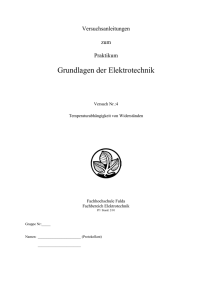
Passive Bauelemente
Werbung

2 Passive Bauelemente Ekbert Hering und Klaus Bressler 2.1 Elektronische Bauelemente 2.1.1 Übersicht Die Elektronik befasst sich mit den Vorgängen der Bewegung elektrischer Ladungsträger (meist Elektronen) in Festkörpern, Flüssigkeiten und Gasen (zur Halbleiterphysik, s. Abschn. 1.8). Der Begriff Bauelement ist in DIN 40 150 festgelegt und ist demnach hinsichtlich der Datenangaben, der Prüfung, der Anwendung und der Instandsetzbarkeit die kleinste, nicht weiter zerlegbare Einheit in der Elektronik (z. B. Widerstände, Kondensatoren, monolithische IC, engl.: Integrated Circuits). Die weiteren Begriffsbestimmungen nach DIN 40 150 und ihre Zusammenhänge zeigt Abb. 2.1. Wie Abb. 2.1 zeigt, bestehen Bauteile aus einzelnen Bauelementen und Baugruppen (z. B. ein Netzteil) aus mehreren Bauteilen und Bauelementen. Geräte (z. B. Oszilloskope) sind aus Baugruppen, Bauteilen und Bauelementen zusammengesetzt. In Anlagen (z. B. ein Computer) befinden sich Geräte, Baugruppen, Bauteile und Bauelemente. Elektronische Bauelemente haben die Aufgabe, elektrische Signale zu erzeugen oder zu wandeln. Sie spielen auch in der Datentechnik eine wichtige Rolle. Üblicherweise werden sie E. Hering () E-Mail: [email protected] K. Bressler E-Mail: [email protected] in passive und aktive Bauelemente eingeteilt (Abb. 2.2). Passive Bauelemente erhalten nur eine Signalgröße, wobei meistens mit einer Spannung ein entsprechender Strom erzeugt wird oder umgekehrt. Aktive Bauelemente erhalten dagegen eine Signalgröße und eine Hilfsenergie (Stromversorgung), wobei die Signalgröße am Eingang jenen Anteil der Hilfsenergie steuert, der zum Ausgang fließt. Aktive Bauelemente können deshalb verstärken und schwingen. Zu den passiven Bauelementen gehören der Widerstand (R), der Kondensator (C ), die Spule (L) und die Diode (D), zu den aktiven der Transistor (T ), der Thyristor, integrierte Schaltungen und sonstige Bauelemente. Die weitere Unterteilung zeigt Abb. 2.2. 2.1.2 Anforderungen und Anwendungsklassen Je nach Einsatzgebiet sind an elektronische Bauelemente folgende unterschiedliche Anforderungen zu stellen: Elektrische Sicherheit (VDE-Vorschriften), maximale elektrische Belastbarkeit (Spannung, Strom, Leistung, Kurven- bzw. Impulsform, Frequenzbereich), Umgebungstemperatur Insbesondere bei Halbleiterbauelementen unterscheidet man folgende Bereiche: – Industrieller Bereich (0 °C bis C70 °C), – erweiterter industrieller Bereich (25 °C bis C85 °C) und, – militärischer Bereich (55 °C bis C125 °C); © Springer-Verlag GmbH Deutschland 2017 E. Hering, K. Bressler, J. Gutekunst (Hrsg.), Elektronik für Ingenieure und Naturwissenschaftler, DOI 10.1007/978-3-662-54214-9_2 95 96 E. Hering und K. Bressler Temperaturkoeffizient, Langzeitstabilität der elektrischen Kennwerte (Alterung), Feuchtigkeit, Staub, Einstrahlung, maximale Beschleunigung und Schwingungsfrequenz, Qualität, Lebensdauer, Größe und Gewicht und Preis. Welchen Einflüssen man ein Bauelement aussetzen darf, ohne dass sich seine elektrischen Kenndaten in unzulässiger Weise ändern (Änderungs- Abb. 2.1 Begriffsbestimmungen für Baueinheiten nach DIN 40 150 fall) oder gar ein Totalausfall eintritt, wird in DIN 40 040 durch Anwendungsklassen beschrieben. Eine zu große Abweichung der elektrischen Lösung Kenndaten bezeichnet man als Änderungsausfall. Die Anwendungsklassen werden durch BuchstaG Untere Grenztemperatur 40 °C. ben gekennzeichnet und sind für alle elektroniP Obere Grenztemperatur C85 °C. schen Bauelemente gültig. Die einzelnen KennG Zulässige Feuchtebeanspruchung: buchstaben, von denen man in der Regel nur die Höchstwert: 85 %, jedoch nur 60 Tage im Jahr, ersten drei nennt, haben folgende Bedeutung: im übrigen 75 % Bezeichnung der klimatischen Anwendungsklasse: 1. Kennbuchstabe Untere Grenztemperatur in °C. 2. Kennbuchstabe Obere Grenztemperatur in °C. 3. Kennbuchstabe Zulässige Feuchtebeanspruchung. Angaben zur Zuverlässigkeit: 4. Kennbuchstabe Ausfallquotient (Anteil ausfallender Bauteile in einer gegebenen Zeit). 5. Kennbuchstabe Beanspruchungsdauer. Mechanische Anwendungsklasse: 6. Kennbuchstabe Mechanische Beanspruchung. 7. Kennbuchstabe Luftdruck. 8. Kennbuchstabe Klimatische Sonderbeanspruchung (Wasser, Luft, Staub, Sandsturm, Schimmel, Termiten, Sonnenbestrahlung, Höheneinsatz). Jahresmittel: 65 %. Keine Betauung. Q Ausfallquotient beträgt 30 106 h1 R Beanspruchungsdauer von 100.000 h. W Mechanische Beanspruchung: Schwingen: 10 Hz bis 55 Hz mit 20 m=s2 ; Schock: 150 m=s2 für 11 ms. Z Luftdruck ist dem Datenblatt zu entnehmen. Z Sonderbeanspruchung ist dem Datenblatt zu entnehmen. 2.1.3 Zuverlässigkeit Die Zuverlässigkeit ist ein Maßstab für die Eignung eines Bauelementes, bei einer gegebenen Belastung innerhalb eines bestimmten Zeitraums voraussichtlich fehlerfrei zu arbeiten. Von elektronischen Geräten, beispielsweise in industriellen Fertigungsprozessen oder im medizinischen Bereich, wird eine hohe Betriebszuverlässigkeit erwartet. Ein Geräteausfall, sei Beispiel 2.1-1 es durch Überbelastung oder durch Erreichen der Ein Bauelement trägt die Kennzeichnung Lebensdauer, hat im Fertigungsbetrieb einen ProGPGQRWZZ. Für welche Anwendungen ist duktionsausfall oder -ausschuss zur Folge, was es geeignet? erhebliche Kosten verursacht; im medizinischen 2 Passive Bauelemente 97 Abb. 2.2 Einteilung der Bauelemente Abbildung 2.3 zeigt, dass eine Erhöhung der Zuverlässigkeit zwar die Betriebskosten sinken lässt, aber die Herstellungskosten der Bauelemente sehr stark ansteigen. Deshalb nehmen zwar die Kosten mit zunehmender Zuverlässigkeit zunächst ab, steigen aber mit höheren Anforderungen überproportional an. Es wird zwischen einem Änderungsausfall und einem Totalausfall unterschieden. Abb. 2.3 Kosten in Abhängigkeit von der Zuverlässigkeit Bereich können sogar Menschenleben gefährdet sein. Aus diesem Grunde ist die Auswahl der richtigen Bauelemente und ihre geeignete Beschaltung sehr wichtig. Die Erhöhung der Zuverlässigkeit eines Bauelementes kostet aber ihren Preis (Abb. 2.3). 2.1.3.1 Ursachen eines Ausfalls Außer den bereits bei der Herstellung entstandenen Fehlern, die sich häufig erst im Laufe der Zeit auswirken, kommen als Ausfallursachen in Frage: Fertigungsfehler bei einem Bauteil („angetötetes“ Bauteil), Überbeanspruchung des Bauelements beim Einbau (z. B. zu hohe Temperaturen beim Lö- 98 ten oder zu hohe mechanische Beanspruchung beim Abbiegen der Anschlüsse); Überbelastung (elektrisch oder thermisch) während des Betriebes; Ende der Lebensdauer. Hierüber ist meistens keine direkte Aussage möglich, da die Lebensdauer vor allem von der elektrischen, mechanischen und klimatischen Belastung im Betrieb abhängt; Beschädigungen infolge zu hoher elektrostatischer Entladungen (ESD; engl.: Electrostatic Discharge). Bei allen modernen Halbleitern (außer bipolaren Leistungstransistoren) besteht die Gefahr, dass isolierende Siliciumschichten und Sperrschichten durch statische Aufladungen beschädigt oder durchschlagen werden. Deshalb sind folgende Vorsichtsmaßnahmen erforderlich (s. auch Abschn. 3.5.7): – Transport in antistatischer, d. h. hochohmig leitender Verpackung. – Lötkolben werden geerdet, und die Bedienungsperson ist über ein hochohmiges Armband geerdet. – Arbeitsplatz mit antistatischem Belag, geerdete Kupfernetze unter dem hochohmig leitenden Kunststofffußbodenbelag, hochohmig geerdete Stühle und Polster. – Arbeitsschuhe mit leitfähiger Sohle. E. Hering und K. Bressler Abb. 2.4 Ausfallrate im Verlauf der Einsatzzeit elementen ist durchschnittlich jede Stunde mit einem Ausfall zu rechnen. Früh- und Verschleißausfälle Die Ausfallrate ist häufig innerhalb der Lebensdauer nicht gleichbleibend. Abbildung 2.4 zeigt die typische, sogenannte Badewannenkurve, d. h. die Ausfallrate ist bei Einsatzbeginn des Bauelementes hoch (Frühausfälle) und steigt am Ende der Lebensdauer (Verschleißausfälle) an. In der Mitte sind die Zufallsausfälle gleichmäßig verteilt. Die Zeit bis zum Beginn der Verschleißausfälle nennt man Brauchbarkeitsdauer. Frühausfälle Um Bauelemente mit Frühausfällen aussondern zu können, sind die Eingangsprüfungen zu verschärfen oder Voralterungen vorzunehmen (entweder vor dem Einbau oder in der fertigen 2.1.3.2 Mittlere Ausfallrate Als Ausfallrate wird der Bruchteil von Ausfäl- Schaltung). Eine Voralterung ist eine auch burn in len pro Zeiteinheit bezeichnet, bezogen auf die genannte Dauerprüfung, die man in Form von elektrischen und thermischen Belastungszyklen Gesamtzahl der Bauelemente. Es gilt beispielsweise über einen Zeitraum von 168 Stunden durchführt. Anzahl der Ausfälle n (2.1) D Gesamtzahl der funktionsfähigen Zufallsausfälle Bauelemente N Testzeit t In diesem Bereich wird von einer konstanten Die Ausfallrate bezieht man auf eine Stunde (h1 ). Die Ausfallrate von einzelnen Bauelementen wird in fit (engl.: failure in time) angegeben: 1 fit D 109 =h. Ein Schichtwiderstand besitzt beispielsweise eine Ausfallrate D 0;2 109 h1 entsprechend 0,2 fit. Das bedeutet, der Widerstand fällt in einer Stunde mit einer Wahrscheinlichkeit von 0;2 109 aus, oder anders betrachtet: Bei 1=.0;2 109 / D 5 109 Bau- Ausfallrate ausgegangen. Die errechneten Werte sind die Grundlage für die Berechnung der Lebensdauer, auch Brauchbarkeitsdauer genannt, und der Zuverlässigkeit von Bauelementen. Verschleißausfälle Gegen Ende der Betriebszeit nehmen die Verschleißausfälle (z. B. wegen undichter Gehäuse, Korrosion, Materialversprödung) zu. Ein rechtzeitiges Auswechseln von kritischen Bauelemen- 2 Passive Bauelemente 99 Tab. 2.1 Ausfallraten einiger Bauelemente Bauelemente 1. Widerstände Kohleschicht Draht 2. Kondensatoren Keramik AI-Elektrolyt 3. Spulen HF-Spulen Transformatoren 4. Dioden Si, normal Si, Leistung LED 5. Transistoren Si, normal FET 6. Integrierte Schaltkreise digital, bipolar (MSI) digital, MOS (MSI) 7. Sonstige Halbleiter Optokoppler Thyristor 8. Verbindungen Steckkontakt Klemmkontakt Lötverbindung 9. Sonstige Bauelemente Glimmlampe Glühlampe .109 h1 / 0,1 1 0,06 5 0,3 1 0,05 0,5 0,1 Gesamtausfallrate Sind mehrere Bauelemente im Einsatz, dann errechnet sich die Gesamtausfallrate ges als Summe der einzelnen Ausfallraten. Es gilt: ges D 1 C 2 C 3 C : : : C n 2.1.3.3 Durchschnittliche Lebensdauer Bei der Berechnung der durchschnittlichen Lebensdauer tm geht man von einer konstanten Ausfallrate aus. Als durchschnittliche Lebensdauer tm benennt man die Zeit, die vergeht, bis 63 % aller Bauelemente ausgefallen sind. Mit der Ausfallrate besteht folgender Zusammenhang: D 1=tm 0,06 0,5 2 1 2 0,5 0,1 0,3 0,05 102 103 (2.2) (2.3) In der Regel wird der mittlere Ausfallabstand (MTBF: Mean Time Between Failure) eines Gerätes berechnet. Für n Bauelemente der gleichen Ausfallrate beträgt er tm D 1=.n/ (2.4) Beispiel 2.1-2 Ein Kofferradio besteht aus n D 120 Bauelementen mit der gleichen Ausfallrate von 2000 fit ( D 2000 109 h1 ). Wie lange funktioniert das Radio, wenn es täglich 3 Stunden in Betrieb ist? Lösung ten (Bauelementen mit niedrigem ) verhindert Der mittlere Ausfallabstand ist nach Gl. 2.4: diese Verschleißausfälle. Tabelle 2.1 zeigt die Ausfallrate einiger Bautm D 1=.n/ elemente. D 1=.120 2 106 h1 / Zu dieser Tabelle ist kritisch anzumerken, D 4167 h dass sich die Ausfallraten für dieselben Bau3 teile bis zum Faktor 10 unterscheiden können. Bei einer täglichen Betriebsdauer von 3 h Dies hängt vom Fertigungsverfahren, von der ist der mittlere Ausfallabstand 4167=3 D Verarbeitung beim Zusammenbau, von den 1389 Tage oder 3,8 Jahre. klimatischen Verhältnissen und von den Einsatzbedingungen (beispielsweise Flugzeug oder klimatisierter Raum) ab. Den strengsten Maßstab I Hinweis: Da Bauelemente auch altern, ohne legt das amerikanische militärische Handbuch dass diese ihre Funktion erfüllen (z. B. Lagerung), sind bei genaueren Berechnungen die MIL-HDBK-217 E an, dessen Zuverlässigdann gültigen, aber wesentlich kleineren keitswerte aber heute in der Praxis größtenteils übertroffen werden. Werte zu berücksichtigen. 100 Abb. 2.5 Kosten in Abhängigkeit vom Qualitätsgrad 2.1.3.4 Herstellgrenzqualität Eine der wichtigsten Voraussetzungen für den sicheren Einsatz und die Stabilität der Kennwerte ist die Qualität der Bauelemente. Wie Abb. 2.5 zeigt, sinken mit steigender Qualität die Ausfallkosten, während die Fehlerverhütungskosten der Produktion und die Prüfkosten für die Qualitätssicherung ansteigen. Mit den Verfahren der statistischen Qualitätssicherung ist es möglich, einen Qualitätsstandard zu garantieren sowie die Kosten für die Fehlerverhütung in der Herstellung zu verringern und die Prüfhäufigkeiten den tatsächlichen Erfordernissen anzupassen. Die statistischen Verfahren und die verwendeten Daten sind in DIN 40 080 nachzulesen. Die statistischen Grundlagen sowie die Prüfbedingungen stellt man häufig als OperationsCharakteristik dar. Sie ist die Annahmewahrscheinlichkeit der Liefermengen in Abhängigkeit vom Fehlerprozentsatz und ist in Abb. 2.6 wiedergegeben. Die Kennlinie zeigt, mit welcher Wahrscheinlichkeit eine Liefermenge mit einem bestimmten prozentualen Fehleranteil angenommen wird. Die Herstellgrenzqualität oder AQL (Acceptance Quality Level: annehmbare Qualitätsgrenzlage) ist der maximale Fehlerprozentsatz (in Abb. 2.6 bei 0,3 %), den man bei einer Stichprobenprü- E. Hering und K. Bressler Abb. 2.6 Annahmewahrscheinlichkeit in Abhängigkeit vom Fehleranteil in der Liefermenge (Operations-Charakteristik) fung als befriedigende durchschnittliche Herstellerqualität ansehen kann. In der Regel wird sie im Kaufvertrag zwischen Abnehmer und Hersteller festgelegt. Im Indifferenzpunkt (in Abb. 2.6 bei einer Fehlerrate von 0,6 %) ist die Annahmewahrscheinlichkeit 50 %, d. h. die Annahme und die Ablehnung ist gleich wahrscheinlich. Die Rückweisgrenzqualität (in Abb. 2.6 bei 1 % Fehleranteil) sagt aus, dass bei einem so hohen Fehleranteil die Annahmewahrscheinlichkeit lediglich bei 10 % liegt. Die genauen Prüfpläne unterscheiden sich noch in der Prüfschärfe (I: reduziert, II: normal und III: verschärft, sowie Sonderprüfungen S1 bis S4 für kleine Lose). Sie sind in DIN 40 080 nachzulesen. Die Komplexität der Industrieprodukte hat sehr stark zugenommen (z. B. befinden sich in einem PKW der Oberklasse 100 Rechner und ebenso viele Elektromotoren sowie eine Vielzahl von Sensoren, die nach den unterschiedlichsten physikalischen Prinzipien arbeiten). Diese komplexen Systeme müssen fehlertolerant sein. Das bedeutet, die Software muss fehlerhafte Bauelemente erkennen und andere Informationen verwenden, damit die Systeme weiterlaufen können und nicht still stehen. 2 Passive Bauelemente Tab. 2.2 Zahlenreihe E 6 p 6 E 6 10n D 10n=6 100=6 Wert 1 101 101=6 1,5 102=6 2,2 103=6 3,3 104=6 4,7 105=6 6,8 Tab. 2.3 Werte der Normreihen E 6, E 12, E 24, E 48, E 96 und E 192 (Ausschnitt) E6 E 12 E 24 ˙ 20 % ˙ 10 % ˙ 5 % 100 100 100 E 48 ˙ 2% 100 E 96 ˙ 1% 100 102 105 105 107 110 110 110 113 Abb. 2.7 Zahlenreihe E 6 115 115 118 120 2.1.4 Normreihen Die Nennwerte käuflicher Widerstände und Kondensatoren sind nach DIN 41 426 in Normreihen abgestuft, um eine wirtschaftliche Fertigung und Lagerhaltung zu ermöglichen. Die Normreihe hat den Kennbuchstaben E und ist eine geometrische Reihe, d. h. aufeinanderfolgende Werte unterscheiden sich immer um denselben Faktor q. Damit gilt für die Reihe die Gleichung y D q x , wobei y der Nennwert ist und x in ganzen Schritten von 0 ab läuft. Der Faktor q errechnet sich zu p E 10, wobei E die Nummer der Baureihe ist. In Tab. 2.2 ist die Zahlenreihe p E 6 berechnet. Der Faktor q beträgt hier q D 6 10 D 1;467 : : :, d. h. etwa 1,5. Von Reihe zu Reihe werden die Werte verdoppelt, d. h. es gibt üblicherweise die Reihen E 3, E 6, E 12, E 24, E 48 und E 92. Diese Verdoppelung hat zur Folge, dass die Werte der vorhergehenden Reihe in der folgenden enthalten sind. Dies zeigt Tab. 2.3. In Abb. 2.7 ist der Verlauf der Werte der ersten drei Reihen grafisch dargestellt. Zu den Bauelemente-Toleranzen ist zu bemerken, dass beispielsweise bei der E 12-Reihe die Werte um den Faktor 1,2 voneinander abweichen. 120 121 121 124 127 130 127 130 133 133 137 140 140 143 147 150 150 150 147 150 154 154 158 160 162 162 165 169 169 174 178 178 E 192 ˙ 0,5 % 100 101 102 104 105 106 107 109 110 111 113 114 115 117 118 120 121 123 124 126 127 129 130 132 133 135 137 138 140 142 143 145 147 149 150 152 154 156 158 160 162 164 165 167 169 172 174 176 178 102 E. Hering und K. Bressler Tab. 2.3 (Fortsetzung) E6 E 12 E 24 ˙ 20 % ˙ 10 % ˙ 5 % 180 180 E 48 ˙ 2% E 96 ˙ 1% 182 187 187 191 196 200 196 200 205 205 210 215 220 220 215 220 221 226 226 232 237 237 240 243 249 249 255 261 270 270 261 267 274 274 280 287 287 E 192 ˙ 0,5 % 180 182 184 187 189 191 193 196 198 200 203 205 208 210 213 215 218 221 223 226 229 232 234 237 240 243 246 249 252 255 258 261 264 267 271 274 277 280 284 287 291 294 298 301 Abb. 2.8 Klassifikation von Halbleiterbauelementen Lagerhaltung zu vereinfachen, sollte man Widerstände mit Drahtanschlüssen mit E 24-Stufungen, aber mit E 96-Werten wählen. Bei Chipwiderständen ist sogar die E 6-Stufung mit Werten aus der E 96-Reihe zu bevorzugen. Hierdurch kann man die Anzahl der benötigten Magazine für einen Bestückungsautomaten einschränken. 2.1.5 Klassifikation von diskreten Halbleiter-Bauelementen Um Bauelemente mit den gewünschten Kennwerten verwenden zu können, sind diese von der in Brüssel ansässigen Organisation PRO ELECTRON klassifiziert worden. Der PRO ELEKTRON-Typenschlüssel besteht aus drei Feldern (Abb. 2.8), bestehend aus zwei Buchstaben (erster Buchstabe: Material, zweiter Buchstabe: Funktion) und einem Kennzeichen (entweder dreistellige Zahl für Konsumelektronik oder ein Buchstabe und eine zweistellige Zahl für die Industrieelektronik). (Zu den Abkürzungen und ihren Bedeutungen s. Abschn. 3.1.6). 2.1.6 Datenblätter Datenblätter geben Auskunft über die mechanischen und elektrischen Eigenschaften des Bauelementes. Die Gliederung, der Inhalt und die 300 301 301 verwendeten Kurzzeichen sind in DIN 41 785 und DIN 41 791 festgelegt. Das Datenblatt entDas entspricht einer Toleranz von ˙ 10 %. Ei- hält: ne größere Toleranz für diese Reihe zuzulassen wäre sinnlos, weil dann der Wert bereits im Be- 1. Kurzbeschreibung des Bauelementes Hier reich der E 6-Reihe liegen würde. Das bedeutet, stehen die Typenbezeichnung, der Hersteller, die dass die Reihen die größtmögliche Toleranz vor- Technologie und der Anwendungsbereich. geben (z. B. für die Reihe E 24 eine Toleranz von ˙ 5 %). Bei Metallschicht- und Metallglasur- 2. Gehäusedaten Man erkennt die Werkstoffe, widerständen ist die E 96-Reihe üblich. Um die die Kenn-Nummer der Anschlüsse und bestimm294 2 Passive Bauelemente 103 te Markierungen (z. B. für die Polung und die 2.2 Widerstände Lage von Pin Nummer 1). Widerstände sind sehr häufig eingesetzte Bau3. Mechanische Daten Dazu gehören die elemente mit der Eigenschaft, den elektrischen Abmessungen mit Toleranzen, die Montage- Strom zu begrenzen. Das bedeutet: Ein Widerbedingungen (z. B. maximale Löttemperatur, stand erzeugt bei einer vorhandenen Spannung -verfahren und -zeit, kleinster Abstand vom Ge- den gewünschten Strom oder liefert bei einem gehäuse für das Abbiegen der Anschlussdrähte, gebenen Strom die gewünschte Spannung. Am Widerstand wird elektrische Energie in Wärme kleinste Länge der Anschlussdrähte). umgesetzt. Deshalb muss für den Einsatz der Wi4. Nennwerte Die Nennwerte beschreiben ent- derstände die Abhängigkeit seiner elektrischen weder als Zahlenwerte oder als Kennlinien die Kenngrößen von der Temperatur bekannt sein. Die Werte für den Widerstand umfassen einen Eigenschaften oder die Funktion eines Bauelesehr großen Bereich von m bis zu 30 M. mentes. Sie gelten ab Hersteller unter BeachOberhalb von 30 M wird der Einsatz kritisch, tung der Messbedingungen (z. B. Temperatur und weil Kriechströme und Instabilitäten die WiderFrequenz). Die Toleranz ist entweder als prostandswerte erheblich verfälschen können. Diese zentuale Abweichung oder als Grenzkurve einer Hochohmbereiche sind Sonderfälle, die speziell Kennlinie angegeben. Während die dynamischen Nennwerte das zeitliche Verhalten der einzelnen behandelt werden müssen. Um den angesprochenen großen Wertebereich Größen beschreiben, berücksichtigen die statider Widerstände zu realisieren, muss man geeigschen Nennwerte diese nicht. nete Materialien verwenden und entsprechende Geometrien auswählen. Dabei spielen folgende 5. Typische Werte Insbesondere bei Halbleiter- Kennwerte eine wichtige Rolle: der Widerstandsbauelementen werden typische Werte angegeben. wert, die Toleranz, die Belastbarkeit, der TempeSie sind völlig unverbindlich und können sich raturkoeffizient, die Größe (möglichst klein) und von Los zu Los unterscheiden. Für die Entwick- die Kosten. In den folgenden Abschnitten werden lung von Schaltungen sind die minimalen und die diese Kenngrößen ausführlicher beschrieben. maximalen Werte zu berücksichtigen. 6. Garantiewerte Je nach Hersteller, Bauele- 2.2.1 Übersicht über die Widerstände ment und Anwendung werden Maximal- und Minimalwerte (oder nur einer) garantiert. In Aus- Abbildung 2.9 zeigt eine Übersicht über die Winahmefällen kann der Kunde manche Bauele- derstände. mente mit gewünschten Kennwerten bestellen. Aus Abb. 2.9 ist zu erkennen, dass Widerstände in Festwiderstände eingeteilt werden, die 7. Grenzwerte Die Grenzwerte sind Absolut- einen festen Widerstandswert liefern und in einwerte, die nicht überschritten werden dürfen. stellbare Widerstände, deren Widerstandswerte Es handelt sich hierbei meist um Strom-, verstellbar sind. Die Festwiderstände können ein Spannungs-, Leistungs- und Temperaturwerte so- lineares Strom-Spannungs-Verhalten nach dem wie um mechanische Kenndaten. Im Hinblick auf Ohm’schen Gesetz (R D U=I ) aufweisen oder eine gute Zuverlässigkeit ist es immer zweckmä- nicht. Bei den nicht linearen Widerständen hängt ßig, die angegebenen Grenzwerte (engl.: absolute der Widerstand von einer physikalischen Größe maximum rating) zu unterschreiten. Man spricht ab, beispielsweise von der Temperatur (Heißleidann von einem Derating. Wird beispielsweise ter NTC und Kaltleiter PTC), von der Spannung eine 100 V-Diode nur mit einer Sperrspannung (Varistor VDR) oder vom Magnetfeld (Feldplatvon uR D 80 V betrieben, so ist der Derating- te). Die Lichtabhängigkeit der Widerstände (FoFaktor d D 0;8. towiderstände LDR) wird im Kap. 6 (Optoelek- 104 E. Hering und K. Bressler tronik) beschrieben. Die einstellbaren Widerstände kann man in der Regel entlang einer Geraden (linear) oder einer positiv oder negativ logarithmischen Kurve verändern (dies für Fälle, in denen große Widerstandsbereiche überstrichen werden). Widerstände, die während des Betriebs eingestellt werden können, nennt man Potenziometer; Widerstände, die vor dem Betrieb zum Abgleich einer Schaltung genau eingestellt werden müssen, werden Trimmer genannt. Alle diese Widerstände gibt es auch als oberflächenmontierbare Bauteile (OMB: Oberflächenmontierbare Bauteile oder engl.: SMD: Surface mounted Devices; Abschn. 1.9.3). In diesen Fällen führen die Widerstände die entstehende Wärme nicht direkt über die Luft, sondern über die Lötflächen der Leiterplatte ab. Das normalerweise günstiger und erlaubt deshalb eine geringere Baugröße der SMD-Widerstände. 2.2.2 Lineare Festwiderstände Ein linearer Festwiderstand besitzt einen festen, d. h. nicht veränderbaren linearen Widerstand. Als Werkstoffe finden, wie Abb. 2.9 zeigt, Drähte oder leitende Schichten (Kohleschichten bzw. Metallschichten) Verwendung. Neben den Edelmetall- und hochwertigen Metallglasurwiderständen werden auch Mehrfachwiderstände (arrays) auf ein Keramiksubstrat mit seitlichen Lötanschlüssen aufgebracht. Ein Beispiel sind Eingangs-Spannungsteiler von Messgeräten. Alle Widerstände werden in gleicher Technologie in einem Arbeitsgang aufgebracht, wodurch die Genauigkeit (vor allem der WiderstandsVerhältnisse) sehr groß ist. Abb. 2.9 Einteilung der Widerstände geben durch einen 6. Ring den Temperaturkoeffizienten des Widerstandes an. Dabei bedeuten die Farben schwarz bis grau abnehmende Temperaturkoeffizienten von 250 106 K1 bis 1 106 K1 . 2.2.2.1 Farbcodierung Beispiel 2.2-1 Der Nennwert eines Widerstandes ist meistens Ein linearer Festwiderstand trägt folgende durch Farbringe verschlüsselt. Dies hat den VorFarbringe: blau, grau, braun, orange, grün. teil, dass der Wert im eingebauten Zustand unabWelchen Widerstandswert besitzt er und in hängig von der Lage zu lesen ist. In Tab. 2.4 ist welche Toleranzklasse (und Baureihe) ist er der Internationale Farbcode zusammengestellt. einzuordnen? Bei Widerständen mit engen Toleranzen (z. B. bei Metallschichtwiderständen) werden für den Vorzugswert drei Stellen benötigt. Der Farbcode I Hinweis: Werden die Farbringe in verkehrter Reihenfolge (z. B. grün, orange, braun usw.) besitzt dann fünf Farbringe. Manche Hersteller 2 Passive Bauelemente 105 Abb. 2.9 (Fortsetzung) entschlüsselt, dann ergeben diese keinen EWert (Abschn. 2.1.4). rechnet sich wie folgt: Pmax D Lösung #0 #a Rth A (2.5) wobei #0 die Temperatur an der Oberfläche des Der Widerstandswert ist: R D 681 k, ToleWiderstandes und #a die Umgebungstemperatur ranz ˙ 0,5 % (Baureihe E 96). ist und Rth A der Wärmewiderstand in K=W (Kelvin pro Watt). Aus Gl. 2.5 ist ersichtlich, dass die 2.2.2.2 Belastbarkeit bei Dauerbetrieb Belastbarkeit umso größer ist, je größer die TemDie Belastbarkeit Pmax ist die während der Be- peraturdifferenz #0 #a (bei gleichem Wärmetriebszeit maximal umgesetzte Leistung und er- widerstand Rth A / oder je kleiner der Wärmewi- 106 Tab. 2.4 Internationaler Farbcode nach DIN JEC 62 und JEC 1151-4.5 E. Hering und K. Bressler Kennfarbe Widerstandswert in zählende Ziffern Multiplikator silber – 102 gold – 101 schwarz 0 1 braun 1 10 rot 2 102 orange 3 103 gelb 4 104 grün 5 105 blau 6 106 violett 7 107 grau 8 – weiß 9 Toleranz Temperaturkoeffizient ˙10 % ˙5 % – ˙ 1% ˙ 2% – – ˙ 0,5 % ˙ 0,25 % ˙ 0,1 % – – – ˙200 106 =K ˙100 106 =K ˙50 106 =K ˙15 106 =K ˙25 106 =K – ˙10 106 =K ˙5 106 =K ˙1 106 =K derstand Rth A ist (bei konstanter Temperaturdifferenz #0 #a /. In der DIN-Norm 44 051 ist festgelegt, dass die Nennbelastbarkeit eines Widerstandes für eine Umgebungstemperatur von #a D 70ı C anzugeben ist. Mit dieser Leistung P70 darf der Widerstand dauernd betrieben werden. 2.2.2.3 Impulsbelastbarkeit Widerstandswerkstoffe sind in der Lage, kurzzeitig wesentlich höhere Leistungen aufnehmen zu können als im Dauerbetrieb. Dabei bestehen folAbb. 2.10 Impulsbelastbarkeit von kappenlosen Widergende Unterschiede: ständen – Periodische Pulsfolge Hierbei können Pulsfolgen mit Spitzenspannungen bis zum 3,5-fachen der maximalen Betriebsspannung noch zulässig sein und eine Spitzenlast bis zur 6-fachen zulässigen Belastbarkeit (Einzelheiten sind in den jeweiligen DIN-Normen für die Widerstände festgelegt, Abb. 2.9). Die Kurve beschreibt eine Widerstandsänderung R=R < 0;25%. 2.2.2.4 Maximale Dauerspannung Umax Die maximale Dauerspannung Umax ist durch die Spannungsfestigkeit (Überschläge zwischen den Anschlüssen oder Teilen der Wendel) bestimmt. Sie hängt deshalb in hohem Maße von der Baugröße ab. Bei kleineren Widerstandsgeometrien – Vereinzelte Impulse sehr hoher (z. B. Baugröße 0204 und 0207) liegen die Werte Spitzenleistung Die Impulsbelastbarkeit hängt prinzipiell sehr zwischen 200 V und 350 V, bei größeren Bauforstark von der Impulsform und von der Impuls- men (z. B. Typ 0411 und 0617) bei 500 V bis breite ab. 750 V. Bei speziellen HochspannungswiderstänDie Beanspruchungen mit sehr energiereichen den sind wesentlich höhere Spannungen zulässig. Einzelimpulsen sind nicht genormt, sondern sind den jeweiligen Datenblättern der Hersteller zu 2.2.2.5 Kritischer Widerstandswert Rkrit Der kritische Widerstandswert Rkrit ist ein beentnehmen. Abbildung 2.10 zeigt die maximale Impulss- stimmter, im Datenblatt angegebener Wert, der pannung in Abhängigkeit vom Widerstandswert. sich aus der maximal zulässigen Dauerspannung 2 Passive Bauelemente 107 Umax und der Nennbelastbarkeit P70 nach folgender Gleichung errechnet: Rkrit D 2 Umax =P70 (2.6) Lösung Nach Gl. 2.7 ist: R=R D ˛ #, wobei # D #U C PRth (Gl. 2.5). Damit ist: R=R D 100 106 K1 .45 ı C C 0; 2 W 150K=W/ D 0;75% Ist der Nennwiderstandswert RN > Rkrit , dann wird die zulässige Spannung durch Umax bestimmt, im anderen Fall durch die Verlustleistung 2.2.2.7 Stabilität nach Gl. 2.6. Mit Stabilität bezeichnet man die relative Widerstandsänderung R=R, die durch elektrische Belastung oder andere Einflüsse in einem be2.2.2.6 Temperaturabhängigkeit Die Temperaturabhängigkeit eines Widerstandes stimmten Zeitraum verursacht wird. Der Wert wird durch den Temperaturkoeffizienten ˛ be- hängt im Wesentlichen von den verwendeten Wischrieben (auch TKR genannt), der definiert ist als derstandsmaterialien, der Oberflächentemperatur, Widerstandsänderung R=R pro Temperaturdif- dem Widerstandswert und von Umgebungseinferenz #. Seine Einheit ist deshalb 1=K. Somit flüssen (z. B. Klima, Feuchtigkeit oder starke Temperaturwechsel) ab. Bei sonst gleichen gilt: (2.7) Bedingungen sind niederohmige Widerstände ˛ D TKR D R=.R#/ stabiler, da die Schichtdicke größer ist. Es ist darauf hinzuweisen, dass der TemDie Messung der Stabilität erfolgt mit spezielperaturkoeffizient sowohl positiv (z. B. bei len Tests, wie durch schnelle Temperaturwechsel, reinen Metallen) als auch negativ (z. B. bei Lagerung bei hoher und niedriger Temperatur Kohle) sein kann (Angabe im Datenblatt mit und Unterdruck, Feuchte, Langzeitprüfung und C ). Bei Widerstandswerkstoffen aus MetallÜberlast. Außer in der Präzisionsmesstechnik, Legierungen (z. B. Drahtwiderständen oder deren Abhandlung den Umfang dieses Buches Metallschichtwiderständen) wird durch entspreübersteigen würde, prüft man nur maximale Abchende Legierungszusammensetzung versucht, weichungen. einen möglichst kleinen Temperaturkoeffizienten ˛ zu erreichen. Die Temperaturänderung #, die zur Wider- Rauschen standsänderung R=R führt, ergibt sich aus der Das Wort „Rauschen“ ist aus der Akustik entlieÄnderung der Umgebungstemperatur #U und der hen und bezeichnet in der Elektrotechnik ein SiTemperaturerhöhung aus der Belastung #Ü , wie gnal, das alle Frequenzen innerhalb einer großen sie durch den Wärmewiderstand bestimmt wird Bandbreite enthält. Es ist auf dem Oszilloskop als (Gl. 2.5). Üblich ist die Angabe des Tempera- breitbandiges, nichtperiodisches Signal zu erkenturkoeffizienten TKR in ppm=K (ppm: parts per nen. Folgende Arten von Rauschen eines Widermillion D 106 ). Bei den meisten Typen von standes sind zu unterscheiden: Metallschichtwiderständen wird ein Temperaturkoeffizient von TKR D ˙50ppm=K erreicht. 2.2.2.8 Thermisches Rauschen Das thermische Rauschen wird durch GitterBeispiel 2.2-2 Ein Nennwiderstand RN wird bei einer Umge- schwingungen im Werkstoff verursacht, welche bungstemperatur von 25 °C gemessen. Es ist die Ladungsträger beim Weg durch das Material der Wärmewiderstand Rth D 150 K=W, der in unregelmäßigen Abständen stören. Das therTemperaturkoeffizient ˛ D ˙100 106 K1 , mische Rauschen nimmt mit der Temperatur zu. die im Widerstand umgesetzte Leistung P D Nach Nyquist (NYQUIST, 1889 bis 1943) gilt für 0;2 W. Gesucht ist die maximale, relative Wi- die thermische Rauschleistung PR : derstandsänderung für eine Umgebungstemperatur #U D 70 ı C. PR D 4 kT df (2.8) 108 E. Hering und K. Bressler wobei k die Boltzmann-Konstante (k D 1;3806488 1023 J=K), T die absolute Temperatur und df die Bandbreite der p Messeinrichtung ist. Wegen der Beziehung U D PR gilt für die thermische Rauschspannung UR : UR D p 4 k T df R (2.9) Stromrauschen Wenn die Ladungsträger (meist Elektronen) durch Widerstandsschichten wandern, deren Material nicht homogen ist, entsteht Stromrauschen. Drahtwiderstände weisen praktisch keine Stromrauschspannung auf, während die Stromrauschspannungen bei Kohleschichtwiderständen hoch sind. Die gesamte Rauschspannung eines Widerstandes setzt sich aus dem thermischen Rauschen und aus dem Stromrauschen zusammen. 2.2.2.9 Nichtlinearität Bei einem linearen Widerstand wird erwartet, dass nach dem Ohm’schen Gesetz die Spannung proportional zum Strom ist (U D R I ). Bei sehr genauer Betrachtung ist der Widerstandswert jedoch spannungsabhängig. Dieses ist im Allgemeinen jedoch zu vernachlässigen. 2.2.2.10 Hochfrequenzverhalten Je nach Aufbau der Widerstände und Einbau in die Schaltung besitzt ein Widerstand R0 für hochfrequente Anwendungen eine Selbstinduktivität LS , eine Kapazität zwischen den Anschlusskappen CA und eine Teilkapazität bei einer vorhandenen Wendelung CW . Abbildung 2.11 zeigt das Ersatzschaltbild. Wegen der hohen Selbstinduktivität LS und den Kapazitäten der Wendelung CW sind Drahtwiderstände in der Regel für hochfrequente Anwendungen nicht geeignet. Bei ungewendelten Schichtwiderständen (Abschn. 2.2.2.12) – das sind meistens solche mit niedrigen Widerstandwerten – weicht der Scheinwiderstand bis etwa 100 MHz nicht wesentlich vom ohm’schen Wert ab. Je nach Widerstandswert und Frequenzbereich ist der Scheinwiderstand reell, induktiv, kapazitiv oder induktiv und Abb. 2.11 Ersatzschaltbild eines Widerstandes bei hohen Frequenzen kapazitiv. Abbildung 2.12 zeigt den Scheinwiderstandsverlauf für Schichtwiderstände. 2.2.2.11 Drahtwiderstände Die wichtigsten Werkstoffe, technischen Werte und Anwendungsfelder sind in Abb. 2.9 zusammengestellt. Bei den Drahtwiderständen ist der Widerstandsdraht auf einen Keramik- oder Glasfiberkörper gewickelt. Als Widerstandsdraht verwendet man folgende Legierungen: Cu–Ni (Konstantan), Cu–Ni–Mn (Manganin), Ni–Cr (Nickelin) und Au–Cr. Die Wicklungen und die Anschlüsse (Kappen oder Schellen) sind kontaktsicher verschweißt. Zum Schluss überzieht man die Widerstände zum Schutz gegen Umwelteinflüsse üblicherweise mit einer Lackschicht. Aber auch andere Oberflächenbehandlungen sind möglich. Für hohe Oberflächentemperaturen (bis 450 °C) glasiert oder zementiert man die Widerstände und umhüllt sie für hohe IsolationsSpannungsfestigkeiten (bis 2 kV) mit Keramik. Kleine hochbelastbare Widerstände umgibt man mit einem Metallgehäuse und montiert sie auf Kühlkörper. Die wichtigsten Vorteile von Drahtwiderständen sind: hohe Belastbarkeit (0,25–200 W), großer Temperaturbereich (55–450 °C) und geringer Temperaturkoeffizient (˛ D ˙106 K1 bis ˙200 106 K1 ). Nachteilig wirken sich neben den hohen Preisen vor allem die hohen Selbstinduktivitäten der Drahtwicklungen aus, so dass ein Einsatz dieser Widerstände im Hochfrequenzbereich nicht in Frage kommt. In der Praxis finden Drahtwiderstände bis zu einem Wert von R 200 k Verwendung. 2 Passive Bauelemente 109 fall von Kohlenwasserstoffen bei hohen Temperaturen (900 ı C bis 1100 ı C). Die Schichtdicken liegen dabei im nm- (hohe Widerstandswerte) oder im m-Bereich (niedrige Widerstandswerte). Kohleschichtwiderstände haben einen negativen Temperaturkoeffizienten 1000 106 =K ˛ 200 106 =K. Die Metallschicht lässt sich entweder galvanisch abscheiden (dickere Schichten für niedrige Widerstandswerte) oder im Vakuum aufdampfen (Sputterverfahren; auch für dünnere Schichten, d. h. für hohe Widerstandswerte; zum Verfahren s. Abschn. 1.9.5). Eine Edelmetallschicht (z. B. Au–Pt) entsteht durch Reduktion von Edelmetallsalzen beim Einbrennen. Da die aufgebrachten Widerstandsschichten höchstens bis 10 % genau sein können, erfolgt der genaue Widerstandsabgleich durch einen Laserabgleich. Wenn der genaue Widerstandswert erreicht ist, schneidet der Laser die restliche Widerstandsschicht ab. Die SMD-Widerstände mit einer Toleranz des Widerstandswertes von 1 % sind sehr preiswert und besitzen einen hohen Verbreitungsgrad. Metallschichtwiderstände sind die am häufigsten eingesetzten Widerstände. Die entsprechenden Daten sind in Abb. 2.9 zusammengestellt. Abb. 2.12 Verlauf des Scheinwiderstandes Z für Schichtwiderstände; a R < 100 , b 100 < R < 1000 , c R > 1000 2.2.2.12 Schichtwiderstände Schichtwiderstände (Abb. 2.9) bestehen aus Kohle- oder Metallschichten (Cr–Ni), die auf Keramikkörpern aufgebracht sind. Bei Kohleschichtwiderständen entsteht die Widerstandsschicht durch den thermischen Zer- 2.2.2.13 Metallglasurwiderstände Dieser Widerstandstyp heißt auch Dickschichtoder Cermetwiderstand. Die Widerstandsschicht besteht aus Glasurpaste mit eingelagerten Metallteilen (Cermet) und wird in Dickschichttechnik (Abschn. 1.9.4) beispielsweise als mäanderförmiges Muster auf ein Keramiksubstrat aufgebracht, getrocknet und bei etwa 1150 °C eingebrannt. Als leitende Materialien dienen am häufigsten Tantal, Tantalkarbid, Titan und Titankarbid sowie Wolfram. Den genauen Widerstandswert stellt man auch hier durch Laserabgleich ein. Metallglasurwiderstände sind auch in Chipform zur SMDBestückung im Handel. Ihren Widerstandswert gleicht man durch Einschnitte, die quer zur Widerstandsbahn verlaufen, mit einem Laserstrahl ab. Abbildung 2.13 zeigt Chipwiderstände unterschiedlicher Größe, die der Anwender selbst abgleichen kann. 110 E. Hering und K. Bressler Widerständen (NTD-Si) und Kaltleitern (PTC) mit positivem Temperaturkoeffizienten. Die Varistoren sind spannungsabhängige Widerstände (VDR) und Feldplatten bieten magnetfeldabhängige Widerstände. Die lichtabhängigen Fotowiderstände (LDR) werden in der Optoelektronik (Kap. 6) beschrieben. Die Abhängigkeit des Widerstandswertes von den physikalischen Größen lässt sich durch Näherungsgleichungen (Abb. 2.9) berechnen. Die tatsächlichen Abhängigkeiten, die für den Einsatz in Schaltungen wichtig sind, stellt man aber durch Kennlinien dar. 2.2.3.1 Heißleiter (NTC-Widerstände) Heißleiter besitzen einen negativen Temperaturkoeffizienten (NTC: Negative Temperature Coefficient), d. h. die Leitfähigkeit ist im heißen Zustand größer als im kalten (daher der Name Heißleiter). Zum Einsatz kommen Mischkristalle aus Fe3 O4 (mit MgCr2 O4 oder Zn2 TiO4 ), aus Fe2 O3 (mit TiO2 ) sowie NiO oder CoO (mit Li2 O). Temperaturabhängigkeit Die Temperaturabhängigkeit eines Heißleiters lässt sich näherungsweise durch folgende Gleichung beschreiben: RT D RN eB.1=T 1=TN / (2.10) dabei bedeuten RT , RN den Widerstand bei der Temperatur T bzw. TN (Nenntemperatur) und B Abb. 2.13 Abgleichbare Chipwiderstände in Dickeine Materialkonstante (der „B“-Wert). schichttechnik Werkfoto Siegert electronic Durch Differenzieren der Gl. 2.10 ergibt sich der Temperaturkoeffizient ˛ zu 2.2.3 Nichtlineare Widerstände Wie Abb. 2.9 zeigt, sind die nichtlinearen Widerstände zusätzlich von einer weiteren physikalischen Größe abhängig. Diese Abhängigkeit wird im Widerstandssymbol durch die schräge Linie verdeutlicht, an deren Ende die entsprechende physikalische Größe steht. Was die Temperaturabhängigkeit betrifft, unterscheidet man zwischen Heißleitern mit negativem Temperaturkoeffizienten (NTC) sowie Silicium- ˛D B 1 dR D 2 R dT T (2.11) Die Widerstands-Kennlinie zeigt Abb. 2.14. Stationäre Spannungs-Strom-Kennlinie Trägt man die Werte für die Spannung bei konstanter Temperatur als Funktion des Stromes auf, dann ergibt sich die Spannungs-Strom-Kennlinie eines Heißleiters. Wird der Heißleiter von einem elektrischen Strom durchflossen, dann gilt für die 2 Passive Bauelemente 111 Abb. 2.15 Spannungs-Strom-Kennlinie mit Belastungsund Widerstandslinien. Werkfoto: Siemens Abb. 2.14 Widerstands-Temperatur-Kennlinie eines Heißleiters im Aluminium-Gehäuse. Werkfoto: Philips elektrische Leistung P : P D Gth .T Tu / C Cth dT dt (2.12) wobei Gth der Wärmeleitwert, T die Temperatur des Heißleiters, Tu die Umgebungstemperatur, und Cth die Wärmekapazität des Heißleiters ist. Wird dem Heißleiter elektrische Energie zugeführt, dann erwärmt er sich zunächst. Nach einiger Zeit ist der stationäre Zustand erreicht, d. h. er gibt die zugeführte elektrische Leistung durch Wärmeleitung oder Wärmestrahlung an die Umgebung ab. Dann wird dT =dt D 0, so dass sich aus Gl. 2.12 ergibt: P D Gth .T Tu / oder I RT D Gth .T Tu / oder 2 U =RT D Gth .T Tu / 2 (2.13) (2.14) Die Gl. 2.13 und 2.14 sind die Parameterdarstellung der Spannungs-Strom-Kennlinie. Im doppelt-logarithmischen Maßstab werden die Kurven gleicher Leistung (P D konst) und die Kurven gleicher Widerstandswerte (RT D konst) zu Geraden mit der Steigung von 45°. Abbildung 2.15 zeigt die zugehörige SpannungsStrom-Kennlinie. Wie die Kennlinie zeigt, ist der Widerstandsverlauf bei kleinen Strömen und Spannungen linear, da die zugeführte Leistung so gering ist, dass keine spürbare Eigenerwärmung auftritt. In diesem Bereich wird der Widerstand durch die Umgebungstemperatur oder die Fremderwärmung bestimmt. Deshalb können hier Fremdtemperaturen gemessen werden. Mit zunehmender elektrischer Belastung wird der Heißleiter selbst erwärmt (Eigenerwärmung) und der Widerstand beginnt zu sinken. In diesem Bereich kann man den Heißleiter zur Spannungsstabilisierung einsetzen. Das Haupteinsatzgebiet der Heißleiter liegt heute bei Schutz- und Kompensationsaufgaben; denn zur Messung der Fremderwärmung gibt es präzisere Widerstände (z. B. Silicium-Widerstände, s. Abschn. 2.2.3.2). Die Heißleiter werden beispielsweise sehr häufig zur Begrenzung des Einschaltstromes eingesetzt. Ein geeigneter, großer NTC wird einem Elektromotor (die Leistung kann durchaus im unteren kW-Bereich liegen) vorgeschaltet. Zuerst fällt ein großer Teil der Netzspannung am NTC ab. Dieser erwärmt sich innerhalb von 100 ms so stark, dass der Widerstand niederohmiger wird. In dieser Zeit hat sich der Motor in Bewegung gesetzt, eine Gegenspannung aufgebaut und zieht deshalb 112 E. Hering und K. Bressler wenn sich die Arbeitstemperatur im Wendepunkt der Kennlinie befindet. Für den Widerstandswert des parallelen Widerstandes Rp gilt dann: RP D RMNTC B 2 TM B C 2 TM (2.15) Dabei ist RMNTC der Widerstandswert des Heißleiters bei der mittleren absoluten Temperatur TM (wird der Kennlinie entnommen) und B ist der „B-Wert“ des Heißleiters. Die Steilheit der Kennlinie dR=dT der Kombination ist von der Temperatur in folgender Weise abhängig: Abb. 2.16 Linearisierung der Heißleiter-Kennlinie (Kaltwiderstand des NTC D 10 k/ durch einen ParallelWiderstand (Rp D 3 k/. Werkfoto: Siemens 1 dR B RMNTC D dT TM 2 Œ1 C .RMNTC =Rp /2 (2.16) Aus Gl. 2.15 lässt sich der Quotient RMNTC =Rp bestimmen. Wird er in Gl. 2.16 eingesetzt, dann kann man für ein bekanntes dR=dT den entsprechenden Heißleiter-Widerstand berechnen. Allerdings ist Folgendes zu beachten: Wird mit einem NTC die Kennlinie korrigiert, so macht sich dessen Nichtlinearität bei Temperaturabweichungen von ˙10 K bemerkbar. In diesen Fällen werden zur Korrektur besser Silicium-Widerstände eingesetzt, die im folgenden Abschnitt behandelt werde. weniger Strom. Die Sicherung muss nicht aktiv werden. Am heißen NTC fällt dann wenig Spannung ab, die Verluste sind gering und der Motor läuft mit seiner angegebenen Leistung. Für diesen Fall braucht man einen NTC mit großer Masse und großer Wärmekapazität. 2.2.3.2 Silicium-Widerstände Zum Einsatz kommt n-dotiertes Silicium mit Dotierungskonzentrationen zwischen 1014 cm3 und Kennlinienkorrektur 15 3 Für manche Schaltungen wird ein bestimmter 10 cm . Diese engen Toleranzen lassen sich Kennlinienverlauf benötigt, den kein handels- im Wesentlichen nur mit NTD-Silicium (Neutron üblicher Typ besitzt. In anderen Anwendungen Transmutated Doped) erreichen. Diese Siliciumstört die starke Nichtlinearität der Widerstands- Widerstände haben einen positiven TemperaturTemperatur-Kennlinie. Diese Forderungen lassen koeffizienten, d. h., der Widerstand nimmt mit sich durch eine Parallel- oder Reihenschaltung steigender Temperatur zu (Abb. 2.17). Dabei gilt mit einem Festwiderstand erfüllen. Allerdings als Näherung: ist der Temperaturkoeffizient ˛ der Kombination (2.17) R# D RS Œ1 C ˛ # C ˇ.#/2 aus Heißleiter und Festwiderstand immer kleiner als der des Heißleiters selbst. In Abb. 2.16 ist die Linearisierung einer Heißleiter-Kennlinie durch mit R# als Widerstand bei der Temperatur #, RS als Widerstand bei #S D 25 ı C, ˛ als Temperatureinen parallelen Festwiderstand zu sehen. Wie Abb. 2.16 zeigt, besitzt die neue Kenn- koeffizienten (˛ D 0;773 102 K1 ) und ˇ als linie einen S-förmigen Verlauf mit einem Wen- Temperaturkenngröße (ˇ D 1;83 105 K2 ). Für depunkt. Die beste Linearisierung erreicht man, die Dimensionierung einer Schaltung verwendet 2 Passive Bauelemente 113 Abb. 2.18 Schaltung zur Linearisierung der Kennlinie: a Reihenschaltung, b Parallelschaltung, c Leitwert in Abhängigkeit von der Temperatur bei einer Reihenschaltung von 2370 Abb. 2.17 Abhängigkeit des Widerstandes von der Temperatur. Werkfoto Philips ficient), d. h., die Leitfähigkeit ist im kalten Zustand größer als im warmen (daher der Name man häufig die Näherungsformel Kaltleiter), oder anders ausgedrückt: Der Widerstand steigt mit zunehmender Temperatur. Als (2.18) Werkstoff dient eine ferroelektrische MischkeraR D RS eA mik aus BaTiO3 oder SrTiO3 . Dabei ist A der Temperaturkoeffizient ˛ bei # D 25 ı C (A D 0;773 102 K1 ). Abbildung 2.17 Temperaturabhängigkeit zeigt die Abhängigkeit des Widerstandes von der Der Kaltleiter hat im Gegensatz zum HeißleiTemperatur. ter nicht immer einen positiven TemperaturkoDie leicht gekrümmte Kennlinie kann man effizienten, wie Abb. 2.19 zeigt. Auch ist die durch geeignete Festwiderstände – in Reihe Kurvenform nicht als mathematisch geschlosseoder parallel geschaltet – linearisieren. Ab- ne Funktion darzustellen. bildung 2.18 zeigt mögliche Schaltungen und Der positive Temperaturkoeffizient beginnt Teilbild 2.18c den Verlauf der Leitfähigkeit bei dem kleinsten Widerstand Rmin . Die Wi1=.R C R# / in Abhängigkeit von der Tempe- derstandsänderung erstreckt sich über mehrere ratur bei einem Serienwiderstand von 2370 . Zehnerpotenzen. Der Vorteil der Siliciumwiderstände gegenDer Hersteller gibt eine Bezugstemperatur #b über den Heißleitern ist die hohe Messgenauig- an, bei dem sich der kleinste Widerstandswert keit bei sehr engen Toleranzen zu einem güns- Rmin verdoppelt hat. Ab dieser Bezugstemperatigen Preis. Aus diesen Gründen verdrängen sie tur #b beginnt der steile Temperaturanstieg, der bei der Temperaturmessung und -kompensation für den Kaltleiter typisch ist, und endet bei der zunehmend die NTC-Widerstände. Temperatur #e . Vom Verlauf der Kennlinie sind folgende zwei Bereiche von Interesse: 2.2.3.3 Kaltleiter (PTC-Widerstände) Im Bereich des linearen, steilen Anstiegs Kaltleiter besitzen einen positiven Temperaturkönnen Temperaturmessungen vorgenommen koeffizienten (PTC: Positive Temperature Coefwerden. 114 E. Hering und K. Bressler schneller ab als Luft) führt zu unterschiedlichen Erwärmungen der Medien. Dies führt beim Kaltleiter, entsprechend der Temperaturen, zu unterschiedlichen Widerstandswerten. Diese sind ein Maß für die Füllhöhe von Flüssigkeiten. Auf die gleiche Weise kann festgestellt werden, ob sich ein Kaltleiter in einem ruhenden oder in einem strömenden Medium befindet. Auch wenn die Kaltleiter für genaue Messungen aufwändige Beschaltungen benötigen, so sind sie doch als kostengünstige Bauelemente (keine Halbleiterfertigungstechnologien) in kleinen Bauformen in den oben erwähnten Einsatzgebieten häufig anzutreffen. Wie Schaltungskombinationen mit Festwiderständen, Kaltleitern und Heißleitern bestimmt werden, ist in Abschn. 1.4.3 ausführlich dargestellt. 2.2.3.4 Spannungsabhängige Widerstände (Varistoren, VDR) Spannungsabhängige Widerstände (VDR: Voltage Dependent Resistor) werden auch VaristoAbb. 2.19 Widerstands-Temperatur-Kennlinie eines ren genannt. Ihre U=I -Kennlinie ist symmetrisch (Abb. 2.20), und der Widerstand nimmt mit steiKaltleiters gender Spannung ab, wie ein Nichtlinearitätsexponent ˛ beschreibt. Den Verlauf der Spannungs-Strom-Kennlinie Der Bereich des Übergangs von geringen Widerstandswerten zum steilen Anstieg zeigt ein beschreibt die Gleichung: schlagartiges Umschalten vom niederohmigen (2.19) I D K Ua in den hochohmigen Bereich. Man unterscheidet zwischen der EigenerwärI ist der Strom (in A) und U die Spannung mung und der Fremderwärmung (Erwärmung (in V) des Varistors, K eine geometrieabhängivon außen). Fließt ein Strom durch den Kaltge Konstante (in A V1 / und ˛ der Nichtlinealeiter, so erwärmt er sich (Eigenerwärmung). Dadurch steigt der Widerstand. Mit diesem Ef- ritätsexponent. Für den Widerstand R und die Leistung P in Abhängigkeit der angelegten Spanfekt kann der Strom begrenzt werden. Werden nung U gilt der Zusammenhang Kaltleiter beispielsweise in die Transformatorenwicklungen eingebaut, so erwärmen sie sich beim 1 1˛ (2.20) R D U=I D U Stromfluss (Außenerwärmung), der Widerstand K steigt und der Stromfluss wird verringert oder das P D UI D KU ˛C1 (2.21) Aggregat sogar ganz abgeschaltet. In diesem Fall dienen die Kaltleiter zur reversiblen Überstrom- Logarithmiert man Gl. 2.19 bis 2.21, so ergesicherung. Mit diesem Effekt werde sie auch als ben sich folgende Geradengleichungen, die eine selbstregelnde Thermostate eingesetzt. Kaltlei- anschauliche Beschreibung der Zusammenhänge ter werden auch als Flüssigkeits-Niveaufühler zulassen: eingebaut. Die unterschiedliche Wärmeleitfähiglog I D log K C ˛ log U (2.22a) keit der Medien (Flüssigkeit führt die Wärme http://www.springer.com/978-3-662-54213-2