Bonusmaterial Vektorräume – Schau
Werbung

15
Bonusmaterial
Vektorräume – Schauplätze der linearen
Algebra
15.1
Endliche Körper
Wir haben Vektorräume nur für die beiden Körper K = R und
K = C definiert. Man überzeugt sich leicht, dass man Vektorräume auch über andere Körper, etwa über Q, den Körper
der rationalen Zahlen, definieren kann.
Es gibt viele weitere Körper. Erfahrungsgemäß bereiten diese weiteren Körper Studienanfängern Schwierigkeiten. Insbesondere gilt dies für die endlichen Körper, d. h. Körper, die
nur endlich viele Elemente enthalten. Aber tatsächlich spielen gerade diese endlichen Körper in vielen Anwendungen
der linearen Algebra eine entscheidende Rolle: Die Codierungstheorie etwa ist ohne endliche Körper nicht denkbar,
und moderne effiziente Verschlüsselungsverfahren, also Themen aus der Kryptologie, benutzen endliche Körper.
Es ist ein Ergebnis der (nichtlinearen) Algebra, dass es zu jeder Primzahlpotenz pn , d. h., p ist eine Primzahl und n eine
natürliche Zahl, bis auf die Bezeichnung der Elemente genau einen Körper gibt, der pn Elemente enthält, und weitere
endliche Körper gibt es nicht.
?
Gibt es einen Körper mit 6 oder 7 oder 8 Elementen?
Beispiel Es ist Z2 := {0, 1} mit den beiden wie folgt
definierten Verknüpfungen + und · ein endlicher Körper mit
2 Elementen:
+
0
1
Ein Körper ist durch ein Axiomensystem
definiert
0
0
1
1
1
0
und
·
0
1
0
0
0
1
0 .
1
Die Axiome (i)-(ix) sind einfach nachzuprüfen. Es übernimmt 0 die Rolle von 0 und 1 jene von 1.
Wir beginnen mit der Definition eines Körpers.
Weil jeder Körper nach dem Axiomensystem mindestens
zwei Elemente enthält, ist Z2 also ein kleinstmöglicher Kör
per.
Definition eines Körpers
Eine Menge K mit zwei (inneren) Verknüpfungen + und
· heißt Körper, wenn für alle a, b, c ∈ K die folgenden
Eigenschaften gelten:
(i) a + (b + c) = (a + b) + c,
(ii) Es gibt ein Element 0 mit a + 0 = a,
(iii) Zu a gibt es ein a mit a + a = 0,
(iv) a + b = b + a,
(v) a · (b + c) = (a · b) + (a · c),
(vi) a · (b · c) = (a · b) · c,
(vii) Es gibt ein Element 1 = 0 mit 1 · a = a.
(viii) Zu a = 0 gibt es ein a mit a · a = 1,
(ix) a · b = b · a.
Wir verallgemeinern diese Konstruktion, um zu jeder Primzahl p einen Körper Zp mit p Elementen zu erhalten.
Zu jeder Primzahl p gibt es einen Körper Zp
mit p Elementen
Ist p eine Primzahl, so definiert die Relation
a, b ∈ Z a ∼p b :⇔ ∃k ∈ Z : a − b = k p
Beispiel Es sind Q, R und C mit ihren jeweiligen bekannten Verknüpfungen + und · offenbar Körper, da sie die Axiome (i)-(ix) erfüllen.
Es gelten auch offenbar die Inklusionen Q ⊆ R ⊆ C.
Wir interessieren uns für kleine Körper, nämlich für Körper, die nur endlich viele Elemente enthalten. Solche Körper
nennt man endliche Körper, genauer: Ein Körper K heißt
endlich, wenn |K| = n ∈ N gilt.
eine Äquivalenzrelation auf Z (siehe Kapitel 2). Bezüglich
dieser Relation zerfällt also Z in seine disjunkten Äquivalenzklassen. Ist a ∈ Z, so setzen wir a = {b ∈ Z | a ∼p b}
für die Äquivalenzklasse von a. Für die Quotientenmenge
Z/ ∼p = {a | a ∈ Z} schreiben wir kürzer Zp .
2
15 Vektorräume – Schauplätze der linearen Algebra
Es gilt:
(∗)
Zp = {0, 1, . . . , p − 1} .
Ist nämlich b ∈ Z eine beliebige ganze Zahl, so können wir
diese durch p mit Rest teilen, also ganze Zahlen q und r
bestimmen, sodass
Also gilt a r ∼p 1, d. h. aber gerade a r = 1, also gilt auch
Axiom (viii).
Damit ist begründet, dass für jede Primzahl p die Menge Zp
mit den oben definierten Verknüpfungen einen Körper mit p
Elementen bildet.
b = q p + r mit 0 ≤ r < p
gilt (siehe das Kapitel zur elementaren Zahlentheorie auf der
Website). Es gilt dann aber b ∼p r, also b = r. Und weil r
zwischen 0 und p − 1 liegt, folgt die Gleichheit der beiden
Mengen in (∗).
Wir führen nun in dieser Menge Zp zwei Verknüpfungen +
und · ein, sodass diese Menge bezüglich dieser Verknüpfungen einen Körper bildet. So erhalten wir dann einen Körper
mit p Elementen.
Wir addieren bzw. multiplizieren zwei Elemente, also Äquivalenzklassen aus Zp , indem wir ihre Repräsentanten addieren bzw. multiplizieren:
?
Wählt man keine Primzahl, sondern eine zusammengesetzte
Zahl n = a b (a, b ∈ N \ {1}), so hat die Konstruktion auch
ihren Sinn. Ist die entstehende Struktur, also Zn ein Körper?
Beispiel Wir geben explizit die Verknüpfungstafeln für
die Additionen und Multiplikationen in Z3 an (für Z2 siehe
das obige Beispiel):
Es ist Z3 = {0, 1, 2} mit den beiden Operationen
+
0
1
2
a + b := a + b bzw. a · b := a · b .
Nun besteht eine kleine Hürde. Es ist nämlich eine offene
Frage, ob diese Verknüpfungen sinnvoll sind, da ja Repräsentanten nicht eindeutig bestimmt sind. Kann es denn nicht
sein, dass etwa diese Summe vom gewählten Repräsentanten abhängt? Ist wirklich gewährleistet, dass für verschiedene
a, a ∈ a auch stets a + b = a + b gilt? Dies ist tatsächlich
sowohl für die Summe wie auch für das Produkt der Fall,
man sagt: Die Verknüpfungen + und · sind wohldefiniert.
Wir begründen dies für die Addition, für die Multiplikation
geht man analog vor:
Es gelte also a = a und b = b . Zu zeigen ist: a+b = a +b .
Wegen a = a und b = b gibt es ganze Zahlen r, s mit
a = a + r p und b = b + s p .
Es folgt
a + b = a + b = a + b + (r + s) p = a + b = a + b ,
sodass also diese Addition wohldefiniert, also unabhängig
von den Repräsentanten ist.
Man kann für die Menge Zp mit den eben definierten Verknüpfungen + und · leicht die obigen Körperaxiome (i) (vii) und (ix) nachweisen. Dabei übernehmen 0 und 1 die
Rollen von 0 und 1. Das einzige Axiom, das nicht so leicht
nachzuweisen ist, ist das Axiom (viii) – es ist auch das einzige Axiom, für dessen Nachweis wir benutzen, dass p eine
Primzahl ist:
Ist 0 = a ∈ Zp gegeben, so gilt ggT(a, p) = 1, weil p
eine Primzahl ist. Mit dem Euklidischen Algorithmus (siehe
das Kapitel zur elementaren Zahlentheorie auf der Website)
findet man also ganze Zahlen r und s mit
ar + ps = 1.
0
0
1
2
1
1
2
0
2
2
0
1
·
0
1
2
und
0
0
0
0
1
0
1
2
2
0
2
1
Wir haben gezeigt, dass es zu jeder Primzahl p einen Körper mit p Elementen gibt. Es wurde bereits erwähnt, dass es
zu jeder Primzahlpotenz p n mit n ∈ N einen Körper mit p n
Elementen gibt. Einen solchen kann man mithilfe eines sogenannten irreduziblen Polynoms vom Grad n über Zp konstruieren. Wir verweisen hierzu auf gängige Algebralehrbücher,
etwa S. Bosch: Algebra. Springer, 1993.
Relativ einfach aber ist die Konstruktion eines Körpers mit
4 = 22 Elementen:
Beispiel Gegeben ist eine Menge K := {0, 1, a, b} mit
vier (verschiedenen) Elementen. Wir füllen die Additionsund Multiplikationstafeln
+
0
1
a
b
0
1
a
b
·
0
1
a
b
0
1
a
b
unter der Annahme aus, dass die Menge K mit den Verknüpfungen + und · ein Körper (mit dem neutralen Element 0
bezüglich + und dem neutralen Element 1 bezüglich ·) ist.
Wir werden sehen, dass es nur eine Möglichkeit gibt. Und
zwar gilt:
+
0
1
a
b
0
0
1
a
b
1
1
0
b
a
a
a
b
0
1
b
b
a
1
0
·
0
1
a
b
0
0
0
0
0
1
0
1
a
b
a
0
a
b
1
b
0
b
1
a
Wir begründen dies und beginnen mit der Tafel für die Multiplikation.
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
15.2 Vektorräume und Untervektorräume
Es gilt a · b ∈ K \ {0}. Aus a · b = a folgte b = 1 (das kann
also nicht sein). Aus a · b = b folgte a = 1 (das kann also
auch nicht sein): Es muss also a · b = 1 gelten.
Die Begriffe Untervektorräume, lineare Unabhängigkeit, Erzeugendensystem, Basis, Dimension, ... gelten analog für beliebiges K.
Damit kann aber nicht a · a = 1 gelten (das Inverse zu a ist
ja eindeutig bestimmt), und weil aus a · a = a die Gleichung
a = 1 folgte, muss a · a = b gelten.
Beispiel Es seien K ein Körper und KK der K–Vektorraum
der Abbildungen von K nach K. Für i ∈ N0 sei pi ∈ KK
definiert durch
K→K
.
pi :
x → x i
Weiter muss auch b · a = 1 gelten. Es bleibt noch b · b zu
bestimmen. Das ist nun aber klar: b · b = 1 und b · b = b
sind ausgeschlossen, es muss also b · b = a gelten.
Damit ist die Multiplikationstafel bereits festgelegt. Wir wenden uns nun der Additionstafel zu.
Es gilt 1 + a ∈ {0, b} und 1 + b ∈ {0, a} (man kann ja
subtrahieren).
Annahme: 1 + a = 0. Dann muss 1 + b = a gelten (Eindeutigkeit von Inversen). Es folgt dann:
K = Z2 , K = Z3 bzw. K = Q .
Es sei U := p0 , p 1 , p 2 , p 3 .
K = Z2 : Wegen p 1 (0̄) = p 2 (0̄) = p 3 (0̄) = 0̄ und p 1 (1̄) =
p2 (1̄) = p3 (1̄) = 1̄ gilt
b = a · a = a · (1 + b) = a + a · b = a + 1.
p1 = p2 = p3
Und das ist ein Widerspruch.
Damit ist gezeigt: 1 + a = b. Ebenso gilt (vertausche die
Rollen von a und b) 1 + b = a.
Es folgt weiter: 1+1 = 0 (ein Inverses zu 1 muss es ja geben),
und damit gilt auch a + a = a · (1 + 1) = 0 = b · (1 + 1) =
b + b.
Damit liegt die Tafel für die Addition fest.
Wir bestimmen jeweils die Dimension des von
{p0 , p 1 , p 2 , p 3 } aufgespannten Untervektorraums von KK
für die Fälle
und somit p0 , p 1 = p0 , p 1 , p 2 , p 3 = U .
Wir zeigen nun noch, dass {p0 , p 1 } linear unabhängig ist.
Es seien a0 , a1 ∈ Z2 mit a0 p 0 + a1 p 1 = 0 ∈ KK , also
a0 p0 (x) + a1 p1 (x) = 0̄ für alle x ∈ Z2 . Einsetzen von
x = 0̄ liefert a0 = 0̄ und dann Einsetzen von x = 1̄ auch
a1 = 0̄. Also ist {p0 , p 1 } linear unabhängig, also eine Basis
von U , also dim(U ) = 2.
K = Z3 : Analog zu K = Z2 sieht man, dass {p 0 , p 1 , p 2 }
eine Basis von U ist, also dim(U ) = 3.
15.2
Vektorräume und
Untervektorräume
Völlig analog zum Fall K = R oder K = C können wir
Vektorräume über einem beliebigen Körper K erklären:
Definition eines Vektorraumes
Eine nichtleere Menge V mit zwei Verknüpfungen +
und · (Addition von Elementen aus V und Multiplikation von Elementen aus V mit Elementen aus K) heißt ein
Vektorraum über K oder kurz K-Vektorraum, wenn
für alle u, v, w ∈ V und λ, μ ∈ K die folgenden Vektorraumaxiome gelten:
(V1) v + w ∈ V und λ v ∈ V (Abgeschlossenheit).
(V2) (u + v) + w = u + (v + w) (Assoziativität).
(V3) Es gibt ein Element 0 ∈ V mit v +0 = v (Existenz
eines neutralen Elementes).
(V4) Es gibt ein v ∈ V mit v + v = 0 (Existenz eines
entgegengesetzten Elementes).
(V5) v + w = w + v (Kommutativität).
(V6) λ (v + w) = λ v + λ w.
(V7) (λ + μ) v = λ v + μ w.
(V8) (λ μ) v = λ (μ v).
(V9) 1 v = v.
K = Q: Offensichtlich ist p 0 , p 1 , p 2 , p 3 = U . Wir zeigen, dass {p0 , p 1 , p 2 , p 3 } linear unabhängig ist.
Es seien a0 , a1 , a2 , a3 ∈ Q mit a0 p 0 + a1 p1 + a2 p 2 +
a3 p 3 = 0 ∈ KK , also a0 p 0 (x) + a1 p1 (x) + a2 p 2 (x) +
a3 p 3 (x) = 0 für alle x ∈ Q. Einsetzen von x = 0, x =
1, x = −1, x = 2 liefert a0 = 0 und dass (a1 , a2 , a3 )
eine Lösung des homogenen linearen Gleichungssystems mit
Koeffizientenmatrix
⎛
⎞
51 1
1
⎝ −1 1 −1 ⎠
2 4
8
ist. Mit dem Gauß-Algorithmus sieht man, dass dieses System nur die Lösung (0, 0, 0) besitzt. Also ist
{p 0 , p 1 , p 2 , p 3 } linear unabhängig, also eine Basis und so
mit dim(U ) = 4.
Anwendungsbeispiel
Der Bauer-Code
Ein vereinfachtes Kommunikationssystem lässt sich vereinfacht darstellen als:
Nachrichtenquelle
Codierung
−→
Kanal
Decodierung
−→
Empfänger
Die Nachrichtenquelle gibt eine Folge von Bits 0 oder 1 in
den Kanal ein.
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
3
4
15 Vektorräume – Schauplätze der linearen Algebra
Der Kanal ist gestört, d. h., hin und wieder wird ein Bit als das
entgegengesetzte Bit vom Kanal an den Empfänger weitergereicht. Um diese Störung zu bekämpfen, schalten wir vor
bzw. hinter den Kanal einen Codierer bzw. einen Decodierer.
Der Codierer fasst je k (zum Beispiel k = 4) von der Nachrichtenquelle ausgegebene Bits zu einem Informationsblock
zusammen. Sodann berechnet der Codierer in Abhängigkeit
vom Informationsblock r (im Beispiel r = 4) Kontrollbits,
fasst diese zu einem Kontrollblock zusammen und sendet
das Codewort, das ist das Paar (Informationsblock, Kontrollblock), an den Kanal.
Die Zuordnung Informationsblock → Codewort heißt Codierung. Der Kanal gibt nach Eingabe des Codewortes ein
Kanalwort der Länge k + r aus. Als Kanalwort kann prinzipiell jedes der 2k+r möglichen Bit-Wörter der Länge k + r
auftreten (im Beispiel also jedes der 256 Bytes). Die Kanalstörungen können ja jedes Bit verfälschen; wir gehen allerdings davon aus, dass die Bit-Störungen sehr selten und
unabhängig voneinander auftreten.
Der Decodierer versucht, aus der Kenntnis des Kanalwortes
das ursprünglich gesendete Codewort zu rekonstruieren; die
ersten k Bits des geschätzten Codewortes reicht der Decodierer als seine Mutmaßung des tatsächlich von der Nachrichtenquelle ausgegebenen Informationsblockes an den Empfänger
weiter.
= |{i | xi + yi = 0}| = w(x + y) und schließlich
d(C) = min{d(x, y) | x, y ∈ C, x = y}
= min{w(x + y) | x, y ∈ C, x = y}
= min{w(z) | z ∈ C, z = 0} = w(C) .
Der Bauer-Code B besteht aus allen Elementen x =
x1 x2 x3 x4 x5 x6 x7 x8 ∈ Z82 , die der folgenden Bedingung genügen:
x 5 x6 x7 x8 =
x1 x2 x3 x4 ,
falls w(x1 x2 x3 x4 ) ∈ 2 N0 ,
=
x1 x2 x3 x4 + 1111, falls w(x1 x2 x3 x4 ) ∈ 2 N0 + 1;
z. B. sind 00000000, 01001011, 01100110 Codewörter.
Wir geben alle Elemente von B explizit an und zeigen, dass
B ein linearer Code ist:
Da x1 x2 x3 x4 ∈ Z42 beliebig gewählt werden kann, gilt |B| =
16. Die Elemente von B sind:
10110100
11010010
11100001
11111111
10101010
10011001
01100110
01010101
00110011
01111000
00000000
10000111
01001011
00101101
00011110
11001100
Der Bauer-Code ist ein sogenannter 1-fehlerkorrigierender
und 2-fehlererkennender Code (k = 4 und r = 4), d. h. ein
geeigneter Decodierer kann die von höchstens einem BitFehler betroffenen Codewörter richtig schätzen und bei zwei
Bit-Fehler in einem Codewort erkennen, dass eine Störung
vorliegt. Einen solchen geeigneten Decodierer stellen wir im
Bonusmaterial zum Kapitel 18 vor; hier beschreiben wir nur
die Codierung.
Zum Beweis der Tatsache, dass B ein Z2 -Vektorraum ist,
nutzen wir aus, dass eine Teilmenge C ⊆ Zn2 genau dann
ein linearer Code ist, wenn 0 ∈ C und aus x, y ∈ C stets
x + y ∈ C folgt.
Ein (binärer) linearer Code der Länge n ist ein Untervektorraum C von Zn2 mit |C| ≥ 2, wobei Z2 = {0, 1} der Körper
mit 2 Elementen ist. Es sei nun C ein solcher linearer Code der Länge n. Für die Elemente x = (x1 , . . . , xn ) ∈ C
schreiben wir kürzer x = x1 . . . xn .
Wir schreiben die Elemente aus B in der Form (a, a ∗ ) mit
a ∈ Z42 und
a,
falls w(a) ∈ 2 N0 ,
∗
a =
a + 1, falls w(a) ∈ 2 N0 ,
Der Hamming-Abstand d(x, y) zweier Codewörter
x, y ∈ C ist die Anzahl der Positionen, in denen sich x
und y unterscheiden, d. h.
wobei wir zur Abkürzung 1 = 11 . . . 1 geschrieben haben.
Es gilt (a, a ∗ ) + (b, b∗ ) = (a + b, a ∗ + b∗ ). Das einzige
Codewort, das hierfür infrage kommt, ist a + b, (a + b)∗ .
Also ist B genau dann ein linearer Code, wenn (a + b)∗ =
a ∗ + b∗ für alle a, b ∈ Z42 .
d(x, y) = |{j | 1 ≤ j ≤ n und xj = yj }|.
Das Hamming-Gewicht w(x) von x ∈ C ist die Anzahl der
Einsen in x, also w(x) = d(x, 0), wobei 0 = 00 . . . 0 ∈ Zn2
das Nullwort ist. Für jeden Code C ⊆ Zn2 mit |C| ≥ 2 heißen
die Zahlen
d(C) = min{d(x, y) | x, y ∈ C, x = y} bzw.
w(C) = min{w(x) | x ∈ C, x = 0}
der Minimalabstand bzw. das Minimalgewicht von C.
Für x, y ∈ C ist stets auch x + y ∈ C, und x + y = 0
impliziert x = −y = y. Somit gilt d(x, y) = |{i | xi = yi }|
Unter Beachtung von 1 + 1 = 0 in Z2 bestätigt man die
Formel: w(a + b) ∈ 2 N0 ⇔ w(a) + w(b) ∈ 2 N0 . Hiermit
=
erhalten wir die Tabelle (für ein c ∈ Z42 schreiben wir w(c)
0 im Fall w(c) ∈ 2 N0 und w(c) = 1 im Fall w(c) ∈ 2 N0+1):
w(a)
w(b)
w(a
+ b)
a∗
b∗
(a + b)∗
0
1
0
1
0
0
1
1
0
1
1
0
a
a+1
a
a+1
b
b
b+1
b+1
a+b
a+b+1
a+b+1
a+b
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
15.2 Vektorräume und Untervektorräume
Mit 1+1 = 0 erhalten wir in allen Fällen (a +b)∗ = a ∗ +b∗ .
Der Bauer-Code B ist also ein linearer Code. Damit können wir obige Formel anwenden, um d(B) zu bestimmen.
Wir erhalten d(C) = w(C) = 4, denn außer 00 . . . 0,
11 . . . 1 haben ja alle Codewörter aus B das Hamming-Ge
wicht 4.
Summen von Untervektorräumen sind wieder
Untervektorräume
Für zwei Untervektorräume U und W eines K-Vektorraumes
V definiert man
U + W := {u + w | u ∈ U, w ∈ W }
und nennt U + W die Summe der Untervektorräume U
und W .
Offenbar ist U + W wieder ein Untervektorraum von V , dies
folgt auch aus einer späteren Betrachtung einer Erzeugendenmenge von U + W .
?
Wieso ist U + W ein Untervektorraum?
Man nennt U + W die Summe der Untervektorräume U und
W.
Wir betrachten nun Erzeugendensysteme von U und W . Dabei soll MU ein solches von U und MW ein solches von W
sein, d. h.
U = MU und W = MW .
Gegeben seien u ∈ U und w ∈ W . Da MU aus allen
Linearkombinationen von Elementen aus MU besteht, existieren
r ∈ N0 , u1 , . . . , ur ∈ MU und
sλ1 , . . . , λr ∈ K mit
r
λ
u
.
Ebenso
ist
w
=
u =
i
i
i=1
i=1 μi w i mit einem
s ∈ N0 , w i ∈ MW und μi ∈ K für 1 ≤ i ≤ s. Folglich ist
u+w =
r
λi ui +
i=1
s
μi w i
i=1
Damit haben wir also
U + W = MU + MW = MU ∪ MW begründet. Aus der Darstellung U + W = MU ∪ MW folgt
natürlich insbesondere, dass U + W ein Teilraum von V ist.
Nach der Definition der linearen Hülle ist U ∪ W der kleinste Untervektorraum von V , der U und W enthält. Da U und
W Teilräume von V sind, gilt U = U , W = W . Also ist
U + W der kleinste Untervektorraum von V , der U und W
enthält.
?
Wenn MU und MW sogar Basen von U und W sind, ist dann
MU ∪ MW eine solche von U + W ?
Beispiel Wir bestimmen jeweils eine Basis von U , W und
U + W für
⎛
⎞
1
⎜−1⎟
⎜ ⎟
⎟
U =R⎜
⎜ 0 ⎟+R
⎝0⎠
0
⎛ ⎞
2
⎜1⎟
⎜ ⎟
⎟
W =R⎜
⎜−1⎟ + R
⎝−2⎠
0
⎛
⎞
0
⎜1⎟
⎜ ⎟
⎜−1⎟ + R
⎜ ⎟
⎝0⎠
0
⎛ ⎞
−2
⎜1⎟
⎜ ⎟
⎜ 3 ⎟+R
⎜ ⎟
⎝6⎠
−8
⎛
⎞
1
⎜1⎟
⎜ ⎟
⎜ 0 ⎟ und
⎜ ⎟
⎝0⎠
−2
⎛ ⎞
1
⎜−1⎟
⎜ ⎟
⎜−2⎟ .
⎜ ⎟
⎝−4⎠
6
Wir bezeichnen die angegeben Vektoren aus U der Reihe
nach mit u1 , u2 , u3 und jene aus W mit w 1 , w 2 , w 3 .
Die Schreibweise U = R u1 +R u2 +R u3 bedeutet nichts anderes als U = u1 , u2 , u3 . Wir zeigen, dass u1 , u2 , u3 linear unabhängig sind. Die Gleichung λ1 v 1+λ2 v 2+λ3 v 3 = 0
mit λ1 , λ2 , λ3 ∈ R führt zu einem linearen Gleichungssystem mit der erweiterten Koeffizientenmatrix
⎛
eine Linearkombination von u1 , . . . , ur , w 1 , . . . , ws ∈
MU ∪ MW . Es gilt also U + W ⊂ MU ∪ MW .
Nun sei umgekehrt v = ti=1 λi v i eine Linearkombination
von Elementen v i ∈ MU ∪ MW . Wir setzen
⎜
⎜
⎜
⎜
⎝
1
−1
0
0
0
0
1
−1
0
0
1
1
0
0
−2
0
0
0
0
0
⎞
⎟
⎟
⎟,
⎟
⎠
I := {i ∈ 1, t | v i ∈ MU } und J := 1, t \ I ,
wobei zur Abkürzung 1, t := {1, 2, . . . , t} geschrieben
/ MU , d. h. v i ∈ MW . Folglich
wird. Für i ∈ J gilt v i ∈
ist
u=
t
i=1
λi v i =
λi v i +
i∈I
∈MU λi v i ∈ U + W.
i∈J
∈MW dessen einzige Lösung offenbar (0, 0, 0) ist. Demnach ist
{u1 , u2 , u3 } ein linear unabhängiges Erzeugendensystem,
also eine Basis von U .
Nun untersuchen wir die Vektoren w 1 , w 2 , w 3 auf lineare
Unabhängigkeit. Offenbar sind w1 , w 2 linear unabhängig,
denn aus λ1 w1 + λ2 w2 = 0 mit – sagen wir – λ2 = 0
folgt w 2 = (−λ1 /λ2 ) w1 , d. h. w2 wäre skalares Vielfaches
von w1 , was offensichtlich nicht der Fall ist. Wir müssen
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
5
6
15 Vektorräume – Schauplätze der linearen Algebra
Vertiefung: Die Anzahl der k-dimensionalen Untervektorräume von Znp
Gegeben seien n ∈ N0 sowie eine Primzahl p ∈ N. Wir wollen die Anzahl der k-dimensionalen (verschiedenen) Untervektorräume von Znp bestimmen.
Wir betrachten den Zp -Vektorraum Znp :
⎫
⎧⎛ ⎞
⎪
⎪
⎬
⎨ a1
⎜.⎟
Znp = ⎝ .. ⎠ | a1 , . . . , an ∈ Zp .
⎪
⎪
⎭
⎩
an
Für jede Komponente hat man p Möglichkeiten, ein Element aus Zp zu wählen, so dass also Znp insgesamt pn
Elemente enthält.
Es ist {0} der einzige Untervektorraum der Dimension 0.
Zur Anzahl der 1-dimensionalen Untervektorräume: Es
gibt p n −1 Möglichkeiten, einen vom Nullvektor verschiedenen Vektor zu wählen, und jeder solche Vektor erzeugt
einen 1-dimensionalen Untervektorraum. Nun sind aber
diese Untervektorräume
nicht alle verschieden, so gilt im
⎛ ⎞
⎛ ⎞
1
2
Z33 etwa ⎝1⎠ = ⎝2⎠. Wir überlegen uns, wie vie0
0
le verschiedene Basen ein 1-dimensionaler Untervektorraum von Znp haben kann. Ist U ein 1-dimensionaler Untervektorraum, so liefert jede Wahl eines vom Nullvektor
verschiedenen Vektors aus U (das sind p − 1 Möglichkeiten) eine Basis für U . Also erzeugen je p − 1 = |Zp \ {0}|
Elemente den gleichen Untervektorraum. Wir erhalten: Es
n −1
verschiedene 1-dimensionale Untervekgibt genau pp−1
torräume von Znp .
Zur Anzahl der 2-dimensionalen Untervektorräume: Es
gibt pn − 1 Möglichkeiten, einen vom Nullvektor ver-
dann prüfen, ob w 3 ∈ w 1 , w 2 , d. h. w 3 = λ1 w1 + λ2 w2
lösbar ist. Ausgeschrieben liefert dies das lineare Gleichungssystem
⎞
⎛
2 −2 1
⎜ 1
1 −1 ⎟
⎟
⎜
⎜ −1 3 −2 ⎟
⎟
⎜
⎝ −2 6 −4 ⎠
0 −8 6
Dieses Gleichungssystem ist lösbar mit Lösung λ1 = −1/4,
λ2 = −3/4. Es folgt W = w1 , w 2 , und {w1 , w 2 }
ist als linear unabhängiges Erzeugendensystem eine Basis
von W .
Nun wissen wir, dass U + W = {u1 , u2 , u3 , w 1 , w 2 }.
Der Vektor w 1 kann nicht Linearkombination von v 1 , v 2 , v 3
sein – man beachte die vierten Komponenten. Also sind
u1 , u2 , u3 , w 1 linear unabhängig. Wegen w2 = 4 u3 −3 w1
gilt U + W = {u1 , u2 , u3 , w1 }, d. h. {u1 , u2 , u3 , w 1 } ist
eine Basis von U + W .
schiedenen Vektor a 1 zu wählen und p n − p Möglichkeiten einen zum Vektor a 1 linear unabhängigen Vektor a 2 ∈ Znp \ a 1 zu wählen. Jedes solche Paar von
Vektoren a 1 und a 2 erzeugt einen 2-dimensionalen Untervektorraum. Diese Untervektorräume⎛sind
⎞ aber
⎛ ⎞nicht
1
0
alle verschieden. So gilt im Z33 etwa ⎝1⎠ , ⎝2⎠ =
0
0
⎛ ⎞⎛ ⎞
2
0
⎝2⎠ ⎝2⎠. Wir überlegen uns, wie viele verschiede0
0
ne Basen ein 2-dimensionaler Untervektorraum von Znp
haben kann. Jede Wahl eines vom Nullvektor verschiedenen Vektors b1 (das sind p 2 − 1 Möglichkeiten) und
eines von b1 linear unabhängigen Vektors aus U \ b1 (das sind p2 − p Möglichkeiten) liefert eine Basis von U :
Es gibt also (p 2 − 1) (p2 − p) verschiedene Basen in U .
n −1) (p n −p)
verschiedene
Wir erhalten: Es gibt genau (p
(p 2 −1) (p2 −p)
2-dimensionale Untervektorräume von Znp .
Die Überlegungen wiederholen sich für die 3dimensionalen Untervektorräume. Und allgemein erhalten
wir für die Anzahl der k-dimensionalen Untervektorräume
von Znp die Formel: Es gibt genau
k−1
j =0
pn − pj
(p n − 1)(p n − p) · · · (p n − p k−1 )
= k
k
j
p −p
(p − 1)(p k − p) · · · (p k − p k−1 )
k-dimensionale Untervektorräume von Znp .
Durchschnitte von Untervektorräumen sind
wieder Untervektorräume
Für zwei Untervektorräume U und W eines K-Vektorraumes
V ist U ∩ W wieder ein Untervektorraum von V . Der Nachweis ist sehr einfach: Weil der Nullvektor sowohl in U als
auch in W liegt, ist U ∩ W nicht leer. Weiterhin ist mit jedem
λ ∈ K und v ∈ U ∩ W auch λ v ein Element aus U und
zugleich ein Element aus W , also wieder ein Element aus
U ∩ W . Und mit zwei Elementen v und v aus U ∩ W liegt
auch deren Summe sowohl in U als auch in W , also wieder
in deren Durchschnitt.
Achtung: Ist MU ein Erzeugendensystem von U und MW
ein solches von W , so gilt im Allgemeinen
U ∩ W = MU ∩ MW = MU ∩ MW .
Man wähle etwa MU = {1} und MW = {2} im eindimensionalen R-Vektorraum R.
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
15.2 Vektorräume und Untervektorräume
Beispiel Im R–Vektorraum V = R3 seien zwei Untervektorräume U und W gegeben durch
⎛1⎞ ⎛ 0 ⎞
⎛ 1 ⎞ ⎛0⎞
U = ⎝0⎠ , ⎝ 1 ⎠ und W = ⎝ 0 ⎠ , ⎝1⎠ .
1
−1
−1
1
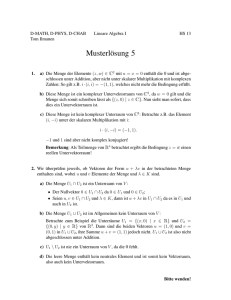
Achtung: Die Vereinigung von Untervektorräumen ist im
Allgemeinen kein Untervektorraum. Als Beispiel wähle man
etwa zwei verschiedene eindimensionale Untervektorräume
des R2 .
x2
Wir bestimmen U ∩ W .
U2
∈ U1 ∪ U 2
x3
x1
U1
Abbildung A15.2 Die Summe der zwei Vektoren aus U1 ∪ U2 ist nicht Element
von U1 ∪ U2 , also ist U1 ∪ U2 kein Vektorraum.
x1
x2
Abbildung A15.1 Der Schnitt der beiden Untervektorräume U und W ist eine
Gerade.
⎛ ⎞
⎛ ⎞
1
0
Für v = λ1 ⎝0⎠ +λ2 ⎝ 1 ⎠ mit λ1 , λ2 ∈ R gilt v ∈ U ∩W
1
−1
genau dann, wenn es μ1 , μ2 ∈ R gibt, so dass
⎛ ⎞
⎛ ⎞
⎛ ⎞
⎛ ⎞
1
0
1
0
λ1 ⎝0⎠ + λ2 ⎝ 1 ⎠ = μ1 ⎝ 0 ⎠ + μ2 ⎝1⎠
1
−1
−1
1
gilt. Wir bestimmen daher die Lösungsmenge L des homogenen linearen Gleichungssystems über R mit der folgenden
erweiterten Koeffizientenmatrix:
⎛
⎞
1
0 −1
0 0
⎝ 0
1
0 −1 0 ⎠ .
1 −1
1 −1 0
Man beachte den Unterschied zwischen der Summe und der
Vereinigung von Untervektorräumen.
Es gibt einen Vektorraum mit acht Elementen
Bekanntlich bildet die Menge aller Abbildungen von einer
nichtleeren Menge M in einen Körper K, also KM mit den
Verknüpfungen
f + g : x → f (x) + g(x) und λ f : x → λ f (x)
einen K-Vektorraum. Dabei darf K natürlich auch ein endlicher Körper sein. Wir geben ein Beispiel an.
Beispiel Wir betrachten eine dreielementige Menge M =
{x, y, z} und den Körper K := Z2 = {0, 1} mit zwei Elementen. Es ist dann die Menge KM aller Abbildungen von
M nach K eine Menge mit 23 = 8 Elementen. Wir geben die
Elemente von KM explizit an:
f1 : x → 0, y → 0, z → 0
Mittels elementarer Zeilenumformungen wird diese Matrix
überführt in
⎞
⎛
1 0 0 −1 0
⎝ 0 1 0 −1 0 ⎠ .
0 0 1 −1 0
Also gilt L = {(λ, λ, λ, λ) | λ ∈ R} und somit U ∩ W =
⎫
⎧ ⎛ ⎞
⎫
⎧ ⎛ ⎞
⎛ ⎞
1
1
0
⎬
⎨
⎬
⎨
=
λ ⎝1⎠ | λ ∈ R .
λ ⎝0⎠ + λ ⎝ 1 ⎠ | λ ∈ R
⎭
⎩
⎭
⎩
0
1
−1
Also
⎛1⎞
U ∩ W = ⎝1⎠ .
0
f2 : x → 0, y → 0, z → 1
f3 : x → 0, y → 1, z → 1
f4 : x → 1, y → 1, z → 1
f5 : x → 1, y → 0, z → 0
f6 : x → 1, y → 1, z → 0
f7 : x → 1, y → 0, z → 1
f8 : x → 0, y → 1, z → 0
Der eindeutig bestimmte Nullvektor ist f1 und jedes Element
ist zu sich selbst invers, da für jedes i ∈ {1, . . . , 8} jeweils
fi + fi = f1 gilt. Wir bestimmen weiter die Summe f2 + f3 :
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
7
8
15 Vektorräume – Schauplätze der linearen Algebra
Vertiefung: Fastvektorräume – Gegenbeispiele, denen dies nicht sofort anzusehen ist
Es gibt Beispiele von Mengen mit Verknüpfungen, bei denen nur fast alle Vektorraumaxiome erfüllt sind. Wir führen vier
Beispiele an, bei denen jeweils eines der sogenannten Verträglichkeitsaxiome (V6), (V7), (V8), (V9) zwischen der skalaren
Multiplikation und der Addition nicht erfüllt ist. Man beachte, dass wir im Folgenden bei der üblichen Multiplikation · in R bzw.
C keinen Multiplikationspunkt setzen. Die Multiplikationspunkte sind für die definierten skalaren Multiplikationen reserviert.
(1) In K = C und V = C2 bezeichne + die komponentenweise Addition; als skalare
Multiplikation definieren
v
wir für λ ∈ C und v = 1 ∈ V :
v2
⎧
⎪
λ
v
⎪
1
⎪
⎪
⎨ λ v , falls v2 = 0
v1
2
:= λ·
v2
⎪
λ v1
⎪
⎪
⎪
⎩ 0 , falls v2 = 0
1
1
∈V
,w =
Wir wählen λ = i ∈ C, v =
−1
1
und rechnen nach,
1
1
2
−2 i
λ · (v + w) = i ·
+
= i·
=
1
−1
0
0
sowie
1
i
i
2i
1
+i·
=
+
=
.
1
−1
i
−i
0
λ·v+λ·w = i·
Also ist das Vektorraumaxiom (V6) verletzt.
Es gelten jedoch alle anderen Vektorraumaxiome.
Ex v1
emplarisch weisen wir (V9) nach: Für alle v =
∈
v2
V gilt:
1 v1
v
=v
1·v =1· 1 =
v2
1 v2
(2) In K = R und V = R bezeichne + die übliche Addition
komplexer Zahlen; als skalare Multiplikation definieren wir für λ ∈ R und v ∈ V
Das gemischte Assoziativgesetz (V8) gilt hier nicht:
Z. B. ist
(i2 ) · v = (−1) · v = Re (−1) v = −v ,
aber
i · (i · v) = Re (i) Re (i) v = 0 ,
d. h. (i2 ) · v = i · (i · v), sofern v = 0. Die anderen Vektorraumaxiome sind erfüllt. Exemplarisch zeigen wir,
dass (V7) erfüllt ist: Für alle λ, μ ∈ C und v ∈ V gilt
(λ + μ) · v = Re (λ + μ) · v = (Re λ + Re μ) v
= Re λ v + Re μ v = λ · v + μ · v .
(4) In K = R und V = R2 bezeichne + die komponentenweise Addition; als skalare
Multiplikation definieren
v
wir für λ ∈ R und v = 1 ∈ V
v2
λ·
Für λ = 1, v2 = 0 ergibt sich
v
v
v
1 · 1 = 1 = 1 ,
v2
0
v2
also gilt hier das Axiom (V9) nicht. Alle anderen Axiome gelten. Exemplarisch
wir
(V6) nach. Für alle
weisen
w1
v1
,w=
∈ V gilt:
λ ∈ R und v =
v2
w2
λ · v := λ2 v .
Das Axiom (V7) (λ + μ) · v = λ · v + μ · v ist verletzt:
Z. B. ist
v1
λ v1
.
:=
v2
0
λ · (v + w) =
λ (v1 + w1 )
λ w1
λ v1
+
=
0
0
0
=λ·v+λ·w
(1 + 1) · v = 2 · v = 4 v = 2 v = v + v = 1 · v + 1 · v ,
sofern v = 0. Es sind jedoch alle anderen Vektorraumaxiome erfüllt. Exemplarisch zeigen wir, dass (V8) erfüllt ist: Für alle λ, μ ∈ R und v ∈ V gilt
(λ μ) · v = (λ μ)2 · v = λ2 (μ2 · v) = λ · (μ · v) .
(3) In K = C und V = C bezeichne + die übliche Addition
komplexer Zahlen; als skalare Multiplikation definieren wir für λ ∈ C und v ∈ V
λ · v := (Re λ) v .
Kommentar: Wir haben für jedes der vier Axiome der
Skalarmultiplikation eine algebraische Struktur angegeben, in der dieses Axiom verletzt und alle anderen Vektorraumaxiome erfüllt sind. Demnach folgt keines der vier
Axiome der Skalarmultiplikation aus den übrigen Axiomen. Man sagt: Die Axiome der Skalarmultiplikation sind
voneinander unabhängig. Dies ist nicht so bei der Kommutativität (V5): Die Kommutativität der Addition folgt
tatsächlich aus den anderen Vektorraumaxiomen. Wir stellen diesen Nachweis als Übungsaufgabe.
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
15.2 Vektorräume und Untervektorräume
Achtung: Man achte wieder auf die grundsätzlich verschiedenen Bedeutungen der Additionen, die wir mit ein und
demselben +-Zeichen versehen. Man unterscheide genau: Es
ist f ∈ KM und f (x) ∈ K.
Wegen
(f2 + f3 )(x) = f2 (x) + f3 (x) = 0 + 0 = 0 ,
(f2 + f3 )(y) = f2 (y) + f3 (y) = 0 + 1 = 1 ,
(f2 + f3 )(z) = f2 (z) + f3 (z) = 1 + 1 = 0
gilt also f2 + f3 = f8 .
Antworten der Selbstfragen
S. 1
Es gibt keinen Körper mit 6 Elementen, da 6 = 2 · 3 keine Primzahlpotenz ist. Es gibt hingegen Körper mit 7 = 71
und 8 = 23 Elementen, da diese Zahlen Primzahlpotenzen
sind.
S. 5
Es ist U + W nicht leer, weil der Nullvektor 0 in U + W liegt.
Weiter liegen mit zwei Elementen u + w, u + w ∈ U und
λ ∈ K stets auch u + w + u + w = (u + u ) + (w + w )
und λ (u + w) = λ u + λ w wieder in U .
S. 2
Nein, da a · b = 0 gilt, obwohl keiner der Faktoren 0
ist.
S. 5
Nein, man wähle etwa zwei verschiedene Basen MU und MW
eines Vektorraumes U = W .
Arens et al., Mathematik, ISBN: 978-3-8274-1758-9, © Spektrum Akademischer Verlag, 2008
9