Hysteresekupplungen und Hysteresebremsen
Werbung

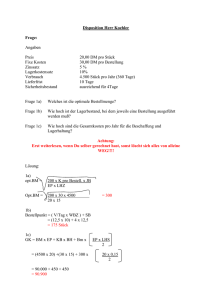
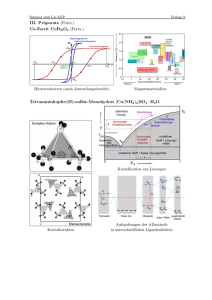
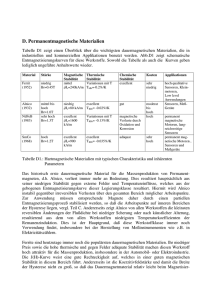
Hysteresekupplungen und Hysteresebremsen Ein in der Fachliteratur kaum beachtetes Übertragungselement erlebt eine Renaissance Dr.-Ing. F. Jurisch, VACUUMSCHMELZE GmbH & Co. KG, Hanau Kurzfassung Hysteresekupplungen und -bremsen übertragen berührungslos und unabhängig von der Drehzahl, der Drehrichtung und der Differenzdrehzahl zwischen An- und Abtriebsteil ein konstantes Drehmoment. Somit sind sie auch als Haltebremsen geeignet. Der eine Part fungiert als Erreger eines mehrpoligen magnetischen Feldes, welches das Hysteresematerial im anderen Teil mehr oder auch weniger stark aussteuert. In dieser Arbeit wird die Drehmomentbildung hergeleitet, das Zusammenspiel zwischen Erreger- und Hystereseteil erläutert und ein einfacher Berechnungsweg auf Basis von Abschnittsleitwerten vorgestellt, der die Abmessungen und Materialeigenschaften berücksichtigt. Die Abhängigkeiten der geometrischen und konstruktiven Auslegung von den magnetischen Materialeigenschaften werden beispielhaft berechnet und in Diagrammen dargestellt. Die verschiedenen konstruktiven Lösungen und Hysteresematerialien mit ihren Vor- und Nachteilen werden erläutert. Abstract The hysteresis clutches and brakes transfer a constant torque without contact and independent from speed, its direction and slip. Therefore they can also be used as stopping brakes. The hysteresis device consists of two parts. One is an exciter of a magnetic multipolar field which saturates the hysteresis material in the other part in different grades. This paper describes the development of torque and the interaction of excitation and hysteresis part. A simple model of calculation is presented. It is based upon magnetic linear conductances and allows for geometry dimensions and magnetic properties. The dependencies of geometry and construction on the magnetic properties are calculated in examples and presented in diagrams. The different solutions for construction and properties of hysteresis materials and their advantages and disadvantages are also described. 1. Betriebsverhalten und Anwendung von Hysteresebremsen und -kupplungen Im Folgenden werden Bremsen und Kupplungen nur noch als Kupplungen bezeichnet. Die Hysteresekupplung besteht aus einem Erregerteil und dem Hystereseteil, auf welchem sich das Hysteresematerial befindet. Die Rotationsachsen liegen in einer Flucht. Erreger- und Hystereseteil können axial aneinander stoßen oder konzentrisch ineinander liegen und sind durch einen Luftspalt getrennt. Der Erregerteil erzeugt das magnetische multipolare Feld zur Aussteuerung bis in den gesättigten Zustand des sich auf dem anderen Teil befindlichen Hysteresematerials. Drehmoment 200 Hysteresemoment synchroner Lauf (s = 0) mit Schlupf (s < 0) überlastet (Stillstand) 150 Antriebsdrehzahl 100 50 0 0 200 400 600 800 1000 1200 Drehzahl 1400 1600 Bild 1: Auswirkung verschiedener Belastungen auf das Übertragungsverhalten Eine Hysteresekupplung überträgt berührungsfrei und unabhängig von der Drehzahl n, der Drehrichtung und der Differenzdrehzahl (Schlupf) ein konstantes Drehmoment (Hysteresemoment Mhys). Ist das Abtriebsmoment Mab kleiner als das Hysteresemoment, dann laufen Anund Abtrieb synchron mit gleicher Drehzahl und gleichem Drehwinkel (Bild 1). Wird das Hysteresemoment überschritten (Mhys < Mab) tritt ein Schlupf zwischen An- und Abtrieb auf, der so weit anwächst bis sich auf Grund der Arbeitskennlinie Mab = f(n) ein Momentengleichgewicht Mab = Mhys eingestellt hat. Ist das Abtriebsmoment (= Belastung) weiterhin größer als das Hysteresemoment, bleibt der Abtriebsteil der Kupplung stehen (nab = 0). Auf Grund dieses Verhaltens werden Hysteresekupplungen eingesetzt, um Antriebe vor Schäden zu schützen. Sie arbeiten als Sicherheitskupplung und Drehmomentbegrenzer. Durch die Übertragung eines von der Differenzdrehzahl unabhängigen konstanten Momentes stellt diese Anordnung auch eine verschleißfreie Bremse dar. Da dieses Bremsmoment auch bei Schlupf und Drehzahl von Null aufgebaut wird, ist sie auch als Haltebremse geeignet [ 1 ]. Durch eine Veränderung der Erregung mittels Variation des Luftspaltes, der Überdeckung von Erreger- und Hystereseteil oder der Aussteuerung (Sättigungsgrad) bzw. der Flussführung kann das Hysteresemoment von einem Maximalwert ausgehend verringert werden. In verschiedenen Ausführungen sogar bis zum Wert Null. Somit kann das Übertragungsmoment in Stufen oder kontinuierlich eingestellt, geregelt und in einen Regelkreis eingebunden werden. Besonders einfach lässt sich dies bei einer elektrischen Erregung umsetzen. Bei Permanenterregung sind mechanische Stellglieder erforderlich. Weit verbreitete Anwendungen finden sich in Auf- und Abhaspeleinrichtungen mit nicht von der Drehzahl abhängigen regelbaren oder konstanten Faden-, Draht- oder Bandzügen. In Druckern, Kopierern sowie Geld- und Fahrkartenautomaten schützen Hysteresekupplungen vor Zerstörung der durch Zahnriemen zentral angetriebenen Transportwellen und Wickelspeicher. Bei letzteren sorgen Hysteresebremsen für die erforderlichen Bandzüge. Die Vorteile liegen im berührungslosen und somit verschleißfreien Betrieb und bei permanenterregten Systemen in der Betriebssicherheit, d.h. ohne Energiezufuhr auszukommen. 2. Funktionsprinzip Die Wirkungsweise der Hysteresekupplung wird aus der Leistungsbilanz der aus An- und Abtriebsteil bestehenden Anordnung hergeleitet. Es wird eine Axialspaltanordnung mit dem Erregerteil auf der Antriebsseite und dem Hysteresematerial auf der Abtriebsseite betrachtet. MAntrieb = MAbtrieb = Mhys = M MAntrieb MAbtrieb nan nab Pan = M * Wan nan – nab = Dn Pab = M * Wab f = p*Dn Pschlupf = Pan – Pab = M * 2p Dn = Pv hys = vh * V * f Mhys = vh * V * p / 2p v h = ò BdH = ò HdB = Schleifeni nhalt Das maximal übertragbare Hysteresemoment wird durch den Flächeninhalt (= Energie) der voll ausgesteuerten Schleife des Hysteresematerials vh und dessen Volumen V bestimmt und ist außerdem proportional der Polpaarzahl p des Erregersystems [ 2 ]. Der Hystereseschleifeninhalt vh wird auch als Hysteresebeiwert bezeichnet. 3. Randbedingungen Hysteresematerial · großer Schleifeninhalt vh ≈ 4 * Br * Hc (anisotrop – aber in der richtigen Richtung) · aber auch relativ gute magn. Leitfähigkeit (µr ↑) wegen des Erregerbedarfs · großes Volumen (Materialdicke s; Durchmesser D; Länge l ) Erregersystem Fsoll = Ferr · Hysteresematerial soll innerhalb eines Polwechsels vollständig gesättigt werden · hohe Polzahl (aber Sättigungsbedingung beachten) Fsoll = Jsätt.hys *s * l Ferr = ap BM* tp * l ≡ BM ≈ Br* hM/(hM + d) Daraus ergibt sich die Aufgabe, eine optimale Polteilung tp opt zu finden, bei der alle Teile des Hysteresematerials beim Durchlaufen von zwei Polteilungen einen vollen Ummagnetisierungszyklus von +Hsätt über Null bis -Hsätt und wieder zum Ausgangspunkt zurück erfahren. Hierfür wird ein Ersatzschaltbild mit linearen Bauelementen entworfen. Der Ansatz basiert auf der gerade erreichten Sättigung des Hysteresematerials durch den Erregerfluss. Der Feldaufbau kann sowohl permanent als auch elektrisch erregt erfolgen. 4. Magnetisches Ersatzschaltbild für die permanenterregte Ausführung Das magnetische Feld tritt senkrecht ins H oszillierend Hysteresematerial ein und läuft dann auf Grund H rotierend der guten magnetischen Leitfähigkeit im Band weiter. Die Sättigung wird nur in der Pollücke eintreten. Es ist ausreichend, wenn alle Volumenelemente auf einem schmalen Streifen gesättigt sind. Ein zu starkes Feld würde das Material schon beim Eintritt voll aussteuern und eine drehende Magnetisierung mit gesättigtem Feldvektor hervorrufen. Ein solches Feld bewegt keine Blochwände mehr sondern lässt nur noch den Feldvektor rotieren. Drehende Magnetisierung mit voll ausgesteuertem Feld ruft Aussteuerung B / Jsätt keine Hystereseverluste und somit auch kein Drehmoment mehr hervor [ 3 ]. Zu wenig aber 0% auch zu viel Feld führt zur Abnahme des Bild 2: Hystereseverluste bei drehender Drehmomentes. 20% 40% 60% 80% 100% 120% und wechselnder Magnetisierung Bild 3: Modell Hysteresematerial s Js ; Brh ; Hc ; s hM aM (=b M/tp) ; d tp Erregermagnet BrM ; hM ; aM bM Bild 4: Ersatzschaltbild R’sa = 1,895 / µ0 R’Hy = 2tpHc / s(Js + Brh) R’si = (1- ap)tp / 2m0d R’d = 2d / m0aptp R’ds = 1,895 / µ0 R’M = 2hM / µ0µpaptp QM = BrM hM / µ0µp m hys . sätt = ( J s + B rh ) / 2 2H c 5. Materialwahl Aus dem Kompromiss eines hohen Schleifeninhaltes und des Sättigungs-Erregerbedarfes muss die Verlustziffer vh hauptsächlich aus einer großen Remanenzinduktion Br geholt werden. Metallisch kompakte Magnetwerkstoffe auf Co-Basis und einer rechteckförmigen Schleife auf Grund einer Vorzugsrichtung (Anisotropie) sind besonders geeignet. Zur ausreichenden Sättigung des Materials benötigt man ein Feld, welches ca. der doppelten Koerzitivfeldstärke Hc entspricht. Um die dafür erforderliche Erregung noch aufbringen zu können, beschränkt sich die Auswahl auf halbharte Magnetwerkstoffe mit Hc < 600 A/cm wie AlNiCo, FeCrCoMo (CROVAC) und CoFeV (MAGNETOFLEX) [ 4 und 5 ]. AlNiCo-Werkstoffe werden gegossen oder pulvermetallurgisch gesintert hergestellt. Dies führt zu relativ großen Wandstärken eines spröden, harten und nur durch Schleifen bearbeitbaren Materials. Die Herstellung einer circumpheralen (tangentialen) Vorzugsrichtung ist sehr schwierig, deshalb werden meist nur isotrope Materialien eingesetzt. In anisotroper Herstellung würde man Hysteresebeiwerte bis 325 µWs/mm³ erreichen. Isotrop sind es nur maximal 150 µWs/mm³. Speziell für Hysteresemotoren entwickeltes höherpermeables Material auf Basis AlNiCo liegt nur bei 25 bis 50 µWs/mm³. Die verformbaren FeCrCo- und CoFeV-Werkstoffe haben den Vorteil, dass sie in dünnen Bändern gewalzt, in Scheiben gestanzt, zu Ringen gerollt oder sogar zu Töpfen tiefgezogen werden können. Im abschließenden Glühprozess werden die Materialien magnetisch und auch mechanisch hart. Die Koerzitivfeldstärke und somit der Schleifeninhalt können durch den Glühprozess eingestellt werden. Beim CROVAC wird eine Anisotropierung durch eine Magnetfeldglühung ähnlich wie beim AlNiCo erreicht [ 5 ]. Magnetoflex weist eine Walzanisotropie auf. Bei diesem Material kann der Schleifeninhalt besonders gut durch die Glühtemperatur eingestellt werden (siehe Bild 2). 300 1.2 Br [T] 250 1.0 Hc [A/cm] 200 0.8 150 0.6 100 0.4 50 0.2 Anlasstemperatur TA [ °C ] 0 450° 0.0 475° 500° 525° 550° 575° 600° 625° 650° 675° 700° Bild 5: Hc und Br als Funktion der Anlasstemperatur bei MAGNETOFLEX 35 U In Tabelle 1 sind die Kennwerte der wichtigsten Hysteresewerkstoffe und in Tabelle 2 die Remanenzen der in den Erregersystemen eingesetzten Dauermagnete zusammengestellt. Tabelle 1: Kennwerte der wichtigsten Hysteresewerkstoffe [ 4 und 5 ] Material Br [ T ] Hc [A/cm] AlNiCo isotr. 0,8 …1,2 100…600 vh [ µWs/mm³ ] Jsätt. [ T ] Dichte [g/cm²] 25 … 325 1,2 … 1,4 7,1 … 7,4 CROVAC12/500 aniso 1,15 < 450 < 210 1,35 7,6 CROVAC 12/160 isotr. 0,90 < 360 < 130 1,35 7,6 MAGNETOFLEX 35 U 0,85 < 280 < 90 1,15 8,1 Tabelle 2: Remanenzwerte der wichtigsten Permanentmagnete [ 6 und 7 ] Material Remanenz Br [ T ] Material Remanenz Br [ T ] Hartferrit isotrop 0,18 … 0,22 NdFeB gespritzt (iso) 0,45 … 0,60 Hartferrit anisotrop 0,38 … 0,44 NdFeB gepresst (iso) 0,62 … 0,74 Ferrit gespritzt (aniso) 0,24 … 0,29 NdFeB gesintert (aniso) 1,10 … 1,40 Der Temperaturkoeffizient der Remanenzinduktion beträgt für Ferrit: TK(Br) = -0,2 %/K NdFeB: TK(Br) = -0,1 %/K und 6. Abhängigkeiten der optimalen Polteilung Die optimale Polteilung legt die Eintrittsbreite des magnetischen Flusses fest, der dann zur Sättigung der Hysteresematerialdicke s beitragen soll. Demzufolge gibt es einen direkten linearen Zusammenhang der optimalen Polteilung von der Sättigungspolarisation Jsätt. und der Dicke des Hysteresematerials. Die Remanenzinduktion BrM und die Polbedeckung ap des Permanentmagneten gehen reziprok linear ein. Eine Änderung der Magnetdicke hM oder des Luftspaltes d haben je nach daraus resultierender Veränderung des Arbeitspunktes Einfluss auf die optimale Polteilung. Der Zusammenhang ist reziprok und im Einfluss proportional zur Scherung. Die Koerzitivfeldstärke Hc des Hysteresematerials ruft nur über ihren Einfluss auf die magnetische Leitfähigkeit Änderungen hervor. Da der magnetische Spannungsabfall aber wesentlich durch Luftspalt und Streuung bestimmt wird, ist der Einfluss sehr gering. Die Remanenzinduktion des Hysteresematerials Br hys steht in einem direkten Verhältnis zur Sättigungspolarisation und wird deshalb nicht extra untersucht. Für die Berechnung der Abhängigkeiten basiert das geometrievariable Erregersystem auf NdFeB-Einzelmagneten (gesintert) mit Br = 1,20 T und 5 mm Höhe bei 70 % Polbedeckung und das Hysteresematerial auf isotropem, 1,0 mm dicken CROVAC 12/160 mit Hc = 350 A/cm und Jsätt. = 1,30 T. Die isotropen kunststoffgebundenen Magnete werden meist vielpolig lateral magnetisiert ausgeführt und es liegt eine Halbachkonfiguration des Erregerfeldes vor. Die Magnetgeometrie ist dadurch in einigen Freiheitsgraden eingeschränkt. Mit der Polteilung werden gleichzeitig die Polbedeckung und die Magnethöhe festgelegt. Das Erregersystem besitzt somit nur noch den Freiheitsgrad der Remanenzinduktion. Für die Parameterstudie der Halbachanordnung wurde für die Erregung kunststoffgespritztes Hartferrit mit einer Remanenz von Br = 0,285 T sowie für das Hysteresematerial MAGNETOFLEX 35 U mit einer Koerzitivfeldstärke von Hc = 250 A/cm in einer Dicke von 0,31 mm zu Grunde gelegt. Der Luftspalt beträgt 1,0 mm. Die optimale Polteilung bildet die Grundlage für das Festlegen der Polpaarzahl p, einer der bestimmenden Größen zur Berechnung des maximalen Übertragungsmomentes. Entweder wird die Polpaarzahl aus den zur Verfügung stehenden Platzverhältnissen (mittlerer Luftspaltdurchmesser D) berechnet oder bei vorgegebener Polzahl der Luftspaltdurchmesser D des Systems festgelegt. p = p*D/2tp opt. D = (2p/p)* tp opt. oder Die Abhängigkeit der optimalen Polteilung eines Einzelmagneterregersystems von: 16 20 tp t p opt opt. 14 16 12 12 10 8 8 Br [ T ] 6 4 0.4 0.6 0.8 1.0 1.2 1.4 0 1.6 1 2 3 4 5 6 7 hM Bild 6: der Remanenzinduktion und Bild 7: der Magnethöhe des Magneten 10 40 tp tp opt. Polbedeckung opt. 50 % 30 8 8 70 % 90 % 20 100 % 6 Jsätt. [ T ] 4 10 Dicke s [ mm ] 0 0.8 1.0 1.2 1.4 Bild 8: der Sättigungspolarisation Jsätt.hys 2 4 6 8 Bild 9: der Dicke bei versch. Polbedeckung 9.0 7.6 tp 0 1.6 tp opt. 8.5 7.5 opt 8.0 7.5 7.4 7.0 7.3 Hc [ A/cm ] 7.2 100 6.5 d / mm 6.0 200 300 400 500 600 700 Bild 10: der Koerzitivkraft des Hysteresemat. 0.0 0.5 1.0 1.5 Bild 11: der Luftspaltweite 2.0 2.5 3.0 Für die Halbachanordnung ergeben sich analoge Abhängigkeiten der opt. Polteilung von: 12 12 tp tp opt. 10 8 opt. 8 6 4 4 0 0.0 0.2 0.4 0.6 Br [ T ] 0.8 Bild 13: der Remanenz des Magneten s [ mm ] 2 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Bild 14: der Dicke des Hysteresematerials 7. Konstruktionsprinzipien Das Grundprinzip basiert auf einer Anordnung alternierender Pole, denen gegenüber sich das Hysteresematerial befindet. Der vom Polsystem erregte magnetische Fluss tritt über den Luftspalt in das Hysteresematerial ein und fließt in diesem zu den benachbarten Polen, wobei er in der Pollücke das Material vollständig bis in die Sättigung aussteuern muss. Man unterscheidet die Zentraldrehanordnung mit radialem und die Stirndrehanordnung mit axialem Luftspalt. Vom Prinzip her können beide Anordnungen sowohl permanentmagnetisch als auch elektrisch erregt werden. Der Aktivteil des Hysteresematerials ist beim Radialluftspalt die Mantelfläche eines (gerollten) Ringes oder eines tiefgezogenen Topfes, beim Axialluftspalt die Stirnfläche eines Kreisringes (Scheibe mit oder ohne Loch). Wenn anisotropes Material zum Einsatz kommen soll, so muss die Vorzugsrichtung in beiden Fällen tangential (in Umfangsrichtung) verlaufen. Bei höheren Polzahlen (2p > 8) kann man mit einem diametral vorzugsgerichteten Ring einen höheren Schleifeninhalt und somit größere Übertragungsmomente als mit isotropem Material erzielen, ohne hohe Oberwellenmomente mit in Kauf nehmen zu müssen. Senkrecht zur Vorzugsrichtung ausgesteuertes anisotropes Material hat noch geringere Schleifeninhalte als isotropes Material gleicher Materialbasis. Bei der Permanenterregung kann durch Verschieben der beiden Partner der axiale Luftspalt vergrößert und somit das Moment verringert werden. Bei radialem Spalt wird durch ein axiales Verschieben die Überdeckung und somit das Moment verringert. Bei der Axialluftspaltanordnung tritt generell ein großer und bei der Zentraldrehanordnung ein mit der Verschiebung steigender axialer Zug auf, der in den Lagern abgefangen werden muss. Er kann aber auch gezielt zur Lagefixierung des sich drehenden Teils ausgenutzt werden. Joch S N N S S N N Hysteresescheibe Luftspalt Magnet S Bild 15: Stirndrehkupplung mit axialem Luftspalt Hysteresematerial Magnet Welle Bild 16: Zentraldrehkupplung mit radialem Luftspalt Bei der sgn. Doppelanordnung befinden sich zwei Erregerpolsysteme durch Luftspalte getrennt an beiden Seiten des Hysteresematerials. Von der Berechnung her kann man zwei Einfachsysteme mit der halben Hysteresematerialdicke ohne Streufluss auf der dem Erregersystem abgewandten Seite konfigurieren. Das maximale Übertragungsmoment Mmax ergibt sich, wenn sich gleichnamige Pole gegenüber stehen. Durch Verdrehen um eine Polteilung kann das Moment bis auf einen Minimalwert Mmin verringert werden. Die Änderung verläuft annähernd sinusförmig mit der Verdrehung a. M(a) = ½ (Mmax + Mmin) + ½ (Mmax – Mmin) cos(pa) Die axiale Verschiebung oder das Verdrehen bei der Doppelanordnung wird auch zur Justierung auf bestimmte Übertragungsmomente bei permanentmagnetisch erregten Systemen genutzt. Bild 17: Doppelsystem mit axialem Luftspalt Mit einer elektrischen Erregung kann über den Erregerstrom das Übertragungsmoment von nahezu Null (nur nach Wechselfeldentmagnetisierung möglich) kontinuierlich bis zum Maximalmoment verändert werden [ 8 ]. Beim Abregeln ist zu beachten, dass der Strom nur langsam bei schlüpfender Anordnung (s ≠ 0) verringert werden darf. Anderenfalls werden Oberwellenmomente auf Grund des Restmagnetismus im Hyseresematerial erzeugt. Einzelheit Z Bild 18: Prinzip der elektrisch erregten Hysteresebremse In der oben skizzierten elektrisch erregten Anordnung entspricht die Polzahl der Gesamtzahl der Zähne. Auch bei der Auslegung dieses Systems ist auf die Abhängigkeiten der optimalen Polteilung zu achten. Da elektrisch leicht übererregt werden kann, besteht die Gefahr des Abgleitens in den Bereich der drehenden Magnetisierung. Das Verhältnis Zahn/Lücke sollte größer 1 sein und kann bis 2 betragen. Diese Bremsen können sehr dynamisch wechselnde Lasten aufbauen. 8. Hinweise zur Auslegung Es ist zu beachten, dass die Kupplung nur im synchronen Lauf bei Schlupf s = 0 keine Leistung im Hysteresematerial umsetzt. Wenn eine Differenzdrehzahl auftritt oder ein Teil stehen bleibt, wie es bei Bremsen generell der Fall ist, treten je nach Drehmoment M und Schlupfdrehzahl n Verluste auf, die entweder im Dauerbetrieb über geeignete Kühlung abgeführt oder im Kurzzeitbetrieb adiabatisch von der Wärmekapazität c des Hysteresematerials aufgenommen werden kann. Das Hysteresematerial erleidet im Allgemeinen keine Schädigung, da diese Werkstoffe bis mindestens 450°C beständig sind, aber der Träger (in vielen Fällen aus Kunststoff) und die benachbarten Magnete oder Wicklungen einschließlich der verwendeten Kleb- und Isolierstoffe sind meist nur für 120°C und bis 180°C ausgelegt. Die Verluste Pv ergeben sich nach der zugeschnittenen Größengleichung zu: Pv [ W ] = 1,05 M [ Ncm ] * n [1000 / min ] Die Übertemperatur Tü resultiert aus dem Wärmeübergangskoeffizienten ath und der Wärme abführenden Oberfläche O auf Grund dieser Verlustleistung zu: Tü = Pv / ( ath*O ) Für rotierende Körper in ruhender Luft beträgt ath = 0,02 … 0,03 W/Kcm². Für die Berechnung der thermischen Zeitkonstante tth = (c*m)/(ath*O) zur Abschätzung der Erwärmung im Kurzzeitbetrieb werden noch die spezifische Wärme c und die Dichte g der Hysteresewerkstoffe für die Berechnung der Masse m benötigt [ 9 ]. Die spezifische Wärmekapazität dieser Werkstoffe beträgt ca. 460 ±20 J / (kg * K). Die Dichten sind Tabelle 1 zu entnehmen. 9. Literaturverzeichnis [1] Koch, J.; Ruschmeyer, K.; „Permanentmagnete II“, Boysen & Maasch , HH 1982 [2] Schüler, K.; Brinkmann, K.; „Dauermagnete“, Springerverlag, Berlin, Heidelberg 1970 [3] Gössel, K.; „Magnetische Eigenschaften quasiisotroper Elektrobleche bei elliptischer Magnetisierung“ TU Dresden, Sektion 11 Elektrotechnik 1973 [4] „Dauermagnetische Werkstoffe“ Firmenschrift, Krupp Widia , Essen 1989 [5] „Verformbare Dauermagnete“, Firmenschrift PD-003, Vacuumschmelze, Hanau 1999 [6] „Kunststoffgebundene Dauermagnete“, Firmenschrift Max Baermann, Berg. Gladbach [7] „Selten-Erd-Dauermagnete“, Firmenschrift PD-002, Vacuumschmelze, Hanau 2003 [8] Jordan, H. u.a., „Die Hysteresekupplung, ein neues Übertragungselement“, ETZ 86 (1965) 6 S. 385-390 [9] Philippow, E. u.a., TB “Elektrotechnik“ Bd. 1 u.2, Verlag Technik, Berlin 1970