6. Steuerungstechnik Teil IV
Werbung

6. Steuerungstechnik Teil IV
Das gezielte Beeinflussen von Vorgängen, denen ein schrittweiser, d.h. diskreter Ablauf
zugrunde liegt, gehört in der Automatisierungstechnik neben der Regelung bzw. Steuerung kontinuierlicher Prozesse zu den am häufigsten vorkommenden Aufgaben. Solche
Probleme treten z.B. in der Fertigungstechnik auf, wie das Beschicken von Arbeitsmaschinen, in der Verfahrenstechnik als Chargenprozesse, etc.. Charakteristisch für diese
Aufgaben ist, dass die Zustände der Prozesse durch Größen, die nur endlich viele Werte
annehmen können, charakterisiert werden. Bei einfach zu überblickenden, ausschließlich
sequentiell ablaufenden Prozessen ist der Nachweis der Funktionsfähigkeit der Steuerung
noch relativ einfach, da sämtliche auftretenden Zustände erfasst werden können. Enthält
das System hingegen nebenläufige Prozesse mit der Nutzung gemeinsamer Betriebsmittel,
so besteht beispielsweise die Gefahr von Verklemmungssituationen. Dies sollte im Rahmen
der Analyse eines Steuerungssystems einfach festgestellt werden können.
Eine diskrete Steuerung arbeitet, im Gegensatz zu einer Steuerung im Kontinuierlichen,
in einem geschlossenen Wirkungskreis. Die gegenseitigen Kopplungen der Vorgänge in
einem diskret gesteuerten System charakterisieren das dynamische Verhalten. Im nachfolgenden Kapitel wird gezeigt, wie mit Hilfe von Petri-Netzen das dynamische Verhalten
beschrieben und hinsichtlich gewisser Anforderungen überprüft werden kann.
6.1. Zur Theorie kausaler Petri-Netze
Die nachfolgend behandelten Petri-Netze gehören zur Klasse der sogenannten Stellen/Transitionen Netze (S/T Netze), die sich für die Modellierung von Systemen mittlerer
Größenordnung und Komplexität eignen.
6.1.1. Ein einführendes Beispiel
Abbildung 6.1 zeigt das Verfahrensbild einer einfachen chemischen Anlage. Dabei handelt
es sich um eine sogenannte kooperative Kopplung zweier Prozesseinheiten R1 und R2
über einen Zwischenspeicher B1. In der Prozesseinheit R1 wird ein definiertes Volumen
an Stoff produziert und anschließend in den Zwischenspeicher B1, welcher maximal zwei
Chargen aus R1 fassen kann, abgelassen. Erst wenn B1 zwei Chargen Produkt enthält,
wird dessen Inhalt komplett nach R2 abgelassen. Dazu muss R2 leer sein. Die Aufgabe
besteht nun darin, das Produktionssystem in Form eines Petri-Netzes zu modellieren.
6.1.2. Syntax und Darstellung
Petri-Netze sind gewisse Sonderfälle gerichteter Graphen.
131
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
Einsatzstoffe
R1
Einsatzstoff
B1
R2
Abbildung 6.1: Verfahrensfließbild einer chemischen Anlage.
Definition 6.1. Ein gerichteter Graph (Digraph) G = (X, Y ) besteht aus der Menge der
Knoten X und der Menge der Kanten Y . Jedem Element y ∈ Y wird genau ein geordnetes
Paar (a, b) ∈ X × X von Knoten a, b ∈ X zugeordnet.
Petri-Netze können nun folgendermaßen definiert werden.
Definition 6.2. Ein Petri-Netz ist ein 6-Tupel N = (S, T, F, K, W, M0 ) mit
©
ª
(1) der nichtleeren, endlichen Stellenmenge S = s1 , s2 , . . . , s|S| ,
ª
©
(2) der nichtleeren, endlichen Transitionsmenge T = t1 , t2 , . . . , t|T | ,
(3) der nichtleeren Kantenmenge F (Flussrelation), wobei jeder Kante genau ein Paar
aus (S × T ) ∪ (T × S) zugeordnet ist,
(4) der Funktion K : S → N \ {0}, der Kapazität jeder Stelle,
(5) der Funktion W : F → N \ {0}, dem Gewicht einer Kante und
(6) der Anfangsmarkierung M0 : S → N.
132
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
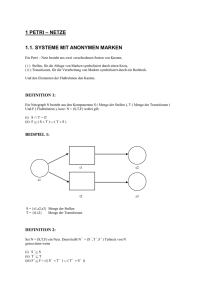
Für ein Petri-Netz gilt nun offensichtlich X = S∪T und Y = F . Es existieren aber nur zwei
Arten von Knoten, und nur Knoten verschiedenen Typs dürfen miteinander verbunden
werden. Ohne besondere Einschränkung wird im Folgenden vorausgesetzt, dass ein PetriNetz keine mehrfachen Kanten zwischen zwei Knoten und keine Schlingen besitzt. Solche
Petri-Netze heißen auch rein. Bei reinen Petri-Netzen ist eine Kante durch Angabe der
mit ihr verbundenen Knoten eindeutig bestimmt. Es gilt also F ⊂ (S × T ) ∪ (T × S) und
weiters für alle Kanten, falls (si , tj ) ∈ F dann (tj , si ) ∈
/ F.
s1
10
3
t1
t2
2
s2
7
Abbildung 6.2: Zu den Symbolen eines Petri-Netzes.
Die Symbole der graphischen Darstellung eines Netzes N = (S, T, F, K, W, M0 ) mit den
speziellen Werten
S = {s1 , s2 }
T = {t1 , t2 }
F = {(s1 , t2 ), (t2 , s2 ), (s2 , t1 ), (t1 , s1 )}
K(s1 ) = 10
K(s2 ) = 7
W (s1 , t2 )
W (t2 , s2 )
W (s2 , t1 )
W (t1 , s1 )
=
=
=
=
1
2
1
3
M0 (s1 ) = 1
M0 (s2 ) = 0
sind Abbildung 6.2 zu entnehmen. Die Stellen si ∈ S werden durch Kreise symbolisiert.
Sie sind die passiven Elemente des Netzes. In den Kreis wird ihre Kapazität eingetragen, wobei die Kapazität die Anzahl der Marken angibt, die eine Stelle aufnehmen kann.
Nicht beschriftete Stellen haben die Kapazität eins. Die Transitionen ti ∈ T werden durch
Rechtecke dargestellt. Sie sind die aktiven Elemente, die durch Schaltvorgänge den Markenfluss im Netz verursachen. Netzknoten werden durch Kanten der Art (s, t) oder (t, s)
verbunden, wobei das Gewicht angibt, wieviele Marken bei einem Schaltvorgang über die
Kante fließen. Nicht beschriftete Kanten haben das Gewicht eins. Haben alle Kapazitäten
und Gewichte eines Netzes den Wert eins, heißt es Bedingungs/Ereignis-Netz (B/E-Netz).
Das Petri-Netz zur Chemieanlage von Abbildung 6.1 ist Abbildung 6.3 zu entnehmen mit
133
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
t5
t6
s9
s8
s6
t4
t3
s7
s1
t2
2 t1
s3
s4
2
t7
s5
s2
Abbildung 6.3: Petri-Netz zur Chemieanlage von Abbildung 6.1.
der nachfolgenden Interpretation der Netzelemente.
s1
s2
s3
s4
s5
s6
s7
s8
s9
Stellen
B1 ist mit M (s1 ) Chargen gefüllt
R2 ist leer
Ablassen aus B1 nach R2
B1 ist frei für M (s4 ) Chargen
R2 ist voll
R1 enthält Produkt
Ablassen aus R1 nach B1
Füllen von R1
Produktion einer Charge in R1
t1
t2
t3
t4
t5
t6
t7
Transitionen
Start des Ablassens aus B1 nach R2
Ende des Ablassens aus B1 nach R2
Start des Ablassens aus R1 nach B1
Ende des Ablassens aus R1 nach B1
Start der Produktion in R1
Ende der Produktion in R1
Ablassen von R2
(Einzelheiten sind im Netzmodell
nicht beachtet)
Neben der graphischen Beschreibung, lassen sich reine Petri-Netze auch mittels Matrizen
darstellen (vektorielle oder algebraische Beschreibung).
Definition 6.3. Einem Petri-Netz werden die Größen Transitionsvektor, Netzmatrix,
Kapazitätsvektor und Anfangsmarkierungsvektor gemäß nachfolgenden Vorschriften zugeordnet.
(1) Für den Transitionsvektor tj zu einer Transition tj ∈ T
tj =
tj1
tj2
∈ Z |S|
..
.
tj|S|
134
6.1. Zur Theorie kausaler Petri-Netze
gilt
Kapitel 6. Steuerungstechnik Teil IV
−W (si , tj )
W (tj , si )
tji =
0
falls
(si , tj ) ∈ F
falls
(tj , si ) ∈ F
sonst
mit i = 1, . . . , |S| und j = 1, . . . , |T |.
(2) Die aus den Transitionsvektoren gebildete Matrix
£
¤
N = t1 , t2 , . . . , t|T |
heißt Netzmatrix.
(3) Der Kapazitätsvektor z wird aus den Kapazitäten der Stellen si gemäß der Beziehung
K(s1 )
K(s2)
z=
..
.
K(s|S| )
gebildet.
(4) Der Anfangsmarkierungsvektor m0 enthält die Anfangsmarkierungen nach der Vorschrift
M0 (s1 )
M0 (s2)
.
m0 =
..
.
M0 (s|S| )
Für das einfache Petri-Netz von Abbildung 6.2 sind diese Größen durch
·
¸
· ¸
· ¸
3 −1
10
1
N=
, z=
und m0 =
−1 2
7
0
gegeben.
6.1.3. Erreichbarkeitsgraph
Definition 6.4. Es gelte x, y ∈ S ∪ T für die Knoten eines Petri-Netzes N.
(1) Die Menge aller Knoten •x ∈ S ∪ T , von denen Kanten zum Knoten x führen, heißt
Vorbereich von x :
•x = {y | (y, x) ∈ F } .
(2) Die von x zu erreichenden Knoten heißen Nachbereich x•. Es gilt:
x• = {y | (x, y) ∈ F } .
135
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
Beim Schalten einer Transition t werden jeder Stelle des Vorbereiches si ∈ •t eine dem
Gewicht der zugehörigen Kante entsprechende Markenanzahl entzogen und jeder Stelle des
Nachbereiches si ∈ t• entsprechend dem Gewicht der zuführenden Kanten hinzugefügt.
Eine Transition heißt schaltfähig, wenn durch ihr Schalten eine zulässige Markierung
erzeugt wird. Zum tatsächlichen Schalten ist jedoch eine externe Eingabe vonnöten.
Definition 6.5. Eine Transition t ist schaltfähig unter einer Markierung M, man nennt
sie M-aktiviert, wenn
0≤m+t≤z
gilt. Durch Schalten einer Transition t entsteht eine Folgemarkierung
m0 = m + t.
Obige Schaltregel heißt auch starke Schaltregel. Berücksichtigt man die Kapazität der
Stellen nicht (die rechte Ungleichung), spricht man von der schwachen Schaltregel.
Definition 6.6. Eine Transitionsfolge
mit
σ = t1 , t2 , . . . , tn
ti ∈ T , für i = 1, . . . , n
heißt Schaltsequenz. Eine Schaltsequenz heißt anwendbar bei M, wenn
0≤m+
i
X
k=1
tk ≤ z
für i = 1, . . . , n
gilt.
Definition 6.7. Eine Markierung M eines Petri-Netzes N heißt erreichbar, falls eine
anwendbare Schaltsequenz existiert, die M0 in M überführt. Die Menge aller erreichbaren
Markierungen heißt Erreichbarkeitsmenge, und man schreibt dafür RN (M0 ).
Die Erreichbarkeitsmenge wird im Allgemeinen als Digraph (Erreichbarkeitsgraph) dargestellt. Abbildung 6.4 zeigt den Erreichbarkeitsgraphen für das einfache Petri-Netz von
Abbildung 6.2. Auf analoge Art und Weise lässt sich der Erreichbarkeitsgraph für das
Petri-Netz der Chemieanlage Abbildung 6.3 bestimmen (siehe Abbildung 6.5).
Aufgabe: Welche Markierungen liegen in Abbildung 6.5 bei m0 bis m24 vor?
Satz 6.1. Ist M eine erreichbare Markierung eines Petri-Netzes N, dann besitzt das
Gleichungssystem
m = m0 + Nv
eine nichtnegative, ganzzahlige Lösung v.
136
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
5 7
t
1
t
1
0 7
t
2
3 6
t
1
t
1 5
t
2
2 3
t
0 2
1
t
2
3 1
t
1
2
t
2
6 5
t
2
t
1
t
1
5 2
t
1
t
t
1
t
8 6
t
2
9 4
t
1
7 3
4 4
t
2
t
1
t
2
10 2
2
8 1
2
6 0
t
2
1 0
Abbildung 6.4: Erreichbarkeitsgraph zum Petri-Netz von Abbildung 6.2.
Man beachte, dass v nur angibt wie oft eine Transition schaltet, aber nicht in welcher
Reihenfolge die Schalthandlungen auszuführen sind. Eine Markierung ist auch nur dann
erreichbar, wenn alle Zwischenmarkierungen bei der Überführung von m0 zu m zulässig
sind. Obiger Satz ist also nur ein notwendiges Kriterium. So folgt im Beispiel nach
Abbildung 6.4 für
· ¸
8
m=
6
nach obigem Satz
· ¸
4
v=
.
5
Man überzeugt sich leicht, dass die Schaltsequenz
σ = t2 , t1 , t1 , t2 , t1 , t2 , t1 , t2 , t2
m0 in m überführt. Für
·
10
m=
7
folgt
¸
· ¸
5
v=
.
6
Wie man Abbildung 6.4 entnehmen kann, ist diese Markierung aber nicht erreichbar.
6.1.4. Qualitative Eigenschaften
Reversibilität
Reversible Netze besitzen die Eigenschaft, dass der Anfangszustand von allen sich ergebenden Folgezuständen wieder erreicht werden kann. Reversibilität ist dann eine wünschenswerte Eigenschaft, wenn die Anfangsmarkierung einen Zustand beschreibt, der Teil des
137
6.1. Zur Theorie kausaler Petri-Netze
m0
t1 t
5
t1
m14
t6
t1
m1
t2
m23
Kapitel 6. Steuerungstechnik Teil IV
t6
t5
m2
t5
t2
m21
t6
m24
t5
t7
m3
t2
m22
t6
m4
t7
m20
t4
m12
m15
t7
t6
m11
t7
t5
t3
m5
t7
m19
t4
t4
m6
t7
m18
t5
m13
t7
t3
m10
t4
t7
m9
t3
t3
m16
t7
m8
t6
t6
t5
m17
t7
m7
Abbildung 6.5: Erreichbarkeitsgraph zum Petri-Netz von Abbildung 6.5.
gewünschten Ablaufes ist. Falls die Anfangsmarkierung einen Ruhezustand des Systems
beschreibt (z.B. einen Zustand, in dem alle Behälter leer sind), dann ist man möglicherweise nicht daran interessiert, diesen Zustand während des Prozesses wieder zu erreichen.
Definition 6.8. Ein Petri-Netz N heißt reversibel, wenn für alle Markierungen M1 , M2 ∈
RN (M0 ) gilt
M2 ∈ RN (M1 ) und M1 ∈ RN (M2 ).
Satz 6.2. Ist N ein reversibles Petri-Netz, dann besitzt das Gleichungssystem
Nv = 0
eine nichtnegative, ganzzahlige Lösung v 6= 0.
Aus dem Grund, dass bei der Bedingung von Satz 6.2 auch nicht zulässige Zwischenmarkierungen auftreten können, ist sie lediglich notwendig. Für das Petri-Netz der Chemieanlage von Abbildung 6.3 ist die Forderung nach Reversibilität sinnvoll, da die Anfangsmarkierung einen Zustand des Produktionssystems kennzeichnet, der Teil des Sollverhaltens
ist.
Beschränktheit
Petri-Netze können unbeschränkte Erreichbarkeitsmengen besitzen. Die nachfolgende Eigenschaft schließt dies aus.
Definition 6.9. Die Stelle s eines Petri-Netzes N heißt k-beschränkt bei M0 , wenn für
alle M ∈ RN (M0 ) eine positive ganze Zahl so existiert, dass
M(s) ≤ k
gilt. Das Netz N heißt beschränkt bei M0 , wenn jede Stelle beschränkt ist. Man nennt ein
Netz sicher bei M0 , wenn jede Stelle durch k = 1 beschränkt ist.
138
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
In den hier behandelten Fällen ist sehr oft zu fordern, dass die Netze beschränkt sind.
Unbeschränktheit kann z.B. bedeuten, dass eine unendliche Menge von Ressourcen zugelassen wird, oder dass begrenzte Kapazitäten von Ressourcen überschritten werden, was
praktisch zu einer Fehlfunktion der Steuerung führen kann.
Lebendigkeit
In Petri-Netzen können Markierungen auftreten, von denen aus nicht mehr alle Transitionen aktivierbar sind:
• Im Falle der totalen Verklemmung liegt eine Markierung vor, in der keine Transition mehr schalten kann. D.h., es wird eine Situation bezeichnet, wo sämtliche
ablaufenden Prozesse zum Stillstand kommen. So etwas ist generell zu vermeiden.
• Bei einer partiellen Verklemmung tritt eine Markierung auf, bei der nur noch ein
Teil der Transitionen aktiviert werden kann. Dieser Fall ist durchaus von Interesse
und wird teilweise gezielt herbeigeführt. Beispielsweise im Störfall bzw. bei Not-Aus
Situationen dürfen bestimmte Prozesse nicht mehr aktiviert werden, was zu einer
partiellen Verklemmung führt.
Definition 6.10. Eine Transition t eines Petri-Netzes N heißt tot, wenn sie bei keiner
Folgemarkierung von M0 aktiviert werden kann. D.h., RN (M0 ) enthält keine Markierung,
die eine Aktivierung von t zulässt.
Eine Markierung M heißt tot, wenn keine Transition M-aktiviert ist.
Während eine tote Transition bei keiner Markierung der Erreichbarkeitsmenge schalten
kann, aktiviert eine tote Markierung keine Transition.
Definition 6.11. Eine Transition t eines Petri-Netzes N heißt lebendig, wenn t bei jeder
Folgemarkierung M ∈ RN (M0 ) aktivierbar ist. D.h., es existiert eine Markierung M 0 ∈
RN (M) die t aktiviert.
Das Netz N nennt man lebendig, wenn alle Transitionen lebendig sind.
Abbildung 6.6 zeigt ein nicht lebendiges Petri-Netz ohne tote Markierungen mit den Matrizen
2
−2 −1 1
2
N = 1 −1 1 , z = 2 und m0 = 0 .
1
0 1 −1
2
Zuerst ist nur t1 schaltfähig und man erhält
0
m1 = 1 .
1
Jetzt kann nur t3 schalten, und es folgt
1
m2 = 2 .
0
139
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
t2
t1
s1
2
s2
2
2
s3
t3
2
Abbildung 6.6: Nicht lebendiges Petri-Netz ohne tote Markierung.
t2 ist die einzige schaltfähige Transition, und die nächste Markierung ist
0
1 .
=
m3
1
Damit ist aber der Kreis geschlossen und das System führt einen zyklischen Prozess durch.
Abbildung 6.7 zeigt das Verfahrensfließbild eines Produktionssystems, in dem in den Reaktoren R1 und R2 zwei unterschiedliche Produkte hergestellt werden. Für beide Produkte
werden die Einsatzstoffe A und B benötigt. Im Reaktor R1 werden zuerst Stoff A und
danach Stoff B und im Reaktor R2 zuerst Stoff B und anschließend Stoff A dosiert. Die
Dosiervorlagen müssen exklusiv genutzt werden.
Mit den Stellen und Transitionen
s1
s2
s3
s4
s5
s6
s7
s8
Stellen
Dosiervorlage A ist frei
Dosiervorlage B ist frei
R1 ist leer
Dosieren von Stoff A in R1
Dosieren von Stoff B in R1
R2 ist leer
Dosieren von Stoff B in R2
Dosieren von Stoff A in R2
t1
t2
t3
t4
t5
t6
Transitionen
Start der Dosierung von Stoff A in R1
Ende der Dosierung von Stoff A in R1
Reaktion in R1, Entleeren
Start der Dosierung von Stoff B in R2
Ende der Dosierung von Stoff B in R2
Reaktion in R2, Entleeren
folgt das Petri-Netz von Abbildung 6.8.
Der zugehörige Erreichbarkeitsgraph ist in Abbildung 6.9 dargestellt. Man erkennt, dass
die Markierung m5 eine tote Markierung darstellt. Diese wird erreicht, wenn bei der Anfangsmarkierung die Ereignisse t1 und t2 in beliebiger Reihenfolge (kausal unabhängig)
schalten. Dann werden im Reaktor R1 der Stoff A und im Reaktor R2 der Stoff B dosiert. Die Dosiervorlage A wird von R1 erst dann freigegeben, wenn die Dosiervorlage B
140
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
Einsatzstoff A
Einsatzstoff B
A
B
R2
R1
Produkt 1
Produkt 2
Abbildung 6.7: Verfahrensfließbild einer Produktionsanlage.
verfügbar ist. Analoges gilt für die Freigabe der Dosiervorlage B beim Reaktor R2. Auf
diese Weise blockieren sich beide Prozesse. Dieser Zustand kann einfach vermieden werden, wenn durch die Steuerung zuerst die benutzten Dosiervorlagen freigegeben werden
und erst anschließend auf andere zugegriffen wird.
Aufgabe: Ändern Sie das Petri-Netz von Abbildung 6.8 so ab, dass es keine tote Markierung
mehr beinhaltet.
Konflikte und Nebenläufigkeit
Bei einem Petri-Netz können mehrere Transitionen gleichzeitig aktiviert sein. Diese können
unabhängig voneinander, d.h., gleichzeitig oder nur alternativ schalten. Entzieht z.B. das
Schalten einer Transition der anderen die Aktivität, spricht man von einem Konflikt.
Ein Konflikt kann eintreten, wenn die Vor- bzw. die Nachbereiche von Transitionen sich
überlappen.
Definition 6.12. M 0 sei die Folgemarkierung von M durch Schalten von tk . Bei der
Markierung M liegt ein Konflikt zwischen den Transitionen tk , tl vor, wenn tk und tl Maktiviert sind, aber tl nicht M 0 -aktiviert ist. Ist jede Markierung ohne Konflikt, heißt das
Petri-Netz N konfliktfrei.
141
6.1. Zur Theorie kausaler Petri-Netze
Kapitel 6. Steuerungstechnik Teil IV
s1
s3
s2
s6
t1
t4
s4
s7
t2
t5
s5
s8
t3
t6
Abbildung 6.8: Petri-Netz zur Produktionsanlage von Abbildung 6.7.
Abbildung 6.10 zeigt je ein konfliktfreies und -behaftetes Petri-Netz. Konflikte treten beispielsweise dann auf, wenn sich zwei Betriebsmittel eine gemeinsame Resource teilen. Diese
Eigenschaft kann bei einem modellgestützten Steuerungsentwurf zu Effekten führen, die
unerwünscht sind. So gibt es nun verschiedene Möglichkeiten, eine Lösung des Konfliktes
herbeizuführen.
(1) Regulationskreis: Der sogenannte Regulationskreis von Abbildung 6.11 erzwingt
durch die Bedingungen s3 und s4 sowie den zugehörigen Kanten, dass die ursprünglich im Konflikt stehenden Transitionen t2 und t3 streng abwechselnd schalten.
(2) Inhibitorkante: Die Inhibitorkante von Abbildung 6.12 a.) bedingt, dass bei einem
Konflikt zwischen den Transitionen t2 und t3 immer t2 die Priorität behält. Damit
m0
t1
t4
m1
t1
t4
t2
t3
m3
m2
m5
t5
m4
t6
Abbildung 6.9: Erreichbarkeitsgraph zum Petri-Netz Abbildung 6.8.
142
6.1. Zur Theorie kausaler Petri-Netze
s1
t1
Kapitel 6. Steuerungstechnik Teil IV
s2
t1
t3
t2
s3
t2
s1
s4
s2
t3
s3
t4
konfliktbehaftetes Netz
konflikfreies Netz
Abbildung 6.10: Zum Konflikt in einem Petri-Netz.
t1
s2
s1
s3
t2
s5
t3
s4
Abbildung 6.11: Konfliktlösung durch Regulationskreis.
wird auch der Konflikt beseitigt. Eine Inhibitorkante darf nur von einer passiven
zu einer aktiven Komponente gehen und sie bewirkt, dass die aktive Komponente (Transition) nur dann schalten kann, wenn die zugehörige passive Komponente
(Stelle) keine Marke enthält. Die Realisierung der Inhibitorkante ist in Abbildung
6.12 b.) dargestellt.
(3) Externe Bedingungen: Abbildung 6.13 zeigt schließlich die Variante, dass der
Konflikt durch externe Bedingungen (Eingaben) s4 und s5 entschieden werden kann.
D.h., in diesem Fall gibt der Mensch oder eine übergeordnete Prozesssteuerung durch
eine Markierung für s4 bzw. s5 vor, wie der Konflikt zu lösen ist. Man erkennt, dass
Konflikte in einem Steuerungssystem zusätzliche Freiheitsgrade (Entscheidungsmöglichkeiten) angeben, mittels derer das Systemverhalten gezielt beeinflusst werden
kann.
143
6.1. Zur Theorie kausaler Petri-Netze
t1
Kapitel 6. Steuerungstechnik Teil IV
t1
s2
s1
t2
s5
s3
s2
s5
s1
s4
2
Inhibitorkante
t3
2
t2
2
t3
Abbildung 6.12: Konfliktlösung durch Inhibitorkante.
t1
s5
s1
s2
s4
s5
t2
t3
Abbildung 6.13: Konfliktlösung durch externe Eingabe.
Das Gegenteil zum Konflikt zweier Transitionen ist die sogenannte Nebenläufigkeit, dabei
wird durch das Schalten einer Transition der anderen nicht die Aktivität entzogen.
Kontakte
Wird das Aktivieren einer Transition durch die Markierung des Nachbereiches verhindert,
liegt ein Kontakt vor (siehe Abbildung 6.14).
Definition 6.13. Bei der Markierung M liegt ein Kontakt an der Transition t vor, wenn
gilt
m+t≥0 ,
aber mindestens eine der Ungleichungen
m+t≤z
verletzt ist. Ein Petri-Netz N heißt kontaktfrei, wenn jede Markierung kontaktfrei ist.
144
6.1. Zur Theorie kausaler Petri-Netze
s1
s2
Kapitel 6. Steuerungstechnik Teil IV
s1
t1
s2
t1
t1
s4
s3
s1
s2
s4
s3
kein Kontakt
kein Kontakt
Kontakt
s4
s3
Abbildung 6.14: Zum Kontakt in einem Petri-Netz.
Kontaktfreie Netze weisen bei der schwachen bzw. der starken Schaltregel das gleiche
Verhalten auf.
Satz 6.3. Ein Petri-Netz N ist kontaktfrei, wenn für jede Markierung M ∈ RN (M0 ) aus
m+t≥0
folgt
m+t≤z .
Kontakte in einem System bezeichnen gewisse technologische Anforderungen. Dies kann
z.B. dadurch gegeben sein, dass mit der Kapazität einer Stelle das begrenzte Volumen
eines Behälters modelliert wird.
t5
s9
s8
t5
t6
t4
s9
s6
s8
t3
t4
s1
2 t1
s6
t3
s7
s7
f1
t6
2
t2
s1
s3
2 t1
t2
s3
t7
t7
s5
s5
s2
s2
Abbildung 6.15: Zu Petri-Netzen mit beschränkten Kapazitäten.
145
6.2. Beispiel: Einfache Fertigungsstraße
Kapitel 6. Steuerungstechnik Teil IV
Bemerkung: Jene Zustände, die einen Kontakt darstellen, werden manchmal auch in
Form von sogenannten Fakten modelliert. Ein Fakt ist eine aktive Komponente, die unter
keiner erreichbaren Markierung eine Konzession zum Schalten erhalten darf.
Als Beispiel betrachte man die Chemieanlage von Abbildung 6.1. Die Modellierung erfolgt
nun mittels des Petri-Netzes von Abbildung 6.15, welches sich direkt durch Vernachlässigung von s4 in Abbildung 6.3 ergibt. Aufgrund dieser Modifikation kann die maximale
Markenanzahl von 2 bei der Stelle s1 überschritten werden, was wiederum ein Überlaufen
des Zwischenbehälters B1 bedingen würde. Dadurch beschränkt man im Petri-Netz die
Kapazität der Stelle s1 mit 2 (Abbildung 6.15 rechts) oder man fügt einen Fakt f1 dazu
(Abbildung 6.15 links), der erst dann schaltfähig ist, wenn mehr als zwei Marken bei s1
vorliegen.
6.2. Beispiel: Einfache Fertigungsstraße
Zur Modellbildung diskret gesteuerter Prozesse mit Petri-Netzen verwendet man oft eine
tabellarische Zusammenstellung
(1) der im System auftretenden Ereignisse,
(2) der zum Eintreten eines Ereignisses notwendigen Bedingungen (Vorbedingungen)
und
(3) der Beeinflussung des Systems durch das Eintreten von Ereignissen (Nachbedingungen).
Abbildung 6.16 zeigt einen Ausschnitt aus zwei Fertigungsstraßen A und B, an denen
zwei Handhabungsgeräte I und II angebracht sind. Vorerst werden zur Bearbeitung von
Werkstücken auf A beide Handhabungsgeräte und zur Bearbeitung von Werkstücken auf
B nur das Gerät II benötigt. Die Bedingungen (Stellen) und die Ereignisse (Transitionen)
I
B
II
A
B
A
Abbildung 6.16: Eine einfache Fertigungsstraße.
146
6.2. Beispiel: Einfache Fertigungsstraße
Kapitel 6. Steuerungstechnik Teil IV
~
s1
~
A
B
s4
t3
t1
I
s2
II
s8
s7
s5
t2
t4
s3
s6
~
~
Abbildung 6.17: Petri-Netz zum Abbildung 6.16.
lauten
s1
s2
s3
s4
s5
s6
s7
s8
Stellen
Werkstück auf A noch nicht bearbeitet
Werkstück auf A wird bearbeitet
Werkstück auf A ist bearbeitet
Werkstück auf B noch nicht bearbeitet
Werkstück auf B wird bearbeitet
Werkstück auf B ist bearbeitet
Handhabungsgerät I ist frei
Handhabungsgerät II ist frei
t1
t2
t3
t4
Transitionen
Beginn der Bearbeitung auf A
Ende der Bearbeitung auf A
Beginn der Bearbeitung auf B
Ende der Bearbeitung auf B
und die Vor- bzw. Nachbedingungen zu jedem Ereignis sind in der Form
Transitionen Vorbedingungen Nachbedingungen
t1
s1 , s7 , s8
s2
t2
s2
s3 , s7 , s8
t3
s4 , s8
s5
t4
s5
s6 , s8
147
6.2. Beispiel: Einfache Fertigungsstraße
Kapitel 6. Steuerungstechnik Teil IV
gegeben.
s1 A
B
s4
t1
s7
II
t3
t2
t6
t5
s8
01010001
t6
s5
t2
s3
t1
t4
I
s2
10010011
s6
t4
00110010
t4
00101000
01000100
t1
t6
t3
t3
10001001
t5
10000110
Abbildung 6.18: Das Petri-Netz und der Erreichbarkeitsgraph zu Variante I .
Abbildung 6.17 zeigt das B/E-Netz des Prozesses, mit einer Anfangsmarkierung die besagt, dass die Geräte frei und Werkstücke vorhanden sind. Dem Netz ist nicht nur die
Verkopplung der Prozesse (s8 ) sondern auch die Abhängigkeit von den vorangehenden
und den folgenden Fertigungsstationen zu entnehmen. Eine Verbesserung brächten Speicherstationen an den Stellen (s1 , s3 , s4 , s6 ). Dann wird man aber anstelle von B/E-Netzen
S/T-Netze heranziehen. Sollten auch mehrere Werkstücke gleichzeitig entnommen werden, kann man dies durch das Gewicht der Kanten ausdrücken. Dieses Beispiel umfasst
zwei nebenläufige Prozesse, die durch s8 gekoppelt sind. Das Handhabungsgerät II wird
von beiden Prozessen exklusiv genutzt. Bei solchen Prozessen können Verklemmungen
auftreten. Um dies zu zeigen wird dieser Prozess so erweitert, dass zur Fertigung auf B,
auch das Gerät I benötigt wird. In der ersten Variante wird jedes Werkstück auf A bzw.
B nacheinander von den Geräten I und II gefertigt. Die Modellierung des Netzes erfolgt
vollkommen analog zu obigem. Abbildung 6.18 ist das Petri-Netz mit dem zugehörigen
Erreichbarkeitsgraphen zu entnehmen. Die Kanten (t3 , s1 ) und (t6 , s4 ) sind eingeführt
worden, um jeden Teilprozess für sich betrachten zu können.
In der zweiten Variante wird lediglich die Reihenfolge des Einsatzes der Handhabungsgeräte auf B vertauscht. Abbildung 6.19 zeigt wieder das Petri-Netz und den Erreichbarkeitsgraphen. Das Petri-Netz ist aus gleichen Gründen wie oben durch die Kanten (t3 , s1 )
und (t6 , s4 ) erweitert worden. Man erkennt sofort, dass lediglich das Vertauschen der Reihenfolge zu einer totalen Verklemmung führt. Im Erreichbarkeitsgraphen äußert sich das
durch einen Knoten der keine weglaufende Kante besitzt.
148
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
s1 A
t6
t1
s6
I
s2
s7
t5
t2
t3
t3
s5
II
s3
10010011
s8
00110010
t4
10001010
01010001
t2
t4
B
t1
t6
t1 t5
t4
01001000
10000101
s4
Abbildung 6.19: Das Petri-Netz und der Erreichbarkeitsgraph zu Variante II .
6.3. Graphentheoretische Analyse
Mit Hilfe von graphentheoretischen Untersuchungen lässt sich nicht nur der Nachweis der
Lebendigkeit und der Beschränktheit eines Petri-Netzes führen, sondern es lassen sich
auch Maßnahmen ableiten, um ein erkanntes Fehlverhalten eines Petri-Netzes zu verhindern. Die Verfahren beruhen dabei auf der Analyse des Überdeckungs- und Erreichbarkeitsgraphen eines Petri-Netzes. Bei der Modellierung technischer Systeme machen
unbeschränkte Petri-Netze wenig Sinn. Sie entsprächen einem System, das unendlich viele diskrete Zustände annehmen kann. Die Beschränktheit eines Petri-Netzes kann mit
Hilfe des Überdeckungsgraphen nachgewiesen werden. Hier muss natürlich die schwache
Schaltregel zugrunde gelegt werden. Die Modellierung und Analyse eines Prozesses kann
in nachfolgenden Schritten erfolgen:
(1) Modellierung des Prozesses als Petri-Netz:
(2) Konstruktion des Überdeckungsgraphen (schwache Schaltregel): Folgende
Eigenschaften sind feststellbar: Beschränktheit, Tote Transition. Ist das Netz unbeschränkt, verzweige zu (1) andernfalls zu (3).
(3) Konstruktion des Erreichbarkeitsgraphen: Folgende Eigenschaften sind feststellbar: Tote Transition, Totale Verklemmung, Erreichbarkeit, Konflikt, Kontakt.
(4) Kondensation des Erreichbarkeitsgraphen: Folgende Eigenschaften sind feststellbar: Totale Verklemmung, Partielle Verklemmung, Lebendigkeit, Reversibilität.
149
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
6.3.1. Konstruktion des Erreichbarkeitsgraphen
Einem Petri-Netz N kann ein gerichteter Graph, der Erreichbarkeitsgraph zugeordnet
werden, dessen Knoten erreichbare Markierungen M von N sind und dessen Kanten mit
schaltfähigen Transitionen beschriftet sind. Der Erreichbarkeitsgraph ist nur dann endlich,
wenn das Petri-Netz beschränkt ist. Abbildung 6.20 zeigt ein endliches Petri-Netz und
Abbildung 6.21 den zugehörigen Erreichbarkeitsgraphen.
t1
s1
t2
s2
t4
t3
s4
t5
t6
s3
t7
s5
t8
s6
Abbildung 6.20: Ein endliches Petri-Netz.
t5
100100
t3
t4
t2
t2
t4
t1
t1
110000
000110
t1
t6
010100
t6
t5
000101
t2
t8
001100
100001
t7
t7
t8
t2
t1
101000
100010
Abbildung 6.21: Erreichbarkeitsgraph zum Petri-Netz von Abbildung 6.20.
Ein einfacher Algorithmus zur Bestimmung des Erreichbarkeitsgraphen EN zum PetriNetz N basiert auf dem Suchprinzip Tiefe zuerst. Im Nachfolgenden wird der Kern des
Algorithmus kurz skizziert.
N // Menge der bereits gefundenen Knoten
program first (m) // m : Knoten des Erreichbarkeitsgraphen
{ bestimme die Menge Z der m-aktivierten Transitionen;
für alle zi ∈ Z;
{ führe zi aus;
bestimme den Knoten n zur Kante zi = (m, n);
150
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
ist n ∈
/ N dann N = N ∪ {n} , first (n) ;
mache zi rückgängig;
}
}
Die Suche wird mit dem Programm
program main (m0 ) // m0 : Anfangsmarkierung
{ N = {m0 } ;
Netz mit m0 belegen;
first (m0 ) ;
}
gestartet. Um die Eigenschaften des Petri-Netzes aus dem Erreichbarkeitsgraphen ablesen zu können, muss obiger Algorithmus noch so erweitert werden, dass auch die Kanten,
d.h., die Transitionen in entsprechender Weise abgespeichert werden. So kann man jedem
Knoten n die Menge der Paare (ti , nj ) mit ti als zu n laufenden Kante und ihren Anfangsknoten nj bzw. die Menge der Paare (ti , nj ) mit ti als von n weglaufenden Kante und
ihren Endknoten nj zuordnen.
Satz 6.4. EN sei der Erreichbarkeitsgraph eines Petri-Netzes N. Dann gilt:
(1) Eine Kante tj ist nicht in EN enthalten, genau dann ist tj eine tote Transition.
(2) EN besitzt einen Knoten M ohne auslaufende Kante, genau dann ist eine totale
Verklemmung möglich.
(3) EN besitzt einen Knoten M, genau dann ist M erreichbar, d.h., es gilt M ∈ RN (M0 ).
Um eine Konflikt- bzw. eine Kontaktsituation zu finden sind einige zusätzliche Untersuchungen nötig: Bei einer Markierung M tritt ein Konflikt auf, wenn mehrere Transitionen
M-aktiviert sind und das Schalten einer Transition mindestens einer anderen die Aktivierung entzieht. Ein Konflikt kann an einem Knoten M nur auftreten, wenn die Menge der
von M auslaufenden Kanten AM mehr als eine Transition enthält. Damit kein Konflikt
vorliegt, muss für jeden Zielknoten Mt von t ∈ AM
AM − {t} ⊂ AMt
gelten. Eine Kontaktsituation tritt auf, wenn die schwache und die starke Schaltregel zu
verschiedenen Ergebnissen führen. AM sei die Menge der von M auslaufenden Kanten nach
der starken und ĀM sei die Menge der von M auslaufenden Kanten nach der schwachen
Schaltregel. Es tritt nun kein Kontakt auf, wenn
ĀM = AM
für alle Knoten des Erreichbarkeitsgraphen EN gilt.
Auf Grund des Erreichbarkeitsgraphen von Abbildung 6.21 des Petri-Netzes nach Abbildung 6.20 kann festgestellt werden:
151
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
(1) Das Petri-Netz besitzt keine tote Transition.
(2) Eine totale Verklemmung ist möglich, durch die Schaltsequenz σ = t1 , t5 , t2 , t3 wird
sie erreicht.
(3) Konflikte:
zwischen
zwischen
zwischen
zwischen
{t5 ,
{t1 ,
{t3 ,
{t1 ,
t6 }
t3 }
t4 }
t3 , t4 }
bei
bei
bei
bei
mT
mT
mT
mT
= (1, 1, 0, 0, 0, 0)
= (0, 0, 0, 1, 1, 0)
= (0, 0, 0, 1, 1, 0)
= (0, 0, 0, 1, 1, 0)
(4) Kontakte:
bei mT = (1, 0, 0, 1, 0, 0)
bei mT = (1, 0, 0, 1, 0, 0)
bei mT = (1, 0, 0, 0, 1, 0)
mit t3
mit t2
mit t3 .
6.3.2. Die Kondensation gerichteter Graphen
Dazu werden noch einige Grundlagen aus der Graphentheorie benötigt (siehe Abbildung
6.22).
Definition 6.14. G = (X, Y ) sei ein gerichteter Graph. Eine Kantenfolge
¢
¡
z = y1 , y2 , . . . , y|Y | , yi ∈ Y , i = 1, . . . , |Y | ,
wobei yi−1 , yi einen Knoten von yi und yi , yi+1 den anderen Knoten von yi für i =
2, . . . , k − 1 gemeinsam haben, heißt Kette. Dabei bezeichnet n = l(z) die Länge der
Kette z. Die Kantenfolge z ist eine Bahn, wenn alle Kanten (Bögen) von z in ihrem
Richtungssinn durchlaufen werden. Kommt in einer Bahn keine Kante mehrmals vor, heißt
sie einfach. Eine einfache Bahn, die geschlossen ist, d.h., y1 und yn haben den Anfangsbzw. den Endknoten gemeinsam, wird Kreis genannt.
Bei Digraphen ist es von Interesse, ob Knoten durch eine Bahn verbunden werden können.
Definition 6.15. Ein Graph G = (X, Y ) heißt stark zusammenhängend, wenn jedes Paar
von Knoten durch eine Bahn verbunden werden kann. Ein maximaler, stark zusammenhängender Untergraph heißt starke Komponente.
Man überzeugt sich leicht, dass auf der Menge der Knoten eines Digraphen G = (X, Y )
die Relation R stark zusammenhängend eine Äquivalenzrelation (reflexiv, symmetrisch
und transitiv) ist. D.h., für R gilt:
R = {(x1 , x2 ) : x1 , x2 ∈ X, x1 und x2 bzw. x2 und x1 sind durch eine Bahn verbunden} .
Durch R wird eine Klasseneinteilung auf X induziert. Die Elemente einer Klasse von
R sind die Knoten einer starken Komponente. Unter der Kondensation eines Digraphen
GK = (XK , YK ) versteht man nun jenen Digraphen, dessen Knoten einer Klasse von R
entsprechen, und bei dem genau dann eine Kante von einem Knoten xK,1 zu einem Knoten
152
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
Digraph
Kette
Kreis
Bahn
Abbildung 6.22: Zu den Begriffen Kette, Bahn und Kreis.
xK,2 führt, wenn im ursprünglichen Graphen eine Bahn von einem Knoten der starken
Komponete xK,1 zu einem Knoten der starken Komponente xK,2 führt. Abbildung 6.23
zeigt einen Digraphen mit seinen starken Komponenten und seiner Kondensation.
Ein einfacher Algorithmus zur Bestimmung einer starken Komponente eines Digraphen
G = (X, Y ) besteht aus folgenden Schritten:
(1) Man wähle einen beliebigen Knoten x ∈ X und markiere ihn mit + und mit −.
(2) Man bestimme alle von x erreichbaren Knoten, wenn die Kanten in Pfeilrichtung
durchlaufen werden und markiere diese mit +.
(3) Man bestimme alle von x erreichbaren Knoten, wenn die Kanten gegen die Pfeil-
K1
K1
K2
K2
K3
K3
Abbildung 6.23: Starke Komponenten und Kondensation eines Digraphen.
153
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
richtung durchlaufen werden und markiere diese mit −.
(4) Die mit + und − markierten Knoten sind die Knoten der durch x festgelegten
starken Komponente.
Die erreichbaren Knoten kann man z.B. sehr einfach mit dem Suchprinzip Tiefe zuerst
finden. Abbildung 6.24 veranschaulicht dieses Verfahren. Es muss nun so lange wiederholt
werden, bis alle starken Komponenten gefunden sind.
Startknoten
+
Startknoten
+
+
+
+
+
+
+
+-
+
+
+-
+
+
+-
+
+
+-
Rückwärtsmarkierung
Vorwärtsmarkierung
Abbildung 6.24: Zur Bestimmung der starken Komponenten.
K
Mit Hilfe der Kondensation EN
des Erreichbarkeitsgraphen EN eines Petri-Netzes N
lassen sich einfach weitere Eigenschaften des Netzes herleiten.
Satz 6.5. Das Petri-Netz N ist genau dann reversibel, wenn der Erreichbarkeitsgraph
EN stark zusammenhängend ist.
Ebenso einfach erhält man eine hinreichende Bedingung für die Lebendigkeit eines Netzes.
Satz 6.6. Ist der Erreichbarkeitsgraph EN eines Petri-Netzes N stark zusammenhängend, und existiert zu jeder Transition t ∈ T eine Kante in EN , dann ist das Netz N
lebendig.
2
s3
s1
t1
t2
t3
t4
2
t5
s4
s
2 2
2
Abbildung 6.25: Lebendiges, nichtreversibles Petri-Netz.
154
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
Die Umkehrung muss jedoch nicht gelten. Abbildung 6.25 zeigt ein lebendiges nichtreversibles Petri-Netz und der zugehörige Erreichbarkeitsgraph mit seiner Kondensation ist in
Abbildung 6.26 dargestellt. Da die starke Komponente K2 alle Transitionen enthält ist
das Netz lebendig.
t2
t1
t2
0200
K1
1100
t1
2000
t3
t3
t1
1010
t5
t3
K2
t5
t2
t2
0110
K1
1001
0101
t3
0011
t5
t1
t4
K2
0020
Abbildung 6.26: Erreichbarkeitsgraph und Kondensation zum Petri-Netz von Abbildung
6.25.
Definition 6.16. Eine starke Komponente K des Erreichbarkeitsgraphen EN eines PetriNetzes heißt lebendig, wenn zu jeder Transition t ∈ T eine Kante in K existiert.
Damit erhält man aber sofort folgendes Kriterium.
K
Satz 6.7. Ein Petri-Netz N ist genau dann lebendig, wenn jede Senke von EN
(Knoten
ohne auslaufende Kante) lebendig ist.
155
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
K
Zum Beweis nehme man vorerst an, dass eine Senke von EN
nicht lebendig ist. Dann
existiert aber notwendigerweise eine nicht mehr aktivierbare Transition. Zum zweiten Teil
des Beweises beachte man, dass mindestens eine Markierung M und eine Transition t so
K
existieren, dass kein M 0 ∈ RN (M) die Transition t aktiviert. Also muss EN
mindestens
zwei Knoten besitzen. Ein zusammenhängender Digraph ohne starke Komponente hat
aber mindestens eine Senke.
Mit Hilfe der Kondensation lassen sich auch Verklemmungen feststellen.
K
Satz 6.8. EN sei der Erreichbarkeitsgraph eines Petri-Netzes N, EN
seine Kondensation.
K
eine nicht lebendige Senke ohne Kante, genau dann ist eine totale Ver(1) Besitzt EN
klemmung möglich.
K
eine nicht lebendige Senke mit mindestens einer Kante, genau dann ist
(2) Besitzt EN
eine partielle Verklemmung möglich.
Der Beweis dieses Satzes kann analog zum vorigen erfolgen.
t5
100100
t3
t4
t2
t2
K2
t1
t1
110000
000110
t1
t6
010100
t4
t6
K1
K2
t8
K1
t7
001100
t8
t2
101000
100010
totale Verklemmung
t2
100001
t7
t5
000101
t1
K3
partielle Verklemmung
K3
Abbildung 6.27: Kondensation des Erreichbarkeitsgraphen von Abbildung 6.21.
Abbildung 6.27 zeigt die starken Komponenten des Erreichbarkeitsgraphen von Abbildung 6.21 und die zugehörige Kondensation. Man erkennt die bereits gefundene, tote
Markierung
mT = (1, 0, 0, 1, 0, 0)
als starke Komponente K2 , die keine Kante enthält. Die starke Komponente K3 ist ebenfalls eine Senke. Da sie nicht alle Transitionen enthält, ist eine partielle Verklemmung
156
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
möglich. Das Beispiel zeigt, dass aus der Kondensation neben dem Existenznachweis von
Verklemmungen auch deren Ursachen zu entnehmen sind. So führt das Schalten von t6
auf jeden Fall zu einer partiellen Verklemmung und das Schalten von t3 zu einer totalen.
6.3.3. Konstruktion des Überdeckungsgraphen
Im Gegensatz zum Erreichbarkeitsgraphen kann der Überdeckungsgraph auch für unbeschränkte Petri-Netze konstruiert werden. In diesem Zusammenhang wird beim Überdeckungsgraphen, wie unten gezeigt wird, nur die schwache Schaltregel maßgeblich sein.
Mit diesem Konstrukt lassen sich im Folgenden zum Beispiel Aussagen über die Eigenschaft der sogenannten strukturellen Beschränktheit eines Petri-Netzes machen.
Definition 6.17. M und M 0 mit M 6= M 0 seien zwei Markierungen eines Petri-Netzes
N. M wird von M 0 überdeckt, wenn
m ≤ m0
gilt.
Für M und M 0 mit M 6= M 0 gelte
M 0 ∈ RN (M) .
Dann hat das Gleichungssystem
m0 = m + Nv
eine nichtnegative, ganzzahlige Lösung v. Wird M durch M 0 überdeckt, so ist die v
entsprechende Schaltsequenz σ auch bei M 0 anwendbar, und es folgt
m00 = m0 + Nv = m+2Nv = m+2(m0 − m).
Durch Wiederholen obiger Operation entsteht eine Folge
(mk ) = m+k(m0 − m),
(6.1)
und man sieht sofort, dass das Netz unbeschränkt ist. Die natürlichen Zahlen werden
durch die ”Zahl” ω (vergleiche + Unendlich) ergänzt, die den Rechengesetzen
ω+n = ω
ω−n = ω
für alle n ∈ N
n
< ω
ω
≤ω
genüge. Eine Folge nach Gl. (6.1) wird im Überdeckungsgraphen durch einen einzigen
Knoten m∗ mit
½
ω
falls m0i > mi
∗
i = 1, . . . , |S|
mi =
mi sonst
dargestellt, der diese Folge überdeckt. Die Grundidee bei der Konstruktion des Überdekkungsgraphen ist, solche Folgen rechtzeitig zu erkennen, und sie durch ihre Überdeckung
darzustellen. Der Überdeckungsgraph lässt sich wieder einfach mit Hilfe des Suchprinzips
Tiefe zuerst bestimmen. Dazu sind im Programm für den Erreichbarkeitsgraphen folgende
Modifikationen vorzunehmen:
157
6.3. Graphentheoretische Analyse
Kapitel 6. Steuerungstechnik Teil IV
N // Menge der bereits gefundenen Knoten
program first (m) // m : Knoten des Überdeckungsgraphen
{ bestimme die Menge Z der m-aktivierten Transitionen;
für alle zi ∈ Z;
{ führe zi aus;
bestimme den Knoten n zur Kante zi = (m, n) ;
ist (n ∈
/ N) dann N = N ∪ {n∗ } , first (n∗ ) ; // n∗i = ω falls für ein kj ∈ N
// gilt n ≥ kj und ni > kj,i
mache zi rückgängig;
}
}
Die Suche wird mit
program main (m0 ) // m0 : Anfangsmarkierung
{ N = {m0 } ;
Netz mit m0 belegen;
first (m0 ) ;
}
gestartet.
1000
s1
t1
t2
s3
t2
t3
0101
2
2
t4
t3
0120
t4
t1
t1
10ω 0
100ω
t2
s2
s4
Petri-Netz
010 ω
t4
t1
t3
t3
10ωω
t4
t4
t2
t1
t2
t4
01ωω
t3
Überdeckungsgraph
Abbildung 6.28: Das Petri-Netz und der Erreichbarkeitsgraph zu Variante II .
Abbildung 6.28 zeigt ein unbeschränktes Petri-Netz N mit dem Überdeckungsgraphen UN .
Die Kanten von UN haben dieselbe Bedeutung wie die des Erreichbarkeitsgraphen EN . Die
158
6.4. Algebraische Analyse
Kapitel 6. Steuerungstechnik Teil IV
Knoten des Überdeckungsgraphen sind jedoch nur Überdeckungen erreichbarer Knoten,
d.h., sie selbst müssen nicht erreichbar sein. Auch ist UN nicht eindeutig bestimmt.
Satz 6.9. UN sei der Überdeckungsgraph eines Petri-Netzes N.
(1) UN ist endlich.
(2) Zu jeder in N anwendbaren Schaltsequenz σ existiert eine Bahn in UN .
(3) Jede erreichbare Markierung wird von UN überdeckt.
(4) Jeder Knoten von UN überdeckt eine erreichbare Markierung.
(5) Jeder Knoten von UN ohne ω-Komponente ist eine erreichbare Markierung von N.
Aus dem Überdeckungsgraphen kann man nun schließen, ob das Petri-Netz (strukturell)
beschränkt ist oder nicht. Diese Eigenschaft gibt an, ob der Erreichbarkeitsgraph des Petrinetzes (unter der Annahme unendlich großer Kapazitäten) beschränkt bzw. unbeschränkt
ist.
Satz 6.10. UN sei der Überdeckungsgraph eines Petri-Netzes N.
(1) Wenn UN einen Knoten mit einer ω-Komponente besitzt, genau dann ist N (strukturell) unbeschränkt.
(2) Wenn UN einen Knoten mit einer Komponente mit einem Wert größer als eins
besitzt, genau dann ist N nicht sicher.
6.4. Algebraische Analyse
Alternativ zu den graphentheoretischen Methoden, basieren die algebraischen Methoden
auf Lösungen des Gleichungssystems
m − m0 = Nv ,
(6.2)
wobei nur ganzzahlige Lösungen von Bedeutung sind. Damit lassen sich aber lediglich
notwendige Bedingungen angeben.
6.4.1. Die S-Invariante
Mit Hilfe der S-Invarianten lassen sich gewisse Stellenmengen eines Petri-Netzes N charakterisieren.
Definition 6.18. Eine ganzzahlige, nichttriviale Lösung des Gleichungssystems
iTS N = 0
heißt S-Invariante.
159
6.4. Algebraische Analyse
Kapitel 6. Steuerungstechnik Teil IV
Die Bedeutung der S-Invarianten erkennt man sofort, wenn man Gl. (6.2) von links mit
iTS multipliziert. Es gilt
iTS m − iTS m0 = iTS Nv =0 .
Diese Beziehung erlaubt folgende Interpretation. In einem Netz mit einer S-Invarianten
iS bleibt auf den durch iS bestimmten Stellen, die gewichtete Summe der Marken konstant. Gilt insbesondere iS,i ∈ {0, 1}, dann bleibt die Markenanzahl dort konstant. Ist
insbesondere die S-Invariante iS positiv, d.h., es gilt iS > 0, dann muss die Markenanzahl
beschränkt sein.
Satz 6.11. Jedes Petri-Netz mit einer positiven S-Invarianten ist beschränkt.
6.4.2. Die T -Invariante
Im Gegensatz zur S-Invarianten charakterisiert die T -Invariante gewisse Mengen von
Transitionen.
Definition 6.19. Eine ganzzahlige, nichtnegative, nichttriviale Lösung des Gleichungssystems
NiT = 0
heißt T -Invariante.
Die T -Invariante gibt also die Schaltsequenz zur Reproduktion der Anfangsmarkierung
an.
Satz 6.12. Jedes reversible Petri-Netz N besitzt eine T -Invariante.
Eine T -Invariante ist also notwendig, damit der Erreichbarkeitsgraph einen Kreis enthält.
Daraus erhält man fast unmittelbar den folgenden Satz:
Satz 6.13. Jedes lebendige, beschränkte Petri-Netz N enthält eine T -Invariante.
6.4.3. Interpretationen der Invarianten
Die Netzmatrix der Fertigungsstraßen lautet
−1 0 1
1 −1 0
0 1 −1
0 0 0
N=
0 0 0
0 0 0
−1 1 0
0 −1 1
0
0
0
−1
1
0
−1
0
Die Lösung des Gleichungssystems
iTS N = 0
160
0
0
0
0
−1
1
1
−1
0
0
0
1
.
0
−1
0
1
6.4. Algebraische Analyse
ist
Kapitel 6. Steuerungstechnik Teil IV
1
0
0
0
1
0
1
0
1
0
0
1
0
1
0
+ λ2 + λ3 + λ4 0
iS = λ1
0
1
1
0
0
1
0
1
0
0
1
0
0
0
0
1
für λ1 , λ2 , λ3 , λ4 ∈ Z .
Wählt man z.B. λ1 = λ2 = λ3 = λ4 = 1, dann sieht man sofort, dass das Netz beschränkt
ist. Durch Lösen des Gleichungssystems
I SI
I SII
s1 A
t1
t4
t2
s3
s5
I SIV
s7
s2
s6
s8
t3
s4
t4
s7
s5
t2
t5
ISIII
B
t1
s7
s2
s1 A
s4
B
t5
s3
s8
s6
s8
t3
I TI
t6
I TII
Abbildung 6.29: Zur Interpretation der S- und T -Invarianten.
NiT = 0
erhält man die T -Invarianten. Die nichtnegativen Lösungen sind durch
1
0
1
0
1
+ λ2 0
für λ1 , λ2 ∈ N
iT = λ1
0
1
0
1
0
1
gegeben. Damit ist aber eine Voraussetzung für die Reversibilität erfüllt.
161
t6
6.5. Literatur
Kapitel 6. Steuerungstechnik Teil IV
S- und T -Invariante erlauben noch weitere Interpretationen, wie dies Abbildung 6.29 zu
entnehmen ist. S-Invarianten bezeichnen Stellenmengen, für die die gewichteten Markensummen konstant bleiben. So beziehen sich die Mengen ISI = {s1 , s2 , s3 }, ISII =
{s4 , s5 , s6 } auf den Durchlauf der Werkstücke auf den Fertigungsstraßen und die Mengen
ISIII = {s2 , s5 , s7 }, ISIV = {s3 , s6 , s8 } auf den Einsatz der Handhabungsgeräte.
Mit T -Invarianten werden Schaltsequenzen beschrieben, die Markierungen reproduzieren.
Sie können als kleinste, eigenständige Funktionseinheiten angesehen werden. So beziehen sich die Mengen IT I = {t1 , t2 , t3 } und IT II = {t4 , t5 , t6 } auf die jeweils getrennten
Fertigungsprozesse.
Abschließend bleibt zu bemerken, dass hier Gleichungssysteme mit ganzzahligen Koeffizienten auftreten, wobei nur die ganzzahligen oder gar die ganzzahligen und nichtnegativen
Lösungen interessieren. Numerische Verfahren zur Lösung solcher Systeme findet man
unter anderem bei der linearen, ganzzahligen Programmierung.
6.5. Literatur
1. Abel D.: Petri-Netze für Ingenieure, Springer Verlag, 1990.
2. Hanisch H. M.: Petri-Netze in der Verfahrenstechnik, Oldenbourg Verlag, 1992.
3. Koenig R., Quaeck L.: Petri-Netze in der Steuerung- und Digitaltechnik, Oldenbourg Verlag, 1988.
4. Reisig W.: Petrinetze, Eine Einführung, Springer Verlag, 1991.
162