Asynchronmotor - antriebstechnik.fh
Werbung

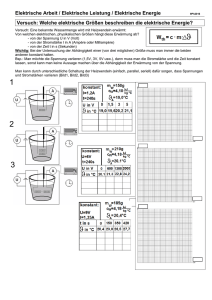
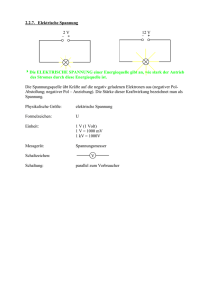
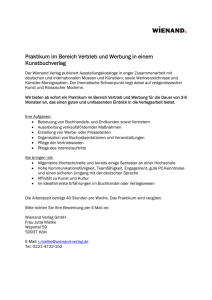
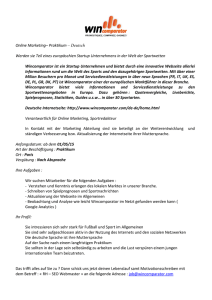
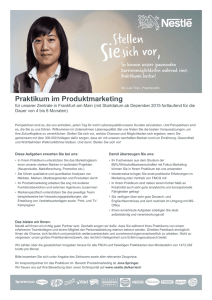
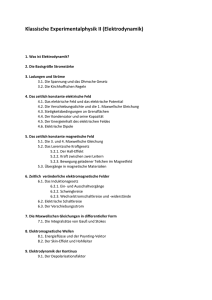
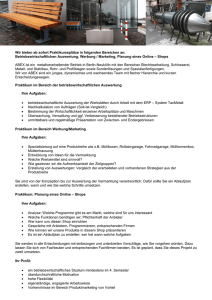
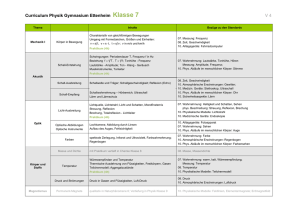
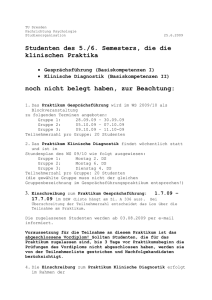
Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 Theoretische Grundlagen Im Leistungsbereich oberhalb 0,75 kW ("integral horsepower") sind etwa 90% der gefertigten elektrischen Maschinen Drehstromasynchronmaschinen (AsM). Asynchronmaschinen werden überwiegend als Motoren eingesetzt, hauptsächlich zum Antrieb von Pumpen, Lüftern, Kompressoren. Die größte wirtschaftliche Bedeutung haben in Europa 2p = 4- polige Niederspannungsasynchronmaschinen im Leistungsbereich zwischen 0,75 kW und 75 kW. AsM werden im Ständer mit einer Drehstromwicklung ausgeführt (in der Regel: symmetrische dreisträngige Wicklung , räumlicher Versatz der gleichartig aufgebauten Wicklungsstränge: 2π/m1p, m1 : Strangzahl, m1 = 3, p: Polpaarzahl). Je nach Läuferbauart werden AsM mit Käfigläufer und AsM mit Schleifringläufern unterschieden. Die Läuferwicklung besteht entweder aus in das Läuferblechpaket eingegossenen (Aluminium) oder eingeschlagenen (Kupfer) Stäben, die an den Enden durch Kurzschlußringe verbunden sind (Käfigläufer) oder aus drei symmetrisch angeordneten Wicklungssträngen (stets in Sternschaltung, Sternpunkt im Wickelkopf geschaltet), deren Enden auf Schleifringe geführt sind, die von außen beschaltet werden können (Schleifringläufer). Bei Anschluß der Ständerwicklung an ein symmetrisches Drehstromnetz entsteht im Luftspalt ein räumlich näherungsweise sinusförmig verteiltes Feld, dessen Maximum mit der konstanten Winkelgeschwindigkeit ω1 / p umläuft. Die zugehörige Drehzahl (5.1) n1 = f1 / p wird als synchrone Drehzahl bezeichnet. Das Luftspaltgrundfeld induziert in der Läuferwicklung Spannungen der Frequenz (5.2) f2 = s f1 mit s: Schlupf, s = (n1 - n) / n1, n: Drehzahl Die Spannungsgleichungen der AsM bei symmetrischer Speisung und Vernachlässigung der Eisen- und Reibungsverluste lauten (5.3a) U1 = (5.3b) 0 (R1 + jX1σ) I1 + jXh Iµ = [(R'2+R'v) / s + jX'2σ] I'2 + jXh Iµ Den Spannungsgleichungen entspricht das in Bild 5.1 gezeigte einsträngige Ersatzschaltbild, wobei zur Berücksichtigung der Eisenverluste ein Widerstand RFe parallel zur Hauptreaktanz eingezeichnet werden kann. In den meisten Betriebspunkten unterscheiden sich Ständer- und bezogener Läuferstrom nur wenig, so daß das Betriebsverhalten in guter Näherung durch das vereinfachte Ersatzschaltbild 5.2 beschrieben werden kann. Ständer- und bezogene Läuferstreureaktanz sind zur resultierenden Streureaktanz Xk zusammengefaßt. Xk = X1σ + X’2σ 32 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 Der Ständerwicklungswiderstand ist in den Läuferkreis eingezeichnet. I1 R1 X1σ X'2σ R'2 / s I' 2 Iµ Xh U1 R'V / s U'2 /s U1 Strangspannung R1 Wicklungswiderstand der Ständerwicklung (Strang) I1 Strangstrom (Ständer) R'2 Wicklungswiderstand der Läuferwicklung (bezogen) I'2 Läuferstrom (bezogen) X1σ Streureaktanz der Ständerwicklung Iµ Magnetisierungsstrom X'2σ Streureaktanz der Läuferwicklung (bezogen) s Schlupf R'V Vorwiderstand (bezogen, nur bei Schleifringläufern) Xh Hauptreaktanz Bild 5.1 Einsträngiges Ersatzschaltbild einer Drehstromasynchronmaschine Xk I1 R1 R'2 / s I' 2 Iµ U1 Xh R'V / s U'2 / s Bild 5.2 Vereinfachtes einsträngiges Ersatzschaltbild einer Asynchronmaschine (Bezeichnungen siehe Bild 5.1) Aus den Spannungsgleichungen kann mit Hilfe des Gesetzes über die Spaltung der Luftspaltleistung (5.4) Pδ = m1 I'22 R'2 / s = PCu2 + Pmech = s Pδ + (1-s) Pδ das Drehmoment als Funktion des Schlupfes berechnet werden. (5.5) Pmech M = = 2πn Pδ (1-s) = 2πn1 (1-s) Pδ 2πn1 Die Drehmoment- Drehzahl- Kennlinie besteht aus zwei Ästen und einem Übergangsbereich (siehe Bild 5.3): s « skipp: M(s) ≈ 2 Mkipp s / skipp s » skipp: M(s) ≈ 2 Mkipp skipp / s 33 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 mit dem Kippmoment Mkipp und dem Kippschlupf skipp. M/MN 5 4 Rechnung Näherungen 3 2 1 0 -0,2 -1 0 0,2 0,4 0,6 0,8 1 1,2 n/n1 -2 -3 -4 -5 Gegenstrombremsbereich Motorbereich Generatorbereich Bild 5.3 M- n- Kennlinie (Kloss’sche Formel), Näherungen (Darstellung für Mkipp = 2 MN, skipp = 0,1) Das Kippmoment beträgt bei vernachlässigbarem Ständerwicklungswiderstand (5.6) Mkipp = m1 ─── 2πn1 mit U1 U12 ──── 2 Xk (R1 = 0) Strangspannung Xk = X1σ + X'2σ resultierende Streureaktanz Das Kippmoment ist ein Maß für die Drehmomentüberlastbarkeit des Motors; es beträgt nach VDE 0530 Teil 12 mindestens Mkipp = 1,6 MN. Das Kippmoment ändert sich quadratisch mit der Spannung. Der Kippschlupf ist nur von der resultierenden Streureaktanz und vom Widerstand im Läuferkreis abhängig: (5.7) R'2 (+R'V) skipp = ────── Xk (R1 = 0) Aus den Spannungsgleichungen kann der Ständerstrom als Funktion des Schlupfes berechnet und in einer komplexen Ebene aufgetragen werden. Die Ortskurve des Ständerstroms ist ein Kreis (Bild 5.4). Bei Verwendung des vereinfachten einsträngigen Ersatzschaltbilds liegt der Kreismittelpunkt stets auf der imaginären Achse. 34 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 Motorbereich Pkipp, s = skipp U1 Pa Re( I 1 ) Pk , s = 1 Gegenstrombremsbereich P ,s= D e ϕ ung eist L en s = s1 isch n a h c rade me entge der m o s=0 e I'2 m d Dreh era A G rad rge I1 s = skipp ete ram P, s = s1 s = −R'2 / R1 B Iµ C P0 ,s = 0 E F −Im(I1) Generatorbereich AB ∼ m1 R'2 I'22 (Läuferverluste) BC ∼ m1 R1 I'22 PB ∼ Luftspaltleistung, Drehmoment PA ∼ mechanische Leistung (Ständerverluste) Bild 5.4 Stromortskurve mit Kenngeraden und Parametergerade Aus der Stromortskurve können mit Hilfe der Parametergeraden alle wichtigen Betriebsgrößen des AsM ermittelt werden, wie zum Beispiel Anlaufstrom IA und Anzugsmoment MA(s = 1) oder das Kippmoment Mkipp(s = skipp). a) Kenngeraden der Stromortskurve a1) Gerade der mechanischen Leistung Der Abstand vom jedem beliebigen Kreispunkt zur Gerade der mechanischen Leistung (= Verbindung zwischen P0 und Pk), senkrecht zur Imaginärachse gemessen, entspricht der mechanischen Leistung. a2) Drehmomentgerade Der Abstand vom jedem beliebigen Kreispunkt zur Drehmomentgerade (= Verbindung zwischen P0 und P∞), senkrecht zur Imaginärachse gemessen, entspricht dem Drehmoment. 35 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 a3) Parametergerade Jede beliebige Senkrechte auf der Verbindungslinie zwischen Kreismittelpunkt MP und dem "ideellen" Kurzschlußpunkt P∞ kann als Parametergerade dienen. Die Parametergerade ist linear geteilt. Der Schnittpunkt zwischen dem zu parametrierenden Kreispunkt und dem Punkt P∞ liefert den Parameter s dieses Betriebspunktes auf der Parametergerade. Zur Parametrierung (= Festlegung der Skala der Parametergerade) muß für zwei Kreispunkte der zugehörige Schlupf bekannt sein. b) Maßstäbe b1) Strom: mI: gewählt (Leiterstrom) Einheit: A/cm b2) Leistung: mP = √3 UN mI Einheit: W/cm b3) Drehmoment: mM = mP / (2πn1) Einheit: Nm/cm Zur Berechnung der Stromwärmeverluste in den Wicklungen (I'2: Leiterstrom): Y- Schaltung: PCu1 = m1 R1 I'22 PCu2 = m1 R'2 I'22 ∆- Schaltung: PCu1 = R1 I'22 PCu2 = R'2 I'22 Einzelverlustverfahren Wegen der relativ hohen Wirkungsgrade insbesondere größerer AsM ist die Wirkungsgradbestimmung durch direkte Messung von aufgenommener und abgegebener Leistung problematisch. Daher werden die einzelnen Verlustanteile ermittelt. Ständerstromwärmeverluste PCu1 = m1 R1W I1 2 R1W = R1k (1 + α∆ϑ) mit α: Temperaturkoeffizient des elektrischen Widerstands, α = 0,004 1/K ∆ϑ = 55/75 K für Wärmeklasse B/F, R1k: Kaltwiderstand bei 20oC mechanische Leistung Pmech = 2πn M Läuferstromwärmeverluste PCu2 = s / (1-s) Pmech Eisen- und Reibungsverluste PReib + PFe = P0 - m1 R1k I102 mit P0: aufgenommene Leistung der leerlaufenden Maschine I10: Zusatzverluste nach VDE 0530 Leerlaufstrangstrom Pzus = 0,005 PelN (I/IN)2 mit PelN: aufgenommene elektrische Leistung bei Bemessungsbetrieb η = Pmech Pmech + PCu1 + PCu2 + PFe + PReib + Pzus 36 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 Betriebsverhalten von Schleifringläufermotoren Das Betriebsverhalten von AsM mit Schleifringläufern kann durch das Einschalten von Vorwiderständen in den Läuferkreis variiert werden. Nach Gl. 5.3b ergeben sich mit Vorwiderstand beim Schlupf s* dieselben Betriebsdaten wie für RV = 0, wenn die Bedingung s* R2 + RV ── = ────── s R2 erfüllt ist. Bild 5.5 zeigt die Drehmoment- Drehzahl- Kennlinien eines Schleifringläufer- (5.8) motors mit verschiedenen Vorwiderständen. 4 R V = 6,6 R 2 M /M N R V = 2,6 R 2 RV = 0 3 R V = 16,9 R 2 2 1 0 0 0,2 0,4 0,6 0,8 n /n 1 1 Bild 5.5 Drehmoment- Drehzahl- Kennlinien eines Schleifringläufermotors (Parameter Vorwiderstand RV) Schleifringläufermotoren werden eingesetzt, - um den Anlaufstrom zu verringern und das Anlaufmoment zu erhöhen, - für Antriebe mit hohem Trägheitsmoment. Hierbei kann die in der Läuferwicklung beim Hochlauf entstehende Wärmemenge durch Einschalten von Vorwiderständen verringert werden. Eine wichtige Kenngröße der Schleifringläufermotoren ist die Läuferstillstandsspannung U20, die im Stillstand zwischen den offenen Schleifringen gemessen werden kann (Ständerwicklung an Bemessungsspannung). Die Läuferstillstandsspannung gestattet die näherungsweise Bestimmung des Übersetzungsverhältnisses. (5.9) R'2 ── R2 = ┌ UN │ ─── └ U20 ┐2 │ ┘ 37 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 Betriebsverhalten von Drehstrom- AsM am Wechselstromnetz Im Bereich kleiner Leistungen werden Asynchronmotoren häufig am Wechselstromnetz betrieben. Einsatzbereiche sind beispielsweise Pumpen für Waschmaschinen und Geschirrspüler, Antriebe für Wäschetrockner, Kreissägen, Rasenmäher usw. . Zur Bildung eines zeitlich konstanten Drehmoments ist im Luftspalt einer Asynchronmaschine ein möglichst sinusförmig verteiltes magnetisches Feld erforderlich, dessen Maximum mit konstanter Winkelgeschwindigkeit ω1 / p im Luftspalt umläuft. Bei Anschluß eines oder mehrerer Wicklungsstränge an ein Wechselstromnetz entsteht im Luftspalt jedoch nur ein Wechselfeld. Um Drehstrommotoren mit m1 = 3 gleichartigen Wicklungssträngen am Wechselstromnetz betreiben zu können, wird die sogenannte Steinmetzschaltung nach Bild 5.6 ausgeführt. UU = UN I IU IV UW ZZ UV bei Linkslauf IW IZ Bild 5.6 Steinmetzschaltung eines Drehstrommotors zum Betrieb am Wechselstromnetz Die Symmetriebedingung für die Ströme lautet (5.10) IV = IU e-j2π/3, IW = IU e-j4π/3 Für den Strom durch die Zusatzimpedanz ergibt die Knotenpunktregel IZ = IV − IW = −j√3IU, woraus sich für die Zusatzimpedanz die Bedingung (5.11) ZZ = UW = IZ UN e-j4π/3 -j√3IU 1 = √3 UN IU √3 [− 2 1 −j 2 ] ergibt. Wird die Motorimpedanz Z = UN/IU durch Z = R(s) + jX(s) ersetzt, so kann eine Bedingung für die Zusatzimpedanz abgeleitet werden. (5.12) ZZ = √3 1 1 [R(s) + jX(s)] − − j √3 2 2 [ 38 ] Praktikum Elektrische Maschinen = Versuch 5: Drehstromasynchronmaschine 1 −√3 1 R(s) + X(s) − j √3 2 2 1 [ 2 √3 R(s) + 2 Kremser 1998 X(s) ] Die Symmetrierung nur dann mit einer idealen Kapazität erfolgen, wenn der Realteil verschwindet: Re(ZZ) = 0 ⇒ R(s*) = X(s*) / √3 ⇒ tanϕHa = X(s*) / R(s*) = √3 ⇒ ϕ = −π/3 −j 1 √3 Im(ZZ) = −jXCB = R(s*) + X(s*) √3 2 2 1 √3 2 X(s*) XCB = + = X(s*) √3 2√3 2 3 Der Netzstrom beträgt (5.13) I = IU − IV = IU (1 − e−j2π/3) = √3 IU ejπ/6 = √3 UN / (Z(s*) ejπ/3 ) ejπ/6 = √3 UN / Z(s*) e-jπ/6 Der Netzleistungsfaktor im Symmetriepunkt ist also cos(−π/6) = √3/2. Für den Kondensatorstrom ergibt die Knotenpunktregel (5.14) IZ = IV − IW = IU (e−j2π/3− e−j4π/3) = √3IU e−jπ/2 = √3UN / (Z(s*) ejπ/3) e−jπ/2 = √3UN / Z(s*) e−j5π/6. Der Kondensatorstrom ist gleich dem Leiterstrom, d. h. bei symmetrischer Speisung gleich dem √3-fachen Strangstrom. Das Verhältnis zwischen der Kondensatorblindleistung QCB und der von der Maschine aufgenommenen Wirkleistung PW beträgt (5.15) UC IZ UN √3IU 2 QCB = = = PW 3 UN IU cosϕU 3 UN IU 0,5 √3 Wegen QCB = ωCBUN2 folgt die Bestimmungsgleichung für die erforderliche Kapazität CB = 2 PW 2 √3 ω UN Da sich die elektrisch aufgenommene und die mechanisch abgegebene Leistung nur durch den Wirkungsgrad unterscheiden (P = η PW ), kann die Kapazität des Symmetrierungskondensators auch mit Hilfe der mechanischen Leistung ausgedrückt werden: (5.16) CB 2P = η√3 ω UN2 Im Leistungsbereich zwischen 0,55 kW und 2,2 kW beträgt der Wirkungsgrad 4poliger Drehstromasynchronmotoren etwa η ≈ 75%. Für eine Netzspannung von UN = 230 V (∆) kann bei der Netzfrequenz von f1 = 50 Hz eine „Faustformel“ zur Bestimmung der Kapazität angegeben werden: 39 Praktikum Elektrische Maschinen CB P 93 µF ≈ kW Versuch 5: Drehstromasynchronmaschine Kremser 1998 (UN = 230 V (∆), f1 = 50 Hz) Im Symmetrierungspunkt beträgt die mechanische Leistung etwa 50% der Bemessungsleistung (I/IN ≈ 0,8, cosϕ/cosϕN ≈ 0,5/0,8). Daher kann die Symmetrierungskapazität überschlägig direkt aus der auf dem Leistungsschild angegebenen Bemessungsleistung berechnet werden: (5.17) 93 µF 0,5 47 µF CB ≈ = (UN = 230 V(∆), f1 = 50 Hz, Pmax ≈ 0,7 PN) kW kW PN Die durch die Maschinenerwärmung begrenzte maximale mechanische Leistung des Motors in Steinmetzschaltung ist etwa 70% der Bemessungsleistung bei Betrieb am Drehstromnetz. Beispiel: Drehstrommotor mit UN = 230 V(∆)/400 V(Y), PN = 1,5 kW: CB ≈ 1,5 kW 47 µF/kW = 70 µF, Pmax ≈ 0,7 1,5 kW ≈ 1 kW Der Schlupf im symmetrierten Betrieb ist kleiner als der Schlupf im Bemessungsbetrieb am Drehstromnetz. Im Anlauf (s = 1) bildet sich im allgemeinen ein stark unsymmetrisches Stromsystem mit der Folge eines verringerten Anzugsmoments aus. Bei Antrieben, die ein großes Anzugsmoment erfordern, wird daher parallel zum Betriebskondensator ein Anlaufkondensator geschaltet, der nach erfolgtem Hochlauf (zum Beispiel über ein Zeitrelais) abgeschaltet wird. Die Anlaufkondensatoren sind wegen des großen Einschaltstroms deutlich größer als die Betriebskondensatoren. Versuchsdurchführung 1. Daten des Typenschilds notieren, Bemessungsmoment (Nennmoment) MN berechnen 2. Widerstandmessung Messen Sie die Wicklungswiderstände von Ständer- und Läuferwicklung (R1k, R2k) sowie die Raumtemperatur ϑ1. 3. Läuferstillstandsspannung Messen Sie die Läuferstillstandsspannung (n = 0, zwischen je zwei Schleifringen, Ständerwicklung an Bemessungsspannung, Schleifringe offen). 4. Leerlaufmessung (U = UN) Mit Hilfe der Leerlaufmessung werden die Eisen- und Reibungsverluste bestimmt (wichtig für die Wirkungsgradbestimmung). Messen Sie bei unbelasteter Maschine den Leerlaufstrom I10 und die Leerlaufverluste P0. 40 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 5. Bestimmung des bezogenen Läuferwicklungswiderstands Belasten Sie die Maschine bei kurzgeschlossenen Schleifringen mit dem Bemessungsmoment MN (U = UN). Messen Sie Ständerstrom I1, die aufgenommene Wirkleistung PW und die Drehzahl n. Zeichnen Sie das Zeigerdiagramm für Bemessungsbetrieb (vergl. Betriebspunkt P in Bild 5.4). Anleitung: Verwenden Sie den Leerlaufstrom Iµ ≈ I10 aus der Leerlaufmessung 4., Bestimmen Sie die Richtung von I1 aus cosϕ = PW / (√3 U I1). Bestimmen Sie aus dem Zeigerdiagramm den Strom I'2. Berechnen Sie aus (Gl. 5.4), PCu2 = s / (1-s) Pmech = m1 R'2 I'22, den bezogenen Läuferwicklungswiderstand. Hinweis: Diese Methode der Bestimmung des Läuferwicklungswiderstands kann auch bei Käfigläufermotoren angewandt werden. 6. Belastungsmessung 6.1 Betrieb am sinusförmigen Netz (Schaltung nach Bild 5.7, Seite 46) a) U = UN, ohne Vorwiderstand (RV = 0) und mit zwei verschiedenen Vorwiderständen (RV1, RV2). Messen Sie bei Bemessungsspannung die Drehzahl bei verschiedenen motorischen Belastungen (n = f(M), einschließlich Leerlauf (M = 0)) ohne bzw. mit Vorwiderstand. Ermitteln Sie bei der Messung ohne Vorwiderstand die Belastung, bei der der Leistungsfaktor cosϕ = 0,5 beträgt und messen Sie Drehzahl, Drehmoment, Ständerstrom sowie die elektrisch aufgenommene Leistung. b) U = UN/√3 (Y), RV = 0 Messen Sie bei reduzierter Spannung, Drehzahl, Ständerstrom und Leistungsfaktor als Funktion des Drehmoments (motorisch und generatorisch). 6.2. Bestimmung der Wicklungserwärmung Messen Sie nach den Messungen 6.1 die Wicklungswiderstände der Ständerwicklung. Anleitung: Setzen Sie zeitgleich mit dem Abschalten der Maschine die Stoppuhr in Gang. Führen Sie unmittelbar nach dem Abschalten (erste Messung möglichst innerhalb von 20...30 s nach dem Abschalten!) während einer Zeit von etwa 5 min nach Abschalten der Maschine mehrere Widerstandsmessungen durch und notieren Sie zu jeder Messung die Zeit. 6.3 Betrieb am Wechselstromnetz in Steinmetzschaltung (Prinzipschaltung Bild 5.8, Seite 47, Meßschaltung mit Anschluß des Leistungsmeßgeräts Bild 5.9, Seite 48) Hinweis: Zur zügigen Versuchsdurchführung soll der untersuchte Schleifringläufer auch für den Betrieb in Steinmetzschaltung verwendet werden. Wegen des 41 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 geringen Anzugsmoments müssen zum Anlauf entweder Vorwiderstände in den Läuferkreis geschaltet werden, oder es ist ein Anlaufkondensator parallel zum Betriebskondensator zu verwenden, der nach erfolgtem Hochlauf sofort abzuschalten ist. Bei direktem Einschalten unter Verwendung des Anlaufkondensators ist mit großen Strömen und damit mit starker Erwärmung der Maschine zu rechnen! Bestimmen Sie zunächst überschlägig die Kapazität des Betriebskondensators nach Gl.(5.17) (Bemessungsspannung des Motors beachten!). Belasten Sie die Maschine, bis der Leistungsfaktor in den drei Strängen jeweils etwa 0,5 beträgt. Optimieren Sie in diesem Betriebspunkt die Betriebskapazität (möglichst geringe Abweichungen zwischen den Leistungsfaktoren und Strömen der drei Wicklungsstränge). Ermitteln Sie anschließend durch Entlastung das kleinstmögliche thermisch zulässige Drehmoment Mthmin (max(IU, IV, IW ) = IN) , Meßwerte der Ströme beobachten, Grenze ist erreicht, wenn einer der Strangströme den Bemessungsstrom erreicht) und analog durch Belastung das größte thermisch zulässige Drehmoment Mthmax (max(IU, IV, IW ) = IN). Messen Sie bei konstanter Spannung im Symmetrierungspunkt sowie für M = Mthmin, M = Mthmax - die Strangströme IU, IV und IW , - die elektrisch aufgenommenen Leistungen PelU, PelV und PelW , - die Strangspannungen UU, UV und UW , - die Drehzahl n. Versuchsauswertung 2. Berechnen Sie die mittleren Wicklungswiderstände R1k bzw. R2k eines Ständer- bzw. Läuferwicklungsstranges bei Raumtemperatur. 3. Ermitteln Sie das Übersetzungsverhältnis (Gl. 5.9) und den bezogenen Läuferwiderstand R’2. 4. Ermitteln Sie die Eisen- und Reibungsverluste für Bemessungsbetrieb (U = UN, n = nN). 5. Vergleichen Sie den aus Gleichstrommessung und Übersetzungsverhältnis bestimmten bezogenen Läuferwicklungswiderstand mit dem aus der Belastungsmessung für M = MN ermittelten. 6.1 a) Zeichnen Sie die Drehmoment- Drehzahl- Kennlinien M = f(n) für U = UN ohne bzw. mit Vorwiderstand (RV1, RV2) sowie für U = UN/√3 (Y), RV = 0 in ein Diagramm. Diskutieren Sie die Kennlinienverläufe. 42 Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 6.1 b) Zeichnen und parametrieren Sie die Stromortskurve für U = UN/√3 (Y), RV = 0. Anleitung zur Parametrierung: Berechnen Sie - die Streureaktanz Xk aus dem Kreisdurchmesser I∅ = I'2(s = −R'2 / R1): Xk = U1Strang/I∅Strang - die Hauptreaktanz Xh aus dem Leerlaufstrom I10: Xh = U1Strang/I10Strang Berechnen Sie für U = UN/√3 (Y) den Anlaufstrom IA = I1(s = 1) und den ideellen Kurzschlußstrom I1∞ = I1 (s = ∞) mit Hilfe des vereinfachten einsträngigen Ersatzschaltbilds und zeichnen Sie die Punkte Pk (s = 1) und P∞ (s = ∞) in die Stromortskurve ein. Ermitteln Sie mit Hilfe der Stromortskurve das Anzugsmoment und das Kippmoment und rechnen Sie diese sowie den Anlaufstrom auf volle Spannung um. Geben Sie die Größen als Relativwerte an: mA = MA / MN, iA = IA / IN, mkipp = Mkipp / MN. Ermitteln Sie das bezogene Anzugsmoment mA und den bezogenen Anlaufstrom iA mit Vorwiderstand (RV1, RV2). 6.1c) Zeichnen Sie mit Hilfe der Stromortskurve die Strom- Drehzahl- Kennlinie sowie die Drehmoment- Drehzahl- Kennlinie (U = UN/√3 (Y), 0 < n < n1). Tragen Sie zusätzlich die Meßwerte für Strom und Drehmoment aus 6.1b) in das Diagramm ein. Bestimmen Sie für Bemessungsbetrieb (U = UN, M = MN, RV = 0) den Wirkungsgrad nach dem Einzelverlustverfahren. 6.2 Tragen Sie die nach dem Abschalten gemessenen Wicklungswiderstände über der Zeit auf und ermitteln Sie durch Interpolation bzw. Extrapolation die Widerstände R1W zu den Zeitpunkten t = 30 s (entspr. VDE 0530 T 1) bzw. t = 0 (Abschaltzeitpunkt). Bestimmen Sie die zugehörigen Wicklungserwärmungen aus der Beziehung ϑ2 + 235 K R1W = ϑ1 + 235 K R1k ϑ2: Temperatur nach dem Abschalten (t = 0, t = 30 s) ϑ1: Raumtemperatur (Messung 2.) 6.3 Vergleichen Sie die meßtechnisch ermittelte optimale Kapazität mit der überschlägig berechneten. Beschreiben Sie die zum zügigen Anlauf verwendete Schaltung (Vorwiderstände und/oder Anlaufkondensator). Berechnen Sie für alle drei Betriebspunkte die abgegebene mechanische Leistung. Zeichnen Sie das Zeigerdiagramm aller Spannungen und Ströme im Symmetrierungspunkt (einschließlich Kondensatorstrom IC und Netzstrom I). 43 Versuch 5: Drehstromasynchronmaschine Kremser 1998 V N L3 L2 L1 400 V 50 Hz~ ~ Stelltrafo power analyser CH1 CH2 CH3 Bild 5.7 Drehstromasynchronmotor am Netz: Schaltung 44 U2 V2 W2 M U1 V1 W1 K L M RV G Praktikum Elektrische Maschinen Versuch 5: Drehstromasynchronmaschine Kremser 1998 W2 CH3 N (L3*) L (L2*) U 50 Hz V2 V1 W1 CH2 I U2 IC U1 CH1 Praktikum Elektrische Maschinen Bild 5.8 Steinmetzschaltung: Schaltbild (mit dreiphasigem Wattmeter zur Messung der Strangleistungen, Rechtslauf) 45 Versuch 5: Drehstromasynchronmaschine Kremser 1998 CH2 I CH3 N L3 L2 L1 U I U 400 V power analyser 50 Hz U CH1 I A I L2* L3* V1 Bild 5.9 Steinmetzschaltung: Anschluss des Leistungsmessgerätes 46 C W1 V2 U2 U1 W2 IC Praktikum Elektrische Maschinen