Einführung in die Physik, Kinematik Leseprobe
Werbung

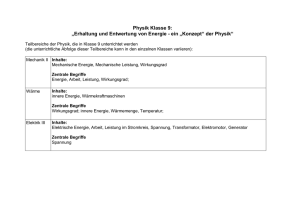
Leseprobe Schmidt Einführung in die Physik, Kinematik PHYSIK Studienbrief 2-050-0501 3. Auflage 2007 HDL HOCHSCHULVERBUND DISTANCE LEARNING Verfasser: Prof. Dr.-Ing., Dipl.-Phys. Joachim Schmidt Professor für Recycling im Fachbereich Fahrzeug-, Produktions- und Verfahrenstechnik im Institut für Recycling an der Fachhochschule Braunschweig / Wolfenbüttel Der Studienbrief wurde auf der Grundlage des Curriculums für das Studienfach „Physik“ verfasst. Die Bestätigung des Curriculums erfolgte durch den Fachausschuss „Grundständiges Fernstudium Wirtschaftsingenieurwesen“, dem Professoren der folgenden Fachhochschulen angehörten: HS Anhalt, FHTW Berlin, TFH Berlin, HTWK Leipzig, HS Magdeburg-Stendal, HS Merseburg, HS Mittweida, FH Schmalkalden, FH Stralsund, TFH Wildau und WH Zwickau. Redaktionsschluss: April 2007 3. Auflage 2007 2007 by Service-Agentur des Hochschulverbundes Distance Learning mit Sitz an der FH Brandenburg. Das Werk ist urheberrechtlich geschützt. Die dadurch begründeten Rechte, insbesondere das Recht der Vervielfältigung und Verbreitung sowie der Übersetzung und des Nachdrucks, bleiben, auch bei nur auszugsweiser Verwertung, vorbehalten. Kein Teil des Werkes darf in irgendeiner Form ohne schriftliche Genehmigung der Service-Agentur des HDL reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden. Service-Agentur des HDL (Hochschulverbund Distance Learning) Leiter: Dr. Reinhard Wulfert in der Agentur für wissenschaftliche Weiterbildung und Wissenstransfer e. V. Magdeburger Straße 50, 14770 Brandenburg Tel.: 03381 - 355 740 E-Mail: [email protected] Fax: 03381 - 355 749 Internet: http://www.aww-brandenburg.de Physik Einführung in die Physik, Kinematik Inhaltsverzeichnis Verzeichnis wichtiger physikalischer Größen und Einheiten ................................................... 4 Vorsätze zur Bildung von dezimalen Vielfachen und Teilen von Einheiten............................. 5 Physikalische Konstanten .......................................................................................................... 5 Griechisches Alphabet ............................................................................................................... 6 Randsymbole .............................................................................................................................. 6 Einleitung ................................................................................................................................... 7 Literaturempfehlung.................................................................................................................. 8 1 Einführung in die Physik ............................................................................................. 9 1.1 1.2 1.3 Begriff „Physik“ ............................................................................................................ 9 Arbeitsgebiete der Physik ............................................................................................ 10 Arbeitsmethoden der Physik ........................................................................................ 11 2 Physikalische Größen, Einheiten und Gleichungen .................................................. 13 2.1 2.2 2.3 Physikalische Größen und Einheiten ............................................................................ 13 Physikalische Gleichungen und Umrechnung von Einheiten......................................... 15 Skalare und vektorielle Größen in der Physik............................................................... 17 3 Auswertung physikalischer Messergebnisse ............................................................. 19 3.1 3.2 Messabweichungen, Mittelwert, Standardabweichung .................................................. 19 Darstellung von Messabweichungen in Graphen .......................................................... 24 4 Mathematische Hilfsmittel für die Physik................................................................ 25 4.1 4.2 4.3 4.4 4.5 Darstellung linearer Zusammenhänge........................................................................... 25 Rückführung komplizierterer Zusammenhänge auf lineare Funktionen......................... 27 Rechnen mit Vektoren ................................................................................................. 29 Differentialquotienten .................................................................................................. 33 Integrale ...................................................................................................................... 35 5 Kinematik................................................................................................................... 36 5.1 5.2 5.3 5.4 5.5 5.6 5.7 Überblick, Begriffe ...................................................................................................... 36 Gleichförmige, geradlinige Bewegung ......................................................................... 37 Ungleichförmige, geradlinige Bewegung...................................................................... 38 Gleichmäßig beschleunigte, geradlinige Bewegung...................................................... 40 Gleichförmige Kreisbewegung..................................................................................... 42 Beschleunigte Kreisbewegung ..................................................................................... 45 Mehrdimensionale Bewegung (Parameterdarstellung von Kurven) ............................... 45 Lösungshinweise zu den Übungsaufgaben............................................................................... 49 Literaturverzeichnis................................................................................................................. 53 Einführung in die Physik, Kinematik Physik Verzeichnis wichtiger physikalischer Größen und Einheiten Physikalische Größe Formelzeichen Physikalische Einheit Einheitenzeichen Länge, Weg ,, s, x Meter Fläche A m2 Volumen V m3 Zeit t Geschwindigkeit v m · s−1 Beschleunigung a m · s−2 Winkel ϕ Winkelgeschwindigkeit ω s−1 Winkelbeschleunigung α s−2 Frequenz f, ν Hertz Hz = s−1 Masse m Kilogramm kg Dichte ρ Kraft F Newton N = kg · m · s−2 Arbeit, W, Joule J = N · m = kg · m2 · s−2 Energie E Kilowattstunde Elektronenvolt kWh = 3,6 · 106 J eV = 1,60219 · 10−19 J Temperatur T Kelvin Grad Celsius K °C Leistung P Watt W = J · s−1 = kg · m2 · s−3 Impuls p Druck p Drehmoment M kg · m2 · s−2 Massenträgheitsmoment J kg · m2 Elektrische Stromstärke I Ampere A Elektrische Ladung Q Coulomb C=A·s Stoffmenge n Mol mol Lichtstärke Iv Candela cd 4 Sekunde Radiant Grad m s 1 ° kg · m−3 kg · m · s−1 = N · s Pascal Pa =kg · m−1 · s−2 = N · m−2 Physik Einführung in die Physik, Kinematik Vorsätze zur Bildung von dezimalen Vielfachen und Teilen von Einheiten Vorsatz Vorsatzzeichen Faktor, mit dem die Einheit multipliziert wird Exa Peta Tera Giga Mega Kilo Hekto Deka Dezi Zenti Milli Mikro Nano Piko Femto Atto E P T G M k h da d c m 1018 1015 1012 109 106 103 102 10 10−1 10−2 10−3 10−6 10−9 10−12 10−15 10−18 µ n p f a Physikalische Konstanten Gravitationskonstante γ = 6,672 · 10−11 N · m2 · kg−2 Normfallbeschleunigung g = 9,80665 m · s−2 Gaskonstante R = 8314,4 J · kmol−1 · K−1 Avogadro-Konstante NA = 6,02205 · 1026 kmol−1 Loschmidt-Konstante NL = 2,68675 · 1025 m−3 Boltzmann-Konstante k = 1,38066 · 10−23 J · K−1 Elektrische Feldkonstante ε0 = 8,85419 · 10−12 m−3 · s4 · kg−1 · A2 Magnetische Feldkonstante µ0 = 4π · 10−7 m · s−2 · kg · A−2 Elektrische Elementarladung e = 1,60219 · 10−19 C Spezifische Ladung des Elektrons e/me = 1,758805 · 1011 C · kg−1 Lichtgeschwindigkeit im Vakuum c = 2,997925 · 108 m · s−1 Faraday-Konstante F = 9,64846 · 107 C · kmol−1 Planck-Konstante h = 6,6262 · 10−34 J · s Ruhmasse des Elektrons me = 9,1095 · 10−31 kg Ruhmasse des Protons mp = 1,67265 · 10−27 kg 5 Einführung in die Physik, Kinematik Physik Ruhmasse des Neutrons mn = 1,67495 · 10−27 kg Atomare Masseneinheit mu = 1 u = 1,660566 · 10−27 kg Erdradius 6378 km Sonne − Erde 1,495 · 108 km Erdmasse 5,98 · 1024 kg Sonnenradius 6,96 · 105 km Sonnenmasse 1,99 · 1030 kg Erde − Mond 3,84 · 105 km Mondradius 1738 km Mondmasse 7,35 · 1022 kg Fallbeschleunigung am Pol 9,83 m · s−2 am Äquator 9,78 m · s −2 Griechisches Alphabet Α α Alpha Ν ν Ny Β β Beta Ξ ξ Xi Γ γ Gamma Ο ο Omikron ∆ δ Delta Π π Pi Ε ε Epsilon Ρ ρ Rho Ζ ζ Zeta Σ σ Sigma Η η Eta Τ τ Tau Θ θ Theta Υ υ Ypsilon Ι ι Jota Φ ϕ Phi Κ κ Kappa Χ χ Chi Λ λ Lambda Ψ ψ Psi Μ µ My Ω ω Omega Randsymbole B D K 6 Beispiel Definition Kontrollfragen M S Ü Merksatz Studienziele Übungsaufgabe Physik Einführung in die Physik, Kinematik b) Beginn und Ende der Zeitmessung für den 100-m-Lauf sind subjektiven Schwankungen (z. B. Reaktionszeit) unterworfen. c) Bei einem Voltmeter ist der Nullpunkt falsch eingestellt. Folglich sind die angezeigten Werte mit einer Abweichung behaftet. d) Der Widerstand einer Spule aus Kupferdraht wird durch Messung der Stromstärke und Spannung bestimmt. Aufgrund Ohmscher Erwärmung vergrößert sich der Widerstand. Dadurch tritt eine Abweichung auf. Ü 3.2 Die Geschwindigkeit eines Körpers, der sich gleichförmig geradlinig bewegt, werde zehnmal gemessen. v: (1,30 1,27 1,32 1,25 1,26 1,29 1,31 1,23 1,33 1,24) m/s. Berechnen Sie den Mittelwert der Geschwindigkeit v, die Standardabweichung s sowie die absolute und relative Abweichung. Ü 3.3 Gegeben seien die fehlerhaften Größen X1 = 103 ± 2 %, X2 = 25 ± 3 %, X3 = 84 ± 5 %. Berechnen Sie den relativen Fehler des zusammengesetzten Ergebnisses X = X12 ·X2 · X3−3! 4 Mathematische Hilfsmittel für die Physik Das vorliegende Kapitel fasst die wesentlichen mathematischen Grundlagen zusammen, die für ein Verständnis der hier behandelten physikalischen Zusammenhänge notwendig sind. Nach Durcharbeiten des Kapitels sollten Sie in der Lage sein: • mit Vektoren in Koordinatensystemen rechnen zu können und • einfache Differentiations- und Integrationsregeln zu beherrschen. 4.1 S Darstellung linearer Zusammenhänge Physikalische Zusammenhänge, bei denen eine Größe direkt proportional von einer anderen Größe abhängig ist, können durch lineare Funktionen dargestellt werden. Gegeben sei der folgende Zusammenhang zwischen der unabhängigen Variablen x und der abhängigen Variablen y: y=a·x+b (lineare Funktion). a wird als Steigungsfaktor der Kurve und b als Achsenabschnitt bezeichnet. 25 Einführung in die Physik, Kinematik Physik y y2 α y1 ∆y ∆x b x1 Bild 4.1 x x2 Lineare Funktion mit einem positiven Achsenabschnitt b Für den Steigungsfaktor a gilt: a= B B 4.1 ∆y y 2 − y 1 = = tan α . ∆x x 2 − x 1 Gegeben sei ein elektrischer Stromkreis mit einem Verbraucher, der einen Ohmschen Widerstand R hat. Bei einer Messung der elektrischen Stromstärke I (angegeben in Ampere A) bei veränderlicher Spannung U (angegeben in Volt V) sollte sich ein linearer Zusammenhang ergeben (Ohmsches Gesetz U = I · R). I [A] –1 Steigungsfaktor R U [V] Bild 4.2 B 4.2 Schematische Darstellung des Ergebnisses einer Strom-Spannungsmessung in einem Stromkreis mit Ohmschem Verbraucher. Es gilt das Ohmsche Gesetz. Kennlinie einer Schraubenfeder: Wird eine Schraubenfeder mit verschiedenen Massen belastet, so nimmt ihre Länge x proportional mit der durch die Masse wirkenden Gewichtskraft F zu (Hookesches Gesetz F = c · x). Die Proportionalitätskonstante wird als Federkonstante c bezeichnet. 26 Physik Einführung in die Physik, Kinematik x [m] Weg x Steigungsfaktor c Gewichtskraft F Bild 4.3 4.2 –1 F [N] Schematische Darstellung einer Kraft-Weg-Messung an einer Schraubenfeder. Es gilt das Hookesche Gesetz Beachte: Weil die unabhängige Größe F auf der Abszisse dargestellt ist, ergibt sich der Steigungsfaktor zu c−1: x = c−1 · F Rückführung komplizierterer Zusammenhänge auf lineare Funktionen Kompliziertere Zusammenhänge zwischen zwei physikalischen Größen können häufig durch eine geeignete Darstellung auf lineare Funktionen zurückgeführt werden. Parabelfunktion Es wird ein Zusammenhang der folgenden Form vermutet: y = m · x2. Ein derartiger Zusammenhang tritt beispielsweise bei einer gleichmäßig beschleunigten Bewegung auf (vgl. Kapitel 5). In dem Fall gilt: s= 1 · a ·t2. 2 Dabei ist s der zurückgelegte Weg, a die Beschleunigung und t die Zeit. Durch Auftragung von s gegen t 2 erhält man bei Gültigkeit der vermuteten Gesetzmäßigkeit eine Gerade. s s t Bild 4.4 t2 Parabelförmiger Zusammenhang zweier physikalischer Größen und „Linearisierung“ der Kurve durch geeignete Auftragung 27 Einführung in die Physik, Kinematik Physik Eine vergleichbare „Linearisierung“ lässt sich für einige Funktionentypen durch halblogarithmische bzw. doppellogarithmische Auftragung durchführen: Allgemeine Potenzfunktion Zusammenhänge der Form y = a · xn erscheinen auf doppellogarithmischem Papier als Geraden. Man kann jedoch auch beide Größen logarithmieren und sie auf einfachem Millimeterpapier darstellen: log y = log a + n · log x Der Exponent n ergibt sich aus dem Steigungsfaktor der Geraden und der Achsenabschnitt ist log a. log y2 Steigungsfaktor n = log y1 log a log x 2 − log x1 log x log x1 Bild 4.5 log y 2 − log y1 log x2 Linearisierung einer allgemeinen Potenzfunktion durch doppellogarithmische Auftragung der Messwerte Allgemeine Exponentialfunktion Funktionen der Form y = a · cx erscheinen auf halblogarithmischem Papier als Gerade. Man kann auch beide Seiten logarithmieren und sie auf einfachem Millimeterpapier darstellen. log y = log a + x · log c. Der Steigungsfaktor der Geraden ist log c und der Achsenabschnitt ist log a. 28 Physik Einführung in die Physik, Kinematik log y log y2 Steigungsfaktor: log c = log y1 log y 2 − log y1 x 2 − x1 log a x1 x2 x Bild 4.6 Linearisierung einer allgemeinen Exponentialfunktion durch halblogarithmische Auftragung der Messwerte 4.3 Rechnen mit Vektoren Wie bereits in Kapitel 2 dargestellt wurde, werden physikalische Größen, die eine Angabe der Richtung erfordern, durch Vektoren dargestellt. Im Folgenden sind einige Grundregeln für das Rechnen mit Vektoren zusammengestellt: 1. Vektoren werden geometrisch addiert: c a+b=c b a 2. Für Vektoren gilt das Kommutativgesetz: a a+b b b a+b a+b=b+a a 3. Für Vektoren gilt das Assoziativgesetz: a + (b + c) = (a + b) + c 4. Jeder Vektor hat einen Gegenvektor: a a + (−a) = 0 (Nullvektor) –a 29 Einführung in die Physik, Kinematik Physik 5.Für einen Differenzvektor c gilt: c –b b a − b = c = a + (−b) a 6. In der Komponentendarstellung eines Vektors (vgl. Bild 2.2) werden bei Addition und Subtraktion die einzelnen Komponenten eines Vektors algebraisch addiert bzw. subtrahiert: z. B. y by c ay b cx a x + b x = cy a y + by a ax B a x bx c = a + b = + a y by x bx B 4.3 Gegeben seien die Ortsvektoren a = (2, 5, 1) und b = (3, −7, 4) im dreidimensionalen Koordinatensystem. Der Summenvektor a + b hat die Komponentendarstellung 2 3 5 a + b = 5 + − 7 = − 2 , 1 4 5 für den Differenzvektor gilt: 2 3 − 1 a − b = 5 − − 7 = 12 . 1 4 − 3 7. Ein Vektor λ · a (λ reelle Zahl, d. h. Skalar) hat die λ-fache Länge des Vektors a und dieselbe Richtung wie a: a 30 1 a 2 2a Physik Einführung in die Physik, Kinematik In der Komponentendarstellung gilt: λ · a = (λax, λay, λaz). Für λ = 0 ergibt sich der Nullvektor 0 = (0, 0, 0). 8. Für den Betrag (Länge) eines Vektors a = (ax, ay, az) gilt unter Anwendung des Satzes von Pythagoras a = a 2x + a 2y + a 2z . B 4.4 Der Vektor a sei gegeben durch a = (3, −7, 4). Dann ist der Betrag a = a = 9 + 49 + 16 = 74 ≈ 8,60. B 9. Die Multiplikation von zwei Vektoren a und b ergibt das skalare Produkt a · b mit a ·b = a · b · cos B (a, b) (B (a, b) – der von den Vektoren a und b eingeschlossene Winkel). Geometrisch gedeutet ist das skalare Produkt der Vektoren a und b gleich dem Produkt aus dem Betrag des Vektors a mit der Koordinate der ┴-Projektion (ba) von b auf a b α a ba = b · cos α oder dem Produkt aus dem Betrag des Vektors b mit der Koordinate der ┴-Projektion von a auf b (ab) ab = a ⋅ cos α b α a 31 Einführung in die Physik, Kinematik B Physik B 4.5 Ein typischer Anwendungsfall für das Skalarprodukt ist die Berechnung einer Arbeit (definiert als Produkt aus Kraft mal Weg: W = F · s). Wenn Kraft- und Wegvektor einen Winkel einschließen (z. B. Handwagen), gilt: W = F · s F α s Fs Fs=F · cos α Komponente der Kraft F in s-Richtung Es gilt: W = F · s = Fs·s = F·s · cos α. Der Fall, dass Kraft- und Wegvektor parallel sind, ist im Skalarprodukt enthalten. Es gilt: W = F · s = F·s · cos (0) = F · s. 10. Für das Skalarprodukt gilt in der Komponentendarstellung bx a ⋅ b = (a x a y a z ) ⋅ by = a x bx + a y by + a z bz , b z a ⋅ a = a2 = ax ax + ay ay + az az a = a x 2 + a y2 + a z 2 (Pythagoras). 11. Das äußere oder vektorielle Produkt zweier Vektoren a und b ergibt einen Vektor c mit c = a x b. Er hat die folgenden Eigenschaften: a) c = a·b sin α b) c steht senkrecht auf der durch a und b bestimmten Ebene, wobei c der Flächeninhalt des von a und b aufgespannten Parallelogramms ist. c) Die Orientierung von c wird mit Hilfe der „Rechtsschraubenregel“ bestimmt. c=axb –c = b x a b c b c α a 32 –c α a Physik Einführung in die Physik, Kinematik Für das Vektorprodukt gilt in der Komponentendarstellung: a y bz − a z by a x b = a z bx − a x bz . a x by − a y bx B 4.6 Gegeben seien die Vektoren a = (2, 3, 1) und b = (−1, 2, 4). Für den senkrecht auf a und auf b stehenden Vektor c = a x b sowie für den Flächeninhalt der von a und b aufgespannten Fläche ergibt sich: B 3 ⋅ 4 − 1 ⋅ 2 10 a x b = 1 ⋅ ( − 1) − 2 ⋅ 4 = − 9 , 2 ⋅ 2 − 3 ⋅ ( − 1) 7 c = a x b = 100 + 81 + 49 ≈ 15,2 Flächeneinheiten. 4.4 Differentialquotienten Die Differentialrechnung beschreibt die Änderung von Funktionen und deren Steigung. Daher ist sie – wie wir in Kapitel 5 sehen werden – für die Mechanik von fundamentaler Bedeutung. Gegeben sei die in Bild 4.7 gezeigte Funktion mit einer Sekante durch die Punkte P1 und P. Eine Aufgabe der Differentialrechnung ist es nun, die Steigung der Kurve in einem beliebigen Punkt P zu ermitteln. Dazu vollzieht man den Übergang von Punkt P1 zum Punkt P, d. h. die Sekante wird zur Tangente im Punkt P. y y y2 P1 P1 ∆y y1 Bild 4.7 P α x1 ∆x β x2 P x x Zur Definition des Differentialquotienten Der Differenzenquotient ist dabei gleich dem Anstieg der Sekanten tan α. Beim Übergang P1 → P (oder ∆x → 0) geht die Sekante in die Tangente mit dem Anstieg tan β über. Mathematisch vollzieht sich dabei eine Grenzwertbildung der Sekantensteigung ∆y/∆x und man schreibt: f ( x + ∆x) − f ( x) dy ∆y = lim = lim = tan β . dx ∆x → 0 ∆x ∆x → 0 ∆x M 33 Einführung in die Physik, Kinematik Physik Man bezeichnet den Differentialquotienten dy/dx auch als f '(x) oder y' (Ableitung der Funktion y = f (x)). In der Physik hat man es häufig mit Funktionen zu tun, bei denen die unabhängige Variable die Zeit t ist, d. h. anstatt y(x) schreibt man z. B. x(t). In diesem Fall wird die Ableitung der Funktion x(t) mit einem Punkt gekennzeichnet: x ( t ) = dx dt . dx = x (t) · dt wird als Differential der Funktion x(t) bezeichnet. In Tabelle 4.1 sind einige grundlegende Regeln zur Berechnung der Differentialquotienten verschiedener Funktionen angegeben. Tabelle 4.1 Ableitungen elementarer Funktionen und Ableitungsregeln Funktion Ableitung Funktion Ableitung c = const 0 ln x 1/x c · xn c · n · xn−1 loga x 1 x ln a ex ex sin x cos x ax ax ln a cos x −sin x Funktion Ableitung Funktion Ableitung f ′( x ) f ( x) f ( x) g ( x) g( x ) ⋅ f ′ ( x ) − f ( x ) ⋅ g ′ ( x ) f(x) ± g(x) f ′ (x) ± g ′(x) f(g(x)) g ′(x) ⋅ f ′ ( g ( x ) ) f(x) · g(x) f ′ ( x ) ⋅ g ( x ) + f ( x ) ⋅ g′ ( x ) ln f(x) B B 4.7 g 2 ( x) Die Ableitung einer quadratischen Funktion x (t) = x (t) = 2 · 1 3 t2−1 = 2 3 1 3 t2 ergibt sich zu t , d. h., eine lineare Funktion. Nochmaliges Differenzieren liefert eine konstante Funktion: x (t) = 34 2 3 t1 , x (t) = 1 2 3 t1−1 = 1 · 2 3 · t0 = 2 3 . Physik Einführung in die Physik, Kinematik 4.5 Integrale Die Integralrechnung ist die Umkehrung der Differentialrechnung, d. h. praktisch schließt man von der gegebenen Ableitung einer Funktion auf die Funktion zurück. Die zu bestimmende Funktion wird als Stammfunktion bezeichnet. Man schreibt: Differentialrechnung: f(x) → f ′( x) = dy dx f ′( x) → f ( x) = ∫ f ′( x) dx + c Integralrechnung: . Das Integralzeichen ∫ ... dx wird als Integraloperator bezeichnet. Unbestimmte Integrale haben eine Integrationskonstante, denn die Ableitung einer konstanten Funktion verschwindet. Beim unbestimmten Integrieren ergibt sich also durch eine additive Konstante eine Kurvenschar, wobei die spezielle Lösung durch eine Randbedingung festgelegt wird. In Tabelle 4.2 sind einige grundlegende Regeln zur Berechnung von Integralen angegeben. Tabelle 4.2 Grundregeln zum Rechnen mit unbestimmten Integralen Integral Stammfunktion ∫ xn dx xn +1 für n ≠ −1 n +1 Integral Stammfunktion ∫ ax dx +c 1 ln a ∫ ex dx ex + c ∫ ln x dx ∫ sin x dx −cos + c ∫ loga x dx ∫ cos x dx sin x + c ax + c x(ln x − 1) + c x ln a (ln x − 1) + c Rechenregeln beim Integrieren Differentiation der Integration B 4.8 d dx ∫ f(x) dx f(x) Konstante ∫ c f(x) dx c ∫ f(x) dx Summe ∫ (f(x) + g(x))dx ∫ f(x) dx + ∫ g(x) dx Gegeben sei die lineare Funktion y = 4 · x mit dem konstanten Koeffizienten 4. Für das unbestimmte Integral gilt: ∫ 4 · x dx = 4 ∫ x1 dx = 4 · x1 + 1 1+1 B + C = 2 x2 + C = F (x). Diese Stammfunktion ist eine auf der y-Achse verschobene Parabelschar. Durch eine Randbedingung, z. B. F (x = 2) = 2 (d. h. die Kurve soll durch den Punkt (2, 2) gehen), ergibt sich eine spezielle Lösung: F (x = 2) = 2 · 22 + C = 2, d. h. C = −6, also F (x) = 2 x2 − 6. 35 Einführung in die Physik, Kinematik Ü Ü 4.1 Physik Gegeben sei ein physikalischer Zusammenhang der Form x = k ⋅ t , wobei t die unabhängige und x die abhängige physikalische Größe ist. k sei eine Konstante. Geben Sie geeignete Auftragungen zur Verifizierung dieses Zusammenhangs an! Ü 4.2 Drei Kräfte mit den Komponenten F1 = (2, 2) N, F2 = (−2, 3) N und F3 = (−2, −4) N greifen an einem Massenpunkt P (0,0) an. In welche Richtung wird der Massenpunkt gezogen? Stellen Sie die Vektoren graphisch dar! Ü 4.3 Gegeben sei die Funktion y = 2 x · ex. Geben Sie die erste und die zweite Ableitung an! Bemerkung: Beim Differenzieren eines Produktes zweier Funktionen u und v gilt die Produktregel: y = u (x) · v (x), Ü 4.4 y' = u'(x) · v (x) + v'(x) · u (x). Bestimmen Sie die Stammfunktion für die Funktion: x 3 y=e +2x ! 5 Kinematik In diesem Kapitel werden Sie mit den Grundzügen der Kinematik, d. h., der Bewegungslehre, vertraut gemacht. Nach Durcharbeiten des Kapitels sollten sie S • die Begriffe Geschwindigkeit und Beschleunigung verstanden haben, sowie • in der Lage sein, einfache Bewegungsabläufe berechnen und graphisch darstellen zu können. 5.1 Überblick, Begriffe Die Kinematik untersucht die Bewegungen von Körpern, ohne dabei die Ursachen für die Bewegungen zu beachten. Der einfachste bewegte Körper ist der Massenpunkt. Wie in Beispiel B 1.2 ausgeführt wurde, versteht man unter einem Massenpunkt einen Körper, dessen Größe und Form bei der Beschreibung seiner Bewegung vernachlässigt werden kann. So kann beispielsweise der Umlauf der Erde um die Sonne als Bewegung eines Massenpunktes aufgefasst werden. Die Drehung der Erde um ihre eigene Achse ist in diesem Fall ohne Bedeutung. Jeder feste Körper kann als ein System von starr miteinander verbundenen Massenpunkten aufgefasst werden. 36