1 - webwww03 - poseidon.heig
Werbung

1. Einleitung
Bei immer mehr Maschinen und Anlagen werden die mechanischen, pneumatischen und
hydraulischen Lösungen durch elektrische ersetzt. Die spezifischen Anforderungen auf diese
Antriebe, wie höhere Positioniergenauigkeit, aktive Vibrationsunterdrückung und
Reglerparameteroptimierung werden immer erweitert. Auch wenn diese Anforderungen mit
den neuen Technologien wie digitale Signalverarbeitung und DSP-Technik möglich sind, eine
Maschinenanalyse ist immer notwendig.
Die erfolgreiche Inbetriebnahme der elektrischen Antriebe geht mit dem Verständnis und den
Anwendungen der regelungstechnischen Konzepte zusammen.
In diesem LernModul wollen wir eine Einführung in die Modellbildung und
Regelkreisstrukturen eines elektrischen Servoantriebes geben. Wir verstehen unter
Servoantrieben allgemein hochdynamische und genaue Drehstromantriebe. Diese Konzepte
werden auf den Simulations- und Anlagebeispiele illustriert.
Wir begrenzen uns auf die Servomotoren im Leistungsbereich von 0.5 bis 50kW. Die
Führungs- und Störverhalten der lagegeregelten Einzelantriebe mit den
permanentmagneterregten Synchronmotoren in der dezentralen Automatisierungskonzepte
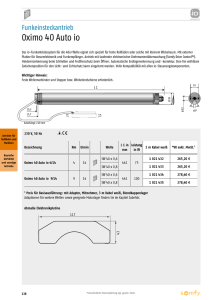
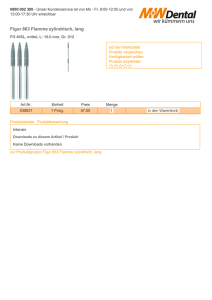
werden präsentiert. Die Komponenten eines Servoantriebs in den Antriebsebene
\cite{Mercx} sind im Figur f_asspa_02 gezeigt. Diese Abbildung zeigt,dass der Motor, der
Servo - Umrichter, der Geber und die mechanischen Elemente ein eng verknüpfes System
bilden dessen Komponenten als Einheit betrachtetn werden müssen.
f_asspa_02
Die Motorauslegung sowie die Feldbusdefinitionen und Steuerungsfunktionalitäten nach
IEC61131 werden nicht betrachtet.
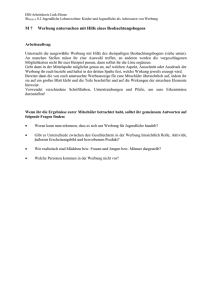
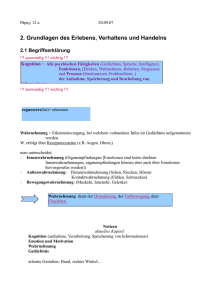
Im Wirkungsplan der Regelung (Figur f_asspa_03) werden nur die Rückführungsregler und
die Vorsteuerung untersucht, ohne Drehmomentwelligkeitskompensation und Abgleich der
geometrischen Fehler.
f_asspa_03
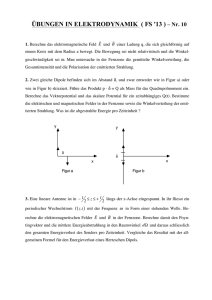
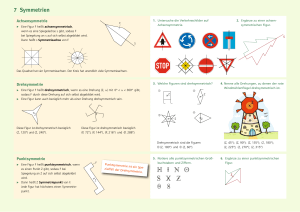
Das Motorbasismodell (Figur f_asspa_04 ) wird durch die Reibungsidentifikation und
Resonanzphänomene erweitert. Das System besteht aus Lage-, Drehzahl- und Stromregler
und der Regelstrecke, diese enthält den Synchronmotor mit der angekoppelten Mechanik der
Arbeitsmaschine.
f_asspa_04