Praktikumsversuch Nr. 3
Werbung

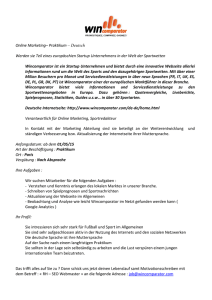
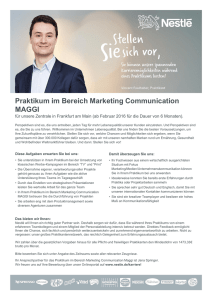
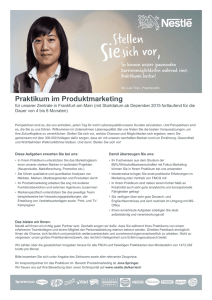
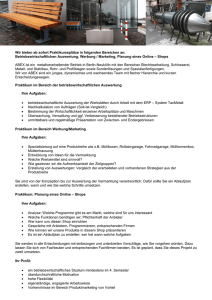
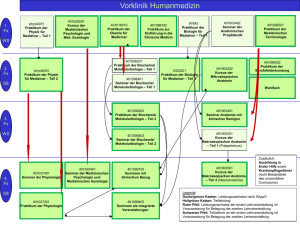
Fachbereich 6 Luft- und Raumfahrttechnik Labor für Leichtbau und Schwingungstechnik Prof. Dr.-Ing. M. Wahle Praktikum Grundlagen Maschinendynamik Thema : Auslegung von Dynamischen Schwingungsdämpfern zur passiven Schwingungskontrolle elastischer Systeme – Servohydraulische Prüfmaschine der FH Aachen Versuch-Nr. : 04 Name : ........................................................... Vorname : ........................................................... Matrikel-Nr. : ........................................................... Gruppe : ........................................................... Versuch durchgeführt am : ........................................................... Hinweis : Der Stoff dieses Versuches wird im Rahmen der entsprechenden Fachprüfung abgefragt. Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 2 Praktikum Grundlagen Maschinendynamik Versuch 04 Auslegung von Dynamischen Schwingungsdämpfern zur passiven Schwingungskontrolle elastischer Systeme Prof. Dr.-Ing. M. Wahle Inhalt : 1. Einführung 2. Elastische Struktur (Hauptsystem) bei Fußpunktanregung 2.1 Basisdaten der Struktur 2.2 Reduziertes Hauptsystem für die Grundeigenschwingung 2.3 Reduziertes Hauptsystem für die erste Oberschwingung 3. Auslegung Dynamischer Schwingungsdämpfer 3.1 Theoretische Grundlagen 4. Versuchsdurchführung 4.1 Abstimmung Dynamischer Schwingungsdämpfer (Grundschwingung) 4.2 Abstimmung Dynamischer Schwingungsdämpfer (1. Oberschwingung) 4.3 Gesamtsystem bei Fußpunktanregung (Grundschwingung) und Vergleich 4.4 Gesamtsystem bei Fußpunktanregung (1. Oberschwingung) und Vergleich 5. Bewertung 6. Literatur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 3 1. Einführung Zur Schwingungskontrolle Maschinen, Aggregaten und Strukturen stehen aktive und passive Abhilfemaßnahmen zur Verfügung (siehe Bild 1.1). Passive Maßnahmen sind wesentlich einfacher einzusetzen, da diese keine Fremdenergie benötigen. Zusätzlich spricht auch der Kostenvorteil in vielen Fällen für die passiven Zusatzsysteme. Besonders verbreitet ist der Dynamische Schwingungsdämpfer, der im Prinzip aus einer Dämpfermasse mD, einer Dämpfersteifigkeit kD und einer zugehörigen Dämpfung cD besteht. Bei der Realisierung eines Dynamischen Schwingungsdämpfers kann auf unterschiedliche Bauelemente zurück gegriffen werden, um kD und cD zu realisieren, wie z. B. Hydrolager und Hydrobuchsen, Gummilager, Edelstahlkissen usw. . Die Auslegung wird in der Praxis dadurch erschwert, dass die genannten Bauelemente ein mehr oder weniger stark ausgeprägtes nichtlineares Verhalten aufweisen. Bild 1.1 : Möglichkeiten zur Herabminderung der Schwingungen einer Leichtbaustruktur (passive mechanische Maßnahmen) Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 4 2. Elastischen Struktur (Hauptsystem) bei Fußpunktanregung Hierbei wird eine einfache Struktur (Flachstahl als Biegebalken) einseitig auf dem Kolben einer servohydraulischen Prüfmaschine befestigt (Bild 2.1 und 2.2), wobei nähereungsweise von einer festen Einspannung ausgegangen werden kann. Diese Annahme ist im Versuch durch den Vergleich mit der Theorie von biegeschwingenden Balken (siehe Bild 2.3) zu überprüfen. Bild 2.1 : Versuchsaufbau für Grundschwingung des Balkens mit Dämpferaufnahme Bild 2.2 : Versuchsaufbau für 1. Oberschwingung des Balkens mit Dämpferaufnahme Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer k=4 k=3 k=2 k=1 Eigenschwingungsform und -kreisfrequenzen von Balken mit konstanten Parametern bei unterschiedlichen Randbedingungen mit k Ak EI L4 (Massenbelegung = Querschnittsfläche * Dichte) Bild 2.3 : Biegeeigenschwingungen von Balken 5 Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 6 2.1 Basisdaten der Struktur Folgende Daten sind bekannt : Material Stahl : E = 210 000 N/mm2 ρ = 7850 kg/m3 Geometrie : L = 800 mm (Länge von der Einspannstelle aus gemessen für Grundeigenschwingung) L = 1000 mm (Länge von der Einspannstelle aus gemessen für 1. Oberschweingung)) B = 50 mm (Breite) H = 8 mm (Dicke) Die Bestimmung der Eigenfrequenzen wird mit der Impulshammermethode durchgeführt (Bild 2.4). Dabei wird mit dem Hammerschlag an einer geeigneten Stelle breitbandig Energie zugeführt, wie das zu messende Frequenzspektrum der Erregerkraft zeigt. Das Antwortspektrum wird mit einem Beschleunigungssensor aufgezeichnet. Die Übertragungsfunktion bzw. Transferfunktion (Division der komplexen Zeiger von Beschleunigung und Kraft) kann mit der Vergrößerungskurve verglichen werden. Mit Hilfe des Resonanzschärfeprinzips kann die Lehrsche Dämpfung ermittelt werden. Bild 2.4 : Impulshammermethode (Modalanalyse) Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 7 Das Ergebnis des Impulshammerversuches soll in Tab. 2.1 eingetragen werden. Die Knotenlage für die 1. Oberschwingung wird durch einen weiteren Versuch in Resonanznähe mit der servohydraulischen Prüfmaschine (Fußpunktanregung der Struktur) bestimmt. Eigenschwingungsform-Nr. Eigenfrequenz [Hz] Messung Eigenfrequenz [Hz] Theorie Lehrsche Dämpfung [%] 1 Knotenlage [mm] - 2 3 - Tab. 2.1 : Auswertung der betrachteten Eigenschwingungen der Struktur 2.2 Reduziertes Hauptsystem für die Grundeigenschwingung Hierzu muss vorab entschieden werden, an welche Stelle des Hauptsystems der Dynamische Schwingungsdämpfer angebracht werden soll. Grundsätzlich führt die Stelle der größtmöglichen Verformung der betreffenden Eigenschwingungsform zur höchsten Effizienz. Dann wird die reduzierte Hauptsystemmasse minimal und bei vorgegebenem Massenverhältnis μ des Schwingungsdämpfers wird die Dämpfermasse mD ebenfalls minimal (Leichtbauaspekt). Stelle der Reduktion (Dämpferangriffspunkt) : Ermittlung der relevanten Daten des reduzierten Hauptsystems (Tab. 2.2) unter Einbeziehung der Ergebnisse bei Fußpunktanregung: mRed [kg] kRed [N/m] cRed [N/(m/s)] max. Antwort [mm] Fußpunktamplitude s0 = 0.1[mm] Tab. 2.2 : Reduzierte Daten und dynamische Antwort der Grundeigenschwingung der Struktur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 8 2.3 Reduziertes Hauptsystem für die erste Oberschwingung Die Stelle der maximalen Verformung der 1. Oberschwingung kann ebenfalls mit Hilfe des Versuches bei Fußpunktanregung nach Kap. 2.1 erfolgen. Daraus ergibt sich die geeignete Stelle der Reduktion (Dämpferangriffspunkt) : Die reduzierten Größen können in diesem Fall nicht mehr durch eine einfache Handrechnung bestimmt werden. Deshalb soll ein weiterer Versuch mit modifiziertem Schwingungssystem durchgeführt werden, um eine zusätzliche Information zur Aufstellung einer 2. Gleichung zu erlangen (Unbekannte : mred, kred). Zusätzliche Versuchsergebnisse : Aufstellung der Gleichungen : Ermittlung der relevanten Daten des reduzierten Hauptsystems (Tab. 2.3) : mRed [kg] kRed [N/m] cRed [N/(m/s)] max. Antwort [mm] Fußpunktamplitude s0 = 0.1[mm] Tab. 2.3 : Reduzierte Daten und dynamische Antwort der 1. Oberschwingung der Struktur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 9 3. Auslegung Dynamischer Schwingungsdämpfer 3.1 Theoretische Grundlagen Die entsprechenden Bewegungsgleichungen sind [1] zu entnehmen. Die Abstimmung des Dynamischen Schwingungsdämpfers kann Bild 3.1 entnommen werden. Folgende Definitionen sind dabei zu beachten: m2 m1 D k 2 m2 : : N k1 m1 D D N w N xstat F0 k1 c2 D 2m2 N : : : : Massenverhältnis ungekoppelte Eigenkreisfrequenz des Dynamischen Schwingungsdämpfers ungekoppelte Eigenkreisfrequenz des Hauptsystems Eigenfrequenzverhältnis Frequenzabstimmung für entkoppeltes Hauptsystem statische Auslenkung des Hauptsystems : kritische Dämpfung des Dämpfers bezogen auf N In Bild. 3.2 ist die Antwort der Hauptmasse m1 für drei verschiedene relative Dämpfungen D des Dämpfers dargestellt. Man erkennt die sogenannten Fixpunkte der Vergrößerungskurve P und Q. Diese liegen nicht auf gleicher Höhe. Damit liegt kein optimales Frequenzverhältnis und damit keine optimale Auslegung des Dynamischen Schwingungsdämpfers vor. Im Übrigen kann man hierbei erkennen, wie sich eine nicht optimale Frequenzabstimmung (D D N =1.0) auf den Frequenzgang auswirkt. Das Optimum liegt hierbei um 5 % niedriger. Die Ermittlung einer optimalen Abstimmung des Dynamischen Schwingungsdämpfers gelingt zum Beispiel bei konstanter Kraftanregung folgendermaßen: Zuerst wird das optimale Frequenzverhältnis gesucht. Dieses erhält man, indem die Punkte P und Q auf die gleiche Ordinate gebracht werden . Es ergibt sich folgende Bedingung: D opt 1 1 1 D m2 1 1 m1 mit 1 N . (3.1) Im zweiten Schritt ist die Dämpfung so abzustimmen, daß in der Nähe der Punkte P und Q eine horizontale Tangente der Vergrößerungskurve für x1 resultiert. Man erhält mit einer Mittelwertbildung der in P und Q erzielten Ergebnisse: Dopt c2 2m2 k 1 m1 3 8(1 ) 3 . (3.2) Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 10 Bei optimaler Auslegung des Dynamischen Schwingungsdämpfers kann die Amplitude der Schwingung auf das Maß x 2 1 1 x stat opt reduziert werden. (3.3) Für die Dimensionierung des Dämpfers ist weiterhin noch die Berechnung des maximalen Relativweges x2 x1 bei einem optimal ausgelegten Dynamischen Schwingungsdämpfer nach den Beziehungen (3.1) und (3.2) wichtig : 2 y x stat opt x x 2 1 xstat 2 opt xˆ 1 1 xstat opt 2 D (3.4) . Somit wird insbesondere bei kleinen Dämpfermassen (kleines , relativ kleiner Wert D ) der Relativausschlag groß. Dies ist bei der Realisierung im Hinblick auf die Auswahl von Bauelementen zu berücksichtigen. Zusätzlich sind noch drei weitere vom Optimum abweichende Verläufe verschiedener Dämpfungsabstimmungen D dargestellt (Bild 3.3). Offenbar wirkt sich eine Abweichung vom Dämpfungsoptimum weit weniger stark aus, als eine Abweichung vom optimalen Frequenzverhältnis. Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer Bild 3.1 : Optimale Auslegung von Dynamischen Schwingungsdämpfern 11 Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 12 Error! Not a valid link. Bild 3.2 : Systemantwort bei nicht optimaler Frequenzabstimmung D des Dynamischen Schwingungsdämpfers (ungedämpftes Hauptsystem) Bild 3.3 : Systemantwort bei optimalem Frequenzverhältnis D opt des Dynamischen Schwingungsdämpfers und Variation des Dämpfungsmaßes D bei ungedämpftem Hauptsytem Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 13 4. Versuchsdurchführung 4.1 Abstimmung Dynamischer Schwingungsdämpfer (Grundschwingung) In diesem Fall wird eine Ausführung des Dynamischen Schwingungsdämpfers nach Bild 4.1 empfohlen. Das Massenverhältnis ist so vorzugeben, dass die optimale Frequenzabstimmung näherungsweise erreicht werden kann. Dazu ist allerdings vorab zu klären, welche Anregungsart nach Bild 3.1 vorliegt. Die Eigenfrequenz des Dynamischen Schwingungsdämpfers ist in einem getrennten Abklingversuch abzustimmen. Die Verformung wird dabei mit einem induktiven Wegaufnehmer aufgenommen und auf einem Speicheroszilloskop angezeigt. Die zugehörige Dämpfung ist dabei ebenfalls zu ermitteln. Bild 4.1 : Abklingversuch mit Dynamischem Schwingungsdämpfer für die Grundeigenschwingung der Struktur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 14 4.2 Abstimmung Dynamischer Schwingungsdämpfer (1. Oberschwingung) In diesem Fall wird eine Ausführung des Dynamischen Schwingungsdämpfers nach Bild 4.2 empfohlen. Das Massenverhältnis ist so vorzugeben, dass die optimale Frequenzabstimmung näherungsweise erreicht werden kann. Die Eigenfrequenz des Dynamischen Schwingungsdämpfers ist in einem weiteren Abklingversuch abzustimmen. Die zugehörige Dämpfung ist auch hierbei zu ermitteln. Bild 4.2 : Abklingversuch mit Dynamischem Schwingungsdämpfer für die 1. Oberschwingung der Struktur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 15 4.3 Gesamtsystem bei Fußpunktanregung (Grundschwingung) und Vergleich Zur Bewertung der Dämpfungsmaßnahme ist ein Versuch mit wachsender Frequenz im Bereich um die Grundeigenfrequenz durchzuführen. Bei der Frequenz mit maximaler dynamischer Antwort des Balkens ist eine Messwertaufnahme mit dem MehrkanalFrequenzanalysator ebenfalls mit einer Fußpunktamplitude von 0.1 mm durchzuführen. Die maximale Beschleunigung ist festzuhalten, um diese mit dem entsprechenden Wert im Fall ohne Dynamischen Schwingungsdämpfer vergleichen zu können. Bild 4.3 : Fußpunktanregung mit Dynamischem Schwingungsdämpfer für die Grundschwingung der Struktur Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 4.4 Gesamtsystem bei Fußpunktanregung (1. Oberschwingung) und Vergleich Hierbei soll analog zu Kap. 4.3 vorgegangen werden. Bild 4.4 : Fußpunktanregung mit Dynamischem Schwingungsdämpfer für die 1. Oberschwingung der Struktur 16 Praktikum Grundlagen Maschinendynamik Versuch 4 - Auslegung Dynamischer Schwingungsdämpfer 17 5. Bewertung Abschließend soll ein Vergleich der maximalen Beschleunigungen ohne und mit Dyanamischem Schwingungsdämpfer erfolgen (Tab. 5.1). Dabei soll auch das theoretische Optimum für das jeweils vorliegende Massenverhältnis nach Gl. 3.3 zum Vergleich herangezogen werden. Eigenschwingungsform-Nr. Maximale Vergrößerung Beschleunigung ohne Dämpfer (Messung) [-] Maximale Vergrößerung Beschleunigung mit Dämpfer (Messung) [-] Maximaler VergrößerungsFaktor mit Dämpfer (Theorie) [-] 1 2 Tab. 5.1 : Vergleich ohne und mit Dynamischem Schwingungsdämpfer 6. Literatur [1] Wahle, M. : Grundlagen der Maschinen- und Strukturdynamik, Verlag Mainz, Wissenschaftsverlag, Aachen, Juni 1995, ISBN 3-930911-61-2