Aufgabenstellung mit Lösung - Institut für Automatisierungs
Werbung

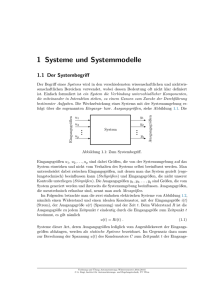
1. Übung: Systemanalyse Aufgabe 1.1 (Magnetlagerung). Diese Aufgabe soll die Bedeutung von Ruhelagen am Beispiel der eindimensionalen magnetischen Lagerung aus Abbildung 1.1 zeigen. Ein Elektromagnet wird dabei mit einer Spannung v versorgt, welche einen Strom i und damit eine Magnetkraft fm zur Folge hat. Auf das zu lagernde Objekt mit der Masse m wirken die Magnetkraft, die Gewichtskraft und eine äußere Lastkraft fl . Der Luftspalt zwischen Elektromagnet und dem Objekt ist mit δ bezeichnet und die Geschwindigkeit des Objekts mit w. Ferner ist in Abbildung 1.1 das magnetische Ersatzschaltbild für den magnetischen Fluss Φ dargestellt. Es besteht aus einer Durchflutungsquelle Θ = N i, wobei N die Anzahl der Windungen bezeichnet, einer konstanten Eisenreluktanz RE = p1 und einer luftspaltabhängigen Reluktanz RL (δ) = p2 δ mit den Konstanten p1 und p2 . Für das d elektrische Teilsystem gilt dt ψ = −Ri + v, wobei ψ = LG (δ)i den verketteten Fluss und R den elektrischen Widerstand der Spule des Elektromagneten bezeichnen. Φ i v fm RE δ, w Θ g RL (δ) fl Abbildung 1.1.: Prinzipskizze der eindimensionalen Magnetlagerung und magnetisches Ersatzschaltbild. Für die Induktivität gilt LG (δ) = N2 , RG (δ) (1.1) wobei RG (δ) die Ersatzreluktanz des Magnetkreises gemäß Abbildung 1.1(b) bezeichnet. Für die Magnetkraft gilt 1 ∂LG (δ) 2 i . (1.2) 2 ∂δ Das Gesamtmodell der magnetischen Lagerung lautet mit dem Strom i als Ausgangsgröße fm = Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien 1. Übung: Systemanalyse Seite 2 R(p1 + p2 δ) ψ+v ψ̇ N2 δ̇ = ẋ = f (x, u) = w 1 p f 2 l 2+g+ ẇ − ψ 2 N 2m m ψ p1 + p2 δ y = h(x, u) = = ψ. LG (δ) N2 − (1.3) (1.4) a) Bestimmen Sie die Ruhelage(n) des Systems für konstante Eingangsgrößen uR = h vR fl,R iT . Im Weiteren wird angenommen, δR = δ sei eine gewünschte Ruhelage des Systems für fl,R = 0. Bestimmen Sie vR so, dass δR = δ eine Ruhelage des Systems darstellt. b) Linearisieren Sie das nichtlineare Zustandsmodell um eine allgemeine Ruhelage (xR , uR ) und geben Sie es in der Zustandsraumdarstellung ∆ẋ = A∆x + B∆u (1.5a) ∆y = cT ∆x + D∆u (1.5b) an. Lösung von Aufgabe 1.1. Die Ruhelagen des Systems berechnen sich zu s ψR = ± 2N 2 (mg + fl,R ) p2 1 vR N 2 − p1 δR = p2 RψR ! wR = 0. Damit für fl,R = 0 die Position δR = δ eine Ruhelage des Systems darstellt, muss die Spannung zu s p2 δ + p1 2 vR = ± R mg N p2 gewählt werden. Die Systemmatrizen des linearisierten Modells lauten 2 − R2 (p1 + p2 δR ) − Rp ψ 0 N2 R N A= 0 0 1 p2 − N 2 m ψR 0 0 cT = p1 +p2 δR N2 p2 ψ N2 R 0 1 B= 0 0 D = 0. Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien 0 0 1 m 1. Übung: Systemanalyse Seite 3 Aufgabe 1.2 (Ruhelagen und Linearisierung). Im Folgendem soll die Berechnung der Ruhelagen und die Linearisierung für verschiedene Systemklassen behandelt werden. a) Das mathematische Modell einer Kugel (Radius R > 0, Masse m > 0), die in einer Flüssigkeit mit dem spezifischen Gewicht ρ schwimmt (siehe Abbildung 1.2) ist durch w f (x, u) = F ρgπh2 g− − (3R − h) m 3m h(x, u) = h h iT gegeben. Dabei bezeichnet x = h w den Zustand, u = F den Eingang und y = h den Ausgang sowie g die Gravitationskonstante. F h m, R g Abbildung 1.2.: Schwimmende Kugel. Bestimmen Sie jenen Wert der Kraft FR , bei dem die Eintauchtiefe der Kugel in der Ruhe hR = R3 beträgt und bringen Sie das mathematische Modell durch Linearisierung um diese Ruhelage in die Form (1.5). b) Gegeben ist das elektrische System nach Abbildung 1.3. Die darin verwendete Induktivität ist eine Funktion des Stroms L = L(iL ) und die Kapazität ist von der Spannung uC abhängig, d. h. C = C(uC ). Der Operationsverstärker wird ideal angenommen und ein unbelasteter Ausgang uC vorausgesetzt, d. h. es fließt kein Strom aus den Klemmen. Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien 1. Übung: Systemanalyse Seite 4 R1 R3 + iL - L(iL ) u1 R2 uC C(uC ) R2 us Abbildung 1.3.: Elektrisches Netzwerk. h Das mathematische Modell ergibt sich mit dem Zustand x = uC iL iT zu (2u1 − uC − us − 2R1 iL ) C )) C(uC ) + uC d(C(u R3 duC ẋ = f (x, u) = u − R i 1 1 L L )) L(iL ) + iL d(L(i diL y = h(x, u) = uC . Im Folgenden gilt L(iL ) = L0 + L1 i2L uC C(uC ) = C0 + C1 1 − e uC0 − mit den konstanten, positiven Parametern L0 , L1 , C0 , C1 und uC0 . Berechnen Sie alle Ruhelagen des Systems für us = 0 und u1 = konst. Lösung von Aufgabe 1.2. a) Die benötigte Kraft FR , um die Kugel bei hR = R/3 in der Ruhe zu halten, beträgt 8 FR = mg − ρgπR3 . 81 Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien 1. Übung: Systemanalyse Seite 5 Die Systemmatrizen des linearisierten Modells ergeben sich zu 0 A = 2ρgπh ρgπh2 − 3m R (3R − hR ) + 3m R h i 1 0 0 b= 1 −m " # h i cT = 1 0 d= 0 . b) Für die Ruhelagen gilt uC,R = 0 u1 . iL,R = R1 Aufgabe 1.3 (Linearität und Zeitinvarianz). Überprüfen Sie die folgenden dynamischen Systeme auf Linearität bzw. Zeitinvarianz. a) 5ÿ − b) 1 ẏy = 7.5tu 10 1 (3) y y − 10ÿ − = 2 1+t c) cos Z t√ 0 1 2u(τ )dτ + u̇ 3 7 4 π ÿ + 3y = u 5 10 Lösung von Aufgabe 1.3. Zur Überprüfung der Linearität bzw. Zeitinvarianz werden die gegebenen Systeme in einem ersten Schritt als explizite Differentialgleichungssysteme erster Ordnung dargestellt. Lassen sich diese anschließend in der Form d x = A(t)x + B(t)u dt y = C(t)x + D(t)u (1.6a) (1.6b) anschreiben, kann sofort auf die Linearität des Systems geschlossen werden. Sind die Systemmatrizen konstant, folgt unmittelbar die Zeitinvarianz. Ist das System nichtlinear, d. h. ist keine Darstellung in der Form (1.6) möglich, sind zur Charakterisierung der Zeit(in)varianz weitere Untersuchungen nötig. Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien 1. Übung: Systemanalyse Seite 6 a) Das System lautet als Differentialgleichungssystem erster Ordnung d x1 = dt x2 " # " # x2 = f (x, u, t) 1 50 x1 x2 + 1.5tu y = x1 , welches nicht in der Form (1.6) dargestellt werden kann. Die Zeit tritt in f (x, u, t) aber explizit auf, womit sofort auf die Zeitvarianz des Systems geschlossen werden kann. b) Mit den fünf neu eingefügten Zuständen und dem neuen Eingang Z t x1 = y, x4 = x2 = ẏ, x5 = u, x3 = ÿ, v = u̇, 0 u(τ )dτ, kann man das gegebene System umschreiben in ẋ1 = x2 ẋ2 = x3 ẋ3 = 2 10x3 + √ 1 x1 + 2x4 + v t+1 3 ẋ4 = x5 ẋ5 = v , womit leicht ersichtlich ist, dass eine Darstellung gemäß (1.6) mit dem Zustand x und dem Eingang v möglich ist. Das System ist linear aber zeitvariant. c) Das System lautet als Differenzialgleichungssystem erster Ordnung 0 x2 d x1 = = −3 7 −3 x + 10 cos( 4 π) u dt x2 cos( 4 π) 1 cos( 4 π) " # 5 5 5 1 0 x + u 7 0 4 10 cos( π) 5 y = x1 , womit unmittelbar die Linearität und Zeitinvarianz gefolgert werden kann. Übung Übung Automatisierungs- und Regelungstechnik (Wintersemester 2016/2017) ©ACIN - CDS,Institut für Automatisierungs- und Regelungstechnik, TU Wien