• Hier geht es um die Ursachen für die Änderung des
Werbung

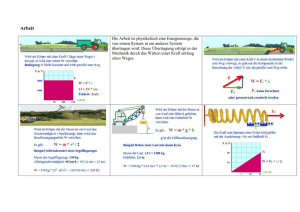
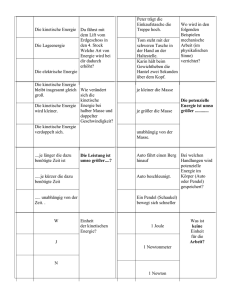
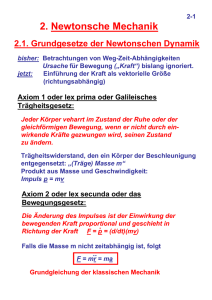
• Hier geht es um die Ursachen für die Änderung des Bewegungszustandes eines Massenpunktes: Die Kräfte F • Messen von Kräften: Nur indirekt möglich, zum Beispiel über Deformation Zusammensetzung und Komponentenzerlegung von Kräften • Da Kräfte Vektoren sind, können sie vektoriell addiert und umgekehrt in Komponenten zerlegt werden Das erste Newtonsche Axiom • Das erste Newtonsche Axiom besagt, dass ein Körper im Zustand der Ruhe oder im Zustand der gleichförmig geradlinigen Bewegung bleibt, wenn die (vektorielle) Summe aller Kräfte auf ihn null ist • Das erste Newtonsche Axiom gilt nur in Inertialsystemen! • Das erste Newtonsche Axiom wird auch als Trägheitsprinzip bezeichnet Das zweite Newtonsche Axiom • Der einfachste Zusammenhang zwischen Kraft und Beschleunigung wäre die Proportionalität: F ∝ a • Genau dieser Zusammenhang wird aber beobachtet, wobei die Proportionalitätskonstante gerade die Masse m ist • F = ma oder, da die Beschleunigung ein Vektor ist, F~ = m~a • Damit können wir die Einheit der Kraft angeben: [F ] = kg sm2 =: Newton(N) • Das zweite Newtonsche Axiom wird auch als Aktionsprinzip bezeichnet M34 21 Das dritte Newtonsche Axiom • Schliesslich ist es offensichtlich, dass, wenn ein Körper A mit der Kraft F~AB auf den Körper B einwirkt, dieser mit einer gleich grossen, aber entgegengesetzt gerichteten Kraft auf den Körper A zurückwirkt: • F~AB = −F~BA • Dieses dritte Newtonsche Axiom ist unter dem Begriff Actio=Reactio oder Reaktionsprinzip bekannt M48 • Das erste Newtonsche Axiom hat zur Folge, dass wir, wenn wir uns in einem System befinden, nicht sagen können, ob dieses sich in Ruhe oder in gleichförmig geradliniger Bewegung befidet: solche Systeme (geradlinig gleichförmig sich bewegende) nennt man Inertialsysteme • Aus dem zweiten und dritten Newtonschen Axiom folgt, dass auf eine Masse in einem beschleunigten Bezugssystem eine Kraft, die Trägheitskraft wirkt • Beispiel Kreisbewegung: Wenn wir in einem Auto sitzen, das eine Kurve fährt, so ist dies ein beschleunigtes Bezugssystem, wobei die Beschleunigung in Richtung Kurvenmittelpunkt zeigt. Auf uns (Masse) wirkt eine Trägheitskraft, die der Beschleunigung entgegen gerichtet ist (Zentrifugalkraft) • Um das Auto um die Kurve zu lenken, muss von der Strasse eine Kraft auf das Auto ausgeübt werden, die zum Kurvenmittelpunkt zeigt (Zentripetalkraft) 22 v FZP=mAa FZF=-mPa • Ganz analog ist es beim geradlinigen Beschleunigen (Bremsen), es muss Kraft von der Strasse auf das Auto übertragen werden, und wenn wir in dem Auto sitzen (beschleunigtes Bezugssystem), spüren wir eine Trägheitskraft M67, M68 2.4.2 Beispiele für Kräfte Die Gravitationskraft • Aus der Auswertung der Planetenbewegung fand Newton folgenden Zusammenhang zwischen der Masse zweier Körper und der Kraft zwischen ihnen: • F~G ∝ m1 m2~er r2 = −G m1 rm22~er , • wobei ~er der Einheitsvektor in Richtung der Verbindungslinie beider Massen ist. Die Masse im Gravitationsgesetz (die schwere Masse) muss zunächst nicht zwangsläufig mit der Masse im zweiten Newtonschen Axiom identisch sein. Die Äquivalenz der trägen und der schweren 23 Masse ist eine zentrale Aussage der allgemeinen Relativitätstheorie, die bisher experimentell nicht widerlegt wurde • Herleitung 3. Keplersches Gesetz Schwerkraft auf der Erde: • m2 ist die Erdmasse, r ist der Erdradius • damit wird der Betrag der Gewichtskraft FG = m1 E Gm re2 • Ausdruck in Klammern hat die Dimension einer Beschleunigung: Erdbeschleunigung Abgeleitete Kräfte • Im Alltag begegnen uns sehr viele Kräfte: Muskelkraft, Reibungskraft, Federkraft • Alle diese Kräfte sind im Prinzip auf das Wirken elektrischer Kräfte zurückzuführen, was allerdings zu extrem komplexen funktionalen Zusammenhängen führen würde • Einige der Kräfte lassen sich jedoch mit recht einfachen (empirisch ermittelten) funktionalen Zusammenhängen beschreiben Die Elastische Kraft • Die elastische Kraft wird durch folgenden funktionalen Zusammenhang zwischen Auslenkung ~x und Kraft F~ beschrieben: • F~ = −D~x • Das heisst, die Kraft ist proportional zur Auslenkung und dieser entgegen gerichtet M38 24 • Die Proportionalitätskonstante D wird als Federkonstante bezeichnet, da metallische Federn recht gut durch ein elastisches Kraftgesetz beschrieben werden • Der Zusammenhang zwischen elastischer Kraft und Auskenkung wird als Hookesches Gesetz bezeichnet • Die elastische Kraft wird auch als harmonische Kraft bezeichnet, da sie, wie wir später erfahren werden, zu harmonischen Schwingungen führt Die Reibungskraft • Wenn wir einen Gegenstand gegen einen anderen verschieben, müssen wir eine Kraft aufwenden, die Reibungskraft • Es treten zwei Reibungskräfte auf, die Haftreibungskraft, die ich überwinden muss, um den Gegenstand zunächst in Bewegung relativ zum anderen zu versetzen, und die Gleitreibungskraft, um den Gegenstand im Zustand der Bewegung zu halten M116 • Die Erfahrung lehrt uns, dass die Reibungskraft um so grösser ist, je grösser die Kraft ist, die beide Gegenstände zusammenhält. Experimentell wird eine Proportionalität zwischen der Normalkraft, das ist die Kraft, die senkrecht auf der Kontaktfläche steht, und der Reibungskraft gefunden: • F~R ∝ F~N , F~R = µF~N • Die Proportionalitätskonstante µ wird Reibungskoeffizient genannt, wobei man zwischen Haftreibungskoeffizienten µH und Gleitreibungskoeffizienten µG unterscheidet • Anmerkung 1: Die Gleitreibungskraft ist unabhängig von der Relativgeschwindigkeit • Anmerkung 2: Die Reibungskraft ist unabhängig von der Kontaktfläche 25 • Anmerkung 3: Der oben hergestellte Zusammenhang gilt einigermassen exakt für harte Körper, bei verformbaren Körpern treten zum Teil deutliche Abweichungen auf (Autoreifen!) • Beispiel: Geneigte Ebene • Komponentenzerlegung der Gewichtskraft • Normalkraft: FN = G cos α und damit Reibungskraft FR = µG cos α • Hangabtribskraft FA = G sin α • Der Körper beginnt zu gleiten, wenn die Hangabtriebskraft grösser als die Haftreibungskraft ist: • G sin α ≥ µH G cos α, woraus der Grenzwinkel für das Abrutschen folgt: sin αG µH = cos = tan αG αG F-N FR FA α FN G α M36 • Da der Gleitreibungskoeffizient stets kleiner als der Haftreibungskoeffizient ist, ist die Bewegung anschliessend eine beschleunigte! 26 2.4.3 Die Bewegungsgleichung • F~ = m~a kann als Bewegungsgleichung in dem Sinn aufgefasst werden, dass man bei Kenntnis aller (orts- und zeitabhängigen) Kräfte die Bewegung eines Massenpunktes berechnen kann 2 • Da ~a = ddt2~x , ist die Bewegungsgleichung eine Differentialgleichung: 2 F~ (x, t) = m ddt2~x • Die exakte Lösung dieser Differntialgleichung ist nur für einfache For~ erhalten wir zum Beispiel men von F~ (x, t) möglich, bei F~ = const ~ 2 F t , ein weiteres Beispiel werden wir bei der harmo~r(t) = ~r0 + ~v0 t + m nischen Schwingung kennenlernen 2.5 Arbeit und Energie • Wir wenden jetzt eine Kraft auf einen Massenpunkt über einen bestimmten Weg an • Die dabei erhaltene Grösse nennen wir mechanische Arbeit ∆W := R F~ ∆~s oder genauer: W = F~ d~s • Kraft und Weg sind vektorielle Grössen • offensichtlich haben wir es wieder mit einem Produkt von Vektoren zu tun, doch das Ergebnis ist diesmal ein Vektor Einschub: Skalarprodukt von Vektoren ~a~b Ergebnis ist ein Skalar mit dem Betrag ab cos ^~a, ~b 2 • Die Arbeit hat die Einheit [W ] = kg ms2 := Joule(J) • Arbeit ist immer in Bezug auf ein System definiert (hier der Massenpunkt) 27 • Was passiert, wenn wir Arbeit an einem Massepunkt verrichten: – Beispiel 1: Wir heben einen Körper an. Der Körper hat jetzt das Potential, sich unter der Wirkung der Schwerkraft nach unten zu bewegen und dabei Arbeit zu verrichten. Man sagt, er hat potenR tielle Energie Epot . Die Arbeit berechnet sich nach W = Gdh = R G dh = Gh – Beispiel 2: Wir spannen eine Feder. Die Arbeit berechnet sich R R nach W = Dxdx = D xdx = 21 Dx2 Die gespannte Feder hat ebenfalls potentielle Energie Epot – Beispiel 3: Wir beschleunigen einen Körper aus der Ruhelage, indem wir eine Kraft auf ihn ausüben. Die Arbeit berechnet sich R R nach W = madx = ma dx = max = ma a2 t2 = m2 v 2 Wir sagen, dass der Körper jetzt Bewegungsenergie oder kinetische Energie Ekin besitzt R – Wir bewegen einen Körper gegen die Reibungskraft. W = FR dx = R FR dx = FR x. Wo ist die Arbeit verschwunden? Werden wir noch sehen. • Die Erfahrung lehrt, dass Energie nicht erzeugt werden oder verloren gehen, sondern nur in andere Formen umgewandelt werden kann, das heisst, dass in einem abgeschlossenen System (kein Teilchen- und Energieaustausch) die Gesamtenergie Eges = Epot + Ekin + ... eine Erhaltungsgrösse ist. • Potentielle Energie ist immer an das Vorhandensein von Kräften gebunden • Für die Potentielle Energie in Abhängigkeit vom Ort verwendet man den Begriff Potential • Aus E(x) kann F (x) durch Ableitung gewonnen werden: F (x) = dE(x) ∂ dx ∂x ∂ ~ ~ ~ oder im Raum F (~r) = ∇E(~r), wobei ∇ für den Vektor steht. ∂y ∂ ∂z 28 Man sagt zu dem rechten Term Gradient von E Beispiel Pendel: • An den Umkehrpunkten hat das Pendel nur potentielle Energie, am tiefsten Punkt ist diese (bei geeigneter Wahl des Nullpunktes) vollständig in kinetische Energie umgewandelt worden M47 h Epot=mgh Ekin=mv2/2 Eges=Ekin+Epot=konst 29 • Damit können wir zum Beispiel bei bekannter Höhe h die Geschwin√ digkeit im tiefsten Punkt berechnen: mgh = m2 v 2 ⇒ v = 2gh • Offensichtlich ist das genau die gleiche Geschwindigkeit, die ein frei fallender Körper nach einem Fall aus der Höhe h erreicht, was nicht verwundert, da beim idealen Pendel keine Energie in andere Formen als die kinetische Umgewandelt wird Beispiel schiefe Ebene: • Am Fusse der schiefen Ebene hat der Massenpunkt. wenn er sich reibungsfrei bewegt, eine kinetische Energie, die der potentiellen Energie beim Starten entspricht Epot=mgh h Ekin=mv2/2 • Die Geschwindigkeit hängt wiederum nicht vom Weg ab, solange nur die Energieformen potentielle Energie und kinetische Energie auftreten 2.5.1 Leistung, Wirkung • Als Leistung definieren wir P := für Watt dW dt mit der Einheit [P ] = kgms−3 = W • Bsp: Wie schnell beschleunigt ein Auto mit 200 PS, das 1.5 Tonnen wiegt, theoretisch auf 100 km/h? 30 • Es wird Beschleunigungsarbeit in einer bestimmten Zeit verrichtet: • ∆W = m (∆v)2 , 2 P = ∆W ∆t ⇒ ∆t = ∆W P ≈4s • Warum braucht mein Auto länger (ca 7 s)? Weil die 200 PS die Spitzenleistung sind, während die mittlere Leistung weit niedriger ist • Als Wirkung H definieren wir H := R W dt = R p ~ d~x 2 • In der Quantenmechanik werden wir sehen, dass die Wirkung in der Natur nur diskrete Zustände annehmen kann 2.6 Kraftstoss und Impuls • Betrachten wir zwei Körper, die eine Zeit ∆t Kontakt miteinander haben und dabei nach dem Reaktionsprinzip gegenseitig eine Kraft ausüben: • F~AB = −F~BA , also F~AB + F~BA = 0 und unter Anwendung des 2. Axioms ~A ~B V V mA ∆∆t + mB ∆∆t =0 • Wir können jetzt die Gleichung mit ∆t multiplizieren und erhalten mA (~vA1 − ~vA0 ) + mB (~vB1 − ~vB0 ) = 0 31 • Die Grösse m~v nennen wir Impuls p~ := m~v • Stellen wir obige Gleichung so um, dass links nur Zeiten 0 und rechts nur Zeiten 1 stehen, so erhalten wir • mA~vA1 + mB ~vB1 = mA~vA0 + mB ~vB0 • Auf der linken Seite steht die Summe der Impulse nach dem Stoss, auf der rechten Seite vor dem Stoss M128 Offensichtlich bleibt der Gesamtimpuls erhalten Beispiel elastischer Stoss (Energie- und Impulserhaltung!) • Wir betrachten zwei Kugeln gleicher Masse, von denen die eine auf die andere (ruhende) zunächst zentral auftreffe, die Geschwindigkeiten vor dem Stoss seien v1 und v2 , danach u1 und u2 • Impulserhaltung mv1 = mu1 + mu2 • Energieerhaltung m 2 v 2 1 = m 2 u 2 1 + m 2 u 2 2 • Nach kurzer Rechnung sieht man: u1 = 0 und u2 = v1 • Allgemein gilt: u1 = u2 = (m1 − m2 )v1 + 2m2 v2 m1 + m2 (m2 − m1 )v2 + 2m1 v1 m1 + m2 M128 2.7 2.7.1 Dynamik der Kreisbewegung Kinetische Energie der Kreisbewegung • Wir betrachten zwei masselose Scheiben, wobei über der Scheibe mit dem Radius r1 eine Seil läuft, an dem eine Kraft F wirkt, und am Rande der Scheibe zwei mit dem Radius r2 befinde sich ein Massenpunkt 32 • Für die verrichtete Arbeit gilt: W = F ϕr1 , und die kinetische Energie des Massenpunktes ist Ekin = m2 v 2 = m2 r2 ω 2 2.7.2 Drehmoment und Trägheitsmoment • Um eine zur geradlinigen Beschleunigung F s = m2 v 2 analoge Beziehung in den Winkeln bzw. Winkelgeschwindigkeiten zu bekommen, definieren wir als Drehmoment M := F r und als Trägheitsmoment J := mr2 und erhalten M ϕ = J2 ω 2 • Ableitung nach der Zeit ergibt: • M ϕ̇ = M ω = J2 2ω ω̇ ⇒ M = J ω̇ ganz analog zu F = ma = mv̇ 2.7.3 Drehimpuls • Schliesslich erhalten wir durch Integration über die Zeit den Drehimpuls: • L := R M dt = Jω • Der Drehimpuls ist wie der Impuls eine Erhaltungsgrösse ~ = J~ω • Der Drehimpuls ist eine vektorielle Grösse: L 2.7.4 Trägheitskräfte im rotierenden Bezugssystem • Rotierendes Bezugssystem ist ein beschleunigtes, also kein Inertialsystem → Trägheitskräfte 33 Zentrifugalkraft • Trägheitskraft auf Körper, der bezüglich rotierendem Bezugssystem in Ruhe • Beispiele: Kind auf Karussell, Personen im Auto etc. Corioliskraft • Trägheitskraft auf Körper, der sich im rotierenden Bezugssystem geradlinig bewegt, und zwar in radialer Richtung • Drehimpulserhaltung fordert, dass Winkelgeschwindigkeit sich mit r ändert • oder anders: Tangentialgeschwindigkeit ändert sich bei Änderung von r, also muss es eine Tangentialbeschleunigung geben • Die scheinbare Kraft, die diese Beschleunigung verursacht, ist Trägheitskraft • Beispiel Tornado, Hurrican: wenn Luft, die infolge der Erdrotation rotiert, in einem Tiefdruckgebiet zusammenströmt, muss der Drehimpuls erhalten bleiben. Da aber J abnimmt (r nimmt ab), steigt die Winkelgeschwindigkeit an! Ähnlich: Strudel in der Badewanne • Auch Eisenbahn, die in Nord-Süd-Richtung fährt, erfährt Corioliskraft, ausser am Äquator (warum?) Zusammenfassende Gegenüberstellung Translation – Rotation Tabelle 34 Translation Rotation Ortsvektor ~r Drehwinkel ϕ Geschwindigkeit ~v = dr̃/dt Winkelgeschwindigkeit ω ~ = dϕ/dt (~rˆ × ~vˆ) Beschleunigung ~a = d~v /dt = d2~r/dt2 Winkelbeschleunigung ω ~˙ = d2 ϕ/dt2 (ω ~ˆ × ~vˆ) Masse m Trägheitsmoment I (z) Impuls p~ = m~v Drehimpuls ~ = I (z) ω L ~ Kraft F~ = m~a = d~ p/dt Drehmoment ~ = I (z) ω ~ M ~˙ = dL/dt Kinetische Energie Wtrans = mv 2 /2 = p2 /2m Kinetische Energie Wrot = I (z) ω 2 /2 = L2 /2I (z) Ortstrajektorie Kreistrajektorie ϕ(t) = (dω/dt)t2 /2 + ω0 t + ϕ0 ~r(t) = (d~v /dt)t2 /2 + ~v0 t + ~r0 2.8 Die Mechanik des starren Körpers • Ein starrer Körper ist eine Ansammlung von Massenpunkten, deren gegenseitige Lage genau festgelegt ist. Damit können wir die Lage aller Massenpunkte durch den Ortsvektor eines ausgezeichneten Punktes und durch Angabe zweier weiterer, nicht koplanarer Vektoren festlegen • Die vollständige Beschreibung der Bewegung eines starren Körpers ist demnach durch die Angabe der Translation eines ausgezeichneten Punktes und Rotationen um diesen Punkt möglich 35 2.8.1 Massen-Dichte • Als Massen-Dichte (oft kurz Dichte) eines Körpers % wird der Quotient aus Masse und Volumen bezeichnet: % := m oder, wenn wir einen V inhomogenen Körper haben, % = dm dV 2.8.2 Schwerpunkt oder Massenmittelpunkt • Als Schwerpunkt oder Massenmittelpunkt eines Körpers bezeichnen wir den Punkt, an dem jede beliebige angreifende Kraft lediglich eine beR schleunigte Translation verursacht: ~rS = m1 %(~r)~rdV • Bezüglich der Translation können wir einen starren Körper so behandeln, als sei er eine Punktmasse am Ort des Massenmittelpunktes M53 36 2.8.3 Die Rotation des starren Körpers • Wir hatten bereits das Trägheitsmoment einer Punktmasse bezüglich Rotation eingeführt: J = mr2 • Um das Trägheitsmoment eines starren Körpers zu ermitteln, müssen wir lediglich die Trägheitsmomente aller Punktmassen, aus denen er P sich zusammensetzt, aufsummieren: J = mi ri2 oder, wenn wir infeR R nitesimal kleine Massenpunkte nehmen J = r2 dm = %(~r)r2 dV • Ganz offensichtlich hängt J davon ab, wie wir die Drehachse wählen • Genau genommen ist J ein Tensor, eine Grösse, die wir durch eine Matrix darstellen • Einige Beispiele: Körper Lage der Drehachse Trägheitsmoment Dünner kreisförmiger Reifen Kreisachse M R02 Dünner kreisförmiger Reifen Durchmesser Kreisförmige Scheibe Kreisachse Hohlzylinder, Innendurchmesser Ri Kreisachse Kugel Durch Mittelpunkt 1 M 2 1 M R02 2 1 M R02 2 (R02 + Ri2 ) 2 M R02 5 • Wir können jetzt den Newtonschen Axiomen analoge Aussagen für die Rotation treffen: • Ein starrer Körper wird solange in Ruhe oder gleichförmiger Rotation verharren, wie die Summe aller Drehmomente gleich Null ist • Die Ursache der Änderung des Rotationszustandes ist das Drehmo~ = Jω ment: M ~˙ M58 • Ein starrer Körper wird ohne die Einwirkung äusserer Kräfte stets um seinen Massenmittelpunkt rotieren. Das ist sofort einleuchtend, wenn man sich vergegenwärtigt, dass die Bahn eines solchen Körpers eine Gerade sein muss und dass die Bahnkurve vom Schwerpunkt beschrieben wird 37 • Anders herum: Um Rotation nicht um Schwerpunkt zu ermöglichen, ist Kraft notwendig • statische Umwucht: Drehachse nicht durch Schwerpunkt → Schwerpunkt rotiert → Zentrifugalkraft • dynamische Umwucht: Drehachse zwar durch Schwerpunkt, aber nicht in Symmetrieachse → Zentrifugalkräfte, die nicht am Schwerpunkt angreifen und in der Summe Null ergeben: Drehmoment auf die Achse, dessen Richtung mitrotiert Hauptträgheitsachse • Hauptträgheitsachsen sind die Rotationsachsen eines Körpers, die zu einer kräfte- und drehmomentfreien Rotation führen • Jeder starre Körper hat drei zueinander senkrechte HT-Achsen • Die HT-Achsen mit dem kleinsten bzw. grössten Trägheitsmoment sind stabile Rotationsachsen Satz von Steiner • Das Trägheitsmoment J um eine Achse, die parallel zu einer durch den Massenmittelpunkt verlaufenden Drehachse liegt, ist gegeben durch die Summe des Trägheitsmomentes um diese Schwerpunktachse Js und der Masse M des Körpers multipliziert mit dem Quadrat des Abstandes h: J = Js + M h 2 • Anwendung: Berechnung des Trägheitsmomentes einer Scheibe um eine Randachse: • J = 21 M R02 + M R02 = 32 M R02 • Satz über senkrechte Achsen 38 • Für zweidimensionale Körper gilt (Körper liegt in x − y Ebene): Jz = Jx + Jy • Anwendung: Berechnung Trägheitsmoment einer kreisförmigen Scheibe mit Durchmesser als Drehachse: Jz = 21 M R02 , aus Symmetriegründen muss gelten Jx = Jy , damit Jx = Jy = 41 M R02 Kreisel • Als Kreisel bezeichnen wir einen rotationssymmetrischen Körper, der an einem Punkt im Raum fixiert ist, sich aber in alle Richtungen drehen kann • ohne äussere Kräfte dreht sich der Kreisel um seine Hauptträgheitsachse Nutation • Stossen wir kurz an den Kreisel, geben wir ihm also einen Drehimpuls senkrecht zur Kreiselachse, so ist der neue Drehimpuls nicht mehr parallel zur Hauptträgheitsachse • Die Hauptträgheitsachse rotiert jetzt mit ω Präzession • Wirkt ein Drehmoment senkrecht zur Kreiselachse, so muss gemäss ~ = dL/dt ~ M die Änderung des Drehimpulses in Richtung des Drehmomentes zeigen • Der Kreisel weicht senkrecht zur wirkenden Kraft aus 39 2.8.4 Die Kinetische Energie der Rotation des Starren Körpers • Starrer Körper hat nicht nur kinetische Energie der Translation, sondern auch der Rotation: 1 rot Ekin = Jω 2 2 • Rollt zum Beispiel eine Kugel eine schiefe Ebene herab, so wird die potentielle Energie umgewandelt in kinetische Energie: 1 1 rot trans mgh = Ekin + Ekin = Jω 2 + mv 2 2 2 2.8.5 Die Statik des starren Körpers Der Hebel • Wir betrachten als starren Körper einen Hebel mit einem Drehpunkt, an dem zwei Kräfte an verschiedenen Punkten angreifen. Damit der Hebel in Ruhe bleibt, müssen sich die Drehmomente durch die beiden Kräfte aufheben (der Einfachheit wegen sind die Kräfte senkrecht zum Hebel gerichtet) • F1 r1 + F2 r2 = 0 r1 F1 F2 r2 40