RLC-Schaltungen mit „kompliziert“ aufzustellenden DGLn
Werbung

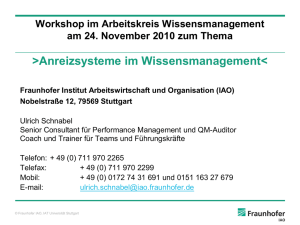
R. Kessler, D:\579911612.doc, Seite 1 /13 Homepage: http://www.home.hs-karlsruhe.de/~kero0001/ RLC-Schaltungen mit „kompliziert“ aufzustellenden DGLn In diesem Text werden für die auf dieser Seite zusammengestellten 12 RLC-Schaltungen die DifferentialGleichungen (abgekürt DGLn) aufgestellt. Zu jeder Schaltung wird ein Algorithmus zum numerischen Lösen der DGLn formuliert. Die Algorithmen können mit dem Programm Tephys ausgeführt werden. Sowohl die Dateien mit den Algorithmen als auch das Programm Tephys können runtergeladen werden. Die Eingangspannung u0 kann beliebige Zeitfunktion u0(t) haben, für die Schaltelemente R, L, C kann man beliebige Werte eingeben ( allerdings L > 0, C > 0). Allen Schaltungen ist gemeinsam, dass das Aufstellen der Differentialgleichungen „kompliziert“ ist, weil (zunächst) mehrere Ableitungen pro Gleichung auftreten. Vgl. dagegen einfachere Schaltungen: http://www.home.hs-karlsruhe.de/~kero0001/aufst6/AufstDGL6hs.html C1 R0 C1 R0 C2 u1 Lk M1 u2 RA u0 uA RLk M1 Nr 1 Hochpass CLC-T-Glied R0 i2 u2 L1 RL1 L2 RL1 L2 RA uA u0 M2 iC1 C1 i1 i1 L3 RA RL1 RL2 M2 M1 uA RL1 M1 M2 RL2 Nr 5 Hochpass, 2 LCL-Pi-Glieder C3 R3 C2 R2 i2 L2 u1 L1 u0 RL3 M3 iC1 C1 R1 R0 i3 u2 L2 L1 u0 R2 i2 u1 L2 uA RL2 M2 Nr 4 Hochpass LCL-Pi C2 R1 RA R1 u RL1 M1 Nr 3 Hochpass, CLC-Pi-Glied R0 uA i2 i1 L1 RL2 M1 C iC R0 u RA M3 Nr 2 Hochpasss 2 CLC-T-Glieder (erschwert infolge R2) i2 i1 u3 RL2 M2 C iC L1 u0 u1 C3 K2 i1 ik u0 C2 R2 K1 u2 i3 L3 i4 u3 i5 u4 L4 RL4 RL3 M3 C5 R5 C4 R4 L6 RA uA RA uA RL6 M6 RL5 M4 i6 u5 L5 M5 Nr 6 Hochpass, 5 LCL-Pi-Glieder ik Lk Ck1 K1 R0 Ck2 K2 R0 K3 Ck u0 i2 i1 u1 L1 C1 uk1 i3 uk2 u2 L2 C2 RL1 u3 L3 C3 RL2 RA uA L1 u0 C1 L1 C2 i1 L2 uk Ck u0 R0 Rk u2 RA uA L1 C1 RL1 M1 M2 u0 RLk Nr 9 Bandpass T i1 L1 u1 M1 u1 K2 R1 uk R2 M2 i2 u2 L2 C2 RA uA RL2 M3 RL2 i2 L2 K R1 C1 R2 C2 C2 ik iC1 Lk Ck ik iC2 R0 ik u0 Lk iC1 RL1 i1 L1 L2 K C1 iC1 u2 C2 Nr 10 Bandpass Pi i2 R0 Ck K1 i1 Lk u1 Nr 8 Bandsperre Pi i2 ik u1 L2 uk C1 RL3 Nr 7 Bandpass 2 Pi-Glieder, kapazitiv gekoppelte Parallel-Schwingkreise R0 i2 i1 u2 uk Nr 11 Bandsperre T RA uA u0 u1 Lk iC2 u2 RLk M1 Ck uk RA M2 Nr 12 Bandsperre T (mit zusätzlichen Widerständen) uA R. Kessler, D:\579911612.doc, Seite 2 /13 Bekanntlich erhält man die Differential-Gleichungen einer aus Widerständen (R), Spulen (L) und Kondensatoren (C) bestehenden elektrischen Schaltung dadurch, dass man für jeden (unabhängigen) „Energiespeicher“ eine „Zustandsvariable“ einführt und durch Anwendung des „Knotensatzes“ (= Ladungs-Erhaltungs-Satz: Summe aller zu einem Knoten fließenden Ströme = 0) und des „Maschensatzes“ (= Energie-Erhaltungs-Satz: Summe aller Spannungen in einer Masche = 0) ein System von DGLn aufstellt, in dem für jede Zustandsvariable je eine DGL erster Ordnung enthalten ist. Dabei dürfen diese DGLn nur je eine Zeitableitung enthalten. Energiespeicher sind die Spulen und die Kondensatoren. Die Widerstände sind keine Energiespeicher, sondern Energieverbraucher. Jeder Spule Lk wird ihr Spulenstrom ik, jedem Kondensator Cj wird die an ihm liegende Spannung uj als Zustandvariable zugeordnet (vgl. die obigen Schaltungen: Dort sind die Zustandsvariablen in die Schaltung eingetragen. Den Widerständen wird keine Zustandsvariable zugeordnet. R i Ru= R * i L i uL= L *di/dt C iC = C * duC/dt Widerstand R : Spannung an R ist uR = R * i Spule L : Spannung an L ist uL = L * di/dt Kondensator C: Strom durch C ist iC = C * duC/dt uC Damit die zu berechnende Schaltung für beliebige Zeitfunktionen der Signalquellen gilt, wird beim Aufstellen der DGLn darauf geachtet, dass nicht nach der Quellspannung u0 differenziert wird, denn die Signalquelle könnte ja eine unstetige Funktion sein, z.B. eine Funktion mit „Sprüngen“ (etwa Rechteckfunktion). Die Zeitableitung eines solchen Sprunges würde an den Sprungstellen unendlich große Werte annehmen, was „physikalisch“ unzulässig wäre. Bei den in diesem Text behandelten Schaltungen ist das Aufstellen der DGLn dadurch erschwert, dass (zunächst) mehrere zeitliche Ableitungen in einer Gleichung auftreten. Durch „physikalische“ Überlegungen, insbesondere sofortige Anwendung des Knotensatzes und durch die „Masche über alles“ und gelegentlich durch Einführen von Hilfsgrößen gelingt es aber, die erforderliche Struktur der DGLn zu erhalten, nämlich nur je eine Ableitung pro Gleichung. Diese Methode zum Aufstellen der DGLn ist viel anschaulicher und einfacher als etwa durch „formales algebraisches“ Lösen eines linearen Gleichungs-Systems (etwa mit Hilfe des Gauß- Algorithmus) die gewünschte Struktur zu erhalten, nämlich nur je eine Ableitung pro Gleichung. Zur Schreibweise in diesem Text: Die zeitliche Ableitung der Größe x wird mit dx/dt bezeichnet, gelegentlich auch abgekürzt als x’ = dx/dt. Ein paar Bemerkungen zur LAPLACE- Transformation: In vielen Texten, insbesondere in der Regelungstechnik und der Systemtheorie, wird die LAPLACETransformation als ein „unentbehrliches“ Mittel angepriesen, um dynamische Vorgänge zu berechnen. Leider ist der zugehörige Aufwand selbst für vergleichsweise simple Schaltungen sehr beachtlich und sehr unanschaulich. Oft wird empfohlen, einen geeigneten Taschenrechner (für einige 100 EURO) zu verwenden. Eine Bitte des Verfassers: Wenn ein geneigter Leser eine der in diesem Text vorgestellten Schaltungen mit seiner geliebten LAPLACE-Transformation zu berechnen in der Lage ist, dann möge er mir bitte per E-Mail seine Ergebnisse mitteilen [email protected] Aber dabei sollten, wie im vorliegenden Text, die Schaltungsparameter (R, L, C) und die Zeitabhängigkeit der Eingangs-Spannung u0(t) „beliebig vorgebbar“ sein. Z.B. u0 = gedämpfter Sinus + Dreieck + Rechteck + Rauschen +... Jetzt einige Bemerkungen zum Simulations-Programm PSPICE. Im Gegensatz zur LAPLACE-Transformation ist die Berechnung dieser Schaltungen mit PSPICE überhaupt kein Problem. Selbst mathematische Laien könnten mit PSPICE diese Schaltungen berechnen und dabei die Parameter nach Herzenslust variieren. Wenn PSPICE das alles so einfach kann: Wozu dann überhaupt die DGLn dieser Schaltungen aufstellen und mit einem geeigneten Simulationsprogramm numerisch lösen? PSPICE hat den Vorteil, dass man die mathematischen Hintergründe nicht zu wissen braucht. Das ist aber eigentlich auch ein Nachteil, denn man versteht eigentlich nicht, wie PSPICE das macht. Ein Nachteil von PSPICE: Es kann (von Haus aus) nur elektrische Schaltungen berechnen, nicht aber etwa mechanische oder etwa thermische. Will man auch solches mit PSPICE berechnen, muss man die Mathematik dieser Vorgänge verstehen und dann PSPICE diese Mathematik „unterjubeln“. Allerdings hat dann PSPICE gegenüber anderen Simulationsprogrammen keinen Vorteil mehr. Auf jeden Fall muss man dann die DGLN aufstellen und numerisch lösen. Drum hier die Übung des Aufstellens der DGLn und der Formulierung eines numerischen Algorithmus. R. Kessler, D:\579911612.doc, Seite 3 /13 1 Hochpass, CLC-T-Glied R0 C1 K C2 ik u0 u1 M1 Lk u2 RA uA RLk Masche über alles: u0= R0*iR0 + u1 + u2 + RA*iRA mit den Strömen iR0 und iRA: iR0 = C1*u1’, iRA= C1*u1’ – ik (mit der Abkürzung u1’=du1/dt ) => u0 = R0 *C1*u1’ +u1 +u2 + RA*( C1*u1’ –ik) = ( R0+RA)*C1*u1’ +u1 + u2 – RA*ik => C1 * du1/dt = 1/(R0+RA) * (u0-u1 –u2 + RA* ik ) ( DGL für u1 ) Masche M1: u0 = R0*C1*u1’ + u1 + Lk* dik/dt + RLk*ik => mit Verwendung der obigen Formel für C1*u1’ Lk*dik/dt = u0 – u1 – RLk * ik – R0*/(R0+RA) * (u0 – u1 – u2 + RA* ik ) Knoten K: C2*du2/dt = Strom durch C1 – Strom durch Lk : => C2*du2/dt = 1/(R0+RA) * (u0-u1 –u2 + RA* ik ) – ik ( DGL für ik ) ( DGL für u2 ) Tephys-Algorithmus : d=drei(fd*t) u0 = aP*ja(t-t1)*ja(t2-t) + aD*d + aR*sign(d-sw))+aS*sin(fs*t+phis) u1 = u1+ 1/(R0+RA) * (u0-u1-u2+RA*ik) *dt/C1 ik = ik + ( u0-u1-RLk*ik – R0/(R0+RA)*(u0-u1-u2+RA*ik) )*dt/Lk u2 = u2 + (1/(R0+RA) * (u0-u1 –u2 + RA* ik ) -ik) *dt/C2 uA= RA*( C1/(R0+RA) * (u0-u1-u2+RA*ik) - ik) uA richtig?? t = t+dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} Bemerkungen zu einigen Tephys-Funktionen: ja(x): if x > 0 then ja = 1 else ja = 0 sign(x): if x > 0 then sign = 1 else if x < 0 then sign = -1 else if x = 0 then sign = 0 drei(fd*t) = Dreieck mit Amplitude 1 und Frequenz f d Im obigen Algorithmus ist also die Eingangs-Spannung u0(t) die Addition eines Rechteckimpulses (Höhe aP im Zeitbereich t1 bis t2), einer Dreieckfunktion (Amplitude aD, Frequenz fd), einer Rechteckfunktion (Amplitude +/aR, Frequenz fr) und einer Sinusfunktion (Amplitude aS, Frequenz fs, Phase phis). Der Algorithmus zum Lösen der DGLn erfolgt hier nach dem einfachen Schema: aus dx/dt = F ,=> dx=F*dt => Prinzip des Algorithmus x(neu) = x(alt) + F*dt oder als „Anweisung“ x = x + F*dt , d.h. ersetze den alten Wert von x durch den neuen Wert x + F*dt. R. Kessler, D:\579911612.doc, Seite 4 /13 2 Hochpass 2 CLC-T-Glieder R0 C1 iC1 K1 R2 (Im Vergleich zu Nr 1 mit Erschwernis infolge R2 ) C2 K2 i1 u1 u0 M1 L1 RL1 C3 i2 u2 M2 L2 RL2 u3 RA uA M3 Einführen der Hilfsgröße iC1 ( = Strom durch Kondensator C1, s. Figur). Mit iC1 –i1 = Strom durch R2 und iC1- i1 –i2 = Strom durch RA wird die Masche über alles: u0 = R0*iC1 + u1 + R2*(iC1 – i1) + u2 + u3 + RA * (iC1 – i1 – i2 ) => u0 = (R0 +R2 +RA)* iC1 + u1 –R2*i1 + u2 + u3 - RA*(i1+i2) => iC1 = 1/(R0+R2+RA) * ( u0 – u1 –u2 – u3 + R2*i1 + RA* ( i1+ i2 ) ) => C1*du1/dt = iC1 Masche M1: u0 = R0 * iC1 + u1 + L1*di1/dt + RL1*i1 => L1*di1/dt = u0 – R0*iC1 –u1 - RL1*i1 ( Hilfsgröße iC1 ) ( DGL für u1 ) ( DGL für i1 ) Masche M1+M2: u0 = R0*iC1 +u1 + R2*(iC1 - i1) +u2 + L2*di2/dt +RL2*i2 => L2*di2/dt = u0 - (R0 +R2)*iC1- u1 - u2 + R2*i1 –RL2*i2 ( DGL für i2 ) Knoten K1: C2*du2/dt = iC1 – i1 ( DGL für u2 ) Knoten K2: C3*du3/dt = iC1 – i1 - i2 ( DGL für u3 ) Tephys-Algorithmus mit Runge-Kutta: Tephys-Datei 2_1.txt DGL = 0 {Beginn der Runge-Kutta-Schleife } d = drei(fd*t+del) u0 = aP*ja(t - t1)*ja(t2 - t) + aD*d + aR*sign(d-sw) + aS*sin(2*pi*fS*t+phis) iC1 = 1/(R0+R2+RA) * ( u0 – u1 –u2 – u3 + R2*i1 + RA* ( i1+ i2 ) ) u1 = rk ( iC1/C1 ) i1 = rk ( (u0 – R0*iC1 - u1 – RL1*i1) / L1 ) i2 = rk ( (u0 - (R0 +R2)*iC1- u1 - u2 + R2*i1 – RL2*i2 )/L2 ) u2 = rk ((iC1 –i1)/C2 ) u3 = rk ( (iC1 – i1 –i2)/C3 ) END =0 {Ende der Runge-Kutta-Schleife } uA = RA*(iC1-i1-i2) t = t+dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} Bemerkungen zur Tephys-Formulierung des Runge-Kutta–Algorithmus: Zwischen den Zeilen DGL=0 und END = 0 wird der Runge-Kutta-Algorithmus abgearbeitet. Es liege das DGLSystem dx/dt = A, dy/dt= B, dz/dt = C vor. Dabei können A, B, C irgendwelche Funktionen der Zeit und der gesuchten Größen (hier x, y, z ) sein. Zur Lösung dieses DGL-Systems werden die Formeln x=rk(A), y=rk(B), z=rk(C) zeilenweise zwischen den Zeilen DGL=0 und END=0 eingegeben. R. Kessler, D:\579911612.doc, Seite 5 /13 3 Hochpass LCL-Pi -Glied R0 C iC i1 L1 u RL1 M1 M2 u0 i2 L2 RA uA RL2 Masche über alles: u0 = R0*(i1 + iC) + u + RA*(iC – i2)= (R0+RA)* iC +u + R0*i1- RA* i2 => iC= C* du/dt = 1/(R0+RA) * ( u0-u-R0*i1+RA*i2) Masche M1: u0 = R0*(i1+iC) + L1*di1/dt + RL1* i1 L1*di1/dt = u0 - R0*(i1+iC) – RL1*i1 ( DGL für u ) ( Hilfsgröße iC ) => ( DGL für i1 ) Maschen M1+M2: u0 = R0*(i1+iC) +u +L2*di2/dt + RL2*i2 => L2*di2/dt = u0 – R0 *( i1+iC) – u – RL2 * i2 Ausgangsspannung uA=RA*(iC-i2) ( DGL für i2 ) Tephys-Algorithmus mit Runge- Kutta: DGL = 0 u0 = aP*ja(t-t1)*ja(t2-t) { hier könnten noch weitere Signalfunktionen stehen, vgl. Schaltung 2 } iC = 1/(R0+RA) * ( u0-u-R0*i1+RA*i2) u = rk ( iC/C ) i1 = rk ( (u0 - R0*(i1+iC) – RL1*i1 )/L1 ) i2 = rk ( (u0 – R0 *( i1+iC) – u – RL2 * i2 )/L2 ) END = 0 uA = RA * (iC - i2) t = t+dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} 4 Hochpass LCL-Pi (Im Vergleich zu Nr 3 mit Erschwernis infolge R1 ) iC C R1 R0 i1 u0 L1 RL1 M1 i2 u M2 L2 RA uA RL2 Masche über alles: u0 = R0*(i1+iC) + u + R1*iC + RA*(iC-i2) = R0*i1 + (R0+R1+RA)*iC + u –RA*i2 => iC = C*du/dt = 1/(R0+R1+RA) * ( u0 - R0*i1 – u + RA*i2 ) Masche M1: u0= R0*(i1+iC) +L1*di1/dt + RL1* i1 => L1*di1/dt = u0 – R0*(i1+iC) - RL1*i1 ( DGL für u und Hilfsgröße iC ) ( DGL für i1 ) Maschen M1+M2: u0 = R0*(i1+iC) + u + R1*iC + L2*di2/dt + RL2*i2 => L2*di2/dt = u0 – R0*(i1+iC) - u – R1*iC - RL2*i2 ( DGL für i2 ) Tephys-Algorithmus mit Runge-Kutta: (Tephys-Dateien 4_1.txt, 4_2.txt) DGL = 0 d = drei(fD*t+del) u0 = aP* ja(t-t1)*ja(t2-t)+ aD*d + aR*sign(d-sw) + aS*sin(2*pi*fS+t) iC = 1/(R0+R1+RA) * (u0-R0*i1-u+RA*i2) u = rk(iC/C) i1 = rk( (u0 – R0*(i1+iC) - RL1*i1 )/L1 ) i2 = rk( (u0 – R0*(i1+iC) - u – R1*iC - RL2*i2 )/L2 ) End = 0 uA = RA*(iC-i2) t = t + dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} R. Kessler, D:\579911612.doc, Seite 6 /13 5 Hochpass aus zwei LCL-Pi-Gliedern R0 iC1 i1 u0 C1 C2 R1 R2 i2 u1 L1 L2 RL1 RL2 i3 u2 L3 RA M1 M2 uA RL3 M3 Nr 5 Hochpass, 2 LCL-Pi-Glieder Man wird erkennen, dass nach der folgenden Methode auch für „beliebig viele“ solcher Pi-Glieder die DGLn aufgestellt und gelöst werden können: Masche über alles: u0 = R0*( i1+ iC1 ) + u1 + R1*iC1 + u2 + R2* (iC1 – i2) + RA*( iC1 – i2 - i3 ) => u0 = (R0+R1+R2+RA)*iC1 + R0*i1+ u1 + u2 - R2*i2 – RA*(i2+i3) => iC1 = 1/( R0+R1+R2+RA ) * ( u0 – R0 *i1 –u1 - u2+ R2*i2 + RA*(i2 + i3) ) => C1*du1/dt = iC1 Masche M1: u0 = R0 * (i1 + iC1) + L1* di1/dt + RL1 * i1 => L1 * di1/dt = u0 – R0 * (i1+iC1) – RL1 * i1 ( Hilfsgröße iC1 ) ( DGL für u1 ) ( DGL für i1 ) Maschen M1…M2: u0 = R0*(i1 + iC1) + u1 + R1 * iC1 + L2 * di2/dt + RL2*i2 => L2 * di2/dt = u0 – R0*(i1+iC1) –u1 –R1*iC1 –RL2*i2 ( DGL für i2 ) Maschen M1…M3: u0 = R0*(i1+iC1) + u1 + R1*iC1 + u2 + R2 *( iC1-i2) + L3*di3/dt + RL3*i3 => L3*di3/dt = u0 – (R0 + R1 + R2 )*iC1 – R0*i1 –u1 – u2 + R2*i2 – RL3*i3 ( DGL für i3 ) C2* du2/dt = iC1 – i2 Ausgangsspannung ( DGL für u2 ) uA = RA * ( iC1 - i2 - i3 ) Tephys-Algorithmus mit Runge-Kutta: Tephys-Dateien 5_1.txt, HP2LCL1.txt DGL = 0 d = drei(fD*t+del) u0 = aP * ja(t-t1)*ja(t2-t) +aD*d + aR*sign(d-sw) +aS*sin(2*pi*fS*t) iC1 = 1/( R0+R1+R2+RA ) * ( u0 – R0 *i1 - u1 – u2 + R2*i2 + RA*(i2 + i3) ) u1 = rk (iC1/C1) i1 = rk( ( u0 – R0 * (i1+ iC1) – RL1 * i1 ) / L1) i2 = rk ( (u0 – R0*(i1+iC1) –u1 –R1*iC1 –RL2*i2 )/L2) i3 = rk( (u0 – (R0 + R1 + R2 )*iC1 – R0*i1– u1– u2 + R2*i2– RL3*i3 )/L3) u2 = rk (( iC1 – i2 – i3 )/C2 ) END = 0 uA = RA * (iC1 – i2 – i3 ) t = t + dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} R. Kessler, D:\579911612.doc, Seite 7 /13 6 Hochpass aus 5 LCL-Pi-Gliedern R0 iC1 i1 C1 u1 L1 u0 M1 R1 C2 i2 L2 u2 RL2 RL1 M2 R2 i3 L3 C3 u3 i4 L4 C4 u4 RL4 RL3 M3 R3 M4 R4 i5 L5 C5 R5 i6 u5 L6 uA RL6 RL5 M5 RA M6 An diesem Beispiel aus 5 LCL-Pi-Gliedern soll demonstriert werden, dass die an 2 LCL-Pi-Gliedern benutzte Methode auch für beliebig viele LCL-Pi-Glieder zum Ziele führt, nämlich zum Aufstellen des DGL-Systems Masche über alles: u0 = R0*( i1+ iC1 )+u1+R1*iC1+u2+R2*(iC1–i2) +u3+R3*(iC1-i2-i3) + u4+R4*(iC1-i2-i3-i4)+u5+R5*(iC1-i2-i3-i4-i5)+ RA*( iC1–i2-i3-i4-i5-i6) iC1 ausklammern: u0 = (R0+R1+R2+R3+R4+R5+RA)*iC1+u1+u2+u3+u4+u5 + R0*i1 - (R2+R3+R4+R5+RA)*i2 - (R3+R4+R5+RA)*i3 - (R4+R5+RA)*i4 - (R5+RA)*i5 - RA*i6 => iC1 = 1/( R0+R1+R2+R3+R4+R5+RA ) *( u0 – u1-u2-u3-u4-u5-R0 *i1 + (R2+R3+R4+R5+RA)*i2 + (R3+R4+R5+RA)*i3 +(R4+R5+RA)*i4 +(R5+RA)*i5 +RA*i6 ) { Hilfsgröße iC1 } Mit Hilfe von iC1 können alle DGL des Systems leicht formuliert werden: Zunächst Einführen der „Kondensatorströme“ für die übrigen Kondensatoren: iC2= iC1 - i2; iC3= iC2 - i3; iC4= iC3 - i4; iC5= iC4 - i5; { zusätzliche Hilfsgrößen iC2, iC3, iC4, iC5 } Damit hat man die DGLn für die Kondensatorspannungen u1...u5 : C1*du1/dt = iC1 ; C2*du2/dt = iC2; C3*du3/dt = iC3; C4*du4/dt = iC4; C5*du5/dt = iC5 ( DGLn für u1, u2, u3, u4, u5 ) Aus den Maschen bekommt man die DGLn für die Ströme i1...i6 : M1: M1..M2: M1..M3: M1..M4: M1..M5: M1..M6: u0=R0*(iC1+i1)+L1*di1/dt+RL1*i1 u0=R0*(iC1+i1)+u1+R1*iC1+L2*di2/dt+RL2*i2 u0=R0*(iC1+i1)+u1+R1*iC1+u2+R2*iC2+L3*di3/dt+RL3*i3 u0=R0*(iC1+i1)+u1+R1*iC1+u2+R2*iC2+u3+R3*iC3+L4*di4/dt+RL4*i4 u0=R0*(iC1+i1)+u1+R1*iC1+u2+R2*iC2+u3+R3*iC3+u4+R4*iC4+L5*di5/dt+RL5*i5 u0=R0*(iC1+i1)+u1+R1*iC1+u2+R2*iC2+u3+R3*iC3+u4+R4*iC4+u5+R5*iC5+L6*di6/dt+RL6*i6 Tephys-Algorithmus mit Runge-Kutta: Tephys-Dateien 6_1.txt, 6_2.txt DGL=0 d= drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) Teil1= u0 – u1-u2-u3-u4-u5-R0 *i1 + (R2+R3+R4+R5+RA)*i2 Teil2= (R3+R4+R5+RA)*i3 +(R4+R5+RA)*i4 +(R5+RA)*i5 +RA*i6 iC1= (Teil1+Teil2)/( R0+R1+R2+R3+R4+R5+RA ) iC2= iC1-i1 iC3= iC2-i3 iC4= iC3-i4 iC5= iC4-i5 u1= rk(iC1/C1) u2= rk(iC2/C2) u3= rk(iC3/C3) u4= rk(iC4/C4) u5= rk(iC5/C5) i1= rk((u0-R0*(iC1+i1)-RL1*i1 )/L1) i2= rk((u0-R0*(iC1-i1) - u1-R1*iC1- RL2*i2 )/L2) i3= rk((u0-R0*(iC1+i1) - u1-R1*iC1-u2-R2*iC2 - RL3*i3 )/L3) i4= rk((u0-R0*(iC1+i1) - u1-R1*iC1-u2-R2*iC2 –u3-R3*iC3– RL4*i4 )/L4) i5= rk((u0-R0*(iC1+i1) - u1-R1*iC1-u2-R2*iC2 –u3-R3*iC3-u4-R4*iC4– RL5*i5 )/L5) i6= rk((u0-R0*(iC1+i1) - u1-R1*iC1-u2-R2*iC2 –u3-R3*iC3-u4-R4*iC4-u5-R5*iC5– RL6*i6 )/L6) END=0 uA= RA*(iC5-i6) t = t+dt {Diese Gleichungen werden so oft wiederholt, bis t größer als die Maximalzeit tmax ist} ( DGL für i1 ) ( DGL für i2 ) ( DGL für i3 ) ( DGL für i4 ) ( DGL für i5 ) ( DGL für i6 ) R. Kessler, D:\579911612.doc, Seite 8 /13 7 Bandpass: 2 Pi-Glieder aus kapazitiv gekoppelten Parallel-Schwingkreisen K1 R0 Ck1 i1 C1 u1 L1 u0 RL1 Ck2 K2 K3 i2 uk1 C2 u2 L2 RL2 i3 uk2 C3 L3 u3 RL3 RA uA Nr. 7 Bandpass Eigenschaften der Schaltungs-Struktur: 8 Energiespeicher. Aber die Kondensatoren Ck1 und Ck2 sind keine „unabhängigen“ Energiespeicher, denn uk1 = u1 - u2 und uk2 = u2-u3. Es liegen also nur 6 unabhängige Energiespeicher vor, nämlich C1, L1, C2, L2, C3 und L3. Also ist für die entsprechenden Zustandsvariabeln u1, i1, u2, i2, u3 und i3 je eine DGL 1. Ordnung aufzustellen. Einfach sind nur die DGL für i1, i2 i3 zu finden: L1*di1/dt + i1*RL1 = u1, L2*di2/dt + RL2*i2 = u2, L3*di3/dt + RL3*i3 = u3. ( DGLn für i1, i2, i4 ) Es müssen also noch die DGLN für u1, u2, u3 gefunden werden. ( Wieder die Schreibweise x’ = dx/dt ) Knoten K1: (u0 - u1)/R0 = C1*u1’ + i1 + Ck1*(u1’ – u2’) = i1 + (C1+Ck1)*u1’ – Ck1*u2’ => (1) (u0-u1)/R0 = i1 + (C1+Ck1)*u1’ – Ck1*u2’ Knoten K2: Ck1*(u1’-u2’) = C2*u2’ + i2 + Ck2*(u2’-u3’) => => (2) Ck1*u1’ = (Ck1+C2+Ck2)*u2’ – Ck2*u3’ + i2 Knoten K3: Ck2*(u2’-u3’) = C3*u3’ + i3 + u3/RA => => (3) Ck2*u2’ = (Ck2+C3)*u3’ + i3 + u3/RA Aus den 3 Gleichungen (1), (2), (3) erkennt man das Lösungsprinzip, um u1’, u2’, u3’ zu gewinnen: Aus (1) setzt man u1’ und aus (3) setzt man u3’ ein in die Gl. (2). Damit ist aus (2) eine Gl. für u2’ allein geworden, dies u2’ setzt man dann in die Gl. für u1’ und für u3’ ein und hat damit auch u1’ und u3’. Ausführung: Aus (1) folgt Gleichung für u1’: u1’ = 1/(C1+Ck1) * ( (u0-u1)/R0 –i1 +Ck1*u2’ ) Aus (3) folgt Gleichung für u3’: u3’ = 1/(Ck2+C3) * ( Ck2*u2’ – i3- u3/RA) Jetzt diese Ausdrücke u1’ und u3’ einsetzen in (2): Ck1/(C1+Ck1) * ( (u0-u1)/R0 –i1 +Ck1*u2’ ) = (Ck1+C2+Ck2)*u2’ + i2 – Ck2/(Ck2+C3) * ( Ck2*u2’ – i3- u3/RA) u2’ ausgeklammert: u2’*( Ck1+C2+Ck2 –Ck1*Ck1/(C1+Ck1) – Ck2*Ck2/(Ck2+C3) ) = Ck1/(C1+Ck1)*( (u0-u1)/R0-i1) - i2 - Ck2/(Ck2+C3) * (i3+u3/RA) Mit der Ablürzung K2= ( Ck1+C2+Ck2 –Ck1*Ck1/(C1+Ck1) –Ck2*Ck2/(Ck2+C3) ) hat man also die DGL für u2: u2’ = 1/K2*( Ck1/(C1+Ck1)*( (u0-u1)/R0-i1) - i2 - Ck2/(Ck2+C3) * (i3+u3/RA) ) ( DGL für u2 ) und diesen Ausdruck u2’ eingesetzt in die beiden oben schon berechneten Formeln für u1’ und u3’: u1’ = 1/(C1+Ck1) * ( (u0-u1)/R0 –i1 +Ck1*u2’ ) ( DGL für u1 ) u3’ = 1/(Ck2+C3) * ( Ck2*u2’ – i3- u3/RA) ( DGL für u3 ) Tephys-Algorithmus mit Runge-Kutta: Datei 7_1.txt Problem: Division durch Null DGL=0 u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) K2= ( Ck1+C2+Ck2 –Ck1*Ck1/(C1+Ck1) – Ck2*Ck2/(Ck2+C3) ) u2’ = 1/K2*(Ck1/(C1+Ck1)*((u0-u1)/R0-i1)- i2-Ck2/(Ck2+C3)*(i3+u3/RA)) u1= rk (1/(C1+Ck1) * ( (u0-u1)/R0 –i1 +Ck1*u2’ ) ) u2 = rk ( u2’) u3 = rk ( 1/(Ck2+C3) * ( Ck2*u2’ – i3- u3/RA)) i1 = rk ( (u1- RL1*i1 )/L1 ) i2 = rk ( (u2- RL2*i2 )/L2 ) i3 = rk ( ( u3-RL3*i3 )/L3 ) END=0 uA=u3 t=t+dt R. Kessler, D:\579911612.doc, Seite 9 /13 8 Bandsperre Pi ( Reihenschwingkreise als Querglieder, Parallel-Schwingkreis als Längsglied) ik Lk R0 Ck i1 i2 iCk L1 u0 C1 M1 L2 uk u1 C2 M2 RA uA u2 Nr 8 Bandsperre Pi Einfach sind die DGLn für u1, u2, ik aufzustellen: C1 * du1/dt = i1 C2 * du2/dt = i2 Lk * dik/dt = uk ( DGL für u1 ) ( DGL für u2 ) ( DGL für ik ) Hilfsgröße einführen: iCk = Strom durch Kondensator Ck (s. Figur) Mit i1+ik+iCK = Strom durch R0 und mit ik+iCk-i2 = Strom durch RA wird die Masche über alles: u0 = R0 * (i1 + ik + iCk) + uk + RA* ( ik + iCk – i2) = (R0 + RA)* iCk + R0*(i1+ik) +RA*(ik –i2) => iCk = 1/(R0+RA) * (u0 –R0*(i1+ik) - RA*(ik – i2) ) (Hilfsgröße iCk) Damit hat man die DGL für uk erhalten: Ck*duk/dt = iCk. ( DGL für uk ) Masche M1: u0 = R0*(i1+ik+iCk) + L1*di1/dt + u1 Masche M1…M2: u0 = R0*(i1+ik+iCk) + uk + L2*di2/dt + u2 Tephys-Algorithmus mit Runge-Kutta: DGL = 0 d=drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+ aR*sign(d-sw)+aS*sin(2*pi*fS*t) iCk = 1/(R0+RA) * (u0 –R0*(i1+ik)-RA*(ik – i2) ) u1 = rk ( i1/C1 ) u2 = rk ( i2/C2 ) ik = rk ( uk/Lk ) uk = rk ( iCk/Ck ) i1 = rk ( ( u0 – R0*(i1+ik+iCk – u1 ) )/L1 ) i2 = rk ( ( u0 – R0*(i1+ik+iCk) – uk –u2 )/L2 ) END = 0 uA = RA*( ik + iCk – i2) t = t+dt ( DGL für i1 ) ( DGL für i2 ) R. Kessler, D:\579911612.doc, Seite 10 /13 9 Bandpass T R0 C1 (Reihen-Schwingkreise als Längsglieder, Parallel-Schwingkreis als Querglied) L1 i1 K iCk u1 Ck u0 M1 Rk uk M2 C2 L2 i2 ik Lk u2 RA uA RLk M3 Nr. 9 Bandpass T Einfach sind die DGLn für u1 und für u2 aufzustellen: C1*du1/dt = Strom durch C1 = Strom i1, also C1*du1/dt = i1 C2*du2/dt = Strom durch C2 = Strom i2, also C2*du2/dt = i2 ( DGL für u1 ) ( DGL für u2 ) Hilfsgröße: Strom durch Kondensator Ck ist iCk = i1 - ik - i2 (s. Figur) => Ck*duk/dt = iCk Masche M1: u0 = R0*i1+ u1 + L1*di1/dt + uk + Rk*iCk => L1*di1/dt = u0 –R0*i1 –u1- uk – Rk*iCk Masche M2: uk + Rk*iCk = Lk * dik/dt + RLk * ik Maschen M2...M3: uk + Rk*iCk = u2 + L2*di2/dt + RA*i2 ( Hilfsgröße iCk ) ( DGL für uk ) Tephys-Algorithmus mit Runge-Kutta: DGL = 0 d=drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) iCk = i1 – ik – i2 u1 = rk ( i1/C1 ) u2 = rk ( i2/C2) uk = rk ( iCk/Ck) i1 = rk ( (u0 – R0*i1 – u1 – uk – Rk*iCk ) /L1) ik = rk ( (uk + Rk*iCk – RLk * ik ) /L1) i2 = rk ( (uk + Rk*iCk – u2 – RA * i2 ) /L2) END = 0 uA = RA * i2 t = t + dt ( DGL für i1 ) ( DGL für ik ) ( DGL für i2 ) R. Kessler, D:\579911612.doc, Seite 11 /13 10 Bandpass Pi R0 (Parallel-Schwingkreise als Querglieder, Reihen-Schwingkreis als Längsglied) Ck K1 i1 Lk K2 ik iC1 iC2 i2 uk L1 C1 u1 C2 u0 R1 RL1 M1 M2 R2 M3 u2 L2 RA uA RL2 M4 Nr 10 Bandpass Pi Infolge R1 und R2 ist das Aufstellen der DGLn schwieriger als bei R1= R2= 0. Durch Einführen der Kondensatorströme iC1 und iC2 gelingt es, die DGLn aufzustellen. Knoten K1: Strom durch R0 = i1 + iC1 + ik => Maschen M1...M2: u0 = R0 * (i1 + iC1 + ik) + u1 + R1 * iC1 = R0*(i1+ik) + (R0 + R1)*iC1 + u1 => iC1 = C1*du1/dt = 1/(R0+R1) * (u0 – u1 – R0 * (i1+ ik) ) ( DGL für u1 u. Hilfsgröße iC1) Masche M1 : u0 = R0*(i1+iC1+ik) + L1*di1/dt + RL1*i1 => L1*di1/dt = u0 – R0*(i1+ iC1+ik) - RL1*i1 ( DGL für i1 ) Knoten K2: ik = C2* u2’ + i2 + ( u2 + R2*C2*u2’ ) /RA = (1 + R2/RA)*C2 * u2’ + i2 + u2/RA => iC2 = C2 * du2/dt = 1/(1+R2/RA) * ( ik – i2 - u2/RA ) ( DGL für u2 u. Hilfsgröße iC2 ) Masche M3: u1+R1*iC1 = uk + Lk*ik’ + u2 + R2*iC2 => Lk* dik/dt = u1 + R1*iC1 – uk – u2 – R2* iC2 Ck * duk/dt = ik Masche M4: u2 + R2*iC2 = L2*di2/dt + RL2*i2 => L2*di2/dt = u2 + R2*iC2 – RL2*i2 Ausgangsspannung uA = RA* (ik – iC2 – i2) Algorithmus mit Runge-Kutta: DGL = 0 d=drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) iC1 = 1/(R0+R1) * (u0 – u1 – R0 * (i1+ ik)) iC2 = 1/(1+R2/RA) * ( ik – i2 - u2/RA ) u1 = rk ( iC1/C1 ) u2 = rk ( iC2/C2 ) i1 = rk ( ( u0 – R0*(i1+ iC1+ik) - RL1*i1 )/L1 ) ik = rk ( (u1 + R1*iC1 – uk– u2 – R2* iC2 )/Lk ) uk = rk ( ik/Ck ) i2 = rk ( ( u2 + R2*iC2 – RL2*i2 )/L2 ) END= 0 uA = RA* (ik – iC2 – i2) t = t + dt ( DGL für ik ) ( DGL für uk ) ( DGL für i2 ) R. Kessler, D:\579911612.doc, Seite 12 /13 11 Bandsperre T i1 L1 i2 L2 K R0 C1 C2 ik iC1 u1 u0 M1 Lk Ck u2 RA uA uk Nr 11 Bandsperre T Einfach sind die DGLn für i1, i2, uk aufzustellen: L1*di1/dt = u1 L2*di2/dt = u2 Ck*duk/dt = ik ( DGL für i1 ) ( DGL für i2 ) ( DGL für uk ) Einführen der Hilfsgröße iC1 = Strom durch Kondensator C1 ( s. Figur). Mit i1 + iC1 = Strom durch R0 und mit i1+ iC1 - ik = Strom durch RA folgt für die Masche über alles: u0 = R0*(i1+ iC1) + u1 + u2 + RA*(i1 + iC1 - ik) => u0 = (R0+RA)*iC1 + R0*i1 + u1 + u2 + RA *(i1-ik) => iC1 = 1/(R0+RA) * (u0 - R0*i1 + u1 + u2 - RA*(i1-ik ) ( Hilfsgröße iC1 ) => C1 *du1/dt = iC1 ( DGL für u1 ) Masche M1: Knoten K: u0 = R0*(i1+iC1) + Lk*dik/dt + uk i1+iC1 = ik + i2 + C2*du2/dt Tephys-Algorithmus mit Runge-Kutta: DGL = 0 d=drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) iC1 = 1/(R0+RA) * (u0 - R0*i1 + u1 + u2 - RA*ik ) i1 = rk ( u1/L1 ) i2 = rk ( u2/L2 ) uk = rk ( ik/Ck ) u1 = rk ( iC1/C1 ) ik = rk ( ( u0 – R0*(i1+iC1) – uk ) )/Lk ) u2 = rk ( ( i1 + iC1 –ik – i2 )/C2 ) END = 0 uA = RA+( ik + iC1 – ik) t = t+dt ( DGL für ik ) ( DGL für u2 ) R. Kessler, D:\579911612.doc, Seite 13 /13 12 Bandsperre T (mit Erschwernis infolge Reihenwiderständen R1, R2) RL1 i1 L1 RL2 R0 i2 L2 K R1 C1 R2 C2 ik iC1 u1 iC2 Lk u2 RA u0 RLk M1 Ck uk uA M2 Nr 12 Bandsperre T (mit zusätzlichen Widerständen R1, R2 und RLk) Infolge der zusätzlichen Widerstände R1, R2 zbd RLk ist das Aufstellen der DGLn etwas schwierger als bei Schaltung Nr 11. Einfach ist nur, die DGL für uk aufzustellen: Ck * duk/dt = ik ( DGL für u1 ) Für die anderen DGLn werden die Hilfsgrößen iC1 und iC2 eingeführt (s. Figur) Knoten K: i1 + iC1 = ik + i2 + iC2 => iC2 = i1 + iC1 –ik – i2 Masche über alles: u0 = R0 *(i1 + iC1) + iC1 * R1 + u1 + iC2 * R2 + u2 + RA* (i1 + iC1- ik ) oder nach Einsetzen von iC2 u0 = R0*(i1+iC1)+iC1*R1+u1+R2*(i1+iC1-ik-i2) +u2 + RA* ( i1 + iC1 – ik ) => u0 = (R0+R1+R2+RA)*iC1 + R0*i1 + u1 + R2*(i1-ik-i2) + u2 + RA*(i1-ik) => iC1 = 1/(R0+R1+R2+RA) * ( u0 – u1 –u2 – (R0+R2+RA)*i1 +R2*i2 + (R2+RA)*ik ) ( Hilfsgröße iC1 ) Mit iC1 ist das Aufstellen für die restlichen DGLn kein Problem mehr: u1: C1*du1/dt = iC1 u2: C2*du2/dt = i1+iC1-ik-i2 (= iC2) i1: RL1*i1 + L1*di1/dt = R1*iC1 + u1 i2: RL2 * i2 + L2 * di2/dt = R2*(i1+iC1-ik-i2) Masche M1: u0=R0*(i1+iC1) +R1*iC1 + u1 + Lk*dik/dt + RLk*ik + uk Tephys-Algorithmus mit Runge-Kutta: DGL = 0 d=drei(fD*t) u0 =aP*ja(t-t1)*ja(t2-t)+aD*d+aR*sign(d-sw)+aS*sin(2*pi*fS*t) iC1 = 1/(R0+R1+R2+RA) * ( u0 – u1 –u2 – (R0+R2+RA)*i1 +R2*i2 + (R2+RA)*ik ) uk = rk (ik/Ck) u1 = rk ( iC1/C1) u2 = rk ( (i1+iC1-ik-i2 )/C2) i1 = rk ( (R1*iC1+u1- RL1*i1)/L1) i2 = rk ( ( R2*(i1+iC1-ik-i2) – RL2*i2 )/L2) ik = rk ( (u0-R0*(i1+iC1)-R1*iC1-u1-RLk*ik-uk )/Lk) END = 0 t = t +dt ( DGL für u1 ) ( DGL für u2 ) ( DGL für i1 ) ( DGL für i2 ) ( DGL für ik )