doc
Werbung

Der Phasenraum
F=F(s,p)
wird aufgespannt durch den Ort s des Orbits am Rande der Billardfläche
p = cos
und das Momentum
Die Stöße mit der Umrandung, der Bande, sind die Iterationen M,
Mit jeder Iteration M verändert sich der Ort s auf der Bande und
auch das Momentum p
Das Momentum ändert sich mit der Zeit zwischen
cos = -1 und cos 0 = +1 und der Ort s = [0, L ]
Die Iterationsformel:
s (n 1)
= M
p (n 1)
s ( n)
p ( n)
p
Ist L die Länge der Bande, verändert sich der Wert von s zwischen
0 <= S <= L
Es gibt 3 Arten
wie sich der Orbit nach den einzelnen Stößen entwickelt:
1.) Es gibt eine endliche Zahl N von Fixpunkten, nach denen sich
der Orbit schließt und den gleichen Weg wiederholt:
s n N
= MN
p(n N )
s(n) sn
=
p(n) p(n)
2.) Die Iterationen s,p füllen eine invariante Kurve, also eine
kontinuierliche Kurve im Phasenraum aus. Die Bewegung folgt einer
konstanten Funktion
F (s1, p1) = F (s0, P0)
Die Kurve wird auf sich selbst abgebildet, obwohl die einzelnen
Stoßpunkte sich nicht decken. Die Arten 1.) und 2.) heißen integrabel also nicht
chaotisch.
3.) Die Iterationen füllen eine ganze Fläche im Phasenraum aus.
Der Orbit reagiert sensibel auf die Anfangswerte So , Po und
entwickelt sich somit chaotisch
6
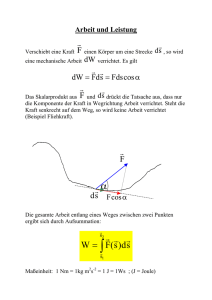
Entwicklung von s und p ; und
tan = Steigung der Tangente im Stoßpunkt
R ist der Krümmungsradius
dx/ds = cos
ds/R = d ; ds = R * d
f
S=
ds
R
dx
dy
x
) d
0
dx/ds = cos ; dx= ds cos
x=
dy/ds = sin ; dy = ds sin
y=
dx = x(1) – x(o) =
cos ds
sin ds
cos ds/d *d = R() cos d
dy = y(1) – y(o) = R() sin d
Da die Steigung des Orbits am Ausfallpunktist m = dy/dx
ist die Steigung m =
R( ) sin d
R( ) cos d
= tan ( o + o)
1
1
o+o
1
dy
o
o
dx
1 - 1 = o +o
p1 = cos 1
1 =1 - o - o
s1 = 1 * R/)
7
Stabilität von geschlossenen Orbits
Ein Orbit ist stabil, wenn er nach vielen Stößen ist die Nähe eines geschlossenen
Orbits gelangt.
Er ist unstabil, wenn er sich vom geschlossenen Orbit exponentiell entfernt.
Der geschlossene Orbit erreicht nach N Iterationen den Zustand
sN
so
=mN
PN
po
mN bedeutet =
s1 / so....s1 / po N so
p1 / so....p1 / po po
=
N m(s,p) = m1,o*m2,1*m3,2 * * mo,N-1
Die Stabilität hängt mit dem Eigenwert dieser Matrix mN zusammen.
Die Spur der Matrix Tr = s1/so + p1/po
bestimmt den Eigenwert = ½ {Tr mN [(Tr mN )² -4] 1/2 }
Wenn | Tr MN | < 2
dann ist die Wurzel aus (Tr mN )² -4 imaginär; der Eigenwert ist komplex
conjugiert = exp( ij)
Folge: Der Orbit ist stabil. Die
Abweichung oscilliert um die Null und bleibt gebunden Der Orbit heißt
elliptisch.
ist der Stabilitätswinkel und j die Anzahl der Iterationen.
Ist (Tr mN ) > 2 , dann ist die Wurzel reall; = exp(j). Die Abweichung steigt
ständig exponentiell.
Folge: Der Orbit ist instabil und heißt hyperbolisch.
ist der Instabilitäts-Exponent.
Der Orbit mit (Tr mN ) = 2 ist neutral. Die Eigenwerte sind +1 und –1 und die
Abweichungen vom geschlossenen Orbit steigen linear.
8
Wenn die Länge des Trajektorien-Segments und R der Krümmungsradius ist,
ist das Stabilitätskriterium
0..instabil
1 0..neutral
2R
0..stabil
Moment=cos /3
Moment =0
>2R
R
R
2R/2R(=/2R) – 1 = 0
neutral
R
<2R: /2R – 1 < 0
stabil - elliptisch
R
R
(/2R >1) –1 >0
Instabil = hyperbolisch
9
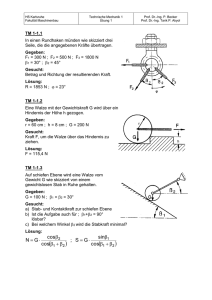
Stadion
R
R
2 Halbkreise mit gleichem Radius R, die durch Parallelen verbunden sind.
Stadien sind immer ergodisch. Nach N Ieterationen wird willkürlich jeder Punkt
der Umrandung erreicht. Geht N erreicht der Orbit auch die Nähe aller
Punkte im Phasenraum, also alle Punkte s mit den Momenta p
Selbst, wenn die Parallelen sehr klein sind, bleibt die Ergodik erhalten.
Selbst bei = 0,001 wird fast jeder Punkt auf der Umrandung s getroffen; nur
das Momentum bleibt gleich.
Untersucht wurde der Spezialfall d= 1 und Abschusswinkel 68,4° |
p=cos 68,4° 1/e.
Bei 900 Stößen und = 0,001 fast keine Abweichung vom stabilen Momentum.
Bei 900 Stößen und = 0,01 sind kleine Abweichungen vom Hauptmomentum
ersichtlich.
Bei = 0,1 sind die Momenta willkürlich verteilt; man sieht aber in 2 Intervallen
in der Umrandung s und dem Momentum p freie Räume.
Bei = 1 und 5000 Stößen bilden sich 2 kleine quadratische leere Bereiche
bei p = 0; der übrige Phasenraum ist willkürlich mit Punkten ausgefüllt, auch die
Bereiche mit p < 0, d.h. Winkel über 90 °. –1 <= p <= +1
Die quadratischen Löcher liegen bei ¼ L und ¾ L.
10
Die Löcher entstehen, wenn der Orbit senkrecht auf die Parallelen stößt Dort ist
der Winkel der Trajektorie mit der Bande 90° und cos 90°= 0
Die Familie solcher Trajektorien formt im Phasenraum
(½ R) < s < ( ½ R + ) und
/3/2 R + ) < s < ( 3/2 R + 2 )
2 Kurven.
Diese treten miteinander in Resonanz und vollführen eine Zickzack – Linie, bis
sie die Halbkreise wieder erreichen und im Chaos versinken.
Ergodik-Theorem: Ein Orbit muß in gleichen Bereichen des Phasenraumes
gleich Zeiten zubringen.
Nachdem der Orbit die Resonanz verlassen hat, verbringt er viele Stöße (also
lange Zeit) damit, die Resonanz-Region zu meiden.
Ein Orbit, der weit entfernt von unveränderlichen Kurven startet, bemüht sich,
die Nachbarschaft solcher Kurven und so die Resonanz zu meiden.
Die Löcher in den Abbildungen rühren von den Zick-Zack-Resonanzen her.
Die positionsabhängige Wechselbeziehung zwischen den Stößen wird durch die
Ergodizität nicht verhindert.
Entfernt von den Löchern springen die Punkte des Poincaré –Schnitts
willkürlich und zufällig über die Fläche
Die lange Diagonale ist ein geschlossener Orbit:
N = 2; so = 0 ; s1 = ½ L ; P0 = p1 = 0
/ (2R) –1 = [ (2R + ) / 2R ] – 1 = / 2R > 0
Diese Bahn ist also instabil
Der Orbit von Parallele zu Parallele hat
/2R – 1 = 2R/2R –1 = 0 Orbit neutral
Ein falsch gezielter Orbit startet von so = 0 aus mit einer kleinen
Winkelabweichung Po. Nach 2j Stößen hat die Kugel die Richtung
P(2j) = j p(o)
11
Der Orbit divergiert unstabil weg vom langen Durchmesser wegen des
exponenziell ansteigenden Eigenwertes j.
Es genügt ein Abschußwinkel von 1 rad = 0,017° abweichend von der
geschlossenen Diagonale, um alle Erinnerungen an den geschlossenen Orbit
auszulöschen.
Der Verlust der Erinnerung geschieht nach n* Stößen
n* = 2
log( 1 / po)
log
Bei R = 1; = 1; Tr*m² = 14 und = 13,93; dann ist Po = 10-14
n* = 24,48
Nach 250 Stößen sind keine weiteren 2 Stöße vorhersehbar.
Das würde die Kapazität des Computes übersteigen.
Trotzdem ist nachgewiesen, dass Anfangsbedingungen existieren, so dass der
exakte Orbit ganz nahe bei dem vom Computer berechneten gelegen hat.
Die Hoffnung, dass eine Trajektorie bis in alle Ewigkeit auch nur
annäherungsweise berechnet werden kann, muß aufgegeben werden.
12
Die Ellipse
X
13
1 - 1 = O + o
Mit Krümmungsradius R() ist
R * d = ds
R() =
ds
d
'
s() = dR( )
0
Das Momentum ist wie immer p = cos
Nach n Stößen entwickelt sich aus dem Anfangszustand { so . po }
der Zustand {sn , pn }
14
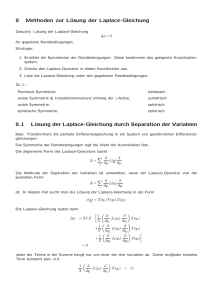
Die Ellipse
y
x
x²
y²
+
= 1
a2
b²
Exentrizität
1 b² / a ²
Orbits, die nicht durch den Abstand der Brennpunkte gehen, berühren
wiederholt eine mit der äußeren Ellipse konfokale Ellipse.
Bahnen, welche diesen Abstand durchschneiden, berühren ein konfokale
Hyperbel.
Bei einer bestimmten Konstante F ( s,p ) wird der Orbit auf eine invariante
Kurve im Phasenraum (s,p) eingeschränkt
F(s,p) =
p ² ² cos ²( )
1 ² cos ²( )
0<<1
Das liegt an einer geometrischen Eigenart der Ellipse.
Ob eine Ellipse oder eine Hyperbel berührt wird, hängt von der Matrix M ab, die
die Bewegung der Kugel nach dem Stoß regelt, und von dem Eigenwert .
Bleibt M fest und man variiert , wird eine Ellipse berührt;
Bleibt fest und man variiert M , entsteht eine Hyperbel.
15
Konturen der Bewegungskonstante F in Figur 7
a) die Konturen nahe bei p = +1 und p = -1
Damit wird der Orbit beschrieben, der eine Ellipse berührt
b) Die Konturen mit kleinem |p| und Maxima und Minima
bei s = ¼ L und ¾ L
dort werden die Bahnen beschrieben, die eine Hyperbel berühren.
Das Ganze ist sehr symmetrisch.
Die 2-Stöße Orbits entlang dem langen Durchmesser sind
isolierte , geschlossene Orbits. p=0 und s = 0 und L/2
Dieser ist unstabil, denn
/2R =
2a
>1
2R
Der kurze Durchmesser hat p = 0 und s = L/4 und und ¾ L
Hier haben wir
/2R =
2b
1 < 0
2R
Dieser Orbit ist stabil.
Jeweils ist das Trajektoriensegment R der Krümmungsradius.
16
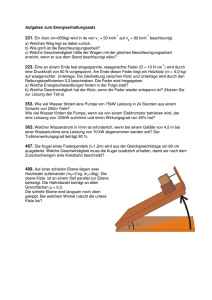
Das Cardioid – Billiard
y
Das Cardioid in
Polarkoordinaten (r,):
() = 1 + cos
= [ -, + ]
r
+
-
0
1
2
x
Die Bogenlänge ist
s = 4 sin (/2);
weil ds/d = 2 cos(/2)
Der Rand der Cardioid –Kurve hat die Funktion
(x² + y² - x)² - (x² + y²) = 0
Das Momentum ist p = 1 + cos mit dem Parameter [0,1]
Damit wird die Krümmung der Kurve errechnet mit
K ()=
p ² 2 p '² pp"
3
=
3/ 2
( p ² p '²)
4 cos( / 2)
Im Ursprung ist = +/- und
= 1 + cos = 1-1 = 0
Das Cardioid ist
ergodisch,
mischend und
ein K-System
In einem K-System ist der gegenwärtige Zustand A0 völlig unabhängig
von den vorherigen Zuständen, die durch eine Iteration P hervorgerufen
worden sind
Pj(A -j) A0
mathematisch:
lim sup | µ(A0 B ) - µ(A0)µ(B) | = 0
N
B B
17
Rechteck
Quadrat
L
Das Quadrat besitzt ein invariantes Orbit , der zu seinem Anfangspunkt
zurückkehrt und somit geschlossen ist, nämlich das mit so = L/2
und p = cos 45° = ½ 2
B
90-
+
-
-
A
Die Steigung tan = y/x der Trajektorien-Elemente bleibt bei allen
Iterationen betragsmäßig gleich. Nur das Vorzeichen wird nach jeder Iteration
gewechselt.
Eine invariante Bahn gibt es auch hier: bei so = A/2
und po = cos ( arctan B/A).
Das momentum wechselt jeweils von cos (90°- )
zu cos .
18
Durch die gleichbleibende Steigung sind alle Bahnelemente paarweise parallel.
Trotzdem kommt es bei jedem Umlauf zu Verschiebungen auf den Banden, so
dass letzten Endes der Orbit jedem Punkt auf den Rändern beliebig nahe kommt.
Aber es sind nur 2 Momenta zu beobachten, so dass das System nicht chaotisch
ist.
19
Das Oval
= 0,6
= 1,5
= 1,0
Der Rand des Ovals hat die Funktion
R() = a ( 1 + cos 2 )
ist der Deformationsfaktor . Für = 0 ergibt sich der Kreis
R() = a
a ist so etwas wie der Radius eines Kreises.
Die Koordinaten des Ovals im euklidischen System sinsd
x() = a[( 1 + ½ ) sin + /6 cos 3]
y() = a[(-1 + ½ ) cos - /6 cos 3]
Der Weg von Stoßpunkt zu Stoßpunkt ist
s = a [ .- ½ + 1/3 sin 2]
bestimmt die Form des Ovals
Bei [o,1] sind die Ovale abgerundet.
Ab = 1 ergeben sich rechts und links Spitzen und Schwalbenschwänze
20
Der Orbit entlang dem langen Durchmesser von s=0 bis s=a
und dem Momentum p =
1 / 3
2(1 ² / 9
und entlang dem kurzen Durchmesser von s= ½ a bis 3/2 y
und dem Momentum p =
1 / 3
2(1 ² / 9
sind beide unstabil.
Nur die Orbits von S= a(1/4 - ½ ) bis a a(1/4 - ½ )
mit dem Momentum p = 1/ 2 sind stabil.
4 – Stoß – Orbits können stabil oder instabil sein:
stabil
instabil
soll liegen 0 <= < = 1
Stabilität folgt aus
2(1 / 3)
=
1
R
Bei Neutralität ist = R /R = 1 = 3/5
Bei = 1 /R = 2/3 /R – 1 <0 Orbit stabil
Bei = 1/5 /R = 14/9
/R – 1 >0 Orbit instabil
21