Schwingungen und Resonanz
Werbung

Kapitel 4
Schwingungen und
Resonanz
Schwingungen sind Vorgänge, bei denen sich eine physikalische
Grösse in Abhängigkeit von der Zeit periodisch ändert.
Bei einer Schwingung bewegt sich z.B. ein Teilchen in einer periodischen Bewegung immer nur auf demselben Weg hin und her.
4.1 Harmonische Schwingungen
4.1.1 Sinus- und Kosinusförmige Bewegung
Versuchsexperiment. Pendel bewegt sich sinusförmig
Wir betrachten ein Pendel. Eine Masse wird an einem Faden aufgehängt.
Physik I
145
Schwingungen und Resonanz
Wenn wir die Masse aus seiner Gleichgewichtslage auslenken und
sie loslassen, schwingt sie um die Gleichgewichtslage.
Wie soll eine solche Bewegungskurve beschrieben werden?
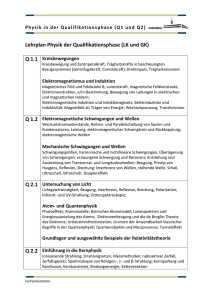
Wir beobacthen experimentell, dass für kleine Auslenkungen die Pendelbewegung gleich der Projektion einer Kreisbewegung ist.
Siehe Abb. 1. Der Punkt läuft mit konstanter Geschwindigkeit auf
dem Kreis um. Die Projektion des umlaufenden Punktes auf die yAchse wird dargestellt als
y = sin(θ ) = sin(ωt)
π/2 Kreis
Lichtquelle
1
y
π
θ
0
ωt
0
π
2
2π
3π
2
3π
5π
2
–1
3π/2
Die Pendelbewegung ist gleich der Projektion einer Kreisbewegung.
Ein Punkt bewegt sich mit konstanter Geschwindigkeit auf dem Kreis.
Figur 1.
Daraus schliessen wir, dass die Bewegung, der am Pendel aufgehängten Masse um ihre Gleichgewichtslage, einen sinusförmigen Verlauf
hat, der gegeben ist durch
x ( t) = A sin(ωt + φ )
wobei A die Amplitude, ω die Kreisfrequenz, und φ die Phasenkonstante ist.
146
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
Solche Bewegungen werden harmonische Schwingungen genannt.
Weil die Sinusfunktion nur Werte zwischen –1 und 1 annehmen kann,
ist die grösste Auslenkung aus der Gleichgewichtslage gleich der
Amplitude A, d.h. die Amplitude ist der Betrag der maximalen Auslenkung.
Die Amplitude A und die Phasenkonstante φ sind durch die Anfangsbedingungen festgelegt:
Zur Zeit t=0 ist die Auslenkung x(t) gleich
x ( t = 0) = A sin(φ ) ≡ x 0
wobei x0 der Anfangswert der Auslenkung ist.
Es gilt
d
sin(ωt) = ω cos(ωt)
dt
und
d
cos(ωt) = −ω sin(ωt)
dt
und die erste zeitliche Ableitung, die die Geschwindigkeit liefert, ist
gleich
v ( t) =
dx ( t)
= Aω cos(ωt + φ )
dt
Bei maximaler Auslenkung ist die Geschwindigkeit null. Die
Geschwindigkeit wird maximal, wenn die Masse durch die Gleichgewichtslage x=0 geht.
Zur Zeit t=0 ist die Geschwindigkeit
v ( t = 0) = Aω cos(φ ) = v 0
Physik I
147
Schwingungen und Resonanz
wobei v0 die Anfangsgeschwindigkeit ist. Mit Hilfe der Anfangsauslenkung und der Anfangsgeschwindigkeit werden die Konstanten A
und φ festgelegt.
z.B. für v0=0,
x (0) = A sin(φ ) = x 0
v (0) = Aω cos(φ ) = 0
π
φ =
⇒
2
A = x 0
π
⇒ x ( t) = x 0 sin(ωt + ) = x 0 cos(ωt)
2
Bemerkung. Harmonische Bewegungen können auch als Summe
von Kosinus- und Sinusfunktionen ausgedrückt werden. Aus der
Gleichung
sin(α + β ) = sin α cos β + cosα sin β
folgt
x ( t) = A sin(ωt + φ )
= A sin ωt cosφ + A cosωt sin φ
= B sin ωt + C cosωt
wobei B, C Konstanten sind.
Die Periode T der Schwingung ist definiert als die Zeit, die die Masse
benötigt, um eine vollständige Schwingung durchzuführen. Bei
einem vollständigen Zyklus erhöht sich die Phase der Sinusfunktion
um 2π. Zur Zeit t+T unterscheidet sich die Phase um 2π von der
Phase zur Zeit t:
ω ( t + T ) + φ = 2π + ωt + φ
148
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
oder
ωT = 2π
und so
T=
2π
ω
Die Frequenz ν ist die Anzahl der Schwingungen pro Sekunde
ν=
1 ω
=
T 2π
Die MKS-Einheit der Frequenz: Hertz (Hz) = 1/Sekunde
4.1.2 Horizontale Bewegung mit Federkraft (Federpendel)
Wir betrachten nun die reibungsfreie Bewegung einer Masse, die mit
einer Feder verbunden ist. Wir nennen eine solche Anordnung ein
Federpendel. Siehe Abb. 2.
Uns interessiert die eindimensionale Bewegung der Masse um ihre
Gleichgewichtslage.
Für eine Verschiebung x aus der Gleichgewichtslage, gibt es eine
Rückstellkraft, die nach dem Hookeschen Gesetz für kleine Verschiebung x proportional zu x ist:
F = − k( x − x0 )
wobei k die Federkonstante und x0 die Länge der entspannten Feder
ist (Siehe Kapitel 2). Wir setzen x0=0, d.h. der Ursprung der x-Achse
wird als die Gleichgewichtslage der Feder genommen.
Physik I
149
Schwingungen und Resonanz
F
x
F (Rückstellkraft)
x
x
Verschiebung
–kx
F = –kx
Horizontales Federpendel. Die Feder versucht die Masse in ihre
ursprüngliche Lage zurückzubringen.
Figur 2.
Wenn x=0 ist, sitzt die Masse in ihrer Gleichgewichtslage, und der
Betrag der Federkraft ist gleich null.
Wenn x verschieden von null ist, versucht die Federkraft die Masse in
ihre Gleichgewichtslage zurückzubringen.
150
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
4.1.3 Vertikale Bewegung mit Federkraft und aufgehängter
Masse
Im Fall, dass das Federpendel in vertikaler Richtung aufgehängt ist,
wirken zwei Kräfte auf die Masse: die Federkraft und die Gravitationskraft.
Siehe Abb. 3.
Die Gesamtkraft, die auf die Masse wirkt, ist
F = − k ( x − x 0 ) + mg
x0
x=xG+∆x
xG
F
Gleichgewichtslage
Figur 3.
Vertikales Federpendel.
Wenn wir die Masse an die Feder hängen, wird sich die Feder wegen
der Gravitationskraft, die nach unten gerichtet ist, verlängern.
Physik I
151
Schwingungen und Resonanz
Wir berechnen die Gleichgewichtslage xG als die Verschiebung, in
welcher die Gesamtkraft gleich null ist:
F ( xG ) = 0 = − k ( xG − x 0 ) + mg ⇒
xG = x 0 +
mg
k
Nun sind wir an der Verschiebung der Masse relativ zur Gleichgewichtslage interessiert:
∆x = x − xG
Die Gesamtkraft ist
F = − k ( ∆x + xG − x 0 ) + mg
mg
= − k ( ∆x + x 0 +
− x 0 ) + mg
k
= − k∆x
Wir schliessen daraus, dass die Rückstellkraft im Fall einer vertikal
aufgehängten Masse auch proportional zur Verschiebung, gemessen
relativ zur Gleichgewichtslage, ist.
4.1.4 Differentialgleichung der harmonischen Bewegung
Mit Hilfe der Lösung einer Differentialgleichung werden wir die
Kreisfrequenz der Schwingung als Funktion der physikalischen Grössen der schwingenden Anordnung bestimmen.
Wir benutzen Newtons zweites Gesetz für den Fall, dass die Kraft
proportional zur Verschiebung x ist, wobei der Ursprung der x-Ache
(x=0) die Gleichgewichtslage der Masse ist:
F = − kx = ma
152
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
Die Beschleunigung ist
dv d 2 x
=
a=
dt dt 2
d.h.
− kx = m
d2x
dt 2
⇒
d2x k
+ x=0
dt 2 m
Diese Bewegungsgleichung wird eine Differentialgleichung
genannt. Sie stellt eine Beziehung zwischen der Funktion x(t) und
ihrer zweiten Ableitung dar.
Gesucht wird die Funktion x(t), die die Gleichung erfüllt.
Diese Funktion x(t) ist bis auf den Faktor –(m/k) gleich ihrer zweiten
Ableitung:
2
m d x ( t)
x ( t) = −
k dt 2
Eine solche Bedingung erfüllen die Sinus- und Kosinusfunktionen.
Wir schreiben den Ansatz
x ( t) = A sin(ωt + φ )
wobei A die Amplitude, ω die Kreisfrequenz, und φ die Phasenkonstante ist.
Durch die Ableitung nach der Zeit erhalten wir
dx ( t)
= Aω cos(ωt + φ )
dt
Physik I
153
Schwingungen und Resonanz
und
d 2 x ( t)
= − Aω 2 sin(ωt + φ ) = −ω 2 x ( t)
dt 2
Wir setzen die Lösung x(t) in die Differentialgleichung ein
d2x k
+ x=0
dt 2 m
und finden
− Aω 2 sin(ωt + φ ) +
k
A sin(ωt + φ ) = 0
m
Wir beobachten, dass die Zeitabhängigkeit verschwindet, wenn wir
die Sinusfunktionen weglassen, und dass die Amplitude auch weggelassen werden kann. Es bleibt
−ω 2 +
k
=0
m
⇒
ω=
m
k
und T = 2π
k
m
D.h. die Kreisfrequenz ω ist durch die Federkonstante k und die
Masse m festgelegt.
Wir bemerken, dass
1.
2.
3.
154
die Kreisfrequenz von der Federkonstante und der inversen Masse
abhängt;
die Kreisfrequenz unabhängig ist von der Amplitude A der
Schwingung;
sobald die Masse erst einmal harmonisch schwingt, sie diese
Schwingung mit gleicher Amplitude, Kreisfrequenz und Phasenkonstante weiterführt.
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
4.1.5 Das Fadenpendel
Wir betrachten ein idealisiertes Fadenpendel. Es besteht aus einer
punktförmigen Masse, die an einem masselossen Faden hängt. Wir
betrachten keine Reibung.
Wenn das Pendel ausgelenkt und losgelassen wird, schwingt es unter
der Wirkung der Gravitationskraft in einer vertikalen Ebene.
Die Auslenkung s ist gleich
s = lθ
wobei l die Länge des Fadens ist.
Wir zerlegen die Gewichtskraft in eine tangentiale Komponente
mgsinθ und eine radiale Komponente mgcosθ.
Die tangentiale Komponente ist eine rücktreibende Kraft, und wir
schreiben deshalb
Ftangential = − mg sin θ
Siehe Abb. 4.
Die Geschwindigkeit und die Beschleunigung können auch zerlegt
werden. Für die tangentiale Geschwindigkeit und Beschleunigung
gilt
dθ
v tangential = l
dt
Physik I
und
atangential = l
d 2θ
dt 2
155
Schwingungen und Resonanz
s=lθ
θ
l
mg sinθ
m
s
mg
Figur 4.
Fadenpendel.
Aus dem zweiten Newtonschen Gesetz folgt
Ftangential = matangential
− mg sin θ = ml
d 2θ
dt 2
und schliesslich finden wir die Differentialgleichung für die Bewegung des einfachen Fadenpendels
d 2θ g
+ sin θ = 0
dt 2 l
In diesem Fall ist die rücktreibende Kraft nicht proportional zur Auslenkung, sondern zum Sinus des Auslenkungswinkels. D.h. die
Lösung dieser Gleichung ist nicht einfach harmonisch.
156
Physik I, WS 00/01, Prof. A. Rubbia
Harmonische Schwingungen
Um eine einfache harmonische Lösung zu finden, betrachten wir den
Fall, in dem der Auslenkungswinkel klein ist, so dass
sin θ ≈ θ
Siehe Abb. 5.
Kraft
sinθ≈θ
π
2
–π
2
θ
– mg sin θ
mgθ
Figur 5.
θ≈θ benutzen.
Für kleine Auslenkungen kann man die Näherung sinθ
Die Bewegungsgleichung wird vereinfacht
d 2θ g
+ θ ≈0
dt 2 l
mit einer einfachen harmonischen Lösung, wobei
ω=
g
l
und
T=
2π
l
= 2π
g
ω
Wir bemerken, dass
1.
die Periode T mit der Länge l zunimmt;
Physik I
157
Schwingungen und Resonanz
2.
3.
die Periode T unabhängig von der Masse m und der Schwingungsamplitude A ist;
aus der Periode T die Erdbeschleunigung g bestimmbar ist.
4.1.6 Versuchsexperiment: Vergleich des Feder- und
Fadenpendels
Wir beweisen mit einem Vergleich ihrer Bewegungen, dass die Bewegungen des Feder- und Fadenpendels ähnlich sind.
Die Periode des vertikalen Federpendels ist gleich
TFeder = 2 π
m
k
wobei m die Masse und k die Federkonstante ist.
Die Periode des Fadenpendels ist
TFaden = 2π
l
g
wobei l die Länge des Fadens und g die Erdbeschleunigung ist.
Wenn die Masse an der vertikalen Feder aufgehängt wird, verlängert
sich die Feder, bis das System seine Gleichgewichtslage erreicht, in
dem die Federkraft die Gravitationskraft kompensiert.
Die Verlängerung der Feder ist
xG − x 0 =
158
Physik I, WS 00/01, Prof. A. Rubbia
mg
k
Energieerhaltung bei harmonischen Schwingungen
Wenn die Länge l des Fadens gleich der Verlängerung ist
l = xG − x 0 =
mg
k
ist die Periode des Fadenpendels gleich der des Federpendels:
TFaden = 2π
l
mg
m
= 2π
= 2π
= TFeder
g
gk
k
Beide Masse werden sich zusammen bewegen.
4.2 Energieerhaltung bei harmonischen
Schwingungen
Wir kennen den Ausdruck der potentiellen Energie, die in einer Feder
gespeichert wird:
E=
1 2
kx
2
wobei x die Verschiebungs ist.
Wir kennen auch die analytische Lösung der harmonischen Schwingung
x ( t) = A sin(ωt + φ )
und die Geschwindigkeit ist gleich
v ( t) =
Physik I
dx
= Aω cos(ωt + φ )
dt
159
Schwingungen und Resonanz
Mit diesen Beziehungen wird die gesamte mechanische Energie, die
als die Summe der kinetischen und potentiellen Energie definiert ist,
geschrieben als
E = E kin + E pot
1 2 1 2
mv + kx
2
2
1
1
= mA 2ω 2 cos2 (ωt + φ ) + kA 2 sin 2 (ωt + φ )
2 44424443 1
2 44
1
42444
3
=
kinetische Energie
potentielle Energie
Nun bemerken wir, dass die Kreisfrequenz ω von k/m abhängt, so
dass
2
1
1 k
1 k 1
mω 2 = m
= m = k
2
2 m
2 m 2
und deshalb beide Teile der Gleichung für die Gesamtenergie denselben Faktor besitzen
[
]
1 2
kA cos2 (ωt + φ ) + sin 2 (ωt + φ )
2
1
= kA 2
2
E=
Die gesamte mechanische Energie des Systems verändert sich nicht
während der Schwingungsbewegung. Die Energie ist erhalten (natürlich, weil die wirkenden Kräfte rein konservativ sind, da wir keine
Reibung betrachtet haben.)
160
Physik I, WS 00/01, Prof. A. Rubbia
Gedämpfte harmonische Schwingungen
4.3 Gedämpfte harmonische
Schwingungen
Bei der freien Schwingung bleibt die Gesamtenergie konstant. Einmal angeregt, wird die Masse unendlich lang weiterschwingen.
Bei vielen Schwingungen bewegt sich die Masse nicht zwischen denselben Grenzen hin und her.
In der Realität entziehen Reibungskräfte der Bewegung-Energie. Das
System verliert mechanische Energie durch die von Reibungskräften
geleistete Arbeit.
Man spricht von gedämpften harmonischen Schwingungen.
Wir betrachten die idealisierte Situation, in der die Reibungskraft proportional zur Geschwindigkeit der Masse und immer ihr entgegengesetzt ist.
F ( t) = FRückstellkraft + FDämpfungkraft
= − kx ( t) − bv ( t)
wobei b die Dämpfungskonstante ist.
Die Differentialgleichung ist dann
F = ma = − kx ( t) − bv ( t)
dx
d2x
= m 2 = − kx − b
dt
dt
d.h.
d 2 x b dx k
+
+ x=0
dt 2 m dt m
Physik I
161
Schwingungen und Resonanz
Diese Gleichung ist die Bewegungsdifferentialgleichung der einfachen gedämpften harmonischen Schwingung.
Nun müssen wir die Lösung x(t) vermuten. Der schwierigste Teil der
Lösung einer Differentialgleichung ist, dass man schon den Ansatz
vorher richtig raten muss, bevor man die Lösung finden kann.
Der Ansatz ist in diesem Fall
x ( t) = {
Ae −δt sin(
t4
+3
φ)
14ω
2
Amplitude
Schwingung
wobei δ der Dämpfungsfaktor ist.
Die Lösung x(t) einer schwach gedämpften Schwingung ist in Abb. 6
gezeigt. Die Bewegung verläuft in Form einer harmonischen Schwingung, deren Amplitude allmählich abnimmt.
Mit Algebra findet man die Bedingungen für den Dämpfungsfaktor
und die Kreisfrequenz
ω=
k
−δ2
m
und
δ=
b
2m
Wir definieren als ω0 die Kreisfrequenz der freien Schwingungen
ω0 =
k
m
und
ω = ω 02 − δ 2
Wir diskutieren jetzt die möglichen Lösungen (Siehe Abb. 7),
162
Physik I, WS 00/01, Prof. A. Rubbia
Gedämpfte harmonische Schwingungen
Figur 6.
Eine schwach gedämpfte Schwingung.
a) ungedämpfte Schwingung
δ=0
k
m
⇒
ω = ω0 =
⇒
ω = ω 02 − δ 2
b) gedämpfte Schwingung
δ≠0
b1) δ < ω0: die Bewegung ist eine Schwingung mit einer gedämpften
Amplitude. Aus der Gleichung
ω = ω 02 − δ 2
Physik I
163
Schwingungen und Resonanz
schliessen wir, dass die Kreisfrequenz der gedämpften Bewegung
immer kleiner als die der freien Bewegung ist. Die Reibungskräfte
verlangsamen die Schwingung.
Die Bedingung ist
2
δ < ω0
⇒
k
b
δ = < ω 02 =
⇒
2m
m
2
b < bk = 4 mk
d.h. die Dämpfungskonstante darf nicht zu gross sein, oder die Masse
kann nicht schwingen.
Wenn die Dämpfung zunimmt, wird sie einen kritischen Wert erreichen, bei dem keine Schwingung mehr auftritt.
b2) δ = ω0: die Bewegung erreicht den aperiodischen Grenzfall, der
kritische Dämpfung genannt wird.
δ = ω0
⇒
b = bk = 4 mk = 2 mω 0
Die Kreisfrequenz ist ω=0, und die Masse bewegt sich nur noch auf
ihre Gleichgewichtslage hin, aber schwingt nicht.
b3) δ > ω0: die Bewegung befindet sich im Bereich der überkritischen Dämpfung.
Je grösser die Dämpfung, desto länger dauert die Rückkehr der
Masse in die Ruhelage.
Die Kreisfrequenz besitzt keine physikalische Bedeutung mehr, weil
die Wurzel eines negativen Werts nicht reell ist.
164
Physik I, WS 00/01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Gedämpfte Schwingung. Die Auslenkung x(t) als Funktion der Zeit
(t) und der Dämpfungskonstante b ist gezeigt. Wenn b grösser als der
kritische Wert bk ist, gibt es keine Schwingungen mehr.
Figur 7.
4.4 Erzwungene Schwingungen und
Resonanz
Obwohl die Wirkung von Reibungskräften nicht vermieden werden
kann, ist es möglich, dem schwingenden System Energie zuzuführen,
so dass die Reibungsenergieverluste kompensiert werden.
Wir können z.B. durch eine aufgezogene Feder Energie hineinbringen.
Physik I
165
Schwingungen und Resonanz
Man spricht von erzwungenen Schwingungen.
Wir betrachten eine, auf das schwingende System wirkende, äussere
periodische Kraft, die kosinusförmig ist
Fäussere = F0 cos(ωt)
wobei ω die Kreisfrequenz der äusseren Kraft ist. Die Kreisfrequenz der freien Schwingung (die Eigenkreisfrequenz) wird als ω0
bezeichnet.
Experimentell beobachten wir, dass nach einer nicht-stationären
Schwingung (Einschwingvorgang), bei der sich die Masse kompliziert bewegt, die Masse dann mit der Kreisfrequenz der äusseren
Kraft schwingt.
Erzwungene Schwingung. Nach einer nicht-stationären
Schwingung, wird die Masse mit der Kreisfrequenz der äusseren Kraft
schwingen.
Figur 8.
166
Physik I, WS 00/01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Wir suchen die stationäre Lösung.
Die Bewegungsgleichung einer schwingenden Masse, die an eine
Feder mit Federkonstante k gebunden ist, und einer Reibungskraft –
bv und der antreibenden Kraft F0cosωt unterworfen ist, ist
m
dx
d2x
+ F0 cos(ωt)
2 = − kx − b
dt
dt
d.h.
dx
d2x
m 2 +b
+ kx = F0 cos(ωt)
dt
dt
Der stationäre Ansatz wird geschrieben als
x ( t) = A cos(ωt − α )
wobei ω die Kreisfrequenz der äusseren Kraft, A die Amplitude und
α eine Phasenkonstante ist.
Die Amplitude und die Phase der Schwingung hängen von der
Amplitude und der Winkelgeschiwndigkeit der äusseren Kraft, von
der Kreisfrequenz der freien Schwingung ω0, und vom
Dämpfungsfaktor b ab.
Die Ausdrücke für A und α können leicht mit Algebra gefunden werden.
Physik I
167
Schwingungen und Resonanz
Wir lösen die Differentialgleichung mit Hilfe der komplexen Zahlen.
Wir schreiben eine neue Gleichung, die für z in der komplexen Ebene
gilt
m
dz
d 2z
+ kz = F0e iωt
2 +b
dt
dt
Gesucht ist die komplexe Lösung z(t).
Wegen der Eulerschen Formel,
e iθ = cosθ + i sin θ
ist die Lösung x(t) gleich der reellen Projektion der komplexen
Lösung z(t)
x ( t) = Re z( t)
Um die Differentialgleichung zu lösen, verwenden wir den folgenden
komplexen Ansatz
z( t) = Ae i(ωt −α )
Die zeitlichen Ableitungen sind
dz
= Aiωe i(ωt −α ) = iωz( t)
dt
d 2z
2 i(ωt −α )
= −ω 2 z( t)
2 = A(iω ) e
dt
168
Physik I, WS 00/01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Wenn wir diese Gleichung in der Differentialgleichung einsezten, finden wir
m(−ω 2 z( t)) + b(iωz( t)) + kz( t) = F0e iωt
− mω 2 Ae i(ωt −α ) + ibωAe i(ωt −α ) + kAe i(ωt −α ) = F0e iωt
(− mω
2
+ ibω + k ) Ae − iα = F0
d.h.
ω )+
(1k4−2m4
3
2
reell
F
ib
ω = 0 e iα
{
A
imaginär
Nun betrachten wir den rellen und den imaginären Teile der Gleichung. Es gilt
F0
2
A cosα = k − mω
F0 sin α = bω
A
Wenn wir nach der Amplitude und der Phase auflösen, finden wir
A=
F0
m 2 (ω 02 − ω
)
2 2
+ b 2ω 2
und
tan α =
bω
m(ω 02 − ω 2 )
wobei die Winkelgeschwindigkeit der freien Schwingung (die Eigenkreisfrequenz)
ω0 = k / m
ist.
Physik I
169
Schwingungen und Resonanz
Wir schliessen daraus, dass die Amplitude und die Phase stark von
der Kreisfrequenz der treibenden Kraft abhängen.
Wenn die Kreisfrequenz der treibenden Kraft in der Nähe der Eigenkreisfrequenz ist, wird die Amplitude der Schwingung zunehmen.
Eine Resonanzbedingung wird erreicht, wenn die Amplitude der
Schwingung viel grösser als die der antreibenden Kraft ist (Siehe
Abb. 9),
Wenn wir die Energie des Systems betrachten, beobachten wir, dass
die von der treibenden Kraft geleistete Arbeit Energie zuführt, die die
Schwingungsamplitude vergrössert. Diese Energie wird auch durch
Reibung verloren.
Zwischen zugeführter und verlorener Energie stellt sich schliesslich
ein Gleichgewicht ein. Die Masse schwingt mit der Kreisfrequenz der
treibenden Kraft ω und einer Amplitude die von ω und ω0 abhängt.
Erzwungene Schwingung. Wenn die Kreisfrequenz der
antreibenden Kraft in der Nähe der Eigenkreisfrequenz ist, wird die
Amplitude der Schwingung zunehmen.
Figur 9.
170
Physik I, WS 00/01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Für eine Kreisfrequenz ω stark verschieden von der Eigenkreisfrequenz ω0, folgt α ≈ 0.
Ist ω0≈ω, wird α ≈ π/2.
Die Rezonanzbedingung, bei der die Amplitude maximal wird, ist
ω ≈ ω Resonanz = ω 02 −
b2
2m 2
Die Geschwindigkeit der Masse kann mit der Ableitung nach der Zeit
gefunden werden
v ( t) =
dx
= − Aω sin(ωt − α )
dt
Im Resonanzfall, wenn α ≈ π/2, sind die Geschwindigkeit und die
treibende Kraft in Phase
π
v ( t) = − Aω sin(ωt − ) = A cos(ωt)
2
Die Beziehung der Amplitude als Funktion des Verhältnisses ω/ω0 ist
in Abb. 10 für verschiedene Dämpfungsfaktoren gezeigt.Für b=0
(d.h. keine Dämpfund) wird die Amplitude unendlich, wenn die
Resonanzbedingung erreicht wird.
Physik I
171
Schwingungen und Resonanz
Amplitude der erzwungenen Schwingung. Die verschiedenen
Kurven entsprechen verschiedenen Dämpfungsfaktoren. Für b=0 (keine
Dämpfung) wird die Amplitude unendlich, wenn die Resonanzbedingung
erreicht wird.
Figur 10.
Versuchsexperiment. Tacoma Brücke.
172
Physik I, WS 00/01, Prof. A. Rubbia
Kapitel 5
Mechanische Wellen
5.1 Was sind Wellen?
Wir betrachten ein Medium in seiner Gleichgewichtslage. Wenn wir
eine physikalische Eigenschaft dieses Mediums in einem Punkt stören, wird sich diese Störung durch das Medium ausbreiten.
Diese Störung wird eine Welle genannt. Man spricht von Wellenausbreitung.
Als Medium können wir viele verschiedene Beispiele erwähnen, z.B.
ein Seil, eine Saite, ein Festkörper, die Luft, Wasser, usw...
5.2 Seil- oder Saitenwellen
Wir betrachten ein Seil.
Physik I
173
Mechanische Wellen
Wenn wir es mit einem kurzen seitlichen Ruck auslenken, beobachten
wir, dass die anfängliche Auslenkung als Wellenberg mit konstanter
Geschwindigkeit entlang dem Seil wandert. Siehe Abb. 1.
Wir sagen, dass sich die transversale Auslenkung als eine Welle ausbreitet.
a)
b)
c)
d)
Ausbreitung einer Seilwelle. Der Wellenberg wandert mit
konstanter Geschwindigkeit.
Figur 1.
Man kann sich die Wellen als Auslenkung kleiner Massenlemente des
Seils vorstellen.
Wir bemerken, dass die einzelnen Massenelemente des Seils durch
die Wellenbewegung nicht transportiert werden: Sie schwingen senkrecht zur Ausbreitungsrichtung der Welle. Sie bleiben so lange in
Ruhe, bis der Wellenberg sie erreicht, führen dann eine Schwingung
um ihre Ruhelage aus und kehren schliesslich in den Ruhestand
zurück.
174
Physik I, WS 00/01, Prof. A. Rubbia
Seil- oder Saitenwellen
5.2.1 Ausbreitungsgeschwindigkeit transversaler
elastischer Seilwellen
Der Zusammenhang zwischen der Ausbreitungsgeschwindigkeit der
Wellen und den physikalischen Eigenschaften des Seils kann mit
Hilfe der Newtonschen Gesetze hergeleitet werden.
Wir unterteilen das Seil in viele differentielle Massenelemente dm.
Ein Massenelement kann sich in der vertikalen Richtung um seine
Ruhelage bewegen.
Zur Zeit t=0 kann die Form des Seils durch eine Funktion ξ(x)
beschrieben werden, wobei ξ die Auslenkung des Seils ist. Jede
bestimmte Koordinate x entspricht einem Massenelement.
Nach einiger Zeit ist der Wellenberg weitergewandert und die Form
des Seils ist nun durch eine andere Funktion gegeben.
Die Form des Seils als Funktion der Zeit kann deshalb durch eine
Funktion von zwei Variablen ausgedrückt werden
ξ ( x, t)
wobei x die Raumkoordinate, und t die Zeit ist. Diese Funktion, die
Wellenfunktion heisst, beschreibt die Ausbreitung der Wellen durch
eine Anordnung aller Massenelemente des Seils als Funktion der
Zeit.
Wir betrachten nun ein einzelnes Massenelement. Die auf das Massenelement wirkende resultierende vertikale Komponente der Kraft
ist
Fy = S sin α ©
− S sin α
Physik I
175
Mechanische Wellen
wobei S die Spannung des Seils ist. α und α’ sind die Winkel an beiden Enden des Massenelements zu Horizontalen (die Gravitationskraft wird als vernachlässigbar gegenüber der Spannung
vorausgesetzt.). Siehe Abb. 2.
y
S
dm
α'
α
ξ(x+dx)
S ξ(x)
x
Figur 2.
x
x+dx
Kräfte, die auf das Massenelement dm wirken.
Für kleine Auslenkungen gilt die genäherte Gleichung
Fy ≈ S tan α ©
− S tan α
Die Steigung des Seils im Punkt x ist gleich der Ableitung nach x der
Auslenkung. Da die Funktion ξ von zwei Variablen abhängt, müssen
wir eine partielle Ableitung benutzen:
tan α =
176
∂ξ ( x, t)
∂x
Physik I, WS 00/01, Prof. A. Rubbia
und
tan α ©
=
∂ξ ( x + dx, t)
∂x
Seil- oder Saitenwellen
D.h. die resultierende vertikale Kraft kann als Funktion der Ableitung
der Auslenkungsfunktion geschrieben werden
Fy ≈ S tan α ©
− S tan α
∂ξ ( x + dx, t) ∂ξ ( x, t)
=S
−
∂x
∂x
≈S
∂ 2ξ
dx
∂x 2
wobei wir differentielle dx-Segmente angenommen haben.
Die Geschwindigkeit und die Beschleunigung der differentiellen Segmente können mit Hilfe der zeitlichen partiellen Ableitungen gewonnen werden:
∂ξ
v ( x, t) =
∂t
∂ 2ξ
und a( x, t) = 2
∂t
Aus dem zweiten Newtonschen Gesetz folgt
Fy = ( dm) a
⇒
S
∂ 2ξ
∂ 2ξ
dx
=
dm
∂x 2
∂t 2
Wir führen nun die Gesamtmasse des Seils M und seine Länge L ein.
Die Längendichte ρ des Seils wird definiert als
ρ=
M
L
⇒
dm = ρdx
Die Einheit der Längendichte ist Masse/Länge, d.h. kg/m.
Physik I
177
Mechanische Wellen
Mit Hilfe der Definition der Längendichte gilt die folgende Bewegungsgleichung
∂ 2ξ
∂ 2ξ
S 2 dx = ρdx 2
∂t
∂x
⇒
∂ 2ξ S ∂ 2ξ
=
∂t 2 ρ ∂x 2
Diese Gleichung wird die Differentialgleichung der Wellenausbreitung genannt.
Im allgemein nennt man eine Gleichung der Form
∂ 2ξ
∂ 2ξ
−K 2 =0
∂t 2
∂x
Wellengleichung, wobei K eine Konstante ist. Wir beweisen nun,
dass die Konstante K der Ausbreitungsgeschwindigkeit im Quadrat
entspricht.
5.2.2 Allgemeine Lösung der Wellengleichung
Wir suchen eine Funktion ξ(x,t), die die Wellengleichung erfüllt.
Im Fall der Seilwellen beschreibt ξ(x,t) die transversale Auslenkung
des Seils.
Gewöhnlich wird sich die Form eines Wellenberges mit der Zeit verändern. Dieser Effekt heisst Dispersion. Wir werden die Dispersion
vernachlässigen und eine stabile Form des Wellenberges annehmen.
Wenn ξ(x,t) die zeitliche und räumliche Ausbreitung der Wellen darstellt und es keine Dispersion gibt, sind die zwei Variablen x und t
nicht voneinander unabhängig. Die Ausbreitung der Wellen kann als
ξ ( x, t) = ξ ( x ± vt)
178
Physik I, WS 00/01, Prof. A. Rubbia
Seil- oder Saitenwellen
geschrieben werden, wobei v der Ausbreitungsgeschwindigkeit
(oder Phasengeschwindigkeit) der Welle entspricht.
Diese Gleichung stellt eine Welle dar, die sich ohne Dispersion in die
negative x-Richtung (+) oder die positive x-Richtung (–) ausbreitet.
Wir betrachten z.B. eine Welle, die sich in positiver x-Richtung
bewegt.
Siehe Abb. 3.
Der Wellenberg bewegt sich bezüglich des Ursprungs O mit der
Geschwindigkeit v längs der positiven x-Achse. Im mitbewegten
System mit Ursprung O’ wird die Bewegung für beliebige Zeiten
durch
ξ′ = ξ′( x ′)
beschrieben.
y
v×t
y'
v
v
O
Figur 3.
Physik I
O'
x,x'
Bewegtes Koordinatensystem.
179
Mechanische Wellen
Damit lautet die Wellenfunktion im nicht bewegten Koordinatensystem.
x ′ = x − vt
⇒
ξ ( x, t) = ξ ( x ′, 0) = ξ ( x − vt, 0)
Wir werden beweisen, dass die Geschwindigkeit der Ausbreitung mit
Hilfe der Differentialgleichung bestimmt werden kann.
2
∂ξ ( x, t) ∂ξ ∂x ′
∂ξ
∂ 2ξ ( x, t)
2 ∂ ξ
=
= (−v )
⇒
=v
∂t
∂x ′ ∂t
∂x ′
∂t 2
∂x ′ 2
∂ξ ( x, t) ∂ξ ∂x ′ ∂ξ
∂ 2ξ ( x, t) ∂ 2ξ
=
=
⇒
=
∂x
∂x ′ ∂x ∂x ′
∂x 2
∂x ′ 2
Wir erhalten daraus
2
2
∂ 2ξ ( x, t)
2 ∂ ξ
2 ∂ ξ ( x, t)
v
v
=
=
∂t 2
∂x ′ 2
∂x 2
D.h. die Ausbreitungsgeschwindigkeit kann direkt von der Differentialgleichung abgelesen werden.
5.2.3 Ausbreitungsgeschwindigkeit von Seilwellen
Wir verwenden das Ergebnis
2
∂ 2ξ ( x, t)
2 ∂ ξ ( x, t)
v
−
=0
∂t 2
∂x 2
180
Physik I, WS 00/01, Prof. A. Rubbia
Seil- oder Saitenwellen
Die Ausbreitungsgeschwindigkeit der Seilwellen wird damit vorausgesagt als
v2 =
S
ρ
⇒
v=±
S
ρ
wobei S die Spannung des Seils oder der Saite, und ρ die Längendichte ist.
Die Ausbreitungsgeschwindigkeit hängt nur von den Eigenschaften
des Seils ab.
Die Ausbreitungsgeschwindigkeit nimmt mit der Spannung zu. Je
grösser die Spannung ist, desto schneller wird das Massenelement in
seine Gleichgewichtslage zurückkehren.
Versuchsexperiment: Seilwelle: Ausbreitungsgeschwindigkeit bei
verschiedenen Spannungen.
Die Ausbreitungsgeschwindigkeit nimmt mit der Längendichte ab. Je
grösser die (träge) Masse ist, desto langsamer wird das Massenelement in seine Gleichgewichtslage zurückkehren.
Wir bemerken, dass die Einheiten der Gleichung gegeben sind durch
[N ]
[kg / m]
=
[kg
]
m / s2
=
kg / m
[m ] = m
[s ] s
2
2
d.h., die Einheit entspricht wirklich einer Geschwindigkeit.
Physik I
181
Mechanische Wellen
5.3 Prinzip der Superposition
In Abb. 4 beobachten wir zwei Wellenberge, die sich in entgegensetzten Richtungen bewegen.
Wenn sich die beiden Wellenberge treffen, ist die gesamte Auslenkung des Seils gleich der Summe der Auslenkungen der einzelnen
Wellenberge. Nachher trennen sich die Wellenberge wieder und laufen weiter, ohne dass sich ihre Form geändert hat.
a)
b)
c)
d)
Zwei Wellen begegnen sich. In c) ist die resultierende Amplitude
gleich der Summe der Amplituden der beiden einlaufenden Wellen.
Figur 4.
Diese fundamentale Eigenschaft von Wellen wird das Prinzip der
Superposition genannt.
Mathematisch wird diese Eigenschaft einfach ausgedrückt.
182
Physik I, WS 00/01, Prof. A. Rubbia
Prinzip der Superposition
Ist ξ1(x-vt) die Wellenfunktion der sich in positiver x-Richtung bewegenden Welle und ξ2(x+vt) der sich in negativer x-Richtung bewegenden Welle, so ist die Gesamtwellenfunktion die mathematische
Summe der Einzelwellenfuntkionen:
ξ ( x, t) = ξ1 ( x − vt) + ξ2 ( x + vt)
Im Fall, dass die Wellen entgegengesetzte Amplituden haben, werden
sie einander auslöschen (siehe Abb. 5.)
a)
b)
c)
d)
Prinzip der Superposition. Die resultierende Welle wird durch
Addition beider Wellen gefunden.
Figur 5.
Physik I
183
Mechanische Wellen
5.4 Harmonische Wellen
Wenn wir das Ende eines Seils in Form einer harmonischen Schwingung auf und ab bewegen, wird sich längs des Seils eine sinusförmige
Welle ausbreiten. Eine solche Welle wird als harmonische Welle
bezeichnet. Siehe Abb. 6.
Die laufende Welle kann mit Hilfe einer Sinusfunktion geschrieben
werden
ξ ( x, t) = ξ ( x ± vt) = ξ0 sin( k ( x ± vt))
wobei k die Wellenzahl (oder Wellenvektor), und ξ0 die Amplitude
ist.
ω
v
x
λ
Figur 6.
Sinusförmige Welle.
Der Abstand zwischen zwei aufeinanderfolgenden Wellenkämmen
wird die Wellenlänge λ genannt. Die Form der Welle wiederholt sich
im räumlichen Abstand einer Wellenlänge.
184
Physik I, WS 00/01, Prof. A. Rubbia
Superposition harmonischer Wellen
Die Wellenzahl hängt mit der Wellenlänge zusammen. Aus der
Raumabhängigkeit des Arguments der Sinusfunktion folgt
k ( x + λ ) = kx + 2π ⇒ kλ = 2π
⇒
k=
2π
λ
Die Wellenfunktion kann als Funktion der Kreisfrequenz ω berechnet werden
ξ ( x, t) = ξ0 sin( k ( x ± vt))
= ξ0 sin( kx ± kvt)
= ξ0 sin( kx ± ωt)
wobei für die Kreisfrequenz gilt
ω = kv
oder
v=
ω
k
5.5 Superposition harmonischer Wellen
Die durch Superposition harmonischer Wellen resultierende Welle
hängt von den Phasen der ursprünglichen Wellen ab.
Wir betrachten z.B. zwei harmonische Wellen, die von zwei gleichen
Quellen Q1 und Q2 mit derselben Amplitude, derselben Frequenz und
einem bestimmten Phasenunterschied kommen. Die zwei Wellen treffen sich in einem Punkt P, der sich im Abstand x1 von Q1, und x2 von
Q2 befindet. Siehe Abb. 7.
Wir betrachten einen bestimmten Zeitpunkt.
Physik I
185
Mechanische Wellen
Wegen des Prinzips der Superposition ist die resultierende Welle im
Punkt P gleich der Summe der zwei einlaufenden Wellen:
ξ ( x, t) = ξ1 ( x, t) + ξ2 ( x, t)
= A sin( kx1 − ωt) + A sin( kx 2 − ωt + δ )
wobei δ der Quellenphasenunterschied ist.
X1
Q1
P
X2
Figur 7.
Q2
Gangunterschied.
Weil die Wellen verschiedene Wege zurückgelegt haben, erreichen sie
den Punkt P mit einer zusätzlichen Phase. Diese Wegdifferenz wird
als der Gangunterschied ∆x bezeichnet
∆x = x 2 − x1 ⇒
ξ = A sin( kx1 − ωt) + A sin( k ( x1 + ∆x ) − ωt + δ )
= A sin( kx1 − ωt) + A sin( kx1 − ωt + (δ + k∆x ))
186
Physik I, WS 00/01, Prof. A. Rubbia
Superposition harmonischer Wellen
Aus der Gleichung
1
1
sin α + sin β = 2 sin (α + β ) cos (α − β )
2
2
folgt
1
1
ξ = 2 A sin kx1 − ωt + (δ + k∆x ) cos (δ + k∆x )
2
2
1
1
= 2 A cos (δ + k∆x ) sin kx1 − ωt + (δ + k∆x )
2
1444
2444
3 144442244443
Amplitude
harmonische Welle
d.h. die resultierende Welle ist eine harmonische Welle mit derselben
Frequenz und derselben Wellenzahl wie die einlaufenden Wellen. Die
Phase unterscheidet sich von beiden ursprünglichen Wellen. Die
Amplitude der resultierenden Welle ist gleich
1
2 A cos (δ + k∆x )
2
Für
1
(δ + k∆x ) = nπ
2
n = 0,1, 2,...
ist der Gangunterschied so, dass die beiden Wellen in Phase sind. Die
resultierende Welle besitzt die doppelte Amplitude. Man spricht von
konstruktiver Interferenz.
Für
1
1
(δ + k∆x ) = n + π
2
2
Physik I
n = 0,1, 2,...
187
Mechanische Wellen
addieren sich die Wellen zu null, weil sie gleich grosse, aber entgegengesetzte Amplituden besitzen. Man spricht von destruktiver
Interferenz, und die resultierende Welle verschwindet.
5.6 Stehende Wellen
5.6.1 Eigenschwingungen eines Seils
Versuchsexperiment: Eigenschwingung einer Saite
Ein Seil ist an zwei Wänden fixiert. Wenn wir das Seil mit einer äusseren Kraft in Form einer harmonischen Schwingung auslenken,
beobachten wir für bestimmte Frequenzen eine stehende Welle. Die
Amplitude der Schwingung ist in diesem Fall gross.
Man spricht von Resonanzfrequenzen. Die tiefste Frequenz heisst
Grund- oder erste Eigenfrequenz ν1. Die Welle wird als erste Harmonische bezeichnet.
Die zweite Eigenfrequenz ν2 hat die doppelte Frequenz. Siehe Abb. 8.
Die Schwingung (d.h. die zweite Harmonische) besitzt einen Knoten und zwei Bereiche, die Bäuche genannt werden.
Allgemein besitzt die n-te Harmonische (d.h. die stehende Welle miz
der Eigenfrequenz νn) genau n Bäuche und n-1 Knoten.
188
Physik I, WS 00/01, Prof. A. Rubbia
Stehende Wellen
Um die Eigenfrequenzen zu bestimmen, bemerken wir, dass für eine
stehende Welle die Länge L der Saite gleich einem ganzzahligen Vielfachen von λ/2 sein muss:
n
λ
=L
2
n = 1, 2, 3,...
D.h. es gibt eine unendliche Anzahl von Eigenfrequenzen, die die
Wellenlänge λn besitzen, wobei gilt
λn =
2L
n
n = 1, 2, 3,...
Aus dieser Bedingung für stehende Wellen können wir die Eigenfrequenzen νn der n-ten Harmonischen ableiten, als
υn =
v
v
=n
2L
λn
(n = 1, 2, 3,...)
wobei v die Ausbreitungsgeschwindigkeit einer Welle in der Saite ist.
Die Frequenz der n-ten Harmonischen kann als Funktion der Grundfrequenz (der ersten Harmonischen) ausgedrückt werden
υ1 =
v
2L
und υ n = nυ1
Aus der Bestimmung der Ausbreitungsgeschwindigkeit folgt
v=
S
ρ
⇒
υ1 =
1 S
2L ρ
wobei S die Spannung der Saite, und ρ die Längendichte ist, d.h.
die Harmonischen der Saite können mit Hilfe der Spannung geändert
werden.
Physik I
189
Mechanische Wellen
Saite
erste
Harmonische
L
Figur 8.
190
λ 1 = 2L
1
zweite
Harmonische
λ 2 = 2L
2
Dritte
Harmonische
λ 3 = 2L
3
4-te
Harmonische
λ 4 = 2L
4
5-te
Harmonische
λ 5 = 2L
5
n-te
Harmonische
λ n = 2L
n
Eigenschwingungen einer Gitarrensaite.
Physik I, WS 00/01, Prof. A. Rubbia
Stehende Wellen
5.6.2 Wellenfunktionen stehender Wellen
Wir betrachten zwei Wellen gleicher Wellenzahl, Frequenz und
Amplitude, und entgegengesetzter Ausbreitungsrichtung.
ξ1 ( x, t) = ξ0 sin( kx − ωt)
ξ2 ( x, t) = ξ0 sin( kx + ωt)
und
Aus dem Prinzip der Superposition folgt, dass die resultierende Welle
gleich
ξ ( x, t) = ξ1 ( x, t) + ξ2 ( x, t)
= ξ0 sin( kx − ωt) + ξ0 sin( kx + ωt)
= 2ξ0 sin( kx )cos(ωt)
ist.
Es folgt, dass ein Punkt an einem beliebigen Ort x eine einfache harmonische Bewegung hat, und dass die Amplitude von Ort zu Ort verschieden ist.
Ist die Saite an beiden Enden (d.h. bei x=0 und x=L) fest eingespannt,
gibt es eine Randbedingung, die für alle Zeiten gelten muss
ξ (0, t) = ξ ( L, t) = 0
für alle Zeiten t
Die Bedingung ist bei x=0 immer erfüllt. Bei x=L muss gelten
ξ ( L, t) = 2ξ0 sin( kL)cos(ωt) = 0
⇒ sin( kL) = 0
für alle Zeiten t
Die Bedingung wird erfüllt, wenn die Wellenzahl die folgenden
Werte besitzt
k n L = nπ
Physik I
n = 1, 2, 3,...
191
Mechanische Wellen
oder in Wellenlängen ausgedrückt
2π
L = nπ
λn
n = 1, 2, 3,...
oder
λn =
2L
n
n = 1, 2, 3,...
Dieses Ergebnis entspricht genau der Bedingung für stehende Wellen,
die wir schon gesehen haben.
Die Wellenfunktion für die n-te Harmonische kann daher ausgedrückt
werden als
ξn ( x, t) = ξn sin( kn x )cos(ω m t)
wobei
kn =
nπ
und ω n = 2πυ n
L
( n = 1, 2, 3,...)
5.7 Wellen im Festkörper
Longitudinale und transversale Wellen können sich durch Festkörper
ausbreiten. Ein Schlag an eine Ende eines festen Stabs pflanzt sich
z.B. längs des Stabs fort, und wird schliesslich an das andere Ende
des Stabs gelangen.
Versuchsexperiment. Welle im Messingstab.
192
Physik I, WS 00/01, Prof. A. Rubbia
Wellen im Festkörper
Longitudinale Wellen können sich in allen Medien ausbreiten, die
Volumenelastizität besitzen, wie z.B. in Festkörpern, aber auch in
flüssigen und gasförmigen Stoffen. Es muss eine Rückstellkraft wirken, die der Volumenänderung entgegen gerichtet ist.
Transversale Wellen sind etwas komplizierter, da bei ihnen Schubkräfte an den Massenlementen des Körpers angreifen müssen, um sie
wieder in ihre Ausgangslage zurückzutreiben. Solche Wellen breiten
sich nur in festen Körpern aus.
Die Ausbreitungsgeschwindigkeit der longitudinalen elastischen
Wellen in einem Festkörper lässt sich mit einem Gesetz über elastische Deformationen herleiten.
Der Ausdruck für die Ausbreitungsgeschwindigkeit kann mit einer
Dimensionsbetrachtung vermutet werden. Die Ausbreitungsgeschwindigkeit der Festkörperdeformationen im Quadrat muss umgekehrt proportional zur Dichte des Körpers sein
m 2
Y
=
v
3
s ρ kg / m
2
[
]
wobei Y eine Konstante ist. Die Dichte (oder Volumendicthe) ρ wird
definiert als
ρ=
M
V
wobei M die Masse des Körpers und V das Volumen ist.
Die Einheit der Dichte ist Masse/Volumen, d.h. kg/m3.
Physik I
193
Mechanische Wellen
Die Konstante Y muss die folgende Einheit besitzen:
kg m 2 kg kg.m N
Y= 3
= 2= 2 2= 2
m s m.s m s m
Sie wird Elastizitätsmodul Y genannt.
Allgemein ändert ein Körper seine Form, wenn Kräfte an ihm ziehen
oder ihn komprimieren. Wenn der Körper seine ursprüngliche Form
wieder annimmt, wenn die Kräfte nicht mehr wirken, dann heisst die
Deformation elastisch.
Die meisten Körper sind nur bis zu einer bestimmten Grenze der
Kräfte elastisch, die Elastizitätsgrenze genannt wird.
Innerhalb der Elastizitätsgrenze eines Metallstabs gilt das Hookesche Gesetz
F = YA
∆l
= YAε
l
wobei F die Kraft, die an dem Stab zieht, A der Querschnitt des Stabs
und Y das Elastizitätsmodul ist. Die relative Längenänderung (oder
Dehnung) ist
ε=
∆l
l
Nach dem Hookeschen Gesetz ist die Dehnung des Stabs proportional zu der Kraft geteilt durch den Querschnitt.
Einige repräsentative Ausbreitungsgeschwindigkeiten in verschiedenen Medien sind in Tabelle 1 zusammengefasst.
194
Physik I, WS 00/01, Prof. A. Rubbia
Wellen im Festkörper
TABLE 1. Ausbreitungsgeschwindigkeit
Stoff
Elastizitätsmodul (N/m2)
Ausbreitungsgeschwindigkeit (m/s)
Gase
Luft 0°C
331
Luft 20°C
343
Helium 20°C
965
Wasserstoff 20°C
1284
Flüssigkeiten
Wasser 0°C
1402
Wasser 20°C
1482
Seewasser 20°C
1522
Festkörper
Aluminium
1x10
11
6420
Stahl
2x1011
5941
Granite
Physik I
6000
195
Mechanische Wellen
196
Physik I, WS 00/01, Prof. A. Rubbia