1 Zeitlich veränderliche Felder
Werbung

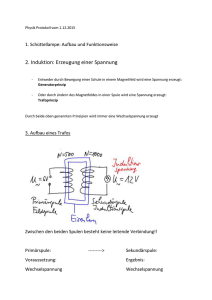
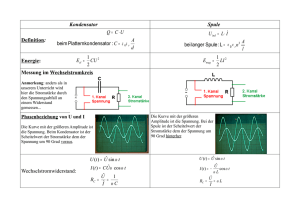
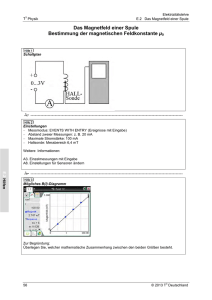
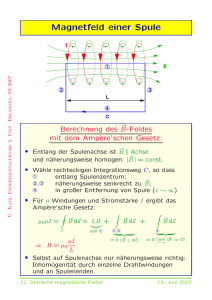
Experimentalphysik II Zeitlich veränderliche Felder und Wechselstrom Ferienkurs Sommersemester 2009 Martina Stadlmeier 09.09.2009 Inhaltsverzeichnis 1 Zeitlich veränderliche Felder 1.1 Faradaysches Induktionsgesetz . . . . 1.2 Lenzsche Regel . . . . . . . . . . . . . . 1.3 Selbstinduktion . . . . . . . . . . . . . 1.3.1 Einschaltvorgang an Spule . . . 1.3.2 Ausschaltvorgang an Spule . . . 1.3.3 Induktivität einer Zylinderspule 1.4 Energie des magnetischen Feldes . . . 1.5 Verschiebungsstrom . . . . . . . . . . . 1.6 Maxwell-Gleichungen . . . . . . . . . . . . . . . . . . . 2 Wechselstrom 2.1 Die Elemente eines Wechselstromkreises 2.1.1 Ohmscher Widerstand . . . . . . . 2.1.2 Kondensator . . . . . . . . . . . . 2.1.3 Spule . . . . . . . . . . . . . . . . . 2.2 Der RCL-Wechselstromkreis . . . . . . . 2.3 Leistung im Wechselstromkreis . . . . . 2.4 Resonanz im Wechselstromkreis . . . . . 2.5 Transformator . . . . . . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 3 3 3 4 4 5 5 6 . . . . . . . . 7 7 7 8 8 9 10 11 11 1 Zeitlich veränderliche Felder Die bereits bekannten Gleichungen → − → − → − rot E = 0 rot B = µ0 j → − − → div E = ρ0 div B = 0 → − → − − → E = −grad φ B = rot A → − − → j = σE beschreiben statische elektrische und magnetische Felder. Diese werden durch → − ruhende Ladungen (ρ) und stationäre (=zeitlich konstante) Ströme ( j ) erzeugt. Nun stellt sich die Frage, wie diese Felder und die dazugehörigen Feldgleichun→ − gen sich ändern, wenn sich ρ und j zeitlich ändern. 1.1 Faradaysches Induktionsgesetz Befindet sich ein Leiter (gerader Leiter, Leiterschlaufe,...) in einem Magnetfeld, das sich zeitlich ändert, also dB 6= 0, oder ändert sich die Schlaufenfläche A, die dt → − senkrecht zur Richtung des Magnetfeldes B steht, so stell man im Leiter eine Induktionsspannung fest: Uind = − dtd R→ − − → B d A = − dφdtm Faradaysches Induktionsgesetz Wir betrachten nun eine Spule mit nur einer Windung, die die Fläche A umschließt. Orientierung und der Betrag von A seien konstant. Ändert sich das → − äußere Magnetfeld B zeitlich, so entsteht eine Iduktionsspannung: → R − → − Uind = − ddtB · d A Andererseits kann man die entstehende Spannung auch durch ein elektrisches Feld erklären: H− → → U = E · d− s Mit dem Stokes’schen Satz gelangt man zu: H− R R → − → − − → E d→ s = rot E d A = − → − dB dt → − dA → − → − ⇒ rot E = − dtd B „Ein zeitlich sich änderendes magnetisches Feld erzeugt ein elektrisches Wirbelfeld“ Anders als im elektrostatischen Fall sind diese elektrischen Feldlinien jedoch → − geschlossen! Auch gibt es kein skalares Potential φ mehr, von dem E erzeugt wird! 2 1.2 Lenzsche Regel Induktionsstrom und -spannung sind stets so gerichtet, dass sie der Ursache ihrer Entstehung entgegen wirken. Diese Regel ist vor allem wichtig bei Rechnungen, die unter Beachtung der Vorzeichen zu machen sind. Technische Anwendung sind beispielsweise Wirbelstrombremsen: in ausgedehnten Leitern enstehen Wirbelströme (=Induktionsstrom), deren Joul’schen Verluste kinetische in Wärmeenergie umwandeln ⇒ Bremswirkung. 1.3 Selbstinduktion Ändert sich in einer Spule die Stromstärke I, so ändert sich dadurch auch die Stärke des von der Spule erzeugten Magnetfeldes bzw. φm . Dies wiederum verursacht dann eine Induktionsspannung, die nach der Lenz’schen Regel der angelegten Spannung entgegen gerichtet ist. Der magnetische Fluss φm ist proportional zu I mit Proportionalitätskonstante L (Induktivität): φm = L · I Uind = −L dI dt 1.3.1 Einschaltvorgang an Spule U0 = −Uind + UR = L dI + RI = LI˙ + RI dt R Mit dem Ansatz I(t) = K · e−( L )t und der Anfangsbedingung I(0) = I0 erhält man als Lösung der Differentialgleichung: I(t) = U0 (1 R R − e−( L )t ) Der Strom nimmt also nicht sprunghaft seinen Maximalwert UR0 an. Je größer die Spulenkonstante L, desto größer ist auch die Zeitverzögerung. (Anschaulich: die Spule kann U0 umso besser „bremsen“, je gößer L ist.) 3 1.3.2 Ausschaltvorgang an Spule Vor dem Öffnen des Schalters gilt: I1 = U0 R1 < I2 = U0 R2 Zur Zeit t = 0 werde der Schalter geöffnet. Nun entsteht in der Spule eine Iduktionsspannung, die versucht die zuvor angelegte Spannung und damit den in diesem Zweig fließenden Strom I2 aufrecht zu erhalten. (Anschaulich: Spule fungiert als Spannungsquelle, R = R1 + R2 ist Lastwiderstand. Somit: Uind = RI2 ˙ 0 = LI2 + RI2 ⇒ I˙2 = − R I L 2 R Mit dem Ansatz I2 (t) = K ·e−( L )t und der Anfangsbedingung I2 (0) = I0 gelangt man zu der Lösung: R I2 (t) = I0 · e−( L )t Für die Induktionsspannung mit U0 = R2 I0 gilt: R Uind = −L dIdt2 = I0 R · e−( L )t R 2 ⇒ Uind = U0 R1R+R · e−( L )t 2 Somit können bei t = 0 große Induktionsspitzen entstehen, die R1 unter Umständen sogar zerstören, da I1 = −I2 . 1.3.3 Induktivität einer Zylinderspule Das Magnetfeld im Inneren einer Spule mit Länge l und N Windungen (Windungsdichte n = Nl ) ist bereits bekannt: B = µ0 Nl I = µ0 nI R φm = B dA = BA = µ0 nIA dφm dt = µ0 nA · dI dt Uind = −N dφdtm = −L dI dt ⇒ µ0 Nl A = L dI N dt ⇒ L = µ0 n2 Al L = µ0 n 2 V V ist das von der Spule eingelschlossene Volumen. 4 1.4 Energie des magnetischen Feldes Die beim „Entladen“ der Spule dissipierte Energie wird im Widerstand R in Joul’sche Wärme umgewandelt, also: R∞ R∞ R∞ R∞ R Wmag = 0 P dt = 0 U I dt = 0 RI 2 dt = R 0 I02 · e−( L )t dt = 12 LI02 ⇒ Wmag = 12 LI02 Für die Energiedichte ωmag = Wmag V gilt dann: ωmag = 1 B2 2µ0 = 12 µ0 H 2 Vergleich: magnetisches Feld - elektrisches Feld gespeicherte Energie Energiedichte Wmag = 12 LI02 Wel = 12 CU02 1 B2 2µ0 ωel = 21 0 E 2 ωmag = Mit der wichtigen Beziehung c2 = 1 µ0 0 erhält man für die Energiedichte eines elektro-magnetischen Feldes: ωem = 12 0 (E 2 + c2 B 2 ) In Materie: ωem = 12 0 (E 2 + c2 2 B ) µ 1.5 Verschiebungsstrom H− R− → → → → − Das Ampéresche Gesetz B d− s = µ0 j d A darf nur in differentieller Form → − → − rot B = µ0 j geschrieben werden, wenn das obige Integral für beliebige Kurven C und deren umschlossenen Fläche A gilt. Das in P1 gemessene Magnetfeld lässt sich mit Ampére berechnen, nicht jedoch → − in P2 (da dort j = 0, weil ja kein Strom fließt). → − ⇒ Einführung des sogenannten Verschiebungsstroms j v , der zwischen den Kondesatorplatten herrscht. Erklärung: bei Wechselstrom ändert sich die Ladung Q auf den Platten mit der Zeit 5 I= dQ dt = →− − → d ( A E ) dt 0 = 0 A · − → jv= d E dt = 0 A ∂E ∂t I A → − ⇒ j v = 0 ∂E ∂t Hieraus folgt dann: H→ R − − − − → → − → B d→ s = µ0 ( j + j v ) d A → − → − − → rot B = µ0 ( j + j v ) → − → − → − rot B = µ0 j + µ0 0 ∂∂tE Dies bedeutet physikalisch gesehen: Magnetfelder werden nicht nur von Strö→ − → − men ( j ) sondern auch von zeitlich veränderlichen elektrischen Feldern ( ∂∂tE 6= 0) erzeugt. 1.6 Maxwell-Gleichungen Alle diese bisher hergeleiteten fundamentalen Beziehungen sind zusammengefasst in den Maxwell’schen Gleichungen: → − → ∂ − rot E = − ∂t B → → − → 1 ∂− − rot B = µ0 j + c2 ∂tE → − div E = ρ0 → − div B = 0 „Elektrische Felder werden von Ladungen (ρ) und zeitlich veränderlichen → − mangetischen Feldern ( ∂∂tB 6= 0) erzeugt. → − Magnetische Felder werden von Strömen ( j ) und zeitlich veränderlichen → − elektrischen Feldern ( ∂∂tE 6= 0) erzeugt.“ → − → → − − → Zusammen mit der Lorentzkraft F = q( E + − v × B ) und der Newtonschen Bewegungsgleichung F = ṗ werden hiermit alle elektromagnetischen Phänomene beschrieben. 6 2 Wechselstrom Bei der Betrachtung von Wechselstrom geht man im einfachsten Fall von einer sin- oder cos-förmigen Eingangsspannung U aus: U = U0 · sin ωt Dabei ist ω = 2πf die konstante Kreisfrequenz der angelegten Sannung. 2.1 Die Elemente eines Wechselstromkreises Neben der Spannungsquelle U sind das: • Ohmscher Widerstand R • Kondensator (Kapazität) C • Spule (Induktivität) L 2.1.1 Ohmscher Widerstand UR = U0 · sin ωt Über den Zusammenhang R = U I gelangt man zu: IR = U0 R sin ωt Somit ist ersichtlich, dass Strom und Spannung in Phase sind. Die Phasenverschiebung ϕ = 0. Besonders schön sieht man diesen Zusammenhang im Zeigerdiagramm Die Länge der Pfeile steht für die Maximalamplitude von Strom bzw. Spannung. Auf die vertikale Achse wird der jeweilige Momentanwert von Strom und Spannung projeziert. Die Phasenverschiebung ist in diesem Fall null, weshalb der Winkel zwischen Strom-Zeiger und Spannungs-Zeiger ebenfalls null ist. 7 2.1.2 Kondensator UC = U0 sin ωt Die Ladung Q auf den Kondensatorplatten ist nun auch zeitabhängig: Q(t) = C · UC (t) = CU0 · sin ωt Mit Ableiten erhält man für die Stromstärke IC (t) IC (t) = IC (t) = dQ dt U0 XC = CωU0 cos ωt cos ωt = I0 · cos ωt wobei XC = 1 ωC als kapazitiver Blindwiderstand bezeichnet wird. Man erkennt hieraus, dass Strom und Spannung um π2 , also um einen Winkel von 90◦ phasenverschoben sind: 2.1.3 Spule UL = U0 sin ωt Außerdem gilt für eine Spule: UL = L dI dt Durch Integration erhält man dann: U0 IL = − Lω cos ωt = − XUL0 = −I0 cos ωt 8 wobei wieder -wie schon beim Kondensator- der induktive Blindwiderstand XL eingeführt wird. XL = Lω Auch hier sind Strom und Spannung wieder um π2 phasenverschoben. Zu beachten ist diesmal jedoch das negative Vorzeichen, also dass nun die Spannung dem Strom vorauseilt (anders als beim Kondensator!): 2.2 Der RCL-Wechselstromkreis Auch hier gilt wieder: U (t) = U0 · sin ωt I(t) = I0 · sin(ωt + ϕ) Zu bestimmen sind nun I0 und die Phasenverschiebung ϕ in Abhängigkeit der bekannten Größen R, C und L. Anwendung der Maschenregel führt zu: U (t) = UR (t) + UC (t) + UL (t) Außerdem gilt: U0R = RI0 U0L = XL I0 U0C = XC I0 9 Aus dem Zeigerdiagramm kann man folgern, dass sich die Gesamtspannung berechnen lässt durch: p p 2 + (U0L − U0C )2 = I0 R2 + (XL − XC )2 U0 = U0R Um die Gleichung wie in gewohnter Form schreiben zu können, definiert man den Scheinwiderstand (oder die Impedanz) Z des Wechselstromkreises: p Z = R2 + (XL − XC )2 U0 Z I0 = Für die Phasenverschiebung ϕ liest man aus dem Zeigerdiagramm ab: tan ϕ = XL −XC R Ergebnis: I0 ist abhänging von der Spannungsamplitude U0 , nicht jedoch ϕ. Dies ist auch anschaulich, denn eine ansteigende bzw. abfallende Spannung ändert zwar den Strom, sollte aber keinen Einfluss auf die Phasenverschiebung haben. Anmerkung: Im obigen Zeigerdiagramm war die Wahl XL > XC willkürlich. Für XC > XL bleiben die Gleichungen unverändert, insbesondere hat dies keine Auswirkung auf die Impedanz. Allerdings erhält der Winkel ein negatives Vorzeichen, was physikalisch bedeutet, dass nun der Strom der der Spannung vorauseilt (Anschaulich: der kapazitive Teil der Phasenverschiebung überwiegt). 2.3 Leistung im Wechselstromkreis Die elektrische Leistung ist definiert als: P =U ·I Neu definiert werden für Wechselstromkreise die sogenannten Effektivwerte für Strom und Spannung: U0 Uef f = √ 2 Ief f = √I02 Sei nun U (t) = U0 sin ωt I(t) = I0 sin ωt Somit ist jetzt auch P zeitabhängig: P (t) = U (t) · I(t) = U0 I0 sin2 ωt Interessant ist allerdings der zeitliche Mittelwert: R P = T1 U0 I0 · sin ωt · sin(ωt − ϕ) dt = U0 I0 2 cos ϕ P = Uef f Ief f · cos ϕ cos ϕ wird als Leistungsfaktor bezeichnet. Die in Spule oder Kondensator aufgenommene Leistung (ϕ = ± π2 ) heißt Blindleistung (wird wieder abgegeben), die in einem ohmschen Widerstand tatsächlich verbrauchte Leistung (ϕ = 0) nennt man W irkleistung. 10 2.4 Resonanz im Wechselstromkreis Bereits bekannt: I0 = U0 Z ⇒ Ief f = Uef f Z =√ Uef f R2 +(XL −XC )2 Jeder RCL-Kreis besitzt eine Resonanzfrequenz ω0 , bei der Ief f bei gegebenem Uef f , R, C, L maximal wird. Dies gilt genau dann, wenn XL = XC also ω0 = √1 LC 2.5 Transformator Für Transformatoren, also gekoppelte Induktivitäten mit jeweils N Windungen pro Spule gilt: U2 U1 2 = −N N1 11