Regelschaltungen PID
Werbung

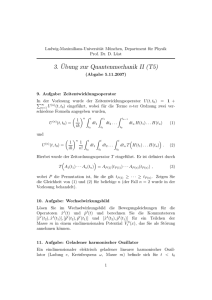
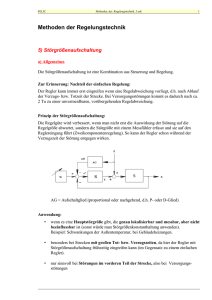
Fortgeschrittenenpraktikum I Universität Rostock - Physikalisches Institut 8. Regelschaltungen Name: Betreuer: Versuch ausgeführt: Protokoll erstellt: Daniel Schick Dipl. Ing. D. Bojarski 8. Juni 2006 11. Juni 2006 2 Inhaltsverzeichnis 1 Versuchsbeschreibung 1.1 Ziel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 4 2 Sprungantworten 2.1 Reglerprinzip 2.2 P-Regler . . . 2.3 I-Regler . . . 2.4 D-Regler . . . 2.5 PID-Regler . . . . . . 5 5 5 6 6 7 3 Regelstrecke 3.1 Übertragungsverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Dimensionierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Realisierung & Optimierung . . . . . . . . . . . . . . . . . . . . . . . 9 9 10 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Versuchsbeschreibung 1.1 Ziel Kennenlernen stetiger Regler und das Verhalten von Regelstrecken. 1.2 Aufgaben 1. Ermitteln Sie die Sprungantwort folgender Regler: a) P-Regler b) I-Regler c) D-Regler d) PID-Regler Realisieren Sie die Regler mit Operationsverstärkern. 2. Bestimmen Sie das Übertragungsverhalten der Regelstrecke (Abb. 7). 3. Dimensionieren und realisieren Sie für die in Aufgabe 2 untersuchte Regelstrecke einen PID-Regler mit Operationsverstärkern. Optimieren Sie den Regler im geschlossenen Regelkreis und messen Sie die folgenden Größen: • Ist-Größe • Stör-Größe • Stell-Größe 4 2 Sprungantworten 2.1 Reglerprinzip Kommt es in einer Regelstrecke, wie z.B. in Abb. 1 dargestellt, zu einer Abweichung zwischen Ist- und Sollgröße, reagiert der Regler auf diese Regelabweichung durch eine Stellgröße, die in die Regelstrecke einfließt. Da auf die Regelstrecke ständig eine Störgröße einwirken kann, muss der Regler immer versuchen diese auszugleichen. Es handelt sich somit um einen geschlossenen Regelkreis. Abbildung 1: Reglerprinzip Es gibt verschiedene Typen von Reglern die sich alle durch ihren Aufbau und ihre Eigenschaften unterscheiden. Es lassen sich auch Kombinationen der einzelnen Regler durch Parallelschaltungen realisieren. Im Weiteren betrachten wir Proportional-, Integral- und Differential-Regler sowie eine Kombination aus allen drei, den PIDRegler. 2.2 P-Regler Abbildung 2: Schaltplan und Sprungantwort des P-Regler Proportionalregler reagieren schnell auf Störungen und erzeugen eine zur Regelabweichung proportionale Veränderung der Stellgröße. Sie können die Differenz zwischen 5 Ist- und Sollgröße jedoch nicht vollständig ausregeln, da sie nur eine beliebige Änderung der Stellgröße bewirken. Wie in Abb. 2 zu sehen, lassen sich P-Regler durch einen Summierer realisieren. Liegt keine Regelabweichung vor, liegt auch keine Spannung am Eingang des OVs an und da keine Differenzspannung vorhanden ist, liegt auch keine Ausgangsspannung an. Bei einer beliebigen Regelabweichung erzeugt der OV eine dazu proportionale Ausgangsspannung. Das Oszillogramm in Abb. 2 bestätigt die Arbeitsweise des P-Reglers. 2.3 I-Regler Der Integralregler verändert seine Stellgröße solange wie eine Regelabweichung vorhanden ist. Somit reagiert er zwar recht langsam auf Regelabweichungen, gleicht diese jedoch vollständig aus. Abbildung 3: Schaltplan und Sprungantwort des I-Regler Die in Abb. 3 dargestellt Schaltung, zeigt wie ein I-Regler durch einen OV in Integratorbetrieb realisiert werden kann. Die Funktionsweise ist dabei analog wie beim P-Regler bis auf die Generierung der Ausgangsspannung. Das Oszillogramm verdeutlicht die integrierende Wirkung des I-Reglers. 2.4 D-Regler Abbildung 4: Schaltplan und Sprungantwort des D-Regler 6 Der Differentialregler ändert die Stellgröße in Abhängigkeit der Geschwindigkeit der Regelabweichung. Damit können sehr schnelle Spannungssprünge ausgeglichen werden, da der D-Regler auf Tendenzen reagiert. Bei konstanten Regelabweichungen zeigt er jedoch keine Reaktion, weshalb er auch meist in Kombination mit P- oder PI-Reglern verwendet wird. Realisiert werden D-Regler durch OVs, die als Differenzierer beschaltet sind, siehe Abb. 4. Das entsprechende Oszillogramm zeigt deutlich die Spannungssprünge des Reglers bei Änderungen der Regelabweichungen und seine Inaktivität bei konstanten Regelabweichungen. 2.5 PID-Regler Der PID-Regler kombiniert alle drei oben beschriebenen Regler, indem diese parallel geschaltet werden und ihre Ausgangssignale mit Hilfe eines weiteren OVs zusammenaddiert werden, s. Abb. 5. Somit kann der PID sehr schnell auf Regelabweichungen reagieren und schafft es auch diese vollständig auszugleichen. Beim Dimensionieren des PIDs wurden die Potentiometer RT V , RV0 P und RT N so variiert, dass das Verhältnis der Ausgangsspannungen der einzelnen Regler zu einem anschaulichen Ausgangssignal des PIDs führte. 30pF R_TV 10k C_TV R_VP’ R_VP 100k 10k 1k C_TN 1k R_TN 1M 10k Abbildung 5: Schaltplan des PID-Reglers 7 Abb. 6 zeigt das Ergebnis der Messung. Es lassen sich sehr gut die einzelnen Anteile der unterschiedlichen Regler in der Sprungantwort wiedererkennen. Abbildung 6: Sprungantwort des PID-Reglers 8 3 Regelstrecke Es wurde die in Abb. 7 dargestellte Regelstrecke verwendet. Dabei schaltet ein Transistor über die Transistorspannung UT r den Strom der durch die Glühbirne fließt. Ein gegenüberliegender Phototransistor erzeugt dann beim Leuchten der Glühbirne einen Strom. Am Widerstand R fällt dann eine zum Phototransistorstrom proportionale Spannung UR ab. Es kann außerdem eine Leuchtdiode mit Hilfe einer Spannung UD als Störsignal in die Regelstrecke eingehen. Um äußere Einflüsse ausschließen zu können, ist der gesamte Aufbau in einer Plastikbox untergebracht. Abbildung 7: Schaltplan Regelstrecke 3.1 Übertragungsverhalten Um das Übertragungsverhalten der Regelstrecke zu untersuchen, wurde zunächst eine Rechteckspannung mit einer Frequenz von 0, 3Hz am Transistor angelegt. Ihre Amplitude wurde so gewählt, dass die Spannung am Widerstand etwa UR ≈ 3V betrug. Das Oszillogramm in Abb. 8 zeigt das Übertragungsverhalten der Regelstrecke. Abbildung 8: Übertragungsverhalten der Regelstrecke 9 3.2 Dimensionierung Ziel ist es jetzt die Regelstrecke und den PID-Regler zu kombinieren. Dazu muss zuerst der PID dimensioniert werden, da jede Regelstrecke unterschiedliche Verzugszeiten TU und Übergangszeiten TG besitzen kann. Im ersten Schritt wurden die beiden charakteristischen Zeiten der Regelstrecke aus dem Oszillogramm, s. Abb. 8, bestimmt. Dazu wurde eine Wendetangente an die Sprungantwort gelegt und deren Schnittpunkte mit der minimal und maximal anliegenden Spannung am Widerstand R bestimmt. Die Verzugszeit TU wird vom Sprung der Eingangsspannung bis zum ersten Schnittpunkt und die Übergangszeit vom ersten bis zum zweiten Schnittpunkt der Wendetangente gemessen. Es ergaben sich folgende Werte TU = 630ms TG = 550ms Um die Verstärkung Vs der Regelstrecke zu erhalten, wurden die positive Halbwelle der Eingangsspannung und die Ausgangsspannung gemessen. Es ergaben sich folgende Werte: 2, 313V Ua = = 0, 813 Vs = Ue /2 5, 687V Damit ergibt sich das Verstärkungsverhalten des Proportionalreglers mit: Vp = 1, 5 1 550ms 1 TG = 1, 5 = 1, 611 Vs TU 0, 813 630ms Die weiteren Widerstände ergeben sich bei festgelegten Kapazitäten nach folgenden Gleichungen: RT V TU 630ms = 0, 5 = 39, 37kΩ CT V 390pF + 8µF TU 630ms = 2 = 125, 99kΩ =2 CT N 1nF + 10µF = 0, 5 RT N Dabei wurden die Kapazitäten so gewählt, dass die Widerstände im Bereich der vorhanden Potentiometer lagen. Der Widerstand RV0 P ergibt sich aus der Formel für die Verstärkung eines invertierenden OVs und dem Verhältnis Vp : RV0 P = 1kΩ · Vp = 1kΩ · 1, 611 = 1, 611kΩ Der Widerstand des addierenden OVs am Ende des PID wurde mit RV P = 10kΩ festgelegt. 10 3.3 Realisierung & Optimierung Um den geschlossenen Regelkreis zu realisieren wurden die Regelstrecke und der PID-Regler kombiniert. Dazu wurde eine 28Hz-Rechteckspannung an die Leuchtdiode als Störsignal gelegt. Die Ausgangsspannung der Regelstrecke wurde mit einer 4V-Gleichspannung eines Spannungsversorgungsgerätes an einem weiteren OV verglichen. Dessen Ausgangsspannung wurde dann als Regelabweichung an den Eingang des PID-Reglers gelegt. Die Ausgangsspannung des PID ging dann als Stellgröße zurück in die Regelstrecke. Es sollte nun untersucht werden, ob der PID die Störung durch die Leuchtdiode ausgleichen könne. Dazu musste der Aufbau zuerst optimiert werden. Dies gestaltete sich jedoch als sehr schwierig, da der Regelkreis sehr schnell zu schwingen begann. Ein Grund dafür war eine sehr geringe Regelabweichung von nur etwa 50mV, da der Phototransistor nur sehr wenig Licht der Leuchtdiode registrieren konnte. Abbildung 9: geschlossenen Regelkreises - von oben nach unten: Stör-, Ist- und Stellgröße Letztendlich konnte jedoch ein zufriedenstellendes Ergebnis erzielt werden. Das in Abb. 9 dargestellte Oszillogramm zeigt von oben nach unten die Stör-, Ist- und Stellgröße. Man kann gut die schnelle Sprungantwort des D-Regler-Anteils in der Stellgröße auf den Anstieg der Störgröße erkennen. Aufgrund der wie schon erwähnten zu kleinen Amplitude der Störgröße, lassen sich leider die anderen Regleranteile in der Stellgröße nicht erkennen. Der Verlauf der Istgröße veranschaulicht nochmals das schnelle Reagieren des PIDs. Man erkennt zwar immer noch den Beginn einer Störung, doch insgesamt konnte die Störung fast vollständig entfernt werden. 11