Mathematische Physik: Klassische Mechanik
Werbung

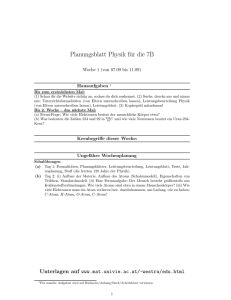
Mathematische Physik: Klassische Mechanik Andreas Knauf Mathematische Physik: Klassische Mechanik 123 Prof. Dr. Andreas Knauf Department Mathematik FAU Erlangen-Nürnberg Cauerstr. 11 91058 Erlangen Deutschland [email protected] ISBN 978-3-642-20977-2 e-ISBN 978-3-642-20978-9 DOI 10.1007/978-3-642-20978-9 Springer Heidelberg Dordrecht London New York Die Deutsche Nationalbibliothek verzeichnet diese Publikation in der Deutschen Nationalbibliografie; detaillierte bibliografische Daten sind im Internet über http://dnb.d-nb.de abrufbar. Mathematics Subject Classification (2010): 37N05 c Springer-Verlag Berlin Heidelberg 2012 Dieses Werk ist urheberrechtlich geschützt. Die dadurch begründeten Rechte, insbesondere die der Übersetzung, des Nachdrucks, des Vortrags, der Entnahme von Abbildungen und Tabellen, der Funksendung, der Mikroverfilmung oder der Vervielfältigung auf anderen Wegen und der Speicherung in Datenverarbeitungsanlagen, bleiben, auch bei nur auszugsweiser Verwertung, vorbehalten. Eine Vervielfältigung dieses Werkes oder von Teilen dieses Werkes ist auch im Einzelfall nur in den Grenzen der gesetzlichen Bestimmungen des Urheberrechtsgesetzes der Bundesrepublik Deutschland vom 9. September 1965 in der jeweils geltenden Fassung zulässig. Sie ist grundsätzlich vergütungspflichtig. Zuwiderhandlungen unterliegen den Strafbestimmungen des Urheberrechtsgesetzes. Die Wiedergabe von Gebrauchsnamen, Handelsnamen, Warenbezeichnungen usw. in diesem Werk berechtigt auch ohne besondere Kennzeichnung nicht zu der Annahme, dass solche Namen im Sinne der Warenzeichen- und Markenschutz-Gesetzgebung als frei zu betrachten wären und daher von jedermann benutzt werden dürften. Einbandentwurf: WMXDesign GmbH, Heidelberg Gedruckt auf säurefreiem Papier Springer ist Teil der Fachverlagsgruppe Springer Science+Business Media (www.springer.com) Inhaltsverzeichnis Bemerkungen zur Mathematischen Physik Motive und Ziele . . . . . . . . . . . . . Inhalte des Buches ,Klassische Mechanik’ Inhalte der Lehrbuchreihe . . . . . . . . . Zur Notation . . . . . . . . . . . . . . . . Kleines Englisch-Wörterbuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Einleitung xi xi xiii xiv xv xvi 1 2 Dynamische Systeme 2.1 Iterierte Abbildungen, dynamische Systeme . . . . . . . . . . . . 2.2 Stetige dynamische Systeme . . . . . . . . . . . . . . . . . . . 2.3 Differenzierbare dynamische Systeme . . . . . . . . . . . . . . . 11 12 16 25 3 Gewöhnliche Differentialgleichungen 3.1 Definitionen und Beispiele . . . . . . . . . . . . . . . . 3.2 Lokale Existenz und Eindeutigkeit der Lösung . . . . . 3.3 Globale Existenz und Eindeutigkeit der Lösung . . . . . 3.4 Transformation in ein dynamisches System . . . . . . . 3.5 Das maximale Existenzintervall . . . . . . . . . . . . . 3.6 Der Hauptsatz der Differentialgleichungstheorie . . . . 3.6.1 Linearisierung der DGL entlang einer Trajektorie 3.6.2 Aussage und Beweis des Hauptsatzes . . . . . . 3.6.3 Folgerungen aus dem Hauptsatz . . . . . . . . . . . . . . . . . 29 30 35 42 45 48 50 51 53 55 4 Lineare Dynamik 4.1 Homogene lineare autonome DGLn . . . . . . . . . . . . . . . . 4.2 Explizit zeitabhängige lineare DGLn . . . . . . . . . . . . . . . 4.3 Quasipolynome . . . . . . . . . . . . . . . . . . . . . . . . . . 57 58 65 70 5 Klassifikation linearer Flüsse 5.1 Konjugationen linearer Flüsse . . . 5.2 Hyperbolische lineare Vektorfelder 5.3 Lineare Flüsse in der Ebene . . . . 5.4 Beispiel: Feder mit Reibung . . . . 73 74 76 80 84 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v vi Inhaltsverzeichnis 6 Hamiltonsche Gleichungen und Symplektische Gruppe 6.1 Gradientenflüsse und hamiltonsche Systeme . . . . . . . 6.1.1 Gradienten–Differentialgleichungen . . . . . . . . 6.1.2 Hamiltonsche Systeme . . . . . . . . . . . . . . 6.2 Die symplektische Gruppe . . . . . . . . . . . . . . . . . 6.2.1 Lineare hamiltonsche Systeme . . . . . . . . . . 6.2.2 Symplektische Geometrie . . . . . . . . . . . . . 6.2.3 Die symplektische Algebra . . . . . . . . . . . . 6.3 Lineare hamiltonsche Systeme . . . . . . . . . . . . . . . 6.3.1 Harmonische Oszillatoren . . . . . . . . . . . . . 6.3.2 Harmonische Gitterschwingungen . . . . . . . . . 6.3.3 Teilchen im konstanten elektromagnetischen Feld 6.4 Unterräume symplektischer Vektorräume . . . . . . . . . 6.5 * Der Maslov–Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89 90 90 93 95 95 96 101 103 104 110 113 116 119 7 Stabilitätstheorie 7.1 Stabilität linearer Differentialgleichungen . 7.2 Liapunov-Funktionen . . . . . . . . . . . 7.3 Verzweigungen . . . . . . . . . . . . . . . 7.3.1 Verzweigungen von Ruhelagen . . 7.3.2 Verzweigungen periodischer Orbits 7.3.3 Verzweigungen des Phasenraums . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127 128 131 134 134 138 141 8 Variationsprinzipien 8.1 Lagrange- und Hamilton–Gleichungen 8.2 Holonome Zwangsbedingungen . . . . 8.3 Das hamiltonsche Variationsprinzip . . 8.4 Die Geodätische Bewegung . . . . . . 8.5 Die Jacobi–Metrik . . . . . . . . . . . 8.6 Das fermatsche Prinzip . . . . . . . . 8.7 Die geometrische Optik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143 144 149 152 159 164 169 171 9 Ergodentheorie 9.1 Maßerhaltende dynamische Systeme 9.2 Ergodische dynamische Systeme . . 9.3 Mischende dynamische Systeme . . . 9.4 Der birkhoffsche Ergodensatz . . . . 9.5 Der poincarésche Wiederkehrsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177 178 181 184 191 197 10 Symplektische Geometrie 10.1 Symplektische Mannigfaltigkeiten . . . . . 10.2 Lie–Ableitung und Poisson–Klammer . . . 10.3 Kanonische Transformationen . . . . . . . 10.4 Lagrange–Mannigfaltigkeiten . . . . . . . 10.5 Erzeugende kanonischer Transformationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201 202 208 213 219 221 . . . . . Inhaltsverzeichnis vii 11 Bewegung im Potential 11.1 Allgemein gültige Eigenschaften . . . . . . . . . . . . . . 11.1.1 Existenz des Flusses . . . . . . . . . . . . . . . . 11.1.2 Reversibilität des Flusses . . . . . . . . . . . . . 11.1.3 Erreichbarkeit . . . . . . . . . . . . . . . . . . . 11.2 Bewegung im periodischen Potential . . . . . . . . . . . 11.2.1 Existenz der asymptotischen Geschwindigkeiten . 11.2.2 Verteilung der asymptotischen Geschwindigkeiten 11.2.3 Ballistische und diffusive Bewegung . . . . . . . 11.3 Himmelsmechanik . . . . . . . . . . . . . . . . . . . . . 11.3.1 Geometrie des Kepler–Problems . . . . . . . . . 11.3.2 Zwei Gravitationszentren . . . . . . . . . . . . . 11.3.3 Das n–Körper-Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225 226 226 227 228 228 229 231 235 238 239 247 252 12 Streutheorie 12.1 Potentialstreuung . . . . . . . . . . . . . . . . . . . . . 12.2 Die Møller-Transformationen . . . . . . . . . . . . . . . 12.3 Der differentielle Wirkungsquerschnitt . . . . . . . . . . 12.4 Zeitverzögerung, Radon–Transform., Inverse Streutheorie 12.5 Kinematik der Streuung von n Teilchen . . . . . . . . . 12.6 * Asymptotische Vollständigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259 260 268 275 279 286 291 13 Integrable Systeme und Symmetrien 13.1 Was bedeutet Integrabilität? Ein Beispiel 13.2 Der Satz von Liouville-Arnol’d . . . . . 13.3 Winkel-Wirkungskoordinaten . . . . . . 13.4 Die Impulsabbildung . . . . . . . . . . . 13.5 * Reduktion des Phasenraums . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305 306 309 315 322 330 14 Starre und bewegliche Körper 14.1 Bewegungen des Raumes . . . . . . . . . 14.2 Kinematik starrer Körper . . . . . . . . . 14.3 Lösung der Bewegungsgleichungen . . . . 14.3.1 Kräftefreie Kreisel . . . . . . . . . 14.3.2 Schwere (symmetrische) Kreisel . 14.4 Bewegliche Körper, anholonome Systeme . 14.4.1 Geometrie beweglicher Körper . . 14.4.2 Anholonome Zwangsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343 344 345 351 352 358 361 361 364 15 Störungstheorie 15.1 Bedingt-periodische Bewegung des Torus . . . 15.2 Störungstheorie für eine Winkelvariable . . . . 15.3 Hamiltonsche Störungstheorie erster Ordnung 15.4 KAM-Theorie . . . . . . . . . . . . . . . . . 15.4.1 * Ein Beweis des KAM–Satzes . . . . 15.4.2 Maß der KAM–Tori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367 368 376 379 387 388 399 viii Inhaltsverzeichnis 15.5 Diophantische Bedingung und Kettenbrüche . . . . . . . . . . . 403 15.6 Cantori: Am Beispiel der Standardabbildung . . . . . . . . . . . 408 16 Relativistische Mechanik 16.1 Die Lichtgeschwindigkeit . . . . . . . 16.2 Die Lorentz– und die Poincaré–Gruppe 16.3 Geometrie des Minkowski–Raumes . . 16.4 Die Welt in relativistischer Sichtweise . 16.5 Von Einstein zu Galilei — und zurück 16.6 Relativistische Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411 412 414 419 425 430 435 17 Symplektische Topologie 437 17.1 Das symplektische Kamel und das Nadelöhr . . . . . . . . . . . 438 17.2 Der Satz von Poincaré–Birkhoff . . . . . . . . . . . . . . . . . . 442 17.3 Die Arnol’d–Vermutung . . . . . . . . . . . . . . . . . . . . . . 446 A Topologische Räume und A.1 Topologie und Metrik A.2 Mannigfaltigkeiten . . A.3 Das Tangentialbündel Mannigfaltigkeiten 449 . . . . . . . . . . . . . . . . . . . . . . . 449 . . . . . . . . . . . . . . . . . . . . . . . 457 . . . . . . . . . . . . . . . . . . . . . . . 463 B Differentialformen B.1 Äußere Formen . . . . . . . . . . . . . . B.2 Differentialformen auf dem Rn . . . . . . B.3 Integration von Differentialformen . . . . B.4 Differentialformen auf Mannigfaltigkeiten . B.5 Innere Ableitung und Lie–Ableitung . . . . B.6 Der Satz von Stokes . . . . . . . . . . . . B.7 Das Poincaré–Lemma . . . . . . . . . . . B.8 de-Rham–Kohomologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471 472 477 482 485 486 489 493 497 C Konvexität und Legendre–Transformation 500 C.1 Konvexe Mengen und Funktionen . . . . . . . . . . . . . . . . . 500 C.2 Die Legendre-Fenchel–Transformation . . . . . . . . . . . . . . 501 D Fixpunkt- und Urbildsätze 505 E Gruppentheorie E.1 Gruppen . . . . . . . . E.2 Lie–Gruppen . . . . . . E.3 Lie–Algebren . . . . . . E.4 Lie–Gruppenwirkungen 508 508 511 514 519 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Inhaltsverzeichnis F Bündel, Zusammenhang, Krümmung F.1 Faserbündel . . . . . . . . . . . . . . . . F.2 Zusammenhänge auf Faserbündeln . . . . F.3 Distributionen und der Satz von Frobenius F.4 Holonomie und Krümmung . . . . . . . . ix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522 522 526 532 534 G Morse–Theorie 537 G.1 Morse–Ungleichungen . . . . . . . . . . . . . . . . . . . . . . . 537 G.2 Singuläre Homologie . . . . . . . . . . . . . . . . . . . . . . . . 541 G.3 Geodätische Bewegung und Morse–Theorie . . . . . . . . . . . . 545 H Lösungen der Aufgaben 552 Literaturverzeichnis 609 Namensregister 620 Symboltabelle 622 Abbildungsnachweis 623 Sachregister 624 Bemerkungen zur Mathematischen Physik Motive und Ziele The laws of nature are constructed in such a way as to make the universe as ” interesting as possible.” Freeman Dyson, in Imagined Worlds (1997) In der Mathematischen Physik wird versucht, ausgehend von physikalischen Grundgleichungen und -Annahmen (wie der newtonschen Gleichung, der Boltzmann–Verteilung oder der Schrödinger–Gleichung) physikalische Sachverhalte mathematisch abzuleiten. Im Mittelpunkt steht also das physikalische Problem (zum Beispiel die Frage nach der Stabilität des Sonnensystems, dem Grund für die Existenz von Kristallen oder der Lokalisierung von Elektronen im amorphen Festkörper). Die zur Lösung des jeweiligen Problems benötigten Methoden lassen sich mehrheitlich Analysis oder Geometrie zuordnen, aber auch algebraische Techniken spielen eine Rolle. In grober Zuordnung entspricht mathematisch der • Klassischen Mechanik die Theorie der gewöhnlichen Differentialgleichungen, • der Quantenmechanik die Funktionalanalysis und • der (klassischen) Statistischen Mechanik die Wahrscheinlichkeitstheorie. Zu einem Zyklus über Theoretische Physik gehört aber auch die Elektrodynamik und damit mathematisch gesehen die Theorie der Maxwell–Gleichung, einer linearen partiellen Differentialgleichung. Die Allgemeine Relativitätstheorie, eins der Fundamente der modernen Physik, führt wie viele andere Fragestellungen auf eine nichtlineare partielle Differentialgleichung. Die Quantenfeldtheorie beruht auf einer Vielfalt analytischer, geometrischer wie algebraischer Methoden. Bei dieser Uferlosigkeit des Gebietes stellt sich die Frage, wie es möglich ist, hier in vernünftiger Zeit Boden unter den Füßen zu bekommen, und ob sich die Beschäftigung mit Mathematischer Physik lohnt. Der vorliegende erste Band des geplanten dreibändigen Kurses zur Mathematischen Physik gibt ein Angebot zur ersten Frage. xi xii Bemerkungen zur Mathematischen Physik Die zweite Frage muß jeder für sich entscheiden. Studierende der Mathematik und der Physik haben hier oft unterschiedliche Motive: • In den Kursusvorlesungen der Theoretischen Physik kann ein mathematisch rigoroser Unterbau aus Zeitgründen nicht geschaffen werden. Notgedrungen werden etwa Schrödinger-Operatoren wie endliche Matrizen behandelt. Hier bietet die Mathematischen Physik eine sinnvolle Ergänzung. Der für eine höhere mathematische Genauigkeit zu zahlende Preis besteht darin, dass ein Kurs zur Mathematischen Physik bei Bachelor-regulierter Zeit nicht die gleiche Vielfalt physikalischer Phänomene behandeln kann, wie das in einem Kurs zur Theoretischen Physik möglich ist. Stattdessen werden begriffliche Grundlagen geklärt und exemplarische Modelle untersucht. • Im Mathematik-Studium wird aus gutem Grund eine deduktive Entwicklung mathematischer Begriffe gewählt. Hier kann die problem- und nicht methodenorientierte Mathematische Physik die praktische Relevanz dieser Begriffe motivieren, etwa die dynamische Bedeutung der Spektralanteile eines selbstadjungierten Operators. Ein weiterer Grund für das Interesse an der Mathematischen Physik ist ein Phänomen, das Eugene Wigner zum Titel eines 1960 erschienenen Essays machte, nämlich The Unreasonable Effectiveness of Mathematics in the Natural Sciences” ” Oder mit Albert Einstein: Wie ist es möglich, daß die Mathematik, die doch ein von aller Erfahrung un” abhängiges Produkt des menschlichen Denkens ist, auf die Gegenstände der Wirklichkeit so vortrefflich paßt?” 1 Unmittelbar bezieht sich das Zitat Einsteins auf alle ,Gegenstände der Wirklichkeit’. Aber seine beste Bestätigung findet es in der Physik. Hier weisen mathematische Strukturen (wie die Differentialgeometrie für die Relativitätstheorie oder die Gruppentheorie für die Quantenfeldtheorie) oft vor experimentellen Beobachtungen den Weg zur angemessenen Theorie.2 Dagegen sind etwa in der Biologie als neuer Leitwissenschaft naturhistorisch entstandene Strukturen entscheidend. Auch wenn sich viele Phänomene mathematisch modellieren lassen, ist die Voraussagekraft der Modelle begrenzt. Gleiches gilt in verstärktem Maß etwa für die Wirtschaftswissenschaften. Zwar läßt sich auch die Vielfalt technischer Erfindungen in mathematischer Sprache beschreiben, auch hier wird mehr problem- als methodenorientiert gearbeitet. Ein Unterschied liegt aber in der Zielsetzung. Ziel Mathematischer Physik ist zunächst Erkenntnis von Naturvorgängen, während es in der Technomathematik letztlich um die Simulation und Optimierung von Strukturen und Prozessen geht. 1 A. Einstein: Geometrie und Erfahrung. Festvortrag, gehalten an der Preussischen Akademie der Wissenschaften zu Berlin, am 27. Januar 1921. Berlin: Julius Springer 1921. 2 Dass umgekehrt ,physikalische Beweise’ mathematischer Sachverhalte möglich sind, zeigt auf sehr unterhaltsame Weise das Buch [Lev] von Mark Levi. Bemerkungen zur Mathematischen Physik xiii Inhalte des Buches ,Klassische Mechanik’ Als μηχαν ή (mêchanê) bezeichnet man vorwissenschaftlich im Griechischen ” eine Konstruktion, einen Kunstgriff oder auch einen — illegitimen — Trick. Wenn griechische Staatsverträge hinterlistiges Verhalten ausschließen wollten, verboten sie den Einsatz von τ ´χνη (technê) oder mêchanê, von Hinterlist und Tücke.” [Me], Seite 129 Dies ist der erste Band der geplanten dreibändigen Lehrbuchreihe zur Mathematischen Physik. Die logischen Beziehungen zwischen den Kapiteln dieses Buches werden in erster Näherung durch den folgenden Baum dargestellt. 2: Dynamische Systeme 3: Gewöhnliche Differentialgleichungen 4: Lineare Dynamik 6: Hamiltonsche Gleichungen und Symplektische Gruppe 5: Klassifikation linearer Flüsse 7: Stabilitätstheorie 8: Variationspr. 13: Integrable Systeme 10: Symplektische Geometrie 14: Der starre Körper 9: Ergodentheorie 17: Symplektische Topologie 11: Potentialbew. 16: Relativistik 12: Streutheorie 15: Störungstheorie Einer vierstündigen Vorlesung kann beispielsweise (falls Grundkenntnisse über gewöhnliche Differentialgleichungen vorausgesetzt werden können) die folgende Stoffauswahl zugrunde gelegt werden: • Kapitel 2: Dynamische Systeme • Kapitel 6: Hamiltonsche Gleichungen und Symplektische Gruppe • Kapitel 8: Variationsprinzipien • Kapitel 9: Ergodentheorie • Kapitel 10: Symplektische Geometrie • Kapitel 13: Integrable Systeme Ergänzend zu den Anhängen dieses Buches sei das Taschenbuch der Mathematik [Zei] von Eberhard Zeidler [Hg] empfohlen. xiv Bemerkungen zur Mathematischen Physik Inhalte der Lehrbuchreihe Die geplante Lehrbuchreihe eignet sich als Basis einer dreisemestrigen vierstündigen Vorlesung zur Mathematischen Physik, wie sie an mehreren deutschsprachigen Universitäten angeboten wird. Mit dieser Beschränkung des Stoffes ist eine Integration in das Lehrangebot der Mathematik oder der Physik realisierbar. Zusätzlich sind die drei Bände weitgehend unabhängig voneinander, wodurch sie leichter in eine andere Unterrichtsplanung integriert werden können. Explizit vorausgesetzt werden nur die Vorlesungen zur Analysis und zur Linearen Algebra. Anhänge fassen die wichtigsten Voraussetzungen etwa aus Differentialgeometrie, Gruppentheorie, Topologie und Wahrscheinlichkeitstheorie zusammen. Essentials etwa aus der Theorie gewöhnlicher Differentialgleichungen oder der Funktionalanalysis werden an Ort und Stelle eingeführt. Bei entsprechenden Vorkenntnissen können die entsprechenden Kapitel ausgelassen werden. Die Bände eignen sich auch zum Selbststudium. Die geplante Lehrbuchreihe kann vorhandene Literatur wie etwa die bekannten vierbändigen Werke ,Methods of Modern Mathematical Physics’ von M. Reed und B. Simon oder ,Lehrbuch der Mathematischen Physik’ von W. Thirring nicht ersetzen. Während Ersteres wegbereitend für die Mathematisierung der Quantenmechanik war, spannte das zweite Werk einen Bogen von den Grundgleichungen bis zum Beweis von Eigenschaften physikalisch realistischer Modelle. Es wird hier ein etwas geringeres mathematisches Ausgangsniveau vorausgesetzt, gleichzeitig aber versucht, die Breite aktueller Fragestellungen abzubilden und Voraussetzungen für das Verständnis spezialisierterer Literatur zu schaffen. Die durch einen Stern (*) gekennzeichneten Kapitel sind mathematisch anspruchsvoller, werden aber im Weiteren nicht vorausgesetzt. Die (in diesem Band über 100) Übungsaufgaben werden teilweise durch Lösungstipps ergänzt, denn sie variieren stark in ihrem Schwierigkeitsgrad. In einem Anhang findet man die Lösungen. Die (für den vorliegenden Band etwa 340) Illustrationen sind – soweit möglich – quantitativ exakt. Danksagung Die geplante Lehrbuchreihe hat ihren Ursprung im Vorlesungszyklus ,Mathematische Physik’, der von Ruedi Seiler am Fachbereich Mathematik der TU Berlin etabliert wurde. Ihm verdanke ich und verdankt die Lehrbuchreihe sehr viel. Robert Schrader, der am Fachbereich Physik der FU Berlin meine Diplomarbeit und Dissertation betreute, hat meine Sicht der Mathematischen Physik entscheidend geformt. Ich danke Frau Irmgard Moch, die in detektivischer Arbeit meine Handschrift entzifferte und dieses Buch schrieb. Christoph Schumacher hat unter Anderem mehrere Aufgaben beigetragen. Viviane Baladi, Tanja Dierkes, Jacques Féjoz, Herbert Lange, Zhiyi Tang, Stefan Teufel, Stephan Weis sowie zahlreiche weitere Kolleginnen und Kollegen fanden Fehler im Manuskript oder trugen anderweitig zu seiner Verbesserung bei. Frau Herrmann und Herrn Heine vom Springer–Verlag danke ich für ihre freundliche Hilfe bei der Veröffentlichung des Buches. Alle Fehler gehen natürlich auf mein Konto. Für entsprechende Hinweise bin ich dankbar. Erlangen, im Mai 2011, A.K. Bemerkungen zur Mathematischen Physik xv Zur Notation Teilmengen: Sind A und B Mengen, dann heißt A Teilmenge von B (in Zeichen A ⊆ B), wenn gilt: x ∈ A ⇒ x ∈ B. Insbesondere gilt B ⊆ B. Die echte Inklusion A B bedeutet, dass A ⊆ B, aber A = B gilt. In der mathematischen Literatur findet man auch das Teilmengenzeichen A ⊂ B. Dies benutzen wir statt ⊆ als Hinweis auf eine echte Teilmenge. Potenzmengen: Ist A eine Menge, dann ist die Potenzmenge von A 2A := {B | B ⊆ A}. Synonym findet man auch die Notationen P(A) und P(A). Funktionen: Für f : M → N und A ⊆ M ist f (A) := {f (a) | a ∈ A}. Für B ⊆ N ist f −1 (B) := {m ∈ M | f (m) ∈ B}. Für b ∈ N ist f −1 (b) := f −1 ({b}). Zahlen: Menge N = {1, 2, . . .} der natürlichen Zahlen, N0 = {0, 1, 2, . . .}, Ring Z = {0, 1, −1, 2, −2, . . .} der ganzen Zahlen. Körper Q, R, C der rationalen, reellen beziehungsweise komplexen Zahlen. Für einen Körper K bedeutet K∗ die multiplikative Gruppe K∗ := K \ {0}, und R+ := {x ∈ R | x > 0} = (0, ∞). Intervalle: Für a, b ∈ R, a < b ist (a, b) := {x ∈ R | x > a, x < b} , (a, b] := {x ∈ R | x > a, x ≤ b} etc. (Synonym findet man auch die Notation ]a, b[= (a, b), ]a, b] = (a, b] etc.) Matrizen: Mat(m × n, K) bezeichnet den K–Vektorraum der m × n–Matrizen mit Einträgen aus dem Körper K, und Mat(n, K) den Ring Mat(n × n, K). Sphären und Kugeln: Für d ∈ N0 ist S d := {x ∈ Rd+1 | x = 1} = ∂B d+1 , also Rand der abgeschlossenen Vollkugel Brd := {x ∈ Rd | x ≤ r} vom Radius r > 0, und B d := B1d . Wir schreiben S 1 ⊂ C für {c ∈ C | |c| = 1}, aber auch S 1 := R/Z (mit der Identifikation [x] → exp(2πix)) für die multiplikative bzw. additive Gruppe. Das griechische Alphabet: a) Kleinbuchstaben α β γ δ , ε Alpha Beta Gamma Delta Epsilon ζ η θ,ϑ ι κ Zeta Eta Theta Jota Kappa λ μ ν ξ o Lambda My Ny Xi Omikron π ρ, σ,ς τ υ Pi Rho Sigma Tau Ypsilon φ, ϕ χ ψ ω Phi Chi Psi Omega Ω Omega b) Großbuchstaben (soweit verschieden von den lateinischen) Γ Δ Gamma Delta Θ Λ Theta Lambda Ξ Π Xi Pi Σ Υ Sigma Ypsilon Φ Ψ Phi Psi xvi Bemerkungen zur Mathematischen Physik Kleines Englisch-Wörterbuch abelian absolute value acceleration accumulation point angular momentum area assertion associativity as. completeness asymptotic value average ball barycenter bifurcation billiard bound bounded box bundle cardinality cartesian product centroid chain rule circle closed complete conditionally periodic connected connection constraint continuity convergent convolution countable covering critical point critically damped cross section curvature degree derivative disjoint disk distance divergent domain empty set equilibrium equivalence class escape time expectation value fibre field fixed point flow force forced oscillation friction function golden ratio/mean graph group group action ill-posed abelsch Betrag Beschleunigung Häufungspunkt Drehimpuls Fläche Aussage Assoziativität as. Vollständigkeit Grenzwert Mittelwert Vollkugel Schwerpunkt Verzweigung Billard Schranke beschränkt Würfel Bündel Mächtigkeit kartesisches Produkt Schwerpunkt Kettenregel Kreislinie abgeschlossen vollständig bedingt-periodisch zusammenhängend Zusammenhang Zwangsbedingung Stetigkeit konvergent Faltung abzählbar Überlagerung Ruhelage; kr. Punkt Aperiodischer Grenzfall Wirkungsquerschnitt Krümmung Abbildungsgrad Ableitung disjunkt Kreisscheibe Abstand divergent Definitionsbereich leere Menge Ruhelage Äquivalenzklasse Fluchtzeit Erwartungswert Faser Körper Fixpunkt Fluss Kraft erzwungene Schwingung Reibung Funktion Goldener Schnitt Graph Gruppe Gruppenwirkung schlecht gestellt image imaginary part imgaginary unit inequality initial condition intersection interval inverse mapping limit linking number manifold map measure metric metric space mixing moment of inertia momentum monotonous neighborhood numbers - complex - integer - irrational - natural - rational - real one-to-one onto open order overdamped partition proposition power series power set primes principal bundle proper map real part relation residue class ring root scattering section semicontinuous sequence set sign solution speed stable subsequence subset theorem time delay time reversal triangle inequality underdamped union unit velocity well defined Bild Imaginärteil imaginäre Einheit Ungleichung Anfangsbedingung Durchschnitt Intervall Umkehrabbildung Limes Verschlingungszahl Mannigfaltigkeit Abbildung, Karte Maß Metrik metrischer Raum mischend Trägheitsmoment Impuls monoton Umgebung Zahlen - komplexe - ganze - irrationale - natürliche - rationale - reelle injektiv surjektiv offen Ordnung Kriechfall Zerlegung Satz Potenzreihe Potenzmenge Primzahlen Hauptfaserbündel eigentliche Abb. Realteil Relation Restklasse Ring Wurzel Streuung Schnitt halbstetig Folge Menge Signum Lösung Betrag der Geschw. stabil Teilfolge Teilmenge Satz Zeitverzögerung Zeitumkehr Dreiecksungleichung Schwingfall Vereinigung Einheit Geschwindigkeit wohldefiniert Kapitel 1 Einleitung Newtons eigenes Exemplar der ersten Auflage seines Buches Philosophiae Naturalis Principia Mathematica, mit handschriftlichen Korrekturen für die zweite Auflage. Wie alles anfing Und nachdem ihm gesagt worden war, er möge die Wahrheit sagen, sonst ” werde man zur Folter schreiten, Antwortete er: Ich bin hier, um Gehorsam zu leisten, und ich habe besagte Meinung nach der getroffenen Entscheidung nicht aufrechterhalten”. Gerichtsprotokoll des Heiligen Offiziums der Inquisition zum Fall Galilei (1633) 1 Gut fünfzig Jahre vergingen zwischen Galileis Verurteilung und dem Erscheinen der Principia Newtons. In dieser Zeit etablierte sich die moderne Naturforschung, mit der Klassischen Mechanik als Leitwissenschaft. Wir beginnen diese 1 Zitiert nach Sobel [Sob2], Seite 289. A. Knauf, Mathematische Physik: Klassische Mechanik, Springer-Lehrbuch Masterclass, c Springer-Verlag Berlin Heidelberg 2012 DOI 10.1007/978-3-642-20978-9 1, 1 2 1. Einleitung Einführung mit der Lösung der Bewegungsgleichung für die Planeten, also der Bestätigung und Präzisierung des heliozentischen Weltbilds von Galileo Galilei. Sowohl die Untersuchung von Differentialgleichungen als auch die physikalisch begründete Himmelsmechanik gehen auf Isaac Newton (1643–1727) zurück. • Der Mathematiker Newton ist (zusammen mit Leibniz) als Begründer der Differentialrechnung bekannt. • Der Physiker Newton gab dem Gesetz Kraft = Masse × Beschleunigung (1.1) seinen Namen. Diese beiden Tätigkeitsfelder Newtons hängen miteinander zusammen. Ist nämlich • x(t) ∈ R3 der Ort eines Massenpunktes zur Zeit t ∈ R, dann sind (in 3 Newtons Schreibweise für Zeitableitungen) ẋ(t) = dx dt (t) ∈ R seine Ged2 x 3 schwindigkeit und ẍ(t) = dt2 (t) ∈ R seine Beschleunigung zu diesem Zeitpunkt. • Andererseits kann die Kraft F von Ort und Geschwindigkeit des Teilchens und auch direkt von der Zeit abhängen, sodass Gleichung (1.1) die Form F (x, ẋ, t) = mẍ besitzt. Dabei ist die Kraftfunktion F als bekannt vorausgesetzt. Dies ist ein Beispiel einer Differentialgleichung, denn es handelt sich um eine Gleichung, die von der gesuchten, hier vektorwertigen Funktion t → x(t) und ihren Ableitungen erfüllt wird. Beispielsweise wirkt auf die Erde (mit demMittelpunkt 2 bei x, der Masse m > 0, und mit der euklidischen Norm x = x21 + x22 + x23 ) die Kraft F (x) = −mγ x x 3 wobei vereinfachend vorausgesetzt wird, dass die Sonne im Ursprung des Koordinatensystems ruht. Eine genauere Behandlung zeigt, dass sich das echte 2–Körperproblem, bei dem Erde und Sonne sich um ihren gemeinsamen Schwerpunkt bewegen, auf das diskutierte x ∈ R3 \{0} , (1.2) Kraft Sonne Geschwindigkeit Erde Schwerpunkt 2 In Aufgabe 12.37 auf Seite 289 wird gezeigt, dass für eine zentralsymmetrische Masseverteilung die Gravitation so wirkt, als ob die Masse im Mittelpunkt konzentriert wäre. 1. Einleitung 3 Zentralkraftproblem reduzieren lässt, wenn man statt der Erdmasse m die reduzierte Masse mM/(m + M ) einsetzt 3 . Die positive Konstante γ ist das Produkt von Gravitationskonstante und Sonnenmasse. Gleichung (1.1) besitzt hier also nach Kürzung durch m die Form x ẍ = −γ x 3 . (1.3) Newton löste diese Differentialgleichung und leitete damit die bisher nur empirisch aus den Beobachtungsdaten abgelesenen keplerschen Gesetze der Planetenbewegung aus dem mechanischen Grundgesetz (1.1) und (1.2) ab. Dies war der erste Triumph der neuen Naturwissenschaft — 1687 in seinem Hauptwerk Philosophiae naturalis principia mathematica”(kurz: Principia) [Ne] ” veröffentlicht. Newton war sich der Bedeutung seiner Erkenntnis bewusst, und da er außer zu Mathematik und Physik auch zum Geheimnisvollen und Mystischen neigte, verschlüsselte er einen lateinischen Satz in einem Anagramm4 . Der Satz lautete, frei übersetzt: Es ist nützlich, Differentialgleichungen zu lösen.” ” Ableitung der keplerschen Gesetze Wir wollen Newtons Rat folgen und (1.3) lösen. 1. Als erstes stellen wir fest, dass der Planet für alle Zeiten in der durch seinen Anfangsort und seine Anfangsgeschwindigkeit aufgespannten Bahnebene 5 bleibt, denn x×x d [x × ẋ] = ẋ × ẋ + x × ẍ = ẋ × ẋ − γ = 0, dt x 3 (1.4) der auf dieser Ebene senkrechte Vektor x(t) × ẋ(t) ∈ R3 ist also zeitlich konstant. 2. Nun ist es nützlich, den Ort x(t) in dieser Bahnebene durch eine komplexe Zahl z(t) zu beschreiben, wobei z(t) := x1 (t) + ix2 (t), falls ohne Einschränkung x × ẋ in 3–Richtung weist. Damit ist in Polarkoordinaten z(t) = r(t)eiϕ(t) , also ż = (ṙ + i rϕ̇)eiϕ und z̈ = r̈ − rϕ̇2 + i(2ṙϕ̇ + rϕ̈) eiϕ . Nach Division durch eiϕ und Trennung von Real- und Imaginärteil führt die newtonsche Kraftgleichung z̈ = −γ |z|z 3 damit zu den beiden verkoppelten 3 Siehe Beispiel 12.39 auf Seite 291. nach der Einleitung des Buches [Ar3] von Arnol’d. Interessante biographische Notizen zu Newton findet man in [Ar6]. 5 Falls ẋ parallel zu x ist, erhalten wir statt einer Ebene eine Gerade. 4 Zitiert 4 1. Einleitung reellen Differentialgleichungen (I): r̈ − rϕ̇2 + γ =0 , r2 (II): 2ṙϕ̇ + rϕ̈ = 0. (1.5) d 3. Wegen dt (r2 ϕ̇) = r(2ṙϕ̇ + rϕ̈) = 0 ist := r2 ϕ̇ = const eine Konstante der Bewegung. Die Multiplikation dieser Größe mit der Masse m des Planeten ergibt definitionsgemäß den Drehimpuls. Dieser ist also zeitlich konstant. 4. Substitution von ϕ̇ = /r2 in (I) ergibt die Gleichung r̈ − γ 2 + 2 = 0. r3 r Auch hier lässt sich eine Konstante der Bewegung finden, denn mit 2 γ und H (r, ṙ) := 12 ṙ2 + U (r) − 2r2 r 2 d ist dt H r(t), ṙ(t) = ṙ r̈ − r3 + rγ2 = 0, sodass H zeitlich konstant ist: H r(t), ṙ(t) = H r(0), ṙ(0) =: E. Physikalisch wird E m als die Gesamtenergie des Planeten interpretiert, und alle reellen Zahlen treten als Energiewerte auf. U (r) := 5. Nun sind wir zunächst weniger an der Lösung der Differentialgleichung ṙ = ± 2(E − U (r)), (1.6) also der Zeitabhängigkeit des Radius interessiert, als an der Bahnform R(ϕ) := r(t(ϕ)). Wir können zu ϕ als unabhängiger Variable übergehen, wenn wir voraussetzen, dass = r2 ϕ̇ = 0 ist. Dann ergibt sich aus (1.6) ±R2 dR ṙ = = dϕ ϕ̇ 2(E − U (R)) oder durch Separation der Variablen und Einsetzen von U dR = dϕ = ϕ − ϕ0 . ±R 2ER2 + 2γR − 2 Mit den Konstanten e := 1 + der linken Seite umformen: 2E2 γ2 und p := 2 /γ lässt sich der Integrand p/R = . 2 2 2 2 e R − (p − R)2 R 2ER + 2γR −