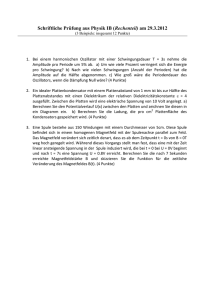
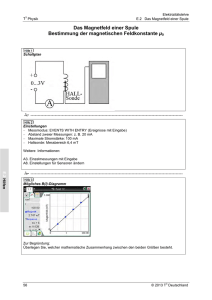
Magnetfeldkontrolle in der Einzelionfalle
Werbung

Magnetfeldkontrolle in der Einzelionfalle Bachelorarbeit zur Erlangung des akademischen Grades Bachelor of Science im Studiengang Physik der Naturwissenschaftlich-Technischen Fakultät II -Physik und Mechatronikder Universität des Saarlandes vorgelegt von: Matthias Kreis Saarbrücken, Juni 2013 Ich versichere hiermit, dass ich die vorliegende Arbeit selbstständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel benutzt habe. Ort, Datum Matthias Kreis 3 Inhaltsverzeichnis 1. Einleitung 7 2. Regelung einer gegebenen Größe 9 3. Konstruktion einer Messschaltung 3.1. Der Magnetfeldsensor . . . . . . . . . 3.2. Instrumentenverstärkerschaltung . . . 3.3. Die Messverstärkerschaltung . . . . . 3.4. Erzeugung von präzisen Spannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 11 12 13 16 4. Vermessung des Sensors 4.1. Kalibrierung der Magnetfeldmessung . . . 4.2. Bestimmung der maximalen Auflösung . . 4.3. Frequenzabhängigkeit der Messschaltung . 4.4. Langzeitstabilität der Magnetfeldmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 17 18 23 23 5. Aufbau einer Regelschleife 5.1. Variation des P Anteils . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Variation des I Anteils . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3. Untersuchungen zu verschiedenen Störfeldern. . . . . . . . . . . . . . . . 29 29 32 32 6. Magnetfeldstabilisierung an der Teilchenfalle 37 7. Fazit 43 A. Anhang A.1. Schaltplan des Reglers . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.2. Schaltplan der Messverstärkerschaltung . . . . . . . . . . . . . . . . . . . A.3. Ramsey Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 45 45 47 Literaturverzeichnis 49 Danksagungen 51 . . . . . . . . 5 1. Einleitung In der Forschung zur Quanteninformation werden unter anderem Experimente an einzelnen Ionen durchgeführt [1, 2]. Die einzelnen Zustände der Elektronen eines Ions bilden dabei die Quantenbits (auch Qbits). Um die Zustände zur Erzeugung eines Qbits spektroskopisch aufzulösen werden dazu bei einem Ion, wie zum Beispiel 40 Ca+ , mit einem externen Magnetfeld die Zeeman-Niveaus des Atoms aufgespalten. In dem entstehenden Termschema wird dann auf einem atomaren Übergang ein Superpositionszustand erzeugt. Dies stellt ein Qbit dar. Die Zeit, die der Superpositionszustand dieses Qbits erhalten bleibt, ist für weitere Experimente in diesem Bereich sehr wichtig. Diese Kohärenzzeit kann mit einem sogenannten Ramsey-Experiment [3, 4, 5] bestimmt werden. Anhand dieses Experiments kann gezeigt werden, dass bei Magnetfeldschwankungen die Kohärenzzeit zurückgeht und die in dem Qbit gespeicherte Information verloren geht. Störungen des Magnetfeldes werden vor allem durch elektrische Geräte und Aufbauten in der Nähe des Atoms verursacht. Bei näheren Untersuchungen fällt insbesondere ein Anteil bei 50 Hz auf, welcher sogar in dem Ramsey-Experiment sichtbar wird. Dieser wird verursacht durch das Stromnetz, welches die elektrischen Geräte an der Teilchenfalle versorgt. Durch eine Ramsey-Messung können die Magnetfeldstörungen auf etwa 500 µG abgeschätzt werden. Ziel dieser Arbeit ist es eine aktive Stabilisierung eines Magnetfeldes zu erarbeiten, welche in der Lage ist, die Magnetfeldstörungen, allen voran die 50 Hz Störung an der Teilchenfalle zu beseitigen. Um das Magnetfeld zu stabilisieren wird eine Regelung mit einem zweiten Magnetfeld konstruiert, welche die Störungen kompensiert. Dazu ist es nötig das Magnetfeld zuverlässig und mit ausreichender Auflösung zu messen, sowie eine Regelung zu entwickeln, welche eine Kompensationsspule steuert. 7 2. Regelung einer gegebenen Größe Ziel einer Regelung ist es, eine Regelgröße auf einen vorgegebenen Wert zu bringen und dort zu halten. Ein schematischer Aufbau soll am Beispiel der Regelung eines Magnetfeldes erläutert werden. Es wird dabei der Formalismus aus [7] benutzt. Abbildung 2.1 stellt einen Regelkreis dar. Mit einem Sensor und Verstärkerschaltung (Messglied) wird der aktuelle Wert (Regelgröße) des Magnetfeldes gemessen und in Form einer Spannung ausgegeben. Dieser Wert wird mit y(t) bezeichnet. Diese Regelgröße wird mit einem Sollwert w(t), auch Führungsgröße genannt, verglichen. In dem Fall der Magnetfeldregelung ist der Sollwert als Spannung gegeben. Die Differenz e(t) = w(t) − y(t) wird Regelabweichung genannt. Aus dieser Regelabweichung wird mit einer Regeleinrichtung, hier mit einer PI-Regelschaltung, eine Stellgröße u(t) = f (e(t)) erzeugt. Die Stellgröße soll die Regelgröße so verändern, dass sie den Sollwert annimmt. Im konkreten Fall wird die Stellgröße in einen Strom umgewandelt, der eine Spule (Regelstrecke) betreibt. Mögliche Störgrößen sind zum Beispiel Rauschen oder Einschaltverhalten der Spule. Aus der Überlagerung der Magnetfeldschwankungen im Raum und dem erzeugten Magnetfeld der Spule ergibt sich der neue Wert der Regelgröße. Im Folgenden werden verschiedene Regler vorgestellt. Diese sind der P - Regler, I - Regler sowie PI - Regler. Der P - Regler ist der einfachste vorstellbare Regler. Dabei wird die Regelabweichung um einen Faktor KP verstärkt ausgegeben. Für die Stellgröße ergibt sich: u(t) = KP e(t) (2.1) Vorteil eines P - Reglers ist eine direkte Reaktion auf eine Regelabweichung, Nachteil ist, dass immer eine endliche Abweichung bestehen bleibt. Ein Regler bei dem dies nicht der Fall ist, ist der I - Regler. Dieser integriert über die Regelabweichungen und gibt das Ergebnis um einem Verstärkungsfaktor KI verstärkt als Stellgröße aus: Z t u(t) = KI e(τ )dτ (2.2) 0 Abbildung 2.1.: Schematischer Aufbau eines Regelkreises 9 2. Regelung einer gegebenen Größe C R2 e(t) OpAmp1 R1 u(t) OpAmp2 L R3 GND GND Abbildung 2.2.: Schmatischer Aufbau eines Regelkreises zu Magnetfeldregelung. Wenn eine konstante Regelabweichung vorliegt, wird die Stellgröße immer größer. Dies hat zur Folge, dass der I - Regler in der Lage ist eine Regelabweichung zu beseitigen. Ein I - Regler hat den Nachteil der langsamen Reaktion auf eine Regelabweichung. Deshalb kombiniert man den P und I Anteil zu einem PI - Regler. Dieser vereint die Vorteile von P- und I-Regler, ohne die Nachteile mitzubringen. Er reagiert schneller auf eine Regelabweichung und hinterlässt keine bleibende Regelabweichung. Als Stellgröße eines PI - Reglers ergibt sich: u(t) = KP e(t) + KI Z t e(τ )dτ (2.3) 0 In dieser Arbeit wird ein PI- Regler verwendet, da er alle notwendigen Eigenschaften mitbringt. Der Regler wird mit einer Operationsverstärkerschaltung aufgebaut. Nachgeschaltet wird ein zusätzlicher Operationsverstärker, der den benötigten Strom liefert. Abbildung 2.2 (erstellt mit EAGLE 6.4.0) zeigt die in der Arbeit verwendete Regelschaltung. Der Operationsverstärker OpAmp1 fungiert dabei als Regler. Die Werte von KP sowie KI lassen sich über über die Widerstände R1, R2 sowie den Wert des Kondensators C einstellen. GND bezeichnet die Erdung. Man erhält als Stellgröße: 1 Zt R2 e(t) + e(τ )dτ u(t) = R1 R1 · C 0 (2.4) Ein zweiter Operationsverstärker (OpAmp2 ) wandelt dieses Signal in einen Strom um, welcher durch eine Spule L fließt. Ein Widerstand R3 begrenzt den Stromfluss und dient gegebenenfalls als Messwiderstand. Da der Operationsverstärker OpAmp2 nur einen begrenzten Strom liefern kann, begrenzt dies zusammen mit den Eigenschaften der Spule das Magnetfeld, welches ausgeregelt werden kann. Die Induktivität der Spule kann nicht beliebig groß gewählt werden, da mit steigendem L immer mehr Einschaltvorgänge in der Spule, sowie der Blindwiderstand der Spule zum Tragen kommt, und der Regelkreis damit zu träge wird, d.h. ein Tiefpassverhalten entwickelt. 10 3. Konstruktion einer Messschaltung Da Magnetfelder im Bereich von mehreren 100 µG stabilisiert werden sollen, ist eine Schaltung zu konstruieren, die diese auflösen kann. Des weiteren soll es möglich sein, konstante Magnetfelder, wie zum Beispiel das Erdmagnetfeld, oder das Magnetfeld einer Spule, aber auch durch die Eigenschaften der Bauteile verursachte Spannungsverschiebungen mittels eines Offsets abzuziehen. Da die zu erreichende Auflösung in der Nähe der maximalen Auflösegrenze des verwendeten Magnetfeldsensors liegt, ist auf eine rauscharme Konstruktion zu achten. 3.1. Der Magnetfeldsensor Es wurde ein Magnetfeldsensor von der Firma SENSITEC, der AFF755B [9], verwendet. Der Sensor arbeitet mit dem anisotropen magnetoresistiven Effekt (AMR-Effekt), welcher erstmalig im Jahre 1857 durch William Thomson bei Eisen und Nickel beschrieben wurde [6]. Er beruht auf der Änderung des elektrischen Widerstandes in Abhängigkeit eines externen Magnetfeldes. In Abbildung 3.1 ist das verwendete Schaltbild, eine schematische Darstellung sowie die Belegung der Anschlüsse des Sensors zu sehen. In dem Schema des Sensors ist die Messrichtung des Magnetfeldsensors eingetragen. Diese liegt parallel zu den mit 1 bis 4 bezeichneten Anschlüssen. Die Anschlüsse sind wie folgt belegt. An Anschluss 4 und Anschluss 6 liegt die Versorgungsspannung des Sensors an einer Wheatstone-Brücke an. Die Widerstände dieser Wheatstone-Brücke sind aus einem Material mit AMR-Effekt und erzeugen eine magnetfeldabhänige Spannung die an Anschluss 2 und Anschluss 5 abgegriffen werden kann. An Anschluss 1 und Anschluss 8 kann ein sogenannter „Flip Strom“ angelegt werden. Dieser richtet die Magnetisierung Pinning 8 7 6 5 direction of magnetic field MAGN1 1 2 3 4 +IF -VOUT ITESTA GND -IF ITESTB VCC +VOUT 8 7 6 5 Į Į = 0° AFF755B-MAGNETIC 1 2 3 4 Top view Fig. 11: AFF755B shown with magnetic field direction. (a) (b) Pin Symbol 1 +IF 2 -Vout Parameter Flip coil Negative output voltage 3 Itest 4 GND 5 +Vout Positive output voltage 6 VCC Supply voltage 7 Itest Test connector 8 -IF Flip coil Test connector Ground Fig. 11: AFF755B sho Pin 1 is marked by a point on housing. (c) Abbildung 3.1.: Verwendetes Schaltbild (a), Abbildung aus dem Datenblatt (b) und Belegung der Anschlüsse (c) des AFF755B. 11 3. Konstruktion einer Messschaltung u1 OpAmp1 R2 R3 R1 OpAmp3 out R R1 OpAmp2 R2 R3 off u2 Abbildung 3.2.: Schematischer Aufbau einer Intrumentenverstäerkerschaltung mit drei Operationsverstärkern der Widerstände wieder aus. Dieser „Flip Strom“ wurde nicht aktiv genutzt, sondern nur bei Bedarf. An Anschluss 3 und Anschluss 7 kann ein Strom angelegt werden um ein Test Magnetfeld anzulegen. Diese Anschlüsse blieben während der Arbeit ungenutzt. Das maximale Auflösevermögen des Sensors ist mit 20 µG angegeben. Die Sensitivität S5V ist im Mittel mit S5V = 5,9683µV/mG bei einer Versorgungsspannung usup = 5 V angegeben. Bei dieser Spannung wurde der Sensor betrieben. Das Rauschen des Sensors lässt sich abschätzen über: q (3.1) ur = N · ∆f . Dabei bezeichnet ur die Rauschspannug, N den Rauschpegel, welcher dem Quadrat der Rauschspannungsdichte entspricht, und ∆f die Bandbreite der Schaltung (vgl. [8] 207ff). Im Folgenden wird mit einer Bandbreite von 1000 Hz gerechnet. Diese Bandbreite ist groß genug um eine 50 Hz Störung zuverlässig zu messen, aber so klein das die Auflösung noch den Anforderungen entspricht. Mit einer größeren Bandbreite steigt nach Gleichung 3.1 auch das Rauschen an. Man erhält für die Rauschspannung des Sensors: ur,s ≈ 316 nV. Dies entspricht einem Magnetfeld von 53 µG. Mit einer Verstärkerschaltung, deren Rauschen um einiges geringer ist als das Sensorrauschen, ist es somit möglich 100 µG aufzulösen. Dies soll mit einer Instrumenterverstärkerschaltung realisiert werden. Die Betrachtungen dazu, sowie die Rechnungen für den Verstärkungsfaktor wurden aus [8] entnommen. 3.2. Instrumentenverstärkerschaltung Als Instrumentenverstärker bezeichnet man eine Schaltung aus drei Operationsverstärkern, wie sie in Abbildung 3.2 zu sehen ist. u1 sowie u2 bezeichnen die beiden Ein- 12 3.3. Die Messverstärkerschaltung gänge der Schaltung, out den Spannungsausgang. Der Instrumentenverstärker gibt die Spannungsdifferenz zwischen u2 und u1 am Ausgang bezüglich eines Niveaus, das bei off gegeben werden kann, aus. OpAmp1 und OpAmp2 bilden die erste Verstärkerstufe, OpAmp3 arbeitet als einfacher Differenzverstärker. Für die Spannung am Ausgang ergibt sich: R3 2 · R1 · · (u2 − u1) − uof f (3.2) uout = 1 + R R2 In der Berechnungsformel für die Ausgangsspannung wird schon ein Vorteil eines Instrumentenverstärkers deutlich. Die Verstärkung der Schaltung lässt sich über einen der Widerstände einstellen. Eine weitere Eigenschaft von Instrumentenverstärkern ist der hohe Eingangswiderstand der Schaltung, da die Eingänge der Schaltung mit den nicht invertierenden Eingängen der Operationsverstärker verbunden sind. Dadurch werden Geräte vor dem Instrumentenverstärker (wie z.B. Messsensoren) kaum belastet, da kein Strom in die Instrumentenverstärkerschaltung hinein fließen kann. Darüber hinaus besitzen Instrumentenverstärker eine gute Gleichspannungsunterdrückung, das heißt wenn sich an beiden Eingängen die Spannung um den selben Wert ändert, ändert sich die Spannung am Ausgang nicht bzw. nur sehr gering. Die Gleichspannungsunterdrückung ist ein Maß für diese Änderung. Wegen der guten Eigenschaften sind Instrumentenverstärker in integrierter Form erhältlich, bei denen die Verstärkung über einen externen Widerstand eingestellt werden kann. In der Arbeit wurde kein integrierter Instrumentenverstärker verwendet, da bei diesen die Verstärkung zum großen Teil in der ersten Verstärkerstufe stattfindet. Da die Ausgangsspannungen des Sensors jedoch bei 0, 5usup ± usig ≈ 2, 5 V ± usig (3.3) liegen, wobei usig das zu verstärkende Signal, usup die Versorgungsspannung bezeichnet, kann es passieren, dass bei zu großer Verstärkung vor dem Differenzverstärker die Spannung bis in den Anschlag ansteigt, und damit das Signal verloren geht. Zusätzlich weisen die meisten integrierten Instrumentenverstärker ein zu großes Rauschen auf, wodurch die maximal zu erreichende Auflösung sinkt. 3.3. Die Messverstärkerschaltung Die Messverstärkerschaltung hat die Aufgabe, das Signal des Sensors zu verstärken, ohne dabei die Auflösung durch zu starkes Rauschen zu begrenzen. In der Schaltung muss es möglich sein, einen Offset einzustellen, um ein konstantes Magnetfeld zu kompensieren. Im Folgenden sollen die einzelnen Elemente der Schaltung nacheinander vorgestellt werden. Im Anhang ist ein vollständiger Schaltplan zu finden, mit dem die Platine erstellt wurde. Als Verstärker für die Messverstärkerschaltung wurden Verstärker vom Typ LT1208 von LINEAR TECHNOLOGY [10] verwendet. In Abbildung 3.3 wird die Messverstärkerschaltung dargestellt. Um eine gute Lesbarkeit des Schaltplans zu wahren, wurde auf die Versorgungsspannungen (±12 V) verzichtet. An jedem Verstärker wurde am Eingang der positiven sowie negativen Versorgungsspannung jeweils ein Kondensator mit 100 nF und 22 µF Kapazität platziert. Diese Kondensatoren 13 LT1028 560 LT1028 - 82 OpAmp3 560 + 56k 3.3k + GND - 330 + 68p - OpAmp4 OpAmp5 OpAmp2 POT2 3.3k 1k GND -UOFF POT1 +UOFF 1k Abbildung 3.3.: Schaltung zur Verstärkung des Sensorsignals 14 68p + 56k 3.3k 68p 470 OpAmp1 LT1028 GND 330 - 470 -IF ITESTB VCC +VOUT LT1028 + +IF -VOUT ITESTA GND MAGN1 Usup AFF755B-MAGNETIC 3. Konstruktion einer Messschaltung OUT 3.3. Die Messverstärkerschaltung ermöglichen es dem Verstärker bei Bedarf direkt Strom zu entziehen. Ohne Kondensatoren an den Versorgungsspannungsanschlüssen kann es passieren, dass der Verstärker anfängt zu schwingen. Die eingezeichneten Kondensatoren an den Verstärkern OpAmp1 bis OpAmp4 bilden jeweils einen Tiefpass, welcher die Bandbreite der Schaltung auf etwa 1 kHz begrenzt. Die Verstärker OpAmp1 bis OpAmp4 dienen zur Verstärkung des Sensorsignal. Der Verstärkungsfaktor berechnet sich zu 3300 2 · 470 ≈ 125 · 82 330 v3 = 1 + (3.4) hinter dem Verstärker OpAmp3, und im Gesamten zu: vges = v3 · 56000 ≈ 12500 560 (3.5) Der Verstärker OpAmp5 dient zum Einstellen eines Offsets, um konstante Magnetfelder zu kompensieren. Dazu wird mit dem Potentiometer POT1 eine Spannung zwischen +UOFF = 10 Volt und -UOFF = -10 Volt eingestellt. Dies dient als grobe Einstellung. Das Potentiometer POT2 verändert die Verstärkung an OpAmp5 um dem Faktor 1 bis 1.33 und wird zur Feineinstellung der Offsetspannung benutzt. Zusammen mit der Verstärkung an OpAmp3 kann damit das Magnetfeld berechnet werden, das kompensiert werden kann. Es berechnet sich zusammen mit der Sensitivität des Sensors zu: |Bkom | = 13, 3 V |U OF F | · 1, 33 = 17, 7 G. ≈ mV S5V · v3 6 G · 125 (3.6) Damit kann das Magnetfeld am Ion, das zwischen 3 und 6 Gauss beträgt, kompensiert werden. Die Gesamtsensitivität des Sensors berechnet sich bei 5 Volt Versorgungspannung zu: mV Sges = vges · S5V = 74, 7 . (3.7) mG Damit bleibt nur noch das Rauschen der Schaltung zu betrachten. Es wird abgeschätzt mit dem Programm LTSPICE. Mit diesem können elektrische Schaltungen simuliert werden. Die Simulation liefert eine Rauschspannungsdichte uf r (f ) bezogen zum Eingang der Schaltung. Mit dieser lässt sich die Rauschspannung berechnen. s ur,v = Z 1 kHz 0 uf r (f )df = 56 nV (3.8) Das Rauschen aus der Verstärkerschaltung ist also um den Faktor 6 kleiner wie das Rauschen des Sensors. Insgesamt ergibt sich für die Rauschspannung bezogen auf das Eingangssignal q (3.9) ur,ges = u2r,s + u2r,v ≈ 321 nV. Die Schaltung liefert also verglichen mit dem Sensor wenig Rauschen, womit die gewünschte Auflösung erreicht wird. 15 3. Konstruktion einer Messschaltung GND +12V 10V +12V K 330 -12V POT1 5V GND DIOD1 AFF755B-MAGNETIC (a) A DIOD3 K -IF ITESTB VCC +VOUT A +IF -VOUT ITESTA GND A K DIOD2 470 MAGN1 330 10V UOFF (b) Abbildung 3.4.: Schaltungen zur Erzeugung präziser Spannungen. A bezeichnet die Anode, K die Kathode der Zenerdiode. Die Durchbruchsspannung ist an der Diode angegeben. 3.4. Erzeugung von präzisen Spannungen Zusätzlich zu der Spannungsversorgung der Verstärker werden drei weitere verschiedenen Spannungen benötigt. Eine dieser Spannung versorgt den Sensor und zwei dienen als Spannungsquelle für den Offset des Magnetfeldes. Die Konstanz dieser Spannungen ist von großer Bedeutung, da Schwankungen in diesen verstärkt in die Ausgangsspannung der Schaltung eingehen. Als Spannungsreferenzen werden Zenerdioden (LM4040 von TEXAS INSTRUMENTS [12]) benutzt. In Abbildung 3.4 (a) ist der Versorgungskreislauf des Sensors abgebildet. Es wurde eine Zenerdiode mit 5 V Durchbruchspannung gewählt. Diese lässt die Spannungsdifferenz zwischen der Eingangsspannung und der Durchbruchspannung durch die Diode „abfließen“. An der Anode der Diode kann eine Spannung von 5V abgegriffen werden. Der Widerstand dient dazu den durch die Diode fließenden Strom zu begrenzen. Mit einer ähnlichen Schaltung wird die Offsetspannung erzeugt. Diese Schaltung ist in Abbildung 3.4 (b) zu sehen. Die Funktionsweise ist ähnlich zu der Versorgungsschaltung des Sensors. Allerdings wurden die Widerstände etwas angepasst, um den fließenden Strom in dem im Datenblatt der Diode angegebenen Bereich zu halten. Am Ausgang UOFF kann eine Spannung zwischen 10 und -10 Volt durch das Potentiometer POT1 eingestellt werden. 16 4. Vermessung des Sensors Nachdem der Sensor mit Messverstärker entworfen und gebaut wurde ist zu prüfen ob die errechneten Eigenschaften, wie zum Beispiel das Auflösevermögen mit den tatsächlichen Eigenschaften übereinstimmen. Deshalb wird eine Kalibrierung des Sensors vorgenommen, um die Sensitivität der Messschaltung zu bestimmen. Danach wird das Auflösevermögen mithilfe des Rauschens bestimmt. Weiter wird auf die Frequenzabhänigkeit des Sensors sowie das Langzeitverhalten eingegangen. 4.1. Kalibrierung der Magnetfeldmessung Um die Magnetfeldmessung des Sensors zu kalibrieren ist es notwendig ein Magnetfeld bekannter Stärke zu erzeugen. Dies geschieht mit einer Spule mit bekannten Abmessungen. Den benötigten Strom liefert ein Verstärker (LT1886 von LINEAR TECHNOLOGY [11]). Abbildung 4.1 zeigt die verwendete Schaltung. Der Verstärker dient dazu ein am Eingang (EIN ) der Schaltung gegebenes Signal in einen Strom umzuwandeln. Um verschiedene Magnetfelder am Ort des Sensors zu erhalten wird bei verschiedenen Abständen zwischen Spule und Sensor das angelegte mit dem gemessenen Magnetfeld verglichen. Der durch die Spule fließende Strom wird währenddessen nicht variiert. Abbildung (4.2) zeigt ein Foto des Versuchsaufbaus. Um unabhängig von Magnetfeldänderungen während der Messungen zu sein, wurde nicht ein konstantes Magnetfeld angelegt, sondern mit einem Funktionengenerator verschiedene Signalformen (z.B eine 60 Hz Rechteckspannung) erzeugt. Es wurde die Spannungsdifferenz zwischen dem Maximalsowie Minimalwert gemessen, und daraus das „gemessene“ Magnetfeld bestimmt. An dem Messwiderstand wurde der Spannungsabfall gemessen, daraus der fließende Strom und damit zusammen mit dem Abstand der Spule das „angelegte“ Magnetfeld berechnet. Abbildung 4.3 enthält zwei Bilder wie sie zur Kalibrierung des Magnetfeldes entstanden sind. Das angelegte Magnetfeld wurde berechnet mit dem Biot-Savart Gesetz für eine stromdurchflossene Leiterschleife: r2 µ0 I (4.1) Ban = n 2 (r2 + d2 ) 23 Dabei bezeichnet I den Strom durch die Spule, r = 0, 0781 m den Radius der Spule, d den gemessenen Abstand zum Magnetfeldsensor, n = 17 die Windungszahl und µ0 = 4π · 10−7 AN2 die magnetische Vakuumpermeabilität. Das gemessene Magnetfeld wurde aus der Spannnungsdifferenz und der Sensitivität des Sensors mit Verstärkerschaltung bestimmt: Umess Bmess = (4.2) Sges 17 4. Vermessung des Sensors 1k EIN 1k LT1886 L 39 GND GND Abbildung 4.1.: Erzeugen eines Magnetfeldes zur Magnetfeldkalibrierung. Der 39 Ω Widerstand dient zur Strombegrenzung und gleichzeitig als Messwiderstand. Die erhaltenen Werte für das aus dem Abstand berechnete, „angelegte“ Magnetfeld, sowie das „gemessene“ Magnetfeld sind in Tabelle 4.1 eingetragen, und in Abbildung 4.4 graphisch dargestellt. Aus einer linearen Anpassung ergibt sich ein Verhältnis zwischen angelegtem und gemessenen Magnetfeld von: Bmess = 1, 048(4) Ban (4.3) Im Datenblatt des Sensors ist für die Sensitivität ein typischer Wert von 15 mV/V angegekA/m ben, bei maximaler Sensitivität von 17 mV/V und minimaler Sensitivität von 13 mV/V . Dies kA/m kA/m entspricht möglichen Abweichungen von 13%. Das gemessene Verhätlnis von 1,048(4) liegt in diesem Rahmen. Für die Sensitivität des Sensors mit dem Kalibrierungsfaktor ergibt sich aus den gemessenen Daten: Smess = 71, 524 mV mG (4.4) Dieser Wert für die Sensitivität wird im folgenden benutzt um Spannungen in Magnetfelder umzurechnen. Es ergibt sich: 100 mV entsprechen 1,4180 mG. 4.2. Bestimmung der maximalen Auflösung Nach der Kalibrierung der Messschaltung soll die maximale Auflösung bestimmt werden. Dazu wird über eine Zeit von 100 Sekunden das Sensorsignal mit 10 kS/s ohne extern angelegtes Magnetfeld mit einem Oszilloskop (LECROY) aufgenommen. Aus diesem Signal 18 4.2. Bestimmung der maximalen Auflösung Abbildung 4.2.: Versuchsaufbau zur Kalibrierung des Magnetfeldes. Mit der Spule links wird ein Magnetfeld erzeugt. Das Lineal dient zur Abstandsmessung. (a) Messung bei 18 cm Abstand der Spule (b) Messung bei 26 cm Abstand der Spule Abbildung 4.3.: Messung der Spannungsdifferenz bei verschiedenen Spulenabständen 19 4. Vermessung des Sensors Abstand [m] 0, 06 0, 10 0, 14 0, 18 0, 22 0, 26 0, 30 0, 35 0, 40 0, 45 angelegtes Magnetfeld [mG] 139, 97 65, 457 32, 456 17, 701 10, 510 6, 683 4, 488 2, 899 1, 975 1, 403 gemessenes Magnetfeld [mG] 146, 53 67, 217 32, 264 17, 208 10, 755 6, 453 4, 033 2, 689 1, 748 0, 941 Tabelle 4.1.: Erhaltene Werte zur Kalibrierung der Verstärkerschaltung. g e m e s s e n e s M a g n e tfe ld [m G ] 1 6 0 1 4 0 1 2 0 1 0 0 8 0 6 0 4 0 2 0 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 0 a n g e le g te s M a g n e tf e ld [m G ] Abbildung 4.4.: Erhaltene Werte von gemessenem Magnetfeld aufgetragen gegen das angelegte Magnetfeld. 20 4.2. Bestimmung der maximalen Auflösung 1 x 10 -3 Leistungsdichte [V²/Hz] 0.8 0.6 0.4 0.2 50 00 10 00 20 00 50 0 20 0 10 0 50 20 10 5 2 1 0 Frequenz [Hz] Abbildung 4.5.: Leistungsdichte (Power Spectral Densitiy) des Sensorrauschens. wird das Spektrum des Signals bestimmt. Es ist in Abbildung 4.5 dargestellt. Das gut erkennbare Maximum bei 50 Hz findet seine Ursache in der Netzspannung des öffentlichen Stromnetzes. Durch Integration erhält man die Standardabweichung des Rauschens (vgl. Gleichung 3.8). u2r = Z 1 kHz P SD(f )df (4.5) 0 Dabei bezeichnet ur die Standardabweichung der Rauschspannung, P SD(f ) die frequenzabhängige Leistungsdichte. Die maximale Auflösung um ergibt sich aus um = 2ur . Diese Werte sowie die Leistungsdichte wurden numerisch mit MATLAB aus den gemessenen Werten bestimmt. Es ergibt sich für die maximale Auflösung 65,6 mV, was einem Magnetfeld von 918 µG entspricht. Dies ist etwas mehr als die angestrebte Auflösung. Mögliche Gründe für zu großes Rauschen sind in einer ungenügenden Abschirmung der Verstärkerschaltung gegen äußere Einflüsse und in dem Rauschen der Zenerdioden, welche zur Erzeugung der Offset Spannung genutzt werden, zu suchen. Um dies zu überprüfen kann das Rauschen aus der Instrumentenverstärkerschaltung mit dem Rauschen welches aus der Offsetspannungerzeugung kommt verglichen werden. Ist das Rauschen der Offsetspannung größer als das Rauschen der Instrumentenverstärkerschaltung geht dadurch Auflösevermögen verloren. Um dies zu beheben wurde zwischen das Potentiometer 21 4. Vermessung des Sensors 1 x 10 -3 Leistungsdichte [V²/Hz] 0.8 0.6 0.4 0.2 50 00 10 00 20 00 50 0 20 0 10 0 50 20 10 5 2 1 0 Frequenz [Hz] Abbildung 4.6.: Leistungsdichte des Sensorrauschen nach Ergänzung des Tiefpasses. und dem nicht invertierenden Eingang der Verstärkerschaltung ein zusätzlicher Tiefpass aus einem 56 kΩ Widerstand und einem 22 µF Kondensator geschaltet. Die Grenzfrequenz dieses Tiefpasses liegt bei ungefähr 0,1 Hz. Da die Offsetspannung konstant ist kann ein Tiefpass mit einer so niedrigen Frequenz gewählt werden. In Abbildung 4.6 ist die mit einer erneuten Messung aufgenommene Leistungsdichte des Rauschspektrums aufgetragen. Man erkennt das im niedrigen Frequenzbereich das Rauschen abnimmt, da manche Spitzen verschwinden oder kleiner werden (zum Beispiel bei ungefähr 6, 8 und 12 Hertz). Diese Abnahme schlägt sich auch direkt in der erreichbaren Auflösung wieder. Diese verbessert sich auf 40 mV was einem Magnetfeld von 560 µG entspricht. Um die Herkunft des Rauschen weiter zu klären wurden Spektra der Leistungsdichte am invertierenden und nicht invertierenden Eingang der letzten Verstärkerstufe aufgenommen. Die erhaltenen Spektra sind zum Vergleich in Abbildung 4.7 abgebildet. Sie sind sich sehr ähnlich. Der große Wert bei etwa 60 Hz in beiden Spektren ist ungewöhnlich, vor allem da er in dem Spektrum hinter diesem Verstärker nicht mehr auftaucht. Auch ist der Wert bei 50 Hz überraschend niedrig. Ein systematischer Fehler wird nicht vermutet, kann jedoch nicht ausgeschlossen werden. Weiter ist zu erkennen das die Werte am invertierenden Eingang etwas größer sind. Dies schlägt sich in der Rauschspannung an den Eingängen wieder. Am invertierenden Eingang beträgt sie 1,6 mV am nicht inver- 22 4.3. Frequenzabhängigkeit der Messschaltung x 10 -7 1 -7 Frequenz [Hz] 50 00 50 0 10 00 20 00 20 0 50 10 0 1 50 00 50 0 10 00 20 00 20 0 50 10 0 20 0 5 0 10 0.2 2 0.2 20 0.4 5 0.4 0.6 10 Leistungsdichte [V²/Hz] 0.8 0.6 1 Leistungsdichte [V²/Hz] 0.8 x 10 2 1 Frequenz [Hz] (a) Leistungsdichte des Rauschens am invertieren- (b) Leistungsdichte des Rauschens am nicht inverden Eingang tierenden Eingang Abbildung 4.7.: Rauschen an den Eingängen der Letzten Verstärkerstufe tierenden Eingang 1,2 mV. Um eine bessere Auflösung zu erreichen muss demnach unter anderem das Rauschen der Offsetspannung weiter reduziert werden. 4.3. Frequenzabhängigkeit der Messschaltung Als nächstes wird die Frequenzabhängigkeit der Messschaltung überprüft. Dazu wird die magnetfelderzeugende Spule im Abstand von 16 cm zum Sensor aufgestellt. An die Spule wird ein sinusförmiges Signal mit verschiedenen Frequenzen angelegt. Da mit steigender Frequenz auch der Blindwiderstand der Spule zunimmt wird der fließende Strom und das erzeugte Magnetfeld gemessen. Aus den erhaltenen Werten kann das Verhältnis von angelegtem Magnetfeld zu gemessenen Magnetfeld berechnet werden. Die Werte sind auf den Wert bei 1 Hz normiert in Abbildung 4.8 dargestellt. Es ist erkennbar, dass ab etwa 3 kHz die Messschaltung nicht mehr den vollen gemessenen Wert überträgt, sondern eine Dämpfung des Signals stattfindet. Es konnte nur bis 100 kHz gemessen werden, da ab diesem Wert der Stromfluss aufgrund des Blindwiderstandes der Erzeugerspule zu gering wurde um noch ein gut messbares Magnetfeld zu erhalten. 4.4. Langzeitstabilität der Magnetfeldmessung Während eines Experiment mit aktiver Regelung am Ion wie in Kapitel 6 beschrieben wurde ein Problem bei der Langzeitstabilität der Magnetfeldmessung festgestellt. Es handelt sich dabei um ein Driften der Messverstärkerschaltung. Abbildung 4.9 enthält 23 4. Vermessung des Sensors 1 ,0 0 ,8 V e r h ä ltn is 0 ,6 0 ,4 0 ,2 0 ,0 1 1 0 1 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 0 0 F re q u e n z [H z ] Abbildung 4.8.: Frequnezabhängigkeit der Messschaltung, normiert auf den Wert bei 1 Hz. 24 4.4. Langzeitstabilität der Magnetfeldmessung Abbildung 4.9.: Driften der Messverstärkerschaltung an der Falle. Es sind 500 s gemessen worden. Die obere Spur enthält den Spannungsabfall an einem Messwiderstand an der Regelspule. Die untere Spur enthält das mit dem Sensor gemessene Magnetfeld. die Messung die durchgeführt wurde, um dieses Driften zu untersuchen. Die Messung ist in 2 Teile gegliedert. Im ersten Teil der Messung, ungefähr bis zur Hälfte der aufgenommenen Zeit, ist die Regelung aktiviert. Es ist zu erkennen, dass das Sensorsignal komplett ausgeregelt wird. Der Stromfluss durch die Regelspule ändert sich allerdings kontinuierlich. Der zweite Teil der Messung wurde bei abgeschalteter Regelung durchgeführt. Wie erwartet fließt kein Strom durch die Regelspule und das Sensorsignal ändert sich langsam. Aus der Messung geht hervor, das das Sensorsignal um etwa 400 mV, was etwa 5,6 mG enspricht, schwankt. Da mit diesen Schwankungen keine Verbesserung des Magnetfeldes am Ion zu erwarten ist müssen diese beseitigt werden. Mögliche Gründe für die Schwankungen sind zu suchen in • dem Erwärmen der Widerstände, • Spannungsschwankungen in der Sensorversorgungsspannung, • Schwankungen des Offset. Im Folgenden sollen diese möglichen Ursachen erläutert, und ihre Auswirkungen auf die Ausgangsspannung abgeschätzt werden. Begonnen wird mit dem Erwärmen der Widerstände. Die verwendeten Widerstände besitzen einen Temperaturkoeffizient von 100 ppm/K. Damit können die Schwankung des Widerstandes und daraus die Schwankung in der Verstärkerschaltung berechnet werden. Es wird nur die Instrumentenverstärkerschaltung betrachtet, da Schwankungen in dieser nochmal um den Faktor 100 verstärkt werden. Für die Schwankungen in der Instrumen- 25 4. Vermessung des Sensors tenverstärkerschaltung erhält man mit der Temperaturschwankung ∆T : v + ∆v = 124, 63 ± 0, 0479 · ∆T. (4.6) Bei einem angelegten Magnetfeld von etwa 300 mG (dies entspricht in etwa der Stärke des Erdmagnetfeldes [14, 15]) erhält man damit Schwankungen der Ausgangsspannung von V (4.7) ∆U = 100S5V · B · ∆v · ∆T = 14, 29 · ∆T mV = 14, 29 . K Bei Temperaturschwankungen von einem Kelvin gehen diese in dem Rauschen der Verstärkerschaltung unter. Des weiteren erwärmt sich der Sensor nach dem Einschalten. Er kommt jedoch nach einer gewissen Zeit in ein Gleichgewicht. Ab diesem Zeitpunkt treten kaum noch Temperaturschwankungen auf. Somit können diese als Ursache ausgeschlossen werden. Als nächste Ursache werden Schwankungen in der Versorgungsspannung des Sensors untersucht. Diese verändern die Sensitivität und damit bei gleichem Magnetfeld den gemessenen Wert. Auch diese Schwankungen gehen verstärkt ein. Die Sensitivität des Sensors beträgt: µV/V (4.8) S0 = 1, 19366 mG Die Zener Diode hat eine Genauigkeit der Ausgangsspannung von 0,012%, dies entspricht einer Spannungsschwankung ∆u von 600 µV bei 5 V Versorgungsspannung. Damit ergibt sich für Schwankungen in der Sensitivität: ∆S = S0 ∆u = 0, 000736 µV/V . mG (4.9) Dies ergibt zusammen mit der Verstärkung und dem Magnetfeld an der Falle (es hat eine Stärke von etwa 3 G) Schwankungen von 27 mV. Diese Schwankungen sind kleiner als die maximale Auflösung der Verstärkerschaltung. Somit scheidet diese Möglichkeit auch aus. Damit bleiben noch Schwankungen aus dem Offset. Ursache können Schwankungen in der Spannungsversorgung des Potentiometers sowie des Widerstandverhätlnisses durch erwärmen oder mechanische Beeinflussung sein. Im Gegensatz zu den anderen beiden Quellen können diese Schwankungen direkt am Offsetpotentiometer gemessen werden. Abbildung 4.10 enthält bei der Messung entstandene Bilder. Abbildung 4.10 (a) enthält das Driften des Offsetpotentiometers (obere Kurve) sowie ein zweites Potentiometer anderer Bauart (untere Kurve). Man erkennt bei beiden Schwankungen von etwa 5 mV, welcher zusammen mit dem Verstärkungsfaktor die Schwankungen von 400 mV erklären können. Das Offsetpotentiometer scheint also die Ursache für die Schwankungen zu sein. Als Möglichkeit um die Schwankungen in der Ausgangsspannung zu beseitigen werden zwei einfache Festwiderstände getestet, die als Spannungsteiler geschaltet werden. Die Ergebnisse dieser Messung sind in Abbildung 4.10 (b) zu sehen. Es ergibt sich keine Verbesserung der Schwankungen. Als weitere Lösungsmöglichkeit wurde eine andere Erzeugung der Offsetspannung getestet. Dazu wurde ein Schaltung (vgl. Abbildung 4.11) benutzt, die eine feste Spannung 26 4.4. Langzeitstabilität der Magnetfeldmessung (a) (b) Abbildung 4.10.: Driften von (a) Spannungsteiler. Potentiometern 1k -2,5V und (b) Widerständen als POTI,10k OpAmp1 2,7k Uoff GND Abbildung 4.11.: Schaltung zur Erzeugung einer Offsetspannung zwischen 1 und 10 V. 27 4. Vermessung des Sensors 2 ,2 0 6 5 -0 ,0 4 2 ,2 0 6 4 -0 ,0 6 A u s g a n g s s p a n n u n g [V ] O ffs e ts p a n n u n g [V ] 2 ,2 0 6 3 2 ,2 0 6 2 2 ,2 0 6 1 2 ,2 0 6 0 2 ,2 0 5 9 2 ,2 0 5 8 -0 ,0 8 -0 ,1 0 -0 ,1 2 -0 ,1 4 2 ,2 0 5 7 2 ,2 0 5 6 -0 ,1 6 2 ,2 0 5 5 3 0 4 0 5 0 Z e it [m in ] (a) 6 0 7 0 8 0 0 1 2 3 4 5 6 7 8 9 1 0 1 1 1 2 1 3 1 4 1 5 1 6 1 7 Z e it [h ] (b) (c) Abbildung 4.12.: Langzeitverhalten von Offsetspannung (a) sowie Magnetfeldsensor über mehrere Stunden (b) und wenige Minuten (c). verstärkt und damit eine Offsetspannung im Bereich von 1 bis 10 V ermöglicht. Die Spannung von -2,5 V wird mit einer vorgeschalteten Diode erzeugt (LT1009 von LINEAR TECHNOLOGY [13]). Das Erzeugen der Offsetspannung mit diese Methode bietet 2 Vorteile gegenüber der zuerst angewendeten in Abbildung 3.4 (b) dargestellten Methode. Zum einen verändert sich die Spannung bei einer Drehung des Potentiometers (es besitzt 10 Umdrehungen) nur um 0,9 statt um 2 V, wodurch das Offset genauer eingestellt werden kann und mögliche mechanisch verursachtete Schwankungen verringert werden. Des weiteren fließt durch das Potentiometer ein viel geringerer Strom, weswegen es weniger anfällig gegen Erwärmung durch eben diesen ist. Um die Stabilität der Offsetspannung zu überprüfen, wurde diese etwa eine Stunde mit einem Wert pro Sekunde gemessen. Die erhalten Werte sind in Abbildung 4.12 (a) zu sehen. Aus dieser Messung erhält man eine Stabilität der Offsetspannung im Bereich von etwa 10 µV. Die starken Schwankungen zu Beginn sind durch externe Störungen (Wackeln an der Platine) entstanden. Mit der Verstärkung in der letzten Stufe sind diese Schwankungen immer noch geringer als das Rauschen des Sensors. Nachdem die Stabilität des Offsets gewährleistet ist wurde eine Langzeitmessung des Ausgangssignals der Messschaltung durchgeführt. Dazu wurde über Nacht das Sensorausgangssignal jede Sekunde gemessen. Die gemessenen Werte finden sich in Abbildung 4.12 (b). Besonders interessant ist der Bereich zwischen 2,5 und 12,5 Stunden. Dies entspricht Urzeiten von 20:00 Uhr bis 6:00 Uhr. In diesem Bereich wird die kleinste Beeinflussung von außen erwartet. Auch findet zu dieser Zeit kein Experementierbetrieb in den Laboren statt, und in der Werkstatt laufen keine Maschinen. Es kann deshalb von einem konstanten Magnetfeld ausgegangen werden und es wird ein tatsächlicher Drift gemessen. Die Messung liefert ein Drift von etwa 40 mV. Dies ist weniger als das Rauschen des Sensors, ist somit auf kurzer Zeitskala nicht zu erkennen. Zusätzlich zu dem Driften auf langer Zeitskala wurde auch eine kürzere Zeitskala betrachtet. Diese ist in Abbbildung 4.12 (c) zu sehen. Es ist ein Zeitraum von 500 Sekunden erfasst worden. In diesem Zeitraum bleibt das Sensorsignal fast konstant. Damit ist das Problem des Offsetdriften so weit gelöst, dass eine Messung am Ion durchgeführt werden kann. 28 5. Aufbau einer Regelschleife Mit dem vermessenen Sensor soll eine Regelschleife aufgebaut werden. Dazu wird die in Abbildung 2.2 abgebildete Schaltung genutzt. Mit R1, R2 sowie C können verschiedene Werte für den P (KP ) bzw. den I (KI ) Anteil der Regelung eingestellt werden (vgl. dazu Gleichung (2.3) und (2.4)). Der Verstärker OpAmp2 wird als invertierender Verstärker, mit Verstärkungsfaktor 1 (es wurden 4 1 kΩ Widerstände benutzt) und einem zusätzlichen 472 pF Kondensator, um ein Tiefpassverhalten zu erreichen, geschaltet. Als Verstärker wird ein LT1886 von LINEAR TECHNOLOGY verbaut. Dieser enthält 2 Operationsverstärker, wodurch ein Bauteil für die Schaltung ausreicht. Die Spule wurde aus einem 68 Pol SCSI Kabel gebaut. Dazu wurde an beiden Seiten des Kabels Steckverbindungen angebracht. An einer Seite ist die Steckverbindung um ein Kabelstrang zur Seite verschoben. Dadurch wird das Kabel beim Zusammenstecken zur Spule. Der Vorteil dieser Methode besteht darin, dass sich die Spule leicht an der Teilchenfalle montieren lässt. Es wird der Durchmesser der Spule gemessen,und daraus der Radius der Spule zu r = 5, 75 cm bestimmt. Die Breite des Kabels beträgt etwa 4,3 cm. Der Abstand der Regelspule beträgt ungefähr 15 cm. Mit diesem Abstand und dem maximalen Strom, den der Verstärker liefern kann (Im = 100 mA ) ergibt sich das maximale Magnetfeld, das kompensiert werden kann zu: Bm = Im · 68 · µ0 r2 3 (r2 + d2 ) 2 ≈ 24 mG. (5.1) Dieser Wert ist groß genug, um die erwarteten Schwankungen zu kompensieren. Abbildung 5.1 zeigt den Versuchsaufbau wie er zur Vermessung der Regelschaltung benutzt wird. Wenn nicht anders angegeben beträgt der Abstand der Regelspule sowie der Störspule 15 cm. Die Regelschaltung wird auf einem Steckbrett aufgebaut, um die Widerstände sowie den Kondensator, welche die Regelparameter KP sowie KI festlegen, variieren zu können. 5.1. Variation des P Anteils Zuerst soll der Einfluss des KP Anteils auf die Regelung untersucht werden. Dazu wird der Wert von R1 = 8, 2 kΩ, sowie C = 6, 8 nF gesetzt. Der Wert von R2 wird variiert um verschiedene Werte für KP zu erhalten. Für KI ergibt sich KI = 17934 s−1 . Als Störung wird ein Rechteckmagnetfeld mit 60 Hz angelegt. Dazu wird die selbe Anordnung wie zur Sensorvermessung benutzt. Mit einem Oszilloskop werden Bilder aufgenommen, aus denen dann ungefähr der Spannungswert a0 direkt nach einem Magnetfeldsprung (es 29 5. Aufbau einer Regelschleife Abbildung 5.1.: Versuchsaufbau zur Vermessung der Regelschaltung mit der Messchaltung in der Mitte. Links befindet sich die Spule die zur Erzeugung des Störfeldes benutzt wird. Die Regelspule ist rechts zu sehen. KP 0, 122 0, 268 1 2, 68 4, 76 12, 2 122 a0 [V] 1, 25 1, 15 0, 9 0, 6 0, 4 0, 3 0, 2 τ [ms] 0, 4 0, 4 0, 5 0, 6 1 1 10 Tabelle 5.1.: Erhaltene Werte für die Parameter der Sprungantwort bei verschiedenen P Anteilen. Dabei bedeutet 10 ms das die Störung nicht ausgeregelt werden kann bevor diese sich wider ändert. wurde das erste Pixel ignoriert) sowie die Zeit τ bis die Störung komplett ausgeregelt ist, bestimmt werden können. Abbildung 5.2 enthält Aufnahmen wie sie zum Untersuchen des P Anteils entstanden sind. Man kann gut die Sprungantwort des Reglers erkennen. Auch die Auswirkungen des P Anteils auf den Regler können erkannt werden. Die erhaltenen Werte für a0 sowie τ für verschiedene KP bei festem KI = 17934 s−1 sind Tabelle 5.1 zu entnehmen. Aus diesen Werten kann man entnehmen, dass mit größerem Wert für KP die Abweichung vom Sollwert direkt nach einem Sprung in der Störung kleiner ist. Es ist jedoch auch zu erkennen, dass der Wert nicht beliebig groß gewählt werden kann, da bei dem größten benutzen Wert von KP eine Regelabweichug vorhanden bleibt (vgl. Abbildung 5.2 (d)). Dies kommt vermutlich daher, dass bei zu großem Widerstand (in diesem Fall 1 MΩ) der Stromfluss zu dem Kondensator so stark gehemmt ist, dass dieser quasi nicht vorhanden ist. Ein weiteres Problem bei zu großem P Anteil ist, dass der Regelkreis anfangen kann zu schwingen. Um dies zu zeigen wurde für KP = 6, 83 sowie KI = 1786 s−1 der Abstand d der Regelspule zum Sensor variiert. Die erhaltenen Bilder sind in Abbildung 5.3 dargestellt. Bei zu kleinem Abstand zwischen Regelspule 30 5.1. Variation des P Anteils (a) KP = 0, 122 (b) KP = 1 (c) KP = 2, 68 (d) KP = 122 Abbildung 5.2.: Reaktionen des Reglers auf eine Rechteckstörung bei verschiedenen Werten für KP . Kanal 1 stellt das Magnetfeld am Ort des Sensors dar (1 V ≈ 14 mG). In Kanal 2 ist das angelegte Magnetfeld zu sehen (1 V ≈ 3,5 mG). (c) enthält die Messweise für a0 , (b) für τ . (a) d = 15 cm (b) d = 10,5 cm (c) d = 8 cm Abbildung 5.3.: Regelung von verschiedenen Störmagnetfeldern, mit dem selben Regelkreis und verschiedenem Abstand. 31 5. Aufbau einer Regelschleife und Sensor fängt die Regelschaltung an zu schwingen. Durch eine zu große Verstärkung wegen des geringen Abstandes der Regelspule schaukeln sich spontane Schwankungen, wie zum Beispiel durch Rauschen verursacht, auf. Bei geeigneter Wahl von KP sowie KI fängt selbst bei dem in diesem Versuchsaufbau minimal möglichen Abstand zwischen Regelspule und Sensor die Schaltung nicht an zu schwingen. Nach diesen Betrachtungen existiert eine obere Grenze für den Wert von KP . Doch auch für den unteren Wert gibt es eine Grenze. Diese erhält man aus Überlegungen zu einen ständig wechselnden Störung, wie zum Beispiel einer sinusförmigen Störung. Ohne P Anteil wird die Störung kaum oder gar nicht geregelt, da der I Anteil alleine zu langsam regelt. Aus diesem Grund wird der P Anteil mit KP = 1,22 (R1 = 8,2 kΩ; R2 = 10 kΩ) gewählt. 5.2. Variation des I Anteils Da der I Anteil für eine komplette Ausregelung der Störung zuständig ist, wird erwartet, dass die Zeit, bis keine Störung mehr vorhanden ist, in Zusammenhang mit dem Wert von KI steht. Um dies zu überprüfen wird bei festem KP = 0,122 der Wert von KI verändert. Die Reaktion des Reglers auf diese Variation ist in Abbildung 5.4 zu sehen. Wie erwartet nimmt mit kleinerem Wert von KI die Zeit τ zu, die es dauert bis die Störung beseitigt ist. Bei zu kleinem Wert von KI ist der Regler nicht mehr in der Lage die Störung vollständig zu eliminieren bevor sich die Störung ändert (siehe 5.4 (d)). Es findet also auch keine vollständige Ausregelung mehr statt. Aus diesen Beobachtungen kann geschlossen werden, das ein größerer Wert von KI von Vorteil ist. Wählt man den Wert allerdings zu groß kommt es erst zu Überschwingen, und bei weiterer Vergrößerung von KI fängt der Regelkreis schließlich komplett an zu schwingen. Dies ist in Abbildung 5.5 (a) - (d) zu sehen. Die Wahl von KI ist also nach oben und nach unten limitiert. Nach unten dadurch, dass eine Störung im Bereich von 50 Hz ausgeregelt werden soll, und nach oben dadurch, dass der Regelkreis anfängt zu schwingen. Für den I Anteil wird ein Wert von KI = 12195 s−1 (R1 = 8,2 kΩ; C = 10 nF) gewählt. 5.3. Untersuchungen zu verschiedenen Störfeldern. Nach den Überlegungen zur Wahl des P sowie I Anteils wird die Regelung bei verschiedenen Störfeldern betrachtet. Dazu wird ein Rechteck-, Dreiecks-, sowie sinusförmiges Magnetfeld als Störfeld erzeugt. Dies ist auch bei verschiedenen Frequenzen geschehen. Die bei dieser Messung entstandenen Bilder sind in Abbildung 5.6 dargestellt. Die Bilder (a), (b) und (c) sind bei einer Störung mit einer Frequenz von 60 Hertz entstanden. Man kann erkennen, dass in allen 3 Fällen die Störung fast komplett ausgeregelt ist. Bei einer Frequenz von 500 Hz sind jedoch schon Unterschiede erkennbar ((d) bis (f)). Bei der Rechteckstörung gibt es weniger Zeiten zu denen die Störung komplett ausgeregelt ist. 32 5.3. Untersuchungen zu verschiedenen Störfeldern. (a) KI = 12195 s−1 (b) KI = 3127 s−1 (c) KI = 1220 s−1 (d) KI = 370 s−1 Abbildung 5.4.: Reaktionen des Reglers auf eine Rechteckstörung bei verschiedenen Werten für KI . Kanal 1 stellt das Magnetfeld am Ort des Sensors dar (1 V ≈ 14mG). In Kanal 2 ist das angelegte Magnetfeld zu sehen (1 V ≈ 3,5 mG). 33 5. Aufbau einer Regelschleife (a) KI = 121951 s−1 (b) KI = 217770 s−1 (c) KI = 677507 s−1 (d) KI = 1793400 s−1 Abbildung 5.5.: Bei zu großer Wahl von KI fängt der Regelkreis an zu schwingen. 34 5.3. Untersuchungen zu verschiedenen Störfeldern. (a) (b) (c) (d) (e) (f) Abbildung 5.6.: Reaktion des Reglers auf verschiedene Störfeldformen. Bei der Dreieck sowie Sinusstörung kann man erstmals eine deutlichere Regelabweichung erkennen. Auch gibt es bei der Sinusstörung eine kleine Phasenverschiebung. Dies zeigt nochmals die Wichtigkeit des P Anteils der Regelung. Der Regler soll hauptsächlich eine Störung mit 50 Hz Frequenz ausregeln. Dies findet, wie in den Bildern 5.6 zu sehen ist, statt. Somit können die Regelparameter wie sie bei dieser Messung benutzt wurden für die Regelung an der Teilchenfalle benutzt werden. 35 6. Magnetfeldstabilisierung an der Teilchenfalle Um die Auswirkungen der Regelung auf das Magnetfeld am Ion zu überprüfen wird der Regelkreis an der Teilchenfalle angebracht. Bei der Montage wird darauf geachtet, dass der Sensor möglichst fest sitzt um Schwankungen des gemessenen Magnetfeldes durch Wackeln des Sensors zu minimieren. Abbildung 6.1 enthält ein Foto der Regelung an der Teilchenfalle. Nach Anbringen des Regelkreises an der Teilchenfalle wird die Messchaltung aktiviert und der Offset eingestellt, um das Magnetfeld an der Falle zu kompensieren und die Schwankungen als Schwankungen um den Nullpunkt zu messen. Nach einer Wartezeit wird das Offset nachgestellt. Dies ist notwendig, da sich die Messschaltung nach dem Einschalten erwärmt und es dadurch zu einem Driften kommt. Dieser Prozess wird so lange wiederholt bis das gemessene Feld nicht mehr driftet und das Offset damit endgültig eingestellt werden kann. Für die Offsetspannung sind 4,9 V nötig, um das Zeeman-Magnetfeld zu kompensieren. Das gemessene Magnetfeld kann dabei auf einem Oszilloskop beobachtet werden. Mit eingestelltem Offset kann die Regelung auf Funktion überprüft werden. Mit eingeschalteter Regelung wird eine kleine verbleibende Offsetabweichung ausgeregelt. Bei inaktiver Regelung, oder falscher Polung der Kompensationsspule bleibt diese vorhanden oder verstärkt sich noch. Auch andere Störungen werden ausgeregelt (vgl. Abbildung 6.2). Mit der aktivierten Regelung wird ein Ramsey Experiment auf einem der Übergänge zwischen dem S1/2 und D5/2 Zustand durchgeführt (vgl. [4, 5]). Dazu wurde zuerst ein π/2 Puls des 729 nm Lasers eingestrahlt, um eine Superposition der beiden Zustände zu erzeugen. Nach einer Wartezeit τ , auch Ramsey Zeit genannt, wird ein weiterer π/2 Puls des 729 nm Lasers eingestrahlt (siehe Abbildung 6.3 für eine Schematische Darstellung). Dieser hat jedoch eine Phasenverschiebung von φ ∈ [0; 2π] wodurch sich eine unterschiedliche Besetzungswarscheinlichkeit p(φ) des D5/2 Zustandes in Abhängigkeit von φ ergibt. Für ein idealisiertes System variiert diese zwischen 0 und 1. In Abbildung 6.4 ist die Besetzungswarscheinlichkeit für eine Ramsey-Zeit von 80 µs mit und ohne Stabilisierung dargestellt. Jeder Datenpunkt ergibt sich dabei aus 500 Einzelmessungen, die Fehlerbalken geben die statistischen Schwankungen wieder. Insgesamt wurden für 200 verschiedene Werte für φ Messungen durchgeführt. Die Durchgezogene Linie ist eine Anpassung mit fester Frequenz und optimierter Phase und Amplitude. Aus der Anpassung an die Messwerte lässt sich die Sichtbarkeit Q (engl. visibility) für eine Zeit τ bestimmen. Dieser berechnet sich über: Imax − Imin (6.1) Q= Imax + Imin 37 6. Magnetfeldstabilisierung an der Teilchenfalle Abbildung 6.1.: Installierte Regelung an der Ionenfalle, von unten gesehen. Zu sehen sind die Kompensationsspule, der Sensor mit Verstärkerschaltung, sowie die Kabel zur Stromversorgung. Die Regelschaltung ist nicht zu sehen. (a) ungeregelt (b) geregelt b 1,4 mG. Abbildung 6.2.: Magnetfeld am Ort des Ions. Dabei gilt: 100mV ≈ 38 L a s e r a m p litu d e τ π/2 P h a s e n d iffe r e n z φ π/2 0 Z e it (a) (b) Abbildung 6.3.: Schematische Darstellung des Übergangs sowie der verwendeten Laserpulse des Ramsey-Experiments. (a): Termschema des Übergangs auf dem das Ramsey Experiment durchgeführt wurde. Zum Anregen des Übergangs wird ein hochstabiler 729 nm Laser benutzt. (b): Lasersequenz zur Erzeugung einer kohärenten Superposition zwischen |gi und |ei Zustand. Die π/2 Laserpulse haben eine Dauer von 1,15 µs Wobei Imax(min) die Werte aus der Anspassung für die maximale (minimale) Population sind. Man erhält für die Sichtbarkeit ohne Stabilisierung Qohne = 0, 855 ± 0, 003 sowie mit Stabilisierung Qmit = 0, 923 ± 0, 15. Die Magnetfeldstabilisierung führt also zu einer größeren Sichtbarkeit. Bei der Messung mit Stabilisierung fällt auf, das die gemessenen Werte für die Besetzungswarscheinlichkeit zum Teil recht stark von den Werten der Anpassung abweichen. Auch sind Schwankungen in der Periodizität der Besetzungswarscheinlichkeit zu erkennen. Dies sind Zeichen für ein Verhalten der Regelung, welche in dem Modell dem die Anpassung zu Grunde liegt, nicht beschrieben werden. Dieselbe Messung wird für verschiedene Ramsey-Zeiten durchgeführt. Aus den Messdaten wird jeweils die Sichtbarkeit bestimmt, und diese dann gegen die Ramsey Zeit aufgetragen. Die erhaltenen Werte sind in Abbildung 6.5 abgebildet. Die Kurve für die Anpassungen ergeben sich aus dem erwarteten Wert bei stabilisiertem Magnetfeld, sowie Magnetfeld mit überlagerter 50 Hz Störung (siehe dazu Anhang A.3). Man kann erkennen das die Sichtbarkeit für die Messung mit Stabilisierung zwar höher ist, bei langen Ramsey Zeiten der Fehler in den Messpunkten jedoch immer größer wird. Bei Ramsey Zeiten über 350 µs werden keine verwertbaren Daten mehr gemessen. Dies wird zurückgeführt auf Schwankungen des Magnetfeldes auf längerer Zeitskala die durch die Regelung verursacht werden. Die Ursache ist noch zu ermitteln. Ein positiver Effekt lässt sich allerdings auf kurzer Zeitskala beobachten. Die Sichtbarkeit ist mit Regelung höher und die Nullstelle in den Messwerten ohne Regelung, welche durch die 50 Hz verursacht wird verschwindet ganz. Die Kohärenzzeit (Zeit bis der Ursprungswert auf 1/e abgefallen ist) liegt ohne Regelung bei 184±4 µs und mit Regelung bei 350±16 µs. Auch in diesen Werten kann man wieder die Probleme auf längerer Zeitskala erkennen. Die Unsicherheit in dem Wert für die Kohärenzzeit mit Regelung ist um das 4-fache größer. 39 6. Magnetfeldstabilisierung an der Teilchenfalle Ramsey-phase scan 11-54 1 0.9 0.8 D5/2-state population 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 1 2 3 4 5 6 729 nm-phase difference (π) 7 8 9 10 7 8 9 10 (a) ohne Stabilisierung Ramsey-phase scan 14-08 1 0.9 0.8 D5/2-state population 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 1 2 3 4 5 6 729 nm-phase difference (π) (b) mit Stabilisierung Abbildung 6.4.: Besetzungswahrscheinlichkeit (Population) des D5/2 Zustandes aufgetragen gegen die Phasendifferenz φ des zweiten Laserpulses. 40 Ramsey-fringe visibility 1 0.9 0.8 0.7 Visibility 0.6 0.5 0.4 0.3 0.2 0.1 0 0 100 200 300 Ramsey time (µs) 400 500 600 Abbildung 6.5.: Sichtbarkeit Q in Abhängigkeit von der Wartezeit τ zwischen den Laserpulsen mit (blau) und ohne Stabilisierung (grün). 41 7. Fazit In der Arbeit wurde eine Messchaltung konstruiert, mit der ein Magnetfeld bis zu 500 µG aufgelöst werden kann. Auf der Basis dieser Magnetfeldmessung wurde eine Regelschaltung konstruiert, die in der Lage ist Magnetfeldstörungen bis zu 25 mG bei Frequenzen bis 1000 Hertz auszuregeln. Diese Regelung wurde benutzt um das Magnetfeld an einer Ionenfalle zu stabilisieren, wodurch die Verlängerung der Kohärenzzeit eines Qbit erreicht wurde. Auf längerer Zeitskala verschlechtert die Regelung die Situation jedoch noch. Um dies zu beheben und eine weitere Steigerung der Kohärenzzeit zu erreichen, können noch verschiedene Punkte verbessert werden. Mit einer besseren Auflösung der Messschaltung kann das Magnetfeld stabiler gehalten werden. Dazu ist das Rauschen der Schaltung weiter zu verringern. Dies kann durch eine bessere Abschirmung und möglicherweise eine geringere Bandbreite erreicht werden. Ein weiterer Punkt der verbessert werden kann ist die Regelschaltung selbst. Durch Optimieren der PI Parameter lässt sich die Regelabweichung kleiner halten, und damit auch die Magnetfeldschwankungen. Auch der Einfluss des Rauschens der Regelung kann mit betrachtet werden und gegebenenfalls reduziert werden. Neben diesen eher praktischen Dingen kann auch an der theoretischen Umsetzung einiges verbessert werden. Dazu ist vor allem folgendes Problem zu lösen. Der Magnetfeldsensor misst nicht das Magnetfeld am Ort des Ions, sondern in einem gewissen Abstand davon. Die Regelung regelt damit nicht das Magnetfeld am Ort des Ions sondern an einem Ort in der Nähe. Dadurch kommt es am Ort des Ions zu einer „neuen“ Störung durch die Regelung. Dies liegt vor allem an dem unterschiedliochen Abstand der Spule zum Ion bzw. zum Magnetfeldsensor. Um dies zu lösen ist eine indirekte Magnetfeldbestimmung in der Nähe des Ions nötig. Dies soll mit mehreren Magnetfeldsensoren geschehen. Aus den erhaltenen Werten soll dann der Wert am Ort des Ions bestimmt werden. An diesem Problem wird gearbeitet. Neben all diesen aktiven Verbesserungen werden auch Möglichkeiten zur passiven Reduzierung der Magnetfeldstörungen genutzt. Um dies zu erreichen werden Kabel zur Stromversorgung und Leiterbahnen zu Geräten an der Teilchenfalle verkürzt und wenn möglich umgelegt. Zusätzlich dazu wird an einer Abschirmung gearbeitet. Diese besteht zum einen aus einer Stahlplatte, welche unterhalb der Geräte angebracht wird, und zum anderen aus einer Abschirmung aus so genanntem µ-Metall, welches Magnetische Felder abschirmt. Problematisch bei dem µ-Metall sind die hohen Kosten, und dass eine Abschirmung nur dann Sinn macht wenn sie geschlossen ist. Jedes Loch in der Abschirmung verschlechtert diese sehr stark. Des weiteren lässt sich µ-Metall schlecht verbiegen, und soll nicht geknickt werden. All dies macht eine passive Abschirmung schwierig. 43 A. Anhang A.1. Schaltplan des Reglers 8,2k OUTA +VSUP 10n 8 C1 C2 C3 22u 10u 100n C4 U$4 P$1 6V P$1 SPULE1 2 -INA OUTB 7 P$1 1k IN 1k INP$1 LT1886 1 3 +INA -INB 6 R7 P$1 R2 R3 C9 Mit nachfolgendem Schaltplan wurde die Platine für den Regelkreis zum Betreiben der Kompensationsspule erstellt. C10 1k 1 P$1 P$1 2P$1 SPULE2 R1 20 GND P$1 P$1 GND 470p R4 1k P$1 -6VP$1 U$3 4 C8 C7 C6 100n 10u C5 22u -VSUP +INB 5 R5 1k R6 A.2. Schaltplan der Messverstärkerschaltung Mit diesem Schaltplan wurde die Platine für die Messverstärkerschaltung erstellt. Nachträglich wurden einige Änderungen vorgenommen. So wurde das Erzeugen der Offsetspannung geändert. Der Teil um das Bauteil mit Namen IRF7509 dient zur Erzeugung eines Flipstroms zur Ausrichtung der Magnetfeldmessung. Dieses ist zwar auf der Platine angebracht, ist aber während der Messungen nicht genutzt worden. 45 A. Anhang 1 2 3 C17 22u C18 4 U$6 IRF7509 22u C14 C16 C13 22u C12 C15 C11 22u C10 6 C9 330 U$3 2 + IN+ LT1028 3 - INOUT 100n 100n 100n 100n 100n 22u C1 R4 R5 330 5 P$1 MICRO TLT 82 R16 R18 3300 3 2 U$4 + IN+ OUT - IN- 4 7 SUP+SUP- LT1028 6 6 C3 Out P$1 P$1 2.8p OUT 7 7 P$1 P$1 P$1 R8 560 R9 560 3 6 VSUP GND A B 820 R13 3 LT1028 6 68p C2 68p 4 7 SUP+SUP- + IN+ OUT 6 2 -12 56000 - IN- OUT - IN- + IN+ 4 7 SUP+SUP- 1k R17 1 -12 R10 2 U$2 3 2 U$1 LT1028 C23 -12 C22 22u 22u C19 C21 C8 22u C7 C20 C6 470 22u C5 5 -15V R1 82 C4 4 2 R2 470 100n 100n 100n 100n 100n 22u 3 330 10V R14 DIOD2 DIOD3 2 1 CATHODE ANODE 2 1 CATHODE ANODE 330 10V R15 56000 VSUP- R7 OUT R11 GNDA 1k R12 3 1 - IN- 2 100n R6 3300 U$5 C24 GNDA 3300 6 + IN+ 3 C AFF755B-MAGNETIC 2 8 8 A B C D E 46 P$1 P$1 D E 1 LT1028 R3 4 SUP-SUP+ 7 4 7 SUP+SUP- 8 7 6 5 -IF ITESTB VCC +VOUT +IF -VOUT ITESTA GND 1 2 3 4 MAGN1 1 2 ANODE CATHODE DIOD1 5V P$1 GNDP$1 +15V A.3. Ramsey Messungen A.3. Ramsey Messungen Die beiden folgenden Abbildungen enthalten die Messwerte sowie Anpassungen für eine Ramsey Messung mit und ohne Stabilisierung. Die aus den Anpassungen erhaltenen Werte sind in der Abbildung eingetragen. Mit Stabilisierung wird von Magnetfeldstörungen durch weißes Rauschen ausgegangen. Für die Anpassung wurde deshalb folgende Funktion benutzt: √ µB 2 (A.1) FA,Bnoise (T ) = A · e−( 2πgef f h Bnoise T ) Dabei ist T die Ramsey-Zeit, A der Wert für T = 0, gef f der Landéfaktor, µB das Bohr’sche Magneton und h das Plank’sche Wirkungsquantum. r Bnoise = 2 Bwhite(t) (A.2) beschreibt die Standartabweichung aus dem Rauschen des Magnetfeldes. Ramsey-fringe visibility 1 0.9 0.8 0.7 Visibility 0.6 0.5 0.4 0.3 B* = 0.22935 ± 0.010821 mG T2 = 350.5838 ± 16.5413 µs 0.2 A = 0.96996 ± 0.0042406 0.1 0 0 50 100 150 200 Ramsey time (µs) 250 300 350 Abbildung A.1.: Visibility in Abhängigkeit von der Wartezeit τ zwischen den Laserpulsen mit Stabilisierung. Bei ungeregeltem Magnetfeld wird eine zusätzliche periodische Störung mit 50 Hz überlagert. Dadurch ergibt sich für die Anpassung: √ µB µB 2 FA,Bsine ,Bnoise (T ) = A · J0 (2πgef f Bsine T ) · e−( 2πgef f h Bnoise T ) (A.3) h 47 A. Anhang J0 bezeichnet dabei die Besselfunnktion 1. Gattung und 0. Ordnung. Für das sinusförmige Störmagnetfeld wird angenommen: Bsine (t) = Bsine sin (2πf t) (A.4) Wobei f = 50 Hz ist. Aus diesen Anpassungen kann somit auf das Störmagnetfeld geschlossen werden. Ramsey-fringe visibility 1 0.9 0.8 Bsine = 0.46022 ± 0.003332 mG Bnoise = 0.064964 ± 0.0081314 mG T*2 = 184.2271 ± 3.6151 µs 0.7 A = 0.96405 ± 0.0044774 Visibility 0.6 0.5 0.4 0.3 0.2 0.1 0 0 100 200 300 Ramsey time (µs) 400 500 600 Abbildung A.2.: Visibility in Abhängigkeit von der Wartezeit τ zwischen den Laserpulsen ohne Stabilisierung. 48 Literaturverzeichnis [1] Felix Rohde, Jürgen Eschner. Quantum computation with trapped ions and atoms. Lecture Notes of the Les Houches Summer School in Singapore: Volume 91, July 2009 Oxford University Press (2011) [2] Forschung der Arbeitsgruppe von Jürgen Eschner an der Universität des Saarlandes. http://www.uni-saarland.de/lehrstuhl/eschner/forschung/lines/qnt.html Stand 25.06.2013 [3] F. Schmidt-Kaler, S. Gulde, M. Riebe, T. Deuschle, A. Kreuter, G. Lancaster, C. Becher, J. Eschner, H. Häffner, R. Blatt. The coherence of qubits based on single Ca+ ions. J. Phys. B: At. Mol. Opt. Phys. textbf 36, 623 (2003) [4] S. Haze, T. Ohno, K. Toyoda, S. Urabe. Measurement of the coherence time of the ground-state Zeeman states in 40 Ca+ . Appl. Phys. B 105, 761-765 (2011) [5] K. Toyoda, H. Shiibara, S. Haze, R. Yamazaki, amd S. Urabe. Experimental study of the coherence of a terahertz-separated metastable-state qubit in 40 Ca+ . Phys. Rev. A 79, 023419 (2009) [6] W. Thomson. On the Electro-Dynamic Qualities of Metals:–Effects of Magnetization on the Electric Conductivity of Nickel and of Iron. Proc. R. Soc. Lond. vol.8, 546550 (1856) [7] Jan Lunze. Regelungstechnik 1. Springer 8. Auflage, 1ff (2010) [8] Reinhard Lerch. Elektrische Messtechnik. Springer 6. Auflage 171ff (2012) [9] Sensitec. AFF755B. http://www.sensitec.com/upload/SENSITEC/PDF_Downloads /Datenblatt/Sensitec_AFF755B_DSE_03.pdf Stand 16.06.2013 20:49 [10] Linear Technology. LT1028. http://cds.linear.com/docs/en/datasheet/1028fb.pdf Stand 16.06.2013 20:54 [11] Linear Technology. LT1886. http://cds.linear.com/docs/en/datasheet/1886fa.pdf Stand 16.06.2013 20:58 [12] Texas Instruments. LM4040. http://www.ti.com/lit/ds/symlink/lm4040-n.pdf Stand 16.06.2013 [13] Linear Technology. LT1009. http://www.farnell.com/datasheets/42352.pdf Stand 21.06.2013 13:44 49 Literaturverzeichnis [14] H. J. Eichler, H.-D. Kronfeldt, J. Sahm. Das Neue Physikalische Grundpraktikum. Springer 2. Auflage 277ff (2006) [15] W. Demtröder. Experimentalphysik 2 - Elektrizität und Optik. Springer 5. Auflage 121ff (2008) 50 Danksagungen Ich möchte mich an dieser Stelle bei all denen Bedanken, die mich beim Erstellen dieser Arbeit unterstützt haben. Dabei sind zu nennen Professor Jürgen Eschner und die Mitarbeiter seiner Arbeitsgruppe für eine hervorragende Betreuung und Hilfe bei sämtlichen großen und kleinen Fragen und Problemen. Insbesondere möchte ich mich bei Stephan Kucera, der mich beim entwerfen und bauen der Schaltung viel unterstützt hat sowie bei Pascal Eich, der seinen Namen für Bestellungen zur Verfügung gestellt hat sowie beim Korrekturlesen geholfen hat, für ihre Unterstützung und Hilfe besonders bedanken. Auch möchte ich mich bei Peter Ken Schuhmacher sowie Michael Kreis für die investierte Zeit zum Korrekturlesen bedanken. 51