Die Punktwolke aus Sicht der Mustererkennung
Werbung

ARCHITEKTUR
VERMESSUNG
Oliver Bringmann, Dresden
Die Punktwolke aus Sicht der Mustererkennung
Laserscanning im Architekturaufmaß
Punkte und Pilze
Meine Freundin und ich essen gern frische
Waldpilze. Für eine erfolgreiche Pilzernte
muß man in unserer Gegend ganz früh raus
aus der Stadt, womit unser Problem entsteht: Gerade am Wochenende steht meine
Freundin nicht gern früh auf. Und ich weiß
fast nichts über die verschiedenen Pilzsorten. Um dem Dilemma zu entgehen,
haben wir folgendes Verfahren ersonnen:
Ich gehe im Morgengrauen allein in den
Wald und nehme einfach alles mit, was
halbwegs nach Pilz aussieht. Später sortiert meine Freundin das Ergebnis der
Mühe. Dabei landen leider 98% der Pilze
im Kompost und auch beim Rest ist sie nie
ganz sicher, weil die Pilze nun nicht mehr in
ihrer natürlichen Umgebung zu begutachten sind ...
Beim immer populärer werdenden Laserscanning werden in erstaunlich kurzer Zeit
extrem viele 3D-Punkte erfaßt. Die entstehende – visuell sehr ansprechende –
Punktwolke ist jedoch oft noch weit vom
angestrebten Ergebnis der Bestandserfassung entfernt. Um den bei der Verarbeitung
der Punktwolke erreichbaren Automatisierungsgrad zu beurteilen, muß man die Art
der gewünschten Zieldatenstruktur genau
betrachten. Von Genauigkeits-, Kostenund anderen Problemen mit momentan
verfügbaren Scannern kann bei einer algorithmischen Auslotung der Möglichkeiten
abstrahiert werden (Bild 1).
Drei spezielle Sorten von Zieldaten werden
im Weiteren als Repräsentanten gängiger
Bild 1: Welche Zieldaten lassen sich effektiv aus
der Punktwolke ableiten?
➩?
Der Vermessungsingenieur 2/02
l
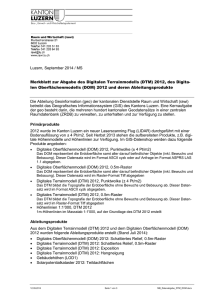
Bauteilmodell
Rohrleitungsmodell
Gebäudemodell
Bild 2: Drei Klassen von Datenstrukturen
Problemklassen beleuchtet und bezüglich
der Eignung des Laserscannings für die
Datengewinnung eingeordnet. Zunächst
erfolgt eine grobe Gliederung in Oberflächen- und Bauteilmodelle. Anschließend
werden zwei verschiedene Typen von Bauteilmodellen unterschieden (Bild 2).
Oberflächenmodell
Die Szenerie wird beim Oberflächenmodell
durch eine oder mehrere in den 3D-Raum
der Sprengung in einem Steinbruch das
Volumen des abgetragenen Materials ermittelt werden, kann dies vollautomatisch
durch Differenzbildung der vor und nach
der Sprengung ermittelten Oberflächenmodelle erreicht werden.
Auch für die Konstruktion eines Gerüsts
um ein stark strukturiertes Gebäude kann
der meßtechnische „Abguß“ des Gebäudes ausreichend sein. Die Details des
Bauwerks interessieren nicht.
Skulpturen oder komplizierte Ornamente
können kaum sinnvoll in genormte Bauteile
zerlegt werden. Auch hier ist ein Oberflächenmodell zur Dokumentation geeignet.
Die Punktwolke des Laserscanners ist
nach der Registrierung mehrerer Scanns
und erfolgter Dreiecksvermaschung ein
Oberflächenmodell. Bei räumlich stark
strukturierten Oberflächen kommen die
Vorteile des Laserscannings gegenüber
➩
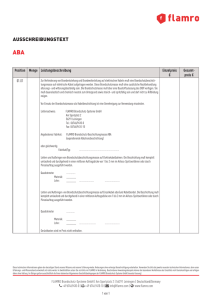
Bild 3: Von der Punktwolke automatisch zur Dreiecksvermaschung
Klassifikation der Zieldaten
200
Oberflächenmodell
eingebettete gekrümmte Fläche(n) beschrieben. Meist wird in der Praxis eine
stückweise planare Approximation dieser
Flächen (Dreiecksvermaschung) verwendet. Topologisch ist ein Oberflächenmodell
die Zerlegung der Welt in Innen und
Außen, bzw. Objekt und nicht Objekt.
Synonym zur Bezeichnung Oberflächenmodell werden Begriffe wie Volumen- oder
Störkantenmodell verwendet (Bild 3).
Ein Oberflächenmodell ist für Anwendungen hilfreich, die nur die Geometrie, nicht
aber die tiefere Semantik der modellierten
Szene benötigen. Soll beispielsweise bei
Die Punktwolke aus Sicht der Mustererkennung
der Nahbereichsphotogrammetie besonders zur Geltung.
Bauteilmodelle
Ist eine inhaltlich fein granulierte Zerlegung
der Szene für den endgültigen Nutzungszweck erforderlich, reicht das Oberflächenmodell nicht mehr. Eine Zerlegung der Welt
in verschiedene typisierte Objekte wird
benötigt und als Bauteilmodell bezeichnet.
Andere häufig verwendete Bezeichnungen
für Bauteilmodelle sind: sematisches
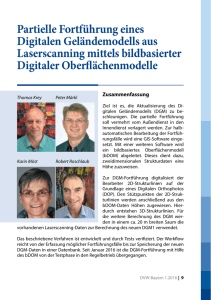
Modell, objektorientiertes Modell oder einfach „intelligente“ Objekte (Bild 4).
➩
Bild 4: Vom Oberflächen- zum Bauteilmodell: ein Quantensprung
Sollen beispielsweise bei der Gebäudebestandserfassung Pläne, Flächen- und
Stücklisten generiert werden, muß die
Szene in den Begriffen Wand, Tür, Fenster
und Raum beschrieben werden. Die Szene
bzw. die Inhalte der Punktwolke müssen
dazu interpretiert, die enthaltenen Objekte
erkannt und in Beziehung gesetzt werden.
Die für die Begriffszuordnung notwendige
Abstraktionsleistung kann in vielen Fällen
heute nur der Mensch erbringen. Um Probleme der automatischen Objekterkennung in einfach und schwierig zu klassifizieren, muß ein wenig über gängige Ver-
fahren der Mustererkennung berichtet
werden.
Wie werden Objekte erkannt?
Vereinfachend
wird
im
Folgenden
beschrieben, wie ein Kreis in einer 2DPunktwolke P = {p1... pn} mit n Punkten
erkannt wird. Es müssen der Mittelpunkt
m = (x, y) und der Radius r des Kreises,
zusammen also drei unabhängige Parameter bestimmt werden (Bild 5).
Für jede Konfiguration der Kreis-Parameter
wird eine Bewertung des Kreises vorgenommen:
Bild 5: Der Kreis wird an
die Punktwolke angepaßt
Bild 6: Die Summe der Abstände wird minimiert
abweichung (m,r)
3D-Parameterraum = (m,r) = (x,y,r)
abweichung (m, r)
= Σ abstand(kreis(m, r), p)
pP´
Diese abweichung muß minimiert werden.
P´ sei der Teil der gesamten Punktwolke,
der sich in der geometrischen Umgebung
des Kreises befindet. Die Optimierung der
abweichung erfolgt mittels sogenannten
Simulated Annealings, einem gängigen
Verfahren zur Parametervariation.
In Bild 6 ist die Zielposition des Kreises und
das (eigentlich vierdimensionale) Gebirge
der Abweichung über den drei Parametern
dargestellt.
Probabilistische Verfahren wie Simulated
Annealing liefern gute Ergebnisse, wenn
das Gebirge wie in der Bild 7 eine Himalaja-Struktur, d. h. ausgeprägte Optima
aufweist.
Betrachtet man das scheinbar nur wenig
komplexere Objekt Viereck, kommt man zu
einem ganz anderen Resultat: Die Optimierung ist hier wesentlich weniger erfolgreich,
weil das Gebirge stark zerklüftet ist. Das
globale Optimum wird nicht immer gefunden. Begründet ist die ungünstige Gebirgestruktur durch die hohe Dimension des
Merkmalsraums. Für ein Viereck sind die
vier Ecken (e1... e4), also acht freie Parameter zu bestimmen (Bild 7).
Verallgemeinert man diese Beobachtung
wird deutlich, warum bei der Analyse von
Bauteilmodellen zwischen Rohrleitungsund Gebäudemodell unterschieden werden muß. Die Freiheitsgrade der Modelle
unterscheiden sich fundamental. Ein zylinderisches Rohr wird z. B. durch den Verlauf
seiner Achse im 3D-Raum und seinen
Radius – also durch nur sieben Parameter
– redundanzfrei beschrieben. Für die verschiedenen Ausprägungen der Klasse
Fenster kommt man dagegen leicht auf
Die Punktwolke aus Sicht der Mustererkennung
l
Der Vermessungsingenieur 2/02
201
abweichung (m,r)
8D-Parameterraum = (e1... e4)
Bild 7: Die Minimierung scheitert wegen der vielen Freiheitsgrade des Modells und der resultierenden schroffen Gebirgsstruktur
Bild 8: Anwendungen und
adäquate Technologien
Laserscanning
Photogrammetrie
Tachymetrie
mehr als 20 Parameter. Die automatische
Interpretation der Punktwolke ist daher für
geometrisch-standardisierte Domänen wie
Industrieanlagen wesentlich leichter möglich, als für variantenreichere Szenerien wie
man sie beispielsweise in Gebäuden vorfindet. Dort kommt erschwerend hinzu, daß
stets auch mit nicht modellierten Gegenständen, wie Topfpflanzen oder Papierkörben gerechnet werden muß. Während bei
einem Rohrleitungssystem davon ausgegangen werden kann, daß für fast jeden
Punkt der Wolke eine Klassenzuordnung
vorgenommen werden kann, trifft diese
geschlossene-Welt-Annahme (wichtiges
Konzept in der Mustererkennung) beim
Gebäude nicht zu.
Keine Universaltechnologie
in Sicht
Die Entscheidung über die geeignete Meßtechnologie ist nicht trivial. Auch mit dem
Laserscanning wird dem Ingenieur kein Allheilmittel geboten, sondern eine interessante Speziallösung.
● Ist das Endprodukt der Messung ein
176 x 60 mm
202
Der Vermessungsingenieur 2/02
l
Die Punktwolke aus Sicht der Mustererkennung
Oberflächenmodell, so ist Laserscanning das Mittel der Wahl.
● Erfordert das Endprodukt der Messung
sehr viel Abstraktionsvermögen, greift
man besser auf dem Menschen verständlichere Primärdaten als die Punktwolke zurück.
Soll eine Fassade inhaltlich ausgewertet
werden, ist Photogrammetrie, also das
Messen in Bildern effektiv. Für die Erfassung von Grundrissen, Schnitten oder
auch 3D-Modellen für Architekturapplikationen bzw. Daten für das Facility Management ist die Tachymetrie, also das Messen
der relevanten Parameter am natürlichen
Objekt, vorzuziehen.
● Sind als Zieldaten Pläne und komplizierte Bauteile gefragt, ist Laserscanning
kaum geeignet.
Eine Ausnahme bildet die Messung geometrischer Elementarkörper z. B. in der
Anlagenvermessung. Hier sind gute algorithmische Ansätze verfügbar.
Die qualitativen Kurven in Bild 8 illustrieren
die Zuordnung der Technologien zu einigen
Anwendungsfällen aus der subjektiven
Sicht des Autors.
Übrigens, das recht unökologische Verfahren zum Sammeln von Pilzen hat meine
Freundin dann doch verworfen. Zu Weihnachten habe ich ein sehr aufschlußreiches
Pilzbuch bekommen und so kann auch in
der nächsten Pilzsaison der Wecker ausgeschaltet bleiben ...
Autor
Oliver Bringmann,
c/o kubit GmbH, Software für
Vermessung, Bau und Architektur,
Altplauen 19, 01187 Dresden,
Tel.: 03 51-4 71 83-12, Fax: -17, www.kubit.de