5. Antriebe mit Asynchronmaschine
Werbung

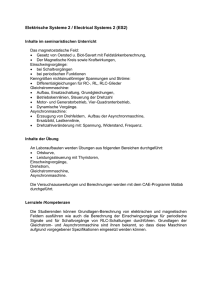
EL4 Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine Inhalt 5. Antriebe mit Asynchronmaschine ................................................................................... 2 5.1 Einleitung............................................................................................................................... 2 5.2 Asynchronmaschine mit Kurzschlussläufer ....................................................................... 3 5.2.1 Aufbau .............................................................................................................................. 3 5.2.2 Statordrehfeld ................................................................................................................... 4 5.2.3 Wirkungsweise ................................................................................................................. 4 5.2.4 Ersatzschaltung ................................................................................................................ 6 5.2.5 Leistungsfluss................................................................................................................... 9 5.2.6 Betriebskennlinien ......................................................................................................... 10 5.2.7 drehzahlvariabler Betrieb ............................................................................................... 12 5.3 Sanftanlasser für Asynchronmaschinen ........................................................................... 13 5.3.1 Einleitung ....................................................................................................................... 13 5.3.2 Drehstromsteller-Typen ................................................................................................. 15 5.3.3 Drehstromsteller mit RL-Last ........................................................................................ 16 5.4 Umrichter ............................................................................................................................ 19 5.4.1 Einleitung ....................................................................................................................... 19 5.4.2 Aufbau, Eigenschaften ................................................................................................... 20 5.4.3 Netzstromrichter für Wechselstrom ............................................................................... 22 5.4.4 Netzstromrichter für Drehstrom ..................................................................................... 24 5.4.5 Zwischenkreis ................................................................................................................ 26 5.4.6 Pulsstromrichter für Wechselstrom ................................................................................ 27 5.4.7 Maschinenstromrichter: Pulsstromrichter für Drehstrom .............................................. 29 5.5 Literaturverzeichnis ........................................................................................................... 34 15.12.15 / sbrw 5-1 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.1 Einleitung 5. Antriebe mit Asynchronmaschine 5.1 Einleitung Die Asynchronmaschine (ASM) wurde Ende des 19. Jh. entwickelt. Sie wird mit Drehstrom betrieben. Die häufigste Ausführung (mit Kurzschlussläufer) ist robust und einfach aufgebaut. Dadurch ist ihre Herstellung günstig und die Wartung gering, was gewichtige Vorteile sind. Sie kann am Drehstromnetz anlaufen und arbeitet dann mit fast konstanter Drehzahl als drehzahlstatischer Antrieb: Pumpe, Lüfter, Kompressor (Druckluft, Kälte). Abbildung 5-1 Explosionszeichnung einer ASM (© CEG motori elettrici) Drehzahl und Drehmoment wurden früher mit externen Widerständen verstellt und benötigten einen Rotor mit Schleifringen (Schleifringläufer). Heute wird dazu meistens ein Stromrichter (Umrichter) verwendet, der keine Schleifringe benötigt und verlustarm arbeitet. In einem weiten Leistungsbereich (0.5 kW bis 5 MW) ist das der häufigste drehzahlvariable Antrieb. Einsatzgebiete: Förderband, Zentrifuge, Rührwerk, Pumpe, Lüfter, Kompressor, verschiedenste Werkzeugmaschinen (Herstellung, Bearbeitung von Gütern), Elektrofahrzeuge (Zug, Tram, Trolleybus, Werkfahrzeuge). Asynchronmaschinen können auch am Wechselstrom betrieben werden, wenn mit einer Hilfsvorrichtung (Kondensator oder Spaltpol) dafür gesorgt wird, dass im Stator ein Drehfeld entsteht. Solche Asynchronmaschinen kleiner Leistung werden häufig als wartungsfreier Lüfterantrieb in elektronischen Geräten eingesetzt. Abbildung 5-2 S-Bahn mit ASM, Umrichter als drehzahlvariabler Antrieb (www.stadlerrail.com) 5-2 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer 5.2 Asynchronmaschine mit Kurzschlussläufer 5.2.1 Aufbau Eine Asynchronmaschine besteht aus Stator (Ständer) und Rotor (Läufer). Der Luftspalt wird möglichst klein dimensioniert, um eine gute magnetische Kopplung zwischen Stator und Rotor zu erzielen. Stator und Rotor tragen im Eisen über den ganzen Umfang verteilte Wicklungen. Beim Stator ist es immer eine Drehstromwicklung (Stern oder Dreieck). Abbildung 5-3 links: Querschnitt ASM; rechts: Stator Beim Rotor gibt es 2 verschiedene Varianten: meistens Kurzschlussläufer, selten Schleifringläufer. Beim Kurzschlussläufer werden die Windungen mit Stäben ausgeführt und über Ringe an den Enden kurzgeschlossen. Das erlaubt eine vereinfachte Konstruktion. Abbildung 5-4 Rotor; links: Kurzschlusskäfig aus Aluminium (vom rechts: Schleifringläufer mit gewickelter Drehstromwicklung Eisen getrennt); Der Schleifringläufer trägt eine Drehstromwicklung (Stern oder Dreieck). Ihre Anschlüsse werden auf Schleifringe geführt und sind über Kohlebürsten (Wartung) mit den Anschlussklemmen des Rotors verbunden. 5-3 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer 5.2.2 Statordrehfeld Wenn eine Drehstrommaschine (Asynchron-, Synchronmaschine) ans Netz geschaltet wird, fliessen im Stator (Index 1) 3 Strangströme mit der Frequenz f1. i1U(t) i1V(t) t1 Abbildung 5-5 i1W(t) t2 Strangströme Stator Die Ströme erzeugen zusammen im Rotor (Index 2) ein veränderliches magnetisches Feld. Für diese Betrachtung genügt eine vereinfachte Statorwicklung, die Rotorwicklung wird nicht benötigt. 1U1 1U1 1W2 1 1V2 1W2 1 1V2 1V1 1W1 1 1V1 1W1 1 1U2 1U2 Zeitpunkt t1 Abbildung 5-6 Zeitpunkt t2 Statorströme, Feldlinien im Rotorraum (zu vervollständigen) Das magnetische Feld in diesem Rotor hat 2 Pole, seine Polpaarzahl p beträgt 1. Es dreht sich mit der Winkelgeschwindigkeit D1 bzw. mit der Synchrondrehzahl n1 und heisst Drehfeld. 2 f1 (5-1) Winkelgeschwindigkeit Statordrehfeld D1 1 p p f 60s (5-2) Synchrondrehzahl Statordrehfeld n1 1 p min 5.2.3 Wirkungsweise Die Wirkung ist gleich, aber einfacher verständlich, wenn der Rotor mit drei kurzgeschlossenen Strängen betrachtet wird anstatt mit einem Kurzschlusskäfig. Der Rotor hat die Drehzahl n. 5-4 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer Synchroner Lauf: Wenn der Rotor mit derselben Drehzahl n dreht wie das Statordrehfeld, bleibt das magnetische Feld in den Rotorsträngen konstant. Ohne Feldänderung wird keine Spannung induziert (Induktionsgesetz). Es fliesst kein Rotorstrom und es entsteht keine Lorentz-Kraft auf die Rotorleiter. Dieser Fall heisst synchroner Lauf und entspricht dem Leerlauf bei vernachlässigbarer Reibung. Asynchroner Lauf: Sobald jedoch die beiden Drehzahlen n1, n voneinander abweichen, ändert das Feld in den Rotorsträngen mit der Frequenz f2. Die Feldänderung induziert in jedem Rotorstrang eine Wechselspannung, die in der kurzgeschlossenen Wicklung einen Wechselstrom erzeugt. Der Strom ist so gerichtet, dass er seiner Ursache entgegenwirkt (Lenz’sche Regel). Die Abweichung der beiden Drehzahlen ist entscheidend für die Wirkung und gibt der Maschine ihren Namen: Asynchronmaschine. Die Abweichung kann mit verschiedenen Grössen beschrieben werden. Die wichtigste ist der Schlupf s; er wird in Prozent angegeben. f 2 n1 n p s f1 s f 2 D1 n1 n f1 D1 n1 D 2 2 2 f 2 D1 p p D1 1U1 1W2 1 1V2 2V2 2U1 (5-3) Schlupf (5-4) Winkelgeschwindigkeit Drehfeld bezüg(5-5) lich Rotor Grössen im Zeitpunkt t1: n(t1) < n1(t1) f2(t1) . . . . 0 Rotorstrang 2U1-2U2: 2W1 2W2 Rotorfrequenz ui2U(t1) = 1V1 2V1 2U2 1W1 1 i2U(t1) . . . . 0 .......... 1U2 B1(t1) Zeitpunkt t1 Abbildung 5-7 (t1) . . . . 0 Betriebsfall: . . . . . . . . . . . . . . . . . . . . . . Rotor dreht langsamer als Statordrehfeld (zu vervollständigen) L2 Ui2 R2 I2 Abbildung 5-8 Ersatzschaltung kurzgeschlossener Rotorstrang Rotorspannung: Stator und Rotorwicklung sind gekoppelt, ähnlich wie Primär- und Sekundärwicklung eines Trafos. Aber die Frequenz im Rotor ist schlupfabhängig. Nur bei Stillstand des Rotors (s = 1) ist die Rotorfrequenz gleich gross wie die Statorfrequenz. Dann induziert das Statordrehfeld in den Wicklun- 5-5 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer gen des Rotors die Spannung Ui20. Sie ist nur bei einem Schleifringläufer messbar. Bei kleinerem Schlupf nimmt sie ab. Ui 2 s Ui 20 induzierte Wechselspannung Rotorstrang (5-6) Ui20 Ui2 Abbildung 5-9 Rotorspannung und Rotorfrequenz in Funktion von Schlupf (bzw. Winkelgeschwindigkeit des Rotors) Rotorstrom: Die induzierte Spannung ist zusammen mit dem Widerstand Z2 des Rotorstranges massgebend für den Strom. I2 Ui 2 Z2 Wechselstrom Rotorstrang (5-7) Drehzahl, Drehmoment: Wenn die Maschine im Leerlauf ist und nun belastet wird, sinkt die Drehzahl leicht ab. Dadurch steigen Schlupf, induzierte Rotorspannung, Rotorstrom und damit das Drehmoment zunächst linear an. Drehzahl und Winkelgeschwindigkeit lassen sich einfach mit dem Schlupf ausdrücken. n 1 s n1 (5-8) Drehzahl Rotor 2 f1 (5-9) Winkelgeschwindigkeit Rotor p Das Drehmoment hängt ebenfalls vom Schlupf ab. Es lässt sich jedoch erst mit Hilfe der Grössen aus der Ersatzschaltung berechnen. 1 s 5.2.4 Ersatzschaltung Rotorstrang: Die Ersatzschaltung besteht aus der Spannungsquelle Ui2 für die induzierte Spannung, der Streuinduktivität L2 und dem Leiterwiderstand R2 der Wicklung. I2 I2 R2 L2 L2 1/s R2 f1 f2 Ui2 Ui20 Abbildung 5-10 links: Rotorersatzschaltung für Rotorfrequenz f2; rechts: Rotorersatzschaltung für Statorfrequenz f1 5-6 Rmech ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer Die Ersatzschaltung für die Rotorfrequenz f2 kann mit Hilfe des Schlupfes auf die Statorfrequenz f1 umgerechnet werden. Dabei entsteht ein zusätzlicher Widerstand Rmech (Motorbetrieb). Die Leistung der 3 Strangwiderstände Rmech entspricht der innere Leistung Pi, die an den mechanischen Teil abgegeben wird (elektro-mechanische Umwandlung). Ui2 ; s 1 L 2 2 L 2 ; s R R2 Rmech 2 s 1 s Rmech R2 s U i 20 Umrechnung auf Statorfrequenz (Motorbetrieb) (5-10) äquivalenter Lastwiderstand (Motorbetrieb) (5-11) Die Ersatzschaltung gilt auch beim Kurzschlussläufer. Allerdings können die Ersatzelemente nicht mehr physikalisch direkt identifiziert werden. Maschinenstrang: Die Ersatzschaltung des Statorstranges besteht aus denselben Elementen wie die Primärseite eines Transformators: Leiterwiderstand R1, Streuinduktivität L1, Hauptinduktivität Lh und Eisenverlustwiderstand RFe. Die Hauptinduktivität ist massgebend für die Magnetisierung des Eisens von Stator und Rotor. Wegen der transformatorischen Kopplung von Statorwicklung und Rotorwicklung können die beiden Ersatzschaltungen kombiniert werden. Es entsteht dieselbe Ersatzschaltung wie beim Trafo. ideal I1 R1 L1 U1 Uh Lh Abbildung 5-11 R2 L2 ü Ui20 I2 Rmech U2 RFe Ersatzschaltung Maschinenstrang mit Übertrager Die Rotorseite kann wie beim Trafo mit Hilfe der Übersetzung ü auf die Statorseite umgerechnet werden. Die Übersetzung entspricht dem mit den Wicklungsfaktoren kW ergänzten Windungsverhältnis. U Uh k N Übersetzung ü h W1 1 (5-12) U i 20 U i 2 kW 2 N 2 s I1 R1 R2’ L2’ L1 U1 Lh RFe Uh = Ui20’ I2’ Rmech’ U2’ Abbildung 5-12 Ersatzschaltung Maschinenstrang, auf Statorseite umgerechnet Bestimmen der Ersatzschaltung: Sie erfolgt ähnlich wie beim Transformator mit Hilfe der beiden Grenzzustände und unter Berücksichtigung der Schaltungsart (Stern oder Dreieck): - Messung des Wicklungswiderstandes R1 5-7 ZHAW / SoE Grundlagen Antriebstechnik - 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer Leerlaufversuch mit Nennspannung (s = 0; Rmech ; I2 0); Bestimmung von Lh, RFe Stillstandversuch (blockierter Rotor) mit reduzierter Spannung und Nennstrom (s = 1; Rmech = 0; „Kurzschluss“); Bestimmung von L1= L2‘, R2‘ Berechnung mit Ersatzschaltung: Die Elemente werden am besten zusammengefasst, um die Berechnung zu vereinfachen. 1 Z 1 R1 j1 L1; Z 2 ' R2 ' j1 L2 '; Y 3 GFe j1 Lh Z2’ Z1 I1 U1 Y3 Abbildung 5-13 (5-13) I2’ Rmech’ Uh = Ui20’ U2’ Ersatzschaltung Maschinenstrang mit zusammengefassten Elementen Mit Hilfe der bekannten Gleichungen (Masche, Knoten, Serie-, Parallelschaltung) und der Schaltungsart können die elektrischen Grössen der Asynchronmaschine nun berechnet werden. vereinfachte Ersatzschaltungen: Prinzip: Bei Serieschaltung sind verhältnismässig kleine Widerstände vernachlässigbar, bei Parallelschaltung verhältnismässig grosse. Bei Leerlauf (Rmech‘ ) kann folglich der Rotor vernachlässigt werden. Beim Stator spielen noch der Magnetisierungsstrom (Lh) und die Kupferverluste (R1) eine Rolle. I10 R1 U10 Lh Abbildung 5-14 Vereinfachte Ersatzschaltung Leerlauf (Index 0; Strang). Bei grösseren Maschinen und kleinen Streuungen kann die Aufteilung von Kupferverlusten und Streuung vernachlässigt werden. Oft sind auch die Eisenverluste klein. Es gilt dann die vereinfachte Ersatzschaltung gemäss Abbildung 5-15. R1 I1 U1 Lh L1+ L2‘ Uh R2‘ I2’ Rmech’ U2’ Abbildung 5-15 Vereinfachte Ersatzschaltung grössere Maschinen belastet (Strang). 5-8 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer 5.2.5 Leistungsfluss Motorbetrieb: Für die Berechnung werden die primären und sekundären Stranggrössen (Index 1, 2) verwendet. Um die Leitergrössen des Stators zu erhalten, muss die Schaltungsart (Stern oder Dreieck) noch berücksichtigt werden. S1 3 U1 I1 (5-14) primäre Scheinleistung P1 S1 cos 1 primäre Wirkleistung (5-15) PV 1 3 R1 I12 Wicklungsverluste Stator (5-16) PFe U h2 U12 3 3 RFe RFe PL P1 PV 1 PFe Eisenverluste PV 2 Pi PV 2 M i D1 s (5-17) Luftspaltleistung (5-18) Wicklungsverluste Rotor (5-19) Pi PL PV 2 1 s PL 3 Rmech ' I 2 ' 2 M i innere Leistung, elektro-mechanische Wandlung (5-20) PReib MV Reibungsverluste (5-21) PM Pi PRe ib M mechanische Leistung (5-22) PV 2 s PL 3 R2 ' I 2 ' 2 M i D 2 Im Motorbetrieb wird die Maschine elektrisch gespeist und gibt mechanische Leistung ab. Sie läuft untersynchron. Alle Leistungen sind positiv. PV2/3 PV1/3 Rmech‘ = PL /3 Pel /3 Pi /3 PM /3 PReib /3 PFe /3 Abbildung 5-16 Leistungsfluss pro Strang Bedingungen für Motorbetrieb: 0 1 90; 0 s 1; 0 n n1; 5-9 M i M Re ib (5-23) ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer Im Generatorbetrieb wird die Maschine mechanisch angetrieben und gibt elektrische Leistung ab. Sie läuft übersynchron. Die Gleichungen gelten weiterhin. Die Leistungen PM, PL, Pi und P1 werden negativ. Bedingungen für Generatorbetrieb: (5-24) 90 1 180; s 0; n n1; M M Re ib Um die Drehrichtung im Netzbetrieb zu ändern, müssen 2 Aussenleiter des Drehstromanschlusses vertauscht werden. 5.2.6 Betriebskennlinien Drehzahl-Drehmoment-Kennlinie: Das Drehmoment kann mit Hilfe des vollständigen Ersatzschemas und der Gleichung (5-20) berechnet werden. Pi 3 Rmech ' I 2 ' 2 PL Mi D1 inneres Moment (5-25) Die Berechnung kann vereinfacht werden, falls die Kopplung zwischen Stator und Rotor gut ist, Dazu werden die sog. Kippdaten benötigt. Wenn die Maschine aus dem Leerlauf belastet wird, steigt das Drehmoment stark an. Wird die Belastung immer weiter erhöht, fällt das Drehmoment plötzlich ab auf einen kleineren Wert und die Maschine bleibt stehen bis die Belastung wieder reduziert wird. Der Punkt mit maximalem Drehmoment heisst Kipp-Punkt (Index K), sein Moment MK wird als Kippmoment bezeichnet, sein Schlupf sK als Kippschlupf. X X h 𝑀𝑖 ≈ 𝑀𝐾 𝑠 𝑠𝐾 2 𝑠 + 𝐾 3 𝑝 𝑈1 2 𝑀𝐾 ≈ 2 1 𝑋 𝑠𝐾 ≈ 𝑅2 ′ 𝑋 gute Kopplung (Bed. für (5-27) - (5-29)) (5-26) inneres Moment, Kloss’sche Gleichung (5-27) Kippmoment, maximales Moment (5-28) Kippschlupf (5-29) 𝑠 Es treten drei verschiedene Betriebsbereiche auf: - Bereich M, Motorbetrieb 0 < n < n1: Der Rotor eilt dem Statordrehfeld nach und läuft untersynchron. - Bereich G, Generatorbetrieb n > n1: Der Rotor eilt dem Statordrehfeld vor und läuft übersynchron. - Bereich B, Gegenstrombremse oder gegensynchroner Betrieb n < 0: Der Rotor dreht sich gegen das Statordrehfeld. Der Schlupf ist grösser als eins. Sowohl die Bremsleistung wie auch die im Stator zugeführte Leistung werden im Rotor umgesetzt. Bei einem Schleifringläufer kann die Leistung nach aussen abgeführt werden. Bei einem Kurzschlussläufer ist das ein für die Rotorerwärmung kritischer Betriebsfall. 5-10 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer Abbildung 5-17 Kennlinien Mi = f(n) und Mi = f(s) (zu vervollständigen) Statorstrom: Der Statorstrom eines Stranges kann mit Hilfe der Ersatzschaltung und dem Schlupf berechnet werden. I1 U1 Ztot Z 1 U1 1 Y3 U1 1 Z 2 ' Rmech ' Z1 1 Y3 1 jX 2 ' R2 '/ s Anlauf; s = 1 >> sK (5-30) Im Leerlauf fliesst der Leerlaufstrom I10. Er magnetisiert die Maschine, deckt die Eisen- und die Reibungsverluste. Sobald der Schlupf zunimmt, steigen Moment und Strom stark an. Übersteigt der Schlupf den Kippschlupf, sinkt das Moment wieder auf das Anlaufmoment MA ab, der Strom jedoch steigt noch weiter an bis zum Anlaufstrom I1A (entspricht Kurzschlussstrom beim Trafo). I1,A M(n) MK MN MA I1(n) I1,N I1,0 0 nK nN n0 Abbildung 5-18 Statorstromkennlinie und Drehmomentkennlinie 5-11 n ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.2 Asynchronmaschine mit Kurzschlussläufer 5.2.7 Drehzahlvariabler Betrieb Die Drehzahl hängt von Statorfrequenz f1, Schlupf s und Polpaarzahl p ab. n 1 s f1 p (5-31) Drehzahl Rotor Somit bestehen grundsätzlich 3 Varianten, die Drehzahl zu verändern: Frequenzsteuerung Schlupfsteuerung Änderung der Polpaarzahl - Frequenzsteuerung: Dazu wird ein Stromrichter benötigt, der das Drehstromnetz umformt in ein Drehstromnetz mit variabler Frequenz und Spannung. Er wird als Umrichter oder Frequenzumrichter bezeichnet. Diese Variante ist heute die häufigste Form der Drehzahlsteuerung mit Asynchronmaschine. 3 3 ASM UN, fN M, UM, fM Abbildung 5-19 ASM Blockschema drehzahlvariabler Antrieb mit Umrichter und Bereich 1 mit konstantem Feld: Wird nur die Statorfrequenz linear abgesenkt, sinkt der Blindwiderstand Xh der Hauptinduktivität. Deshalb steigt der Magnetisierungsstrom durch die Hauptinduktivität an und bringt das Eisen in die Sättigung. Um das zu vermeiden, muss gleichzeitig auch die Statorspannung linear abgesenkt werden. Dann bleibt die Amplitude des Drehfelds konstant. Bei tiefen Frequenzen muss der Kupferwiderstand R1 berücksichtigt werden. Deshalb darf die Statorspannung nicht zu tief werden. Die kombinierte Frequenz- und Spannungssteuerung führt im Bereich vom Stillstand bis zu der Nenndrehzahl zu einem näherungsweise konstanten Kippmoment(Abbildung 5-20). M(n) f<f0 f=f0 U1(n) f>f0 n 0 n0 Abbildung 5-20 Drehmomentkennlinie ASM bei U/f Steuerung der Statorspannung Bereich 2 mit Feldschwächung: Die Statorspannung kann nicht über die Nennspannung erhöht werden. Die Statorfrequenz kann jedoch weiter erhöht werden. Dadurch sinkt der Magnetisierungs5-12 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen strom in der Hauptinduktivität, das Statordrehfeld und das Moment werden geschwächt. Das Kippmoment nimmt stärker ab. Die Nennleistung bleibt in diesem Bereich erreichbar. Bereich 3 mit starker Feldschwächung: Bei noch höherer Frequenz kommt das Kippmoment in die Nähe des erreichbaren Moments. Um ein Kippen zu verhindern, wird der Strom so abgesenkt, dass das Moment deutlich unter dem Kippmoment bleibt. Dadurch nimmt auch die Leistung ab. I1 U1 M PM Abbildung 5-21 Betriebskennlinien der U/f Steuerung (zu vervollständigen) Schlupfsteuerung: Um den Schlupf zu verändern, muss gemäss der Gleichung (5-29) der Rotorwiderstand vergrössert werden. Das ist mit einem Schleifringläufer mit externen, verstellbaren Widerständen möglich. Anstelle der Widerstände wird heute ein Stromrichter (Umrichter) eingesetzt. Er wirkt ähnlich wie ein stufenlos verstellbarer Widerstand, speist aber die bezogene Leistung zurück ins Netz. Der Stromrichter kann auch zusätzliche Leistung in den Rotor einspeisen und die Maschine übersynchron als Motor betreiben. Früher waren viele Asynchronmaschinen mit Schleifringläufer als drehzahlvariable Antriebe im Einsatz. Neue Maschinen werden selten bestellt. Änderung der Polpaarzahl: Das ist möglich bei einem Stator mit umschaltbarer Polpaarzahl und Kurzschlussläufer. Die Wicklungen können im Stillstand umgeschaltet werden. Dadurch können sie bei 2 verschiedenen Drehzahlen eingesetzt werden, die aber nicht veränderlich sind. Seltene Variante. 5.3 Sanftanlasser für Asynchronmaschinen 5.3.1 Einleitung Beim Einschalten einer Asynchronmaschine ist der Scheinwiderstand Ztot eines Stranges sehr klein. Der Einschaltstrom beträgt bei Direkteinschaltung das 6- bis 10-fache des Nennstroms und belastet das Netz. Zudem nimmt das Moment schlagartig zu, was die Asynchronmaschine und die Arbeitsmaschine (z. B. Pumpe) belastet. Es stehen 3 verlustarme Gegenmassnahmen zur Wahl: - Stern-Dreieck-Anlauf; Sanftanlasser; Umrichter. 5-13 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen Stern-Dreieck-Anlauf: Meistens werden die Asynchronmaschinen für Dreieckschaltung gebaut und im Klemmenkasten sind beide Wicklungsenden zugänglich (U1, U2, V1, V2, W1, W2). Das erlaubt, die Maschine zuerst in Sternschaltung mit verminderter Strang-Spannung anzufahren und anschliessend auf Dreieckschaltung umzuschalten (2-stufiger Anlauf). Bei der Sternschaltung mit gleichem Strangwiderstand Z nehmen Strangspannung und Strangstrom um den Faktor 3 ab, der Leiterstrom vermindert sich um den Faktor 3 gegenüber der Dreieckschaltung. Beim Ein- und Umschalten gibt es immer noch verkleinerte Strom- und Momentstösse auf Netz und Antrieb. direkt Y- Last Abbildung 5-22 Drehmoment T = f(n), Leiterstrom I = f(n) bei Stern-Dreieck-Anlauf (Nordqvist, 2004) Das Anlaufmoment ist noch ca. 25 % des Anlaufmoments bei Direkteinschaltung. Deshalb können nur Lasten mit kleinem Anlaufmoment angefahren werden, z. B. Förderbänder, Rolltreppen, Kompressoren, Pumpen, Lüfter. Sanftanlasser: Ein Sanftanlasser ist ein Phasenanschnitt-Stromrichter für Drehstrom, ein sog. Drehstromsteller. Er erhöht die Maschinenspannung stufenlos, indem er die positive und die negative Halbwelle der Sinusspannung verzögert einschaltet, „anschneidet“, ohne sie gleichzurichten. Die PhasenanschnittStromrichter wurden anfangs des 20. Jh. in Röhrentechnik (Quecksilberdampf) entwickelt. Sie verbreiteten sich stark nach der Erfindung des Thyristors, 1957. Umrichter: Ein Umrichter formt den Drehstrom des Netzes in einen frequenz- und spannungsvariablen Drehstrom um. Dadurch kann er die Asynchronmaschine vollständig drehzahlvariabel betreiben. Er wird bloss dann als Sanftanlasser eingesetzt, wenn die beiden anderen Varianten nicht genügen. 5-14 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen 5.3.2 Drehstromsteller-Typen Abbildung 5-23 Drehstromsteller kleiner (links), mittlerer (rechts) Leistung (www.abb.com) Es gibt 3 verschiedene Typen von Drehstromsteller-Schaltungen: - auf 3 Leiter wirkend (symmetrisch), sog. In-Line-Schaltung; auf 2 Leiter wirkend (asymmetrisch) , sog. In-Line-Schaltung; auf 3 Stränge einer Dreieckschaltung wirkend (symmetrisch), sog. Dreieck-Schaltung. a) b) DSS DSS Drehstromsteller (DSS) a) auf 3 oder 2 Leiter wirkend (In-Line-Schaltung) b) auf 3 Stränge einer Dreieckschaltung wirkend (Dreieckschaltung) Abbildung 5-24 Blockschema verschiedener Drehstromsteller-Typen (Nordqvist, 2004) Es wird der einfachste Fall näher betrachtet, der Drehstromsteller in Dreieckschaltung. Die Schaltung besteht aus 3 gleichen Teilschaltungen. Jede Teilschaltung umfasst ein Thyristorpaar und einen Strang der Asynchronmaschine. Sie heisst Wechselstromsteller mit RL-Last. Weil sie unabhängig von den anderen Teilschaltungen ist, kann sie einzeln betrachtet werden. 5-15 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen T1 IU U1 R IUV U2 UM UV T2 UUV L T3 V1 IV UWU IVW T4 UVW R L V2 UM VW T5 W1 IW IWU T6 Drehstromsteller Netz R L W2 UM WU Asynchronmaschine Abbildung 5-25 Prinzipschema Drehstromsteller in Dreieckschaltung 5.3.3 Drehstromsteller mit RL-Last Verhalten von Thyristoren: Die Thyristoren sind Halbleiter-Schalter. Bei negativer Spannung am Halbleiter sperren sie wie Dioden (Sperrbereich). Bei positiver Spannung am Halbleiter sperren sie weiterhin (Blockierbereich). Erst ein zusätzlicher Einschaltbefehl am Gate bringt den Halbleiter zum Leiten. Ein zu kleiner Strom (i < IH; Haltestrom) bringt den Halbleiter wieder zum Sperren. Normale Thyristoren können nicht mit einem Gateimpuls ausgeschaltet werden. I U Leiten I IH Ein Sperren Blockieren U Abbildung 5-26 Kennlinie Thyristor Schaltung Strang: Der Wechselstromsteller besteht nur aus 2 Thyristoren T1, T2 für positiven und negativen Strom. Er wandelt die Wechselspannung des Netzes am Eingang (Index E) mittels Phasenanschnitt in eine variable Wechselspannung am Ausgang (Index A) um, die kleiner als die Eingangsspannung ist. Bei kleinen Strömen können die beiden Thyristoren durch einen Triac ersetzt werden. 5-16 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen T1 I R UE T2 UA L Abbildung 5-27 Prinzipschema Wechselstromsteller mit RL-Last Anwendungen: - Helligkeitsverstellung bei Lampen (Dimmer), - Drehzahlverstellung bei Bohrmaschinen, Küchenmaschinen, Staubsauger (Universalmaschinen). Wirkungsweise Strang: Nach Beginn der positiven Spannungs-Halbwelle wird der Steuerwinkel < 180 ° abgewartet. Dann wird der Thyristor T1 mit einem Zündimpuls eingeschaltet. An der Last liegt nun die Spannung uE(t). Zu Beginn fliesst noch kein Strom, die ganze Spannung uE(t) liegt an der Induktivität. Gemäss der Differentialgleichung der Induktivität beginnt nun ein Strom zu fliessen. diL (t ) 1 uL (t ) dt L Differentialgleichung Induktivität L (5-32) Dadurch entsteht an R ein Spannungsabfall uR(t) und die Spulenspannung sinkt. Solange die Spannung an L positiv ist, steigt der Strom an, solange sie negativ ist, nimmt er ab. Sobald der Strom kleiner als der Haltestrom des Thyristors T1 ist, schaltet er ab. In der negativen Halbwelle geschieht dasselbe mit dem Thyristor T2. Bei > Z sinkt der Strom und damit die Wirkleistung in R ab. Weil der Netzstrom phasenverschoben und nicht sinusförmig ist, entstehen Netzrückwirkungen: Strom-Oberschwingungen, induktive Grundschwingungs-Blindleistung und Oberschwingungs-Blindleistung. Impuls T1 Impuls T2 uN uA iA uA/UN; iA/A 1 0.5 0 -0.5 -1 0 50 100 150 200 250 300 350 phi/° Abbildung 5-28 Ausgangsgrössen uA(t), iA(t) bei RL-Last; Steuerwinkel > Z. Für Steuerwinkel < Z läuft die Schaltung unregelmässig, weil der Thyristor teilweise nicht einschaltet (wegen negativer Spannung am Thyristor). Nur wenn die Zündimpulse wiederholt (sog. Impulsketten) oder verlängert werden (sog. Langimpulse), entsteht ein stationärer Betrieb. Wech- 5-17 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.3 Sanftanlasser für Asynchronmaschinen selstromsteller werden generell mit solchen Impulsen betrieben, meistens Impulsketten. Es stellt sich der Fall = Z ein. Wirkungsweise Drehstromsteller: Die 3 Wechselstromsteller werden 120 ° versetzt mit dem Steuerwinkel gesteuert. Zu Beginn wird ein hoher Steuerwinkel gewählt und eine Anfangsspannung von ca. 30 % der Nennspannung erzeugt. Während der Anlaufzeit wird der Steuerwinkel vermindert auf 0 ° und die Strangspannung UM der Asynchronmaschine rampenförmig auf die Leiterspannung UN erhöht. Bei Bedarf kann das berechnete Drehmoment anstatt der Spannung rampenförmig erhöht werden oder der Strom begrenzt werden. Nach dem Hochlauf kann ein paralleles Schütz eingeschaltet werden, das den Sanftanlasser ablöst und die Verluste verringert. Beim Auslauf kann der Sanftanlasser dasselbe in umgekehrter Reihenfolge wiederholen. Dadurch werden wie beim Anlauf Arbeitsmaschine und Anlage geschont (z. B. Pumpe, Förderband mit empfindlichen Gütern). UM UN Abbildung 5-29 Verlauf der Maschinenspannung bei Anfahrt und Auslauf (Nordqvist, 2004) Die im Bereich > entstehenden Netzrückwirkungen (Strom-Oberschwingungen, Oberschwingungs-Blindleistung) sind meistens problemlos, weil sie nur kurzzeitig auftreten. direkt Sanftanlasser Last Abbildung 5-30 Sanftanlasser: Drehmoment M = T = f(n), Leiterstrom I = f(n) (Nordqvist, 2004) Das Anlaufmoment ist etwas höher als bei Stern-Dreieckumschaltung. Es können aber immer noch nur Lasten mit verkleinertem Anlaufmoment angefahren werden, z. B. Förderbänder, Rolltreppen, Kompressoren, Pumpen, Lüfter. Falls ein höheres Moment nötig ist, kommen nur Direkteinschaltung oder Umrichter in Frage. 5-18 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter 5.4 Umrichter 5.4.1 Einleitung Drehzahlvariable Antriebe bestehen meist aus Umrichtern (UR) und Asynchronmaschinen (ASM). Abbildung 5-31 Pumpe mit Asynchronmaschine und aufgesetztem Umrichter Der Umrichter formt den Drehstrom des Netzes in einen frequenz- und spannungsvariablen Drehstrom um. Er steuert die Drehzahl der Asynchronmaschine mit der Statorfrequenz. Zusätzlich muss er die Spannung gemäss den Anforderungen der Asynchronmaschine verändern. Abbildung 5-32 Kennlinien Asynchronmaschine (Brosch, 2008) Anforderungen der Asynchronmaschine an den Umrichter: - Im gesamten Frequenzbereich muss der Maximalstrom des Umrichters geliefert werden können. 5-19 ZHAW / SoE Grundlagen Antriebstechnik - - 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Im Frequenzbereich 0 bis fN (entspricht Ankerstellbereich bei Gleichstrommaschine) müssen sich Frequenz und Statorspannung näherungsweise proportional verhalten. Das Drehfeld des Stators bleibt dadurch konstant und es kann das volle Drehmoment abgegeben werden. Im Frequenzbereich fN bis fmax (sog. Feldstellbereich) ist die Statorspannung U auf dem Nennwert und darf nicht mehr zunehmen. Das magnetische Feld und das Drehmoment schwächen sich ab. Es kann die Nennleistung abgegeben werden. 5.4.2 Aufbau, Eigenschaften Umrichter werden häufig als Frequenzumrichter bezeichnet. Umrichter für Asynchronmaschinen haben immer einen Spannungszwischenkreis (Kondensator) und können auch als U-Umrichter bezeichnet werden. Umrichter für Synchronmaschinen können auch einen Stromzwischenkreis haben (Spule; I-Umrichter). Hier wird nur der UUmrichter betrachtet. Steuerteil zum Leitsystem BedienPanel Controller zum Netz 3 = = Netzstromrichter Zwischenkreis 3 zur Maschine Maschinenstromrichter Leistungsteil Abbildung 5-33 Blockschema Umrichter mit Spannungszwischenkreis Leistungsteil: Der Netzstromrichter richtet die Netzspannung gleich. Der Zwischenkreis hat einen kleinen Energiespeicher in Form einer Kondensatorbatterie. Er wird gleichzeitig vom Netzstromrichter gefüllt und vom Maschinenstromrichter geleert. Der Maschinenstromrichter erzeugt eine Drehspannung mit variabler Frequenz und Amplitude. Dadurch kann er schnell und verlustarm die Asynchronmaschine gemäss ihrer Kennlinie steuern. Steuerteil: Der Steuerteil des Frequenzumrichters hat folgende 3 Aufgaben: - Kommunikation mit dem Leitsystem oder dem Bediener und mit dem Leistungsteil; - Steuerung oder Regelung von Drehzahl oder Drehmoment der Asynchronmaschine. - Überwachung von Leistungsteil und Steuerteil. Der Steuerteil empfängt die Drehzahl- oder Drehmoment-Sollwerte vom Leitsystem. Er erhält die Istwerte (Spannung, Strom, etc.) von den Sensoren im Leistungsteil. Mit Hilfe der programmierten Steuerung oder Regelung berechnet er die Ein- und Ausschalt-Befehle für die Halbleiter im Maschinenstromrichter. 5-20 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Steuerteil Energiespeicher Leistungsteil Abbildung 5-34 Ansicht Umrichter (www.siemens.com) Die Halbleiter werden bei kleineren Umrichtern in Modulen zusammengefasst: ein Modul für den Netzstromrichter, ein Modul für den Maschinenstromrichter. ① ① ② Abbildung 5-35 Halbleiter-Module ohne Kühler (1), Controller-Print (2) (www.abb.com) Vorteile: - hohe Regelgenauigkeit und kurze Reaktionszeit bei Lastsprüngen; - Anfahrt mit Volllast möglich; - verlustarm; bedeutende Energieeinsparung beim Ersatz einer verlustbehafteten Drehzahlverstellung (z. B. Drosselklappe für Flüssigkeitsströmung); - wartungsarm; Wartungseinsparung beim Ersatz eines drehzahlvariablen Gleichstromantriebs durch einen Antrieb mit Asynchronmaschine und Umrichter; - Steuerteil hat vorbereitete Programme für Hauptanwendungen (Applikationsmakros für Förderband etc.); - detaillierte Störungsmeldung von Umrichter und Maschine (Diagnose); - fernsteuerbar (Steuerteil hat Anschluss an Leitsystem). Nachteile: - erhöhte Netzbelastung durch nichtsinusförmige Ströme evtl. Filter oder besserer Netzstromrichter nötig; - erhöhte Belastung der Maschine durch nichtsinusförmige Spannungen. evtl. Filter oder entsprechend dimensionierte Maschine nötig. Zusammenfassung: Die Kombination Umrichter mit Asynchronmaschine ist ein hervorragender drehzahlvariabler Antrieb mit einem weiten Anwendungsbereich. 5-21 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter 5.4.3 Netzstromrichter für Wechselstrom Bei einem Wechselstromnetz (Bahn) oder bei kleinen Leistungen ist der Netzstromrichter (NSR) für Wechselstrom gebaut. Es wird zuerst diese einfachere Variante des Netzstromrichters betrachtet. Ersatzschaltung: Ein einfacher Netzstromrichter besteht aus einer Dioden-Brückenschaltung. Die Glättungselemente kleine Spule und Kondensator (Energiespeicher) werden durch eine grosse Spule ersetzt. Der Maschinenstromrichter verbraucht Wirkleistung. Er wird durch den Widerstand R ersetzt. Ohne Glättungsspule würde der Kondensator hohe Netzstromspitzen erzeugen, was unerwünscht ist. Bei Bedarf kann die Netzspannung über einen Transformator reduziert werden: z. B. bei hoher Netzspannung (Bahn) oder tiefer Zwischenkreis-Spannung (unterbrechungsfreie Stromversorgung USV). K D1 IN D3 id(t) Id A R ud(t) Udi UN L uZK(t) UZK K D2 D4 A Indizes: N Netzseite d DC-Seite i ideell A Anode K Kathode ZK Zwischenkreis Abbildung 5-36 Ersatzschaltung Netzstromrichter für Wechselstrom Wirkungsweise: Bei kathodenseitig parallelgeschalteten Dioden (D1, D3) leitet diejenige mit dem höheren Anodenpotential. Bei anodenseitig parallelgeschalteten Dioden (D2, D4) leitet diejenige mit dem tieferen Kathodenpotential. Folglich werden in der ersten Halbwelle die Dioden D1 und D4 leitend, in der zweiten Halbwelle D3 und D2. Es entsteht am Ausgang eine stark wellige Gleichspannung ud(t). Die Spule sorgt für einen näherungsweise konstanten Strom. Er führt am Widerstand zu einer näherungsweise konstanten Spannung. Der einfache Netzstromrichter kann nur im Gleichrichterbetrieb arbeiten. Die Schaltung wird als B2U bezeichnet: B: Brückenschaltung; 2: 2 Pulse pro Netzperiode; U: ungesteuert (die Dioden können nicht gesteuert werden). Der Netzstrom hat keine Phasenverschiebung zur Netzspannung und ist nicht sinusförmig. Er besteht aus einer sinusförmigen Grundschwingung (Index 1) und Oberschwingungen. Die Stromoberschwingungen müssen bei grösseren Leistungen gefiltert werden (unerwünschte Netzrückwirkungen). - weitere Anwendungen der B2-Schaltung: - Netzteil, DC-Speisegerät, - drehzahlvariabler Gleichstromantrieb (zusammen mit Gleichstromsteller und Gleichstrommaschine). 5-22 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Abbildung 5-37 Ein-, Ausgangsgrössen B2U-Schaltung mit Glättung und R-Last Berechnung: Annahmen Die Halbleiterverluste sind vernachlässigbar. Keine Spannungsabfälle im Durchlassbetrieb. Die Glättung ist ideal. Der Strom lückt nicht. In Wirklichkeit ist die Glättung nicht ideal: Die Glättungselemente L, C werden aus Kostengründen möglichst klein gewählt. Deshalb sind die Ströme welliger als hier betrachtet (vgl. Praktikum). kB 2 U di 2 2 UN Gleichrichtfaktor (5-33) ideelle Gleichspannung (5-34) Gleichstrom (5-35) Gleichstromleistung (5-36) Wirkungsgrad NSR (bei grösseren Anlagen) (5-37) Wechselstrom (5-38) Grundschwingungsgehalt Strom (aus Fourieranalyse) (5-39) SN U N I N Eingangsscheinleistung (5-40) PN S N N Pd Eingangswirkleistung (5-41) QN Eingangsblindleistung (5-42) Phasenverschiebung Netzseite (5-43) Leistungsfaktor Netzseite (5-44) U di U ZK I d I ZK 1 T ud (t ) dt k B 2 U N T 0 U di PZK R U di Pd PZK R I d eff 2 U di I d NSR Pd 99 % PN I N Id gI I N1 2 2 IN S N 2 PN 2 N 0 N PN 2 2 g I cos( N ) SN 5-23 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter 5.4.4 Netzstromrichter für Drehstrom Ersatzschaltung: Ein einfacher Netzstromrichter (NSR) besteht aus einer Drehstrom-Brückenschaltung mit Dioden. Die Glättungselemente kleine Spule und Kondensator (Energiespeicher) werden wieder durch eine grosse Spule ersetzt und der Maschinenstromrichter durch den Widerstand R. Wenn die Schaltung aus Thyristoren anstatt Dioden besteht, kann die Gleichspannung stufenlos verändert werden (Phasenanschnitt-Technik). + u+N(t) K D1 U1N U2N U3N 1 2 3 D3 D5 id(t) Id L A I1 ud(t) Udi I2 I3 R uZK(t) UZK K N u-N(t) D2 A _ D4 D6 Abbildung 5-38 Ersatzschaltung NSR ud(t) = u+N(t) – u-N(t) gleichgerichtete Spannung (5-45) Wirkungsweise: Es werden zuerst die Sternspannungen u1N(t), u2N(t), u3N(t) betrachtet. Bei kathodenseitig parallelgeschalteten Dioden (D1, D3, D5) leitet diejenige mit dem höheren Anodenpotential. Folglich leiten - im Bereich T/12 t < 5T/12 die Diode D1, - im Bereich 5T/12 t < 9T/12 die Diode D3, - im Bereich 9T/12 t < 13T/12 die Diode D5. Bei anodenseitig parallelgeschalteten Dioden (D2, D4, D6) leitet diejenige mit dem tieferen Kathodenpotential. Folglich leiten - im Bereich 3T/12 t < 7T/12 die Diode D6, - im Bereich 7T/12 t < 11T/12 die Diode D2, - im Bereich 11T/12 t < 15T/12 die Diode D4. Jede der 6 Dioden hat die Leitdauer 120 °. Die Dioden D1, D3, D5 leiten um 60 ° versetzt gegenüber den Dioden D2, D4, D6. Dadurch findet immer nach 60 ° eine Kommutierung statt. Die beiden Teilspannungen u+N(t), u-N(t) bilden gemäss der Maschengleichung die noch leicht wellige Gleichspannung ud(t). Die Glättungsspule sorgt für einen näherungsweise konstanten Gleichstrom id(t). Er führt am Ersatzwiderstand R zu einer näherungsweise konstanten Zwischenkreisspannung uZK(t). Der einfache Netzstromrichter kann nur im Gleichrichterbetrieb arbeiten. Die Schaltung wird als B6U bezeichnet: - B: Brückenschaltung; - 6: 6 Pulse pro Netzperiode; - U: ungesteuert (die Dioden können nicht gesteuert werden). Bremsbetrieb: Soll im Bremsbetrieb die Leistung auch von der Asynchronmaschine ins Netz zurückfliessen können, muss ein rückspeisefähiger Netzstromrichter verwendet werden (gesteuerte B6-Schaltung oder Pulsstromrichter). Oder die Energie wird durch einen Gleichstromsteller mit Bremswiderstand im Zwischenkreis verheizt. 5-24 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter weitere Anwendungen B6-Schaltung: - mit Dioden: Gleichrichter für DC-Netz (Tram, Trolleybus), - mit Thyristoren: Erregung von Synchronmaschinen, Ladegerät grosser Akkumulatoren, Hochspannungs-Gleichstrom-Übertragung (HGÜ). Abbildung 5-39 Ein-, Ausgangsgrössen B6U-Schaltung mit Glättung und R-Last Berechnung: Annahmen: Die Halbleiterverluste sind vernachlässigbar. Die Glättung ist ideal. kB6 U di 3 2 UN U di U ZK I d I ZK 1 T ud (t ) dt k B 6 U N T 0 U di R 5-25 Gleichrichtfaktor (5-46) ideelle Gleichspannung (5-47) Lade- und Entladestrom Zwischenkreis (5-48) ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Pd PZK R I deff 2 U di I d Gleichstromleistung (5-49) NSR Pd 99 % PN Wirkungsgrad NSR (bei grösseren Anlagen) (5-50) IN 2 Id 3 Leiterstrom (5-51) gI I N1 3 IN Grundschwingungsgehalt Strom (aus Fourieranalyse) (5-52) SN 3 U N I N Eingangsscheinleistung (5-53) PN S N N Pd Eingangswirkleistung (5-54) QN Eingangsblindleistung (5-55) Phasenverschiebung Netzseite (5-56) Leistungsfaktor Netzseite (5-57) S N 2 PN 2 N 0 N PN 3 g I cos( N ) SN Nur die Grundschwingung des Netzstromes trägt zur Wirkleistung bei. Die Oberschwingungen erhöhen den Effektivwert. Sie bewirken Oberschwingungsblindleistung, erhöhen damit die Scheinleistung und vermindern den Leistungsfaktor am Netz. Die höhere Pulszahl der B6-Schaltung verglichen mit der B2-Schaltung hat folgende Vorteile: - Gleichspannung: höhere Frequenz des Spannungsrippels (6-fache Netzfrequenz statt 2-fache) braucht weniger Glättung. - Netzstrom: weniger Oberschwingungen, höherer Grundschwingungsgehalt, besserer Leistungsfaktor braucht weniger Filter. 5.4.5 Zwischenkreis Wirkungsweise: Der Zwischenkreis besteht aus einer kleinen Glättungsdrossel und einer Kondensatorbatterie (Energiespeicher). Die Zwischenkreisspannung ist praktisch konstant. Der Maschinenstromrichter bezieht einen Entladestrom aus dem Zwischenkreis. Sein Mittelwert hängt nur von der Wirkleistung der Asynchronmaschine ab. Der Netzstromrichter liefert den entsprechenden Ladestrom des Zwischenkreises. Der Energiespeicher gleicht kurzfristige Stromunterschiede von Netzstromrichter und Maschinenstromrichter aus. Blindleistung der Asynchronmaschine: Die Blindleistung pBlind Strang(t) eines Strangs ist sinusförmig. Die Blindleistung aller 3 Stränge zusammen ergibt 0. Der Austausch unter den Strängen erfolgt über den Zwischenkreisanschluss des Maschinenstromrichters (ohne C!). 5-26 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter 5.4.6 Pulsstromrichter für Wechselstrom Der Maschinenstromrichter (MSR) ist ein Pulsstromrichter (PSR) für Drehstrom. Ein Pulsstromrichter bildet mittels Pulsen die gewünschte Spannungsform. Um seine Wirkungsweise besser zu verstehen, wird zuerst der einfachere Pulsstromrichter für Wechselstrom betrachtet. Ersatzschaltung: Die Schaltung des Wechselstrom-Pulsstromrichters ist identisch mit der Schaltung des 4Quadranten-Gleichstromstellers. Nur die Steuerung ist unterschiedlich. Der Netzstromrichter mit Zwischenkreis liefert die Gleichspannung Ud und wird durch eine Gleichspannungsquelle ersetzt. Die Transistoren T1, T2 bilden mit den Dioden D1, D2 den Umschalter S1 (orange). Er kann die Ausgangsklemme 1 mit dem Pluspol oder mit dem Minuspol der Gleichspannung Ud verbinden. Der Umschalter S2 (bestehend aus T3, T4, D3, D4; grün) kann dasselbe mit der Ausgangsklemme 2 tun. Als Last wird eine RL-Schaltung betrachtet. + id(t) Id T1 D2 iV(t) IV Ud = UZK L D1 D4 T4 D3 R 1 T2 T3 2 uV(t) UV - Abbildung 5-40 Ersatzschaltung Wechselstrom-Pulsstromrichter mit RL-Last Abbildung 5-41 vereinfachte Ersatzschaltung Wechselstrom-Pulsstromrichter Wirkungsweise: Die beiden Umschalter S1, S2 können nur 3 Spannungen an die Last geben: + Ud, 0, - Ud. Damit kann eine nicht sinusförmige Wechselspannung erzeugt werden. Sie besteht aus Pulsen fester Höhe und frei wählbarer Breite. Die Breite wird so moduliert, dass eine sinusförmige Grundschwingung mit der gewünschten Frequenz und Amplitude entsteht. Die Induktivität wirkt als kurzfristiger Energiespeicher und glättet den Strom. Die Wechselspannung uV(t) ist nicht sinusförmig. Sie besteht aus einer Grundschwingung (Index 1) und Oberschwingungen. Die Spannungsoberschwingungen können bei Bedarf weggefiltert werden (unterbrechungsfreien Stromversorgung; USV). Der Wechselstrom iV(t) ist dank der Spule fast sinusförmig. 5-27 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Abbildung 5-42 Ein-, Ausgangsgrössen PSR für 6 Pulse pro Wechselspannungsperiode (zu vervollständigen) Modulationsverfahren: - Pulsbreiten-Modulation (PWM): Tein variabel, T konstant. Die Schaltung arbeitet mit einer festen Schaltfrequenz. Diese Variante wird zusammen mit einem Sinusfilter verwendet, das die Schaltfrequenz aus der Ausgangsspannung herausfiltert (z. B. bei einer USV). - Pulsfrequenz-Modulation: Tein konstant, T variabel. Die Schaltung arbeitet mit einer festen Einschaltdauer Tein. Diese Variante kommt nur in Spezialfällen vor (bei minimaler Pulsdauer). - 2-Punkt-Regelung: Tein variabel, T variabel. Die Schaltung arbeitet mit einem Toleranzband um den Sollwert des Stromes. Wird der obere Rand des Toleranzbandes erreicht, wird ausgeschaltet, wird der untere Rand erreicht, wird eingeschaltet. Diese Variante kommt häufig vor. Änderung von Frequenz und Amplitude der Spannungsgrundschwingung uV1(t) mit PWM: Die Frequenz wird eingestellt, indem mehr oder weniger Pulse pro Grundschwingung erzeugt werden. Die Amplitude kann durch die Breite der Pulse verändert werden. Weitere Anwendungen: - Fotovoltaik-Wechselrichter, - Netzstromrichter, falls Rückspeisung gefordert (z. B. Netzkopplung Landesnetz - Bahnnetz; Eisenbahnantrieb). 5-28 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Abbildung 5-43 PSR; Veränderung von Frequenz und Amplitude der Grundschwingung (Brosch, 2008) 5.4.7 Maschinenstromrichter: Pulsstromrichter für Drehstrom Ersatzschaltung: Der Netzstromrichter mit Zwischenkreis liefert die Gleichspannung Ud und wird durch eine Gleichspannungsquelle ersetzt. Ein Pulsstromrichter (PSR) für Drehstrom arbeitet als Maschinenstromrichter (MSR). Er besteht aus 6 Transistoren und 6 Dioden. Ein Transistor bildet mit seiner parallel geschalteten Diode zusammen einen Schalter. 2 übereinander gezeichnete Schalter zusammen bilden einen Umschalter (farbig). Ein Umschalter kann eine Ausgangsklemme (U, V, W) mit dem Pluspol oder mit dem Minuspol der Gleichspannung Ud verbinden. Die Stränge der Asynchronmaschine werden durch RL-Schaltungen (Z) ersetzt. Die Stränge können im Stern oder im Dreieck geschaltet werden. + id(t) Id IU U UUS UUV Ud Z IV V S UVW W UWU UVS UWS IW - Abbildung 5-44 Ersatzschaltung MSR und ASM Wirkungsweise: Die 3 Umschalter werden so gesteuert, dass die Leiterspannungen uUV(t), uVW(t), uWU(t) ein Drehstromsystem bilden: 3 um 120 ° versetzte Drehspannungen. Der Maschinenstromrichter kann nur Frequenz und Amplitude der Spannungsgrundschwingung direkt beeinflussen. Damit regelt er indirekt die Drehzahl oder das Drehmoment der Asynchronmaschine. 5-29 ZHAW / SoE Grundlagen Antriebstechnik + 5. Antriebe mit Asynchronmaschine 5.4 Umrichter id(t) Id IU U S1 Ud/2 UUV 0 V UUS S S2 UVW Ud/2 S3 W Z IV UWU UWS UVS IW - Abbildung 5-45 vereinfachte Ersatzschaltung MSR und ASM Bei der Dreieckschaltung der Asynchronmaschine sehen die Strangspannungen uUV(t), uVW(t), uWU(t) gleich aus wie beim Wechselstrom-Pulsstromrichter. Die Pulse haben die Amplitude + Ud oder - Ud. Abbildung 5-46 PSR mit ASM, Dreieckschaltung; Strangspannung, -Strom; f = 25 Hz Bei der Sternschaltung der Asynchronmaschine ist die eine Seite eines Stranges direkt mit einer Ausgangsklemme verbunden. Die andere Seite eines Strangs wird über den Sternpunkt S durch die anderen Stränge beeinflusst. Deshalb entstehen an einem Strang mehr als bloss 2 verschiedene Pulsamplituden. Sie können bestimmt werden, indem die verschiedenen Schalterstellungen betrachtet werden. Für die Strangspannung uUS(t) sind folgende Pulsamplituden möglich: Klemme U Klemme V Klemme W - + - + - + + - + + + + + uUS(t) = f(Ud) Die Betrachtung gilt auch für die anderen Strangspannungen. Dadurch entstehen feiner pulsierende Strangspannungen. 5-30 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter 0.5 0 -0.5 Abbildung 5-47 PSR mit ASM, Sternschaltung; Strangspannung mit Grundschwingung Realisierung Pulsbreitenmodulation: Um die Schaltzeitpunkte des Umschalters S1 zu bestimmen, wird eine sinusförmige Modulationsfunktion mU(t) mit einem höherfrequenten Dreiecksignal s(t) verglichen. Ist die Sinusfunktion grösser als das Dreiecksignal, wird der Pluspol von Ud an die Ausgangsklemme U geschaltet. Ist sie kleiner, wird der Minuspol von Ud an die Ausgangsklemme U geschaltet. Zwischen der Klemme U und dem Mittelpunkt des Zwischenkreises (Klemme 0) entsteht die gepulste Spannung uU0(t). Die Umschalter S2, S3 werden analog gesteuert durch Vergleich von mV(t) bzw. mW(t) mit s(t). Es entstehen uV0(t), uW0(t) und die Leiterspannungen uUV(t), uVW(t), uWU(t) (Abbildung 5-48). 𝑀 Modulationsgrad 𝑓1 Modulationsfrequenz, Grundschwingung (5-59) 𝑚𝑈 (𝑡) = 𝑀 cos(2𝑓1 𝑡) Modulationsfunktion Phase U (5-60) 𝑚𝑉 (𝑡) = 𝑀 cos(2𝑓1 𝑡 − 2/3) Modulationsfunktion Phase V (5-61) 𝑓𝑃 = 𝑇 ≫ 𝑓1 Dreiecksfrequenz, Pulsfrequenz (5-62) 𝑢𝑈𝑉 (𝑡) = 𝑢𝑈0 (𝑡)−𝑢𝑉0 (𝑡) gepulste Leiterspannung UV (5-63) 1 𝑃 Abbildung 5-48 links: Modulation mit Grundschwingung rechts: Modulation mit Grund- und 3. Oberschwingung 5-31 (5-58) ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Die Grundschwingung UM1 der Leiterspannung an der Maschine kann mittels Fourieranalyse berechnet werden. Sie soll zwischen 0 und UN proportional zur Frequenz f1 verändert werden können. Beim Modulationsgrad M = 1 wird jedoch noch nicht der Wert der Netzspannung UN erreicht. √3 𝑈𝑀1 = 𝑀 2√2 𝑈𝑑 = 𝑀 𝑈𝑀1 = 3√3 2 3√3 2 𝑈𝑁 𝑈𝑁 = 0.8270𝑈𝑁 Grundschwingung bei M Mlin max (5-64) Grundschwingung bei M = 1 (5-65) Wird der Modulationsgrad über 1 erhöht, entstehen überbreite Pulse und tiefere Oberschwingungsfrequenzen, was unerwünscht ist. Das kann in einem gewissen Bereich verhindert werden, indem der Modulationsfunktion etwas 3. Oberschwingung beigemischt wird. Dadurch entstehen einerseits mehr breite Pulse, was die Grundschwingungsspannung erhöht. Anderseits verschwindet die 3. Oberschwingung in der Leiterspannung wegen der Differenzbildung (und in der Sternspannung bei floatendem Sternpunkt; Abbildung 5-48). Beim Wert Mlin max erreicht die Grundschwingung UM1 das Maximum des linearen Bereichs. Sie kommt nun in die Nähe der Netzspannung UN. Erst bei leichter Übermodulation mit dem Wert Mmax wird die Spannung UN erreicht. 1 𝑚𝑈 (𝑡) = 𝑀 [sin(2𝑓1 𝑡) + 6 sin(2𝑓3 𝑡)] 3 erweiterte Modulationsfunktion U 𝑈𝑀1 = 𝑈𝑁 = 0.9549𝑈𝑁 Grundschwingung bei Mlin max = 𝑀𝑚𝑎𝑥 = 1.369 Modulationswert für UN 2 √3 (5-66) (5-67) (5-68) Im Spektrum der Leiterspannung ist die Grundschwingung gut sichtbar. Die Rechteckpulse führen zu Amplitudengruppen bei der Pulsfrequenz und mehrfacher Pulsfrequenz. Bei Übermodulation entstehen niederfrequente Oberschwingungen (Abbildung 5-49). Abbildung 5-49 Spektrum Leiterspannung bei erweiterter Modulationsfunktion Somit kann nun die Anforderung der Asynchronmaschine erfüllt werden, die Grundschwingungsspannung UM1 im Frequenzbereich 0 < f fNenn weitgehend proportional zur Frequenz zu verändern und im Bereich f > fNenn auf dem Wert UMNenn konstant zu halten (Abbildung 5-32). Der Grundschwingungsgehalt gU steigt nichtlinear mit zunehmender Grundschwingungsspannung. Der Modulationsgrad M ist linear zur Grundschwingungsspannung, solange keine Übermodulation auftritt (Abbildung 5-50). 5-32 ZHAW / SoE Grundlagen Antriebstechnik Abbildung 5-50 5. Antriebe mit Asynchronmaschine 5.4 Umrichter Grundschwingungsgehalt gU und Modulationsgrad M Berechnung PSR im Wechselrichterbetrieb (ASM im Motorbetrieb): Näherungen Maschinengrössen: Der Strom iM(t) wird sinusförmig angenommen. Grundschwingungsgehalt gU und Effektivwert UM der Spannung uM(t) sind nicht sinusförmig und werden näherungsweise berechnet. Grundschwingungsgehalt Spannung (aus Fourieranalyse; Näherung) (5-69) Spannung Maschine (5-70) Strom Maschine (-, Y-Schaltung) (5-71) SM 3 U M I M Scheinleistung (5-72) SM 1 3 U M 1 I M gU SM Grundschwingungs-Scheinleistung (5-73) PM SM M SM 1 cos M 1 Wirkleistung (5-74) QM Blindleistung (5-75) Phasenverschiebung Grundschwingung (5-76) Leistungsfaktor (5-77) Verschiebungsfaktor (5-78) Wirkungsgrad PSR (bei grösseren Anlagen) (5-79) 𝑔𝑈 = 𝑈𝑀1 𝑈𝑀 𝑈 0.91√ 𝑈𝑀1 𝑁 1 T U 2 uM (t ) dt M 1 T 0 gU UM IM UM1 ; Z IM U MY 1 ZY SM 2 PM 2 M 1 M PM gU cos M 1 SM cos M 1 PSR PM SM 1 PM 98 % Pd 5-33 ZHAW / SoE Grundlagen Antriebstechnik Pd PZK PM PSR 5. Antriebe mit Asynchronmaschine 5.5 Literaturverzeichnis PM Gleichstromleistung (5-80) Nur die Grundschwingung der Maschinenspannung trägt zur Wirkleistung bei. Die Oberschwingungen erhöhen den Effektivwert. Sie bewirken Oberschwingungsblindleistung, erhöhen damit die Scheinleistung und vermindern den Leistungsfaktor. Die Oberschwingungen führen auch zu zusätzlichen Verlusten von ca. 1 % der Maschinen-Nennleistung. Das Geräusch der Asynchronmaschine. wird ebenfalls beeinflusst, sie tönt schärfer (vgl. Anfahrgeräusch S-Bahn). Weitere Anwendungen: - dynamische Blindleistungskompensation, - Kompensation von Asymmetrien im Drehstromnetz - aktives Netzfilter, das Oberschwingungen auslöscht. 5.5 Literaturverzeichnis Brosch, Peter. 2008. Moderne Stromrichterantriebe. s.l. : Vogel, 2008. Colotti, Alberto. 2012. Leistungselektronik und Antriebe. Winterthur : zhaw, 2012. Fischer, Rolf. 2006. Elektrische Maschinen. München : Hanser, 2006. Nordqvist, Kässer. 2004. Sanftanlasser Handbuch. s.l. : ABB STOTZ-KONTAKT GmbH, 2004. 5-34 ZHAW / SoE Grundlagen Antriebstechnik 5. Antriebe mit Asynchronmaschine 5.5 Literaturverzeichnis Netzstromrichter Zwischenkreis id(t) Id L IU Maschinenstromrichter U U S1 UUV ud(t) Ud V UU V S2 W UVW C 500 uUV iUV 500 ud/V; id/A 0 uUV/V; iUV/A uU iU 200 uU/V; iU/A W S3 N UWU 0 0 -200 0 uN(t) iN(t) gI = IN1 / IN = 3 / SN = 3UNIN PN = NSN N = gIcos N1 Abbildung 5-51 0.01 0.02 t/s 0.03 0.04 ud id -500 0 sinusförmig nicht sinusförmig Grundschwingungsgehalt ud(t) ode id(t) Leistungsfaktor Pd = UdId Umrichter, Übersicht 5-35 0.02 t/s 0.04 6 Pulse pro Netzperikonstant -500 0 0.01 0.02 0.03 0.04 0.05 t/s uM(t) iM(t) gU= UM1 / UM SM = 3UMIM PM = MSM M = gUcos M1 nicht sinusförmig näherungsweise sinusförmig Grundschwingungsgehalt Leistungsfaktor