1 Fehlerabschätzung für die Numerische Integration 2 Trapezmethode
Werbung

MLAN3
2
TRAPEZMETHODE
1
1 Fehlerabschätzung für die Numerische Integration
Zu bestimmen ist eine Näherung für das bestimmte Integral
Zb
I=
f (x) dx
wobei
b>a
a
Der dabei gemachte Fehler hängt von der verwendeten numerischen Methode ab.
2 Trapezmethode
Satz 1 Trapezregel
Sei ∆x = h = b−a
n , Stützstellen xk = a + k · ∆x, k = 0, 1, 2, . . . , n
(äqudistante Zerlegung des Intervalls [a, b]) mit den Stützwerten yk = f (xk ).
Die Trapezregel liefert die Approximation
³y
yn ´
0
T (h) = h ·
+ y1 + y2 + . . . + yn−1 +
2
2
Für den dabei gemachten Fehler gilt:
(1)
|I − T (h)| =
b − a 2 00
h |f (ξ)|
12
a≤ξ≤b
Bemerkung 1 Abschätzung
Da ξ unbekannt, kann für eine gewisse Genauigkeit die erforderliche Schrittweite h nur bestimmt werden, falls
|f 00 (x)| in [a, b] nach oben abgeschätzt wird, d.h.
|I − T (h)| ≤
b−a 2
h M
12
wobei M := max |f 00 (x)|
a≤x≤b
Bemerkung 2 praktisches Vorgehen
Häufig wird diese Abschätzung nicht durchgeführt, sondern es wird eine Folge von Näherungen {T (hi )}
berechnet, indem hi+1 = h2i (fortgesetzte Halbierung i = 0, 1, 2, . . .). Abbruch dieses Vorgehens, falls zwei
aufeinanderfolgende Näherungen bis auf eine vorgegebene Genauigkeit übereinstimmen.
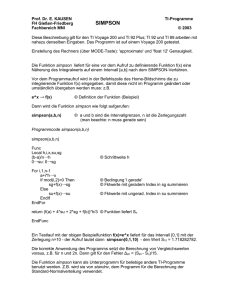
2.1 Beweis von (1)
Betrachte das Teilintervall [xk , xk+1 ]
f (x)
.....
..........
....
...
...
..............
...
..................... ....
...
........ ...........
..................
....
...
.............
...
...
...
...
....
...
...
...
... k+1
...
...
...
...
...
...
...
...
k ....
...
...
...
..
...
...
...
...
...
...
...
..
...
...
...
...
..
..................................................................................................................................................................................................................................................................................................................
..
..
..
..
..
...
...
k+1
k
...
...
....
D(h)
y
y
x
m
x
0
Tk (h) :=
h
2
x
· (yk + yk+1 )
Der absolute Fehler D(h) auf diesem Intervall ist
xZk+1
(2)
D(h) :=
f (x) dx −
xk
zhaw
h
· (f (xk ) + f (xk+1 ))
2
ungr/trapez_begr.tex
MLAN3
2
mit h = xk+1 − xk , m =
xk +xk+1
,
2
m+ h
2
Z
D(h)
(3)
=
TRAPEZMETHODE
xk = m −
h
2
2
und xk+1 = m + h2 .
µ µ
¶
µ
¶¶
h
h
h
f (x) dx − · f m −
+f m+
2
2
2
m− h
2
(4)
=
F
µ
¶
µ
¶
µ µ
¶
µ
¶¶
h
h
h
h
h
−F m−
− · f m−
+f m+
m+
2
2
2
2
2
wobei F eine Stammfunktion von f .
Erste Ableitung von D(h):
Mit der Kettenregel erhalten wir
(5)
d
D(h) =
dh
D0 (h)
µ
µ
µ µ
¶
¶
¶
µ
¶¶
1
h
1
h
1
h
h
=
f m+
+ f m−
− · f m−
+f m+
2
2
2
2
2
2
2
µ
µ
¶
µ
¶¶
h
1 0
h
1 0
h
+ f m+
− · (− ) f m −
2
2
2
2
2
µ µ
¶
µ
¶¶
h
h
h
= (− ) · f 0 m +
− f0 m −
4
2
2
(6)
(7)
(8)
Nach dem Mittelwertsatz der Differentialrechnung gibt es ein ξh so, dass
µ
¶
µ
¶
h
h
h
h
f0 m +
− f0 m −
= h · f 00 (m + ξh )
− ≤ ξh ≤
2
2
2
2
³ 2´
also D0 (h) = − h4 · f 00 (m + ξh ).
Aus (3) folgt: D(0) = 0 und daher kann D(h) wie folgt dargestellt werden:
Zh
1
D (t) dt = (− )
4
Zh
0
D(h) =
0
t2 · f 00 (m + ξt ) dt
−
0
h
h
≤ ξt ≤
2
2
Mit dem erweiterten Mittelwertsatz (9) der Integralrechnung bekommen wir
1
D(h) = (− ) f 00 (ξk ) ·
4
Zh
0
1
h3
h3
t2 dt = (− ) f 00 (ξk ) ·
= − f 00 (ξk )
4
3
12
xk ≤ ξk ≤ xk+1
Für den Gesamtfehler müssen alle Beiträge D(h) der einzelnen Teilintervalle addiert werden:
xk+1
n−1
n−1
X Z
h3 X 00
f (x) dx − Tk (h) = −
f (ξk )
12
k=0
Betrachte den Mittelwert M :=
1
n
k=0
xk
n−1
P
f 00 (ξk ). Falls f 00 stetig in [a, b], muss es wiederum ein ξ ∈ [a, b] geben,
k=0
so dass M = f 00 (ξ) (wegen dem Mittelwertsatz der Integralrechnung).
Zb
=⇒
f (x) dx − T (h) = −
a
b − a 2 00
h3
n f 00 (ξ) = −
h f (ξ)
12
12
da
n·h=b−a
¤
zhaw
ungr/trapez_begr.tex
MLAN3
3
METHODE VON SIMPSON
3
2.2 Erweiterter Mittelwertsatz der Integralrechung
Sind f und g im Intervall [a, b] stetig und gilt g(x) ≥ 0 für alle x ∈ [a, b], dann existiert ein ξ ∈ (a, b) so dass
gilt:
Zb
(9)
Zb
f (x)g(x) dx = f (ξ)
a
g(x) dx
a < ξ < b,
ξ∈R
a
Beweis: Sei k = Minimum und K = Maximum von f auf [a, b]. So folgt aus k ≤ f (x) ≤ K und der Monotonie
und Linearität des Integrals
Zb
k
Zb
g(x) dx ≤
a
Zb
f (x)g(x) dx ≤ K
a
g(x) dx
a
Es gibt also ein η ∈ [k, K] mit
Zb
Zb
f (x)g(x) dx = η
a
g(x) dx
a
und aus dem Zwischenwertsatz folgt, dass es ein ξ ∈ (a, b) mit f (ξ) = η gibt.
¤
3 Methode von Simpson
Auch hier betrachten wir der Einfachheit halber eine äquidistante Zerlegung von [a, b]. Für diese Methode ist
allerdings immer eine gerade Anzahl Teilintervalle erforderlich.
Satz 2 Simpson
Sei ∆x = h = b−a
2n , Stützstellen xk = a + k · ∆x, k = 0, 1, 2, . . . , 2n mit den Stützwerten yk = f (xk ).
Die Methode von Simpson liefert den Näherungswert
S(h) =
h
· (y0 + 4 y1 + 2 y2 + . . . + 2 y2n−2 + 4 y2n−1 + y2n )
3
Für den dabei gemachten Integrationsfehler gilt:
(10)
|I − S(h)| =
b − a 4 (4)
h |f (ξ)|
180
wobei
a≤ξ≤b
Bemerkung 3 Abschätzung
Da ξ unbekannt, kann für eine gewisse Genauigkeit die erforderliche Schrittweite h nur bestimmt werden, falls
|f (4) (x)| in [a, b] nach oben abgeschätzt wird, d.h.
|I − S(h)| ≤
b−a 4
h M
180
wobei M := max |f (4) (x)|
a≤x≤b
Bemerkung 4
Für Polynome vom Grad n = 3 gilt: Integrationsfehler ist identisch Null, da die vierte Ableitung verschwindet.
Bemerkung 5
Die Methode von Simpson ist auch unter dem Namen „Fassregel von Kepler“ bekannt: für das Volumen eines
Körpers gilt: V = h6 (G + 4 · M + D), wobei h = Höhe des Körpers, G = Flächeninhalt der Grundfläche,
D = Flächeninhalt der Deckfläche und M = Flächeninhalt des Körperquerschnitts auf halber Höhe.
zhaw
ungr/trapez_begr.tex
MLAN3
3
METHODE VON SIMPSON
4
Aufgabe 1
I=
R2
(x3 + 2x2 + 1) dx
0
a) Analytisch.
b) Mit der Methode von Simpson für h = 1.
c) Wie gross ist bei b) der Integrationsfehler? (mit Begründung)
Aufgabe 2
Wie gross muss h sein, damit das Integral
Z100
I=
0
dx
1 + x2
mit der Methode von Simpson bis auf einen Fehler ε < 10−6 berechnet werden kann?
a) Bestimmung von h.
b) Verifikation durch Integration mit h aus a) nach Simpson.
3.1 Beweis von (10)
Der Beweis läuft analog zu demjenigen für die Trapezmethode. Mit denselben Bezeichnungen haben wir
m+ h
2
Z
(11)
D(h) =
f (x) dx −
h
3
µ µ
¶
µ
¶¶
h
h
f m−
+ 4 f (m) + f m +
2
2
m− h
2
zhaw
ungr/trapez_begr.tex