Abbildungen
Werbung

Kapitel 4
Abbildungen
Gruppen sind die ganze Mathematik“
”
Henry Poincaré (1854 – 1912)
Beauty is the first test: there is no permanent
place in the world for ugly mathematics
Godfrey Harold Hardy (1877 – 1947)
Hier stellen wir zum einen das Handwerkszeug beim Umgang mit Abbildungen dar, zum
anderen skizzieren wir zwei konkrete Abbildungsklassen, die für Anwendungen interessant sind.
Dabei begegnen wir auch dem Gruppenbegriff nun in allgemeiner Umgebung. Am Ende dieses
Kapitels haben wir dann die wesentlichen Objekte kennengelernt, mit denen weitere Begriffe
definiert und Theorien entwickelt werden.
4.1
Definitionen
Mit Abbildungen drücken wir den mathematischen Sachverhalt aus, dass es zwischen zwei Objekten eine klar definierte Abbhängigkeit gibt. Wiederum behandeln wir den Begriff auf der Ebene
einer naiven Auffassung, auf der Ebene einer fundierten Mengenlehre lässt sich der Begriff der
Abbildung ebenso wie der Umgang mit Mengen auf eine sicherere Basis stellen.1
Definition 4.1.1 Seien A, B, C, D Mengen.
(a) Eine Abbildung f von A nach B ist eine Vorschrift, durch die jedem a ∈ A genau ein
Bild b := f (a) ∈ B zugeordnet wird; A heißt Definitionsbereich, B heißt Wertebereich
von f, f (a) heißt Bild von a unter f . Wir schreiben f : A −→ B oder ausführlicher
f : A ∋ a 7−→ f (a) ∈ B .
(b) Zwei Abbildungen f : A −→ B, g : C −→ D heißen gleich, wenn gilt:
A = C, B = D, f (x) = g(x) für alle x ∈ A .
(c) Ist f : A −→ B eine Abbildung, so heißt die Menge
graph(f ) := {(a, b) ∈ A × B|a ∈ A, b = f (a)}
der Graph von f .
1
Der Abbildungsbegriff, wie wir ihn hier eingeführen werden, konnte erst nach G. Cantor in Mode“ kommen,
”
da nun Mengen handhabare Objekte waren.
51
Wir werden später auch von Funktionen sprechen. In unserem Verständnis ist eine Funktion
ein Spezialfall einer Abbildung: wir sprechen dann von einer Funktion, wenn wir eine Abbildung
zwischen Zahlbereichen haben, d.h. wenn Definitions– und Wertebereich der Abbildung Mengen
von Zahlen sind.
Die Vorstufe“ einer Abbildung ist eine Relation. Eine Abbildung f : A −→ B ist nämlich
”
eine Relation, für die gilt:
∀ a ∈ A ∃1 b = ba ∈ B ((a, b) ∈ R) ;
die Vorschrift f kommt dann durch a 7−→ ba zustande und R ist der Graph von f .
Beispiel 4.1.2 Sei A eine Menge. Dann nennt man die Abbildung
idA : A ∋ x 7−→ x ∈ A
die Identität auf A. (Manchmal lassen wir den Index A weg und schreiben einfach id, wenn
klar ist, um welches A es sich handelt.)
Beispiel 4.1.3 Seien A, B Mengen. Dann heißt die Abbildung
π1 : A × B ∋ (a, b) 7−→ a ∈ A
die Projektion auf den ersten Faktor.2 Es sollte klar sein, dass entsprechend auch die
Projektionen auf beliebige Faktoren in einem kartesischen Produkt erklärt sind.
Beispiel 4.1.4 Sei A eine Menge.
Jede Abbildung
N ∋ n 7−→ xn ∈ A
nennt man eine Folge mit Folgengliedern aus A . Meist schreiben wir dafür kurz (xn )n∈N .
Jede Abbildung
Nm × Nn ∋ (i, j) 7−→ aij ∈ A
nennen wir eine Matrix mit m Zeilen und n Spalten mit Einträgen aus A . Meist schreiben wir
dafür kurz (aij )1≤i≤n,1≤j≤m .
Wenn wir A := {0, 1, . . . , 255} wählen, können wir eine solche Matrix als Pixelbild mit m · n
Pixeln und 28 = 256 Grauwertstufen interpretieren.
Definition 4.1.5 Sei f : X −→ Y eine Abbildung und seien A ⊂ X, B ⊂ Y .
(a) Die Menge f (X) := {f (x)|x ∈ X} heißt Bild von f .
(b)
Die Menge f (A) := {f (x)|x ∈ A} heißt Bild von A unter f .
(c)
Die Menge f (B) := {x ∈ X|f (x) ∈ B} heißt die Urbildmenge von B unter f oder
einfach das Urbild von B.
−1
2
Die Wortwahl wird verständlich, wenn wir uns A × A als Koordinatensystem realisiert denken. Dann wird
von einem Punkt durch Beleuchtung parallel zur zweiten Koordinatenachse auf der ersten Achse der projezierte
Punkt sichtbar.
52
Beispiel 4.1.6 Sei f : N ∋ n 7−→ 2n + 1 ∈ N . Dann ist das Bild von f die Menge aller
ungeraden natürlichen Zahlen mit Ausnahme von 1 .
Regel 4.1.7 Sei f : X −→ Y, A1 , A2 ⊂ X, B1 , B2 ⊂ Y .
A1 ⊂ A2
=⇒
f (A1 ) ⊂ f (A2 )
(4.1)
f (A1 ∪ A2 )
=
f (A1 ) ∪ f (A2 )
(4.2)
f (A1 ∩ A2 )
⊂
f (A1 ) ∩ f (A2 )
(4.3)
B1 ⊂ B 2
−1
−1
f (B1 ) ⊂ f (B2 )
=⇒
−1
−1
f (B1 ∪ B2 )
−1
f (B1 ) ∪ f (B2 )
=
−1
−1
f (B1 ∩ B2 )
(4.4)
(4.5)
−1
f (B1 ) ∩ f (B2 )
=
(4.6)
Beweisen wir etwa (4.5).
Da eine Gleichheit von Mengen behauptet wird, sind zwei Inklusionen zu verifizieren.
−1
−1
−1
Zu f (B1 ∪ B2 ) ⊂ f (B1 ) ∪ f (B2 ) .
−1
−1
Sei x ∈ f (B1 ∪ B2 ) . Also gilt f (x) ∈ B1 ∪ B2 . Ist f (x) ∈ B1 , dann ist x ∈ f (B1 ) ⊂
−1
−1
−1
−1
−1
f (B1 ) ∪ f (B2 ) . Ist f (x) ∈ B2 , dann ist x ∈ f (B2 ) ⊂ f (B1 ) ∪ f (B2 ) .
−1
−1
−1
Zu f (B1 ) ∪ f (B2 ) ⊂ f (B1 ∪ B2 ) .
−1
−1
−1
−1
Sei x ∈ f (B1 ) ∪ f (B2 ) . Ist x ∈ f (B1 ), dann ist f (x) ∈ B1 ⊂ B1 ∪ B2 , d.h. x ∈ f (B1 ∪ B2 ) .
−1
−1
Ist x ∈ f (B2 ), dann ist f (x) ∈ B2 ⊂ B1 ∪ B2 , d.h. x ∈ f (B1 ∪ B2 ) .
Man beachte, dass die Aussage
f (A1 ∩ A2 ) = f (A1 ) ∩ f (A2 )
i.a. falsch ist.
Definition 4.1.8 Seien f : X −→ Y , g : Y −→ Z Abbildungen. Die Hintereinanderausführung oder Komposition g ◦ f der Abbildungen f, g ist erklärt durch
g ◦ f : X ∋ x 7−→ g(f (x)) ∈ Z .
Regel 4.1.9 Seien f : X −→ Y, g : Y −→ Z, h : Z −→ W Abbildungen.
idY ◦ f
= f ◦ idX
h ◦ (g ◦ f ) = (h ◦ g) ◦ f
(4.7)
(4.8)
Die Identität in (4.8) nennt man das Assoziativgesetz. Man beachte, dass für die Hintereinanderausführung von Abbildungen ein Kommutativgesetz ( f ◦ g = g ◦ f ) im allgemeinen nicht
gilt.
Definition 4.1.10 Sei f : X −→ Y eine Abbildung und sei A eine Teilmenge von X . Dann
heißt die Abbildung
A ∋ x 7−→ f (x) ∈ Y
die Einschränkung von f auf A und wir schreiben dafür f |A .
53
4.2
Abzählen, die Zweite
Wir ergänzen die Überlegungen aus Abschnitt 2.3, indem wir nun Abbildungen damit in Verbindung bringen.
Wenn wir zählen/abzählen, ordnen wir den Elementen einer Menge von Objekten sukzessive
eine natürliche Zahl, beginnend bei 1, zu. Wesentlich beim Zählen ist, dass wir zwei verschiedenen
Objekten nicht dieselbe Zahl zuordnen. Dies führt uns dazu, das Zählen mit einer Abbildung,
der Zuordnung, mit Werten in N zu beschreiben, die zusätzlich die eben formulierte Forderung
respektiert.
Definition 4.2.1 Sei f : X −→ Y eine Abbildung.
(i) f injektiv genau dann, wenn für alle x, x′ ∈ X x 6= x′ =⇒ f (x) 6= f (x′ ) gilt.
(ii) f surjektiv genau dann, wenn für alle y ∈ Y ein x ∈ X existiert mit y = f (x) .
(iii) f bijektiv : ⇐⇒ f injektiv und surjektiv
Wir charakterisieren die Eigenschaften von Abbildungen aus Definition 4.2.1 in einer Weise,
die uns dann weiterbringt.
Satz 4.2.2 Sei f : X −→ Y eine Abbildung und sei B := f (X). Dann gilt:
(a) f ist injektiv genau dann, wenn g : B −→ X existiert mit g ◦ f = idX .
(b) f ist surjektiv genau dann, wenn g : Y −→ X existiert mit f ◦ g = idY .
(c) f ist bijektiv genau dann, wenn g : Y −→ X existiert mit g ◦ f = idX , f ◦ g = idY .
Beweis:
Zunächst eine Vorüberlegung.
−1
−1
Sei y ∈ B . Dann ist f ({y}) 6= ∅ ; wähle xy ∈ f ({y}) . Damit definieren wir
ĝ : B ∋ y 7−→ ĝ(y) := xy ∈ X .
−1
Zu (a). Sei f injektiv. Wir setzen g := ĝ . Da f injektiv ist, gilt f ({y}) = xy für jedes y ∈ B .
Sei x ∈ X, y := f (x) . Dann ist also x = xy und wir haben
(g ◦ f )(x) = g(f (x)) = ĝ(f (xy )) = xy = x = idX (x) für alle x ∈ X .
Sei nun g : B −→ X mit g ◦ f = idX . Seien x, x′ ∈ X mit f (x) = f (x′ ). Dann ist
x = idX (x) = g(f (x)) = g(f (x′ )) = idX (x′ ) = x′ ,
was wir zeigen wollten.
Zu (b). Sei f surjektiv. Wir setzen g := ĝ und beachten B = Y . Dann ist
(f ◦ g)(y) = f (ĝ(y)) = f (xy ) = y = idY (y) .
Die Umkehrung ist trivial.
Zu (c). Gibt es g mit den notierten Eigenschaften, dann ist nach (a) und (b) die Bijektivität
54
von f klar. Sei nun f bijektiv. Dann ist B = Y und es gibt nach (a) und (b) Abbildungen
ga : Y −→ X und gb : Y −→ X mit ga ◦ f = idX , f ◦ gb = idY . Wir zeigen ga = gb und sind
dann fertig. Unter Verwendung der eben angeführten Identitäten folgt:
ga = ga ◦ idY = ga ◦ (f ◦ gb ) = (ga ◦ f ) ◦ gb = idX ◦ gb = gb .
Im Beweis der Vorüberlegung des Beweises zu Satz 4.2.2 haben wir das so genannte starke
Auswahlaxiom benutzt.3
Die Abbildung g in (c) von Satz 4.2.2 ist eindeutig bestimmt. Dies sieht man so: Sind g, g̃
zwei Abbildungen mit
g ◦ f = idX , f ◦ g = idY , g̃ ◦ f = idX , f ◦ g̃ = idY ,
dann haben wir:
g(y) = g ◦ idY (y) = g ◦ f ◦ g̃(y) = idX ◦ g̃(y) = g̃(y) , y ∈ Y ,
d.h. g = g̃ .
Definition 4.2.3 Sei f : X −→ Y bijektiv. Die nach Satz 4.2.2 (c) eindeutig bestimmte
Abbildung4 g mit g ◦ f = f ◦ g = id heißt die (zu f ) inverse Abbildung. Wir schreiben dafür
f −1 .
−1
Die Notation f und f −1 passt folgendermaßen zusammen: Ist f : X −→ Y eine bijektive
−1
Abbildung, B ⊂ Y, dann ist f −1 (B) = f (B) .
Beispiel 4.2.4 Betrachte f : Z2 ∋ (x, y) 7−→ (y, x) ∈ Z2 . Hier gilt f −1 = f .
Regel 4.2.5 Seien f : X −→ Y , g : Y
bijektiv und es gilt (g ◦ f )−1 = f −1 ◦ g−1 .
−→ Z bijektiv. Dann ist auch g ◦ f : X −→ Z
Dies verifiziert man ohne Mühe.
Als Vorbereitung für das Abzählen von Mengen beweisen wir
Satz 4.2.6 Sei A eine Menge, seien m, n ∈ N, und seien φ : A −→ Nn , ψ : A −→ Nm
bijektiv. Dann gilt n = m .
Beweis:
O.E. 1 ≤ m ≤ n . Wir beweisen mit vollständiger Induktion die Aussage
Zu n ∈ N gibt es für 1 ≤ m < n keine injektive Abbildung g : Nn −→ Nm .
n = 2 : Klar, da Nn = {1, 2}, Nm = {1} für m < n, und Bild(g) = {1} .
n + 1 : Annahme: Es gibt eine injektive Abbildung g : Nn+1 −→ Nm , 1 ≤ m < n + 1 .
3
Es besagt, dass man zu einer Familie Xα , α ∈ A, von Mengen eine Auswahlfunktion c : A −→ ∪α∈A Xα mit
c(α) ∈ Xα für alle α ∈ A existiert. Dahinter versteckt sich ein Problem, das in den Grundlagen der Mathematik
auf der Basis einer fundierten Mengenlehre seinen Platz hat; hier halten wir an diesem Axiom wie an einem
Glaubenssatz fest.
4
In der Literatur spricht man bei bijektiven Abbildungen oft auch von umkehrbar eineindeutigen Abbildungen.
In Satz 4.2.2 zusammen mit Definition 4.2.1 liegt die Berechtigung für eine solche Sprechweise.
55
Da g injektiv ist und Nn+1 mindestens die Elemente 1,2 enthält, ist 1 < m .
1. Fall: g(n + 1) = m .
Dann ist g|N : Nn −→ Nm−1 injektiv mit m − 1 < n im Widerspruch zur Induktionsvorausn
setzung.
2. Fall: g(n + 1) = k 6= m .
Offenbar gibt es eine Bijektion V : Nm −→ Nm mit V (i) = i für i 6= k, m und V (k) =
m, V (m) = k . Nun ist g̃ := V ◦ g : Nn+1 −→ Nm injektiv mit g̃(n + 1) = m , wir sind im 1. Fall
und der Beweis ist erbracht.
Nachdem nun die obige Aussage bewiesen ist, ist die Behauptung des Satzes schnell gezeigt.
Annahme: Es gibt bijektive Abbildungen φ : A −→ Nn , ψ : A −→ Nm , n 6= m . O.E. sei etwa
n > m . Da ψ ◦ φ−1 : Nn −→ Nm bijektiv ist nach Lemma ??, haben wir einen Widerspruch
zur obigen Aussage.
Definition 4.2.7 Sei M eine Menge, M 6= ∅ .
(a) M heißt endlich, wenn es ein N ∈ N und eine bijektive Abbildung ϕ : M −→ NN gibt;
wir setzen dann #M := N . (Da nach Satz 4.2.6 die Zahl N eindeutig bestimmt ist, ist die
Schreibweise #M := N wohldefiniert.)
(b) M heißt abzählbar unendlich, wenn es eine bijektive Abbildung ϕ : M −→ N gibt. Wir
schreiben dann #M = ∞ .
(c) M heißt abzählbar, wenn M endlich oder abzählbar unendlich ist.
Die obige Definition sagt also, dass wir die Elemente einer (endlichen) Menge M gezählt haben,
wenn wir eine Bijektion φ : M −→ NN gefunden haben; das Zählergebnis ist #M := N .
Man beachte, dass es Mengen gibt, die nicht abzählbar sind. Ein wichtiges Beispiel ist M :=
R . Das Cantorsche Diagonalisierungsverfahren, das üblicherweise im Rahmen der Analysis
im Zusammenhang mit der Dezimalbruchentwicklung vorgestellt wird, belegt dies; wir kommen
darauf zurück.
4.3
Gruppen und Permutationen
Sei M eine nichtleere Menge. Wir setzen
Abb (M ) := {f : M −→ M } .
In dieser Menge der Selbstabbildungen von M ist eine Multiplikation“ erklärt durch die Kom”
position von Abbildungen:
f • g := f ◦ g , f, g ∈ Abb (M ) .
(G := {f ∈ Abb (M )|f bijektiv } , • := ◦) wird damit zu einer Gruppe. Die Gruppen sind
von überrragender Bedeutung. Ihre Nutzung hinterließ eine Erfolgsspur in der Mathematik. Die
Definition dieser mathematischen Objekte folgt nun.
Definition 4.3.1 Eine Menge G zusammen mit einer Verknüpfung • : G × G ∋ (a, b) 7−→
a • b ∈ G heißt eine Gruppe genau dann, wenn gilt:
a) Für alle a, b, c ∈ G gilt
a • (b • c) = (a • b) • c .
56
b) Es gibt ein Element e ∈ G mit
a • e = e • a = a für alle a ∈ G .
c) Zu jedem a ∈ G gibt es ein Element ā ∈ G mit
a • ā = ā • a = e .
Ist zusätzlich noch
d) Für alle a, b ∈ G gilt
a • b = b • a.
erfüllt, so heißt die Gruppe kommutativ.
Sei G eine Gruppe. Die Bedingung b) besagt, dass es ein bezüglich der Verknüpfung “•“
neutrales Element e in G gibt. Ist e′ ein weiteres neutrales Element in G, so lesen wir aus
e′ = e′ • e = e
ab, dass das neutrale Element in einer Gruppe eindeutig bestimmt ist; dabei haben wir b)
zweimal verwendet.
Das in der Bedingung c) eingeführte Element ā heißt das zu a inverse Element. Es ist
ebenfalls eindeutig bestimmt, denn aus
a • ā = ā • a = e , a • ā′ = ā′ • a = e ,
folgt
ā′ = ā′ • e = ā′ • (a • ā) = (ā′ • a) • ā = e • ā = ā .
Die Bedingung a), die wir eben verwendet haben, nennt man das Assoziativgesetz. Es besagt,
dass Klammern bei der Reihenfolge der Verknüpfungen beliebig gesetzt werden dürfen und
deshalb, soweit sie nicht für die Lesbarkeit benötigt werden, weggelassen werden dürfen.
Wegen der Eindeutigkeit des inversen Elements (siehe oben) können wir nun ein inverses Element in der Bezeichnung auszeichnen.
Bezeichnung: Wir schreiben für das inverse
Element ā von a im abstrakten Rahmen meist
a−1 , in speziellen Fällen weichen wir davon ab.
◦
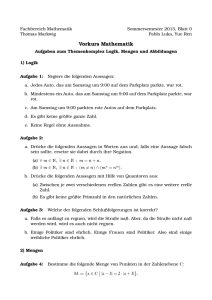
id τ1 τ2 τ3 τ4 τ5
id
id τ1 τ2 τ3 τ4 τ5
τ1
τ1 id τ3 τ2 τ5 τ4
τ2 τ2 τ4 id τ5 τ1 τ3
Wir führen nun eine Reihe von Beispielen
τ3 τ3 τ5 τ1 τ4 id τ2
an und zeigen damit, dass der Gruppenbegriff
τ4 τ4 τ2 τ5 id τ3 τ1
in der Tat geeignet ist, viele Objekte unter einem gemeinsamen Gesichtspunkt zu betrachτ5 τ5 τ3 τ4 τ1 τ2 id
ten. Dabei schreiben wir dann Verknüpfung,
Einselement, Inverses immer mit dem SymAbbildung 4.1: Die Permutationsgruppe S3
bol, das wir in der speziellen Situation bereits
kennen. Auf die Verifikation der Assoziativität
bzw. Kommutativität verzichten wir meist, da hier in der Regel kein Problem vorliegt.
Beispiel 4.3.2 (G := Z, • := +) ist eine kommutative Gruppe mit neutralem Element 0 und
Inversem −z für z ∈ Z .
Wenn die Verknüpfung eine Addition ist wie etwa in Beispiel 4.3.2, nennt man das Inverse
eines Elements meist das Negative. Ist die Verknüpfung • in einer Gruppe einer Addition
verwandt“, so nennt man sie, wenn sie kommutativ ist, auch abelsch.5
”
5
Der Begriff abelsch“ ist vom Namen des norwegischen Mathematikers N.H. Abel abgeleitet. Neben Arbeiten
”
zur Konvergenz von Reihen beschäftigte er sich mit der Lösbarkeit von Gleichungen fünften Grades und bewies
57
Beispiel 4.3.3 (G := Q, • := +) ist eine abelsche Gruppe. Das neutrale Element ist 0, das
Inverse (Negative) eines Elementes r ist −r. Wir kommen im nächsten Kapitel darauf zurück.
Beispiel 4.3.4 (G := Q\{0}, • := ·) ist eine abelsche Gruppe. Das neutrale Element ist 1, das
Inverse eines Elementes r ist r −1 . Wir kommen im nächsten Kapitel darauf zurück.
Beispiel 4.3.5 Wir finden die Gruppenstruktur auch beim Rechnen mit Restklassen.
(G := Zm , • := +) ist eine abelsche Gruppe. Das neutrale Element ist [0], das Inverse (Negative)
eines Elementes [i] ist [−i] .
(G := Zm \{[0]}, • := ·) ist eine abelsche Gruppe, falls m eine Primzahl ist. Das neutrale
Element ist [1], das Inverse eines Elementes [i] ist [j] mit [ij] = [1] .
Kehren wir zurück zu
G := {f ∈ Abb (M )|f bijektiv } , • := ◦ .
(G, •) ist damit eine (im allgemeinen nicht kommutative) Gruppe; wir bezeichnen sie mit S(M ) .
Das Assoziativgesetz ist klar, das neutrale Element ist die Identität idM , das inverse Element
eines Elements f ∈ G ist f −1 . Beachte auch, dass mit f, g ∈ G auch f ◦ g ∈ G , f −1 ∈ G gilt.
Definition 4.3.6 Ist M eine nichtleere Menge, so nennen wir die Gruppe S(M ) die symmetrische Gruppe von M. Ist M = Nm , dann nennen wir S(M ) Permutationsgruppe und
jedes Element in S(M ) eine Permutation. In diesem Spezialfall schreiben wir kurz Sm .
Die Wortwahl Permutationsgruppe wird verständlich, wenn wir beobachten, dass bei der
Menge M = {1, . . . , m} einer Abbildung f in Sm die Umstellung der Elemente in M gemäß
1
2
...
m
f (1) f (2) . . . f (m)
entspricht. Die Wortwahl symmetrische Gruppe rührt daher, dass die Funktionen der Variablen x1 , . . . , xm , die bei allen Permutationen der Variablen invariant bleiben, die symmetrischen Funktionen sind; siehe Abschnitt 9.2.
Beispiel 4.3.7 Wir betrachten S3 . Die sechs Elemente der Gruppe sind dann in obiger Schreibweise
123
123
123
123
123
123
τ0 =
τ1 =
τ2 =
τ3 =
τ4 =
τ5 =
.
123
132
213
231
312
321
Klar, τ0 ist die Identität.
Die Gruppentafel ist in Abbildung 4.1 dargestellt. Da die Gruppe S3 nicht kommutativ ist,
ist die Tafel nicht symmetrisch zur Diagonalen. Wir müssen daher auch festlegen, wie die Tafel
ausgefüllt wurde: zuerst die Randspalte und dann die Kopfzeile. Beispielsweise haben wir τ1 ◦τ2 =
τ4 und τ5 ◦ τ3 = τ2 .
die Unmöglichkeit der Lösung einer allgemeinen Gleichung fünften Grades mit Hilfe von Radikalen (Wurzelausdrücken); siehe dazu Abschnitt 11.7. Seine Ideen hierzu sind eng mit denen des französischen Mathematikers E.
Galois, dessen Theorie in der Algebra eine überragende Rolle spielt, verwandt. Mit ihm teilt er auch das Schicksal,
sehr jung zu sterben, Abel starb an Schwindsucht, Galois in einem Duell.
58
Bemerkung 4.3.8 Einer endlichen Gruppe, d.h. einer Gruppe mit endlich vielen Elementen,
kann man durch Blick auf ihre Gruppentafel sofort ansehen, ob sie kommutativ ist. Sie ist
nämlich kommutativ genau dann, wenn ihre Gruppentafel symmetrisch zur Hauptdiagonalen
ist. S3 ist also nicht kommutativ. Daraus folgt, dass Sm , m ≥ 3, nicht kommutativ ist (Beweis!).
Sei nun stets Sm für m ≥ 2 betrachtet, S1 ist ja trivial!
Definition 4.3.9 Sei σ ∈ Sm . Wir setzen
a(σ) := #{(i, j) ∈ Nm × Nm |i < j, σ(i) > σ(j)} , ǫ(σ) := (−1)a(σ)
und nennen σ gerade, falls ǫ(σ) = 1 gilt, anderenfalls ungerade. ǫ(σ) heißt Signum/Signatur
von σ und a(σ) die Fehlstandszahl von σ .
Beispiel 4.3.10 Sei
σ=
1 2 3 4 5
3 5 1 4 2
.
Dann gilt a(σ) = 6, denn wir zählen A := {(i, j) ∈ Nm × Nm |i < j, σ(i) > σ(j)} folgendermaßen
ab.
i = 1 : (1, 3), (1, 5) ∈ A ; i = 2 : (2, 3), (2, 4), (2, 5) ∈ A ; i = 3 : Fehlanzeige; i = 4 : (4, 5) ∈ A .
Also ist σ eine gerade Permutation.
Lemma 4.3.11 Für jedes σ ∈ Sm gilt
ǫ(σ) =
Y
1≤i<j≤m
σ(j) − σ(i)
j−i
(4.9)
Beweis:
Dies folgt aus der Tatsache, dass Zähler und Nenner des Gesamtprodukts (4.9) dank der Bijektivität von σ bis aufs Vorzeichen dieselben Faktoren enthalten.
Ein τ ∈ Sm heißt Nachbarvertauschung, wenn
∃i ∈ {1, . . . , m} mit τ (i) = i + 1 , τ (i + 1) = i ; τ (j) = j , j 6= i, i + 1,
gilt. Ein τ = τkl ∈ Sm , k 6= l , heißt Transposition, wenn gilt:
τ (k) = l , τ (l) = k ; τ (j) = j , j 6= k, l ,
gilt. Nachbarvertauschungen sind also spezielle Transpositionen. Man überzeugt sich leicht, dass
für eine Transposition τ ∈ Sm gilt: τ −1 = τ .
Lemma 4.3.12 Sei σ ∈ Sm und sei τ ∈ Sm eine Nachbarvertauschung.
Dann gilt ǫ(τ ◦ σ) = −ǫ(σ) .
Beweis:
ǫ(τ ◦ σ) =
Y
1≤i<j≤m
=
Y
1≤i<j≤m
= ǫ(σ)
τ (σ(j)) − τ (σ(i))
j−i
τ (σ(j)) − τ (σ(i))
·
σ(j) − σ(i)
Y
1≤i<j≤m
Y
1≤i<j≤m
σ(j) − σ(i)
j−i
τ (σ(j)) − τ (σ(i))
= −ǫ(σ) .
σ(j) − σ(i)
59
Bei der letzten Gleichheit haben wir verwendet, dass im Produkt
Y
1≤i<j≤m
τ (σ(j)) − τ (σ(i))
σ(j) − σ(i)
auf Grund der Tatsache, dass τ eine Transposition ist, alle Faktoren den Wert 1 haben mit einer
Ausnahme; dieser Faktor hat den Wert −1.
Folgerung 4.3.13 Sei σ ∈ Sm und sei τ ∈ Sm eine Transposition. Dann gilt ǫ(τ ◦ σ) = −ǫ(σ) .
Beweis:
Sei etwa τ = τkl . Setze σ ′ := τ ◦ σ . Betrachte nun
Σ′ : σ ′ (1), . . . , σ ′ (m)
Σ : σ(1), . . . , σ(m)
Hier unterscheiden sich die beiden Anordnungen nur dadurch, dass k und l die Plätze getauscht
haben. Sei s die Anzahl der Zahlen, die in Σ zwischen k und l vorkommen. Dann erhält man
Σ′ aus Σ durch 2s + 1 sukzessive Vertauschung benachbarter Elemente. Nach Lemma 4.3.12 gilt
dann ǫ(σ ′ ) = (−1)2s+1 ǫ(σ) = −ǫ(σ) .
Satz 4.3.14 Sei m ≥ 0 . Jedes σ ∈ Sm lässt sich als Hintereinanderausführung von höchstens
m Transpositionen schreiben, d.h. zu jedem σ ∈ Sm gibt es s ≤ m Transpositionen τ1 , . . . , τs mit
σ = τ1 ◦ · · · ◦ τs .
Beweis:
Sei σ ∈ Sm . Für σ = id gilt σ = τ21 ◦ τ12 . Sei σ 6= id . Dann gibt es ein kleinstes i1 mit
σ(i1 ) = j1 6= i1 . Setze σ1 := σ ◦ τi1 j1 . Es ist σ1 (i) = i für 1 ≤ i ≤ i1 . Falls σ1 = id gilt, sind
wir fertig. Anderenfalls gibt es ein i2 > i1 mit σ1 (i2 ) = j2 6= i2 . Setze σ2 := σ1 ◦ τi2 j2 . Dann
gilt σ2 (i) = i für 1 ≤ i ≤ i2 . So fortfahrend erreichen wir ein σs , s ≤ m, mit σs = id . Dann ist
σ = τis js ◦ · · · ◦ τi1 j1 .
Folgerung 4.3.15 Ist σ ∈ Sm Hintereinanderausführung von r Transpositionen, dann gilt
ǫ(σ) = (−1)r .
Beweis:
Folgt aus Satz 4.3.14 durch mehrmaliges Anwenden von ǫ(τ ◦σ) = −ǫ(σ) (siehe Folgerung 4.3.13)
für jede beteiligte Transposition τ.
Wir haben gesehen, dass unabhängig von der Art der Darstellung einer Permutation als
Produkt von Transpositionen die Anzahl der dabei benötigten Transpositionen bei geraden Permutationen stets gerade und bei ungeraden Permutationen stets ungerade ist.
Definition 4.3.16 Die Menge Am := {σ ∈ Sm |ǫ(σ) = 1} heißt alternierende Gruppe.
In Am haben wir eine Untergruppe von Sm kennengelernt, d.h. eine Teilmenge von Sm , die
selbst eine Gruppe bezüglich der von Sm geerbten“ Verknüpfung ist.
”
Folgerung 4.3.17 Sei m ≥ 2 . Dann gilt:
(a) ǫ(σ ◦ σ ′ ) = ǫ(σ)ǫ(σ ′ ) , σ, σ ′ ∈ Sm .
(b) ǫ(σ −1 ) = ǫ(σ) , σ ∈ Sm .
(c) #Sm = m! , #Am = m!/2 .
60
Beweis:
(a) folgt aus Satz 4.3.14 und Folgerung 4.3.15, ebenso (b), da für jede Transposition τ gilt:
τ −1 = τ . Die Aussage #Sm = m! in (c) ist klar, da es sich bei Sm um die Menge der Permutationen handelt, die Ausage #Am = m!/2 folgt aus der Tatsache, dass für jede Nachbarvertauschung τ durch Sm ∋ σ 7−→ τ ◦ σ ∈ Sm eine bijektive Abbildung definiert ist, bei der die
geraden Permutationen auf ungerade und die ungeraden Permutationen auf gerade Permutationen abgebildet werden.
4.4
Farbräume
Die Wahrnehmung von Lichtreizen geschieht in den Sinneszellen in der Netzhaut des Auges.
Dabei sind die Stäbchen (ca. 100 Millionen)– sie sind vorwiegend für die Wahrnehmung von
hell/dunkel verantwortlich – und die Zäpfchen (ca. 6 Millionen) – sie nehmen die Farben wahr
– beteiligt. Es gibt Zäpfchen, die besonders auf rot, grün und blau reagieren mit unterschiedlichen Empfindlichkeiten. Das auf die Netzhaut auftreffende Licht erzeugt je nach Farbe ein
Aktivierungspotential der roten, grünen und blauen Sinneszellen. Aufgrund dieses elektrischen
Potentials feuern Nervenzellen elektrische Impulse an das Gehirn, wo dann die eigentliche Sinneswahrnehmung stattfindet.
Die Tatsache, dass das Auge drei Sinnesrezeptoren für die Farben rot, grün, blau besitzt,
cyan magenta gelb
hat die Konsequenz, dass sich alle Farben
rot
0.0
1.0
1.0
hinreichen gut aus diesen Grundfarben aufgrün
1.0
0.0
1.0
bauen lassen. Mathematisch betrachtet, spanblau
1.0
1.0
1.0
nen die Grundfarben einen dreidimensionagelb
0.0
0.0
1.0
len Raum auf; jede Koordinate entspricht eicyan
1.0
0.0
0.0
nem Farbwert einer Grundfarbe. Eine allmagenta
0.0
1.0
0.0
gemeine Farbe kommt als Linearkombinatiweiss
0.0
0.0
0.0
on der Grundfarben zustande. Die Tabelle
schwarz
1.0
1.0
1.0
4.2 zeigt spezielle Mischverhältnisse“ und ih”
re zugeordneten Farben. Das Farbmodell mit
den Grundfarben rot, grün, blau bezeichnet
Abbildung 4.2: Tabelle CMY/RGB
man als RGB-Farbmodell. Computermonitore verwenden dieses Modell. Aus der Tabelle entnehmen wir, dass die Farben cyan, magenta, gelb
als Komplementärfarben von rot, grün, blau angesehen werden können. Die Komplementärfarben
entstehen durch einfache Subtraktion:
R
1
C
M = 1 − G .
B
1
Y
Nimmt man als Grundfarben cyan, magenta, gelb, entsteht das CMY–Farbmodell (Mathematisch gesehen, machen wir einen Basiswechsel, wenn wir nun versuchen, alle Farben mit Hilfe
dieser Komplementärfarben darzustellen.). Hier ist die obige Tabelle auf der Basis“ des CMY–
”
Farbmodell In der Druckindustrie wird hauptsächlich das CMY-Modell verwendet. Meistens
kommt noch die Farbe schwarz (black) dazu, da ein Mischen der Farben cyan, magenta, grün
kein richtiges Schwarz ergibt: Vierfarbendruck CMYB.
Im Sinne der linearen Algebra haben wir die Farben rot, grün, blau oder cyan, magenta, grün
als Basisfarben gewählt. Es sollte daher klar sein, dass man auch zu anderen Basen übergehen
könnte. Aber haben solche andere Basen noch eine funktionale Bedeutung? Ja, es gibt noch
61
solche Beispiele! Wir führen das YIQ-Modell an, welches im amerikanischen Farbfernsehen
Verwendung findet. Der Basiswechsel“ ist ablesbar aus der Matrixoperation
”
Y
0.299 0.587
0.114
R
I = 0.596 −0.275 −0.321 G .
Q
0.212 −0.523 0.311
B
Dabei steht Y nun für die Luminanz (Helligkeit), I und Q beschreiben die Chrominanz
(Farbigkeit).
Das YUV-Modell findet im deutschen Fernsehen Verwendung:
Y
0.299
0.587
0.114
R
U = −0.147 −0.289 0.437 G .
V
0.615 −0.515 −0.100
B
Dabei steht Y wieder für die Luminanz (Helligkeit), U und V beschreiben wieder eine Chrominanz (Farbigkeit).
Das menschliche Auge kann nur ca. 200 Farbtöne unterscheiden. Die Farbmodelle, die die
Luminanz verwenden, machen sich die Tatsache zunutze, dass das Auge in der Kombination
mit dem sehr viel stärkeren Helligkeitsempfinden in der Lage ist, ca. 7 Millionen Farbtöne zu
differenzieren.
4.5
Chinesischer Restsatz
Den folgenden Chinesischen Restsatz haben wir benutzt beim Beweis des Resultats über die
Periodenlänge einer Pseudozufallsfolge, erzeugt von einem linearen Kongruenz-Generator. Er ist
aber auch in vielen anderen Situationen hilfreich.
Sei m ∈ N, m ≥
Offenbar haben Zm
nahe, dass man Zm
durch
g
2, ein Modul und sei m = pk11 · · · · · pkr r die Primfaktorzerlegung von m .
und Zpk1 × · · · × Zpkr r gleich viele Elemente. Es liegt also die Vermutung
1
und Zpk1 × · · · × Zpkr r durch eine Abbildung verbinden kann. Dies gelingt
1
: Zm ∋ [u]m 7−→ ([u]pk1 , . . . , [u]pkr r ) ∈ Zpk1 × · · · × Zpkr r ,
1
(4.10)
1
wobei [u]l die Restklasse bezüglich eines Moduls l bezeichnet.
Satz 4.5.1 (Chinesischer Restsatz) Ist m = pk11 · · · · · pkr r die Primfaktorzerlegung von m, so
ist Zm isomorph zu Zpk1 × · · · × Zpkr r vermöge der Abbildung g aus (4.10), d.h. g ist bijektiv und
1
es gilt:
g([u] + [v]) = g([u]) + g([v]) , g([u] · [v]) = g([u]) · g([v]) , u, v ∈ Z .
(4.11)
Dabei wird sowohl Addition als auch Multiplikation in Zpk1 ×· · ·×Zpkr r komponentenweise erklärt.
1
Beweis:
Da Zm und Zpk1 × · · · × Zpkr r gleich viele Elemente besitzen, genügt es zu zeigen, dass g injektiv
1
ist. Dazu reicht nun zu zeigen, dass aus g([u]) = ([0], . . . , [0]) folgt: [u] = [0] .
Aus g([u]) = ([0], . . . , [0]) folgt pki i |u, i = 1, . . . , r . Dann folgt aber m = pk11 · · · pkr r |u . Also
[u] = [0] .
Die in (4.11) aufgeführten Eigenschaft sind einfach zu verifizieren.
62
Bemerkung 4.5.2 Die Abbildung g in (4.10) nennen wir eine Isomorphie, da sie die Strukturen (Addition, Multplikation) in Zm bzw. Zpk1 × · · · × Zpkr r treu“ aufeinander abbildet; siehe
”
1
(4.11).
Satz 4.5.3 (Lösung von Kongruenzen) Seien r1 , . . . , rl ∈ Z und m1 , . . . , ml ∈ N\{1} . Es
gelte:
1 = ggT(mi , mj ) für alle i, j = 1, . . . , l, i 6= j .
(4.12)
Dann besitzt das Kongruenzen-System
x ≡ ri
mod mi , i = 1, . . . , l
eine Lösung x ∈ Z und alle Lösungen y sind gegeben als y = x + km1 · · · ml , k ∈ Z .
Beweis:
Es ist einfach einzusehen, dass, eine Lösung x vorausgesetzt, alle Lösungen so aussehen, wie
behauptet.
Der Beweis zur Existenz von x wird mit Hilfe des Lemmas von Bezout geführt; siehe Satz 3.3.8.
Sei m := m1 · · · ml . Nach Voraussetzung sind mi und Mi := m/mi teilerfremd. Nach dem
Lemma von Bezout gibt es Zahlen si , ti ∈ Z mit
si mi + ti Mi = 1 , i = 1, . . . , l .
Wir setzen nun ei := ti Mi , i = 1, . . . , l , und rechnen ohne Mühe nach, dass
(
1 mod mj , falls i = j
, i, j = 1, . . . , l
ei ≡
0 mod mj , falls i 6= j
gilt. Also ist die Zahl
x :=
l
X
ri ei
(4.13)
i=1
eine Lösung.
Beispiel 4.5.4 Betrachte die Multiplikation der Zahlen 102, 99, also 102 · 99 =????? .
Wir wählen (geschickt) die Moduln m1 = 9, m2 = 10, m3 = 11 und erhalten folgende Reste für
das Produkt:
102 · 99 ≡ (99 + 3) · (99 + 0) ≡ 3 · 0 ≡ 0
mod 9 ;
102 · 99 ≡ (100 + 2) · (100 − 1) ≡ 2 · (−1) ≡ −2 mod 10 ;
102 · 99 ≡ (99 + 3) · (99 + 0) ≡ 3 · 0 ≡ 0 mod 11 .
Wir haben m := m1 m2 m3 = 990 . Da r1 = r3 = 0 ist, haben wir nur e2 zu bestimmen. Offenbar
gilt
10 · 10 + (−1) · 99 = 1 .
Also ist e2 = −99 und wir erhalten eine Lösung
x = (−2) · (−99) = 198 .
Aus einer Größenordnungsbetrachtung folgt:
102 · 99 = 198 + 10 · 990 .
63
Die Voraussetzung (4.12) kann im allgemeinen nicht weggelassen werden, wie folgendes Beispiel zeigt. gesucht ist eine zahl x ∈ Z mit x ≡ 1 mod 15, x ≡ 2 mod 21 . Da 3 ein Teiler von
15 und 21 ist, gilt auch x ≡ 1 mod 3, x ≡ 2 mod 3 . Dies ist aber ein Widerspruch, da kein x
modulo 3 den Rest 1 und den Rest 2 haben kann. Aber es gibt durchaus Resultate ohne diese
Voraussetzung.
Die Lösung x in Satz 4.5.1 kann offensichtlich eindeutig gemacht werden durch die Forderung
0 ≤ x < m.
4.6
1.)
Übungen
Sei g : N ∋ n 7−→ n(n2 + 11) ∈ N . Zeige:
(a) g ist injektiv, aber nicht surjektiv.
(b) 6 ist ein Teiler von 3n2 + 3n + 12 für alle n ∈ N .
(c) 6 ist ein Teiler von g(n) für alle n ∈ N .
2.)
Sei σ ∈ Sm , m ≥ 2 . Die zu σ gehörende Permutationsmatrix ist die Matrix A = Aσ =
(aij )1≤i,j≤m mit Einträgen
(
1 , falls i = σ(j)
.
aij =
0 , sonst
Stelle die Permutationsmatrix für
1 2 3
1 2 3
und τ :=
σ :=
2 1 3
2 3 1
auf.
3.)
Sei σ ∈ Sm , m ≥ 2 .
(a)
Zeige, dass durch
σ
x ∼ y : ⇐⇒ ∃k ∈ N(y = σ
· · ◦ σ}(x)) , x, y ∈ Nm ,
| ◦ ·{z
k−mal
eine Äquivalenzrelation auf Nm erklärt wird.
(b) Wieviele Äquivalenzklassen gibt es im konkreten Fall
1 2 3
m = 3 , σ :=
2 1 3
4.)
Sei σ ∈ Sm , m ≥ 2 . Ist eine Zerlegung σ = τ1 ◦ · · · τr von σ in Transpositionen τ1 , . . . , τr
eindeutig?
5.)
Zeige, dass durch
V4 :=
1234
1234
1234
1234
,
,
,
1234
4321
2143
3412
in S4 eine Gruppe gebildet wird; die Verknüpfung sei die in S4 . Ist V4 eine Teilmenge
von A4 ?
6.)
Zeige, das die Matrizen der Form
a b
0 1
mit a, b ∈ Z3 und a 6= 0 mit der gewöhnlichen Matrixmultiplikation eine Gruppe bilden.
64
7.)
Folgere aus der Tatsache, dass S3 nicht kommutativ ist, dass jede Gruppe Sm , m ≥ 4,
auch nicht kommutativ ist.
8.)
Unter der Ordnung einer Permutation σ versteht man die kleinste natürliche Zahl n,
so dass σ n = id . Bestimme die Ordnung von
1234
1234
,
.
2143
2341
65