Ferienkurs Experimentalphysik 2
Werbung

Ferienkurs Experimentalphysik 2
Sommersemester 2015
Gabriele Semino, Alexander Wolf, Thomas Maier
Vorlesung 3
Zeitlich veränderliche Felder und elektromagnetische
Schwingungen
Nach dem Skript "Konzepte der Experimentalphysik 2: Elektromagnetismus"
von Abel Perera, Andrea Meraner, Gabriele Semino und Adonia Siegmann
Inhaltsverzeichnis
4 Zeitabhängige elektrische Felder
1
4.1
Rückblick: Zeitunabhängige Felder . . . . . . . . . . . . . . . . . . . . . . .
1
4.2
Faraday’sches Induktionsgesetz . . . . . . . . . . . . . . . . . . . . . . . .
1
4.2.1
Integralform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
4.2.2
Differentielle Form . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
4.2.3
Lenz’sche Regel . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
4.2.4
Selbstinduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
4.2.5
Energie des Magnetfeldes . . . . . . . . . . . . . . . . . . . . . . . .
4
4.3
Der Maxwell’sche Verschiebungsstrom . . . . . . . . . . . . . . . . . . . . .
5
4.4
Maxwell-Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
5 Wechselstromkreise
8
5.1
Wechselstromkreis mit Induktivität . . . . . . . . . . . . . . . . . . . . . .
8
5.2
Wechselstromkreis mit Kapazität . . . . . . . . . . . . . . . . . . . . . . .
8
5.3
Induktive und kapazitive Widerstände . . . . . . . . . . . . . . . . . . . .
9
5.4
Impedanz und Admittanz . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
5.5
Lineare Netzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5.6
Wechselstromleistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
6 Elektromagnetische Schwingkreise
15
6.1
Der elektromagnetische Schwingkreis . . . . . . . . . . . . . . . . . . . . . 15
6.2
Offene Schwingkreise: der Hertz’sche Dipol . . . . . . . . . . . . . . . . . . 17
Abbildungsquellen
20
I
4
4.1
Zeitabhängige elektrische Felder
Rückblick: Zeitunabhängige Felder
~ = ρ
div E
ε0
~ =0
rot E
~ = − grad φ
E
~ =0
div B
~ = µ0~j
rot B
~ = rot A
~
B
(4.1.1)
~
~j = σ E
Diese bisher kennengelernten Gleichungen beschreiben zusammen mit der Lorentzkraft
alle Phänomene der Elektrodynamik, die auf ruhenden Ladungen und stationären Ströme
beruhen (Elektro- und Magnetostatik). Alle behandelten elektrischen und magnetischen
Felder gelten hier als zeitlich konstant.
4.2
4.2.1
Faraday’sches Induktionsgesetz
Integralform
Nun betrachten wir einen magnetischen Kraftfluss (siehe dazu Gleichung 3.1.1), welcher
zeitlich veränderlich ist. Nach dem Faraday’schen Induktionsgesetz wird durch die Veränderung des Kraftflusses eine Induktionsspannung Uind induziert, die man wie folgt berechnen kann.
Uind
d
d
= − Φmag = −
dt
dt
¨
~ · dA
~
B
(4.2.1)
A
Aus dieser Gleichung wird deutlich, dass eine Induktionsspannung erst dann entsteht,
~ · dA,
~ nur die Fläche senkrecht zum
wenn das Magnetfeld oder die dazu effektive Fläche (B
Feld wird eingebracht) sich zeitlich verändert. Beispiele:
• Eine Stabmagnet wird relativ zu einer Spule bewegt ⇒ veränderliches Magnetfeld
• In einem homogenen Magnetfeld wird eine Spule zusammengedrückt ⇒ Fläche der
Spule ändert sich
• In einem homogenen Magnetfeld wird ein quadratische Spule um eine Symmetrieachse
senkrecht zum Magnetfeld gedreht ⇒ Änderung der effektiven Spulenfläche
Hinweis: Bei einer mehrmals gewickelten Spule mit N Windungen zählt jede Windung
zu ihrer Gesamtfläche Ages = N A.
1
4.2.2
Differentielle Form
Die differentielle Form des Faraday’schen Induktionsgesetzes lautet:
~ =−dB
~
rot E
dt
(4.2.2)
Demnach erzeugt ein zeitlich veränderliches magnetisches Feld ein elektrisches
Wirbelfeld.
Eine einfache Herleitung erhält man folgendermaßen:
Aus dem Auftreten einer Spannung, hier Uind , können wir schließen, dass es ein elektrisches
Feld geben muss (vgl. Gleichung 1.1.20):
˛
~ · d~s
Uind =
E
(4.2.3)
∂A
Das geschlossene Integral bezieht sich beispielsweise auf eine Leiterschleife mit der Oberfläche A (mit dem Rand ∂A), welche vom Magnetfeld B durchsetzt wird. Nun wenden
wir den Satz von Stokes an:
˛
¨
~ · d~s =
~ · dA
~
Uind =
E
rot E
(4.2.4)
∂A
A
Dies setzen wir mit der Integralform des Faraday’schen Induktionsgesetzes gleich. Wenn
wir nun annehmen, dass nur das magnetische Feld variiert wird (was durchaus berechtigt
ist, da jede Änderung der Fläche auch als Änderung des Magnetfeldes innerhalb dieser
aufgefasst werden kann), lässt sich die Zeitableitung in das Integral ziehen:
!
¨
¨
¨
d
d
~ · dA
~=
~ · dA
~=
~ · dA
~
B
− B
rot E
(4.2.5)
−
dt A
dt
A
A
Lassen wir nun das Flächenintegral weg, kommen wir auf die oben genannte Gleichung
4.2.2.
4.2.3
Lenz’sche Regel
Nach dem Faradayschen Induktionsgesetz verursacht eine magnetische Flussänderung eine
induzierte Spannung. Diese Spannung verursacht in einem Leiter einen Stromfluss, welcher
wiederum ein (induziertes) Magnetfeld erzeugt, welches der (ursprünglichen) Änderung
des magnetischen Flusses entgegenwirkt (Lenz’sche Regel). Die durch Induktion entstehenden Ströme, Felder und Kräfte versuchen also stets den die Induktion verursachenden
Vorgang zu verhindern.
• Ist die Ableitung des magnetischen Flusses negativ (verkleinert sich z.B das Magnetfeld
B0 bzw. die Fläche), so richtet sich das induzierte Magnetfeld Bind in Richtung des
ursprünglichen Magnetfeldes B0 und verstärkt somit dieses.
• Ist hingegen die Ableitung des magnetischen Flusses positiv (wird z.B B0 größer), so
richtet sich das induzierte Magnetfeld Bind in entgegengesetzter Richtung zu B0 und
vermindert dieses somit.
2
Mathematisch wird die Lenz’sche Regel durch das Minus im Faradayschen Induktionsgesetz 4.2.1 ausgedrückt. Gegebenenfalls ist diese Entgegenwirkung mit mechanischen
Kraftwirkungen verbunden. Man betrachte dazu das folgende Beispiel (oder auch das sog.
Waltenhofen’sche Pendel).
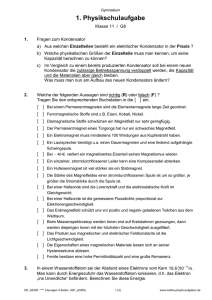
Abbildung 4.1: Bewegung eines Stabmagnets durch einen leitenden Ring(18)
Man bewege einen Stabmagneten auf einen frei aufgehängten, leitenden Ring zu. Das sich
(durch die Bewegung) ändernde (vergrößernde) Magnetfeld im Ring induziert in diesem
einen Strom, dessen Magnetfeld wiederum nach Lenz dem des Stabmagneten entgegengerichtet ist. Die beiden Magnetfelder stoßen sich ab und der Ring bewegt sich vom
Stabmagneten weg. Bewegt man nun den Stabmagneten vom Ring weg, dreht sich die Situation um: der Ring „folgt“ dem Stabmagneten. Man kann somit durch eine periodische
Bewegung den Ring zum Schwingen bringen.
4.2.4
Selbstinduktion
Stromdurchflossene Leiterschleifen erzeugen ein magnetisches Feld (wie z.B. beim BiotSavart-Gesetz diskutiert, siehe Abschnitt 3.2.2). Wird dieser Strom zeitlich variiert, verändert sich auch das magnetische Feld und es muss laut Faraday’sche Gesetz wieder eine
Induktion vorliegen. Somit erzeugt die Änderung des Felds der Schleife in der Schleife selbst eine Induktionsspannung, welche nach der Lenz’schen Regel der Änderung der
Stromstärke entgegenwirkt. Die Eigenschaft, eine Induktionsspannung durch die Änderung des selbst erzeugten Magnetfeldes zu erzeugen, wird als (Selbst-)Induktivität L bezeichnet. Sie ist die Proportionalitätskonstante zwischen dem magnetischen Fluss und der
elektrischen Stromstärke in der Spule
Φmag = L · I
(4.2.6)
bzw. die Konstante, welche die Induktionsspannung und die zeitliche Änderung der Stromstärke verbindet.
Uind = −L ·
dI
dt
Die Einheit der Induktivität ist [L] = 1 VAs = 1 H = 1 Henry.
3
(4.2.7)
Beispiel: Selbstinduktivität einer zylindrischen Spule
Eine Spule mit n Windungen pro Meter, welche von der Stromstärke I durchflossen wird,
hat im Inneren ein zur Stromstärke proportionales Magnetfeld von B = µ0 nI. D.h. der
magnetische Fluss durch eine Windung der Fläche A ist gegeben durch:
¨
~ · dA
~ = B · A = µ0 nAI
Φmag =
B
(4.2.8)
A
Die Induktionsspannung ist sowohl durch 4.2.1 als auch 4.2.7 gegeben:
Uind
d
= N · − Φmag
dt
!
= −µ0 n2 lA
dI
d
= −L · I
dt
dt
(4.2.9)
wobei N die Gesamtwindungszahl n · l ist. Die Selbstinduktivität ergibt sich zu:
L = µ0 n2 A · l = µ0 n2 V
(4.2.10)
wobei V das Volumen der Spule ist.
4.2.5
Energie des Magnetfeldes
Analog zur in Kondesatoren gespeicherten Energie kann die in Induktivitäten gespeicherte
Energie wie folgt berechnet werden.
1
Wmag = LI 2
2
1
1 2
wmag = µ0 H 2 =
B
2
2µ0
1
Wel = CU 2
2
1
wel = ε0 E 2
2
D.h. die Energiedichte des gesamten elektromagnetischen Feldes beträgt (c2 =
(5.3.14)
1
):
ε0 µ0
!
wem
1
1
1 =
ε 0 E 2 + B 2 = ε 0 E 2 + c2 B 2
2
µ0
2
(4.2.12)
Verallgemeinern wir diese Formeln auf Felder in Materie mit der Verschiebungsdichte
D = ε0 εr E und der magnetischen Erregung H = µ01µr B:
wem =
1
(ED + BH)
2
4
(4.2.13)
4.3
Der Maxwell’sche Verschiebungsstrom
Das Ampere’sche Gesetz, wie wir es bisher definiert haben, ist unvollständig. Dies soll am
folgenden Beispiel klar werden.
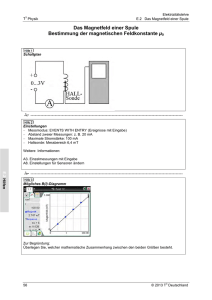
Abbildung 4.2: Zur Herleitung des Verschiebungsstromes(1)
Die beiden Flächen S1 und S2 haben den gleichen Rand ∂S. Wir nutzen das Ampere’sche
Gesetz zur Bestimmung des Magnetfeldes auf dem Rand mithilfe der unterschiedlichen
Flächen.
˛
¨
~
~ = µ0 I
~j · dA
B · d~r = µ0
˛∂S
¨S1
~ · d~r = µ0
~=0
~j · dA
B
∂S
S2
Die Ergebnisse der zwei Berechnungen führen zu zwei unterschiedlichen Ergebnissen, was
nicht möglich sein dürfte. Die Unvollständigkeit des Ampere’sche Gesetz wird auch aus
folgenden Messergebnissen deutlich. Betrachten wir nämlich folgenden Stromkreis,
Abbildung 4.3: Im Kondensator wird ein Magnetfeld gemessen(9)
so ergäbe sich nach dem Ampere’schen Gesetz, dass, wenn wir um die gestrichelte Linie im
Kondensator integrieren, das Magnetfeld innerhalb des Kondensators gleich 0 ist. Messungen zeigen aber das Gegenteil bei zeitlich veränderlichen elektrischen Feldern (z.B bei der
Ladung/Entladung des Kondensators). Maxwell schloss daraus auf eine Art Stromstärke,
einen Verschiebungsstrom zwischen den Kondensatorplatten IV (bzw. eine Verschiebungsstromdiche jV ).
Dieser lässt sich folgendermaßen herleiten: variiert man die Stromstärke im System, so
5
wird auch die Zahl der Ladungen Q = A · σ = A · (ε0 E) auf den Platten verändert.
Vektoriell folgt:
dQ
d ~ ~
~· ∂E
~
IV =
= ε0 (A
· E) = ε0 A
(4.3.1)
dt
dt
∂t
Mit der Stromdichte:
Verschiebungsstromdichte
~
~jV = ε0 ∂ E
∂t
(4.3.2)
Um diese Stromdichte wird das Ampere’sche Gesetz erweitert:
¨
˛
~
~
B d~s = µ0
(~j + ~jV ) dA
∂F
(4.3.3)
A
Differentiell ergibt sich mit dem Stokes’schen Satz:
~ = µ0 (~j + j~V ) = µ0
rotB
~
~j + ε0 ∂ E
∂t
!
(4.3.4)
bzw.:
Erweitertes Ampere’sches Durchflutungsgesetz
~ = µ0~j + 1 ∂ E
~
rotB
c2 ∂t
(4.3.5)
D.h. Magnetfelder können ebenfalls von zeitlich veränderlichen elektrischen Feldern erzeugt werden.
In Materie gilt analog:
~
~ = ~j + ∂ D
(4.3.6)
rotH
∂t
4.4
Maxwell-Gleichungen
Nun fassen wir noch einmal alle Maxwell-Gleichungen zusammen. Diese beschreiben zusammen mit der Lorentz-Kraft die Gesamtheit aller elektromagnetischen Phänomene:
Im Vakuum
In Materie
ρel
ε0
=0
∂ ~
=− B
∂t
1 ∂ ~
= µ0~j + 2 E
c ∂t
div E =
~ = ρel
div D
~
div B
~ =0
div B
~
rot E
~
rot B
~ =−∂B
~
rot E
∂t
~ = ~j + ∂ D
~
rot H
∂t
6
Bemerkungen:
• Die Maxwell-Gleichungen sind lorentzinvariant.
• Aus den korrigierten Maxwell-Gleichungen wird klar, dass die bisherige Definition des
elektrischen Feldes in Abhängigkeit des elektrischen Potentials nicht konsistent ist.
~ = − rot grad φel = 0 6= − ∂ B
~
rot E
∂t
(4.4.1)
Man muss also folgende Korrektur einbringen.
~
~ = − grad φel − ∂ A
E
∂t
(4.4.2)
Dabei muss die Coulomb-Eichung (siehe Gleichung 3.1.8) durch die Lorentz’sche Eichung ersetzt werden.
~ = − 1 ∂φel
(4.4.3)
div A
c2 ∂t
7
5
Wechselstromkreise
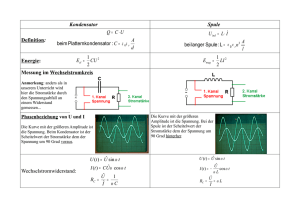
Spulen und Kondensatoren haben in Wechselstromkreisen eine ähnliche Wirkung wie Widerstände. Diese zusätzliche Eigenschaft wird Impedanz oder Wechselstromwiderstand
(komplexer Widerstand) genannt. In einer Spule hinkt der Strom der Spannung nach;
dies ist durch die Lenz’sche Regel ersichtlich, da die Induktionsspannung den in die Spule
geleiteten Strom abbremst. In Kondensatoren eilt der Strom der Spannung voraus, denn
die Spannung muss im Kondensator kontinuierlich aufgebaut werden.
Von nun an wird als äußere Spannung
Ue = U0 cos(ωt)
(5.0.1)
verwendet.
5.1
Wechselstromkreis mit Induktivität
Abbildung 5.1: Wechselstromkreis mit Spule, der Strom hinkt der Spannung hinterher(4)
Nach der Maschenregel gilt hier:
Ue + Uind = 0
Für die induzierte Spannung Uind = −L dI
erhalten wir:
dt
U0 cos(ωt) = L
also:
U0
I(t) =
L
5.2
ˆ
t
cos(ωt0 ) dt0 =
0
dI
dt
U0
U0
sin(ωt) =
cos(ωt − 90◦ )
ωL
ωL
(5.1.1)
Wechselstromkreis mit Kapazität
Abbildung 5.2: Wechselstromkreis mit Kondensator, der Strom eilt der Spannung voraus(4)
8
Die Maschenregel führt diesmal zu :
Ue − UQ = 0
⇒
Q(t)
= Ue (t)
C
Wir multiplizieren mit C und bilden die Ableitung:
I(t) = C
5.3
d
Ue (t) = ωCU0 cos(ωt + 90◦ )
dt
(5.2.1)
Induktive und kapazitive Widerstände
Für die Stromstärken erhalten wir insgesamt:
für L: IL (t) = IL,0 sin(ωt)
für C: IC (t) = −IC,0 sin(ωt)
Beide Stromstärken sind in verschiedene Richtungen zur Spannung um 90◦ phasenverschoben. Um den bereits erwähnten Widerstandswert zu erhalten, definiert man sozusagen „phasenabhängige Widerstände“. Ihren Betrag erhält man, wann man die Amplitude
von Ue (= U0 ) und der Stromstärken IL bzw. IC über U = RI in Beziehung setzt. Man
behandelt sie also so, als wären sie Gleichstromwiderstände. Wir erhalten:
U0
U0
= U0 /
= ωL
I0,L
ωL
U0
1
für C: |RC | =
= U0 /(ωCU0 ) =
I0,C
ωC
für L: |RL | =
(5.3.1)
(5.3.2)
Dieser Betrag berücksichtigt aber noch nicht die Phasenverschiebung.
5.4
Impedanz und Admittanz
Ein Vektor V~ = Vx~ex + Vy~ey , welcher vom Betrag V0 konstant ist, vom Ursprung ausgeht
und sich mit der Winkelgeschwindigkeit ω um den Ursprung dreht, besitzt in der x-yEbene die Komponenten:
Vx = V0 cos(ωt)
Vy = V0 sin(ωt)
Anstatt Vektoren zu verwenden, können wir komplexe Zahlen benutzen: der Realteil übernimmt die Rolle der x-Komponente und der Imaginärteil die der y-Komponente. Es folgt
als Analogon:
V = Vx + iVy = V0 cos(ωt) + iV0 sin(ωt) = V0 eiωt
Dieses Konstrukt lässt sich exakt gleichwertig auf die induktiven und kapazitiven Widerstände übertragen:
Z = R + iX
Z = |Z|eiφ
(5.4.1)
Man bezeichne nun als Z die Impedanz (oder komplexer Widerstand). R ist der Ohm’sche
Widerstand, während X den Blindwiderstand darstellt.
9
Abbildung 5.3: Zur Erläuterung der komplexen Schreibweise von Impedanzen(1)
Stellen wir nun die Wechselspannung ebenfalls komplex dar:
U (t) = U0 eiωt
(5.4.2)
Nun lässt sich das Ohm’sche Gesetz erweitern:
Ohm’sches Gesetz für komplexe Widerstände
U = ZI
mit
Z=
R
= iωL
1
ZC = iωC
=
ZL
−i
ωC
Widerstand
Spule
Kondensator
(5.4.3)
Diese komplexe Darstellung kann komplizierte Wechselstromschaltungen stark vereinfachen. Die Kirchhoff’schen Gesetze gelten weiterhin.
Wenn wir nun diese komplexen Widerstände in das erweiterte Ohm’sche Gesetz einsetzen,
erhalten wir neben der „Widerstandswirkung“ auch die erwartete Phasenverschiebung:
I=
Mit
U0 eiωt
U0
U0 1 iωt
U
=
e =
(−i)eiωt
=
Z
ZL
ωL i
ωL
π
π
π
−i = 0 + i(−1) = cos −
+ i sin −
= ei(− 2 )
2
2
erhalten wir zuletzt:
U0 i(− π ) iωt
U0 i(ωt− π )
2
I=
e 2 e =
e
ωL
ωL
Man definiere dazu noch den komplexen Leitwert (Admittanz) als
Y = 1/Z
(5.4.4)
(5.4.5)
(5.4.6)
Dieser ist besonders hilfreich bei der Behandlung von Parallelschaltungen.
Es folgen einige Beispiele zur Erläuterung der komplexen Darstellung der Impedanzen
und Admittanzen.
10
Abbildung 5.4: Einfache Schaltelemente(1)
Abbildung 5.5: Einige Kombinationen von Schaltelementen(1)
5.5
Lineare Netzwerke
Im allgemeinen Fall ist die Stromstärke nicht mehr proportional zur Spannung. Man kann
in solchen komplizierteren Systems aber dennoch durch Superposition Spannungen und
Stromstärken berechnen:
U (t) =
X
Uk (ωk ) =
k
I(t) =
X
X
U0,k ei(ωk t−φk )
(5.5.1)
I0,k ei(ωk t−ψk )
(5.5.2)
k
Ik (ωk ) =
k
X
k
11
Hochpass-Filter
Abbildung 5.6: Der Hochpassfilter: nur Wechselströme mit hoher Frequenz werden
durchgelassen(21)
Der Hochpass ist so konstruiert, dass, wenn eine Wechselspannung mit tiefer Kreisfrequenz
ω als Eingangsspannung Ue angelegt wird, der Wechselstromwiderstand des Kondensators
C entsprechend sehr hoch steigt und der Großteil dieser Spannung an C abfällt. Hohe
Spannungen im Gegenzug fallen größtenteils am Widerstand R ab, welcher durch ein
entsprechendes Gerät ersetzt werden kann.
Man erhält als Ergebnis der Ausgangsspannung Ua :
Ua =
R
1 Ue
R + iωC
(5.5.3)
Der Betrag der Übertragungsfunktion lautet:
|H(ω)| =
Ua Ue
=√
ωRC
1 + ω 2 R2 C 2
(5.5.4)
Die Phasenverschiebung zwischen Ein- und Ausgangsspannung beträgt:
tan(φ) =
Im(Z)
1
=
Re(Z)
ωRC
(5.5.5)
Abbildung 5.7: Die physikalischen Größen im Hochpassfilter. Oben das Spannungsverhältnis, unten der Phasenunterschied(4)
12
Tiefpass-Filter
Abbildung 5.8: Der Tiefpassfilter: nur Wechselströme mit niedriger Frequenz werden
durchgelassen(22)
Der Tiefpass ist das genaue Gegenstück vom Hochpass, d.h. nach dem selben Prinzip
werden nun hochfrequente Wechselströme blockiert, indem die Positionen von Widerstand
und Kondensator vertauscht werden. Bei großen ω ist R im Vergleich zu ωC sehr groß, sodass die Ausgangsspannung zum Großteil am Widerstand abfällt. Die Ausgangsspannung
beträgt dieses Mal:
Ua =
1
iωC
R+
1
iωC
Ue
(5.5.6)
Der Betrag der Übertragungsfunktion lautet:
|H(ω)| =
Ua Ue
=√
1
1 + ω 2 R2 C 2
(5.5.7)
Die Phasenverschiebung ist:
tan(φ) = −ωRC
(5.5.8)
Abbildung 5.9: Die physikalischen Größen im Tiefpassfilter: links das Spannungsverhältnis, rechts der Phasenunterschied(1)
5.6
Wechselstromleistung
Die Leistung kann man in Wechselstromschaltungen in allgemeinerer Form über die effektive Spannung/Stromstärke darstellen.
Allgemein gilt:
P (t) = U (t)I(t) = U0 sin(ωt)I0 sin(ωt + φ)
(5.6.1)
Der zeitliche Mittelwert ist, wie bereits beschrieben, durch Integration über die Periodendauer zu erhalten:
U0 I0
P̄el =
cos(φ)
(5.6.2)
2
13
Für reine L- oder C-Schaltungen ist cos(φ) = 0, d.h. es wird an Spule und Kondensator
keine Leistung verbraucht.
Wir definieren nun drei neue Größen:
• Die Wirkleistung
PW = Ieff Ueff cos(φ) = P̄el
(5.6.3)
PS = Ieff Ueff
(5.6.4)
PB = Ieff Ueff sin(φ)
(5.6.5)
• Die Scheinleistung
• und die Blindleistung
Wirk-, Schein- und Blindwiderstand werden mit Z =
definiert.
14
Pi
Ieff
und diesen Leistungsgrößen
6
6.1
Elektromagnetische Schwingkreise
Der elektromagnetische Schwingkreis
Eine Schaltung, in der sich eine Induktivität L und ein Kondensator C befinden, nennt
man elektromagnetischer Schwingkreis. In einem solchen Aufbau entstehen elektromagnetische Schwingungen, die man analog zu den bekannten mechanischen Schwingungen
beschreiben kann. Im folgendem Bild lässt sich diese Analogie verdeutlichen.
Abbildung 6.1:
Schwingungen(4)
Analogon
zwischen
mechanischen
und
elektromagnetischen
Bei einer mechanischen Schwingung geht periodisch die kinetische Energie in potentielle
Energie über und umgekehrt, während in einem Schwingkreis die Energie zwischen elektrische im Kondensator und magnetische in der Induktivität wechselt. Zur Beschreibung
dieses Phänomens betrachten wir folgende Schaltung.
Abbildung 6.2: RLC-Schwingkreis(1)
Mithilfe der Maschenregel lässt sich für diese Schaltung folgende Gleichung schreiben.
L
Q
dI
+ RI + = 0
dt
C
(6.1.1)
Ableiten dieser Gleichung nach der Zeit führt zu einer Differentialgleichung für den Strom.
L
dI
1
d2 I
+R + I =0
2
dt
dt C
15
(6.1.2)
Zur Lösung benutzen wir folgenden Ansatz.
I(t) = Aeλt
wobei A und λ im Allgemeinen komplexe Zahlen sind. Einsetzen in die Differentialgleichung liefert folgende mögliche Werte für λ
λ1,2
R
=−
±
2L}
| {z
−α
s
R2
1
−
2
4L
LC
|
{z
}
β
Abhängig von den verschiedenen Werten, die in der Gleichung vorkommen, lassen sich
zwei Fälle unterscheiden.
(a) Kriechfall (& aperiodischer Grenzfall)
R2
1
>
2
4L
LC
Mit den allgemeinen Anfangsbedingungen
⇒
β∈R
(6.1.3)
˙
und I(0)
= I˙0
I(0) = I0
erhält man folgende Werte für A.
I0
α
I˙0
=
1±
±
2
β
2β
!
A1,2
˙
Setzt man I(0)
= 0, so erhält man die spezielle Lösung
#
"
I(t) = I0 e−αt
α
cosh(βt) + sinh(βt)
β
(6.1.4)
Ist dagegen β = 0, so folgt der sogenannte aperiodischer Grenzfall:
h
i
I(t) = e−αt I0 + I˙0 + αI0 t
(6.1.5)
In beiden Fällen geht I(t) → 0 für t → ∞. Dies geschieht aber im aperiodischen Fall am
schnellsten.
(b) Gedämpfte Schwingung
1
R2
<
⇒
2
4L
LC
Die allgemeine Lösung in diesem Fall lautet:
h
β ≡ iω ∈ I
I(t) = e−αt A1 eiωt + A2 e−iωt
i
(6.1.6)
(6.1.7)
Damit I(t) eine reelle Größe ist, müssen A1 = a + ib und A2 = a − ib komplex konjugiert
sein. Die Lösung wird dann zu
I(t) = 2|A|e−αt cos(ωt + ϕ)
(6.1.8)
q
√
1
R2
wobei ω = LC
− 4L
a2 + b2 und tan ϕ = b/a ist, mit a und b Konstanten, die
2 , |A| =
man aus den Anfangsbedingungen bestimmen kann. In diesem Fall schwingt der Strom mit
einer Cosinus-Form und wird dabei von einem exponentiell abfallenden Term gedämpft.
16
6.2
Offene Schwingkreise: der Hertz’sche Dipol
Die bisher betrachteten Schwingkreise sind geschlossene Schaltungen. Im folgenden Bild
lässt sich aber verdeutlichen, wie solche geschlossenen Schwingkreise auch in offene Kreise
überführt werden können (von links nach rechts).
Abbildung 6.3: Kontinuierlicher Übergang vom geschlossenen zum offenen Schwingkreis(4)
Der entscheidende Unterschied zwischen diesen zwei Arten von Schwingkreisen ist die
räumliche Ausdehnung der erzeugten Felder. Während in einem geschlossenen Schaltkreis
die Felder räumlich begrenzt sind (elektrische Felder im Kondensator und magnetische
Felder in der Induktivität), breiten sich die Felder im offenen Fall weit im Raum aus
(siehe folgende Abbildung).
Abbildung 6.4: Ausdehnung der Felder in den verschiedenen Versionen des
Schwingkreises(4)
Die Ausbreitung dieser Felder geschieht mit Lichtgeschwindigkeit in Form von elektromagnetischen Wellen (siehe dazu Kapitel 7). Eine schematische Darstellung der Funktionsweise einer Stabantenne ist in der folgenden Abbildung zu finden.
Abbildung 6.5: Schematische Darstellung einer Stabantenne(4)
17
In der Antenne fließt ein Strom mit den Randbedingungen I(0) = I(l) = 0, wobei l die
Länge des Stabes ist. Im Stab bildet sich also eine stehende Welle mit der Wellenlänge
λ = 2l. Die niedrigste Resonanzfrequenz ω0 im Stab ist gegeben durch
ω0 =
π
2πvP h
= vP h
λ
l
(6.2.1)
wobei
1
c
(6.2.2)
vP h = √ = √
εµ
εε0 µµ0
die Geschwindigkeit ist, mit der sich elektromagnetische Felder im Stab ausbreiten. Zur
Beschreibung der Felder, die durch eine solche stehende Welle innerhalb des Leiters entstehen, betrachten wir folgende Abbildung.
Abbildung 6.6: Darstellung der elektromagnetischen Felder eines Dipols(12)
Durch die periodische Verschiebung der Ladungsträger innerhalb des Leiters erhält man
eine Abwechslung von elektrischen und magnetischen Felder. Die ersten kommen zustande,
wenn zwischen den zwei Enden des Stabes eine Spannung vorliegt, während die zweiten
wegen der Ströme im Stab entstehen. Die in der Abbildung gezeigten Fälle sind nur die
Grenzfälle, in denen man nur eine Art von Feldern hat, während im Allgemeinen eine
Überlagerung der zwei Felder vorliegt. Wie schon besprochen, breiten sich diese Felder
im Raum aus; in der folgenden Abbildung soll diese Ausbreitung schematisch dargestellt
werden.
Abbildung 6.7: Ausbreitung der Felder im Raum(13)
18
Die genaue Beschreibung der Felder eines solchen Dipols ist relativ kompliziert, weswegen
wir hier nur die wesentlichen Ergebnisse zusammenfassen werden. Das von einer solchen
Antenne abgestrahlte Magnetfeld hat die Form:
~ =
B
1
r
(p~˙ × ~r) + (p~¨ × ~r)
2
3
4πεc r | {z } |c {z }
1. Term
(6.2.3)
2. Term
wobei p~(t) = q d~ = qd0 sin ωt~ez . Dabei ist zu beachten, dass der erste Term mit 1/r2 , der 2.
Term aber nur mit 1/r abfällt, wodurch dieser bei einer Fernfeldentwicklung eine größere
Bedeutung hat. Für das elektrische Feld erhält man:
~ r, t) =
E(~
h
i
1
1
∗
∗
¨(t − r/c) × ~er × ~er
+
−
p
~
[3(~
p
·
~
e
)
·
~
e
−
p
~
]
r
r
4πε0 r3
4πε0 c2 r
|
{z
1. Term
}
|
{z
2. Term
(6.2.4)
}
mit p~ ∗ = p~(t − r/c) + rc p~˙(t − r/c). Da der zweite Term nur mit 1/r, während der erste mit
1/r3 abfällt, ist nur dieser bei einer Fernfeldnäherung von Bedeutung.
Es stellt sich jetzt die Frage nach der abgestrahlten Leistung eines solchen Dipols. Man
betrachte hierzu die Energiedichte ωem (siehe dazu Abschnitt 4.2.5).
1
ωem = ε0 (E 2 + c2 B 2 ) = ε0 E 2
2
(6.2.5)
Der letzte Schritt ist aus dem Vergleich der für eine Fernfeldnäherung relevanten Terme
~ = 1 |E|
~ ersichtlich
der verschiedenen Felder berechtigt, woraus der Zusammenhang |B|
c
wird. Man berechne darüber hinaus die Energiestromdichte I.
I = ε0 cE 2
(6.2.6)
Dies gibt an, wie viel Energie pro Zeiteinheit durch ein Flächenelement transportiert wird.
Einsetzten des oben berechneten elektrischen Feldes ergibt (man betrachte weiterhin nur
den für die Fernfeldnäherung relevanten Term):
I=
q 2 d20 ω 4 sin2 ϑ
sin(ω(t − r/c))
16πε0 c3 r2
(6.2.7)
Aus dieser Gleichung wird deutlich, dass keine Abstrahlung in Richtung des Dipols (ϑ = 0)
stattfindet, während sie senkrecht zu diesem (ϑ = π/2) maximal ist. Integriert man die
Energiestromdichte über eine Kugelfläche mit beliebigem Radius r (für die Definition von
~ siehe Abschnitt 7.5, hier wichtig: |S|
~ = I), so erhält man für die Leistung eines
S
Hertz’schen Dipols
‹
2 2 4
~ · dA
~ = q d0 ω sin2 (ω(t − r/c))
Pem =
S
(6.2.8)
6πε0 c3
Zeitlich gemittelt ergibt sich
hPem i =
q 2 d20 ω 4
12πε0 c3
19
(6.2.9)
Abbildungsquellen
(1) Hugel, Thorsten (2013): Vorlesungsskript Experimentalphysik 2, München
(4) Demtröder, Wolfgang (2009): Experimentalphysik 2, Springer-Verlag, Berlin Heidelberg
(9) elsenbruch.info/ph12_dipol.htm
(12) abiweb.de
(13) chemgapedia.de
(14) commons.wikimedia.org/wiki
(18) educentral.de
(21) de.wikipedia.org/wiki/Hochpass
(22) de.wikipedia.org/wiki/Tiefpass
20