Digitale Steuerung
Werbung

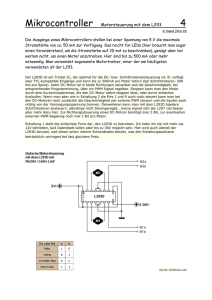
Universität Koblenz – Landau Name: ..................... Institut für Physik Vorname: ..................... Hardwarepraktikum für Informatiker Matr. Nr.: ..................... Digitale Steuerung Versuch Nr.5 Vorkenntnisse: Aufbau eines Gleichstrommotors, Aufbau eines Schrittmotors, L293D, Brückenschaltung, Schaltnetze, Schaltwerke Versuch 5 2 Der Gleichstrommotor Ein Elektromotor besteht aus einem fest stehenden Permanentmagneten in dem sich ein Elektromagnet befindet, der drehbar gelagert ist. Der Elektromagnet ist mit zwei Kollektoren verbunden. Diese bestehen aus Halbzylinder, die fest mit der Rotorachse verbunden sind. Über diese Kollektoren erfolgt mittels zweier Schleifer die Stromversorgung des Elektromagneten. Auf dem Gesetz, dass sich gleiche Magnetpole abstoßen und ungleiche sich anziehen, beruht die Arbeitsweise des Elektromotors. Es stehen sich zunächst gleichnamige Pole der verschiedenen Magneten gegenüber. Sie stoßen sich ab und die Spule macht eine kurze Drehung. Nachdem sich die Spule um ca. 90o gedreht hat, stehen sich nun die ungleichnamigen Pole der Magneten gegenüber. Durch die Kollektoren wechselt jetzt die Stromrichtung und das Magnetfeld dreht sich, so dass sich wiederum die gleichnamigen Pole der Magnete gegenüberstehen. Der Motor dreht weiter. Der Schrittmotor Schrittmotoren werden als hochpräzise Stellelemente in der Elektrotechnik und der Feinmechanik benötigt. Die Drehung der Welle geschieht schrittweise durch ein wanderndes Magnetfeld, das durch paarweise angeordnete, sich kreuzende Stator-Wicklungen erzeugt wird. Vorteil des Verfahrens ist die Möglichkeit, die Welle ganz exakt um einen bestimmten Winkel in der einen oder der anderen Richtung zu verdrehen oder auch eine genau vorherbestimmte Anzahl von Umdrehungen auszuführen. Etwaige Abweichungen pro Drehschritt summieren sich nicht auf: Nach einer Umdrehung steht der Rotor exakt an derselben Position. Der kugelgelagerte Rotor im Inneren hat eine Reihe permanent-magnetischer Pole (DAUERMAGNETE), die sich im kreuzenden Magnetfeld der Statorwicklungen (ELEKTROMAGNETE) drehen. Das Fortschalten zum jeweils nächsten Schritt geschieht immer dann, wenn sich die Magnetrichtung in 2 Versuch 5 3 einem Stator verändert. Und das wiederum kann man durch Umpolen des jeweiligen Statorstroms erreichen (siehe folgende Abildung). Schritt 1 Schritt 2 Schritt 3 Schritt 4 Die gebräuchlichsten Ausführungen sind vier–Phasen Schrittmotoren mit sechs Anschlüssen und zwei–Phasen Schrittmotoren mit 4 Anschlüssen. Bei den im Praktikum verwendeten Schrittmotoren handelt es sich um zwei– Phasen Schrittmotoren. Daher bezieht sich die Anleitung auch nur auf diesen Motorentyp. Wie aus der Abbildung zu erkennen, ist durch ein periodisches Umpolen der Stromrichtung in den Statorspulen eine Rotation des Rotors zu erreichen. Die folgende Tabelle gibt die Reihenfolge der Stromrichtung für die Wicklungen A und B an: Schritt Schritt Schritt Schritt 1 2 3 4 A1 L H H L A2 H L L H B1 L L H H B2 H H L L Durch Umkehrung der Schrittfolge läßt sich die Drehrichtung des Motors ändern. Mehrere versetzte Stratoren sorgen für eine veringerte Schrittweite. Der im Praktikum verwendete Motor besitzt eine Schrittweite von 15o pro Schritt. 3 Versuch 5 4 L 293 D Der Baustein L 293 D ist ein Operationsverstärker zur digitalen Leistungssteuerung. In einem Gehäuse sind je vier Operationsverstärker enthalten. Je zwei Verstärker werden über einen gemeinsamen Eingang EN (enable) aktiviert. Die Eingänge Ai steuern die Ausgänge Yi . Die Eingänge sind mit TTL Pegel anzusteuern. An einem Ausgang Y liegt entweder Masse an (Eingang A=low Pegel) oder es wird eine externe Versorgungsspannung VY an den Ausgang durchgeschaltet (Eingang A=high). Die Versorgungsspannung der Logik Vs beträgt 5V . Die externe Versorgungsspannung kann bis zu 36V betragen. Alle vier Operationsverstärker können zusammen einen Strom von bis zu 1A schalten. Vs 4A 4Y 16 15 14 13 12 1 2 3 4 1Y GND EN1 1. 1A GND GND 3Y 3A EN2 11 10 9 5 6 7 8 GND 2Y 2A Vy Ansteuerung einer Glühlampe Mit einem Leistungstreiber vom Typ L 293 D soll eine einfache digitale Ansteuerung einer Glühlampe realisiert werden. Verwenden Sie sowohl für Vs als auch für Vy das 5V Festspannungsnetzteil. 1.1 Entwerfen und realisieren Sie die Schaltung 4 Versuch 5 1.2 2. 5 Zeichnen Sie das Schaltbild Aufbau einer Brückenschaltung Entwerfen Sie eine Brückenschaltung und verifizieren Sie die Funktion der Schaltung mit einem Messgerät. Die Ansteuerung soll über zwei Taster E1 und E2 erfolgen. Verwenden Sie für Vs das 5V Festspannungsnetzteil. Stellen Sie mit dem regelbaren Netzteil verschiedene Spannungen ≤ 30V für Vy ein. 2.1 Aufgabe Entwerfen und realisieren Sie die Schaltung. 2.2 Aufgabe Geben Sie die Wahrheitstabelle an. E1 0 0 1 1 E2 0 1 0 1 Y1 5 Y2 Versuch 5 6 2.3 Zeichnen Sie das Schaltbild 2.4 Aufgabe Stellen Sie eine Versorgungsspannung Vy von 9 V mit dem regelbaren Netzteil ein. Überprüfen Sie die Spannung mit einem Messgerät. Schließen Sie einen Gleichstrommotor an die Brückenschaltung an. 3. Ansteuerung eines Umsetzroboters Der Umsetzrobotor besitzt zwei Gleichstrommotoren. Ein Motor öffnet und schließt den Greifer, der zweite Motor schwenkt den Arm. In jeder Bewegungsrichtung ist ein Endschalter montiert, so dass ingesamt vier Endschalter vorhanden sind. Die Schalter schliessen, sobald das Ende einer Bewegungsrichtung erreicht ist. Die Schalter schließen gegen Masse (Low-Pegel). 3.1 Aufgabe Entwerfen und realisieren Sie die Schaltungen für beide Motoren. (Die Schaltung ist für beide Motoren identisch.) Stellen Sie eine Versorgungsspannung Vy von 9 V mit dem regelbaren Netzteil ein und überprüfen Sie die Spannung mit einem Messgerät. Bauen Sie zusätzlich eine Sicherungsschaltung mit ein, so dass die Motoren automatisch abgeschaltet werden, sobald ein Endschalter schliesst. Die Ansteuerung der Motoren soll mit je zwei Tastern erfolgen. 6 Versuch 5 7 3.2 Zeichnen Sie das Schaltbild (für die Steuerung eines Motors) 3.3 Aufgabe Entwerfen sie ein Schaltnetz zur automatischen Umsetzung (von links nach rechts). Überlegen Sie unter welchen Umständen (Schalterstellungen) welche Motoren in welche Richtung laufen müssen. Verwenden Sie dabei folgende Symbole: TGZ : Taster Greifer geschlossen TGO : Taster Greifer geöffnet TAL : Arm linker Anschlag TAR : Arm rechter Anschlag 7 Versuch 5 3.4 8 Erstellen Sie die Schaltfunktionen für: Motor Greifer zu: Motor Greifer auf: Motor Arm rechts: Motor Arm links: 3.5 4 Realisieren Sie die Schaltungen Schrittmotor 4.1 Aufgabe Steuern Sie einen Schrittmotor mit zwei Brückenschaltungen an. Bedenken Sie, dass laut Ansteuerungstabelle in den Wicklungen immer Strom fließt. Es gilt: A1 = A2 . Die Ansteuerung kann daher nur mit einem Taster pro Wicklung erfolgen. Verifizieren Sie die Ansteuerungsfolge des Zwei–Phasen Schrittmotors. Rechtslauf A1 A2 Schritt 1 Schritt 2 Schritt 3 Schritt 4 8 B1 B2 Versuch 5 9 Linkslauf A1 A2 B1 B2 Schritt 1 Schritt 2 Schritt 3 Schritt 4 4.2 Aufgabe Entwerfen Sie ein Schaltwerk, das die Ansteuerung für beide Drehrichtungen übernimmt. Zustandfolgetabelle: x D1 D0 Übergangsfunktionen: D0+ : D1+ : 9 D1+ D0+ Versuch 5 10 Schaltwerk: 4.3 Realisieren Sie die Schaltung Verwenden Sie sowohl für Vs als auch für Vy das 5V Festspannungsnetzteil. Benutzen Sie als Taktgenerator den Funktionsgenerator. Stellen Sie ein Rechtecksignal ein und greifen Sie das Signal am TTL Ausgang ab. Stellen Sie zunächst eine Frequenz von 10 Hz ein. 4.4 Ermitteln Sie die max. Umdrehung Regeln Sie langsam die Frequenz hoch. Bis zu welcher Frequenz dreht der Motor stabil? Fmax = und berechnen Sie daraus die max. Umdrehung pro Minute Umax /min = 10