V11-Drehspulgalvanom.. - physics (Johannes Dörr)
Werbung
")
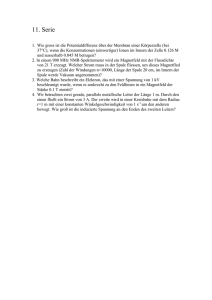
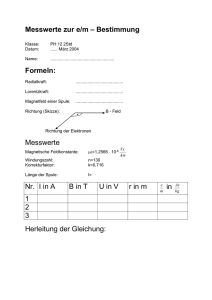
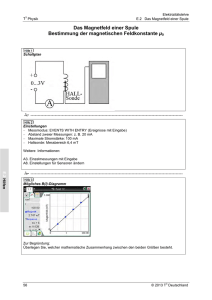
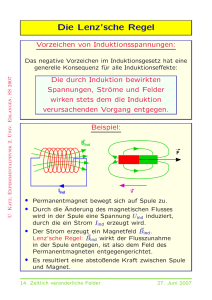
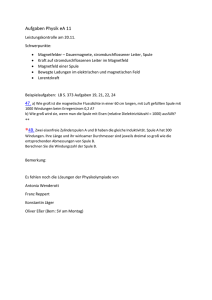
Physikalisches Praktikum Versuch 11 Drehspul-Galvanometer Praktikanten: Johannes Dörr [email protected] physik.johannesdoerr.de Katharina Rabe [email protected] Gruppe: 14 Datum: 14.02.2007 Assistent: Tobias Liese Oliver Schönborn [email protected] 1 Einleitung Das Drehspul-Galvanometer ist in unserem Versuchsblock (Versuch 11-20) ein sehr wichtiges Hilfsmittel, um Ladungen und den Strom zu messen, die durch das Galvanometer in unserem jeweiligen Versuchsaufbau fließen. In diesem Versuch wollen wir uns nun verdeutlichen, wie das Galvanometer funktioniert und wie man damit die verschiedenen Messgrößen bestimmen kann. 2 2.1 Theorie Was für Momente wirken auf unser Spiegeldrehspul-Galvanometer? Damit wir einen Überblick über diesen Versuch erhalten, sollten wir uns zunächst mit dem Aufbau des Galvanometers beschäftigen. Es besteht aus einem Permanentmagneten, in dessen Mitte ein Luftspalt ist. Dort 1 befindet sich ein feststehender, zylinderförmiger Eisenkern, auf dem eine Spule angebracht ist, welche sich um die Symmetrieachse des Eisenkerns drehen und vom Strom I durchflossen werden kann. Die Spule wird von zwei Spiralfedern in ihrer Ruhelage gehalten. Desweiteren ist an der Spule ein sich mitdrehender Spigel durch ein Draht angebracht. Mit seiner Hilfe kann durch ein Laser die Position der Spule im System auf ein Schirm projeziert werden (siehe Abb. 1). Figure 1: Schematischer Aufbau des Drehspul-Galvanometers Lässt man nun einen Strom I durch dieses, sich in Ruhe befindendes System fließen, bewirkt das Magnetfeld in der Spule eine Auslenkung aus der Ruhelage. Diesem Drehmoment sind jedoch das Reibungsmoment, das Trägheitsmoment, das Richtmoment und rücktreibende Induktionsmomente entgegengerichtet. Im Folgenden betrachten wir diese einzelnen Momente genauer. 2.1.1 Das Drehmoment ~ erzeugt bei einem Stromfluß durch die Spule eine Lorentzkraft auf Der Permanentmagnet mit der Feldstärke B die Spule. ~ F~L = q ~v × B (1) Schauen wir uns nun an, für welchen Weg s in der Spule die Lorentzkraft wirkt, wenn die Spule in der Ruhelage senkrecht auf den Magnetfeldlinien steht, s = 2na da 2 Flächen der Spule senkrecht zu B stehen. Hierbei ist n die Windungszahl und a die Höhe der Spule. Somit können wir für die Lorenzktaft mit Hilfe der Zeit t schreiben: FL = qvB = ItvB = IsB = 2naIB . Diese Kraft liegt jeweils beim Abstand ergibt sich also für unser Drehmoment b 2 (2) von der Drehachse gemessen an, wobei b die Länge der Spule ist. Es MDreh = nabIB = GI . (3) Da mit Außnahme von I alle Werte des Drehmoments konstant sind, fassen wir sie hier zur Galvanometerkonstante G zusammen, die uns die nötigen Informationen des jeweils benutzen Galvanometers gibt. 2 2.1.2 Das Richtmoment Da unsere Spule von Spiralfedern in der Ruhelage gehalten werden soll, wirkt nun natürlich auf diese aus der Ruhelage gebrachten Federn ein rücktreibendes Moment. Dieses ist proportional zum ausgelenkten Winkel ϕ. Dabei ist der Proportionalitätsfaktor in diesem System die Winkelrichtgröße D oder auch Federkonstante genannt. Es gilt für das Richtmoment: MD = −Dϕ . (4) 2.1.3 Das Reibungsmoment Die Reibung ist, wie wir wissen, von der Geschwindigkeit abhängig. In diesem Fall betrachten wir nun die Geschwindigkeit des Winkels ϕ. Das Reibungsmoment hat somit eine Proportionalität zu ϕ̇, der Proportionalitätsfaktor nennt sich Reibungskoeffizient ρ. Wir erhalten ein Reibungsmoment von MR = −ρϕ̇ . 2.1.4 (5) Das Trägheitsmoment Das Drehmoment der Trägheit ist abhängig von ϕ̈ und mit dem Trägheitsmoment Θ verknüpft. MT = −Θϕ̈ . 2.1.5 (6) Das Induktionsmoment Da sich die vom magnetischen Feld durchsetzte Fläche der Spule mit der Auslenkung der Spule ändert, wird eine Spannung in der Spule induziert. Es gilt für den magnestischen Fluss: Φ = BdA = Bab sin ϕ = G G sin ϕ ≈ ϕ . |n {z n } (7) bei kl. ϕ Somit ergibt sich für den induzierten Strom: IInd = UInd nΦ̇ Gϕ̇ = = . Rges Ra + Ri Ri + Ra (8) In diesem Fall sind der Gesamtwiderstand Rges einmal der Innenwiderstand des Galvanometers Ri und der außen angelegte Widerstand Ra . Wie wir für das Drehmoment schon herausgefunden haben gilt M = GI. Mit diesem Zusammenhang erhalten wir ein rücktreibendes Induktionsmoment von MInd = − 2.2 G2 ϕ̇ . Ri + Ra (9) Die Bewegungsgleichung und ihre Lösungen Die Addition aller wirkenden Drehmomente muss sich zu null ergeben, damit wir ein im Gleichgewicht befindliches System erhalten. Es gilt also: G2 Θϕ̈ + ρ + · ϕ̇ + Dϕ = G I (10) Ra + Ri ρ G2 D GI ⇒ ϕ̈ + + ·ϕ̇ + ϕ = . (11) Θ Θ(Ra + Ri ) Θ Θ |{z} | {z } ω02 2β 3 Wir erhalten hier eine inhomogene DGL, die sich durch eine Substitution mit φ = ϕ + GΘI zu einer homogen Differentialgleichung modulieren lässt, bei der sich das System um die Ruhelage φ = 0 bzw. ϕ = GΘI bewegt. In unserem Sytem ist nun β der Reibungskoeffizient, der abbhängig vom Außenwiderstand RA ist. Für große Ra haben wir also eine kleine Dämpfung, ist umgekehrt Ra klein, dann gibt es eine starke Dämpfung. ω0 ist die Eigenschwingung des Systems. φ̈ + 2β φ̇ + ω02 φ = 0 (12) Diese homogene Gleichung können wir nun mit dem allgemeinen Ansatz φ = C eλt lösen. φ(t) = C eλt λt (13) φ̇(t) = Cλ e φ̈(t) = Cλ2 eλt = λ2 φ(t) . = λφ(t) (14) (15) Setzen wir dies nun in unsere Bewegungsgleichung ein, erhalten wir: q λ2 + 2βλ + ω02 = 0 ⇒ λ1/2 = −β ± β 2 − ω02 . (16) Die Lösung der Bewegungsgleichung ergibt sich somit zu Folgendem: h √ 2 2 √ 2 2i φ(t) = e−βt c1 e β −ω0 + c2 e− β −ω0 . (17) Da wir ja aber nicht φ sondern ϕ haben wollen, müssen wir noch zurück substituieren (ϕ = φ + h √ 2 2i G I √ 2 2 ϕ(t) = e−βt c1 e β −ω0 + c2 e− β −ω0 + . Θ G I Θ ): (18) An dieser Gleichung kann man sehr schön sehen, dass für große Zeiten die vorderen Terme nicht mehr von Bedeutung sind, sonderen nur noch der letzte Term ins Gewicht fällt. Da dieser Term proportional zum Strom I ist und der Rest nur Konstanten sind, kann man das Galvanometer auch als Strommessgerät nutzen. 2.2.1 Der Schwingfall (β 2 < ω02 ) Wenn der Fall eintritt, dass β 2 < ω02 gilt, p dann wird unsere Wurzel imaginär im Exponent. Wir können unsere Lösung dann mit der Kreisfrequenz (ω = ω02 − β 2 ) zu ϕ(t) GI = e−βt c1 e−iωt + c2 eiωt + Θ ϕ(t) = e−βt [(c1 + c2 ) cos(ωt) + i(c2 − c1 ) sin(ωt)] + (19) GI Θ (20) umformen. Aus den Anfangsbedingungen ϕ(t = 0) = 0 und ϕ̇(t = 0) = 0 können wir unsere Konstanten c1 und c2 bestimmen: 0 = 1 · (c1 + c2 ) + 0 = −β(c1 + c2 ) + ωi (c2 − c1 ) = GI Θ GIβ + iω(c2 − c1 ) Θ GI Θ GIβ ⇒ c2 − c1 = − . iΘω ⇒ c1 + c2 = − Somit erhalten wir die endgültige Lösung der Bewegungsgleichung für den Schwingfall: GI −βt β GI ϕ(t) = − e cos(ωt) + sin(ωt) + . Θ ω Θ (21) (22) (23) Um das logarithmische Dekrement Λ zu bestimmen, nehmen wir zwei aufeinanderfolgende Schwingungen und vergleichen derem Amplituden. Das Dekrement ist definiert als: ϕ(t) Λ = ln ⇒ Λ = ln(eβT ) = βT . (24) ϕ(t + T ) 4 2.2.2 Der Krichfall (β 2 > ω02 ) In diesem Fall ist unsere Wurzel im Exponenten reell. Wir definieren die Kreisfrequenz ω = erhalten für die Lösung der Bewegungsgleichung: ϕ(t) GI = e−βt c1 e−ωt + c2 eωt + Θ ϕ(t) = e−βt (c1 + c2 ) cosh(ωt) + (c2 − c1 ) sinh(ωt) + p β 2 − ω02 und (25) GI . Θ (26) Mit denselben Anfangsbedingungen wie im Schwingfall erhält man für die Lösung der Bewegungsgleichung im Krichfall: GI −βt GI β ϕ(t) = − e . (27) cosh(ωt) + sinh(ωt) + Θ ω Θ Für große Dämpfungen β und kleine t kann man als Lösung noch eine schönere finden. h √ 2 2i √ 2 2 φ(t) = e−βt c1 e β −ω0 + c2 e− β −ω0 h i φ(t) = c1 e−(ω+β)t + c2 e−(ω−β)t lim φ(t) β→∞ = c e−(ω+β)t |1 {z } lim β→∞ +c2 e−(−ω+β)t (28) (29) (30) geht schneller gegen null . (31) Es ergibt sich somit ein Ausdruck für φ bei großen Dämpfungen mit dem Anfangswert (φ(t = 0) = φ0 ): φ(t) = φ0 e−(β−ω)t . 2.2.3 (32) Der Aperiodische Grenzfall (β 2 = ω02 ) Beim Aperiodischen Grenzfall soll nun ω zu null werden. Hierfür nehmen wir den Ansatz des Krichfalls, sodass sich unsere Lösung zu Folgendem ergibt: lim ϕ(t) ω→0 = − GI −βt ( lim cosh(ωt)) + ( lim β sinh(ωt)) e ω→0 ω→0 ω Θ | {z } | {z } (33) GI −βt GI e (1 + βt) + . Θ Θ (34) =1 ⇒ ϕ(t) = − =βt Der Aperiodische Grenzfall ist wichtig für die Messtechnik, da hier keine Schwingung eintritt wie im Schwingfall, aber auch nicht zur Ruhelage gekrochen wird. Somit ist dieser Fall genau die Mitte zwischen den anderen Fällen. Bei ihm geht der Ausschlag sehr schnell zurück auf die Ruhelage. Da die Ruhelage oft von Interresse ist, kann man so viel Zeit sparen. Um einen solchen Grenzfall zu erzeugen, muss unser Aussenwiderstand Ra richtig eingestellt sein. Da wir wissen, dass β = ω0 sein muss, können wir den Außenwiderstand bestimmen, bei dem es zum Grenzfall kommt: β = ⇒ G2 ρ + 2Θ 2Θ(Ra + Ri ) = ⇔ Ri + Ra = ⇔ Ra = 5 ω0 r D Θ G2 √ 2 DΘ − ρ G2 √ − Ri . 2 DΘ − ρ (35) (36) (37) (38) 2.3 Das ballistische Galvanometer Beim balistischen Galvanometer wird nur sehr sehr kurz ein Stromstoß durch die Spule gelassen, sodass man Terme mit ϕ und ϕ̇ in der Bewegungsgleichung vernachlässigt werden kann. ϕ̈ = G I Θ ⇒ ϕ̇ = G Q . Θ (39) Hierbei ist Q die Ladung, die beim Stoß durch die Spule geflossen ist. Die Ruhelage unseres Aufbaus bleibt im Nullpunkt, da kein Strom mehr fließt. Wir können jetzt die Lösung der Bewegungsgleichung für den Schwingfall benutzen mit den Anfangsbedingungen ϕ(0) = 0 und ϕ̇ = G Θ Q. So ergibt sich für unsere zu bestimmenden Konstanten: c1 + c2 = 0 und c2 − c1 = G Q . iωΘ (40) Wir erhalten für unser ϕ(t): G Q sin ωt . (41) ωΘ Da es am einfachsten ist, den Maximalwert der Schwingung abzulesen, bestimmen wir zunächst einmal den π Wert, an dem die Schwingung das erste Mal maximal wird. Dieses geschieht bei sin( π2 ), somit haben wir t = ω2 in unsere Formel einzusetzen. Um nun die Ladung zu bestimmen, lösen wir die Gleichung nach Q auf. ϕ(t) = e−βt ϕ(t1.M ax ) = e− 2.4 β π 2ω β π ωΘ G Q ⇒ Q = ϕ(t1.M ax. )e 2ω . ωΘ G (42) Die verschiedenen Empfindlichkeiten des Galvanometers Als Empfindlichkeit eines Galvanometers beschreibt man im Normalfall den Ausschlag des Galvanometers in Abhängigkeit von der zu messenden Größe. Wir werden uns im Folgenden mit der Strom-, der Stoß und der Spannungsempfindlichkeit beschäftigen. 2.4.1 Die Stromempfindlichkeit Wie man an der Bewegungsgleichung sehr schön sehen kann, gilt für die Ruhelage bei einem permanenten Strom I im Galvanometer: D GI ϕ G ϕ= ⇒ = CI = . (43) Θ Θ I D Die Stromempfindlichkeit CI ist groß für große G bzw. kleine D. 2.4.2 Die Spannungsempfindlichkeit Bei der Spannungsempfindlichkeit ist dieser Wert auf dieselbe Weise zu bestimmen: CU = ϕ ϕ Ci = = . U Rges I Ri + Ra (44) Somit gilt für die Spannungsempfindlichkeit dasselbe wie für die Stromempfindlichkeit, nur dass der Widerstand noch Einfluss nehmen kann. Denn indem man den Widerstand vergrößert, wird CU kleiner. 2.4.3 Die Stoßempfindlichkeit Die Stoß- oder auch Ballistische Empfindlichkeit kann man mit Hilfe der Ladungsbestimmung vom ballistischen Galvanometer erhalten. βπ ϕ G CB = = e− 2ω . (45) Q ωΘ 6 3 Durchführung 1. Es ist die im Praktikumsskript gezeigte Schaltung aufzubauen und die Ausschläge α(Ra ) nach links und nach rechts für Ra zwischen 0 und 200Ω zu bestimmen (in 20Ω Schritten): 2. Bei gleichbleibender Schaltung erzeuge man durch Kurzschließen von Ra einen genügend großen Ausschlag. Wenn dieser erreicht wird, sind Schalter S1 und S2 zu öffnen und • für große Widerstande, dem Schwingfall sind die Umkehrpunkte und die Schwingungszeit zu bestimmen (Ra : (3; 2; 1; 0,5)kΩ). • für kleine Widerstande, dem Kriechfall ist der zeitliche Verlauf des Zurückkriechens zu messen (Ra : 0 − 50kΩ). • durch Testen von verschiedenen Ra ist der aperiodische Grenzfall zu bestimmen. • bei ungedämpfter Schwingung ist die Schwingungsdauer T0 zu bestimmen. Das ballistische Galvanometer: Es ist die zweite Schaltung wie in im Praktikumsskript beschrieben aufzubauen. Dann wird durch den Primärstromkreis ein kurzer Strom in dem Sekundärkreis induziert. Es ist die Stromstärke im Primärkreis und α(Ra ) zu messen (10 Messwerte mit Ra = 1 − 10kΩ). 4. 3. Es sind die benötigten Daten von der Spule und der Abstand vom Schirm zum Galvanometer, wie alle weitern benötigten Daten zu notieren. 4 4.1 Auswertung Stromempfindlichkeit und innerer Widerstand (1.) Abbildung 4.1 zeigt 1/ϕ als Funtktion des Außenwiderstands Ra . Aus der linearen Regression erhalten wir auf Grund von: U Ri + Ra 1 1 1 = Ra + Ri ϕ Ci U Ci U | {z } | {z } ϕ = Ci · I = Ci · ⇒ m (46) (47) b aus der Steigung die Stoßempfindlichkeit Ci Ci = 1 mU (48) und aus dem Y-Achsenabschnitt den Innenwiderstand Ri Ri = b . m (49) Die Spannung U beträgt 2 · 10−5 V , was sich aus der Spannungsteilung der Widerstände R1 und R2 ergibt. Die Werte betragen: Ci = 98231(965) A−1 Ri = 322(12) Ω 7 Figure 2: 1/ϕ als Funktion des Außenwiderstands RA 8 Figure 3: Logarithmus der maximalen Amplitude in Abhängigkeit von der Zeit 9 4.2 Untersuchung des Schwingfalls (2.) Eine gedämpfte Schwingung lässt sich beschreiben mit: β ϕ = ϕ0 e−βt · cos(ωt) + sin(ωt) ω ⇒ (50) ϕmax = ϕ0 e−βt . (51) Die maximale Amplitude ϕmax nimmt also exponentiell ab. Wir tragen ϕmax halblogarithmisch gegen die Zeit t auf (Abbildung 4.2) und können aus der Regression β bestimmen: ln ϕ = −β t + ln ϕ0 |{z} (52) β = −m . (53) m ⇒ Das Dekrement Λ errechnet sich aus Λ = β · T , wobei T die Schwingungsdauer angibt. Wir erhalten die folgenden Werte: Ra β Λ 500Ω 0,64(2)s−1 3,22(34) 1000Ω 0,292(6)s−1 1,56(19) 2000Ω 0,13(2)s−1 0,69(12) 3000Ω 0,17(2)s−1 0,73(86) In Abbildung 4.2 ist β in Abhängigkeit von 1 Ri +Ra aufgetragen. Mit der Relation β = G2 1 G2 ρ 1 · + βLuf t = + , · 2Θ (Ri + Ra ) 2Θ (R + R ) 2Θ i a |{z} |{z} m (54) b wobei Θ das Trägheitsmoment, G die Galvanometerkonstante und ρ der Luftreibungskoeffizient ist, erhalten wir 1 durch die Auftragung von β in Abhängigkeit von Ri +R die Galvanometerkonstante und den Luftreibungskoefa fizient, wie im Folgenden beschrieben. Es gilt: Θ= Mit G Θ = Ci ω02 und ω0 = 2π T0 G2 . 2m (55) (T0 = 4,13s) erhalten wir: 2m Ci ω0 s 2 2 2σm 2mσCi σG = + Ci ω02 Ci2 ω02 G= 10 (56) (57) Figure 4: β in Abhängigkeit von 11 1 Ri +Ra und G2 2m s 2 2 2 G σm GσG . + σΘ = m 2 m2 Θ= Aus b = ρ 2Θ (59) ergibt sich: ρ = 2b Θ p σρ = (2Θσb )2 + (2bσΘ )2 . Für die jeweiligen Werte erhalten wir: Θ = 2,72(13,8) · 10−8 kgm2 G = 4,1(3) V s ρ = 8,7(50,3) Js 4.3 (58) Untersuchung des Kriechfalls (3.) Figure 5: Logarithmus der Auslenkung in Abhängigkeit von der Zeit 12 (60) (61) Für t > 1s gilt ϕ = ϕ0 e−(β−ω)t . Daraus folgt: ln ϕ = (−β + ω) t + ln ϕ0 . | {z } (62) m Abbildung 4.3 zeigt den Logarithmus der Auslenkung in Abhängigkeit von der Zeit. Damit lässt sich die Konstante β bestimmen. Es gilt: q (63) ω = ω02 − β 2 . Mit m = −β + ω (64) erhalten wir dann m+β = q ω02 − β 2 ⇔ β = ω0 − m2 2m m2 − ω02 · σm . 2m Für die Messungen mit verschiedenen Widerständen erhalten wir die folgendne Werte: σβ = Ra β 0Ω 15,89(76)s−1 10Ω 8,97(1)s−1 20Ω 6,35(2)s−1 40Ω 4,98(1)s−1 50Ω 3,16(7)s−1 (65) (66) Zur Bestimmung des Innenwiderstands tragen wir den Kehrwert von β gegen den Außenwiderstand Ra auf (Abbildung 4.4). Es gilt die Näherung 1 1 ≈ β β − βLuf t (67) 2Θ 1 2Θ = 2 Ra + 2 Ri . β G |{z} |G {z } (68) und somit: m b Somit ergibt sich: Ri = b m s σRi = (69) σ 2 b m und wir erhalten die Werte: 13 + bσm m2 2 , (70) Figure 6: Kehrwert von β in Abhängigkeit vom Außenwiderstand Ra 14 Ri = 155(45) Ω Beim systematisches Suchen des aperiodischen Grenzfalls ermittelten wir einen Außenwiderstand von 210Ω. 4.4 Ballistische Empfindlichkeit (4. und 5.) Figure 7: ϕ/Q in Abhängigkeit vom Außenwiderstand Ra Für die ballistische Empfindlichkeit Cb gilt: Cb = ω0 · Ci = 149(2) · 103 1 . As Für die Ladung, die durch das Galvanometer geflossen ist, gilt: Z Z 1 Q = Idt = · U dt . Ra + Ri + RSpule U ist die induzierte Spannung, sie ergibt sich aus: Z n1 n2 r2 µ0 I U dt = −n2 A B = , l 15 (71) (72) (73) dabei ist A die Querschnittsfläche, r = 0,254m der Radius und n2 = 600 die Windungszahl der Sekundärspule, B ist die magnetische Flussdichte, n1 = 2800 die Windungszahl und l = 1m die Länge der Primärspule, und I = 0,102A beschriebt den Strom, der durch letztere fließt. Durch Einsetzen von (73) in (72) erhalten wir: Q= n1 n2 r2 µ0 I . l(Ra + Ri + RSpule ) (74) Als Innenwiderstand Ri und RSpule verwenden wir den direkt gemessenen Wert von Ri = 26Ω bzw. RSpule = 39Ω. Für den maximalen Ausschlag des Galvanometers ϕmax gilt: ϕmax = GQ ϕmax = Cb Q ⇔ = Cb . Θ ω0 Q (75) In Abbildung 4.4 ist ϕmax /Q gegen den Widerstand RA aufgetragen. Aus der geschätzten Linie für RA → ∞ ergibt sich: Cb = 403500(15000) C −1 Mit unseren Ergebnissen können wir die Beziehung Cb = ω0 Ci nicht bestätigen. Zwischen den beiden Werten für Cb erhalten wir eine Abweichung von 63%. 5 Diskussion Bei der Durchführung des Versuchs gab es an sich keine größeren Probleme, höchtens dass es recht schwer war, die Maxima für den Schwingfall schnell genung abzulesen und mitzuschreiben. Bei der Auswertung sieht das mal wieder etwas anders aus. Die von uns berechneten Innenwiderstände Ri weichen in unserer Auswertung um 50% voneinander ab und im Vergleich mit dem von uns mit dem Multimeter gemessenen Widerstand ist die Abweichung noch größer. Leider haben wir keine Ahnung, welcher Wert nun der richtige ist, da leider keine Vergleichswerte angegeben sind. Für die Stoßempfindlichkeit gilt Ähnliches. Auch hier weichen unsere Werte um ca. 50% ab. Dies kann daran liegen, dass wir nicht wussten, welchen Innenwiderstand wir in die Berechnung einfließen lassen sollten. Im Allgemeinen ist zur Auswertung zu sagen, dass sie mal wieder sehr aufwendig war, ohne dabei viel an neuem Wissen mitzunehmen. Die Theorie war sehr interesannt im Gegensatz zur Auswertung, man hat endlich mal verstanden, wie das Ding aufgebaut ist und warum wir nun die Ladung und den Strom auf diese Weise messen können, wie wir es in voherigen Versuch ja schon einige Male getan haben. 16