sich wirklich mit konstanter Geschwindigkeit
bewegt oder nicht.
In einigen Fällen kann es logischer sein, anzunehmen, dass das Flugzeug sich
in Ruhe befindet, und die Erde als bewegtes System zu betrachten. Siehe Abb.
6.15.
Flugzeug
Zü
h
ric
Er
de
Erde
nf
Genf
Ge
Zürich
Flugzeug
Abbildung 6.15: Bewegung des Flugzeugs oder der Erde.
In welchem Fall können wir sicher schliessen, dass wir uns bewegen? Wenn wir
scharf anfahren oder bremsen, oder wenn wir um eine scharfe Kurve fahren,
216
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
fühlen wir die Beschleunigung. Die Änderung der Richtung oder des Betrages
der Geschwindigkeit können wir fühlen! Aber wenn es keine Beschleunigung
gibt und wir uns geradlinig mit konstanter Geschwindigkeit bewegen, können
wir nie sagen, ob wir uns wirklich bewegen oder nicht.
Das Prinzip der Relativität kann ausgedrückt werden als:
Alle relativ zu einem Inertialsystem gleichförmig bewegten Bezugssysteme sind
ebenfalls Inertialsysteme und im Rahmen der Mechanik gleichwertig.
D.h., es ist nicht möglich, durch die Überprüfung der physikalischen Gesetze
ein frei bewegtes Bezugssystem vom anderen zu unterscheiden. Es folgt daraus,
dass es in der Natur keine absolute Geschwindigkeit gibt. Bewegung ist wirklich
ein relativer Begri↵!
6.9.2
Die Einsteinschen Postulate
Im Jahr 1905 verö↵entlichte Einstein (im Alter von 26 Jahren) seine Arbeit
Über die Elektrodynamik bewegter Körper“, in der die spezielle Relativitäts”
theorie enthalten ist. Die Theorie basiert auf zwei Postulaten:
1. Das Prinzip der Relativität gilt: Es gibt kein physikalisch bevor”
zugtes Inertialsystem. Die Naturgesetze müssen in allen Inertialsystemen
dieselbe Form annehmen.“
2. Die Maxwellsche Theorie des Elektromagnetismus gilt (in allen Inertialsystemen): Die Ausbreitungsgeschwindigkeit des Lichts
”
(allgemein der elektromagnetischen Wellen) im Vakuum besitzt für jeden
beliebigen Inertialbeobachter denselben Wert c,
c= p
1
⇡ 3 · 108 m/s ,
" 0 µ0
(6.60)
wobei "0 die Dielektrizitäts- und µ0 die Permeabilitätskonstante
im Vakuum ist.“
Es folgt, dass zwei verschiedene Beobachter, die sich relativ zueinander mit
konstanter Geschwindigkeit V bewegen, ihre Beobachtungen des gleichen Ereignisses über die Lorentz-Transformation korrelieren müssen. Diese Postulate
sagen E↵ekte unmittelbar voraus, die zunächst sonderbar, sogar unheimlich
scheinen. Sonderbar oder nicht, werden sie durch logische Argumente hergeleitet und durch Experimente bestätigt!
6.9.3
Invarianz des Raumzeit-Intervalls
Aus der Lorentz-Transformation folgen wichtige E↵ekte für Zeitintervalle und
räumliche Entfernungen. Wir betrachten zwei Ereignisse mit Raumzeitkoordinaten xµ1 = (ct1 , x1 , y1 , z1 ) und xµ2 = (ct2 , x2 , y2 , z2 ) relativ zum Beobachter O.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
217
Wir definieren die räumliche Entfernung (den Abstand) zwischen den zwei
Ereignissen durch
r2 = (x2 x1 )2 + (y2 y1 )2 + (z2
= x2 + y 2 + z 2
Die zeitliche Entfernung (das Zeitintervall)
sen wird definiert als
t = t2 t1
z1 )2
(6.61)
(6.62)
t zwischen den zwei Ereignis(6.63)
Für einen anderen Beobachter O0 erscheinen die zwei Ereignisse im Allgemeinen
mit verschiedenen Raumzeitkoordinaten
µ
µ
x0 1 = (ct01 , x01 , y10 , z10 ) und x0 2 = (ct02 , x02 , y20 , z20 )
(6.64)
Wir bestimmen die räumliche und zeitliche Entfernung bezüglich O0 . Für die
x-Koordinate gilt
x0 = x02
x01 =
=
(x2
=
( x
(x2
x1 )
ct2 )
(ct2
(x1
ct1 )
ct1 )
c t)
(6.65)
und mit einer ähnlichen Herleitung für das Zeitintervall finden wir die folgenden
Gleichungen für die Transformation der Entfernungen x, y, z und t:
8
x0 = ( x
c t)
>
>
>
< y0 = y
(6.66)
>
z0 = z
>
>
:
c t0 = (c t
x)
Es folgt daraus, dass räumliche und zeitliche Entfernungen in verschiedenen Bezugssystemen unterschiedlich sind :
t 6=
t0
)
x 6=
x0
)
r 6=
r0
(6.67)
D.h., von verschiedenen Beobachtern gemessene Zeitintervalle oder räumliche
Abstände zwischen zwei Ereignissen sind nicht immer gleich.
Gibt es eine Entfernung“, die dieselbe für alle Beobachter ist? Das Raumzeit”
Intervall s wird definiert als
s2 ⌘ (c t)2
r2
= (c t)2
x2
y2
z2
✓
◆2 ✓
◆2
Zeitliche
Räumliche
=
Entfernung
Entfernung
(Das negative Vorzeichen für den Raum ist sehr wichtig!).
(6.68)
218
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Wir beweisen nun, dass das Raumzeit-Intervall eine Invariante der
Lorentz-Transformation ist. D.h., jeder beliebige Beobachter misst im Allgemeinen eine verschiedene räumliche und zeitliche Entfernung, aber dasselbe
Raumzeit-Intervall zwischen zwei Ereignissen:
2
s0 = (c t0 )
2
x0
=
2
2
c2 t 2
=
2
z0
{ ( x
2 c t x+
2
x2
1
2
= c2 t 2
y0
x)}2
= { (c t
=
2
2
2 c t x+
c2 t 2
x2
y2
2
c t)}2
y2
z2
x2
2 2
t2
c
x2
y2
y2
z2
z2
z2
s2
(6.69)
Man kann sagen, dass der Raum und die Zeit für veschiedene Beobachter unterschiedlich sind, aber die Raumzeit ist für alle gleich.
6.9.4
Eigenzeit und Zeitdilatation
Wir betrachten nun die Bewegung einer Masse, die an einer Feder angebunden
ist. Wir wissen, dass für eine nicht zu grosse Anfangsauslenkung die Masse
eine harmonische Schwingung ausführt. Wir nehmen an, dass das Masse-FederSystem sich in einer Rakete befindet und dass die Masse in der y-Richtung
schwingen wird. Siehe Abb. 6.16.
y
x
O
x= y =0
t=T
Abbildung 6.16: Das Raketenbezugssystem bewegt sich ohne Antrieb und frei
durch den Weltraum (es wirkt keine Gravitationskraft). Ein Beobachter O
misst die Schwingungsperiode T der Masse, die an der Feder angebunden ist.
Die Rakete reist ohne Antrieb durch den Weltraum (d.h., sie wird nicht beschleunigt) und sie spürt keine äussere Kraft, insbesondere keine Gravitationskraft. Es folgt, dass die Rakete ein Inertialsystem ist.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
219
Ein Beobachter O befindet sich in der Rakete. Er lenkt die Masse in die yRichtung aus und beobachtet die Schwingung der Masse.
Relativ zu einem zweiten Beobachter O0 bewegt sich die Rakete mit einer Geschwindigkeit c in die x0 -Richtung, d.h., senkrecht zur Richtung der Schwingung. Siehe Abb. 6.17.
V
y
y0
x
x
O
O
x0
O
0
V
y
0
x = c t
y0 = 0
t0 = T 0
0
c t0
Abbildung 6.17: Die Rakete bewegt sich relativ zum Beobachter O0 mit einer
Geschwindigkeit c in die x0 -Richtung. Der Beobachter O0 misst die Schwingungsperiode T 0 der an der Feder aufgehängten Masse.
Wir definieren zwei Ereignisse:
1. Ereignis: die Masse wird losgelassen.
2. Ereignis: die Masse hat eine volle Schwingung durchgeführt.
Wir betrachten die Schwingung bezüglich O. Nach einer Schwingung befindet
sich die Masse wieder in ihrer Anfangsposition. Bezüglich O ist die räumliche
Entfernung zwischen den zwei Ereignissen gleich null. Die zeitliche Entfernung
entspricht der Periode T der Schwingung.
Die zeitliche Entfernung zwischen Ereignissen, die bezüglich eines Bezugssystems am selben Ort stattfinden, heisst Eigenzeitintervall ⌧ .
Für den Beobachter O, der sich relativ zum Masse-Feder-System in Ruhe befindet, ist das Eigenzeitintervall ⌧ gleich der Periode der Schwingung. Das
Raumzeit-Intervall zwischen den zwei Ereignissen ist für O gleich
✓
◆2 ✓
◆2
Zeitliche
Räumliche
2
s =
Entfernung
Entfernung
= {c · (Periode T)}2
= (c ⌧ )2
(0)2
Eigenzeit
(6.70)
220
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Bezüglich des Beobachters O0 bewegt sich die Rakete. Der Beobachter O0 bestimmt das Raumzeit-Intervall zwischen den zwei Ereignissen als
02
s =
✓
◆2
Zeitliche
Entfernung
= c2 t 0
2
x0
✓
2
y0
2
Räumliche
Entfernung
z0
◆2
2
(6.71)
Nach einer Schwingung kehrt die Masse bezüglich O0 nicht in die Anfangsposition zurück. Sie ist in die x0 -Richtung um x0 verschoben:
x0 =
c t0
(6.72)
Während der Schwingung mit der gemessenen Periode t0 , hat sich das MasseFeder-System mit der Geschwindigkeit c in die x0 -Richtung bewegt. Das
Raumzeit-Intervall ist dann gleich
02
s =
✓
◆2
Zeitliche
Entfernung
= c2 t 0
2
= c2 t 0
2
x0
2
y0
( c t0 )
2
= 1
(c t0 )
| {z }
=1/
✓
2
Räumliche
Entfernung
2
z0
02
02
◆2
2
2
(6.73)
2
Da das Raumzeit-Intervall eine Invariante der Lorentz-Transformation ist, muss
es denselben Wert für alle Beobachter besitzen. D.h.,
2
s0 =
1
2
2
c2 t 0 =
s2 = c 2 ⌧ 2 ,
(6.74)
und es folgt:
bezüglich O0
gemessene Zeit
|
{z
}
0
t
=
bezüglich O
gemessene Zeit
|
{z
}
·
⌧
(6.75)
Das in einem bewegten Bezugssystem gemessene Zeitintervall ist immer um
den Faktor grösser als das Eigenzeitintervall. Man spricht von Zeitdilatation.
D.h., Vorgänge scheinen länger zu dauern, wenn sie in einem System ablaufen,
das sich relativ zum Beobachter bewegt, als wenn sich das System in Ruhe
befindet.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
221
Werden unterschiedliche Geschwindigkeiten von allen Uhren wirklich“ beob”
achtet? Die Antwort lautet ja!“. Wäre es möglich, dass komplizierte Uhren
”
(d.h. komplizierter als die einfache Bewegung einer schwingenden Masse) nicht
langsamer gehen? Die Antwort ist nein“.
”
Wäre das mit einer bestimmten Uhr gemessene Zeitintervall verschieden vom
Wert, den die Zeitdilatation voraussagt, dann könnte man diese Uhr benutzen,
um zu entscheiden, ob man sich wirklich bewegt oder nicht. Dies steht aber im
Widerspruch zum Relativitätsprinzip.
Es folgt:
Wenn eine Art von Uhr durch Geschwindigkeitse↵ekte langsamer geht, dann
müssen alle Uhren und, im Allgemeinen, alle Vorgänge, die von der Zeit
abhängen, um genau denselben Faktor langsamer gehen, um das Relativitätsprinzip nicht zu verletzen.
Das Flugzeugexperiment2 : Am 22. November 1975 flog ein Patrouillenflugzeug 15 Stunden lang in einer Höhe von 25 000 bis 35 000 Fuss. Im Flugzeug
befanden sich sehr genaue Atomuhren. Die Uhren wurden mit genau gleichen
Uhren auf der Erde verglichen.
Bei einer mittleren Fluggeschwindigkeit von 140 Metern pro Sekunde lagen die
durch die Luft transportierten Uhren nach dem 15-Stunden-Flug im Durchschnitt 5,6 Nanosekunden zurück. Die Theorie sagt für diese Geschwindigkeit
eine Di↵erenz von 5,7 Nanosekunden vorher. Der Zeitdilatationse↵ekt war bei
diesem Experiment klein, weil die Geschwindigkeit des Flugzeuges klein war
relativ zur Lichtgeschwindigkeit. Aber die Atomuhren sind so genau, dass das
Nachgehen der Uhren eindeutig ist, und es stimmt mit der Theorie überein.
6.9.5
Der ganze Weltraum gehört uns
Das Lichtjahr wird definiert als die Entfernung, die das Licht in einem Jahr
zurücklegt:
1 Lichtjahr = c ⇥ (1 a) ⇡ 9, 5 · 1015 m.
(6.76)
Etwa 99 Lichtjahre von der Erde entfernt liegt der Stern Kanopus. Wir nehmen
an, dass wir den Stern besuchen wollen, um ihn zu fotografieren und mit den
Aufnahmen nach Hause zurückzukehren.
Ist das möglich? Wir überlegen uns: Wir haben nur wenig mehr als 100 Jahre
”
zu leben. Wir können höchstens die halbe Zeit für den Hinflug und die halbe
Zeit für den Rückflug aufbringen. Selbst wenn wir mit Lichtgeschwindigkeit
fliegen würden, würden wir 99 Jahre brauchen, nur um dorthin zu gelangen. . . ”.
Diese Überlegung ist nicht richtig, weil wir die Zeitdilatation berücksichtigen
müssen. Wenn die Rakete zum Kanopus sich z.B. mit einer Geschwindigkeit
2
C.O. Alley, Quantum Optics, Experimental Gravity, and Measurement Theory, ed. P.
Meystre und M.O. Scully (Plenum, New York, 1983).
222
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
V = 0, 994 c bewegt, ist der Lorentz-Faktor gleich
=p
1
1
0,9942
⇡9
(6.77)
D.h., alle Uhren in der Rakete (und auch unser Lebenslauf) gehen neunmal
langsamer als auf der Erde.
Was für jemand auf der Erde als 99 Jahre lang erscheint, dauert für jemand in
der Rakete nur 99/9=11 Jahre.
Wenn die Rakete sich mit einer Geschwindigkeit V = 0,994 c bewegt, dauert
für jemand in der Rakete die Reise zum Stern Kanopus
t=
1x
99 Lichtjahre
=
⇡ 11 a
V
0, 994 c
(6.78)
Mit einer derartigen Geschwindigkeit dauert die Reise zum Kanopus und
zurück 22 Jahre. Es ist dann ganz gut möglich, Kanopus zu besuchen und
mit den Aufnahmen nach Hause zurückzukehren. Für die Leute, die auf der
Erde bleiben, hat die Reise natürlich 99,6 · 2 ⇡ 200 Erdjahre gedauert. . .
Wenn wir in derselben Flugzeit weiter weg reisen wollen, müssen wir eine
schnellere Rakete benutzen! Weil der Lorentz-Faktor für V ! c nach unendlich geht, können wir im Prinzip so weit entfernte Ziele bereisen, wie wir
wollen. Der ganze Weltraum gehört uns!
6.9.6
Längenkontraktion
Wir betrachten noch einmal die Reise zum Stern Kanopus. Wir haben gefunden, dass für die Leute in der Rakete die Reise ungefähr 11 Jahre dauert. In
dieser Zeit hat die Rakete die folgende Distanz zurückgelegt:
x = V t = (0, 994 c) · (11 a) ⇡ 11 Lichtjahre
(6.79)
Wie konnte die Rakete Kanopus erreichen, wenn sie nur eine Distanz von 11
Lichtjahren zurückgelegt hat? Kanopus ist für die Leute in der Rakete viel
weniger weit entfernt!
Die räumliche Entfernung zwischen zwei Punkten (oder die Länge eines Gegenstandes) erscheint geringer, wenn sich der Beobachter relativ zu diesen Punkten
bewegt, als wenn er relativ zu ihnen ruht.
Wie die Zeitdilatation ist das Phänomen der Längenkontraktion real. Die Länge
eines Gegenstandes, gemessen in seinem Ruhesystem, heisst Eigenlänge
(oder Ruhelänge). Wie können wir z.B. die Länge eines sich bewegenden Stabes
messen? Eine Möglichkeit ist es, zur selben Zeit die Positionen der beiden
Enden zu markieren. D.h.,
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
223
der gemessene Abstand zwischen den beiden Enden des Stabes ist gleich der
räumlichen Entfernung zwischen Ereignissen, die zu derselben Zeit gemessen
werden (Siehe die Definition des Zeitintervalls Kap. 6.9.4).
Zum Beweis betrachen wir einen Stab, der sich im Bezugssystem O in Ruhe
befindet. Ein zweiter Beobachter O0 bewege sich relativ zum Stab mit der
Geschwindigkeit V . Es gilt
=
x=
( x0 + c t 0 )
(6.80)
Für O0 ist die Länge des Stabes gleich dem gleichzeitig gemessenen Abstand
der Stabenden, d.h.
bezüglich O0
gemessene Länge
t0 = 0
6.9.7
)
=
x0 )
z}|{
x0
bezüglich O
gemessene Länge
=
z}|{
(6.81)
Die Geschwindigkeitstransformation
Wir haben gesehen, dass aus der Galileischen Transformation die gewöhnliche Vektoraddition der Geschwindigkeit folgt. Mit Hilfe der LorentzTransformation können wir berechnen, wie sich Geschwindigkeiten beim Übergang von einem Beobachter zu einem anderen transformieren.
Wir betrachten einen Körper, der sich mit einer Geschwindigkeit
✓ 0
◆
dx dy 0 dz 0
0
0
0
0
u = ux , uy , uz =
,
,
dt0 dt0 dt0
(6.82)
im Bezugssystem O0 bewegt, das sich seinerseits relativ zum Bezugssystem O
mit einer Geschwindigkeit V in x-Richtung bewegt. Die Geschwindigkeit des
Körpers bezüglich O ist
✓
◆
dx dy dz
u = (ux , uy , uz ) =
, ,
(6.83)
dt dt dt
Die Lorentz-Transformation gilt auch für di↵erentielle Intervalle (Siehe Kap.
6.9.3):
8
dx = (dx0 + c dt0 )
>
>
>
>
< dy = dy 0
(6.84)
0
>
dz
=
dz
>
>
>
:
c dt = (c dt0 + dx0 )
224
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Der Geschwindigkeitsvektor bezüglich O kann damit berechnet werden. Für
die x-Komponente gilt
dx0
+ c
dx
dx
(dx + c dt )
dt0
ux =
=c
=c
=
c
dx0
dt
c dt
(c dt0 + dx0 )
c+
dt0
0
=
0
u0x + V
(6.85)
u0x
1+
c
Für die y-Komponente gilt:
dy 0
0
dy
dy
dy
◆
uy =
=c
=c
= c ✓ dt
0
0
dx0
dt
c dt
(c dt + dx )
c+
dt0
0
=
✓
u0y
1+
c
u x0
◆
(6.86)
und eine entsprechende Gleichung für die z-Komponente. Diese Gleichungen
unterscheiden sich vom gewöhnlichen Ergebnis der Vektoraddition, weil die
Nenner nicht gleich 1 sind. Für den Grenzfall V ⌧ c und u0x ⌧ c gehen diese
Gleichungen in die Galileische Vektoraddition über.
6.9.8
Gleichzeitigkeit
Wir werden nun beweisen, dass der Ausdruck zur selben Zeit“ gewöhnlich nur
”
für ein Bezugssystem Gültigkeit hat.
Abb. 6.18 zeigt eine Anordnung, die auf einem Tisch liegt. Ein Laserpuls wird
emittiert. Der Laserpuls fällt auf einen Strahlteiler. Ein Teil des Lichts geht
nach vorn, wo er schliesslich einen Empfänger erreicht, der an eine grüne Lampe angeschlossen ist. Ein anderer Teil geht nach hinten, wo er einen anderen
Empfänger erreicht, der an eine rote Lampe angeschlossen ist.
Wenn der Laserpuls einen Empfänger tri↵t, schaltet sich die angeschlossene
Lampe ein.
Wir nehmen an, dass der Laser und der Strahlteiler sich in der Mitte des Tischs
befinden.
Da der Laserpuls sich in beide Richtungen des Tischs mit derselben Geschwindigkeit c ausbreitet, werden die grüne und die rote Lampe gleichzeitig eingeschaltet.
Wir stellen uns nun die Frage, was geschehen würde, wenn der Tisch sich
bewegte. Wir definieren zwei Ereignisse im Bezugssystem O des Tischs:
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
225
Laser
y
y0 V
x0
x
O
O0
`
Rote Lampe
`
Grüne Lampe
Strahlteiler
Abbildung 6.18: Eine Anordnung, um die Gleichzeitigkeit von Ereignissen zu
prüfen. Da der Laserpuls sich in beide Richtungen mit der Geschwindigkeit c
ausbreitet, werden die grüne und rote Lampe gleichzeitig eingeschaltet.
1. Ereignis: das Licht erreicht die grüne Lampe
2. Ereignis: das Licht erreicht die rote Lampe
Die Raumzeit-Koordinaten dieser Ereignisse bezüglich O sind gleich
( µ
x1 = (ct, +`, 0, 0)
xµ2 = (ct, `, 0, 0) ,
(6.87)
wobei l der Abstand zwischen den Lampen und dem Strahlteiler ist. Wir haben
das Ergebnis verwendet, dass das Licht die beiden Lampen gleichzeitig erreicht,
und dass deshalb die Zeiten t1 und t2 der beiden Ereignisse einander gleich sind:
t1 = t2 = t
(6.88)
Die Raumzeit-Koordinaten bezüglich eines Beobachters O0 , der sich mit einer Geschwindigkeit c relativ zum Tisch bewegt, wird mit Hilfe der LorentzTransformation gefunden. Es gilt:
( 0
ct1 = (ct1
x1 ) = (ct
`)
(6.89)
ct02 = (ct2
x2 ) = (ct + `)
Der von O0 gemessene Zeitunterschied
t0 =
1 0
(ct
c 2
ct01 ) =
t0 ist dann gleich
1
{ (ct + `)
c
(ct
`)} =
2
`
c
(6.90)
D.h., der Zeitunterschied hängt von der Geschwindigkeit ab und verschwindet
nicht für 6= 0.
226
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Bezüglich des bewegten Beobachters schalten die beiden Lampen nicht gleichzeitig ein! Die Gleichzeitigkeit von Ereignissen ist relativ.
Dieses Ergebnis wird oft als Einsteinsches Zugparadoxon bezeichnet. Wir bemerken zusätzlich, dass das Vorzeichen des Zeitunterschieds vom Vorzeichen
des Geschwindigkeitsparameters abhängt.
Wir unterscheiden zwei Fälle:
8
>0
)
t0 > 0 ) t02 > t01
>
>
>
>
<
) Zuerst geht die grüne Lampe an
>
<0
)
t0 < 0 ) t02 < t01
>
>
>
:
) Zuerst geht die rote Lampe an ,
(6.91)
d.h., die zeitliche Ordnung des Einschaltens der Lampen hängt von der Richtung der Bewegung ab. Nicht nur ist die Gleichzeitigkeit von Ereignissen vom
Beobachter abhängig, aber auch ihre zeitliche Ordnung. Dass ein Ereignis
früher oder später als ein anderes Ereignis geschieht, ist ein relativer Begri↵!3
Wie wird der sich bewegende Beobachter erklären, dass die beiden Lampen
nicht gleichzeitig einschalten? Wir stellen uns vor, dass der bewegte Beobachter
O0 den Tisch sieht, wie in Abb. 6.19 gezeigt. Der Tisch, der Laser und die
Lampen bewegen sich mit einer Geschwindigkeit c in die negative x-Richtung
(d.h., nach links in der Abbildung).
Wegen der Lorentz-Kontraktion erscheint der Tisch verkürzt mit einer halben
Länge
`
`0 =
(6.92)
Wir schreiben die Gleichungen, die die Bewegung der Lampen und des Lichtstrahls beschreiben. Wir nehmen an, dass der Laserpuls zur Zeit t0 = 0 beim
Strahlteiler ist, und dass zu dieser Zeit der Beobachter O0 sich an der Position
des Strahlteilers befindet, d.h. x0 (t0 = 0) = 0.
Für den Beobachter O0 entfernt sich die rote Lampe vom Lichtstrahl mit einer
Geschwindigkeit c, und die grüne Lampe nähert sich dem Lichtstrahl mit einer
Geschwindigkeit c.
8
`
>
0
0
0
0
>
=
ct01
< xgrün (t1 ) = ` V t1
(6.93)
>
`
0
>
0
0
0
0
: xrot (t2 ) = ` V t2 =
ct2
Wegen des Postulats der Lichtgeschwindigkeit breitet sich der Laserpuls in beide
Richtungen des Tischs mit derselben Geschwindigkeit c aus.
3
Die Gleichzeitigkeit der Ereignisse wird von der Relativitätstheorie gebrochen. Man kann
beweisen, dass die Kausalität von Ereignissen nicht verletzt wird, solange keine Information
sich schneller als die Lichtgeschwindigkeit ausbreiten kann.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
227
Laser
y
V
y0
x0
x
O
O0
`0
`0
Rote Lampe
Grüne Lampe
Strahlteiler
V
c
c
V
Abbildung 6.19: Der Tisch, wie er vom Beobachter O0 gesehen wird. Der Beobachter sieht, dass die rote Lampe sich vom Lichtstrahl entfernt, und dass die
grüne Lampe sich dem Lichtstrahl nähert.
⇢
x0Licht1 = ct01
x0Licht2 = ct02
(6.94)
Die Lichtstrahlen tre↵en zu den Zeiten t01 bzw. t02 bei den Lampen ein:
8
`
`
>
0
0
>
ct01 = ct01
) (1 + )ct01 =
< xgrün (t1 ) =
Es folgt:
>
>
: x0rot (t02 ) =
1
t = (ct02
c
2 `
=
c
0
ct01 )
`
=
c
`
✓
ct02
1
1
=
1
1+
ct02
◆
)ct02
) (1
`
=
c
✓
1+
=
`
1+
1
2
◆
=
(6.95)
2 `
c
2
(6.96)
Damit haben wir das Ergebnis wieder gefunden, das mit Hilfe der LorentzTransformation hergeleitet wurde.