Axiomatische Beschreibung der Euklidischen Geometrie
Werbung

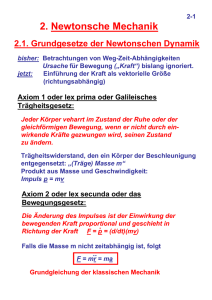
Axiomatische Beschreibung der
Euklidischen Geometrie
Honermann, Klee
Wintersemester 2016/2017
Inhaltsverzeichnis
1 Einleitung
3
1.1
Hintergrund . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2
Grundaussagen Euklids für alle Wissenschaften
1.3
Der Punktbegri
1.4
Die geometrische Ebene
. . . . . . . . . . . . . . . . . . . . .
5
1.5
Schreibweise der Zwischenrelation . . . . . . . . . . . . . . . .
6
. . . . . . . .
4
. . . . . . . . . . . . . . . . . . . . . . . . .
5
2 Die Anordnungsaxiome
8
2.1
Axiom A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
8
2.2
Axiom A2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3
Axiom A3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.4
Axiom A4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.5
Axiom A5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.6
Axiom A6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
2.7
Denition: Strecke
. . . . . . . . . . . . . . . . . . . . . . . .
10
2.8
Denition: Gerade
. . . . . . . . . . . . . . . . . . . . . . . .
11
2.9
Bemerkung
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Die unabhängige Zwischenrelation
2.10 Denition: Parallelität
8
. . . . . . . . . . . . . . . . . . . . . .
12
2.11 Axiom A7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.12 Axiom A8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.13 Bemerkung und Denitionen:
. . . . . . . . . . . . . . . . . .
15
2.13.1 Denition: Halbgerade . . . . . . . . . . . . . . . . . .
15
2.13.2 Denition: Halbebene
. . . . . . . . . . . . . . . . . .
16
. . . . . . . . . . . . . . . . . . . .
17
2.13.3 Denition: Dreieck
3 Kongruenzaxiome
18
3.1
Denition: Distanzfunktion
. . . . . . . . . . . . . . . . . . .
18
3.2
Axiom M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
3.3
Axiom M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
3.4
Axiom M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
3.5
Axiom M4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
3.6
Denitionen: Isometrie und Kongruenz . . . . . . . . . . . . .
22
3.7
Bemerkung
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.8
Axiom M5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.9
Axiom M6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.10 Satz: Zwischenrelation des Mittelpunkts
. . . . . . . . . . . .
24
3.11 Denitionen: Winkel und -kongruenz . . . . . . . . . . . . . .
25
3.12 Kongruenzsatz: SWS . . . . . . . . . . . . . . . . . . . . . . .
26
3.13 Denition: Nebenwinkel und rechter Winkel . . . . . . . . . .
27
3.14 Denition: Lot
28
. . . . . . . . . . . . . . . . . . . . . . . . . .
3.15 Denition: Gegenwinkel
. . . . . . . . . . . . . . . . . . . . .
1
28
3.16 Satz: Gegenwinkelkongruenz . . . . . . . . . . . . . . . . . . .
29
3.17 Satz: Parallelenexistenz
30
. . . . . . . . . . . . . . . . . . . . .
2
1
Einleitung
1.1 Hintergrund
Bereits sehr früh in ihrer Entwicklungsgeschichte haben sich die Menschen
mit Geometrie beschäftigt. Bereits in alten ägyptischen Aufzeichnungen werden Fragen zu Dreiecken und Kreisen behandelt. Die ersten Versuche bekannte, intuitiv gefundene Zusammenhänge zu beweisen, machte der griechische
Philosoph
Thales von Milet (etwa 624 - 547 v. Chr.). Er bewies meh-
rere geometrische Sätze, wobei es vielmehr wichtig ist zu beachten, dass er
erstmals eine Methode des Beweisens entwickelte.
Beim beweisen mathematischer Sätze nutzt man vorher bewiesene oder
getroene Aussagen aus denen man Neues ableitet. Auf diese Aussagen lassen
sich die Sätze dann auch zurückführen. Die Beweisnotwendigkeit der Sätze
besteht in der Selbstverständlichkeit, die für jede Person unterschiedlich ist
und hinterfragt werden kann. Somit sind aber bestimmte Aussagen nötig,
die zu Beginn bestehen und auf denen die Beweise fuÿen. Diese nennt man
auch
Grundaussagen (Axiome)
. Sie werden als gegeben angesehen und aus
ihnen sind die anderen geometrischen Eigenschaften und Sätze ableitbar.
Viele Jahre später schrieb der griechische Mathematiker
Alexandria
(ca. 365 - 300 v. Chr.) sein berühmtes Werk
Euklid von
Elemente ,
welches das Wissen der damaligen griechischen Mathematik zusammenfasst.
Man sagt, die Elemente seien neben der Bibel das am zweithäugsten gedruckte Buch mit mehr als 1000 Auagen. Sie bestehen aus 13 Büchern,
welche mitunter den ersten Versuch beinhalten, die Geometrie als theoretisches System darzustellen. Das Werk zeigt erstmals den Aufbau der gesamten
Mathematik der Zeit, wobei die Aussagen aus einem begrenzten Vorrat von
Denitionen, Postulaten und Axiomen hergeleitet und bewiesen werden.
Die Grundlagen lassen sich so auch in diese drei Kategorien aufteilen, wobei
Denitionen
Axiome GrundPostulate Grundaussagen auf die spe-
die Erklärungen der auftretenden Begrie,
aussagen aller Wissenschaften und die
zielle Geometrie sind.
Ebenfalls wichtig zu beachten ist der signikante Unterschied zur analytischen Darstellung von geometrischen Elementen. Diese ist hauptsächlich
bekannt, da sie in den Schulen den Groÿteil der Unterrichtszeit genutzt wird.
Schülerinnen und Schüler lernen den axiomatischen Aufbau der Geometrie
selten bis gar nicht kennen und lassen sich im Allgemeinen von dem Glauben leiten, die Geometrie sie der leichteste Bereich der Mathematik, da man
sich hierzu alles genau vorstellen und aufmalen kann. Dabei fördert gerade
die algebraische Herangehensweise an die Geometrie das Verständnis, was
überhaupt z.B. eine Strecke oder Gerade ist und stellt grundlegende Fragen,
wie z.B. ob es wirklich immer eine Parallele zu einer Geraden gibt oder was
überhaupt gerade bedeutet.
3
In den folgenden Kapiteln geht es um diesen systematisierenden Aufbau
der euklidischen Geometrie. Dabei treten die eigentlichen Axiome Euklids
nur zu Beginn zusammengefasst auf und die Postulate, welche ja den Bezug
zur Geometrie ziehen, werden hier als Axiome bezeichnet. Diese Vorstellung zeigt nur ein mögliches Axiomensystem für eine absolute geometrische
Ebene, es existieren viele unterschiedliche, jedoch äquivalente Zugänge. Unterschiede nden sich beispielsweise darin, ob zuerst eine
oder die Begrie
Punkt
Anordnungsaxiome
Das
und
Gerade
Zwischenrelation
eingeführt werden. Danach folgen die
.
Parallelenaxiom
ist kein Teil der absoluten Geometrie, es zeichnet
euklidische Ebene unter den geometrischen Ebenen aus. Seine Modikation führt zur nichteuklidischen Elementargeometrie und ist somit nicht hier
enthalten.
1.2 Grundaussagen Euklids für alle Wissenschaften
Die hier aufgeführten Aussagen sind, wie oben erwähnt, die eigentlich als
Axiome bezeichneten:
1. Dinge, die demselben Ding gleich sind, sind einander gleich.
2. Fügt man zu Gleichem Gleiches hinzu, so sind die Summen gleich.
3. Nimmt man von Gleichem Gleiches hinweg, so sind die Reste gleich.
4. Was zur Deckung miteinander gebracht werden kann, ist einander gleich.
5. Das Ganze ist gröÿer als sein Teil.
4
1.3 Der Punktbegri
Geschichtliche gesehen gab es viele unterschiedliche Punktbegrie und Versuche diesen zu denieren. Um dies zu zeigen sind hier einige aufgeführt:
Plato
Aristoteles
(ca. 380 v. Chr.):
Ein Punkt ist der Anfang einer Linie.
(ca. 340 v. Chr.):
die eine Position besitzt.
Euklid
Heron
(ca. 325 v. Chr.):
Ein Punkt ist eine unteilbare Einheit,
Was keine Teile hat, ist ein Punkt.
Ein Punkt ist, was keine Teile hat oder eine
Begrenzung ohne Dimension oder die Grenze einer Linie.
(ca. 50 n. Chr.):
Simplicus
Punkte sind Anfänge von Gröÿen
und das, woraus diese erwachsen. Weiterhin sind Punkte die einzigen
Objekte, die über eine Position verfügen.
(ca. 6. Jh. n. Chr.):
Wenn man die letzte Bezeichnung genauer betrachtet, fällt schnell der vorher noch nicht erschienene Begri der Position auf. Dieser deutet schon auf
eine analytische Beschreibung der Objekte, was unterstützt wird durch die
zeitliche Entfernung zu den anderen Versuchen.
Ebenso zeigt sich, dass keine exakte Denition möglich ist, eher nur eine
Beschreibung. Das liegt daran, das man an dieser Stelle noch keine weiteren
Oberbegrie oder Eigenschaften hat, um das Objekt zu beschreiben. Hier
trit die Beschreibung aus dem Nichts denieren zu, die Eigenschaft wird
also gefordert.
Neben diesen Punktbeschreibungen wird eine
Eine Länge ohne Breite ist eine Linie.
Linie
beschrieben mit:
1.4 Die geometrische Ebene
Bevor wir beginnen uns mit dem ersten Axiomen auseinanderzusetzen, muss
die Ebene auf der wir uns dabei benden beschrieben werden.
Die
geometrische Ebene
•
•
einer Menge
einer Menge
aus
P
in
Z,
P,
besteht aus:
deren Elemente wir
Z ⊂ P × P × P.
Punkte
nennen.
Liegt das Tripel (A,B,C) von Punkten
so werden wir davon sprechen, dass der Punkt B zwischen
den Punkten A und C liegt.
Letzteres Teil (Z ) wird auch als
Zwischenrelation bezeichnet.
5
1.5 Schreibweise der Zwischenrelation
Nach der Einführung der Zwischenrelation oben, folgt hier kurz die später
genutzte mathematische Schreibweise:
Ist das Tripel (A,B,C) mit A,B,C
∈P
in
Z
enthalten, schreiben kann man
auch schreiben:
(A,B,C)
In
∈Z
Abb. 1 und 2 werden beispielhaft die Punkte A,B,C ∈ (P ) auf der Ebene
und in
Z
dargestellt.
[Abb.1]
6
[Abb.2]
Es folgt nach dem ersten Anordnungsaxiom noch eine weitere Schreibweise.
7
2
Die Anordnungsaxiome
Die erste Axiomgruppe, die sog.
der Teilmenge
(Z)
(der
Anordnungsaxiome
Zwischenrelation
xiert die Eigenschaft
). Es wird also der Begri zwi-
schen erstmalig deniert als Beziehung zwischen
drei Punkten. Die Axiome
sind unabhängig voneinander, wobei nicht immer alle gelten.
2.1 Axiom A1
Es existieren drei verschiedene Punkte
ordnung in der Zwischenrelation
Z
A0 , B0 , C0 ∈ P
Dieses Axiom drückt aus, dass die Dimension von
(Siehe auch
welche in keiner An-
liegen.
P
mindestens zwei beträgt.
[Abb.1])
Wie vorher erwähnt setzen wir hier nun eine Bezeichnung zur weiteren Schreibweise der Zwischenrelation ein:
Die unabhängige Zwischenrelation
Es seien A,B,C
∈ P
der Zwischenrelation
Punkte so, dass sie in einer beliebigen Anordnung in
Z
stehen. Somit liegt einer der Punkte zwischen den
anderen. Das nennt man die
unabhängige Zwischenrelation . Diese kann man
schreiben als:
[A, B, C] ∈ Z
Analog dazu gilt:
[A, B, C] ∈
/ Z,
wobei hier keine Anordnung der Punkte A,B,C in der Zwischenrelation
Z
steht.
2.2 Axiom A2
Liegt einer der Punkte A,B,C zwischen den anderen, so sind die drei Punkte
verschieden.
∀A, B, C ∈ P :
[A, B, C] ∈ Z ⇒ A 6= B 6= C 6= A
Wenn zwei Punkte nicht verschieden sind, sind sie gleich.
8
2.3 Axiom A3
Zu je zwei verschiedenen Punkten A und B, existiert ein Punkt C derart,
dass B zwischen A und C liegt.
∀A, B ∈ P ∃C ∈ P : (A, B, C) ∈ Z
Es existiert eine Zwischenrelation.
Es existiert sogar
mindestens
ein Punkt. (Eigentlich ist es je nach Punktmenge
sogar nicht unwahrscheinlich, dass unendlich viele Punkte existieren, die in Zwischenrelation stehen zu zwei anderen beliebigen Punkten.)
[Abb.3]
2.4 Axiom A4
Liegt B zwischen A und C, so liegt B gleichfalls zwischen C und A.
Dies ist vergleichbar mit einer Symmetrie der Relation
ren Punkten im Tripel der Zwischenrelation.
[Abb.4]
9
Z,
hier mit den äuÿe-
2.5 Axiom A5
Sind A,B,C drei Punkte aus
P,
so liegt höchstens einer dieser Punkte zwi-
schen den anderen.
∀A, B, C ∈ P :
¯
[A, B, C] ∈
/Z ∨
¯
¯ (A, C, B) ∈ Z
(A, B, C) ∈ Z ∨ (B, A, C) ∈ Z ∨
Es existiert also höchstens eine Zwischenrelation zwischen drei Punkten (unter
Beachtung der Symmetrie).
Dieses Axiom gilt aber vor allem, weil erst drei Punkte benötigt werden, damit
einer zwischen den anderen liegen kann.
2.6 Axiom A6
Liegt einer der Punkte A,B,C zwischen den beiden anderen und einer der
Punkte A,B,D auch zwischen den beiden anderen (A,B,C,D∈
P ),
so liegt
einer der Punkte B,C,D gleichfalls zwischen den beiden anderen.
∀A, B, C, D ∈ P :
[A, B, C] ∈ Z ∧ [A, B, D] ∈ Z ⇒ [B, C, D] ∈ Z
Dabei gilt A2 (Symmetrie).
[Abb.5]
als Beispiel
Ausgehend von diesen Axiomen wird deniert:
2.7 Denition: Strecke
Seien A,B
∈P
zwei verschiedene Punkte. Die
Strecke AB
und allen zwischen A und B liegenden Punkten.
∀A, B ∈ P :
AB := {A, B} ∪ {C ∈ P|(A, C, B) ∈ Z}
10
besteht aus A,B
In Bezug zu A3:
Angenommen wir benden uns im
R2 ,
dann existieren unendliche viele Punkte
in AB, also zwischen A und B.
[Abb.6]
2.8 Denition: Gerade
Seien A,B
∈P
zwei verschiedene Punkte. Die Gerade
A,B und allen Punkten C
∈P
G(A, B)
besteht aus
mit der Eigenschaft, dass unter den Punkten
A,B,C einer zwischen den beiden anderen liegt.
∀A, B ∈ P :
G(A, B) := {C ∈ P|[A, B, C] ∈ Z} ∪ {A, B}
G(A, B)
besteht also aus allen Punkten auf der Strecke AB, sowie den Punkten
die auf den Verlängerungen der Strecke über A und B hinaus liegen.
[Abb.7]
Sowohl Strecke als auch Gerade sind Mengen von Punkten.
Auÿerdem ist in der Denition der Gerade enthalten, dass Punkte in Zwischenrelation auch auf einer gemeinsamen Geraden liegen.
11
2.9 Bemerkung
Aus A3 und A6 lässt sich folgern:
•
Durch je zwei verschiedene Punkte verläuft genau eine Gerade.
•
Zwei Geraden schneiden sich höchstens in einem Punkt, sonst sind sie
identisch.
2.10 Denition: Parallelität
Zwei Geraden
G
und
G0
heiÿen
Durchschnitt haben, also
parallel , falls sie gleich sind oder einen leeren
G ∩ G 0 = ∅.
[Abb.8]
12
2.11 Axiom A7
∈ P drei verschiedene, in keiner Zwischenrelation stehende Punk∈ P ein Punkt der Strecke AB, sowie T ein Punkt der Geraden
G(A, C), welcher nicht in der Strecke AC liegt, so enthält die Gerade G(S, T )
Sind A,B,C
te und sind S
mindestens einen Punkt der Strecke BC.
∀A, B, C ∈ P, [A, B, C] ∈
/ Z, S ∈ AB, T ∈ G(A, C) \ AC :
∃R ∈ G(S, T ) : R ∈ BC
[Abb.9]
[Abb.10]
13
2.12 Axiom A8
Sind A,B,C
∈P
drei in keiner Zwischenrelation stehende, verschiedene Punk-
4(A, B, C)
Ebene P .
te, so ist die Vereinigung aller Geraden, welche eine Ecke des Dreiecks
und einen Punkt der zugehörigen Gegenseite enthalten, gleich der
∀A, B, C ∈ P, [A, B, C] ∈
/Z:
P=
S
G(A, S) ∪
S∈BC
S
G(B, T ) ∪
T ∈AC
U ∈AB
[Abb.11]
Mit A1 (dim
P ≤ 2)
zeigt A8, dass dim
14
S
P = 2.
G(C, U )
2.13 Bemerkung und Denitionen:
Mit den Anordnungsaxiomen lassen sich die Begrie Halbgerade, Halbebene und Dreieck denieren.
2.13.1 Denition: Halbgerade
Eine Gerade wird durch jeden ihrer Punkte in zwei
Sei
G
eine Gerade in
P,
Halbgeraden
dann existiert ein beliebiger Punkt P
Gerade teilt und ein weiterer, fester Punkt B
identizieren wird) so, dass für alle weiteren
geteilt.
∈ G,
der die
∈ G \ {B} (welcher eine Seite
Punkte A ∈ G \ {P, B} genau
eine der folgenden Zwischenrelationen gilt:
(P, A, B) ∈ Z
¯ (P, B, A) ∈ Z
∨
¯ (A, P, B) ∈ Z
∨
Das A in einer Zwischenrelation steht folgt aus der Geradendenition 2.8.
Die Eindeutigkeit gilt nach A5.
[Abb.12]
Man kann sagen: B liegt auf der einen Seite der Gerade, somit auf einer
der Halbgeraden. So kann man die Halbgeraden denieren als:
P~B := {A ∈ G | (P, A, B) ∈ Z ∨ (P, B, A) ∈ Z} ∪ {B}
P~B 0 := {A ∈ G | (A, P, B) ∈ Z}.
Dabei liegt B in
P~B .
[Abb.12.1]
Je nach Ansicht kann man mit kleiner Änderung P den Halbgeraden hinzufügen.
15
2.13.2 Denition: Halbebene
Jede Gerade zerlegt die Ebene
Für eine Gerade
G
P
in zwei
beliebigen, fest gewählten Punkt P
Halbebenen dann mit
χ0 (G, P )
Halbebenen
.
kann man die Seiten (wie bei den Halbgeraden) mit einem
χ(G, P )
∈ P identizieren. Bezeichnet werden die
χ0 (G, P ), wobei P auf der Halbebene
und
liegen soll. Folgend können die Halbebenen deniert werden:
χ(G, P ) := {A ∈ P | ∃R ∈ G : (A, R, P ) ∈ Z},
χ0 (G, P ) := P \ [χ(G, P ) ∪ G].
[Abb.13]
Ob die Gerade selbst zu den Halbebenen gehört ist wieder Ansichtssache und
kann schnell geändert werden.
16
2.13.3 Denition: Dreieck
Sind A,B,C
∈P
drei nicht auf einer Gerade liegende Punkte, so heiÿen die
Strecken AB, BC, AC die
Seiten des Dreiecks
. Die im Dreieck liegenden
Punkte sind diejenigen Punkte der geometrischen Ebene, welche auf einer
Strecke von einem Eckpunkt A zu einem Punkt P
∈
BC der Gegenseite
liegen.
Somit wird erst einmal ausgesagt:
∀A, B, C ∈ P, [A, B, C] ∈
/Z:
∃4(A, B, C),
wobei A,B,C vertauschbar
Das Dreieck denieren wird dann als alle Punkte, die innerhalb der Strecken
zwischen den Eckpunkten liegen:
4(A, B, C) := AB ∪ BC ∪ AC
[Abb.14]
17
3
Kongruenzaxiome
Die folgende Axiomgruppe, die sog.
Messens
und der
Stetigkeit
Kongruenzaxiome,
sind die Axiome des
. Dabei bedienen wir uns der Sprache der
metrischen Topologie . Es gilt ab hier die Denition der Halbgerade mit dem
vorher die Gerade teilenden Punkt enthalten. Die Axiome sind ebenfalls
unabhängig voneinander, wobei nicht immer alle gelten.
3.1 Denition: Distanzfunktion
Um die Ebene metrisch betrachten zu können benötigen wir zuerst die Distanzfunktion, die den
Abstand zweier Punkte
ausgibt:
d : P × P −→ R1+ = [0, ∞)
Die Zahl
d (A,B)
nennen wir den
Abstand des Punktes A zum Punkt B
. Die
Funktion wird weiterhin durch 3 Forderungen deniert, die nun folgen.
Der Abstand
d (A,B) verschwindet genau dann, falls die Punkte A = B gleich
sind.
∀A, B ∈ P :
Weiterhin sei der Abstand
der
Dreiecksungleichung
d (A, B) = 0 ⇔ A = B
symmetrisch
,
d (A,B)
=
d (B,A)
und genüge
:
∀A, B, C ∈ P :
d (A, B) ≤ d (A, C) + d (C, B)
[Abb.15]
Die längste Seite eines Dreiecks ist kürzer oder gleichlang als die Summe der
anderen beiden Seiten.
18
3.2 Axiom M1
∀A, B, C ∈ P :
Der Punkt C liegt in Strecke AB genau dann, wenn:
C ∈ AB ⇔ d (A,B)
=
d (A,C)
+
d (C,B)
[Abb.16]
Jeder Punkt auf der Strecke teilt diese in Teilstrecken, somit lässt sich jede
Strecke in Teilstrecken zerlegen, die Summe der Teilstrecken ergibt dann wieder
die Strecke. Es gilt auch:
(A, C, B) ∈ Z ⇔ d (A,B)
=
d (A,C)
+
d (C,B).
3.3 Axiom M2
Das Paar (P ,d ) ist ein
vollständiger metrischer Raum
D.h., dass jede Cauchy-Folge in
P
.
gegen einen bestimmten Punkt in
P
konver-
giert. Somit gibt es keine Löcher im metrischen Raum. Das wird nach M6 auch
noch klarer weitergeführt.
3.4 Axiom M3
G und G 0 zwei sich in einem Punkt P schneidende Geraden. Weiterhin
0
seien A, A1 ∈ G und B, B1 ∈ G jeweils zwei Punkte auf diesen Geraden
0
derart, dass P zwischen A, A1 auf G und B, B1 auf G liegt. Gilt d (P,A) =
d (P,A1 ) und d (P,B) = d (P,B1 ), so folgt d (A,B) = d (A1 , B1 ).
Seien
G, G 0 ⊂ P Geraden, G ∩ G0 = P ∈ P ,
A, A1 ∈ G, B, B1 ∈ G 0 , (A, P, A1 ), (B, P, B1 ) ∈ Z :
d (P,A)
d (P, A1 ) ∧ d (P, B) = d (P, B1 )
⇒ d (A, B) = d (A1 , B1 )
=
19
[Abb.17]
P ist Mittelpunkt der Strecken
AA1
und
20
BB1 .
3.5 Axiom M4
∈ P drei verschiedene, nicht in Zwischenrelation stehende Punkte
A1 , B1 ∈ P zwei weitere Punkte mit d (A,B) = d (A1 , B1 ), so existiert ein
weiterer Punkt C1 ∈ P mit d (A,C) = d (A1 , C1 ) und d (B,C) = d (B1 , C1 ).
Sind A,B,C
und
∀A, B, C, A1 , B1 ∈ P, [A, B, C] ∈
/ Z,
d (A, B) = d (A1 , B1 ):
∃C1 ∈ P : d (A, C) = d (A1 , C1 ) ∧ d (B, C) = d (B1 , C1 )
[Abb.18]
Mithilfe vor allem des letzten Axioms lässt sich nun eine bestimmte Art
Abbildungen beschreiben, die Abstände zwischen mehreren Punkten erhält.
21
3.6 Denitionen: Isometrie und Kongruenz
Eine
Isometrie der geometrischen Ebene P
f : P → P,
ist eine
bijektive Abbildung
die den Abstand zwischen den Punkten enthält, d.h.:
∀A, B ∈ P :
d (f (A),f (B))
f ∈ Iso(P),
=
d (A,B)
der Menge aller Isometrien über
Zwei Teilmengen von
P
heiÿen
kongruent
P
, falls eine Isometrie existiert, die
diese Mengen bijektiv aufeinander abbildet.
M, M 0 ⊆ P
kongruent
⇔ ∃f ∈ Iso(P) : f (M ) = M 0
3.7 Bemerkung
Neben der Abstandserhaltung gilt für Isometrien auch die Erhaltung der
Zwischenrelation
Z.
∀A, B, C ∈ P, f ∈ Isom(P) :
(A, B, C) ∈ Z ⇔ (f (A), f (B), f (C)) ∈ Z
3.8 Axiom M5
Sind A,B,C und
A1 , B1 , C1
jeweils drei Punkte aus
P
und es gilt d(A,B)
= d(A1 , B1 ), d(A,C) = d(A1 , C1 ) und d(B,C) = d(B1 , C1 ), so existiert ein
Isometrie
f ∈ Iso(P)
mit
f (A)=A1 , f (B)=B1
und
f (C)=C1 .
∀A, B, C, A1 , B1 , C1 ∈ P,
d (A, B) = d (A1 , B1 ), d (A, C) = d (A1 , C1 ), d (B, C) = d (B1 , C1 ) :
∃f ∈ Iso(P) :
f (A) = A1 , f (B) = B1 , f (C) = C1
22
[Abb.19]
Dieses Axiom ist äquivalent zum Kongruenzsatz SSS. Der Kongruenzsatz erhält
also das Dreieck:
f (4(A, B, C)) = 41 (A1 , B1 , C1 ).
3.9 Axiom M6
Für die Gerade
A1 , A2 ∈ G
G,
so, dass
∈ G und t∈ R>0
d (P, A1 ) = d (P, A2 ) = t.
Punkt P
gibt es genau zwei Punkte
Gerade G ⊂ P :
∀P ∈ G ∀t ∈ R>0 ∃!A1 , A2 ∈ G : d (P, Ai ) = t
Den Punkt P nennt man so auch
Mittelpunkt von A1 A2
[Abb.20]
23
(Strecke).
3.10 Satz: Zwischenrelation des Mittelpunkts
Zu zwei Punkten
A1 , A2
Zwischenrelation so, dass
Beweis:
G ⊂P
(A1 , P, A2 ) ∈ Z .
auf Gerade
gilt für den Mittelpunkt P die
Der Beweis kann sich alleine durch die Tatsache ergeben, dass P
auf der Strecke zwischen
A1
und
A2
liegen sollte (P ist schlieÿlich Mittel-
punkt dieser Strecke).
A1 , A2
Da die zwei Punkte
Geradendenition
G
liegen, muss nach der
2.8 eine der folgenden Zwischenrelationen gelten:
(A1 , P, A2 ) ∈ Z
Nach
und der Punkt P auf
¯ (P, A1 , A2 ) ∈ Z
∨
¯ (P, A2 , A1 ) ∈ Z
∨
M1 gilt dabei:
(P, A1 , A2 ) ∈ Z ⇔ d (P, A2 ) = d (P, A1 ) + d (A1 , A2 ), bzw.
(P, A2 , A1 ) ∈ Z ⇔ d (P, A1 ) = d (P, A2 ) + d (A2 , A1 ).
(P, A1 , A2 ) ∈ Z und (P, A2 , A1 ) ∈ Z , da
d (P, A1 ) = d (P, A2 ), aber zusätzlich 3.1 besagt, dass
d (A1 , A2 ) 6= 0, wegen der Verschiedenheit von A1 und A2 .
Hier folgt ein Widerspruch für
nach
M6
schon gilt
Beweis (math. Schreibweise):
P, A1 , A2 ∈ G ,
2.8:
⇒ (A1 , P, A2 ) ∈ Z
¯ (P, A1 , A2 ) ∈ Z
∨
¯ (P, A2 , A1 ) ∈ Z
∨
M1:
(P, A1 , A2 ) ∈ Z ⇔ d (P, A2 ) = d (P, A1 ) + d (A1 , A2 ), bzw.
(P, A2 , A1 ) ∈ Z ⇔ d (P, A1 ) = d (P, A2 ) + d (A2 , A1 ).
M6: d (P, A1 ) = d (P, A2 )
3.1: A1 6= A2 ⇔ d (A1 , A2 ) 6= 0
Hierauf folgend kann man sagen, dass in jedem vollständigen metrischen
Raum ein Mittelpunkt zwischen zwei beliebigen Punkten existiert mit den
Eigenschaften aus M6 und dem letztem Satz.
24
3.11 Denitionen: Winkel und -kongruenz
Ein sog.
Winkel ](h, k )
besteht aus einem Scheitelpunkt S
aus ihm herauslaufenden Halbgeraden
h
und
∈ P,
sowie zwei
k.
[h, k ⊂ P, h ∩ k = {S}]
[Abb.21]
Schreibweise:
Wählt man beliebige Punkte A∈
h
Halbgeraden, kann man Winkel auch umschreiben:
](h, k) = ](A, S, B) = ](B, S, A).
25
und B∈
k
auf den
Zwei Winkel
existiert, welche
](h, k ) und ](h 0 , k 0 ) sind kongruent
h in h 0 und k in k 0 überführt.
, falls eine Isometrie
[Abb.22]
3.12 Kongruenzsatz: SWS
4(A, B, C) und 41 (A1 , B1 , C1 ) zwei Dreiecke mit d (A, B) = d (A1 , B1 ),
d (A, C) = d (A1 , C1 ) und ](B, A, C) = ](B1 , A1 , C1 ).
Dann ist auch: d (B, C) = d (B1 , C1 ) und somit nach SSS 4(A, B, C) kongruent zu 41 (A1 , B1 , C1 ).
Seien
Beweis:
4(A, B, C) auf 41 (A1 , B1 , C1 ) ab, dass A auf A1 liegt
A1 B1 .
Da d (A, B) = d (A1 , B1 ), muss auch B auf B1 liegen.
Mit ](B, A, C) = ](B1 , A1 , C1 ) liegt entweder AC auf A1 C1 oder AC ist
A1 C1 an A1 B1 gespiegelt. Wir legen AC auf A1 C1 , sodass mit d (A, C) = d (A1 , C1 )
auch C auf C1 liegt.
So ist auch d (B, C) = d (B1 , C1 ), also 4(A, B, C) kongruent zu 41 (A1 , B1 , C1 ).
Man lege
und AB auf
26
3.13 Denition: Nebenwinkel und rechter Winkel
Es sei
](h, k ) ein Winkel. Wird die Halbgerade h durch h1 zu einer Geraden
](k , h1 ) auch einen Nebenwinkel zu ](h, k ).
ergänzt, nennt man
[Abb.23]
Ein
rechter Winkel ist derjenige Winkel, der kongruent zu seinem Neben-
winkel ist.
[Abb.24]
27
3.14 Denition: Lot
Aus der Denition des rechten Winkels folgt:
L=
6 G,
die den Punkt P enthält und deren (von P ausgehenden Halbgeraden) l1 , l2
im rechten Winkel zu G stehen. Man nennt ein l auch Lot von G auf P.
Es gilt, dass alle (kleinsten) Winkel zwischen G und L rechte Winkel sind.
Zu jedem Punkt
P ∈P
auf einer Gerade
G⊂P
existiert eine Gerade
[Abb.Lot]
3.15 Denition: Gegenwinkel
Es sei
](h, k)
ein Winkel. Werden beide Halbgeraden h,k durch
zu Geraden ergänzt, nennt man
](h1 , k1 )
[Abb.25]
28
auch den
Gegenwinkel
h1
zu
k1
](h, k).
und
3.16 Satz: Gegenwinkelkongruenz
Es sei
](h, k)
ein Winkel und
](h1 , k1 )
sein Gegenwinkel. Dann gilt Kon-
gruenz zwischen den Winkeln.
Beweis:
h, h1 ; k, k1 bilden zusammen die Geraden H, K
mit Schnittpunkt H ∩ K = {P }.
Wir wählen Punkte A ∈ h ⊂ H, A1 ∈ h1 ⊂ H, B ∈ k ⊂ K, B1 ∈ k1 ⊂ K
so, dass: d (P,A) = d (P,A1 ) und d (P,B) = d (P,B1 ).
Die Halbgeraden
Dann gilt nach
d (A,B)
=
M3 :
d (A1 , B1 ).
Dabei sind die Winkel nach ihrer Denition jetzt auch schreibbar als:
](h, k) = ](A, P, B), ](h1 , k1 ) = ](A1 , P, B1 ).
Nach M5 sind dann die Dreiecke 4(P, A, B) und 4(P, A1 , B1 )
und somit auch die Winkel ](A, P, B), ](A1 , P, B1 ).
kongruent
Beweis (math. Schreibweise):
h ∪ h1 ∪ {P } = H, k ∪ k1 ∪ {P } = K, H ∩ K = {P };
A ∈ h ⊂ H, A1 ∈ h1 ⊂ H, B ∈ k ⊂ K, B1 ∈ k1 ⊂ K so,
dass: d (P,A) = d (P,A1 ) und d (P,B) = d (P,B1 ).
M3: d (A,B) = d (A1 , B1 ),
M5: 4(P, A, B), 4(P, A1 , B1 ) kongruent.
⇒ ](A, P, B), ](A1 , P, B1 )
(Schreibweise: s. Winkeldef.).
Wähle
[Abb.26]
29
3.17 Satz: Parallelenexistenz
Zu jeder Geraden
G
mindestens eine zu
Beweis:
Punkt B'∈
und jedem nicht auf ihr liegenden Punkt A
G
Wir denieren eine Lotgerade
G
∈P
existiert
parallele Gerade durch den Punkt A.
so, dass A∈
L = G(A, B 0 )
von
G
durch einen
L.
Lotdef.: ](B 0 , B, A) kongruent zu ](N, B, A), ∀N ∈ G ,
2.9.2: G ∩ G(A, B 0 ) = {B 0 },
A3: ∃C ∈ G(A, B 0 )\{B 0 }: d (A, B 0 ) = d (A, C) ∧ (B 0 , A, C) ∈ Z ,
⇒ ∃f ∈ Iso(P) : f (B 0 ) = A, f (A) = C .
0
0
Wir denieren: f (G) = G
(G ∩ L = {A}).
zz.: G ∩ G 0 = ∅.
Annahme: G ∩ G 0 = {D} ⇒ D ∈ G ⇒ f (D) ∈ G 0 .
M5: ⇒ 41 (A, B 0 , D) kongruent zu 42 (A, C, f (D)).
M6: ∃E ∈ G 0 : d (A, E) = d (B 0 , D) ∧ (E, A, D) ∈ Z .
Nach Lotdef. sind die Winkel zw.
beim abbilden mit
f
auf
G0
G, L
rechte und diese bleiben
erhalten. Mit
](B 0 , A, E) folgt:
SWS: 42 (A, C, f (D)) kongruent
](C, A, f (D))
kongru-
ent zu
zu
43 (A, B 0 , E).
(Die Seiten-
gleichheit folgt aus Def. von E und AB' ist gleich.)
⇒ 41 (A, B 0 , D)
kongruent zu
43 (A, B 0 , E).
M1 und Gleichheit Dreiecksseiten:
d (D, E) = d (D, A) + d (A, E) = d (D, B 0 ) + d (B 0 , E)
B,D ∈ G :⇒ E ∈ G
⇒ G ∩ G 0 = {D, E}
2.9.2: G = G 0
!
A∈
/G
30
[Abb.27]
31
![2. Die Implikationslogik H⇒ nach [Gabbay, 1981]1](http://s1.studylibde.com/store/data/002500164_1-0d86439a8d531f9015af1a985d5885c9-300x300.png)