Systeme ohne Gedächtnis (ohne Speicher)
Werbung
")
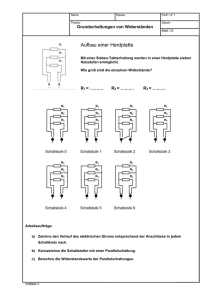
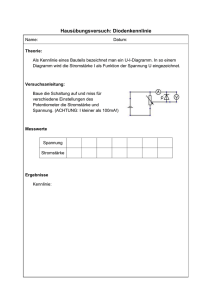
38 3.2 Systeme ohne Gedächtnis (ohne Speicher) Systeme ohne „Gedächtnis“, d.h. ohne Speicherelemente sind z.B. Netzwerke aus rein ohmschen Widerständen (Bild 3.1). Bild 3.1: System ohne Speicher mit konstanten ohmschen Widerständen R1, R2 Die (Bau-)Elemente R1 und R2 können keine elektrische Energie speichern, so daß der Wert des Ausgangssignals y(t)=ua(t) im Zeitpunkt t nur vom Wert des Eingangssignals u(t)=ue(t) in demselben Zeitpunkt abhängt: y (t ) = f [u (t )]. (3.2) Konkret ist hier gemäß Spannungsteilregel u a (t ) = R2 u (t ) R1 + R2 e (3.3) die das System für jeden Zeitpunkt t beschreibende Gleichung. Bei konstanten Widerständen hängt der „Übertragungsfaktor“ K= R2 R1 + R2 nicht vor der Zeit ab; er ist konstant. Das mathematische Modell für die Signalübertragung hat also die ganz einfache Form der linearen algebraischen Gleichung y (t ) = K ⋅ u(t ) (3.4) mit konstantem Koeffizienten K. Mit der Annahme der konstanten Widerstände stellt also das System aus Bild 3.1 ein lineares zeitinvariantes System dar. (Man überzeuge sich durch Anwendung des Superpositions- und Verschiebungsprinzips!) Der analytischen Form des Modells (3.4) entspricht die graphische Darstellung als Kennlinie (Bild 3.2): 39 Bild 3.2: Kennlinie des „statischen“ Systems aus Bild 3.1 mit konstanten Widerständen Die Kennlinie ist eine Gerade und hat für alle t den konstanten Anstieg tan α = K. Würden sich die Widerstände (z.B. durch Erwärmung) im Laufe der Zeit ändern, so wird K=K(t), und es liegt ein lineares zeitvariantes System vor. Graphisch erhält man entsprechend Bild 3.2 eine Geradenschar: Für unterschiedliche Zeitpunkte ti gelten verschiedene Geraden mit unterschiedlichen Anstiegen. Besitzt im Netzwerk Bild 3.1 (mindestens) einer der Widerstände eine nichtlineare Strom-Spannungs-Charakteristik, stellt also einen nichtlinearen Widerstand dar, so hat das zur Folge, daß sich über den von der Größe des Eingangs abhängigen Stromfluß durch das Netzwerk ein von u abhängiger Übertragungsfaktor K=K(u) ergibt; anstelle von (3.4) gilt dann y (t ) = K[u (t )] ⋅ u (t ) = f [u (t )]. (3.5) Auch hier hängt der Wert des Ausgangssignals im Zeitpunkt t nur vom Wert des Eingangssignals in demselben Zeitpunkt ab. Es liegt also ein System ohne Gedächtnis (Speicher) vor, das aber nichtlinear ist, da der Faktor K [u (t )] in (3.5) selbst von der Größe des Eingangssignals u abhängt und damit y eine nichtlineare Abhängigkeit von u hat. Die statische Kennlinie zur graphischen Darstellung dieser Abhängigkeit ist daher keine Gerade mehr, sondern eine gekrümmte Kurve y = f (u ).