Team Speed-City
Werbung

Team Speed City
Verfasser:
Matthias Klein
Christian Teicht
Betreuer:
Herbert Flindt
Osterburken im Juni 2010
Inhaltsverzeichnis
1
2
3
4
5
6
Der ASURO .................................................................................... - 3 1.1
Allgemeines............................................................................. - 3 -
1.2
Programmierung ..................................................................... - 3 -
1.3
Programme auf den ASURO übertragen................................. - 4 -
1.4
Hardware................................................................................. - 4 -
1.4.1
IR-Transceiver ................................................................. - 4 -
1.4.2
Linienverfolgung ............................................................... - 5 -
1.4.3
Antriebe............................................................................ - 5 -
1.4.4
Odometrie ........................................................................ - 6 -
1.4.5
Taster ............................................................................... - 6 -
1.4.6
StatusLED ........................................................................ - 6 -
1.4.7
BackLEDs ........................................................................ - 7 -
1.4.8
ATmega 8 ........................................................................ - 7 -
Fototransistor ................................................................................. - 7 2.1
Technische Daten ................................................................... - 7 -
2.2
Funktionsprinzip ...................................................................... - 8 -
2.3
Anwendung im ASURO ........................................................... - 9 -
Microcontroller .............................................................................. - 11 3.1
Der „Casino-Chip“ ................................................................. - 11 -
3.2
Der „Polizei-Chip“ .................................................................. - 11 -
H-Brückenschaltung im ASURO-Motor ........................................ - 13 4.1
Vorwärtsfahren des linken ASURO-Motor ............................. - 13 -
4.2
Rückwärtsfahren des linken ASURO-Motor .......................... - 14 -
4.3
Motorprogrammierung ........................................................... - 15 -
4.4
H-Brückenschaltung im Projekt ............................................. - 16 -
Das Projekt „Team Speed-City“.................................................... - 17 5.1
Projektidee ............................................................................ - 17 -
5.2
Projektablauf ......................................................................... - 17 -
5.3
Probleme während des Projekts ........................................... - 18 -
Ehrenwörtliche Erklärung ............................................................. - 19 -
Team Speed City
I
Abbildungsverzeichnis
Abbildung 1 IR-Transceiver…………………….…………….……………..- 4 Abbildung 2 Odometrie/Antrieb……………………………….…………….- 5 Abbildung 3 Taster …………………….…………….….………….……….- 6 Abbildung 4 Fotodiode 1…………………….…………….…..…………….- 8 Abbildung 5 Fotodiode 2…………………….………………...…………….- 8 Abbildung - Lichteinfall-Fotostrom ….……………….…..…….……..……- 9 Abbildung 7-Linienverfolgung…………………….……………...…………- 9 Abbildung 8-Schaltplan Liniensensoren …………………….….………....- 9 Abbildung 9-Skizze Linienverfolgung ……………………..………….….- 10 Abbildung 10- Quellcode -Timer .......................................................... - 11 Abbildung 11 Schaltplan ASUROMotor links…………………………….- 13 Abbildung 12 ASURO-Motor links vorwärtsdrehend ............................ - 14 Abbildung 13 ASURO-Motor links rückwärtsdrehend .......................... - 14 Abbildung 14 Programmausschnitt Motor............................................ - 15 Abbildung 15 Brücke mit Microtaster ................................................... - 16 Abbildung 16 Komplettes Projekt......................................................... - 18 -
Team Speed City
II
1 Der ASURO
1.1 Allgemeines
Der ASURO wurde vom Deutschen Zentrum für Luft- und Raumfahrt entwickelt.
Es handelt sich dabei um einen Roboter, den man in der Hochsprache C
programmieren kann. Im Internet kann man den Roboter als Bausatz für ca. 40
Euro erwerben. Der Roboter ist auch vormontiert erhältlich.
Wir haben den Roboter in der Firma Ziehl-Abegg in Künzelsau zusammengelötet.
Nach ca. 5 Stunden Lötarbeit ist der Roboter fertig gestellt.
1.2 Programmierung
Der Roboter wird in der Hochsprache C programmiert.
Diese Hochsprache wird dann von einem Compiler zunächst in Assemblersprache
und anschließend in einen Maschinencode umgewandelt.
Das Besondere an der Hochsprache ist ihre plattformunabhängige Syntax. Die
einzelnen Befehle des Assemblercodes sind hingegen nur speziell für die jeweilige
Prozessorplattform ausgelegt. Daher macht es Sinn, in C zu programmieren, sollte
man beispielsweise von einem Mikroprozessor auf einen anderen umsteigen, so
muss man lediglich den Compiler wechseln und nicht einen komplett neuen
Syntax erlernen.
Der Compiler benötigt bestimme Bibliotheken, diese werden mit dem Bausatz
mitgeliefert. Zudem sind aktualisierte Versionen im Internet verfügbar.
Durch diese Bibliotheken ist man in der Lage, den ASURO zu programmieren,
auch wenn man keine genaueren Kenntnisse von Mikrokontrollern besitzt.
In vorprogrammierten Prozeduren werden die einzelnen Pins des Controllers
angesteuert. Also anstatt selbst zu überlegen, welchen Pin man in welchen
Register des Controllers durch Bitmanipulation wie beeinflusst, um die Status-LED
auf „grün“ zu schalten, lässt sich dieser Vorgang auch durch den Aufruf der
Funktion StatusLED (unsigned char color) mir den Übergabeparameter „GREEN“
realisieren.
Team Speed City
-3-
Abschließend ist zu sagen, dass man den ASURO am Ende eines Programms in
einer Endlosschleife abfängt, um ungewünschte Handlungen desselben zu
verhindern.
1.3 Programme auf den ASURO übertragen
Dieses vermeintlich einfache Thema erhält aufgrund des großen Ärgers, den es
bereits verursachte, einen eigenen Unterpunkt.
In der Standardversion des ASURO ist es üblich, dass man die erzeugten
Binärcodes mit Hilfe des mitgelieferten Infrarotflashers auf den ASURO überträgt.
Da Infrarotlicht, das aus der Umgebung kommt (z.B. von Neonröhren), diesen
Vorgang deutlich stören kann, haben wir uns ein ISP-Programmiergerät an der
FH-Künzelsau gebaut. Dieses ermöglicht es, Programme mit einer
Kabelsteckverbindung direkt auf den ASURO aufzuspielen. Abgesehen von einem
kleinen Geschwindigkeitsvorteil und einer stabileren Verbindung zwischen ASURO
und PC bringt diese Variante auch noch mehr Speicherplatz mit sich, da das
vorinstallierte Programm (der Bootloader), der für die Infrarotkommunikation
notwendig ist, nicht mehr benötigt wird.
1.4 Hardware
1.4.1 IR-Transceiver
Der IR-Transceiver (Abbildung 1 IR-Transceiver)
wird über den COM-Port an den PC
angeschlossen (zumindest unsere Version) die
Signale werden dann auf den ASURO mittels IRLED (senden) und IR-Fototransistor (empfangen)
übertragen.Die IR-LED weist eine Wellenlänge von
Abbildung 1 IR-Transceiver
ca. 950nm auf.Die Übertragungsgeschwindigkeit beträgt 2400 Baud (2400
„Symbole“/sec).
Team Speed City
-4-
Auf dem ASURO sind ebenfalls ein IR-Fototransistor und eine IR-LED installiert,
somit ist also eine beidseitige Kommunikation zwischen ASURO und PC möglich.
1.4.2 Linienverfolgung
Der ASURO verfügt über zwei Fototransistoren. Zwischen diesen als Sensoren
fungierenden Bauelementen befindet sich eine an- und abschaltbare rote LED.
(Der Befehl um diese anzusteuern lautet FrontLED(ON/OFF).
Um die Liniendaten einzulesen benutzt man den Befehl LineData(array).
In das Array werden nun zwei Zahlen gespeichert. Die erste steht für den
Helligkeitswert des linken, die zweite für den des rechten Sensors.
Es handelt sich dabei jeweils um 8-Bit Variablen. Daraus folgt, dass der ASURO
maximal 256 Helligkeitsstufen unterscheiden kann (2^8=256; 0 = dunkel,
255=hell).
1.4.3 Antriebe
Der ASURO verfügt über zwei Motoren(Abbildung 2 Odometrie/Antrieb). Deren
zugeführte elektrische Leistung ist unabhängig voneinander mit Hilfe der Funktion
MotorSpeed(Wert 1. Motor, Wert 2. Motor) regelbar. Zudem ist die Drehrichtung
der Motoren verstellbar.
Dabei stehen die
Optionen vorwärts,
rückwärts, Leerlauf und
Bremsen zur Verfügung.
Abbildung 2
Odometrie/Antrieb
Team Speed City
-5-
1.4.4 Odometrie
Am Getriebe des ASURO sind Scheiben aufgeklebt.
Drehen sich diese, so bewegen sich hell-dunkel-Wechsel an den
Odometriesensoren vorbei. Diese lassen sich durch entsprechende Programme
auswerten. Somit ist es beispielsweise möglich, die Strecke die der ASURO
abgefahren hat, zu rekonstruieren.
Will man die Odometrietechnik nutzen, so sollte man unbedingt die Scheiben auf
einen konstanten Abstand von den Sensoren bringen und durch ein passendes
Gehäuse vom Umgebungslicht abschirmen.
Darüber hinaus sind die sogenannten BackLEDs während dem Betrieb der
Odometrietechnik nicht einsetzbar.
1.4.5 Taster
Der ASURO verfügt über mehrere
Taster(Abbildung 3 Taster). Diese lassen
sich über die Funktion PollSwitch()
abrufen. Um Pins zu sparen hat man an
jeden Taster einen verschiedenen
Widerstand angeschlossen, der dann mit
Abbildung 3 Taster
einem anderen (immer dem gleichen)
einen Spannungsteiler realisiert. Somit ist es möglich, durch auslesen der
Spannung am entsprechenden Pin des Prozessors den gedrückten Schalter zu
ermitteln.
1.4.6 StatusLED
Der ASURO verfügt über eine StatusLED. In dieser sind um genau zu sein zwei
LEDs installiert: eine Rote und eine Grüne. Schaltet man nun beide gleichzeitig
ein, so erhält man eine dritte Farbe: Gelb. Die StatusLED steuert man über die
Funktion StatusLED(); an.
Team Speed City
-6-
Mögliche Übergabeparameter sind: OFF, GREEN, RED, YELLOW. Die StatusLED
hat uns persönlich bei der Programmierung sehr geholfen, da man sie einsetzen
konnte, um anzuzeigen in welchen Programmteil sich der ASURO gerade
befindet, welche Werte die Sensoren zurückliefern etc.
1.4.7 BackLEDs
Am hinteren Teil des ASURO befinden sich zwei BackLEDs. Diese kann man mit
der Funktion BackLED(Parameter1, Parameter2) ansteuern. Die möglichen
Parameter sind ON bzw. OFF. Die BackLEDs lassen nicht parallel zur
Odometriemessung einsetzen. Wir haben an unserem ASURO eine dieser
BackLEDs und ihren Vorwiderstand entfernt und durch eine Astabile Kippstufe
ersetzt. Diese fungiert als Blaulicht.
1.4.8 ATmega 8
Auf dem Prozessor fungiert der Mikrocontroller ATmega8 als Schaltzentrale. Auf
ihn wird das Programm, das der ASURO ausführen soll, geflasht. Im Allgemeinen
ist zu sagen, dass der ATmega 8 über 23 I/O-Ports verfügt. Dabei handelt es sich
um Pins die entweder als Eingang oder Ausgang fungieren. Bei einem Eingang,
kann der ASURO prüfen, ob die Betriebsspannung an dem Beinchen anliegt oder
nicht. Bei einem Ausgang kann der Prozessor selbst eine Spannung auf den Pin
geben oder ihn auf Masse schalten. Darüber hinaus verfügen manche Pins über
„Spezialfähigkeiten“, beispielsweise können die Pins des Port C die Spannung mit
einer Auflösung (8 Bit / 10 Bit)einlesen, als Referenz dient dabei die
Betriebsspannung, die man an einen separaten Pin anlegen muss.
Christian Teicht & Matthias Klein
2 Fototransistor
2.1 Technische Daten
Der Fototransistor im ASURO trägt die Bezeichnung SFH300 und wird unter
anderem von der Firma Siemens hergestellt.
Es handelt sich dabei um einen npn-Silizium-Fototransistor.
Team Speed City
-7-
Der Fototransistor reagiert auf Licht in dem Wellenlängenbereich von 420 bis
1130nm, besonders gut, jedoch auf Licht der Wellenlänge 850-870nm.
Der maximale Kollektorstrom liegt bei 50mA, kurzzeitige Stromspitzen von 100mA
sind möglich. Der Transistor hat eine maximale Verlustleistung von 200mW, alles
was darüber liegt, würde ihn mehr oder weniger schnell zerstören.
Beim Einlöten sollte man aufpassen, dass die maximale Löttemperatur von 300°C
nicht länger als drei Sekunden anliegen darf, da der Fototransistor ansonsten
ebenfalls zerstört wird. Die maximale Kollektor-Emitterspannung wird von Siemens
mit 35 V angegeben. Der Fototransistor hat zudem einen Halbwinkel von +/- 25°.
2.2 Funktionsprinzip
Bei einem Fototransistor handelt es sich um ein
Bauteil, das, grob formuliert, eine Fotodiode und
einen Transistor vereint. Dabei ist die Fotodiode
parallel zur Kollektor-Basis-Strecke in
Sperrrichtung verbaut. Die Sperrschicht der
Abbildung 4 Fotodiode 1
Fotodiode ist dabei so konstruiert, dass sie für das
Licht gut zugänglich ist. Fällt kein Licht auf die Diode, so existiert in der Mitte eine
Sperrschicht und es sind keine freien Ladungsträger verfügbar. Es kann somit kein
Strom fließen (Abbildung 4 Fotodiode 1).
Treffen nun Photonen mit einer
ausreichenden Energie in die Sperrschicht
(bei Silizium ca. 1,1 eV) so reicht deren
Energie aus, um Elektronen aus dem
Kristallgitter zu „schießen“. Dadurch
entstehen sowohl negative geladene
Abbildung 5-Fotodiode 2
Elektronen als auch positive Löcher als freie
Ladungsträger (Abbildung 5 Fotodiode 2).
Team Speed City
-8-
Dadurch kann ein Strom fließen,
dieser ist proportional zu der
Anzahl der auftreffenden Photonen
(mit der ausreichenden Energie)
(Abbildung 6- LichteinfallFotostrom) und wird durch den
Transistor um ca. den Faktor 100
verstärkt. Der Nachteil des
Fototransistors besteht in der längeren
Abbildung 6- Lichteinfall-Fotostrom
Schaltzeit, die er gegenüber einer normalen Fotodiode besitzt, dafür ist sein Signal
ausreichend, um Schaltungen im mA-Bereich direkt anzusteuern.
2.3 Anwendung im ASURO
Auf der Unterseite des ASURO sind
zwei Fototransistoren dieses Typs
verbaut (Abbildung 7-Linienverfolgung).
In der Mitte befindet sich eine rote LED.
Das Licht der roten LED hat eine
Wellenlänge von ca.620-630nm, somit
sollten die Fototransistoren relativ gut
Abbildung 7-Linienverfolgung
darauf ansprechen.
Mit Hilfe der Sensoren ist es möglich,
den Boden unter dem ASURO auf seine „Helligkeit
abzutasten“. Bei dieser Formulierung sollte man
allerdings vorsichtig sein, da z.B. reflektierende
Materialien nicht unbedingt hell sind, aber das Licht der
LED so reflektieren, dass man es fälschlicherweisse als
das eines hellen Bodens wahrnehmen könnte.
Abbildung 8-Schaltplan
Liniensensoren
Team Speed City
-9-
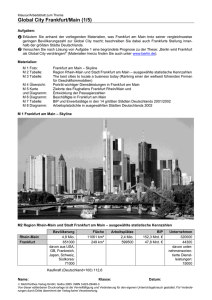
Wie auf dem Schaltplan erkennbar ist, ist der Fototransistor mir einem relativ
großen Widerstand in Reihe geschaltet (Abbildung 8-Schaltplan Liniensensoren).
Zwischen dem Fototransistor und dem Widerstand ist der Pin des ATmega8
angeschlossen, mit dem der Analog-Digitalwandler realisiert wird.
Fällt jetzt Licht auf den Fototransistor, so lässt er einen bestimmten Strom
passieren, dieser ist (ziemlich) proportional zu der auftreffenden Lichtmenge. Um
diesen Strom I durch den Widerstand R (auf der Abbildung R14 bzw. R15) zu
leiten, ist nach dem ohmschen Gesetz die Spannung U=I*R notwendig, der Rest
der Betriebsspannung liegt dann logischerweise am Fototransistor an.
Die gemessene Spannung zwischen Pin und Masse ist also proportional zum
Strom I, der durch den Widerstand und den Fototransistor fließt
(Proportionalitätfaktor= U/I=R). Daraus folgt, dass man mit Hilfe des AnalogDigitalwandlers des Atmega8 eine Spannung ablesen kann, die bei hohem
Lichteinfall in etwa der maximalen Betriebsspannung entspricht und bei absoluter
Dunkelheit in etwa 0 V beträgt.
Dazwischen befinden sich dann die einzelnen Helligkeitsabstufungen, bei denen
ein großer Wert einem starken Lichteinfall und umgekehrt entspricht.
Da die Fototransistoren einen Halbwinkel
von 25° besitzen, ist gewährleistet, dass
sich ihr „Sicherbereich“ bei normaler Höhe
des ASURO nicht überlappt. (Abbildung 9Skizze Linienverfolgung).
Somit ist es möglich, verschiedene
Untergrundhelligkeiten einem der beiden
Liniensensoren zuzuordnen. Dies macht
z.B. eine Linienverfolgung realisierbar.
Abbildung 9-Skizze Linienverfolgung
Team Speed City
- 10 -
3 Microcontroller
3.1 Der „Casino-Chip“
Bei dem Chip, der den Casino Schriftzug steuert, handelt es sich um einen
ATmega8. Auf diesem läuft eine Endlosschleife, bei der ein Zähler bei jedem
Durchlauf erhöht wird. Nach jedem Durchlauf pausiert der Chip eine gewisse Zeit.
Je nach Stand dieses Counters werden dann die einzelnen Ausgänge des Chips
an- bzw. abgeschaltet (also auf „high“ oder „low“ gelegt).
Dabei sind im Datenrichtungsregister (DDR- „Data Direction Register) alle
Ausgänge des entsprechenden Ports auf „high“ gelegt, somit handelt es sich bei
jedem Pin des Ports um einen Ausgang. Hat der Zähler einen bestimmten Stand
erreicht, so wird er wieder zurückgesetzt.
Nach dem gleichen Prinzip funktioniert auch die Ampelschaltung, die ebenfalls von
dem ATmega 8 des Casinos gesteuert wird.
3.2 Der „Polizei-Chip“
Bei dem „Polizei-Chip“ handelt es sich praktisch um das Gehirn der Rennstrecke.
Er befindet sich ebenfalls in einer Endlosschleife, an deren Anfang eine kurze
Pause steht (dies ermöglicht es, auf relativ konstante Zeitwerte zurückzugreifen,
so entsprechen 0,2 Sekunden zwei Schleifendurchläufen, d.h. ein interner Timer
muss bis zwei zählen, dann ist die Zeit 0,2 Sekunden verstrichen).
Das Hauptprogramm ist aus mehreren Timern aufgebaut.
Ein Timer sieht in etwas so aus:
if(timerls1)
//timer für die jeweiligen lichtschranken
{
lst1++;
}
if(lst1==10)
{
timerls1=0;
lst1=0;
}
Abbildung 10- Quellcode -Timer
Team Speed City
- 11 -
Dieser Timer (Abbildung 10 Quellcode Timer) dient beispielsweise dazu, die
Lichtschranken nach Auslösung eine Sekunde lang zu deaktivieren, ansonsten
würde man mehrmals bei einer Durchfahrt durch die Lichtschranke geblitzt
werden. Solange der Timer aktiv ist, gilt „timerls1“ ist ungleich null, nach 10
Durchläufen wird der Timer deaktiviert und der Zähler (hier lst1) zurückgesetzt.
Am Anfang des Schleifendurchlaufes liest der Mikrocontroller die jeweiligen
Zustände seiner Eingänge (ASURO da? Lichtschranken, Ampel=rot? etc.) ein.
Anschließend aktiviert er die entsprechenden Timer.
Ist ein Timer abgelaufen aktiviert er den nächsten Timer, so folgt nach dem Timer,
der die Signale auf den Roboter mittels Lichtblinker im Boden überträgt, der Timer,
der die ASURO-Erkennung deaktiviert. Ansonsten würde die „Zentrale“ den
ASURO noch beim wegfahren als einparkend erkennen, dies hätte zur Folge,
dass der eingeparkt-Timer aktiviert wird. Dieser ist dafür zuständig, dass ein
kurzer Moment abgewartet wird, nachdem die ASURO den LDR im Boden
verdeckt haben, bis sie als wartend erkannt werden (der ASURO muss ja noch
drehen ehe er in den Modus schaltet, in dem er wieder Signale empfangen kann).
Im Groben ergibt sich dadurch folgendes Sinnschaubild:
Lichtschranke unterbrochen? (+Ampel ist rot bei Ampellichtschranke)
Ja Blitzer für 0,1 Sek. aktivieren; prüfen ob Polizeieinheiten für entsprechenden
Einsatz verfügbar?
Einheiten verfügbarBlinksignale abgeben;
Danach: Warten bis die ASURO weggefahren sind;
ASURO-Erkennung aktivieren, d.h. erfassen, ob sie wieder verfügbar sind
Christian Teicht
Team Speed City
- 12 -
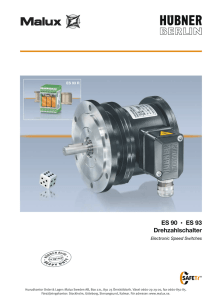
4 H-Brückenschaltung im ASURO-Motor
Abbildung 11-Schaltplan ASURO-Motor links
Die so genannte H-Schaltung befindet sich im ASURO zu einem ganz simplen
Zweck. Mit ihr werden die beiden Motoren so angesteuert, dass diese vorwärts,
oder rückwärts laufen. Wie man in Abbildung 11 sehen kann, besteht jeweils ein
Motor aus vier Transistoren (2 pnp und 2 npn Transistoren), 4 x 1K
Schutzwiderständen für die Transistoren, 4 x Freilaufdioden, die einen
Kurzschluss bei einer falsch angeschlossener Stromquelle verhindern und 2 UNDGattern die dann durchschalten, wenn an beiden Eingängen (12/13, oder 1/2) das
gleiche Signal ankommt, ansonsten sind diese geschlossen.
4.1 Vorwärtsfahren des linken ASURO-Motor
Transistor T1 ist durchgeschaltet (da pnp bei low schaltet und PD4 auf low gesetzt
ist) und dadurch Linie 12 am linken UND-Gatter auf low. Nun PD5 auf high,
dadurch Linie 2 an UND-Gatter auf high. Dabei sperrt Transistor T3, da pnp. Wird
PB1 ebenfalls auf high gesetzt, öffnet das UND-Gatter und Transistor T4 schaltet
durch, weil Linie 13 an UND-Gatter auf high ist und das Gatter somit geschlossen
bleibt. Es kann nun also ein Strom fließen, der den Motor vorwärts drehen lässt.
Team Speed City
- 13 -
Abbildung 12 ASURO-Motor links vorwärtsdrehend
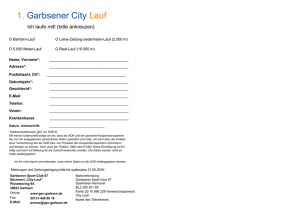
4.2 Rückwärtsfahren des linken ASURO-Motor
Möchte man nun, dass sich der ASURO-Motor genau entgegengesetzt dreht, setzt
man PD5 auf low und Transistor T3 schaltet durch, wobei am rechten UND-Gatter
auf Linie 2 ebenfalls low anliegt. Des Weiteren wird PB1 und PD4 auf high gelegt,
sodass Transistor T2 öffnet und Transistor T4 geschlossen bleibt, da am
dementsprechenden UND-Gatter zwei ungleiche Signale anliegen. Nun dreht sich
der Motor wie gewollt rückwärts.
Abbildung 13 ASURO-Motor links rückwärtsdrehend
Team Speed City
- 14 -
Vorwärts- und Rückwärtsfahren sind vom linken zum rechten Motor analog
übertragbar mit Ausnahme, dass PB1 am linken Motor PB2 am Rechten
entspricht, PD4 zu PB4 wird und PD5 zu PB5 geändert werden muss.
Wird der Motor richtig angesteuert dreht er sofort mit „Vollgas“. Um seine
Geschwindigkeit zu drosseln, werden die vom Microcontroller ausgegebenen
Signale je nach Bedarf kürzer getaktet. So kann die Geschwindigkeit verändert
werden.
4.3 Motorprogrammierung
Abbildung 14 Programmausschnitt Motor 1
1
Ähnlich Motorbrückenprogrammierung ASURO-WIKI
Team Speed City
- 15 -
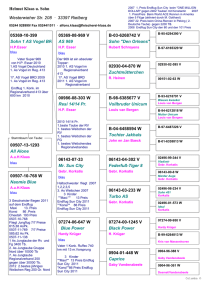
4.4 H-Brückenschaltung im Projekt
Im Projekt wurde die H-Brückenschaltung dazu benutzt, um die Brücke vor dem
Casinogebäude mit Hilfe des Microcontrollers selbstständig hoch bzw. herunterfahren zu lassen. Diese Schaltung ist unter der Brücke angebracht und mit der des
ASURO vergleichbar (jedoch ohne UND-Gatter und Freilaufdioden). Über den
Casinochip wird die Brücke fünf Sekunden so angesteuert, dass die dafür
vorgesehenen Transistoren durchschalten und die Brücke nach oben fährt. Würde
man ein Signal ausgeben, das die Brücke fünf Sekunden herunterfahren lässt,
besteht die Gefahr, dass die hochgeklappte Plattform nicht mit der waagrecht
angebrachten Platte bündig abschließt. Das würde eine Beeinträchtigung des
Fahrspaßes darstellen. Deshalb gibt der Microcontroller 20 Sekunden lang ein
Signal aus, welches die Brücke herunter fahren lässt. Der an der Oberfläche
angebrachte Microtaster dient dazu, dass er das vom Microcontroller gelieferte
Signal unterbricht, sobald die hochgeklappte Platte beim Herunterfahren auf ihm
aufliegt. Das Signal wird weiterhin ausgegeben, aber der Motor stopp. Somit liegt
die heruntergefahrene Platte bündig zur fest installierten Platte gegenüber.
Abbildung 15 Brücke mit Microtaster
Matthias Klein
Team Speed City
- 16 -
5 Das Projekt „Team Speed-City“
5.1 Projektidee
Schon gleich nach dem Auftaktseminar bei der BBQ in Heilbronn machten wir uns
Gedanken über unser zukünftiges Projekt. Was wollen wir einfließen lassen? Soll
es eher etwas mit Programmierung zu tun haben? Nach einiger Zeit zeichnete
sich ab, dass es ein sehr interessantes und zugleich anschauliches SIA-Projekt
werden soll, bei dem wir beide auf unterschiedliche Art und Weise unser Bestes
geben können. Wir legten also am Anfang von 2010 mit den ersten Entwürfen los,
die zu Beginn auf dem Zimmerboden stattfanden. Während dieser
Entstehungsphase kamen wir zu unserem Entschluss wie das Projekt nun werden
sollte. Ein Mix aus „Selberspielen“, verknüpft mit Technik, Lichtelementen und
beweglichen Gegenständen.
So entstand im Laufe der Zeit unser Projekt. Eine Holzplatte mit den Maßen 2m x
1.7m. Darauf ein Casinogebäude mit einem LED-Schriftzug aus knapp 50 roten
LEDs, ein Polizeigebäude mit eingebauter ASURO-Erkennung und
Signalausgabe, sowie eine Klappbrücke, die automatisch auf und ab gesteuert
werden kann. Außerdem wurde eine Akkuladestation eingebaut um dauerhaften
Fahrspaß zu gewährleisten, der durch ferngesteuerte Mini-Autos geboten werden
soll.
5.2 Projektablauf
Wir fingen also an, unsere Pläne in die Tat umzusetzen und richteten uns in der
eigenen Scheune mit angrenzender Werkstatt ein. Es wurde gesägt, gebohrt und
gehämmert, bis es dunkel war. Jeden Tag sah man einen kleinen Fortschritt.
Langsam nahm das Projekt „Team Speed City“ Gestalt an und die verlegten Kabel
wurden mehr und mehr. Es wurde weiter fleißig gelötet (manchmal auch zum Leid
der Bauelemente, die danach nicht mehr ganz ihren Zweck erfüllen konnten).
Nach etlichen Überstunden, die wir neben der Schulzeit einlegten, wurde das
Projekt nach und nach fertig gestellt.
Team Speed City
- 17 -
5.3 Probleme während des Projekts
Unser wohl größtes Problem war wie immer die Zeit, die sich teilweise von alleine
um eine Stunde vorstellte, ohne dass wir davon Kenntnis nehmen konnten. Dazu
kam noch, dass die meisten Schaltpläne nie auf einem Blatt Papier zu sehen
waren (und auch sein werden). Außerdem war für uns unbekannt mit zwei
unterschiedlichen Spannungen gleichzeitig zu arbeiten, was dem Projekt aber
keinesfalls einen Abbruch tat. Im Gegenteil: Es spornte uns oftmals sogar an.
Dennoch kann man als positives Fazit hervorheben, dass wir früh genug
angefangen haben und dadurch rechtzeitig fertig geworden sind, wenn es auch
zum Ende hin etwas knapp wurde. Außerdem haben wir uns als TEAM prima
ergänzt und optimal verstanden.
Abbildung 16 Komplettes Projekt
Abschließend ist zu sagen, dass uns das Projekt sehr viel Spaß gemacht hat und
wir viele neue Erkenntnisse dazu gewonnen haben, als „Schüler-Ingenieure“ bei
dieser Akademie.
Christian Teicht & Matthias Klein
Team Speed City
- 18 -
6
Ehrenwörtliche Erklärung
Wir versichern durch unsere Unterschrift, dass wir die vorstehende Arbeit
selbstständig und ohne fremde Hilfe angefertigt, alle Stellen, die wir wörtlich oder
annähernd wörtlich aus Veröffentlichungen entnommen, als solche kenntlich
gemacht und wir auch keiner anderen als der angegebenen Literatur oder
sonstiger Hilfsmittel bedient haben. Die Arbeit hat in dieser oder in ähnlicher Form
noch keiner anderen Prüfungsbehörde vorgelegen.
SIA
Schüler-Ingenieur-Akademie
_______________________
_______________________
Christian Teicht
Matthias Klein
Osterburken, den 5.07.2010
Team Speed City
- 19 -