Netzwerk-Simplex Algorithmus
Werbung

Netzwerk Simplex Algorithmus für
Minimum Cost Flow Probleme
Jan Burkl
13. Juni 2003
Seminar Universität Trier
Sommersemester 2003
Prof. S. Näher, O. Zlotowski
1
Inhaltsverzeichnis
1 Einleitung
3
2 Bezeichnungen und Definitionen
3
3 Spanning Tree Solution
6
4 Beschreibung einer Spanning Tree Structure
10
5 Knotenpotentiale berechnen
12
6 Initialer Spannbaum
14
7 Simplex-Algorithmus
16
7.1
Entering Arc
. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
7.1.1
Dantzig’s Pivot Regel . . . . . . . . . . . . . . . . . . . 17
7.1.2
First Eligable Arc Rule . . . . . . . . . . . . . . . . . . 17
7.1.3
Kandidaten-Liste Pivot-Regel . . . . . . . . . . . . . . 18
7.2
Leaving Arc . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7.3
Spannbaum updaten . . . . . . . . . . . . . . . . . . . . . . . 20
7.4
Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
8 Strongly Feasible Spanning Tree
8.1
25
Leaving Arc Rule . . . . . . . . . . . . . . . . . . . . . . . . . 26
2
1
Einleitung
Der Simplex-Algorithmus ist einer der mächtigsten Algorithmen zum Lösen
von Optimierungsproblemen. Obwohl er nicht direkt für eine Netzwerkstruktur konstruiert wurde, lässt er sich doch einfach modifizieren, um ein Minimum Cost Flow Problem effizient zu lösen.
Im einzelnen betrachtet diese Seminararbeit folgende Aspekte:
Es wird gezeigt, dass jedes Minimum Cost Flow Problem mindestens eine Spanning Tree Solution besitzt. Diese Spanning Tree Solutions sind die
Grundlage der Simplex-Methode, da von einer Lösung zur nächsten gewechselt wird, bis die Optimallösung gefunden ist. Als nächstes wird beschrieben,
wie solche Spanning Trees am geschicktesten implementiert werden können,
damit der Algorithmus auch effizient ausgeführt werden kann. Bevor dann
die eigentliche Simplex-Methode erklärt wird, muss vorher gezeigt werden,
wie die sogenannten Knotenpotentiale berechnet werden und ein initialer
Spannbaum konstruiert wird. Auch dieser Schritt muss genau durchdacht
sein, damit der Netzwerk-Simplex-Algorithmus effizient ausgeführt werden
kann. Schließlich wird eine einfache Methode beschrieben, wie der Algorithmus so modifiziert werden kann, dass eine Terminierung bzw. die Finitheit
garantiert ist.
2
Bezeichnungen und Definitionen
Einige grundlegende Begriffe aus der Graphentheorie werden in dieser Arbeit
vorausgesetzt. So betrachten wir ein gerichtetes Netzwerk N mit n Knoten
und m gerichteten Kanten. Die Menge der gerichteten Kanten nennen wir
E. Auf diesem Netzwerk N können wir ein sogenanntes Minimum Cost Flow
Problem beschreiben, dass wir mit Hilfe des Netzwerk Simplex Algorithmus
3
lösen können:
Definition 2.1 (Min Cost Flow Problem).
Sei N ein gerichtetes Netzwerk. Jede Kante (i, j) ∈ E hat bestimmte Kosten
cij , die die Kosten pro Flusseinheit auf dieser Kante beschreiben. Außerdem
hat jede Kante (i, j) ∈ E eine obere Kapazitätsschranke uij , das die maximal
mögliche Menge von Flusseinheiten auf dieser Kante beschreibt. Mit jedem
Knoten i gibt es auch einen ganzzahligen Wert b(i), der das Angebot (b(i) >
0) bzw. die Nachfrage (b(i) < 0) des Knotens angibt. Der Fluss, der über
eine Kante (i, j) ∈ E fließt, wird mit xij bezeichnet.
Das Min Cost Flow Problem wird jetzt wie folgt definiert:
X
min
cij xij
(i,j)∈E
s.t.
X
X
xi,j −
{j:(i,j)∈E}
xji = b(i) ∀i ∈ N
(1)
0 ≤ xij ≤ uij (i, j) ∈ E
(2)
{j:(j,i)∈E}
Bemerkung 1.
Wir betrachten ausschließlich Netzwerke N, deren Kantenfluss nach unten
durch 0 beschränkt ist.
Bemerkung 2.
Wir sprechen von einem zulässigen Fluss x, wenn die Bedingungen (1) und
(2) für alle xij ((i, j) ∈ E) erfüllt sind.
Um aus dem zulässigen Fluss einen optimalen zulässigen Fluss zu berechnen, benötigt der Simplex Algorithmus den Spanning Tree.
4
Definition 2.2.
Ein zusammenhängender Graph ohne Kreis ist ein Spanning Tree T von N ,
wenn alle Knoten aus N auch in T enthalten sind.
Ein Spanning Tree T von N mit zulässigem Fluss entspricht einer Basislösung des Simplex Algorithmus.
Weiterhin benötigen wir die reduzierten Kosten aller Kanten:
Definition 2.3.
cπij bezeichnet die reduzierten Kosten einer Kante (i, j) ∈ E wenn gilt:
cπij = cij − π(i) + π(j),
wobei π(i) das Knotenpotential des Knotens i ist (Das Knotenpotential eines
Knotens i entspricht in einem Spanning Tree dem negativen Distanzwert von
der Wurzel zum Knoten i).
Da wir im Simplex Algorithmus mit den reduzierten Kosten arbeiten, ist
es wichtig den Zusammenhang zwischen den Funktionswerten
z(π) :=
X
cπij xij
(i,j)∈E
und
z(0) :=
X
cij xij
(i,j)∈E
zu verstehen.
Sei zu Beginn π(0). Wir erhöhen jetzt das Knotenpotential von Knoten k zu
π(k). Dadurch werden die reduzierten Kosten jeder ausgehenden Kante von
k verringert, während die reduzierten Kosten der eingehenden Kanten um
π(k) erhöht werden. Somit ändert sich der Zielfunktionswert um π(k)-mal
dem ausgehenden Fluss minus π(k)-mal dem eingehenden Fluss von k. Da
5
der ausgehende Fluss gleich dem eingehenden Fluss sein muss (Massenbalance), reduziert eine Erhöhung des Potentials von Knoten k um π(k) den
Zielfunktionswert um π(k)b(k). Wiederholt man dies für alle Knoten, erhält
man
z(0) − z(π) =
X
π(i)b(i).
i∈N
Für ein gegebenes π ist das Ergebnis konstant und somit gilt
min z(π) ≡ min z(0).
3
Spanning Tree Solution
Definition 3.1.
Sei x eine zulässige Lösung für ein Netzwerk N, dann heißt eine Kante (i, j)
• frei, wenn 0 < xij < uij ,
• beschränkt, wenn xij = 0 oder xij = uij ,
wobei xij der Fluss der Kante (i, j) ist und uij die obere Flussgrenze der
Kante (i, j). Der Einfachheit halber ist die untere Flussgrenze gleich 0.
Bemerkung 3.
Auf beschränkten Kanten kann man den Fluss nur verringern (xij = uij )
oder nur erhöhen (xij = 0).
Definition 3.2.
• Eine Lösung eines Netzwerks N heißt Cycle Free Solution, wenn sie
keinen Kreis enthält, der nur aus freien Kanten besteht.
6
• Eine Lösung heißt Spanning Tree Solution, wenn (zu einem Spanning Tree aus dem gegebenen Netzwerk) jede nicht-Baum-Kante eine
beschränkte Kante ist.
Bemerkung 4.
Jede Spanning Tree Solution ist eine Cycle Free Solution. Umgekehrt gilt dies
nicht.
Eine Cycle Free Solution erhalten wir in der Simplex-Methode immer,
wenn wir den Fluss des Kreises, der durch Einfügen einer Kante in den
Spannbaum entstanden ist, maximal erhöht haben (Kapitel 7.2). Diese Cycle
Free Solution können wir dann ganz einfach wieder zu einer Spanning Tree
Solution umbauen. Betrachtet man nur die freien Kanten einer Cycle Free
Solution, so erhält man einen Wald mit k Bäumen (im Spezialfall k = 1 direkt einen Spanning Tree), da nach Definition 3.2 jeder ursprüngliche Kreis
mindestens eine beschränkte Kante enthält. Wenn man jetzt mit k − 1 beschränkten Kanten alle k entstandenen Bäume zusammenfügt, erhält man
eine Spanning-Tree-Solution.
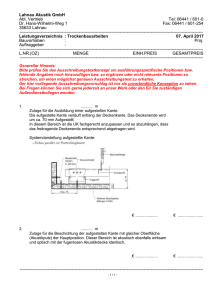
Beispiel 3.1.
Wir können an Beispiel aus Abbildung 3.1 erkennen, dass es möglich ist aus
einer Cycle Free Solution verschiedene Spanning Tree Solutions zu gewinnen.
Denkbar wäre auch eine Lösung mit den Kanten (1, 3), (3, 2), (3, 4).
Eine Spanning Tree Solution teilt die Menge der Kanten des Netzwerks
in drei Gruppen auf:
T: Alle Kanten im Spanning Tree
L: Alle nicht-Baum-Kanten mit xij = 0
U: Alle nicht-Baum-Kanten mit xij = uij
7
(a) Beispiel-Netzwerk
(b) Alle freien Kanten
(c) Zwei mögliche Spanning Tree Solution
Abbildung 1: Konstruktion von Spanning Tree Solution aus einer Cycle Free
Solution
Wir nennen das Tupel (T,L,U) Spanning Tree Structure. Eine Spanning Tree
Structure heißt zulässig, wenn die zugehörige Spanning Tree Solution die
Kapazitätsschranken der Kanten erfüllt.
Bemerkung 5.
Wenn jede Baumkante eine freie Kante ist, so nennt man den Spanning Tree
nichtdegenerativ, andernfalls degenerativ.
Essentiell für die Durchführung des Simplex-Algorithmus ist der folgende
Satz. Dabei betrachten wir die reduzierten Kosten
cπij = cij − π(i) + π(i),
die wir in der Simplex-Methode als Optimalitätskriterium nutzen.
8
Satz 3.1 (Min-Cost-Flow Optimalitätsbedingungen).
Eine Spanning Tree Structure (T,L,U) ist ein optimale Spanning Tree Structure, wenn die Lösung zulässig ist und (für eine Wahl des Knotenpotentials
π) die reduzierten Kosten cπij folgende Bedingungen erfüllen:
a) cπij = 0, ∀(i, j) ∈ T
b) cπij ≥ 0, ∀(i, j) ∈ L
c) cπij ≤ 0, ∀(i, j) ∈ U
Beweis.
Sei x∗ die zur Spanning Tree Solution (T,L,U) zugehörige Lösung. Wir wissen,
dass für ein bestimmtes π die Bedingungen erfüllt sind.
Wir müssen jetzt zeigen, dass x∗ eine optimale Lösung des Min-Cost-Flow
Problems ist.
Da
cπij = cij − π(i) + π(j)
gilt nach Kapitel 2
min(
X
cij xij ) ≡ min(
(i,j)∈A
X
cπij xij )
(i,j)∈A
Für ein gegebenes π gilt weiter:
X
min(
cπij xij )
(i,j)∈A
X
X
P
π
π
π
cij xij
≡ min
cij xij + (i,j)∈L cij xij +
|{z}
(i,j)∈T
(i,j)∈U
| {z }
≤0
|
{z
}
=0
≡
min
≤0
P
π
(i,j)∈L cij xij
9
−
π
(i,j)∈U |cij |xij
P
(3)
Da für eine beliebige Lösung x
xij ≥ x∗ij ∀(i, j) ∈ L
und
xij ≤ x∗ij ∀(i, j) ∈ U
gilt, kann (3) mit der Lösung x nur größer oder gleich des Zielfunktionswertes
der Lösung x∗ werden.
Bemerkung 6.
Eine Spanning Tree Structure ist optimal, wenn die zugehörige Spanning Tree
Solution eine Optimallösung des Min-Cost-Flow Problems ist.
4
Beschreibung einer Spanning Tree Structure
Damit der Simplex-Algorithmus effektiv arbeiten kann, muss der Spanning
Tree geeignet im Computer dargestellt werden. Wir stellen uns den Spanning
Tree wie folgt vor:
Von einer Wurzel (root) hängt der Baum nach unten. Um diese Struktur
darstellen zu können, brauchen wir drei Indizes:
Definition 4.1.
• Der Predecessor Index pred(i) bezeichnet den Knoten j, der auf dem
eindeutigen Pfad von i zur Wurzel liegt, wenn die Kante (i,j) existiert.
D.h. pred(i)=j ist der direkte Vorgänger von i auf dem Weg von i zur
Wurzel.
• Der Depth Index depth(i) bezeichnet die Anzahl der Kanten des eindeutigen Pfades von i zur Wurzel, d.h. die Tiefe des Knotens in dem
hängenden Baum, wobei die Wurzel Tiefe 0 hat.
10
i
1 2 3 4 5 6 7
8
9 10 11
pred(i)
0 1 1 2 3 3 4
4
6
8
8
depth(i)
0 1 1 2 2 2 3
3
3
4
4
thread(i) 2 4 6 7 3 9 8 10 1 11
5
Abbildung 2: Beispiel eines Netzwerks mit dazugehörigen Baumindizes
• Der Thread Index thread(i) bezeichnet den direkten Nachfolger j des
Knotens i bei der vollständigen Traversierung des Baumes. Die Thread
Indizes definieren somit einen Weg von der Wurzel über alle Knoten
zurück zur Wurzel. Diese Thread Indizes sind nicht eindeutig bestimmt.
Je nach Anwendung kann man sie z.B. durch einen Preorder Traversal
erreichen.
Beispiel 4.1.
Knoten 1 ist die Wurzel.
Die gestrichelten Kanten in Abb. 2 entsprechen dem Traversierungspfad des
Netzwerks.
11
5
Knotenpotentiale berechnen
Um die im vorigen Kapitel erwähnten reduzierten Kosten ermitteln zu können,
müssen vorher die Potentiale aller Knoten berechnet werden. Dafür können
wir das Knotenpotential des Wurzelknotens beliebig setzen (hier gleich 0)
und können so alle anderen Potentiale berechnen.
Lemma 5.1.
Das Knotenpotential des Wurzelknotens kann π(1) = 0 gesetzt werden, ohne
dass diese Änderung Auswirkung auf die reduzierten Kosten aller Kanten
hat.
Beweis.
Addition einer Konstanten k bewirkt keine Änderung der reduzierten Kosten,
da
cπij = cij − π(i) + π(j) = cij − [π(i) + k] + [π(j) + k].
Wir nutzen jetzt die Eigenschaft aus, dass gilt:
cπij = cij − π(i) + π(j) = 0 ∀(i, j) ∈ T
(4)
Somit können wir, wenn ein Knotenpotential der Gleichung 4 bekannt ist,
das Potential des anderen Knotens berechnen. Dabei starten wir mit dem
Wurzelknoten i = 1, da nach Lemma 5.1 π(1) = π(i) = 0 bekannt ist und
berechnen sukzessive anhand der Thread Indizes und des folgenden Algorithmus alle Knotenpotentiale.
Algorithmus 1.
12
procedure compute-potentials;
begin
π(1) := 0;
j := thread(1);
while j 6= 1 do
begin
i := pred(j);
if (i, j) ∈ N then π(j) := π(i) − cij ;
if (j, i) ∈ N then π(j) := π(i) + cij ;
j := thread(j);
end;
end;
Laufzeitanalyse:
Die Prozedur braucht O(1) Zeit für einen Iterationsdurchlauf, der n − 1-mal
durchgeführt wird. Somit hat die Prozedur eine Gesamtlaufzeit von O(n).
Beispiel 5.1.
Wir verwenden den zweiten Spanning Tree aus Beispiel 3.1 c):
π(1) = 0
pred(2) = 1 ⇒ π(2) = π(1) − c12 = −5
pred(3) = 1 ⇒ π(3) = π(1) − c13 = −3
pred(4) = 2 ⇒ π(4) = π(2) − c24 = −5 − 2 = −7
An diesem Beispiel kann man erkennen, dass die Knotenpotentiale nichts
anderes als die negativen Distanzwerte vom Wurzelknoten aus darstellen.
13
6
Initialer Spannbaum
Damit der Simplex Algorithmus auf jedes beliebige Netzwerk N angewendet
werden kann, muss zunächst ein initialer Spannbaum mit gültigem Fluss
aus N konstruiert werden. Der initiale Spannbaum entspricht einer gültigen
Startlösung. Um eine solche Startlösung zu erreichen, fügt man einen neuen,
künstlichen Knoten r ein und n (Anzahl der Knoten in N ) neue, künstliche
Kanten, die wie folgt konstruiert werden:
Wir untersuchen jeden Knoten j aus N . Wenn b(j) > 0, fügen wir eine Kante
(j, r) ein, mit einem Fluss von b(j). Ist b(j) ≤ 0, so fügen wir eine Kante (r, j)
mit Fluss von −b(j) ein. Alle Kanten haben unendlich grosse Kapazität,
ebenso setzt man ihre Kosten sehr hoch, damit es auf jeden Fall teurer ist,
wenn Fluss über künstliche Kanten fließt. Die Kosten der künstlichen Kanten
können sich z.B. wie folgt ergeben:
crk = ckr =
X
cij + 1 ∀k ∈ N.
(i,j)∈N
Alle anderen Kanten haben zu diesem Zeitpunkt noch keinen Fluss.
Wir erhalten so einen Spanning Tree aus dem Orginalnetzwerk mit Wurzel r
und ausschließlich künstlichen Kanten zu allen Knoten aus N mit zulässigem
14
Fluss, wobei die Flusseinheiten zu diesem Zeitpunkt nur von den Senken über
den Knoten r zu den Quellen fließt.
Beispiel 6.1.
Wir nutzen das Netzwerk N aus Bsp. 3.1.
Abb. 3(a) zeigt das ursprüngliche Netzwerk, in Abb. 3(b) sieht man den
konstruierten Spanning Tree mit künstlichem Wurzelknoten und künstlichen
Kanten. In diesem Beispiel entspricht Knoten 1 der Quelle s, Knoten 2 der
Senke t und der neue, künstliche Knoten r ist Knoten 5.
(a) Beispiel-Netzwerk
(b) Konstruierter Spanning Tree
Abbildung 3: Initialer Spannbaum
Existiert eine Lösung für das gegebene Problem, dann berechnet der Simplex Algorithmus einen Fluss x, bei dem nur Kanten des Orginalnetzwerks
positive Flusswerte haben. Daher setzt man die Kosten der künstlichen Kanten so hoch, dass es auf jeden Fall günstiger ist, Fluss über die Kanten des
gegebenen Netzwerks fließen zu lassen, wenn das Problem lösbar ist.
15
7
Simplex-Algorithmus
Sei (T, L, U ) eine mögliche Spanning Tree Struktur des Min-Cost-Flow-Problems
und π die entsprechenden Knotenpotentiale. Nach Satz 3.1 ist diese Lösung
optimal, wenn gilt:
∀(i, j) ∈ L : cπij ≥ 0,
∀(i, j) ∈ U : cπij ≤ 0.
Sollten die Bedingungen nicht erfüllt sein, so muss eine Kante durch eine andere ersetzt werden, damit der Zielfunktionswert in Richtung des optimalen
Werts verbessert wird. Dadurch ändern sich bestimmte Knotenpotentiale, sowie reduzierte Kosten einzelner Kanten. Diese müssen angepasst werden und
die Optimalitätsbedingungen erneut überprüft werden. Im einzelnen lautet
der Simplex -Algorithmus wie folgt:
Algorithmus 2.
algorithm network simplex
begin
konstruiere initialen Spannbaum;
solange die Optimalitätsbedingungen nicht erfüllt sind tue
wähle eine einzufügende Kante, die die Optimalitätsbedingung verletzt;
füge diese Kante ein und bestimme die wegfallende Kante;
baue den Spannbaum neu auf und passe x und π an;
end;
end;
Bemerkung 7.
Sollte noch Fluss auf den eingefügten künstlichen Kanten fließen, obwohl alle
16
Optimalitätskriterien erfüllt sind, so gibt es keine zulässige Lösung für dieses
Netzwerk.
7.1
Entering Arc
Die einzufügende Kante muss aus der Menge der Kanten stammen, die die
obigen Optimalitätsbedingungen nicht erfüllen (sie kann also nur aus L oder
U stammen). Für die Wahl dieser Kante gibt es verschiedene Pivotregeln,
drei werden an dieser Stelle vorgestellt.
7.1.1
Dantzig’s Pivot Regel
Die Regel wählt in jeder Iteration die Kante mit der höchsten Verletzung. (Als
Verletzung einer Kante (i, j) bezeichnen wir |cπij |). Der Hintergrund zu dieser
Regel ist die größere Verringerung des Zielfunktionswertes bei einer hohen
Verletzung, wenn alle Kandidaten eine ähnlich hohe Flussänderung bewirken.
Der Algorithmus muss also alle Kanten aus L und U nach der maximalen
Verletzung durchsuchen. Da dies jedoch bei jeder Iteration gemacht werden
muss, ist diese Regel auf Grund der hohen Laufzeit für die Praxis nicht
geeignet.
7.1.2
First Eligable Arc Rule
Bei dieser Regel werden alle Kanten durchsucht und die erste geeignete Kante ausgewählt. Eine bekannte Variante dieser Regel arbeitet nach der ’wraparound fashion’. Dabei wird die letzte gewählte Kante als Startpunkt für die
neue Suche gesetzt. Durch diese Tatsache wird schnell die neue, einzufügende
Kante gefunden. Diese hat aber in den meisten Fällen nur eine geringe Verletzung und somit eine kleine Reduzierung des Zielfunktionswertes. Durch
17
die vielen daraus resultierenden Iterationen ist auch diese Regel nicht für die
Praxis geeignet.
7.1.3
Kandidaten-Liste Pivot-Regel
Dieser Algorithmus ist eine Zwei-Phasen-Prozedur, bestehend aus einer Hauptiteration und einer Nebeniteration. In der Hauptiteration werden ausgehend
von der Wurzel alle geeigneten Kanten in eine Kandidatenliste eingefügt. Das
wiederholt man für Knoten 2, 3, ..., bis entweder alle geeigneten Kanten eingefügt sind oder der für die Liste allokierte Speicherplatz belegt ist. Die
nächste Hauptiteration beginnt an dem Knoten, an dem die vorhergehende
Iteration endete. In der Nebeniteration wird die Liste nach der Kante mit
der maximalen Verletzung durchsucht. Gleichzeitig werden alle nicht mehr
geeigneten Kanten wieder aus der Liste entfernt. Das wiederholt sich solange,
bis die Liste leer ist oder die angegebene maximale Anzahl der Iterationsdurchläufe erreicht ist. Anschließend wird eine neue Liste in der Hauptiteration aufgebaut. Man kann erkennen, dass diese Regel viele Möglichkeiten zur
Optimierung bietet und sowohl die Dantzig’s Pivot Regel als auch die First
Eligable Arc Rule Spezialfälle der Kandidaten-Liste Pivot-Regel sind(Größe
der Kandidatenliste = 1 ⇒ First Eligable Arc Rule; Größe der Kandidatenliste = ∞ ⇒ Dantzig‘s Pivot Regel).
In der Praxis hat sich diese Mischung aus den beiden anderen Pivotregeln
auf Grund ihrer schnelleren Laufzeit bewährt.
7.2
Leaving Arc
Nachdem eine Kante eingefügt wurde, muss auch wieder eine entfernt werden,
damit die Spanning Tree Struktur wieder aufgebaut werden kann.
Sei (k, l) die eingefügte Kante. (k, l) erzeugt genau einen Kreis W (Pivot18
Kreis), dessen Orientierung der Richtung von (k, l) entspricht, wenn (k, l) ∈ L
und entgegengesetzt, wenn (k, l) ∈ U . So wird der Kreis W partitioniert in W
und W . Dabei enthält W alle Vorwärtskanten (entsprechend der Orientierung
des Pivot-Kreises), W alle Rückwärtskanten. Wir erhöhen den Fluss (entlang
W ) jetzt um
δ = min (δij | (i, j) ∈ W ) ,
wobei
u − x , wenn (i, j) ∈ W
ij
ij
.
δij =
x ,
wenn (i, j) ∈ W
ij
So erreicht mindestens eine Kante ihre obere bzw. untere Grenze. Diese Kante
(i, j) bzw. eine dieser Kanten (kann beliebig gewählt werden) heißt blockierende Kante. Diese wird aus T entfernt und in L eingefügt (wenn xij = 0)
oder in U eingefügt (wenn xij = uij ).
Bemerkung 8.
Ein positiver erhöhender Fluss entlang W erhöht den Fluss auf Vorwärtskanten, verringert ihn auf Rückwärtskanten.
Definition 7.1.
Eine Pivot-Operation heißt
• nichtdegenerative Iteration, wenn δ > 0,
• degenerative Iteration, wenn δ = 0.
Bemerkung 9.
Wenn es mehr als eine Kante gibt, die durch den erhöhenden Fluss an ihre
Grenzen stoßen, so wird der nächste Spanning Tree degenerativ sein.
19
Die Schwierigkeit bei diesem Verfahren liegt in der Erkennung des Kreises. Effizient lösen kann man dieses Problem, wenn man den Spanning Tree
vor Einfügen der neuen Kante (k, l) betrachtet. Jetzt werden in einer Schleife
die Vorgänger von k und l solange aufgerufen, bis der gemeinsame Vorgänger
gefunden ist. Das konkrete Vorgehen beschreibt der nachfolgende Algorithmus:
Algorithmus 3.
procedure identify-cycle;
begin
i:=k und j:=l;
while i 6= j do
begin
if depth(i) > depth(j) then i:=pred(i);
else
if depth(j) > depth(i) then j:=pred(j);
else i:=pred(i) und j:=pred(j);
end;
end;
7.3
Spannbaum updaten
Wenn die wegfallende Kante (p, q) gleich der eingefügten Kante (k, l) ist
(δ = δkl = ukl ), ändert sich T nicht, lediglich die Kante (k, l) wechselt von L
nach U oder umgekehrt. Ist (p, q) ungleich (k, l), so müssen einige Veränderungen vorgenommen werden. Als erstes wird (p, q) zu L hinzugefügt (wenn
xpq = 0), bzw. zu U (wenn xpq = upq ) hinzugefügt. Betrachten wir jetzt den
Spannbaum ohne die Kanten (p, q) und (k, l), so erhalten wir einen Teilbaum
20
T1 , der die Wurzel und entweder k oder l enthält. Der zweite Teilbaum T2
hängt dagegen entweder am Knoten p oder q. Der entsprechend andere Knoten befindet sich in T1 . Damit auch im neuen Spannbaum die Bedingung
cπij = 0 gilt, müssen die Knotenpotentiale in T1 oder in T2 geändert werden:
Wenn k ∈ T1 , dann müssen alle Knotenpotentiale um cπkl verringert werden,
wenn k ∈ T2 , dann müssen alle Knotenpotentiale um cπkl erhöht werden. Eine
genaue Beschreibung des Spannbaum-Updates liefert der folgende Algorithmus.
Algorithmus 4.
procedure update-potentials;
begin
if q ∈ T2 then y := q else y := p;
if k ∈ T1 then change := −cπkl else change := cπkl ;
π(y) := π(y) + change;
z:=thread(y);
while depth(z) > depth(y) do
begin
π(z) := π(z) + change;
z:=thread(z);
end;
end;
7.4
Beispiel
Wir nutzen erneut das bekannte Beispiel. Diesmal ist es das vollständige
Netzwerk mit Kantenkosten, Kantenbeschränkungen und Supply/Demand.
21
Als erstes wird der künstliche Knoten (5) eingefügt, inkl. aller künstlichen
Kanten. Wir lassen 4 Einheiten Fluss über die Kanten (1,5) und (5,4) fließen
und berechnen die Knotenpotentiale, wobei wir die Kosten der künstlichen
P
Kanten mit (i,j)∈N cij + 1 = 16 Einheiten veranschlagen. Mit dieser Berechnung der Kantenkosten ist bei allen Min-Cost-Flow Problemen sichergestellt,
dass es auf jeden Fall teurer ist, Fluss über die künstlichen Kanten fließen zu
lassen.
Somit haben wir den initialen Spannbaum (durchgezogene Kanten). Da die
Kante (1,3) die höchsten reduzierten Kosten besitzt (cπ13 = −29), wählen wir
diese als einzufügende Kante(grün). Weil δ jedoch 0 ist, kann der Fluss nicht
erhöht werden. Wir wählen daraufhin (5,3) als blockierende Kante(rot), und
entfernen diese aus dem Spannbaum, und fügen sie in die Menge L ein.
22
Das Knotenpotential von Knoten 3(rot) inkl. der reduzierten Kosten aller
inzidenten Kanten muss jetzt erneuert werden, woraufhin Kante (3,2) mit
cπ32 = −28 als neue Baumkante gewählt wird. Wiederum kann der Fluss
nicht erhöht werden, so wird Kante (5,2) nach L verschoben.
Nach einigen weiteren Schritten erhalten wir das linke unten stehende Bild.
23
Bis hierhin sind auch Kanten (1,3) und (2,4) aus dem Baum nach U verschoben worden. Beide Kanten sind mit maximalem Fluss (x13 = x24 = 3)
entfernt worden.
Ein Update müssen hier die Knoten 2 und 3 erhalten. Kante (1,2) wird neu
eingefügt und der Fluss kann um eine Einheit erhöht werden. Kante (5,4)
muss daraufhin entfernt werden.
Nach einem Update der Knoten 2,3 und 4 sind alle Optimalitätsbedingungen erfüllt. Da Optimalitätsbedingungen auf allen Kanten erfüllt ist und kein
Fluss auf künstlichen Kanten fließt, ist die Lösung optimal mit Flusskosten
von 26 Einheiten.
24
8
Strongly Feasible Spanning Tree
Es kann passieren, dass die Simplex-Methode nicht terminiert. Damit der
Algorithmus nicht in eine Endlosschleife gerät, wird hier das Konzept des
Strongly Feasible Spanning Tree mit einer Leaving Arc Rule vorgestellt, die
die Finitheit des Algorithmus garantiert.
Stellen wir uns nochmal den Spanning Tree (T, L, U ) als hängenden Baum
vor, dann gibt es Kanten, die nach oben zeigen (upward pointing) oder die
nach unten zeigen (downward pointing).
Definition 8.1.
Ein Spannbaum T ist strongly feasible, wenn jede Baumkante ohne Fluss
nach oben zeigt und jede Baumkante deren Fluss gleich ihrer Kapazität ist
nach unten zeigt.
Definition 8.2.
25
Ein Spannbaum ist strongly feasible, wenn es möglich ist, einen Fluss von
einem beliebigem Knoten zur Wurzel zu schicken, ohne Kapazitätsgrenzen zu
verletzen.
Bemerkung 10.
Man kann leicht zeigen, dass diese beiden Definitionen äquivalent sind.
Leider erhalten wir durch Konstruktion des initialen Spannbaums keinen
Strongly Feasible Spanning Tree. Dies kann jedoch erreicht werden, wenn die
Definition für eine Startlösung wie folgt geändert wird:
Wir untersuchen jeden Knoten j aus N (Orginalnetzwerk). Wenn b(j) ≥
0(statt b(j > 0)) , fügen wir eine Kante (j, r) (mit r als neuem künstlichem Knoten) ein, mit einem Fluss von b(j). Ist b(j) < 0(statt b(j) ≤ 0), so
fügen wir eine Kante (r, j) mit Fluss von −b(j) ein.
Jetzt ist leicht zu sehen, dass es möglich ist von jedem Knoten Fluss zur
Wurzel r zu schicken.
Da wir durch unsere Konstruktion des initialen Spannbaums immer einen
nicht-degenerativen Baum erhalten, haben wir auch automatisch zu Beginn
einen Strongly Feasible Spanning Tree. Jetzt gilt es, diese Eigenschaft im
Spanning Tree beizubehalten. Der Spannbaum kann im nächsten Schritt nur
degenerieren, wenn es mehr als eine blockierende Kante gibt, d.h. ist die
blockierende Kante eindeutig, so erhält man auch im nächsten Schritt einen
Strongly Feasible Spanning Tree. Damit dies auch im anderen Fall passiert,
gibt es folgende Regel.
8.1
Leaving Arc Rule
Aus dem Spannbaum soll die letzte blockierende Kante, die nach Traversierung (entlang der Orientierung der eingefügten Kante) des entstanden Krei26
ses entfernt werden. Dabei wird am Knoten w, der höchste Punkt (apex) des
Kreises im hängenden Baum, gestartet. Durch diese Regel wird der Kreis W
in W1 und W2 geteilt. W1 ist der Teil von W vom Knoten w bis zur Kante
(p, q) (entfernte Kante), W2 = W − W1 − {(p, q)}. Beide Teile haben die
gleiche Orientierung wie der Kreis W .
Satz 8.1.
a) Jeder Knoten im Segment W2 kann einen positiven Fluss zur Wurzel
schicken.
b) Jeder Knoten im Segment W1 kann einen positiven Fluss zur Wurzel
schicken.
Beweis.
a)
Da (p, q) die letzte blockierende Kante war, kann in W2 keine blockierende
Kante sein. Deshalb ist es auf jeden Fall möglich, dass jeder Knoten aus W2
noch Fluss zur Wurzel schicken kann.
b)
Fall 1:
Wenn die vorhergende Pivotoperation den Fluss entlang W1 erhöht hat und
damit eine nichtdegenerative Pivotoperation war, dann kann im nächsten
Schritt der Fluss auch wieder in die andere Richtung (zur Wurzel hin) geschickt werden.
Fall 2:
Wenn in der vergangenen Pivotoperation keine Flusserhöhung durchgeführt
wurde, muss W1 zwischen w und k liegen, da nach den Eigenschaft des Strongly Feasible Trees Fluss von l zur Wurzel geschickt werden kann. Und da der
27
Fluss ja auch nicht im Segment W1 erhöht wurde, kann auch positiver Fluss
von jedem Knoten in W1 zur Wurzel geschickt werden.
Die Finitheit resultiert jetzt daraus, dass mit jeder Flusserhöhung in den
Pivotoperationen der Zielfunktionswert vermindert wird. Das kann aber nur
endlich oft passieren, deswegen garantiert diese Methode die Finitheit des
Algorithmus.
Beispiel 8.1.
Abbildung 4: Strongly Feasible Spanning Tree
28
Literatur
[1] Ravindra K. Ahuja, James B. Orlin, Thomas L. Magnanti,
Network Flows: Theory, Algorithms & Applications,
Prentice Hall, 1993.
29