Vorlesungsskriptum Regelung nichtlinearer mechatronischer
Werbung

Vorlesungsskriptum
Regelung nichtlinearer mechatronischer Systeme 2
Kurt Schlacher
Institut für Regelungstechnik und Prozessautomatisierung
Johannes Kepler Universität Linz
WS 2016/2017
Inhaltsverzeichnis
1 Mathematische Grundlagen
1.1 Geometrische Methoden . . . . . . . . . . . . . .
1.2 Der Zustandsraum autonomer Systeme . . . . . .
1.3 AI-Systeme . . . . . . . . . . . . . . . . . . . . .
1.4 Beispiele zu AI Systemen . . . . . . . . . . . . . .
1.4.1 Einfache mechanische Systeme . . . . . . .
1.4.2 Die Kurzschlussläufer Asynchronmaschine
1.5 Abstrakte Mannigfaltigkeiten . . . . . . . . . . .
1.6 Bündel . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1 Das Tangential- und Kotangentialbündel .
1.6.2 Freie und autonome Systeme . . . . . . . .
1.6.3 Systeme mit Eingang . . . . . . . . . . . .
1.7 Transformationen . . . . . . . . . . . . . . . . . .
1.8 Schlussbemerkungen . . . . . . . . . . . . . . . .
1.9 Aufgaben . . . . . . . . . . . . . . . . . . . . . .
1.9.1 AI-Systeme . . . . . . . . . . . . . . . . .
1.9.2 Mannigfaltigkeiten . . . . . . . . . . . . .
1.9.3 Bündel . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
2
4
5
7
7
8
11
19
22
27
29
31
33
34
34
34
35
2 Eingangs/Ausgangslinearisierung
2.1 Der Eingrößenfall . . . . . . . . . . . . . . . .
2.2 Tensor Bündel . . . . . . . . . . . . . . . . . .
2.2.1 Lie-Ableitungen und die Lie-Klammer
2.2.2 Die äußere Ableitung . . . . . . . . . .
2.3 Der Eingrößenfall II . . . . . . . . . . . . . . .
2.4 Der Mehrgrößenfall . . . . . . . . . . . . . . .
2.5 Schlussbemerkungen . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
37
37
39
40
43
45
45
47
3 Erreichbarkeit und Beobachtbarkeit
3.1 Distributionen und die Sätze von Frobenius
3.2 Beobachtbarkeit . . . . . . . . . . . . . . . .
3.3 Erreichbarkeit . . . . . . . . . . . . . . . . .
3.4 Eingangs/Zustandslinearisierung . . . . . . .
3.4.1 Der Eingrößenfall . . . . . . . . . . .
3.4.2 Der Mehrgrößenfall . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
48
49
53
58
61
62
64
i
.
.
.
.
.
.
INHALTSVERZEICHNIS
3.5
INHALTSVERZEICHNIS
Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4 Mathematische Grundlagen
4.1 Topologie . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Topologische Räume . . . . . . . . . . . . . . . . .
4.1.2 Stetigkeit . . . . . . . . . . . . . . . . . . . . . . .
4.1.3 Konvergenz und Hausdorff-Räume . . . . . . . . . .
4.1.3.1 Teilräume, Produkt und Quotientenraum
4.1.4 Metrische Räume . . . . . . . . . . . . . . . . . . .
4.1.5 Kompaktheit . . . . . . . . . . . . . . . . . . . . .
4.1.6 Zusammenhang . . . . . . . . . . . . . . . . . . . .
4.2 Inverse und implizite Funktion . . . . . . . . . . . . . . . .
4.2.1 Mittelwertsätze . . . . . . . . . . . . . . . . . . . .
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
67
67
70
72
72
74
75
77
79
82
Kapitel 1
Mathematische Grundlagen
Diese Vorlesung widmet sich dynamischen Systemen, der Art
ẋ = f (t, x, u)
y = c (t, x, u)
(1.1)
(1.2)
mit dem n-dimensionalen Zustand x, dem m-dimensionalen Eingang u und dem l-dimensionalen Ausgang y. Vorerst sind f und c nur Funktionen passender Dimension. So ein
System wird auch als nichtlineares Regelungssystem in Zustandsdarstellung genannt. Allerdings ist die Klasse der nichtlinearen Regelungssysteme zu allgemein, und es werden im
weiteren Einschränkungen für die Funktionen f und c so gesucht, dass die eingeschränkte
Klasse von Systemen leichter handhabbar wird, aber auch für die Anwendung interessant
bleibt. Die Wahl
f (t, x, u) = Ax + Bu
c (t, x, u) = Cx + Du
mit geeigneten Matrizen A, B, C, D führt z.B. auf die Klasse der linearen und zeitinvarianten Systeme. So ist die Wahl des Zustandsraumes Rn , siehe auch aut1, aut2, eine
natürliche für diese Klasse. Wie später gezeigt wird, trifft dies auf nichtlineare Systeme
nicht mehr zu. Ähnliche Überlegungen gelten für den Eingangs- und Ausgangsraum.
Im Rahmen dieser Vorlesung wird nun nicht mehr die Matrizenschreibweise, siehe
auch aut1, aut2, benutzt, sondern die weitaus flexiblere Tensorschreibweise. Beispielhaft
betrachte man den Rn mit einer Basis B = {e1 , . . . , en } und Koordinaten (x1 , . . . , xn ).
Ein Punkt p des Rn wird dann mittels der Koordinaten xi = xi (p), i = 1, . . . , n durch
p = xi (p) ei beschrieben. Man beachte, dass das Symbol xi sowohl eine Koordinate als
auch die Koordinatenfunktion xi : Rn → R bezeichnet, also jene Funktion, die dem Punkt
p die Koordinate xi bezüglich der Basis B zuordnet. Auch wurde bereits die Einsteinsche
Konvention für Summen mit der Abkürzung
n
X
ai bi = ai bi
i=1
verwendet, wobei der Indexbereich i = 1, . . . , n noch unterdrückt wird, wenn er vom
Zusammenhang her bekannt ist. Man betrachte nun eine stetig differenzierbare Funktion
1
1.1. Geometrische Methoden
1. Mathematische Grundlagen
f (x) : Rn → R, dann verwenden wir für die partiellen Ableitungen die Abkürzung
∂
f (x) = ∂i f (x) ,
∂xi
∂
= ∂i
∂xi
sofern keine Verwechslung möglich ist.
Die Wahl des Zustands-, Eingangs- und Ausgangsraumes war im linearen und zeitinvarianten Fall nun sehr einfach. Im nichtlinearen Fall muss nun ebenfalls für jede Systemklasse ein geeigneter Zustandsraum gewählt werden. Dies wird vorerst an Hand von
einigen Beispielen diskutiert.
1.1
Geometrische Methoden
Dynamische Systeme der Art
ẋ = f (x, u)
y = c (x, u)
(1.3)
(1.4)
mit dem n-dimensionalen Zustand x, m-dimensionalen Eingang u und l-dimensionalen
Ausgang y werden hier mit (differential-) geometrischen Methoden behandelt. Es bezeichne x (t), u (t), y (t) eine Lösung obigen Systems, es gilt also
∂t x (t) = f (x (t) , u (t))
y (t) = c (x (t) , u (t)) ,
(1.5)
(1.6)
dann sind durch t 7→ x (t), t 7→ u (t), t 7→ y (t) Abbildungen gegeben, wobei noch deren Bildbereich zu klären ist. Außerdem liegen diese Kurven in speziellen Flächen, siehe
(1.5), (1.6), die wieder in Räumen mit Koordinaten (ẋ, x, u) und (y, x, u) liegen. Also
muss vorerst die Beschaffenheit dieser Räume geklärt werden, damit man diese Flächen
untersuchen kann. Beides wird nun mit differentialgeometrischen Methoden geschehen.
Die Gleichungen dieser Flächen sind offensichtlich durch (1.3), (1.4) gegeben.
Man betrachte nun Transformationen der Art
x̄ = ϕ (x)
(x̄, ū) = ψ (x, u) = (ϕ (x) , υ (x, u))
ȳ = χ (x, u, y) ,
wobei die Abbildungen ϕ, ψ, χ umkehrbar eindeutig seien, dann hat das transformierte
System die Gestalt
x̄˙ i = ∂j ϕi ◦ ψ −1 (x̄, ū) f j ◦ ψ −1 (x̄, ū)
= ∂j ϕi f j ◦ ψ −1 (x̄, ū)
ȳ = χ (x, u, c (x, u)) ◦ ψ −1 (x̄, ū) .
Offensichtlich ist dieses System wieder ein Regelungssystem. Weiters ändern unter gewissen (einfachen) Bedingungen solche Transformationen nicht die geometrischen Eigenschaften obiger Flächen. Daher werden solche Transformationen ein wichtiges Hilfsmittel
2
1.1. Geometrische Methoden
1. Mathematische Grundlagen
sein, die Eigenschaften dieser Flächen zu klären. Zusammenfassend kann man festhalten,
dass wir hier mehr an den geometrischen Eigenschaften der durch (1.3), (1.4) definierten
Flächen als an den Lösungen (1.5), (1.6) interessiert sind.
10
9
70
8
60
7
6
ẋ
x̄˙
50
5
4
40
3
30
2
1
20
10
0
0.0
0.2
u
0.4
0.6
0.8
1.0
10
9
7
8
6
5
4
0
0
3
1
2
ū
x
3
4
5
5.0
4.5
4.0
3.5
3.0
2.5
2.0
x̄
1.5
1.0
0.5
0.0
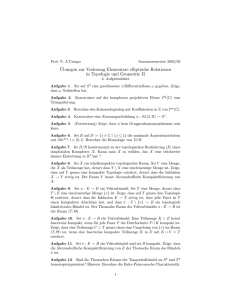
Bild 1.1: Graph zu Glg. (1.7) links und Glg. (1.8) rechts.
Als einfaches Beispiel wird das System
ẋ = x ln (x) +
x
u
ln (x)
(1.7)
betrachtet. Den Graphen dazu zeigt die linke Seite von Bild 1.1. Die Transformation
x̄ = ln (x) ,
ū =
x
u
ln (x)
führt nun zu
1
x
x̄˙ = x ln (x) +
u
x
ln (x)
= (x̄ + ū) .
(1.8)
Der zugehörige Graph ist der rechten Seite von Bild 1.1 zu entnehmen. Die speziellen
Lösungen
u = et ,
x̄ = (t + 2) et ,
t
u = (t + 2) e2t−(t+2)e ,
t
x = e(t+2)e ,
x̄˙ = (t + 3) et
ẋ = (t + 3) et+(t+2)e
t
liegen nun in den jeweiligen Flächen. Das Problem, eine Transformation so zu finden,
dass das transformierte System linear ist, ist also äquivalent zur Bestimmung einer Transformation, die die Fläche der linken Seite von Bild 1.1 auf eine Ebene, siehe die rechte
Seite, abbildet. Man sieht also einfach, dass dieser Ansatz speziell für nichtlineare Systeme geeignet ist, da man mit diesem Zugang die Lösung des dynamischen Systems nicht
konstruieren muss.
3
1.2. Der Zustandsraum autonomer Systeme
1.2
1. Mathematische Grundlagen
Der Zustandsraum autonomer Systeme
Man betrachte vorerst das lineare und zeitinvariante System
ẋi = Aij xj
(1.9)
mit i, j = 1, . . . , n. Wählt man nun den linearen Vektorraum Rn als Zustandsraum X ,
dann sind die strukturerhaltenden Koordinatentransformation auf die Klasse
x̄i = Tji xj
(1.10)
mit invertierbarer Matrix Tji eingeschränkt. Ein Lösung des Systems (1.9) ist eine Abbildung γ : R → Rn oder eine Kurve mit Kurvenparamter τ ∈ R, die der Beziehung
∂τ γ i (τ ) = Aij γ j (τ )
genügt. Das Paar (γ i (τ ) , ∂τ γ i (τ )) ist nun Element eines neuen Raumes, des Tangentialraums T (Rn ) von Rn , für den wir die Koordinaten (xi , ẋi ) verwenden. Aus (1.10) folgt
nun
γ̄ i (τ ) = Tji γ j (τ )
∂τ γ̄ i (τ ) = Tji ∂τ γ j (τ )
oder
x̄˙ i = Tji ẋj .
(1.11)
Damit gilt aber auch T (Rn ) = Rn × Rn , eine besondere Eigenschaft, die den Rn auszeichnet.
Für nichtlineare Systeme ist es jedoch zweckmäßig, allgemeinere Transformationen
zuzulassen. Dazu betrachte man folgendes System
ẋ1 = x1 ln x2
ẋ2 = −x2 ln x1 ,
dessen Zustandsraum wegen x1 , x2 > 0 nicht der R2 sein kann. Die Transformation R+ ×
R+ → R2
x̄1 = ln x1
x̄2 = ln x2
mit
1 1
ẋ
x1
1
x̄˙ 2 = 2 ẋ2
x
x̄˙ 1 =
führt auf das lineare System
x̄˙ 1 = x̄2
x̄˙ 2 = −x̄1 ,
4
1.3. AI-Systeme
1. Mathematische Grundlagen
wobei man für den Zustandsraum hier den R2 wählen kann. Mit Hilfe von nichtlinearen Zustandstransformationen lassen sich also überraschende Ergebnisse erzielen. So wird
obiges System durch lineare Differentialgleichungen beschrieben.
Wenn nicht anders darauf hingewiesen wird, werden in dieser Vorlesung autonome
Systeme der Art
ẋi = f i (x) , i = 1, . . . , n
(1.12)
betrachtet, deren Zustandsraum X eine abstrakte, n-dimensionale, glatte Mannigfaltigkeit
mit Koordinaten (xi ), i = 1, . . . , n ist. Die zulässigen Koordinatentransformationen sind
nichtlineare Diffeomorphismen der Art
x̄i = ϕi (x) .
(1.13)
Nun folgen aus dieser Beziehung für eine Kurve γ : [0, ε) → X , ε ∈ R+ , die Lösung von
(1.12) ist, d.h. es gilt
∂τ γ i (τ ) = f i ◦ γ (τ )
aus (1.12), (1.13) die Beziehungen
γ̄ i (τ ) = ϕi ◦ γ (τ )
∂τ γ̄ i (τ ) = ∂j ϕi ◦ γ (τ ) ∂τ γ j (τ ) ,
j = 1, . . . , n
aus denen man die Transformationsvorschrift
x̄˙ i = ∂j ϕi (x) ẋj
(1.14)
gewinnt. Man beachte, dass im nichtlinearen Fall die Transformation für die Koordinaten
ẋi nicht mehr mit der für die Koordinaten xi zusammen fällt. Das Paar (γ i (τ ) , ∂τ γ i (τ ))
ist wieder Element eines neuen Raumes, des Tangentialraums T (X ) des Zustandsraumes
X . Um die Eigenschaften dieses Raumes zu klären, muss man wissen, wie T (X ) von X
abgeleitet wird. Abschließend ist noch zu bemerken, dass der Zustandsraum freier Systeme
n-ter Ordnung nicht eine abstrakte, n-dimensionale, glatte Mannigfaltigkeit, sondern ein
Bündel ist.
1.3
AI-Systeme
Ein zeitinvariantes, dynamisches System n-ter Ordnung mit m Eingängen und l Ausgängen der Form
ẋi = ai (x) + Bςi (x) uς
y ζ = cζ (x) + Dςζ (x) uς
(1.15)
(1.16)
und i = 1, . . . , n, ς = 1, . . . , m, ζ = 1, . . . , l wird AI-System (Affine Input) genannt. Diese
Bezeichnung bezieht sich ausschließlich auf die Form der rechten Seiten von (1.15, 1.16).
Die Elemente der Größen a(x), B(x), c(x) und D(x) werden als glatt vorausgesetzt. Man
5
1.3. AI-Systeme
1. Mathematische Grundlagen
beachte, dass diese Voraussetzung lediglich aus Gründen der Vermeidung von Fallunterscheidungen getroffen wird. Erfüllt ein System diese nicht, dann sind die Untersuchungen
entsprechend zu erweitern. Ein AI Eingrößensystem hat noch die Form
ẋi = ai (x) + bi (x) u
y = c (x) + d (x) u
Sehr viele technische Systeme haben nun die Form von AI Systemen. So sind lineare
Systeme der Form
ẋi = Aij xj + Bςi uς
y χ = Ciχ xi + Dςχ uς
wegen
ai (x) = Aij xj , Bςi (x) = Bςi , cζ (x) = Ciζ xi
und Dςζ (x) = Dςζ
natürlich AI-Systeme. Die bilinearen Systeme gehören ebenfalls zur Klasse der AI Systeme.
Sie haben die Form
i
ẋi = Aij xj + Nj,ς
xj + Bςi uς
y χ = Ciχ xi ,
wobei die Nichtlinearität nur beim Stelleingriff auftritt.
Man beachte nun eine Koordinatentransformation der Art
x̄ = ϕ (x)
(x̄, ū) = ψ (x, u) = (ϕ (x) , k (x) + M (x) u)
ȳ = l (x) + N (x) y ,
wobei die Abbildungen ϕ umkehrbar eindeutig und [Mτς (x)], [Nκχ (x)] regulär seien. Das
transformierte System hat nun die Gestalt
x̄˙ i = ∂j ϕi ◦ ϕ−1 (x̄) aj ◦ ϕ−1 (x̄) + ∂j ϕi Bςj ◦ ϕ−1 (x̄) M̄τς ◦ ϕ−1 (x̄) ūτ − k τ ◦ ϕ−1 (x̄)
= ∂j ϕi aj ◦ ϕ−1 (x̄) − ∂j ϕi Bςj M̄τς k τ ◦ ϕ−1 (x̄) + ∂j ϕi Bςj M̄τς ◦ ϕ−1 (x̄) ūτ
ȳ χ = lχ ◦ ϕ−1 (x̄) + Nκχ ◦ ϕ−1 (x̄) cκ ◦ ϕ−1 (x̄) +
+Dςκ ◦ ϕ−1 (x̄) M̄τς ◦ ϕ−1 (x̄) ūτ − k τ ◦ ϕ−1 (x̄)
= lχ + Nκχ cκ − Dςκ M̄τς k τ ◦ ϕ−1 (x̄) + Nκχ Dςκ M̄τς ◦ ϕ−1 (x̄) ūτ ,
es ist offensichtlich wieder ein AI System, wobei M̄τς die zu [Mτς ] inverse Matrix ist.
Als triviales Ergebnis erhält man, dass die Rückkopplung die AI Struktur erhält. Man
zeigt ebenfalls einfach, dass die Parallelschaltung, Hintereinanderschaltung und Inversion,
sofern möglich, von AI Systemen wieder auf AI Systeme führt.
Im Folgenden Abschnitt werden AI Systeme betrachtet, deren Zustandsraum eine ndimensionale, abstrakte und glatte Mannigfaltigkeit ist.
6
1.4. Beispiele zu AI Systemen
1.4
1. Mathematische Grundlagen
Beispiele zu AI Systemen
Differentialgeometrische Methoden haben viele Anwendungen in der Praxis. Dazu werden
zwei Beispiele, eines aus der Robotik und eines aus dem Gebiet der elektrischen Maschinen betrachtet. Kann man einen Roboter mit n Freiheitsgraden durch Gleichungen vom
Lagrange’schen Typ mit n Stellgrößen beschreiben, dann ist dieses System nämlich äquivalent zu n Doppelintegratoren. Auch eine Asynchronmaschine vom Käfigläufertyp ist
abgesehen von einem speziellen Zustand äquivalent zu einem linearen System. Daher ist
die Regelung so einer Maschine nur in der Nähe dieses singulären Punktes nicht trivial.
1.4.1
Einfache mechanische Systeme
Ein einfaches mechanisches System kann durch die Lagrange’schen Gleichungen beschrieben werden. Es seien x, i = 1, . . . , n die Koordinaten des Konfigurationsraumes K, dann
sind (xi , ẋi ) Koordinaten des Zustandsraumes X . Für den Zustandsraum X gilt hier offensichtlich X = T (K). Mit der Lagrange Funktion L : X → R folgt aus
d ˙
∂i L (x, ẋ) − ∂i L (x, ẋ) = ui ,
dt
für
∂
∂˙i = i ,
∂ ẋ
d
= ẍj ∂˙j + ẋj ∂j + ∂t
dt
1
L = ẋj Mjk (x) ẋk − V (x)
2
sofort
1
Mik (x) ẋk − ẋj ∂i Mjk (x) ẋk + ∂i V
2
1 j
1
k
j
j
l
Mik (x) ẋ + ẋ Mji (x) − ẋ ∂i Mjk (x) ẋk + ∂i V
Mij (x) ẍ + ẋ ∂l
2
2
1
j
Mij (x) ẍ + (∂j Mik (x) + ∂k Mji (x) − ∂i Mjk (x)) ẋj ẋk + ∂i V
2
Mij (x) ẍj + Γijk (x) ẋj ẋk + ∂i V
ẍ ∂˙l + ẋl ∂l + ∂t
l
(x) = ui
(x) = ui
(x) = ui
(x) = ui .
Um im Weiteren Fallunterscheidungen zu vermeiden, wird angenommen, dass die Massenmatrix [Mij ] regulär ist. Die Transformation
ui = ∂i V (x) + Γijk (x) ẋj ẋk + Mij (x) ūj
mit dem neuen Eingang ū führt nun auf
Mij (x) ẍj = Mij (x) ūj
ẍj = ūj .
Dieses System ist offensichtlich linear, es besteht aus n Doppelintegratoren.
7
1.4. Beispiele zu AI Systemen
1.4.2
1. Mathematische Grundlagen
Die Kurzschlussläufer Asynchronmaschine
Ein Prinzipbild für die Kurzschlussläuferasynchronmaschine ist in Abbildung 1.2 angegeben. Mit den Größen
us = u1s u2s u3s = ujs , j = 1, . . . , 3
is = i1s i2s i3s = ijs , j = 1, . . . , 3
(1.17)
1 2 3
j
Ψs = Ψs Ψs Ψs = Ψs , j = 1, . . . , 3
kann das elektrische Teilsystem des Statorkreises in der Form
ujs = Rs ijs +
d j
Ψ,
dt s
j = 1, . . . , 3
(1.18)
modelliert werden. Ψ1s , . . . ,Ψ3s bezeichnen hier die verketteten Flüsse der 3 Statorphasen,
i1s , . . . , i3s die zugehörigen Ströme und u1s , . . . , u3s die anliegenden externen Spannungen.
Der elektr. Widerstand der Ständerspulen ist symmetrisch mit Rs angenommen. Weiters
gilt für den verketteten Fluss
Ψjs = Ljs,k iks + Ljsr,k (φ) ikr
mit den Strömen der Rotorspulen
ir = i1r i2r i3r = ijr ,
j = 1, . . . , 3
der Induktivitätsmatrix des Stators
L0 + Lσ − L20
− L20
Ls = Ljs,k = − L20 L0 + Lσ − L20 ,
− L20 L0 + Lσ
− L20
sowie der Koppelinduktivitätsmatrix zwischen Stator und Rotor
L0 cos (φ)
L0 cos φ + 2π
L0 cos φ − 2π
3
3
2π
L
cos
(φ)
L
cos
φ
+
Lsr = Ljsr,k = L0 cos φ − 2π
0
0
3 3 .
2π
2π
L0 cos φ + 3 L0 cos φ − 3
L0 cos (φ)
(1.19)
(1.20)
Das mathematische Modell des elektrischen Rotor-Teilsystems kann nun analog in der
Form
d
ujr = Rr ijr + Ψjr , j = 1, . . . , 3
dt
angegeben werden, wobei hier die Komponenten des verketteten Rotorflusses mit
Ψr = Ψ1r Ψ2r Ψ3r = Ψjr , j = 1, . . . , 3
bezeichnet werden und für den Widerstand in den Rotorspulen Rr gilt. Der verkettete
Rotorfluss genügt wieder der Beziehung
Ψjr = Ljr,k ikr + Ljsr,k (φ) iks ,
8
1.4. Beispiele zu AI Systemen
1. Mathematische Grundlagen
ab-System
b
d
dq-System
φ
q
s2
r1
s1
r2
a
r3
Stator
s3
Rotor
Bild 1.2: Prinzipbild einer Kurzschlussläuferasynchronmaschine.
wobei hier Ljr,k = Ljs,k angenommen wird. Für den Rotorkreis einer Kurzschlussläuferasynchronmaschine gilt nun
ujr = 0, j = 1, . . . , 3.
Mit der magnetischen Energie bzw. Koenergie
ko
Wmag = Wmag
=
1 i
is δi,k Ψks + iir δi,k Ψkr
2
kann das elektrisch erzeugte Drehmoment der Maschine zu
Mel = −
∂
1 ∂ i
ko
is δi,k Ψks + iir δi,k Ψkr
Wmag
=−
∂φ
2 ∂φ
angegeben werden. Mit den Abkürzungen für die Induktivitätsmatrix bzw. die Widerstandsmatrix
k
j
diag (Rs )
0
Ls Lsr (φ)
L (φ) = Ll =
, R = Rl =
0
diag (Rr )
LTsr (φ) Lr
kann das mathematische Modell mit Ψ = (Ψs , Ψr ) kompakt in der Form
l
d j
j m
us ,
Ψ = −Rlj L−1 (φ) k Ψk + gm
dt
mit gii = 1 und gji = 0 für i 6= j geschrieben werden.
Die Blondel-Park-Transformation (siehe z.B. [4]) erlaubt es nun, die beiden elektrischen
Teilsysteme 3. Ordnung als äquivalente Systeme 2. Ordnung darzustellen. Man benützt
die Transformation
Ψ̄i = Pi,j (φ) Ψj ,
(Pi,j ) = P = P0 exp (V φ)
9
1.4. Beispiele zu AI Systemen
1. Mathematische Grundlagen
mit
exp (V φ) =
I
0
,
0 exp (V22 φ)
V22
und
P0 =
P0,11 0
,
0 P0,22
P0,11 = P0,22
0 −1 1
1
= √ 1 0 −1
3 −1 1 0
1 − 12 − 21
√
√
= 0 21 3 − 12 3 .
1 1
1
und erhält ein System, in dem ein stabiles, autonomes Teilsystem für die Stator- bzw.
Rotorflüsse der Form
Rs
3
d Ψ̄3s
− Lσs 0
Ψ̄s
=
(1.21)
Rr
3
0 − Lσr
Ψ̄3r
dt Ψ̄r
entsteht, welches für die weiteren Untersuchungen vernachlässigt werden kann.
Die Kurzschlussläufer-Asynchronmaschine kann nun durch ein dynamisches System 5.
Ordnung der Form
d i
Ψ̄s = −a1 Ψ̄is + b1 Ψ̄ir + ūis , i = 1, 2
(1.22)
dt
d i
Ψ̄ = b2 Ψ̄is − a2 Ψ̄ir + ωJji Ψ̄js , i = 1, 2
(1.23)
dt r
1
d
(MEl − ML ) , MEl = 2d Ψ̄1s Ψ̄2r − Ψ̄2s Ψ̄1r
(1.24)
ω=
dt
θm
0 −1
i
mit J = Jj =
und geeigneten Konstanten a1 , b1 , c1 , a2 , b2 , c2 und d beschrieben
1 0
werden. Das duch die Maschine erzeugte elektrische Moment wird mit MEl bezeichnet und
das extern aufgebrachte
Lastmoment mit ML . Darin bezeichnen weiter Ψ̄s = Ψ̄1s , Ψ̄2s
und Ψ̄r = Ψ̄1r , Ψ̄2r die Komponenten des verketteten Stator- bzw. Rotorflusses in 2Achsen Darstellung. ω ist die Drehwinkelgeschwindigkeit des Rotors und die Stellgrößen
für dieses System sind durch die Statorspannungen ūs = (ū1s , ū2s ) in 2-Achsen Darstellung
gegeben. θm bezeichnet das Trägheitsmoment des Rotors. Das System (1.22)-(1.24) ist
nun offensichtlich ein Mehrgrößen-AI-System.
Für dieses System kann nun eine exakte Linearisierung, wie sie im Abschnitt 1.4.1
angewandt wurde, für ein Teilsystem so vorgenommen werden, dass die Ausgänge dieser
Teilsysteme die für den Betrieb der Maschine interessanten Größen elektrisches Moment
und Rotorflussnorm sind.
Wählt man als gedachte Ausgänge das elektrische Moment MEl und die Quadratnorm
des Rotorflusses kΨr k22 , so kann die folgende Zustandstransformation aufgebaut werden:
Man bildet die totale zeitliche Ableitung dieser beiden Größen und wertet das Ergebnis
entlang der Systemtrajektorien aus. Dies ergibt
d
˙ 2 Ψ̄1 − Ψ̄
˙ 1 Ψ̄2 + Ψ̄2 Ψ̄
˙ 1 − Ψ̇1 Ψ̄
˙ 2 = 2d Ψ̄
MEl s r
s r
s r
s r
ẋ=a(x)+B(x)u
dt
ẋ=a(x)+B(x)u
= α1 (x) + β11 (x) ū1s + β21 (x) ū2s ,
10
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
mit geeigneten Funktionen α1 (x), β11 (x) und β21 (x) (Bitte Nachrechnen!). Genauso verfährt man mit dem Quadrat der Rotorflussnorm. Hier ist dieser Vorgang zwei Mal zu
wiederholen, bis man ein System der Form
!
d
d
2
= α2 (x) + β12 (x) ū1s + β22 (x) ū2s
kΨr k2 dt dt
ẋ=a(x)+B(x)u
ẋ=a(x)+B(x)u
erhält. Beim vorliegenden System ist die Matrix β =
Stellgrößentransformation
ū1s
ū2s
=β
−1
β11 β21
β12 β22
invertierbar, sodass die
1 α
v1
2 −
α2
v
ein lineares Teilsystem der Form
ż 1 = v 1
ż 2 = z 3
ż 3 = v 2
mit einem weiteren Teilsystem, welches als Nulldynamik bezeichnet wird.
Im Rahmen der Rechenübungen wird dieses Beispiel ausführlich diskutiert und ein
Maple-Paket vorgestellt, welches den Benutzer bei den notwendigen Rechenschritten
unterstützt. Ziel der weiteren Überlegungen im Rahmen der Vorlesung soll es nun sein
eine Methodik zu erarbeiten, zu testen, ob durch Zustandsrückführung so ein lineares
Teilsystem erzeugt werden kann und wie die maximale Dimension dieses Teilsystems ist.
Weiters sollen die Bestimmungsgleichungen (wir werden sehen, es sind partielle Differentialgleichungen) für die im Weiteren entscheidenden “linearisierenden Ausgänge” hergeleitet
werden. Dazu werden aber einige Grundlagen der Differentialgeometrie benötigt.
1.5
Abstrakte Mannigfaltigkeiten
Mannigfaltigkeiten gehören zu den wichtigsten Begriffen bei der Untersuchung von nichtlinearen, dynamischen Systemen. Hiezu betrachte man die Bewegung eines Punktes entlang
der x Achse, es gilt
ẋ = v
(1.25)
mit der Geschwindigkeit v. Gilt nun v = v (t) ∈ C ∞ ([0, ∞)), dann kann man diese
Gleichung elementar lösen. Als Zustandsmenge kann R gewählt werden. Untersucht man
jedoch die Bewegung eines Punktes auf dem Einheitskreis, es gelte
ϕ̇ = ω ,
(1.26)
dann kann wieder für ω = ω(t) die Gleichung elementar gelöst werden. Aber die Wahl
von R für die Zustandsmenge ist nicht sinnvoll, da x + 2kπ, k ∈ N dieselbe physikalische
11
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
Position beschreibt. Natürlich ist hier der Einheitskreis S1 die adäquate Zustandsmenge.
Anstelle obiger Gleichung kann man auch die Beziehungen
ẋ1 = ωx2 ,
ẋ2 = −ωx1
(1.27)
2
2
untersuchen, wobei die Anfangsbedingungen der Restriktion (x1 (0)) + (x2 (0)) = 1 genügen müssen. Setzt man noch
x1 = sin(ϕ) , x2 = cos(ϕ) ,
(1.28)
dann folgt
cos(ϕ) (ϕ̇ − ω) = 0,
sin(ϕ) (ϕ̇ − ω) = 0 .
Offensichtlich ist also (1.26) die lokale Version von (1.27). Man beachte, dass die Abbildung
(1.28) für ϕ ∈ R nicht injektiv ist. Diese hier beschriebenen Probleme treten bei der
Gleichung (1.25) nicht auf.
Eine glatte Mannigfaltigkeit ist die Verallgemeinerung einer m-dimensionalen glatten
Fläche im Rn mit n ≥ m. Obwohl man jede m-dimensionale glatte Mannigfaltigkeit in den
R2m+1 einbetten kann, beschreiten wir hier einen anderen Weg. Wir geben eine abstraktere
Definition einer glatten Mannigfaltigkeit, die ohne Einbettung in den Rn , für ein geeignetes
n, auskommt.
M
p
φβ
φα
y
x
x = φα (p) = φα φ−1
β (y)
y = φβ (p) = φβ (φ−1
α (x))
Bild 1.3: Zu Trägern und Koordinatenfunktionen von Karten.
Definition 1.1 Eine glatte m-dimensionale Mannigfaltigkeit ist eine Menge M, zusammen mit einer abzählbaren Menge von Teilmengen Uα ⊂ M, den Trägern der Karten,
und bijektiven Abbildungen φα : Uα → Vα auf zusammenhängenden offenen Teilmengen
Vα ⊂ Rm , den Koordinatenfunktionen, die folgende Eigenschaften aufweist. Die Menge
der Paare (Uα , φα ) heißen Karten.
1. Die Träger der Karte überdecken M, oder M = ∪α Uα .
2. Es gelte Uα ∩ Uβ = U =
6 { }, dann ist die Abbildung φβ ◦ φ−1
α : φα (U) → φβ (U) glatt.
3. Für jedes Paar von Punkten p ∈ Uα , q ∈ Uβ , p 6= q existieren offene Teilmengen
Wα , Wβ ⊂ Rm so, dass gilt φα (p) ∈ Wα ⊂ Vα , φβ (q) ∈ Wβ ⊂ Vβ und φ−1
α (Wα ) ∩
−1
φβ (Wβ ) = {}.
12
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
Man beachte, dass Karten eine Topologie für M ermöglichen, wobei man die offenen
m
Mengen φ−1
festlegt. Mit dieser
α (W ) mittels der offenen Mengen W ⊂ φα (Uα ) ⊂ R
Topologie besagt Punkt 3 von Definition 1.1, dass M die Trennungseigenschaft von Hausdorff besitzt. Der Grad der Differenzierbarkeit der Funktion φβ ◦ φ−1
α bestimmt den von
M. Wir werden nur glatte Mannigfaltigkeiten betrachten. Neben der ursprünglichen Karte φα : Uα → Vα kann man weitere Karten hinzufügen φγ : Uγ → Vγ ⊂ Rm mit der
−1
Bedingung, dass die Funktionen φγ ◦ φ−1
α , φα ◦ φγ auf den Mengen φα (Uγ ∩ Uα ) 6= {}
glatt für alle α, γ sind. In diesem Fall heißt die Karte φγ : Uγ → Vγ kompatibel mit der
Basiskarte. Die größtmögliche Menge aller kompatiblen Karten heißt ein Atlas von M.
Diesen Sachverhalt veranschaulicht Bild 1.3.
Der einfachste Fall einer m-dimensionalen Mannigfaltigkeit ist der Rm . Das m-Tupel
x = (x1 , . . . , xm ) sei ein Koordinatensystem des Rm , und ϕi seien Koordinatenfunktionen, die jeden Punkt q ∈ Rm in den R mittels xi = ϕi (q) abbilden. Bitte beachten Sie
die Änderung in der Notation. Wir schreiben xi für die i-te Koordinate xi oder das i-te
Element des Tupels (x1 , . . . , xi , . . . , xm ). Für die k-te Potenz von xi wird die Bezeichnung
k
(xi ) verwendet. Für eine m-dimensionale Mannigfaltigkeit M, mit Trägern Uα und Koordinatenfunktionen φα kann die zusammengesetzte Abbildung ϕi ◦ φα : M → R durch
ϕi ◦ φα (p) eingeführt werden. Man nennt nun die Funktionen xi (p) = ϕi ◦ φα (p) ebenfalls
Koordinatenfunktionen. Obwohl verschiedene Dinge gleich bezeichnet werden, sollte keine
Gefahr der Verwechslung bestehen. Darüberhinaus werden wir oft x = (x1 , . . . , xm ) als
lokales Koordinatensystem für M bezeichnen. Dies bedeutet soviel wie, es existieren auf
dem Träger Uα mit p ∈ Uα Koordinatenfunktionen φα : Uα → Vα auf offenen Mengen
Vα ⊂ Rm des Rm so, dass xi = φiα (p) = ϕi ◦ φα (p) gilt. Kennt man die Koordinaten von
p in einer Karte, dann sind sie natürlich für alle anderen Karten festgelegt.
b = φ2 (p) = φ2 φ−1
1 (a)
b
y
a = φ1 (p) = φ1 φ−1
2 (b)
p
a
x
xxxxxxxxxx
Bild 1.4: Karten für den Einheitskreis S1 .
Beispiele von Mannigfaltigkeiten wären die Kugel, der Torus, eine Gerade oder eine
Fläche im R3 . Alle diese Mannigfaltigkeiten lassen sich natürlich im R3 einbetten. In vielen
13
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
Fällen reicht eine Karte nicht aus. Bild 1.4 ist der Einheitskreis S1 mit den vier Karten
y (p)
x (p)
x (p)
b=
y (p)
y (p)
c=−
x (p)
a=
d=−
x (p)
y (p)
für
x (p) > 0
für
y (p) > 0
für
x (p) < 0
für
y (p) < 0
zu entnehmen. Diese Karten überlappen sich jeweils. So stehen im Bereich x (p) > 0 und
y (p) > 0 die Koordinaten der Karten 1 und 2 in der Beziehung
a=
1
b
bzw.
b=
1
.
a
Ebenso Mannigfaltigkeiten sind die m-dimensionalen Einheitskugeln Sm . Sie folgen aus
der Beziehung
m+1
X
2
xi = 1 ,
i=1
deren Lösungen glatte Untermannigfaltigkeiten des Rm+1 sind. Die Träger
Ui = Sm ∩ x ∈ Rm+1 | xi > 0 , U1+m+i = Sm ∩ x ∈ Rm+1 | xi < 0
zusammen mit den Projektionen auf die Ebenen xi = 0 und den Kartenfunktionen φi ,
φ1+m+i , bilden eine Karte. Im Gegensatz dazu ist der 2-dimensionale Kegel
x1
2
− x2
2
− x3
2
=0,
eingebettet im R3 , keine Mannigfaltigkeit, denn für den Ursprung existiert kein Träger
Uα , der bijektiv auf eine offene Menge des R2 abgebildet werden kann. Weniger triviale
Beispiele einer m-dimensionalen Mannigfaltigkeit wären der projektive Raum Pm (R), die
Menge aller Geraden durch den Ursprung im Rm+1 , oder die Menge der Drehungen im
R3 .
Relativ einfache Objekte, die man auf Mannigfaltigkeiten studieren kann, sind Funktion. Es sei M eine m-dimensionale glatte Mannigfaltigkeit und f : M → R eine Funktion.
Für einen Träger Uα mit Koordinatenfunktionen φα erhält man dann die Darstellung
f : Uα → R ,
fα = f ◦ φ−1
α ,
y = fα (x) = f ◦ φ−1
α (x) ,
wobei x Koordinaten von M und y die Koordinaten von R bezeichnen. Siehe dazu auch
Bild 1.5. Man nennt f an der Stelle p ∈ Uα differenzierbar (glatt), wenn fα an der Stelle
x = φα (p) differenzierbar (glatt) ist. Man überzeugt sich leicht, dass diese Eigenschaft
unabhängig von der Wahl der Karte ist. Bitte überlegen Sie sich diese Konstruktion! Die
14
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
M
p
f
y = f (p)
φα
f◦
x
φα−1
y = fα (x) = f (φα−1 (x))
Bild 1.5: Zu den glatten Funktionen f = C ∞ (M).
Menge aller glatten Funktionen auf M wird mit C ∞ (M) bezeichnet. Unter der Einschränkung auf einen Träger kann man offensichtlich die Differential- und Integralrechnung wie
gewohnt betreiben, sofern man dafür sorgt, dass die Operationen in allen kompatiblen
Karten gültig bleiben.
Als nächstes werden Abbildungen zwischen Mannigfaltigkeiten betrachtet. Es seien M
und N zwei glatte m- und n-dimensionale Mannigfaltigkeiten und f eine Abbildung der
Form f : M → N , siehe Bild 1.6. Man sagt nun, f ist glatt in einer Umgebung von p,
M
N
f
p
q
φα
ϕβ
ϕβ ◦ f ◦ φα−1
y
x
Bild 1.6: Zur Abbildung f : M → N zwischen Mannigfaltigkeiten M, N .
wenn es Karten mit p ∈ Uα , f (p) ∈ Vβ und Koordinatenfunktionen φα , ϕβ so gibt, dass
die Funktion fαβ ,
fαβ = ϕβ ◦ f ◦ φ−1
α ,
fαβ : φα (Uα ) → ϕβ (Vβ ) ⊂ ϕβ ◦ f (Uα )
glatt in den gewählten Karten ist.
Die Darstellung dieser Zusammenhänge in der Form der Abbildungen 1.5 oder 1.6 ist
nun etwas schwerfällig, einen Ersatz liefern die nachstehenden Diagramme.
M
−1
φα ↑↓ φα
f
−→ R
k
f ◦φ−1
α
φα (Uα ) ⊂ Rm −→ R
M
φ−1
α ↑↓ φα
φα (Uα ) ⊂ Rm
15
f
−→
ϕβ ◦f ◦φ−1
α
−→
N
ϕ−1
β ↑↓ ϕβ
ϕβ (Vβ ) ⊂ Rn
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
Eine glatte Abbildung f : M → N erlaubt aus einer Funktion g ∈ C ∞ (N ) eine
Funktion f ∗ (g) ∈ C ∞ (M) mittels der Vorschrift
f ∗ (g) = g ◦ f : M → R
zu konstruieren. Dies veranschaulicht auch das nachstehende Diagramm.
f
M −→ N
k
↓g ,
g◦f
M −→
R
∗
f (g)
f
M −→ N
↓g
k
g◦f −1
R ←− N
Die Funktion f ∗ (g) heißt auch der pullback von g durch f . Nur wenn f : M → N
ein (lokaler) Diffeomorphismus ist, können Funktionen von M auch nach N übergeführt
werden.
Durch geschickte Wahl von Karten können Abbildungen eine besonders einfache Gestalt annehmen. Hierzu interpretiere man die Abbildung f : U → V mit U ⊂ Rn und
V ⊂ Rn von Satz 4.10 als Abbildungen zwischen Mannigfaltigkeiten M und N . Es gelte
f (p) = q, p ∈ Uα , q ∈ Vβ . Nun findet man offene Mengen Uα′ ⊂ Uα , Vβ′ ⊂ Vβ so, dass
f (Uα′ ) = Vβ′ gilt. x, y seien lokale Koordinaten für M und N mit Koordinatenfunktionen
φα , ϕβ . Wählt man nun φ′α = ϕβ ◦ f , ϕ′β = ϕβ auf Uα′ , Vβ′ , dann nimmt dort fαβ die simple
Form
−1
−1
fαβ = ϕ′β ◦ f ◦ (φ′α ) = ϕ′β ◦ f ◦ f −1 ◦ ϕ′β
= id
oder
xi = y i ,
i = 1, . . . , n ,
an. Eine andere Wahl wäre φ′α = φα , ϕ′β = φ′α ◦ f −1 . Das nachstehende Diagramm verdeutlicht diesen Sachverhalt für einen (lokalen) Diffeomorphismus f : M → N .
M
φ′α ↓
f
⇄
f −1
id
φα (Uα′ ) ⊂ Rn ⇄ ϕβ
N
↓ ϕ′β
Vβ′ ⊂ Rn
Auf Grund obiger Konstruktion kann man den Rang einer Abbildung f : M → N
einführen. Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten und f
eine Abbildung f : M → N , der Rang von f an der Stelle p ist dann einfach durch den
Rang der Jacobi Matrix in den speziellen Karten (Uα , φα ), (Vβ , ϕβ ) für M, N oder durch
∂ j
−1
rank (f ) (p) = dim
ϕ ◦ f ◦ (φα )
(φα (p)) , i = 1, . . . , m , j = 1, . . . , n
∂xi β
gegeben. Man sagt, f habe den Rang k auf einer Menge U ∈ M, falls der Rang von f auf
U konstant ist. Weiters sagt man, f habe maximalen Rang, falls rank (f ) = min (m, n)
gilt. Der Fall m = n ist bereits behandelt.
Es gelte m > n, dann existieren Karten (Uα , φα), (Vβ , ϕβ ) und Koordinaten x, y für
M, N so, dass f durch
y = fαβ (x) = ϕβ ◦ f ◦ φ−1
α (x)
16
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
gegeben ist. Nun existieren immer Funktionen g i so, dass die Abbildung g : Rm → Rm ,
i
x̄i = g i (x) = fαβ
(x) , i = 1, . . . , n
x̄j = g j (x) , j = n + 1, . . . , m
maximalen Rang hat und damit ein (lokaler) Diffeomorphismus ist. Die Abbildung x̄ =
g (x) ist also lokal umkehrbar, und es existieren offene Mengen
U1 ⊂ Rn , U2 ⊂ Rm−n und
V ⊂ Rn so, dass gilt g (φα (Uα′ )) = U1 × U2 , V = ϕβ Vβ′ für offene Mengen Uα′ ⊂ Uα ,
f (Uα′ ) = Vβ′ ⊂ Vβ . In den Koordinaten x̄ und y hat f nun die einfache Form
y i = y i fαβ ◦ g −1 (x̄) = x̄i , i = 1, . . . , n .
Dies veranschaulicht wieder das nachfolgende Diagramm.
f
M
φα ↓
−→
fαβ
φα (Uα′ ) ⊂ Rm −→ ϕβ
g↓
pr1
U1 × U2
−→
N
↓ ϕβ
′
Vβ ⊂ R n
k
V
Man nennt so ein f auch eine (lokale) Submersion.
Nun gelte m < n, dann existieren wieder Karten (Uα , φα ), (Vβ , ϕβ ) und Koordinaten
x, y für M, N so, dass f durch
y = fαβ (x) = ϕβ ◦ f ◦ φ−1
α (x)
gegeben ist und die Matrix
∂ i
f (x)
∂xj αβ
, i, j = 1, . . . , m
regulär ist. Damit existieren aber immer Funktionen hj so, dass die Abbildung h : Rn →
Rn
i
y i = hi (ȳ) = fαβ
ȳ 1 , . . . , ȳ m , i = 1, . . . , m
j
ȳ 1 , . . . , ȳ m + ȳ j , j = m + 1, . . . , n
y j = hj (ȳ) = fαβ
ein (lokaler) Diffeomorphismus ist. Die Abbildung y = h (ȳ) ist also lokal umkehrbar,
und es existieren
offene Mengen U ⊂ Rm und V1 ⊂ Rm , V2 ⊂ Rn−m so, dass gilt
−1
′
h
ϕβ Vβ = V1 × V2 , U = φα (Uα′ ), Vβ′ = f (Uα′ ) für offene Mengen Uα′ ⊂ Uα , Vβ′ ⊂ Vβ .
In den Koordinaten x, ȳ hat f nun die einfache Form
ȳ i = ȳ i h−1 ◦ fαβ (x) = xi , i = 1, . . . , m
ȳ j = ȳ j h−1 ◦ fαβ (x) = 0 , j = m + 1, . . . , n .
17
1.5. Abstrakte Mannigfaltigkeiten
1. Mathematische Grundlagen
Diesen Sachverhalt veranschaulicht wieder das nachfolgende Diagramm.
f
M
φα ↓
−→
φα (Uα′ ) ⊂ Rm
k
U
N
↓ ϕβ
fαβ
−→ ϕβ Vβ′ ⊂ Rn
h−1 ↓
i
−→
V1 × V2
In diesem Fall nennt man f auch eine (lokale) Immersion.
Als nächstes wollen wir den Begriff einer Untermannigfaltigkeit einführen. Grob gesprochen ist eine Untermannigfaltigkeit S einer Mannigfaltigkeit M eine Teilemenge S ⊂ M,
die selbst wieder eine Mannigfaltigkeit ist. Bis zu diesem Punkt stimmt die Literatur
weitgehend überein, allerdings werden für S verschiedene Topologien zugelassen. Zur Veranschaulichung der Probleme betrachte man zuerst die Beispiele.
f : R → R3 ,
f (t) = (cos(2πt) , sin(2πt) , t)
(1.29)
f : R → R2 , f (t) = (cos(2πt) , sin(2πt))
2
f : (1, ∞) → R , f (t) =
2
f : (1, ∞) → R , f (t) =
1
1
cos(2πt) , sin(2πt)
t
t
(1.30)
t+1
t+1
cos(2πt) ,
sin(2πt)
2t
2t
f : R → R2 , f (t) = (2 cos(t − π/2) , sin(2 (t − π/2)))
f : R → R2 , f (t) = (2 cos(2 arctan(t) + π/2) , sin(2 (2 arctan(t) + π/2)))
(1.31)
(1.32)
(1.33)
(1.34)
Diese Beispiele zeigen, dass eine Immersion nicht injektiv sein muss, siehe Gl. (1.30) und
Gl. (1.33). Dazu nachstehende Definition.
Definition 1.2 Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten,
und f sei eine injektive Immersion f : M → N . Das Paar (f, M) heißt Untermannigfaltigkeit.
Eine Untermannigfaltigkeit kann eine sehr allgemeine Struktur haben, siehe dazu Gl.
(1.34). Die Menge S = f (R) entspricht der Figur 8, die sicher nicht homeomorph zu R
ist. Dazu nachstehende Definition.
Definition 1.3 Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten,
und f sei eine injektive Immersion f : M → f (M). Ist f auch noch ein Homeomorphismus, dann heißt f eine Einbettung, und das Paar (f, M) heißt eine eingebettete
Untermannigfaltigkeit.
18
1.6. Bündel
1. Mathematische Grundlagen
Offensichtlich sind die Beispiele Gl. (1.29), Gl. (1.31) und Gl. (1.32) Einbettungen. Es sei
f : M → N eine Immersion, dann gibt es zu jedem Punkt p ∈ M eine offene Menge Up
mit p ∈ Up so, dass f eingeschränkt auf Up eine Einbettung ist.
Reguläre Untermannigfaltigkeiten haben nun in speziellen Koordinaten eine besonders
einfache Darstellung.
Definition 1.4 Es sei N eine glatte n-dimensionale Mannigfaltigkeit. Man sagt die Menge S ⊂ N habe die m-Untermannigfaltigkeitseigenschaft, wenn gilt: Für jedes p ∈ S existiert eine Karte (U, φ) mit lokalen Koordinaten x = (x1 , . . . , xn ) so, dass φ (p) = 0 und
für alle q ∈ U ∩ S gilt
xm+i = φm+i (q) = 0 ,
i = 1, . . . , n − m .
Eine reguläre m-dimensionale Untermannigfaltigkeit von N ist eine Menge S ⊂ N , die
die m-Untermannigfaltigkeitseigenschaft besitzt.
Die meisten Mannigfaltigkeiten in dieser Vorlesung sind regulär, sodass wir nicht immer
darauf hinweisen werden.
Man kann nun mit Abbildungen zwischen Mannigfaltigkeiten Untermannigfaltigkeiten
erzeugen. Dies zeigen die nachstehenden Sätze.
Satz 1.1 Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten, und f
sei eine Einbettung. Die Untermannigfaltigkeit (iN , f (M)) ist eine reguläre m-dimensionale Untermannigfaltigkeit.
Der nachstehende Satz besagt nun, wann die Untermannigfaltigkeit regulär ist.
Satz 1.2 Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten, und
f sei eine injektive Immersion. Ist N oder M kompakt, dann ist (f, M) eine reguläre
m-dimensionale Untermannigfaltigkeit.
Der nachstehende Satz ist die Übertragung des Satzes 4.11 auf Mannigfaltigkeiten.
Satz 1.3 Es seien M, N zwei glatte m- und n-dimensionale Mannigfaltigkeiten, und f
sei eine Submersion. Die Untermannigfaltigkeit (iM , f −1 (p)), p ∈ f (M) ⊂ N ist eine
abgeschlossene, reguläre (m − n)-dimensionale Untermannigfaltigkeit.
1.6
Bündel
Bündel können auch als die Verallgemeinerung kartesischer Koordinatensysteme angesehen werden. Bild 1.7 zeigt auf der linken Seite den Graph einer Funktion f : R → R im R2 .
Der Graph von f ist nichts anderes als die Abbildung gr (f ) : R → R2 mit x → (x, f (x)),
die offensichtlich die Bedingung
pr1 (gr (f ) (x)) = x
erfüllt. Diese Konstruktion kann nun einfach auf Mannigfaltigkeiten übertragen werden.
M und N seien zwei Mannigfaltigkeiten, f : M → N eine Abbildung zwischen ihnen.
19
1.6. Bündel
1. Mathematische Grundlagen
Ex
u
E
(x, f (x))
σ (p)
π
p
pr1
x
x
B
Ep
Bild 1.7: Zu Graph und Bündel.
Der Graph von f ist die neue Abbildung gr (f ) : M → M × N , p ∈ M, die natürlich
wieder der Bedingung
pr1 (gr (f ) (p)) = p
genügt. Das Produkt M×N nennt man die totale Mannigfaltigkeit und M die Basismannigfaltigkeit oder Basis. Allerdings kann diese Konstruktion noch einfach verallgemeinert
werden, siehe dazu die Abbildung 1.7.
Definition 1.5 Eine gefaserte Mannigfaltigkeit ist das Tripel (E, π, B) mit den Mannigfaltigkeiten E, dim (E) = m + n, B, dim (B) = m und der Abbildung π : E → B, die
eine surjektive Submersion ist. Die Mannigfaltigkeit E heißt die totale Mannigfaltigkeit,
die Abbildung π die Projektion und die Mannigfaltigkeit B die Basismannigfaltigkeit. Die
Teilmenge Ep = π −1 (p) von E heißt die Faser über p ∈ B.
In vielen Fällen ist die Idee einer gefaserten Mannigfaltigkeit zu allgemein, da verschiedene
Fasern verschiedene topologische Strukturen besitzen können. Dieses Problem kann man
lösen, wenn man darauf besteht, dass verschiedene Fasern diffeomorph zur typischen Faser
sind. Diese Konstruktion führt dann auf ein Bündel.
Definition 1.6 Eine gefaserte Mannigfaltigkeit (E, π, B) ist genau dann ein Bündel, wenn
eine Mannigfaltigkeit F , die typische Faser, und eine Abbildung ψ : π −1 (Up ) → Up × F ,
definiert auf einer Umgebung Up von p ∈ B so existiert, dass pr1 ◦ ψ = π gilt, sowie dass
F , Ep für alle p diffeomorph sind.
Diesen Sachverhalt veranschaulicht das nachstehende Diagramm.
(x,u)
ψ
π −1 (Up ) −→ Rm × Rn
π↓
↓ pr1
π −1 (Up ) −→ Up × F
π↓
↓ pr1
Up
=
Up
Up
(x)
−→
Rm
Für ein Bündel kann man adaptierte Koordinaten (x, u) lokal einführen mit xi , i =
1, . . . , m als Koordinaten für die Basismannigfaltigkeit B und uα , α = 1, . . . , n als Koordinaten für die typische Faser. Dies veranschaulicht ebenfalls obiges Diagramm. Bitte
20
1.6. Bündel
1. Mathematische Grundlagen
beachten Sie, dass die Symbole x, u sowohl für die Koordinaten als auch für die Koordinatenfunktionen verwendet werden. Ein noch einfacheres Bild erhält man, wenn man x
als die unabhängigen und u als die abhängigen Koordinaten auffasst. Wir verwenden von
jetzt an lateinische Indizes für die unabhängigen und griechische Indizes für die abhängigen Variablen. Darüberhinaus wird die Indexmenge nicht mehr angeführt, wenn sie vom
Kontext her klar ist.
Definition 1.7 Eine gefaserte Mannigfaltigkeit (E, π, B) heißt trivial, wenn sie isomorph
zu einem Produkt (B × F , pr1 , B) ist. Das Möbiusband ist ein Bündel, das nicht trivial ist.
Wenn die typische Faser ein linearer Vektorraum ist, heißt das Bündel Vektorbündel.
Nun können wir den Begriff des Graphen einer Funktion f : R → Rn auf Mannigfaltigkeiten übertragen.
Definition 1.8 (E, π, B) sei eine gefaserte Mannigfaltigkeit. Eine Abbildung σ : B →
E heißt ein Schnitt von π, wenn sie π ◦ σ = idB auf ihrem Definitionsgebiet mit der
identischen Abbildung idB auf B erfüllt. Die Menge aller Schnitte von (E, π, B) wird mit
Γ (E) abgekürzt.
Eine Mannigfaltigkeit muss nicht einen global definierten Schnitt besitzen. Ein einfaches
Beispiel dazu ist die Kugel S2 ⊂ R3 , denn man kann sich einfach vorstellen, dass man
nicht jedem Punkt von S2 auf stetige Weise einen nicht verschwindenden Tangentialvektor
zuweisen kann.
So wie man Abbildungen zwischen Mannigfaltigkeiten studiert, kann man Abbildungen zwischen Bündeln studieren, wobei solche von besonderem Interesse sind, die die
Bündelstruktur erhalten.
¯ π̄, B̄ seien zwei Bündel. Ein Bündelhomomorphismus
Definition 1.9 (E, π, B) und E,
¯ welche die Bedingung
ist ein Paar f = (fB , fE ) von Abbildungen fB : B → B̄, fE : E → E,
π̄ ◦ fE = fB ◦ π
auf ihren Definitionsgebieten erfüllen.
Diesen Sachverhalt veranschaulicht das nachstehende Diagramm. Dort ist auch gezeigt,
dass ein Schnitt σ ∈ Γ (E) eine spezielle Bündelabbildung ist.
f
B
idB k
E
E −→
Ē
π↓
↓ π̄
f
B
B
B −→
B̄
σ
−→
idB
=
E
↓π
B
Wählt man adaptierte Koordinaten (x, u) und (x̄, ū) für die Bündel (E, π, B), Ē, π̄, B̄ ,
dann ist ein Bündelhomomorphismus f durch die lokale Darstellung
x̄ = f¯B (x) ,
(x̄, ū) = f¯E (x, u)
gegeben, wobei f¯B , f¯E die Abbildungen fB , fE in diesen Koordinaten repräsentieren. Von
obigem Diagramm erkennt man sofort, dass ein Bündelhomomorphismus f = (fB , fE ) die
Konstruktion der Abbildung
fE ◦ σ = f∗ (σ) : B → E¯ ,
21
1.6. Bündel
1. Mathematische Grundlagen
für einen beliebigen Schnitt σ ∈ Γ (E) erlaubt. Ist allerdings
fB ein Diffeomorphismus,
dann kann ein Schnitt σ ∈ Γ (E) zu einem Schnitt σ̄ ∈ Γ Ē übergeführt werden gemäß
der Beziehung
σ̄ = f∗ (σ) ◦ fB−1 = fE ◦ σ ◦ fB−1 .
Man nennt den Schnitt σ̄ auch pushforward von σ durch f . Diesen Sachverhalt veranschaulicht das nachfolgende Diagramm.
f
E
E −→
Ē
π ↓↑ σ
π̄ ↓↑ σ̄
B
1.6.1
fB
B̄
⇄
−1
fB
Das Tangential- und Kotangentialbündel
Wie bereits oben erwähnt, ist ein Vektorbündel ein Bündel, dessen typische Faser ein
linearer Vektorraum ist. Es sei (E, π, B) ein Bündel mit lokalen Koordinatensystemen
(x, u) und (y, v), dann besteht zwischen diesen Systemen folgende Beziehung
dim(E)−dim(B)
i
i
α
y = f (x) , v =
mαβ
β
(x) u =
X
mαβ (x) uβ
β=1
mit einem Diffeomorphismus f und einer regulären Matrix mαβ . Von jetzt ab wird immer die Einsteinsche Konvention für Summen verwendet, sofern die Indexmenge vom
Kontext her klar ist. Diese erlaubt die Gleichungen übersichtlich und kurz zu halten. Das
Tangential- und das Kotangentialbündel sind nun spezielle Vektorbündel. Die adaptierten
Koordinaten des Tangentialbündels T (M) einer Mannigfaltigkeit M werden üblicherweise mit (xi , ẋj ), i, j = 1, . . . , dim (M) bezeichnet und ein Schnitt σ ∈ Γ (T (M)),
ẋi = σ i (x) , σ = σ i ∂i ,
∂
= ∂i
∂xi
(1.35)
wird als Tangentialvektorfeld bezeichnet. Wieso die Notation als Differentialoperator für
ein Tangentialvektorfeld sinnvoll ist, wird noch gezeigt. Nun seien (xi , ẋj ), (y i , ẏ j ) zwei
Koordinatensysteme von T (M), dann gilt
y i = f i (x) , ẏ i = ∂j f i (x) ẋj
(1.36)
für einen Diffeomorphismus f . Zu einer Mannigfaltigkeit M werden üblicherweise die adaptierten Koordinaten des Kotangentialbündels T ∗ (M) mit (xi , ẋj ), i, j = 1, . . . , dim (M)
bezeichnet und ein Schnitt σ ∈ Γ (T ∗ (M)),
ẋi = σi (x) , σ = σi dxi
(1.37)
wird als Kotangentialvektorfeld bezeichnet. Wieso dies sinnvoll ist, wird noch gezeigt. Für
zwei Koordinatensysteme (xj , ẋj ), (y i , ẏi ) von T ∗ (M) gilt
y i = f i (x) , ẋi = ∂i f j (x) ẏj
22
(1.38)
1.6. Bündel
1. Mathematische Grundlagen
für einen Diffeomorphismus f . Dass die Notation als Differential für ein Kotangentialvektorfeld sinnvoll ist, muss ebenfalls noch gezeigt werden.
Ehe die Betrachtungen fortgeführt werden können, wird noch nachstehende Definition
benötigt.
Definition 1.10 Es sei I ⊂ R ein offenes reelles Intervall, das 0 beinhaltet, und M eine
m-dimensionale glatte Mannigfaltigkeit. Eine glatte Abbildung ϕ : I × M → M heißt ein
(lokaler) Fluss auf M, wenn ϕ die folgenden Beziehungen
ϕ0 (p) = p
ϕε1 +ε2 (p) = ϕε1 ◦ ϕε2 (p) = ϕε2 ◦ ϕε1 (p)
ϕ−1
ε (p) = ϕ−ε (p)
für alle ε, ε1, ε2 ∈ Ī ⊂ I mit einem geeigneten Unterintervall Ī und alle p ∈ Uq , q ∈ M
erfüllt.
Ein Fluss erlaubt zwei einfache Interpretationen. Hält man ε ∈ I fest, dann ist ϕε : M →
M ein Diffeomorphismus auf M. Für festes p ∈ M ist ϕε (p) : I → M eine Kurve in der
Umgebung von p. Ein Fluss ϕε unterteilt also die Mannigfaltigkeit M lokal in eine Menge
von 1-dimensionalen Untermannigfaltigkeiten ϕε (p) : I → M. Darüberhinaus zeigt der
folgende Satz, dass ein Fluss in speziellen Koordinaten eine sehr einfache Darstellung hat.
Satz 1.4 Es sei ϕε : I × M → M ein (lokaler) glatter Fluss auf einer m-dimensionalen
glatten Mannigfaltigkeit M. Die Umgebung Up von p ∈ M gehöre zur Definitionsmenge
von ϕ, dann existieren Koordinaten (x) = (x1 , . . . , xm ) nahe p so, dass ϕε in diesen
Koordinaten gegeben ist durch
ϕ̄ε = x1 + ε, x2 , . . . , xm .
Dieser Satz heißt auch Flow Box Theorem. Zum Beweis des Satzes 1.4 wähle man Koordinaten (y) so, dass die Darstellung ϕ̃ε von ϕε den Bedingungen,
∂ 1 0 = φ (p) ,
6= 0
ϕ̃ (y)
∂ε ε
ε=0,y=0
genügt. Man überzeugt sich nun leicht, dass die Abbildung f ,
y = f (x) = ϕ̃x1 0, x2 , . . . , xm ,
ein Diffeomorphismus ist, und dass ϕε in diesen Koordinaten das Aussehen
ϕ̄ε (x) = f −1 ◦ ϕ̃ε ◦ f (x) = f −1 ◦ ϕ̃ε+x1 0, x2 , . . . , xm = x1 + ε, x2 , . . . , xm
hat.
Es sei ϕε ein Fluss auf M mit der Darstellung ϕ̄ε in einem Koordinatensystem x.
Differenziert man nun ϕ̄ε nach ε, erhält man
∂ i ∂ i
i
i
= v̄ ◦ ϕ̄ε (x) ,
v̄ =
(1.39)
ϕ̄ (x)
ϕ̄
∂τ τ
∂ε ε ε=0
τ =ε
23
1.6. Bündel
1. Mathematische Grundlagen
mit den Funktionen v̄ i ∈ C ∞ (Rm ). Diese Beziehung ist aber nichts anderes als das folgende
System
∂ i
x (ε) = v̄ i (x (ε))
(1.40)
∂ε
von m gewöhnlichen Differentialgleichungen in der unabhängigen Variablen ε. Ein Fluss
ϕε erzeugt also ein System von m gewöhnlichen Differentialgleichungen. Ist die Lösung
des Systems (1.39) eindeutig, dann erzeugt ein System von m Differentialgleichungen
einen (lokalen) Fluss. Dies folgt aus dem Satz über die Existenz und Eindeutigkeit des
Anfangswertproblems für explizite gewöhnliche Differentialgleichungen. Das m-Tupel v̄ =
(v̄ 1 , . . . , v̄ m ) nennt man auch den infinitesimalen Generator von ϕ̄ε in den Koordinaten
x. Man überzeugt sich nun einfach, dass für v̄ die Transformationsregeln (1.36) gelten, v̄
ist also ein Tangentialvektor.
Der infinitesimale Generator eines Flusses ϕε ist vorläufig nur in einer Karte definiert.
Um eine koordinatenfreie Darstellung zu gewinnen, wählt man eine Funktion g ∈ C ∞ (M)
und einen Fluss ϕε . Bezeichnet man mit ḡ, ϕ̄ε die Größen g, ϕε in einem Koordinatensystem x, dann kann man einfach ḡ (ϕ̄ε ) nach ε differenzieren und für p ∈ U ⊂ M folgt
dann
∂
(1.41)
= v̄ i (x) ∂i ḡ (x) = v̄ i ◦ φ (p) (∂i ḡ) ◦ φ (p)
ḡ (ϕ̄ε )
| {z }
∂ε
ε=0
v̄
mit den Funktionen v̄ i von (1.39). Man überzeugt sich wieder leicht, dass v̄ = v̄ i (x) ∂i
gemäß (1.36) transformiert wird. Dazu beachte man lediglich
v̄ f i (x) = ∂j f i (x) v̄ j (x) .
Weiters sieht man sofort, dass nur die Größen v̄ i ◦ φ (p) in die Beziehung (1.39) eingehen.
Damit entspricht der infinitesimale Generator eines Flusses
v̄x = v̄ i (x) ∂i
(1.42)
einem Differentialoperator, der folgende Regeln
v̄x (α1 g1 + α2 g2 ) = α1 v̄x (g1 ) + α2 v̄x (g2 ) , Linearität über R
v̄x (g1 g2 ) = v̄x (g1 ) g2 + g1 v̄x (g2 ) , Leibniz Regel
für alle g1 , g2 ∈ C ∞ (M) und Zahlen α1 , α2 ∈ R erfüllt. Diese Eigenschaft erlaubt nun,
den Tangentialraum an einem Punkt p ∈ M einer Mannigfaltigkeit M zu definieren.
Definition 1.11 Der Tangentialraum Tp (M) an der Stelle p ∈ M einer glatten mdimensionalen Mannigfaltigkeit M wird durch die Menge aller linearen Abbildungen vp , wp :
C ∞ (M) → R, die linear über den reellen Zahlen sind, und die Leibniz Regel erfüllen, gebildet. Die Vektorraumoperationen sind
(vp + wp ) (f ) = vp (f ) + wp (f ) ,
(αvp ) (f ) = vp (αf )
für alle f ∈ C ∞ (M) und α ∈ R. Weiters gilt dim (Tp (M)) = m.
24
1.6. Bündel
1. Mathematische Grundlagen
Eine lineare Abbildung, die die Leibniz Regel erfüllt, heißt Ableitung. Man gelangt nun
zum Tangentialbündel T (M) der Mannigfaltigkeit M, indem man die Tangentialräume
Tp (M) zu einem Bündel zusammenfügt.
Satz 1.5 Es sei M eine glatte m-dimensionale Mannigfaltigkeit, dann ist die Menge
T (M) = ∪p∈M Tp (M)
ein Bündel (T (M) , τM , M) mit der Projektion τM . Man nennt dieses Bündel auch das
Tangentialbündel von M. Die typische Faser F dieses Bündels ist ein m-dimensionaler
R-Vektorraum.
Zum Beweis dieses Satzes sei auf die Literatur verwiesen. Die Menge aller glatten Tangentialvektorfelder, oder der glatten Schnitte von T (M), wird wieder mit Γ (T (M))
bezeichnet. Es wird aber nicht verlangt, dass ein Schnitt global existiert.
Es sei nun f : M → N eine glatte Abbildung zwischen zwei Mannigfaltigkeiten M,
N , dann kann man f zu einem Bündelhomomorphismus (fB , fE ) erweitern, indem man
fB = f setzt und verlangt, dass fE = fT (M) : T (M) → T (N ) der Bedingung
fT (M) (v) (g) = v (fB∗ (g))
für alle g ∈ C ∞ (N ), v ∈ Γ (T (M)) genügt. Die Darstellung von fE in adaptierten Koordinaten (x1 , . . . , xm , ẋ1 , . . . , ẋm ), (y 1, . . . , y m, ẏ 1 , . . . , ẏ m ) für T (M), T (N ) lautet dann
y i = f¯i (x) ,
ẏ i = ∂j f¯i (x) ẋj ,
wobei f¯ die Darstellung von f in diesen Koordinaten bezeichnet. Ist f ein Diffeomorphismus, dann
kann man den sogenannten “pushforward” eines Feldes v ∈ Γ (T (M)) durch
f, fT (M) gemäß der Vorschrift
ṽ = fT (M) ◦ v ◦ f −1 = (f∗ (v)) ◦ f −1
(1.43)
bestimmen. Man vergleiche dazu die nachstehenden Diagramme
f∗
T (M) −→ T (N )
τM ↓↑ v
τN ↓↑ ṽ
f∗
T (M) −→ T (N )
τM ↓
τN ↓ ,
M
f
−→
M
N
f
⇄
f −1
.
N
Gegeben sei das Tangentialbündel (T (M) , τM , M) einer glatten m-dimensionalen
Mannigfaltigkeit M und ein Punkt p ∈ M, dann ist die typische Faser Tp (M) ein linearer Vektorraum über p. Wie in der linearen Algebra betrachtet man nun die linearen
Abbildungen ωp : Tp (M) → R. Wählt man nun Koordinaten (x1 , . . . , xm , ẋ1 , . . . , ẋm ) für
T (M), dann hat ein Schnitt v ∈ Γ (T (M)) die Form
v̄ = v̄ i (x) ∂i
(1.44)
mit glatten Funktionen v̄ i (x). Es bezeichne nun ω̄x die Abbildung ωp : Tp (M) → R in
diesen Koordinaten, dann gilt
ωp (vp ) = hωp , vp i = ω̄i (x) v̄ i (x) ,
25
x = φ (p)
1.6. Bündel
1. Mathematische Grundlagen
für glatte Funktionen ω̄i (x). Man beachte, dass diese Beziehung zusammen mit Gl. (1.36)
erzwingt, dass sich
ω̄x = ω̄i (x) dxi
(1.45)
gemäß (1.38) transformiert. Ein wohlbekannter Satz der linearen Algebra besagt nun, dass
der Raum aller linearen Funktionen (Linearformen, linearen Funktionale) Tp (M) → R
ein m-dimensionaler R-Vektorraum ist. Dieser Raum wird mit Tp∗ (M) bezeichnet, er wird
auch Dualraum genannt. Offensichtlich ist nun Tp∗ (M) punktweise konstruiert, und man
kann nun die Vorgehensweise beim Tangentialbündel übernehmen, indem man die Räume
Tp∗ (M) zu einem Bündel verschmilzt.
Satz 1.6 Es sei M eine glatte m-dimensionale Mannigfaltigkeit, dann ist die Menge
T ∗ (M) = ∪p∈M Tp∗ (M)
∗
∗
ein Bündel (T ∗ (M) , τM
, M) mit der Projektion τM
. Das Bündel heißt das Kotangentialbündel von M, seine typische Faser F ist ein m-dimensionaler R-Vektorraum.
Auch hier sei für den Beweis auf die Literatur verwiesen.
Die bilineare Abbildung h·, ·ip : Tp∗ (M) × Tp (M) → R lässt sich nun einfach zu einer
Abbildung h·, ·i : T ∗ (M) × T (M) → C ∞ (M) erweitern. In Koordinaten hat dieser
Ausdruck die Form ẋi ẋi oder
v⌋ω = hω, vi = ω̄i v̄ i
für Schnitte (1.35) und (1.37). Zusätzlich gilt
i dx , ∂j = δji
mit dem Kronecker Symbol δji .
Ist nun f : M → N eine glatte Abbildung zwischen den Mannigfaltigkeiten M, N ,
dann kann man den pull back eines Schnittes ω ∈ Γ (T ∗ (N )) berechnen. Man schreibt
nun für diese Abbildung f ∗ : T ∗ (N ) → T ∗ (M), und sie erfüllt natürlich die Regel
hf ∗ (ω) , vi = hω ◦ f, f∗ (v)i
für einen Schnitt v ∈ Γ (T (M)). Das folgende Diagramm
f∗
T ∗ (M)
⇄ T ∗ (N )
f∗
∗
τM
↓↑ f ∗ (ω)
M
f
−→
τN∗ ↓↑ ω
N
zeigt, dass f ∗ (ω) auch existiert, wenn f kein Diffeomorphismus ist. In den Koordinaten (x1 , . . . , xm , ẋ1 , . . . , ẋm ) und (y 1 , . . . , y n , ẏ1, . . . , ẏn ) für T ∗ (M) und T ∗ (N ) lautet die
Beziehung dann
ẋi = ∂i f¯j ẏj ◦ f¯ .
(1.46)
Ist f sogar ein Diffeomorphismus, dann kann ein Schnitt von T ∗ (M) in einen Schnitt
von T ∗ (N ) übergeführt werden. Man beachte hier diesen wesentlichen Unterschied bei
der Transformation von Tangentialvektoren und Kotangentialvektoren.
Von besonderem Interesse sind nun Kotangentialvektoren, die von Funktionen erzeugt
werden.
26
1.6. Bündel
1. Mathematische Grundlagen
Definition 1.12 Es sei M eine glatte m-dimensionale Mannigfaltigkeit. Das Differential
dg ∈ Γ (T ∗ (M)) zu g ∈ C ∞ (M) ist jener Kovektor, welcher der Bedingung
v⌋dg = hdg, vi = v (g)
für alle v ∈ Γ (T (M)) genügt.
Man überzeugt sich nun leicht, dass in Koordinaten (x1 , . . . , xm , ẋ1 , . . . , ẋm ) für T ∗ (M)
gilt
dḡ = ∂i ḡdxi oder ẋi = ∂i ḡ .
(1.47)
Mit dieser Beziehung folgt für (1.46) sofort
f¯∗ dy j = df¯j = ∂i f¯j dxi .
1.6.2
Freie und autonome Systeme
Betrachtet man nochmals das autonome System
ẋi = f i (x) , i = 1, . . . , n ,
(1.48)
dann erkennt man sofort, dass dieses System ein Vektorfeld
f = f i (x) ∂i
(1.49)
auf einer Mannigfaltigkeit M mit lokalen Koordinaten (x1 , . . . , xn ) beschreibt. Von jetzt
an wird auf das Symbol f¯ verzichtet, das auf die Beschreibung in einer speziellen Karte
hinweist. Wegen Satz 1.4 lassen sich lokal sogar Koordinaten so finden, dass gilt
ẋ1 = 1 , ẋi = 0 , i = 2, . . . , n .
Das Vektorfeld f von (1.48) ist natürlich auch ein Differentialoperator und damit eine
Abbildung f : C ∞ (M) → C ∞ (M).
Als nächstes wird das freie System
ẋi = f i (t, x) , i = 1, . . . , n
(1.50)
untersucht. Um ein geometrisches Bild zu erhalten, betrachte man das Bündel (E, π, B)
mit adaptierten Koordinaten (t) für B und (t, x1 , . . . , xn ) für E. Offensichtlich ist dann
f = f i (t, x) ∂i
ein Vektorfeld f ∈ Γ (T (E)). Aber f erfüllt noch die Bedingung
π∗ (f ) = 0 .
Man betrachte dazu wieder das nachstehende Diagramm
τ
E
E ←−
T (E)
π↓
π∗ ↓ .
τB
B ←− T (B)
27
(1.51)
1.6. Bündel
1. Mathematische Grundlagen
Ein Vektorfeld v ∈ Γ (T (E)) heißt nun projizierbar, wenn
π∗ (v) ∈ Γ (T (B))
gilt. Nun muss ein projizierbares Vektorfeld in adaptierten Koordinaten die Form
v = f t (t) ∂t + f i (t, x) ∂i
haben. Offensichtlich ist das Feld von (1.51) projizierbar. Es hat aber noch die spezielle
Eigenschaft f t = 0. Dazu nun folgende Definition.
Definition 1.13 (E, π, B) sei eine gefaserte Mannigfaltigkeit. Die Menge aller Schnitte
v ∈ Γ (T (E)) mit
π∗ (v) = 0
ist ein Unterbündel von T (E). Dieses Bündel heißt das vertikale Bündel, und es wird mit
V (E) bezeichnet.
Man könnte nun f von (1.51) als ein vertikales Vektorfeld auffassen, dann müsste aber
ṫ = 0 gelten. Man betrachte nun einen Schnitt σ ∈ Γ (E) zusammen mit dem Diagramm
τ
E
E ←−
T (E)
π ↓↑ σ
π∗ ↓↑ σ∗ .
τB
B ←−
T (B)
Die Abbildung σ∗ : T (B) → T (E) ist offensichtlich durch
t = t
ṫ
1
ẋ1 ∂t σ 1 (t)
x1 = σ 1 (t)
,
.. =
..
..
.
.
.
xn = σ n (t)
ẋn
∂t σ n (t)
gegeben. Man schreibt nun dafür, das Produkt ⊗ wird später erklärt,
∂t ⌋dt ⊗ fe = fe , dt ⊗ fe ⌋dt ⊗ fe = dt ⊗ fe
mit dem speziellen Vektorfeld
fe = ∂t + f i (t, x) ∂i = ∂t + f .
(1.52)
Wählt man g ∈ C ∞ (E) und bezeichnet ϕτ den Fluss zum Feld von (1.52), dann gilt
d
.
fe (g) =
g ◦ ϕτ (t, x)
dτ
τ =0
Damit beschreibt fe die totale zeitliche Änderung von g entlang einer Lösung von Gl.
1.50. Das freie System erzeugt damit auch den Differentialoperator von (1.52).
28
1.6. Bündel
1. Mathematische Grundlagen
Eine weitere Darstellung des Systems (1.50) erhält man mittels den speziellen Kovektoren
ω i = dxi − f i (t, x) dt ∈ Γ (T ∗ (E)) .
(1.53)
Man betrachte nun einen Schnitt σ ∈ Γ (E) zusammen mit dem Diagramm
τ∗
E
E ←−
T ∗ (E)
π ↓↑ σ
π ∗ ↑↓ σ ∗ ,
B
τ∗
B
←−
T ∗ (B)
dann folgt mit
sofort
σ ∗ ω i = dσ i (t) − f i ◦ σ (t) dt = ∂t σ i (t) − f i ◦ σ (t) dt = 0
∂t σ i (t) = f i ◦ σ (t) , i = 1, . . . , n .
Zusätzlich beachte man noch die Beziehung
fe ⌋ω i = 0 , i = 1, . . . , n .
1.6.3
Systeme mit Eingang
Betrachtet man nun das System
ẋi = f i (x, u) , i = 1, . . . , n ,
(1.54)
auf einer Mannigfaltigkeit M mit lokalen Koordinaten (x1 , . . . , xn ), dann erkennt man
sofort, dass für das Vektorfeld f ,
f = f i (x, u) ∂i
(1.55)
gilt
f∈
/ Γ (T (M)) .
Das Feld f beschreibt vielmehr eine Untermannigfaltigkeit des T (M), mit den lokalen
Koordinaten (x, u). Gilt insbesondere
f i (x, u) = ai (x) + bir (x) ur ,
dann beschreibt das System sogar eine affine Untermannigfaltigkeit. Um ein besseres geometrisches Bild zu bekommen, führt man nun das Bündel (Z, ρ, M) ein. Siehe dazu das
folgende Diagramm.
Z
τZ
⇆ T (Z)
f
ρ ↓↑ σ
ρ∗ ↓
τM
M ←− T (M)
29
1.6. Bündel
1. Mathematische Grundlagen
Ein Schnitt σ ∈ Γ (Z) ist offensichtlich wegen
ur = σ r (x) , r = 1, . . . , m
eine Zustandsregelung. Man beachte, dass zwar f = f i (x, u) ∂i ∈ Γ (T (Z)) gilt, aber f
ist wegen
ρ∗ (f ) = f
nicht projizierbar. Allerdings wäre (f i ◦ σ) ∂i ∈ Γ (T (M)) gegeben. Dazu nun folgender
Satz.
Satz 1.7 Gegeben sei das Bündel (E, π, B) und eine Abbildung f : B̄ → B zwischen den
Mannigfaltigkeiten B̄, B. Die Menge
f ∗ (E) = (x̄, (x, u)) ∈ B̄ × E | π ((x, u)) = x = f (x̄)
ist eine gefaserte Mannigfaltigkeit mit der Projektion
pr1 : f ∗ (E) → B̄ ,
(x̄, (x, u)) 7→ (x̄) .
Diesen Sachverhalt veranschaulicht auch das Diagramm
pr
2
f ∗ (E) −→
E
pr1 ↓
π ↓↑ σ ,
f
B̄ −→ B
pr
2
π̄ ∗ (E) −→
E
pr1 ↓
↓π ,
π̄
¯
E −→ B
pr
2
Ē
π (E) −→
pr1 ↓
↓ π̄
π
E −→ B
Ist ein σ ∈ Γ (E) gegeben, dann ist offensichtlich
durch (x̄, σ ◦ f (x̄)) ein Schnitt von f ∗ (E)
¯ Ē, π, B , dann schreibt man auch
gegeben. Gilt noch B̄ = E,
E ×B Ē .
In diesem Fall sind π̄ ∗ (E), π ∗ (E) Bündel. Vergleicht man nun die Diagramme, dann erhält
man
pr2
ρ∗
T (M)
T (Z) −→ ρ∗ (T (M)) −→
τZ ↓
pr1 ↓
↓ τM
Z
=
Z
ρ
⇄
σ
M
und somit das Ergebnis f = f i (x, u) ∂i ∈ Γ (ρ∗ (T (M))). Man beachte, dass im Allgemeinen aber für g ∈ C ∞ (Z) gilt
f i (x, u) ∂i g ◦ σ 6= f i ◦ σ ∂i (g ◦ σ) .
Der zeitvariante Fall
ẋi = f i (t, x, u) , i = 1, . . . , n ,
(1.56)
kann nun fast analog zum invarianten behandelt werden. Man wählt nun ein Bündel
(E, π, B) mit lokalen Koordinaten (t, x) für E und (t) für B. Wieder gilt für das Vektorfeld
f,
f = ∂t + f i (t, x, u) ∂i
(1.57)
30
1.7. Transformationen
1. Mathematische Grundlagen
die Beziehung
f∈
/ Γ (T (E)) .
Analog zu oben führt nun das Bündel (Z, ρ, E) mit lokalen Koordinaten (t, x, u) für Z
ein. Ein Schnitt σ ∈ Γ (Z) ist offensichtlich wegen
ur = σ r (t, x) , r = 1, . . . , m
eine Zustandsregelung. Man beachte, dass zwar f = ∂t + f i (t, x, u) ∂i ∈ T (Z) gilt, aber f
nicht projizierbar ist, sowie dass ∂t + (f i ◦ σ) ∂i ∈ T (E) erfüllt ist. Damit folgt aber sofort
das gewünschte Resultat f = ∂t + f i (t, x, u) ∂i ∈ ρ∗ (T (E)). Das folgende Diagramm zeigt
dazu die Zusammenhänge.
pr
ρ∗
2
T (Z) −→ ρ∗ (T (E)) −→
T (E)
τZ ↓
pr1 ↓
↓ τE
Z
=
Z
ρ
⇄
σ
E
Eine weitere Darstellung des Systems (1.50) erhält man mittels der speziellen Kovektoren
ω i = dxi − f i (t, x, u) dt ∈ ρ∗ (T ∗ (E)) ,
(1.58)
wobei zur Vollständigkeit das zurückgezogene Bündel ρ∗ (T ∗ (E)) im folgenden Diagramm
dargestellt ist.
pr2
ρ∗
T ∗ (Z) ←− ρ∗ (T ∗ (E)) −→
T ∗ (E)
τZ∗ ↓
pr1 ↓
↓ τE∗
Z
1.7
=
Z
ρ
⇄
σ
E
Transformationen
Abschließend werden noch einmal die relevanten Transformationen zusammengefasst. Hier
bezeichnen (t, x, u) die Koordinaten des gegebenen und (τ, y, v) die des transformierten
Systems. Im autonomen Fall (1.50) gilt dann
ẋα = f α (x) , ẏ α = f¯α (y) = (∂β ϕα ) f β ◦ ϕ−1 (y)
y = ϕ (x) , ẏ α = ∂β ϕα (x) ẋβ .
Für den freien Fall (1.52) folgt
ṫ = f t (t, x) = 1 , ẋα = f α (t, x)
τ̇ = f¯1 (τ, y) = (∂t φ) ◦ φ−1 (τ ) , ẏ α = f¯α (τ, y) = (∂β ϕα ) f β + ∂t ϕα ◦ ϕ−1 (τ, y)
τ = φ (t) ,
(τ, y) = ϕ (t, x) , τ̇ = ∂t φ (t) ṫ , ẏ α = ∂β ϕα (t, x) ẋβ + ∂t ϕα (t, x) ṫ .
Man beachte, dass im Allgemeinen τ̇ 6= 1 gilt. Man kann dies jedoch immer erreichen,
wenn man die nachstehende Transformation
τ̇ = 1 , ẏ α = f¯α (τ, y) = ∂β ϕα f β + ∂t ϕα ∂t φ−1 ◦ ϕ−1 (τ, y)
31
1.7. Transformationen
1. Mathematische Grundlagen
verwendet. Beachten Sie bitte aber den Bedeutungsunterschied.
Man beachte aber, dass für die Darstellung des Systems (1.53) sich die Transformation
folgendermaßen ändert
dxαx − f αx (t, x) dt
∂βy ϕαx (τ, y) dy βy + (∂τ ϕαx (τ, y) − f αx (t, x) ◦ ϕ (τ, y) ∂τ φ (τ )) dτ
t = φ (τ ) , (t, x) = ϕ (τ, y)
dt − ∂τ φ (τ ) dτ , dxαx − ∂βy ϕαx (τ, y) dy βy − ∂τ ϕαx (τ, y) dτ .
Für Systeme mit Eingang erhält man im zeitinvarianten Fall die Beziehungen
ẋα = f α (x, u) , ẏ α = f¯α (y, v) = (∂β ϕα ) f β ◦ ψ −1 (y, v)
y = ϕ (x) , ẏ α = ∂β ϕα (x) ẋβ ,
(y, v) = (ϕ (x) , ϕ̄ (x, u)) = ψ (x, u) ,
die sich für AI-Systeme folgendermaßen vereinfachen
ẏ α = āα (y) + b̄ααu (y) v αu
ẋα = aα (x) + bααu (x) uαu
= (∂β ϕα ) aβ − bβαu ψ̄βαuu ψ0βu ◦ ϕ−1 (y) + bβαu ψ̄βαuu ◦ ϕ−1 (y) v βu
y = ϕ (x) , ẏ α = ∂β ϕα (x) ẋβ , v αu = ψ0αu (x) + ψβαuu (x) uβu , ψβαuu ψ̄γβuu = δγαuu .
Im zeitvarianten Fall werden obige Transformationen für Systeme mit Eingang nur ein
wenig aufwendiger, aber es ändert sich nichts Prinzipielles.
Als Anwendung betrachte man das PCH-System (Port Controlled Hamiltonian)
ẋi = J ij (x) − Rij (x) ∂j H (x) + Bτi (x) uτ
yς = ∂i H (x) Bςi (x)
mit Hamiltonfunktion H, schiefsymmetrischer Strukturmatrix [J ij ] = − [J ji ], positiv
semidefiniter Dissipationsmatrix [Rij ] = [Rji ], dem m-dimensionalen Eingang uγ , γ =
1, . . . , m und dem m-dimensionalen Ausgang yς , ς = 1, . . . , m. Man beachte, dass dieses
System die (Passivitäts) Ungleichung
ẋi ∂i H (x) = −∂i H (x) Rij (x) ∂j H (x) + ∂i H (x) Bγi (x) uγ
= −∂i H (x) Rij (x) ∂j H (x) + yγ uγ
erfüllt. Die Koordinatentransformation
x̄ī = ϕī (x) ,
ūγ̄ = Mγγ̄ (x) uγ ,
ȳς¯ = M̄ς¯ς (x) yς ,
wobei M̄γ̄γ die zu Mγγ̄ inverse Matrix bezeichnet, führt das System nun über in
x̄˙ ī = ∂i ϕī (x) J ij (x) − Rij (x) ∂j H (x) + Bγi (x) uγ
γ
−1
i
γ̄
ī
ij
ij
j̄
= ∂i ϕ (x) J (x) − R (x) ∂j ϕ (x) ∂j̄ H ◦ ϕ (x̄) + Bγ (x) M̄γ̄ (x) u
= J¯īj̄ (x̄) − R̄īj̄ (x̄) ∂j̄ H̄ (x̄) + B̄γ̄ī (x̄) uγ̄
32
1.8. Schlussbemerkungen
1. Mathematische Grundlagen
bzw.
ȳς¯ = ∂i H̄ ◦ ϕ (x) Bςi (x) M̄ς¯ς (x)
= ∂ī H̄ ◦ ϕ (x) ∂i ϕī (x) Bςi (x) M̄ς¯ς (x)
= ∂ī H̄ (x̄) B̄ς¯ī (x̄)
mit
−1
H̄ (x̄) = H ◦ ϕ (x̄) ,
B̄ (x̄) = ∂i ϕī (x) Bγi (x) M̄γ̄γ (x) ,
īj̄
ī
ij
j̄
¯
J (x̄) = ∂i ϕ (x) J (x) ∂j ϕ (x) ◦ ϕ−1 (x̄) ,
R̄īj̄ (x̄) = ∂i ϕī (x) Rij (x) ∂j ϕj̄ (x) ◦ ϕ−1 (x̄) .
Es bezeichne X die Zustandsmannigfaltigkeit. Der Eingangsraum U ist ein Vektorbündel mit Koordinaten (xi , uγ ) und Basis X , dessen typische Faser der Rm ist. Der Ausgangsraum ist das Vektorbündel Y dual zu U mit Koordinaten (xi , uγ ) und Basis X ,
dessen typische Faser der (Rm )∗ ist. Die Matrix [Bτi ] repräsentiert eine lineare Abbildung
B : U → T (X ) wie auch deren duale Abbildung B ∗ : T ∗ (X ) → Y = U ∗ . Die Matrizen
[J ij ], [Rij ] repräsentieren eine schiefsymmetrische und eine positiv semidefinite Abbildung
vom Typ J, R : T ∗ (X ) → T (X ). Die obigen Transformationen drücken nun genau diese
Eigenschaften aus. Man beachte, dass noch gilt
ẋi ∂i H ◦ ϕ−1 (x̄) = − ∂i H (x) Rij (x) ∂j H (x) ◦ ϕ−1 (x̄) + yγ uγ
−∂ī H̄ (x̄) R̄īj̄ (x̄) ∂j̄ H̄ (x̄) + ȳγ̄ ūγ̄ .
Obige Transformation kann jedoch noch verallgemeinert werden. Dazu betrachte man den
Ansatz
x̄ī = ϕī (x)
ūγ̄ = k γ̄ (x) + Mγγ̄ (x) uγ ,
wobei k eine Lösung der Gleichungen
0 = J ij (x) − Rij (x) ∂j Ĥ (x) − Bγi (x) k γ (x)
für eine geeignete Funktion Ĥ ist. Man bestimme nun die Eigenschaften des Eingangsraums U und des Ausgangsraums Y , denn beide müssen hier affin sein. Weiters überlege
man, wie die Hamiltonfunktion H transformiert wird.
1.8
Schlussbemerkungen
Naturgemäß konnte in diesem Kapitel nur ein kleiner Ausschnitt aus der Differentialgeometrie und ihre Anwendungen auf regelungstechnische Probleme präsentiert werden.
Regelungstheoretische Untersuchungen von AI-Systemen findet man z.B. in [8, 13, 17]. Das
Buch [5] präsentiert zahlreiche Anwendungen von differentialgeometrischen Methoden auf
physikalische Probleme. Sucht man eine mathematische Einführung in die Differentialgeometrie, dann sind die Bücher [1, 3, 5, 19] zu empfehlen. Weiterführende Themen, die
sowohl für die Theorie dynamischer Systeme und die Regelungstheorie von Interesse sind
findet man z.B. in [2, 6, 14, 15, 16, 18], wobei zum Studium dieser Werke gute Kenntnisse
der Grundlagen der Differentialgeometrie erforderlich sind.
33
1.9. Aufgaben
1.9
1.9.1
1. Mathematische Grundlagen
Aufgaben
AI-Systeme
Aufgabe 1.1 Zeigen Sie, dass die Hintereinanderschaltung, Parallelschaltung und Inversion von AI–Systemen wieder zu AI–Systemen führt.
1.9.2
Mannigfaltigkeiten
Aufgabe 1.2 Gegeben sei die Einheitskugel im R3 (S2 ). Bestimmen Sie dazu eine Karte
(U, z). Wieviele Karten benötigt man für einen Atlas mindestens?
Aufgabe 1.3 Gegeben sei die Einheitskugel S2 im R3 (siehe obige Aufgabe). Bestimmen
Sie für einen Punkt x∈S2 und eine Karte (U, z) eine Basis für den Tangentialraum T (S2 ).
Aufgabe 1.4 Gegeben sei die Einheitskugel S2 im R3 (siehe obige Aufgabe). Zeigen Sie,
dass der Tangentialraum T (S2 ) unabhängig von der Wahl der speziellen Karte ist.
Aufgabe 1.5 Zeigen Sie, dass der Rn selbst eine n-dimensionale Mannigfaltigkeit ist.
Welche Gestalt hat der Tangentialraum des Rn an einer Stelle ?
Aufgabe 1.6 Der Zustand eines starren Körpers wird durch die Angabe seines Schwerpunktes, der Geschwindigkeit des Schwerpunktes, durch drei Winkel und drei Winkelgeschwindigkeiten festgelegt. Das sind also 12 Größen. Suchen Sie in der Literatur nach dem
geeigneten Zustandsraum. Hinweis: Für kleine Bewegung ist R12 sicher geeignet. Trifft dies
auch global zu ?
Aufgabe 1.7 Die Abbildung f : R2 → R2 sei gegeben durch die Beziehung
1
1
f (x1 , x2 ) = (ex cos(x2 ), ex sin(x2 )) .
Für welche (x1 , x2 ) ist diese Abbildung umkehrbar eindeutig ?
P
n
i=1
2
i
i 2
Aufgabe 1.8 Gegeben ist die Abbildung f : R → R mit f (x) =
(x ) xj .
P
Zeigen Sie, dass diese Abbildung C ∞ ist und dass die Einheitskugel ni=1 (x ) = 1 mittels
dieser Abbildung umkehrbar eindeutig auf sich selbst abgebildet wird.
n
n
j
Aufgabe 1.9 Ein bilineares System hat die Form
P
ẋ = Ax + m
j=1 (Nj x + bj ) uj
y = Cx .
bzw. mit der Einsteinschen Summenkonvention
ẋi = aij xj + nij,k xj + bik uk
y l = clj xj .
Führen Sie für obiges System eine reguläre Zustandstransformation der Form
34
1.9. Aufgaben
1. Mathematische Grundlagen
1. z = Tx bzw. z i = tij xj und
2. z = t(x) bzw. z i = ti (x)
durch und überprüfen Sie, ob das System im transformierten Zustand z wieder ein bilineares System ergibt.
Aufgabe 1.10 Die Funktion f : R2 → R3 ist durch die Gleichung
2 2 1 2
2 2
2 2
f (x1 , x2 ) = x1 x1 + x2
,x
x + x2
, x1 + x2
gegeben und M bezeichne das Bild von f . Ist mit M im Sinne der Definition 1.1 eine
Mannigfaltigkeit gegeben ? Hinweis: Zeichnen Sie diese Funktion.
Aufgabe 1.11 Gegeben ist eine unendlich oft stetig differenzierbare Funktion f : Rn →
Rm . Zeigen Sie, dass durch die Gleichung
f (x) = c ∈ Rm
eine Mannigfaltigkeit definiert ist, sofern die Jacobi-Matrix von f (x) für alle x ∈ Rn
regulär ist.
Aufgabe 1.12 Zeigen Sie, dass durch
z
−1
cos(2πt)
=
sin(2πt)
keine Karte für den gesamten Einheitskreis definiert wird.
1.9.3
Bündel
Aufgabe 1.13 Bei der Behandlung eines dynamischen Systems der Form
ẋi = f i (x, u)
mit differentialgeometrischen Methoden unterscheidet man zwischen zwei Beschreibungsformen: Der Beschreibung durch ein Vektorfeld (v = ∂t + f i ∂i ∈ Γ (T (E))) und der sogenannten dualen Beschreibung durch ein System von 1-Formen der Art
i
dx − f i (x, u) dt .
Diskutieren Sie, welche Transformationen der Art z = tz (x, u) , v = tv (x, u) die Struktur
der gewählten Darstellung nicht verändern. ( Hinweis: Berechnen Sie jeweils das transformierte System in den neuen Koordinaten)
Aufgabe 1.14 Begründen Sie die folgende Ungleichung für Schnitte σ ∈ Γ (E) der Form
f i (x, u) ∂i g ◦ σ 6= f i ◦ σ ∂i (g ◦ σ) .
35
1.9. Aufgaben
1. Mathematische Grundlagen
Aufgabe 1.15 Begründen Sie, wieso das Vektorfeld (v ∈ T (R3 ))
v = a x1 , x2 ∂1
im Bündel ((R3 , ρ31 , R1 )) mit (ρ31 : (x1 , x2 , x3 ) → (x1 )) nicht projizierbar ist, hingegen im
Bündel ((R3 , ρ32 , R2 )) mit (ρ32 : (x1 , x2 , x3 ) → (x1 , x2 )) schon.
Aufgabe 1.16 Welches der folgenden Vektorfelder
v1 = a (x1 , x2 ) ∂1
v2 = a (x1 , x2 ) ∂2 + ∂3
v3 = ∂1 + a (x1 , x2 ) ∂3
ist im Bündel ((R3 , ρ31 , R1 )) mit (ρ31 : (x1 , x2 , x3 ) → (x1 )) vertikal?
36
Kapitel 2
Eingangs/Ausgangslinearisierung
Die Methode der Eingangs/Ausgangslinearisierung ist die einfachste differentialgeometrische Methode. Um eine besonders einfache Darstellung zu erhalten, wird der Eingrößenfall
zuerst betrachtet.
2.1
Der Eingrößenfall
Gegeben sei das System
ẋi = f i (t, x, u) , i = 1, . . . , n
ṫ = 1
y = c (t, x)
(2.1)
mit einem Eingang u und einem Ausgang y. Man wählt nun die Bündel (E, π, B) mit
lokalen Koordinaten (t, xi ) für E und (t) für B, sowie (Z, ρ, E) mit lokalen Koordinaten
(t, x, u) für Z. Mit dem Vektorfeld f ∈ ρ∗ (T (E)),
f = ∂t + f i ∂i
hat man nun eine Abbildung f : C ∞ (E) → C ∞ (Z) der Art, dass f (g) für g ∈ C ∞ (E)
die Änderung von g entlang von Lösungen von f misst. Für die wiederholte Anwendung
von f schreibt man (f )k (g) mit
(f )0 (g) = g , (f )k+1 (g) = f f k (g) .
Es gelte nun
(f )i (c) = hi ∈ C ∞ (E) , i = 0, . . . , r − 1
(f )r (c) = hr ∈ C ∞ (Z) , hr ∈
/ C ∞ (E) ,
und gilt in der Umgebung eines Punktes (t, x, u) noch
∂u hr 6= 0 ,
dann kann man eine Funktion w (t, x, v) so finden, dass die Gleichung
hr (t, x, w (t, x, v)) = v
37
2.1. Der Eingrößenfall
2. Eingangs/Ausgangslinearisierung
erfüllt ist. In diesem Fall nennt man r den relativen Grad des Systems (2.1).
Mit dem Kartenwechsel ((t, z) , v) = (ϕ (t, x) , ψ (t, x, u)),
z i = hi−1 ,
i = 1, . . . , r
j
j
z = h̄ ,
j = r + 1, . . . , n
v = hr (t, x, u) ,
(2.2)
wobei die Funktionen h̄j ∈ C ∞ (E) so gewählt werden, dass ϕ ein Diffeomorphismus ist,
folgt sofort
ż i = f (hi−1 ) ◦ ϕ−1 = hi ◦ ϕ−1 = z i+1 , i = 1, . . . , r − 1
ż r = f (hr−1
) ◦ ϕ−1 = hr ◦ ϕ−1 = v
(2.3)
j
j
−1
ż = f h̄ ◦ ϕ .
Es muss noch gezeigt werden, dass tatsächlich diese Transformation ein Diffeomorphismus
ist. Das System (2.3) kann nun sehr einfach geregelt werden, z.B. mit dem Gesetz
r
X
v=−
αi−1 z i + v̄ ,
(2.4)
i=1
Pr
i
wobei p (s) =
i=0 αi s , αr = 1 ein Hurwitz Polynom ist, und v̄ einen zusätzlichen
Eingang bezeichnet. Allerdings ist die Regelung nur brauchbar, wenn das System
ż j = f h̄j ◦ ϕ−1 t, z, −αi−1 z i + v̄ , j = r + 1, . . . , n
(2.5)
mit den Eingängen z i , i = 1, . . . , r und v̄ stabil ist. Man könnte nun glauben, dass das
Gesetz (2.4) die Stabilität des Systems (2.5) beeinflusst. Betrachte man nun das System
ẋi = f i (t, x, u) , i = 1, . . . , n
v = hr (t, x, u) ,
dann folgt für das inverse System
ẋi = f i (t, x, w (t, x, v)) , i = 1, . . . , n
u = w (t, x, v) .
Der Kartenwechsel ((t, z) , v) = (ϕ (t, x) , v)
z i = hi−1 , i = 1, . . . , r
z j = h̄j , j = r + 1, . . . , n
führt zu
Das System
ż i = f (hi−1 ) ◦ ϕ−1 = hi ◦ ϕ−1 = z i+1 , i = 1, . . . , r − 1
ż r = f (hr−1
ϕ−1 = hr ◦ ϕ−1 = v
) ◦ −1
j
j
ż = f h̄ ◦ ϕ .
ż j = f h̄j ◦ ϕ−1
heißt auch die Nulldynamik des Systems (2.3), und sie ist natürlich unabhängig von (2.4),
die ja nur den Eingang betrifft.
Ein wichtiger Sonderfall ist, wenn der relative Grad r die Bedingung r = n erfüllt,
da es in diesem Fall keine Nulldynamik gibt. In diesem Fall wird das System (2.1) mit
dem Kartenwechsel (2.2) in ein lineares und zeitinvariantes übergeführt. Im Fall r ≤
n−1 spricht man von der (exakten) Eingangs-Ausgangs-Linearisierung eines nichtlinearen
Systems, im Fall r = n vom Spezialfall der Eingangs-Zustands-Linearsierung.
38
2.2. Tensor Bündel
2.2
2. Eingangs/Ausgangslinearisierung
Tensor Bündel
Es sei M eine glatte m-dimensionale Mannigfaltigkeit und T (M), T ∗ (M) das Tangentialbzw. das Kotangentialbündel. Die Schnitte v ∈ Γ (T (M)), ω ∈ Γ (T ∗ (M)) erzeugen nun
mit der Vorschrift
hω, ·i h·, vi : T (M) × T ∗ (M) → C ∞ (M)
eine bilineare Abbildung. Man führt nun das neue Symbol ⊗, das Tensorprodukt gemäß
der Beziehung
(ω ⊗ v) (·, ·) = hω, ·i h·, vi
ein. Diese Konstruktion kann direkt auf multilineare Funktionen (T (M))k ×(T ∗ (M))l →
C ∞ (M) erweitert werden.
Satz 2.1 Es sei M eine glatte m-dimensionale Mannigfaltigkeit. Die Menge
l
Tl k (M) = ∪p∈M (Tp (M))k × Tp∗ (M)
k
ist das Bündel Tl k (M) , τl,M
, M , genannt das Tensorbündel von M mit der Projektion
k
τl,M
. Die typische Faser F ist ein mk+l -dimensionaler Vektorraum.
Ein Schnitt von T0k (M) heißt kovariantes Tensorfeld, ein Schnitt von Tl 0 (M) heißt kontravariantes Tensorfeld. Außerdem
gilt T01 (M) ∼
= T ∗ (M) und T10 (M) ∼
= T (M).
k
k
Ein Schnitt Φ ∈ Γ T0 (M) , man könnte aber genauso gut T0 (M) wählen,
Φ = ⊗ki=1 ω i ,
kann gemäß der Beziehung
S (Φ) =
1 X k
⊗j=1 ω σ(j)
k! σ
symmetrisch gemacht werden, wobei σ die Permutation von (1, . . . , k) mit (1, . . . , k) →
(σ (1) , . . . , σ (k)) bezeichnet. Bezeichnet sgn (σ) das Vorzeichen der Permutation σ, dann
ist der zugehörige alternierende Tensor durch
1 X
A (Φ) =
sgn (σ) ⊗kj=1 ω σ(j)
k! σ
gegeben. Offensichtlich ist die multilineare Abbildung A (Φ) alternierend. Die symmetrischen und die alternierenden Tensoren bilden ein Unterbündel von T0k (M), die mit
S k (T ∗ (M)) bzw. mit ∧k (T ∗ (M)) bezeichnet werden. Vollkommen analoge Überlegungen gelten für Schnitte Φ ∈ Γ (Tk0 (M)), wobei für das zugehörige Bündel ∧k (T (M))
geschrieben wird.
Es gelte ϕ ∈ Γ T0k (M) , ψ ∈ Γ T0l (M) , dann kann wieder das Tensorprodukt ⊗
gemäß der Vorschrift
ϕ ⊗ ψ (v1 , . . . , vk , vk+1, . . . , vk+l ) = ϕ (v1 , . . . , vk ) ψ (vk+1 , . . . , vk+l )
mit ϕ ⊗ ψ ∈ T0k+l (M) und vi ∈ Γ (T (M)), i = 1, . . . , k + l gebildet werden. Man
kann einfach zeigen, dass die Abbildung ⊗ : T0k (M) × T0l (M) → T0k+l (M) bilinear und
assoziativ ist. Auch die folgende Definition gilt nun für alternierende Bündel ∧k (T ∗ (M))
oder ∧k (T (M)).
39
2.2. Tensor Bündel
2. Eingangs/Ausgangslinearisierung
Definition 2.1 Die Abbildung ∧ : ∧k (T ∗ (M)) × ∧l (T ∗ (M)) → ∧k+l (T ∗ (M)) mit
(k + l)!
A (ϕ ⊗ ψ)
k!l!
für ϕ ∈ Γ ∧k (T ∗ (M)) , ψ ∈ Γ ∧l (T ∗ (M)) , heißt das äußere Produkt (oder Grassmann Produkt) von ϕ und ψ.
ϕ∧ψ =
Das Grassmann Produkt oder äußere Produkt hat nun die folgenden Eigenschaften, wovon
man sich durch nachrechnen überzeugt.
Satz 2.2 Das Grassmann Produkt, siehe Definition 2.1 ist bilinear and assoziativ.
Man benutzt oft die Konvention ∧0 (T ∗ (M)) ∼
= C ∞ (M). Man beachte auch, dass die
Bündel ∧k (T ∗ (M)) mit k > m nur den Null-Schnitt als einzigen Schnitt besitzen. Man
nennt Schnitte von ∧r (T ∗ (M)) auch r-Formen. Schnitte von ∧r (T (M)) heißen auch
r-Vektoren. Wegen ∧1 (T ∗ (M)) ∼
= T ∗ (M) sind Kovektoren 1-Formen.
Die Menge aller p-Formen mit p = 1, . . . , m wird auch mit ∧ (T ∗ (M)) bezeichnet.
Auf dieser Menge gibt es nun zwei Verknüpfungen +, ∧ : ∧ (T ∗ (M)) × ∧ (T ∗ (M)) →
∧ (T ∗ (M)) so, dass damit eine Algebra definiert wird. Man nennt diese Algebra auch
äußere Algebra. Da nun für eine glatte Abbildung f : M → N mit den Mannigfaltigkeiten
M, N gilt
f ∗ (α ∧ β) = f ∗ (α) ∧ f ∗ (β)
für alle α, β ∈ Γ (∧ (T ∗ (N ))) (Bitte nachrechnen!!) folgt, dass f ∗ ein Homomorphismus
der äußeren Algebra ist.
2.2.1
Lie-Ableitungen und die Lie-Klammer
Es sei M eine glatte m-dimensionale Mannigfaltigkeit mit lokalen Koordinaten (x). Die
Lie-Ableitung einer Funktion g ∈ C ∞ (M) entlang eines Feldes v ∈ Γ (T (M)) ist
Lv (g) = v (g) .
(2.6)
Da v der infinitesimale Generator des Flusses ϕε ist, gilt
Lv (g) (p) = ∂ε g ◦ ϕε (p)|ε=0 .
(2.7)
Der Ausdruck Lv (g) (p) misst die Änderung von g an der Stelle p. Dieses geometrische
Bild erlaubt nun die Lie-Ableitung eines Feldes w ∈ Γ (T (M)) entlang eines Feldes v ∈
Γ (T (M)) mit
Lv (w) (p) = v (w) (p) = ∂ε (w ◦ ϕε (p) − ϕε,∗ (p) (w (p)))|ε=0
(2.8)
zu definieren. Man beachte den Term ϕε,∗ (p). Obwohl die Fasern Ep = π −1 (p) von T (M)
diffeomorph zur typischen Faser sind, darf man Vektoren die in verschiedenen Fasern
liegen nicht vergleichen, wie man es im Rm tut. Dies erklärt nun diesen Term. Darüber
hinaus zeigt diese Betrachtung, wie Lie-Ableitungen von Kovektoren oder Tensoren im
Prinzip zu bilden sind.
40
2.2. Tensor Bündel
2. Eingangs/Ausgangslinearisierung
Es sei f : M → N ein Diffeomorphismus zwischen M und N , dann gelten für g ∈
C ∞ (N ), v, w ∈ Γ (T (M)) die Beziehungen
v (f ∗ (g)) = f ∗ (ṽ (g)) bzw. Lv (f ∗ (g)) = f ∗ (Lṽ (g))
v]
(w) = ṽ (w̃)
bzw.
L^
v (w) = Lṽ (w̃)
(2.9)
mit f ∗ (g) = g ◦ f und ṽ = (f∗ v) ◦ f −1 . Offensichtlich ist diese Lie-Ableitung unabhängig
von den speziellen Koordinaten.
Der Kommutator oder die Lie-Klammer zweier Felder v, w ∈ Γ (T (M)) ist durch
[v, w] (g) = Lv (Lw (g)) − Lw (Lv (g))
(2.10)
mit g ∈ C ∞ (M) gegeben. Da der Fluss ϕε mit dem infinitesimalen Generator v ein lokaler
Diffeomorphismus ist, folgt
Lv (Lw (g)) − Lw (Lv (g)) = ∂ε ((w (g)) ◦ ϕε − (ϕε,∗ w) (g ◦ ϕε ))|ε=0
= ∂ε ((w ◦ ϕε ) − (ϕε,∗ w))|ε=0 (g)
= (v (w)) (g)
wegen der Gleichungen (2.7, 2.8) und damit
[v, w] = Lv (w)
(2.11)
wegen (2.10). Die Gleichung (2.11) zeigt, dass der Kommutator (2.10) wieder ein Vektorfeld auf M ist. Aus (2.10) und (2.11) folgt, dass die Lie-Klammer eine Abbildung
Γ (T (M)) × Γ (T (M)) → Γ (T (M)) ist, die die Beziehungen
a)
b)
c)
[λv, µw] = λµ [v, w] + λv (µ) w − µw (λ) v
[v, w] = − [w, v]
[u, [v, w]] + [v, [w, u]] + [w, [u, v]] = 0
(2.12)
für alle u, v, w ∈ Γ (T (M)) und λ, µ ∈ C ∞ (M) erfüllt. Die Beziehung c) heißt auch
Jacobi Identität.
Offensichtlich gibt Gleichung (2.11) eine neue Interpretation der Lie-Ableitung (2.8).
Zusätzlich findet man nun eine Darstellung von [v, w] in lokalen Koordinaten. Aus
v = v i (x) ∂i ,
und (2.11) folgt
w = w i (x) ∂i
(2.13)
[v, w] = v w i − w v i ∂i .
(2.14)
v (g) = w (g) = 0
(2.15)
Tangentialvektorfelder sind nun auch Differentialoperatoren. So beschreiben die Felder
v, w von (2.13) die beiden linearen partiellen Differentialgleichungen
in der gesuchten Funktion g ∈ C ∞ (M). Da nun auch
Lw (Lv (g)) = Lv (Lw (g)) = 0
41
2.2. Tensor Bündel
2. Eingangs/Ausgangslinearisierung
gelten muss, folgt
[v, w] (g) = 0 .
(2.16)
Man muss nun zwei Fälle unterscheiden. Gilt
[v, w] = λv + µw
(2.17)
mit λ, µ ∈ C ∞ (M), dann implizieren (2.15) die Gleichung (2.16). Ansonsten muss g noch
zusätzlich (2.16) erfüllen. Man nennt die Bedingung (2.16) auch eine Integrabilitätsbedingung für (2.15). Ist jedoch (2.17) nicht erfüllt, dann muss man weiter Integrabilitätsbedingungen suchen, indem man alle weiteren Lie-Klammern der Felder v, w, [v, w] usw.
bildet. Ein einfaches Dimensionsargument zeigt, dass Integrabilitätsbedingungen nur für
dim (M) > 2 auftreten.
Man beachte, dass die Lie-Klammer als Lie-Ableitung eines Vektorfeldes (2.8), als
Kommutator zweier Differentialoperatoren (2.11), und als Integrabilitätsbedingungen bei
Systemen von Differentialgleichungen (2.16) auftritt. Betrachtet man noch die Flüsse ϕε1 ,
ψε2 erzeugt von den Feldern v, w auf M, dann kann man untersuchen, ob
ϕε1 ◦ ψε2 = ψε2 ◦ ϕε1
(2.18)
gilt (ε1 , ε2 ) ∈ E ⊂ R2 , (0, 0) ∈ E. Berechnet man die Ableitungen nach ε1 , ε2 , dann folgt
die infinitesimale Bedingung
[v, w] = 0 .
(2.19)
Die Flüsse ϕε1 , ψε2 kommutieren genau dann, wenn die Lie-Klammer ihrer Generatoren
v, w verschwindet.
Nun verfügen wir über die Lie-Ableitung einer Funktion und eines Tangentialvektors.
Die Lie-Ableitung eines Kovektors folgt aus der Forderung
Lv (hω, wi) = hLv (ω) , wi + hω, Lv (w)i
(2.20)
für alle w ∈ Γ (T (M)). Den Ausdruck in Koordinaten erhält man mit v = v i ∂i , w = w i ∂i
und ω = ωi dxi sowie
v (ωi ) w i + ωi v w i = Lv ωi dxi , w + ωi v w i − w v i
als
Lv ωi dxi = v (ωi ) dxi + ωj ∂i v j dxi .
(2.21)
Die Definition der Lie-Ableitung einer 1-Form analog zu (2.8) wäre
Lv (ω) (p) = v (ω) (p) = ∂ε (ϕ∗ε (ϕε (p)) (ω ◦ ϕε (p)) − ω (p))|ε=0 .
Natürlich führen beide Ansätze zum selben Ergebnis.
Die Erweiterung der Lie-Ableitung auf Tensoren höherer Stufe erhält man mit der
Forderung, dass die Produktregel erfüllt ist. Z.B. für ω ∈ T01 (M), v ∈ T10 (M) folgt
Lw (ω ⊗ v) = Lw (ω) ⊗ v + ω ⊗ Lw (v) .
Diese Technik kann man natürlich geradlinig erweitern.
42
(2.22)
2.2. Tensor Bündel
2.2.2
2. Eingangs/Ausgangslinearisierung
Die äußere Ableitung
Wieder sei M eine glatte m-dimensionale Mannigfaltigkeit mit dem Tangentialbündel
T (M) und dem Kotangentialbündel T ∗ (M). Für ein Feld v ∈ Γ (T (M)) gilt offensichtlich
h·, vi : ∧1 (T ∗ (M)) → ∧0 (T ∗ (M)) = C ∞ (M) .
Die Lie-Ableitung einer p-Form ist nun eine Abbildung
Lv : ∧p (T ∗ (M)) → ∧p (T ∗ (M)) .
Zusätzlich kann man in adaptierten Koordinaten (x, ẋ) mit v = v i ∂i und f ∈ C ∞ (M) die
Lie-Ableitung in der Form
v (f ) = ∂i f v i = ∂i f dxi , v i ∂i
(2.23)
mit dem Differential, der 1-Form,
ω = ∂i f dxi
schreiben. Da nun gilt d : ∧0 (T ∗ (M)) → ∧1 (T ∗ (M)), kann man sich fragen, wie man
die Abbildung d von 0-Formen auf p-Formen, p > 1, erweitert. Mit dem speziellen I =
i1 , . . . , ip , i1 < i2 < · · · < ip kann man nun jede p-Form ω in Koordinaten in der Form
ω = ωI dxI ,
dxI = dxi1 ∧ dxi2 ∧ · · · ∧ dxip
mit ωI ∈ C ∞ (M) schreiben, wobei die Summe über alle möglichen Indizes I zu nehmen
ist. Wir erweitern nun die Abbildung d in den speziellen Koordinaten in folgender Form
dω = dωI ∧ dxI .
Dies ist bereits die gewünschte Erweiterung von d zu p-Formen, und der nachstehende
Satz zeigt, dass diese Konstruktion unabhänging von der Wahl der Koordinaten ist.
Satz 2.3 Es sei M eine glatte m-dimensionale Mannigfaltigkeit. Dann existiert eine
wohlbestimmte Abbildung d, die äußere Ableitung,
d : ∧p (T ∗ (M)) → ∧p+1 (T ∗ (M)) ,
p = 0, 1, . . . so, dass folgende Regeln für alle α ∈ Γ (∧p (T ∗ (M))), β ∈ Γ (∧q (T ∗ (M)))
gelten.
1. d (α + β) = dα + dβ.
2. d (f ), f ∈ ∧0 (T ∗ (M)) = C ∞ (M) ist das gewöhnliche Differential.
3. d (α ∧ β) = dα ∧ β + (−1)p α ∧ dβ.
4. d2 (α) = d (dα) = 0.
43
2.2. Tensor Bündel
2. Eingangs/Ausgangslinearisierung
Der Beweis erfolgt durch Überprüfung mittels eines Kartenwechsels.
Die äußere Ableitung ist nun auch mit einer Abbildung f : M → N zwischen zwei
Mannigfaltigkeiten M, N in folgender Art
df ∗ (ω) = f ∗ (dω)
für ω ∈ ∧ (T ∗ (N )) vertauschbar, wobei zu beachten ist, dass dasselbe Symbol d für die
äußere Ableitung von ∧ (T ∗ (M)) und von ∧ (T ∗ (N )) verwendet wird. Es verbleibt also
noch die Erweiterung der Abbildung h·, vi auf allgemeine p-Formen.
Satz 2.4 Es sei M eine glatte m-dimensionale Mannigfaltigkeit. Dann existiert genau
eine Abbildung iv , das innere Produkt,
i : T (M) × ∧p (T ∗ (M)) → ∧p−1 (T ∗ (M))
bzw.
iv : ∧p (T ∗ (M)) → ∧p−1 (T ∗ (M))
mit v ∈ Γ (T (M)) und p = 1, 2, . . ., die die nachstehenden Regeln erfüllt.
1. iv+w = iv + iw für v, w ∈ Γ (T (M)).
2. if v = f iv für f ∈ Γ (∧0 (T ∗ (M))).
3. iv (f ) = 0, für f ∈ Γ (∧0 (T ∗ (M))).
4. iv (ω) = hω, vi für ω ∈ Γ (∧1 (T ∗ (M))).
5. iv (ω) = ω (v, ·, . . . , ·) für ω ∈ Γ (∧p (T ∗ (M))), p > 1.
Man kann nun einfach zeigen, dass das innere Produkt noch folgendem Satz genügt.
Satz 2.5 Es sei M eine glatte m-dimensionale Mannigfaltigkeit und v ∈ Γ (T (M)). Das
innere Produkt iv : ∧p (T ∗ (M)) → ∧p−1 (T ∗ (M)) genügt der Beziehung
iv (α ∧ β) = iv (α) ∧ β + (−1)p α ∧ iv (β)
für alle α ∈ Γ (∧p (T ∗ (M))), β ∈ Γ (∧q (T ∗ (M))).
Oft wird für das innere Produkt auch das Symbol ⌋ gemäß der Vereinbarung
iv (α) = v⌋α
(2.24)
geschrieben. Darüberhinaus kann man nun die Erweiterung von (2.23) auf allgemeine
p-Formen gemäß der Beziehung
v (ω) = d (iv (ω)) + iv (dω) = d (v⌋ω) + v⌋dω .
(2.25)
angeben, die auch Cartan’s magic formula heißt. Man könnte aus dieser Beziehung zusammen mit der Lie-Ableitung und dem inneren Produkt eine Definition der äußeren
Ableitung gewinnen (Wie könnte man das machen ?).
44
2.3. Der Eingrößenfall II
2.3
2. Eingangs/Ausgangslinearisierung
Der Eingrößenfall II
Für die Eingangs/Ausganglinearisierung im Eingrößenfall bleibt noch zu klären, wann die
Transformation Gl. 2.2 ein Diffeomorphismus ist. Es kann nun genau dann ein Diffeomorphismus der Transformation Gl. 2.2 aufgebaut werden, wenn
dt ∧
^r−1
i=0
dhi = dt ∧
^r−1
i=0
df i (c) = dt ∧
^r−1
i=0
f i (dc) 6= 0
(2.26)
in der Umgebung eines Punktes (t, x) ∈ E gilt. In diesem Fall kann man immer Funktionen
h̄j so finden, dass
^n
^r−1
dh̄j 6= 0
df i (c) ∧
dt ∧
j=r+1
i=0
erfüllt ist. Findet man andererseits ein s < r so, dass gilt
dt ∧
^s−1
i=0
df i (c) 6= 0, dt ∧
^s
i=0
df i (c) = 0 ,
in einer offenen Umgebung U ⊂ E eines Punktes (t, x) ∈ U, dann folgt
^s
^s−1
f dt ∧
df i (c) ∧ df s+1 (c) = 0 .
df i (c) = dt ∧
i=0
i=0
In diesem Fall existiert kein Regelgesetz, das zu einem linearen Eingangs/Ausgangsverhalten führt. Verschwindet der Ausdruck auf einer Untermannigfaltigkeit S ⊂ E mit (t, x) ∈ E
und dim (S) < dim (E), dann existiert kein relativer Grad.
Man kann einfach das Regelgesetz (2.4) in den alten Koordinaten ausdrücken. Da das
System (2.1) relativen Grad r besitzt, folgt mit (2.2) lokal die Existenz einer Funktion w,
u = w (t, x, v)
mit
hr (t, x, w (t, x, v)) = v .
Damit erhält man sofort aber das (nichtlineare) Regelgesetz
!
r−1
X
i
u = w t, x, −
αi h + v̄
i=0
in den ursprünglichen Koordinaten.
2.4
Der Mehrgrößenfall
Nun wird das System
ẋi = f i (t, x, u) , i = 1, . . . , n
y α = cα (t, x) ,
α = 1, . . . , m
(2.27)
mit einem Eingang u ∈ Rm und einem Ausgang y ∈ Rm betrachtet. Man wählt nun
die Bündel (E, π, B) mit lokalen Koordinaten (t, xi ) für E und (t) für B, sowie (Z, ρ, E)
45
2.4. Der Mehrgrößenfall
2. Eingangs/Ausgangslinearisierung
mit lokalen Koordinaten (t, xi , uα ) für Z. Analog zum Eingrößenfall führt man noch das
Vektorfeld f ∈ ρ∗ (T (E)),
f = ∂t + f i ∂i
ein.
Es gelte nun
sowie
f iα (cα ) = hα,iα ∈ C ∞ (E) , iα = 0, . . . , rα − 1
f rα (cα ) = hα,rα ∈ C ∞ (Z) , hα,rα ∈
/ C ∞ (E) ,
∂
(2.28)
∂uα
in der Umgebung eines Punktes (t, x, u). Dann nennt man (rα ) den vektoriellen relativen
Grad und
m
X
r=
rα
det ([∂β hα,rα ]) 6= 0 , ∂α =
α=1
den relativen Grad des Systems (2.27). Wegen obiger Bedingung existieren lokal Funktionen w α so, dass
hα,rα ((t, x, w (t, x, v))) = v α
gilt.
Mit dem Kartenwechsel (t, z iα , v α ) = ϕ (t, x, u) = (t, ϕi (t, x) , ϕu (t, x, u)),
z α,iα = hα,iα −1 ,
iα = 1, . . . , rα
j
j
z = h̄ ,
j = r + 1, . . . , n
v α = hα,rα (t, x, u)
(2.29)
wobei die Funktionen h̄j , so gewählt werden, dass ϕ ein Diffeomorphismus ist, folgt sofort
ż α,iα = hα,iα ◦ ϕ−1 = z α,iα +1 , iα = 1, . . . , rα − 1
ż α,rα = hα,rα ◦ ϕ−1 = v α
ż j = f h̄j ◦ ϕ−1 .
(2.30)
Das System (2.27) kann nun wieder sehr einfach geregelt werden, zB. mit dem Gesetz
rα
X
α
αiαα −1 z α,iα + v̄ α ,
v =−
(2.31)
iα =1
Pr
wobei die Polynome pα (s) = i=0 αiα si , αrα = 1 Hurwitz Polynome sind, und v̄ α zusätzliche Eingänge bezeichnet. Die Untersuchungen betreffend die Existenz der Transformation
(2.30) unterscheiden sich nicht vom Eingrößenfall. Auch die Analyse der Nulldynamik
kann geradlinig übertragen werden. Sie ist natürlich wieder durch das Regelgesetz (2.31)
nicht beeinflussbar. Neu im Mehrgrößenfall ist, dass die Matrix (2.28), bei AI-Systemen
wird sie als Entkopplungsmatrix bezeichnet, im Allgemeinen nicht regulär ist. Dies kann
oftmals durch Vorschalten eines geeigneten dynamischen Systems erreicht werden. Da hier
dieser Fall nicht weiter untersucht wird, sei auf die Literatur verwiesen.
Ein wichtiger Sonderfall ist, wenn der relative Grad r die Bedingung r = n erfüllt, da
es in diesem Fall keine Nulldynamik gibt. In diesem Fall wird das System (2.27) mit dem
Kartenwechsel (2.29) in ein lineares und zeitinvariantes übergeführt. Man nennt dann das
System (2.30) mit verschwindender Nulldynamik auch Brunovsky Normalform.
46
2.5. Schlussbemerkungen
2.5
2. Eingangs/Ausgangslinearisierung
Schlussbemerkungen
Die Methode der Eingangs/Ausgangslinearsierung findet man z.B. in [8, 13, 17] ausführlich, wobei aber vornehmlich AI-Systeme betrachtet werden. Da sich aber die theoretischen
Überlegungen im allgemeineren Fall nicht von jenen des spezielleren unterscheiden, ist in
diesem Kapitel gleich der allgemeinere Fall behandelt worden. In der oben zitierten Literatur findet man auch den Fall einer singulären Entkopplungsmatrix und Algorithmen,
diesen Defekt zu beheben, falls dies möglich ist.
47
Kapitel 3
Erreichbarkeit und Beobachtbarkeit
Gegeben sei das System
ẋi = f i (t, x, u) , i = 1, . . . , n
ṫ = 1
y α = cα (t, x, u) , α = 1, . . . , ny
(3.1)
mit dem Eingang (uς ), ς = 1, . . . , nu und einem Ausgang y. Man wählt nun wieder die
Bündel (E, π, B) mit lokalen Koordinaten (t, xi ) für E und (t) für B, sowie (Z, ρ, E) mit
lokalen Koordinaten (t, x, u) für Z. Ebenso gilt f ∈ ρ∗ (T (E)) mit
f = ∂t + f i ∂i .
Betrachtet man nun die beiden Systeme
x̄˙ i
x̄˙ j
ṫ
yα
sowie
=
=
=
=
x̄˙ j
x̄˙ i
ṫ
yα
f i (t, x̄1 , . . . , x̄n , u) ,
f j (t, x̄m+1 , . . . , x̄n ) ,
1
cα (t, x̄1 , . . . , x̄n , u)
=
=
=
=
i = 1, . . . , m
j = m + 1, . . . , n
(3.2)
α = 1, . . . , ny
f j (t, x̄1 , . . . , x̄m , u) , j = 1, . . . , m
f i (t, x̄1 , . . . , x̄n , u) , i = m + 1, . . . , n
1
cα (t, x̄1 , . . . , x̄m , u) , α = 1, . . . , ny ,
(3.3)
dann ist einfach zu sehen, dass das System (3.2) nicht erreichbar, und dass das System
(3.3) nicht beobachtbar ist.
Es bleibt also das Problem zu lösen, ob man das System (3.1) mit der Transformation
x̄ = ϕ (t, x) ,
die weder die Zeit, Eingang oder Ausgang verändert, auf die Formen (3.2) oder (3.3)
überführen kann. Dazu werden noch einige Ergebnisse aus der Theorie der partiellen
Differentialgleichungen benötigt.
48
3.1. Distributionen und die Sätze von Frobenius
3.1
3. Erreichbarkeit und Beobachtbarkeit
Distributionen und die Sätze von Frobenius
Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M sowie ein Tangentialvektorfeld v ∈ Γ (T (M)), das den lokalen Fluss ϕε (p) erzeugt. In der Umgebung Up von p
und für ε ∈ I = (ε1 , ε2), ε1 < 0 < ε2 ist ϕε (p) ∩ Up = Sp eine reguläre 1-dimensionale
Untermannigfaltigkeit, die der Bedingung
Tϕε (p) (Sp ) = span {v (ϕε (p))}
(3.4)
genügt, wobei span {v (p)} ⊂ Tp (M) den durch v am Punkt p aufgespannten linearen
Unterraum bezeichnet. Man nennt ϕε (p) auch Integralkurve und Sp auch Integralmannigfaltigkeit von v. Man beachte, dass man ein und dieselbe Integralmannigfaltigkeit mit
verschiedenen Integralkurven beschreiben kann.
Diese Betrachtung kann nun folgendermaßen auf höher dimensionale Untermannigfaltigkeiten übertragen werden.
Definition 3.1 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen
mit ihrem Tangentialbündel T (M). Eine Vorschrift, die jedem Punkt x ∈ Up ⊂ M einer
offenen Umgebung Up des Punktes p einen linearen Vektorraum ∆x ⊂ Tx (M) zuweist,
heißt (lokale) Distribution ∆. Die Distribution ∆ heißt regulär am Punkt p, falls
dim (∆p ) = dim (∆x )
für alle x ∈ Up gilt. Die Distribution ∆ heißt glatt, wenn glatteVektorfelder vk ∈ Γ (T (M))
so existieren, dass
∆p = span {vk } , k = 1, . . . , n
gilt.
Die Übertragung des eindimensionalen Problems auf den mehrdimensionalen Fall gelingt dann folgendermaßen: Gegeben sei eine (reguläre) und (glatte) Distribution ∆,
dim (∆) = n gemäß Definition 3.1. Nun stellt man sich die Frage, ob dazu eine ndimensionale Untermannigfaltigkeit Sp so existiert, dass
Tx (Sp ) = ∆x , ∀x ∈ Up ∩ Sp
(3.5)
gilt. Falls Sp existiert, nennt man Sp eine Integralmannigfaltigkeit. Für das Weitere wird
nachfolgende Definition benötigt.
Definition 3.2 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen
mit ihrem Tangentialbündel T (M). Eine glatte Distribution ∆ heißt involutiv, falls
[vi , vj ] ∈ ∆
für alle vi , vj ∈ ∆ gilt.
Involutive und glatte Distributionen besitzen nun lokale Integralmannigfaltigkeiten.
49
3.1. Distributionen und die Sätze von Frobenius
3. Erreichbarkeit und Beobachtbarkeit
Satz 3.1 Es sei M eine glatte m-dimensionale Mannigfaltigkeit und ∆ = span {v1 , . . . , vn }
eine involutive glatte Distribution, die auf Up regulär mit dim (∆) = n ist. Dann existiert
eine n-dimensionale Integralmannigfaltigkeit Sp so, dass die Beziehung 3.5 erfüllt ist.
Weiters kann man m − n Funktionen f i+n mit
f i+n (x) = 0 ,
und
i = 1, . . . , m − n
m−n
^
i=1
finden.
df i+n 6= 0
Der Beweis dieses Satzes, er heißt auch Satz von Frobenius, erfolgt nun in zwei Schritten.
Die Distribution ∆ erfülle zusätzlich noch die Bedingung
[vi , vj ] = 0 ,
(3.6)
dann kommutieren alle Flüsse ϕiεi , oder es gilt
ϕi ◦ ϕj = ϕj ◦ ϕi , i, j = 1, . . . , n .
Die Abbildung U n → M, U ⊂ R,
x = ϕ1ε1 ◦ · · · ◦ ϕnεn (p)
beschreibt damit bereits die Integralmannigfaltigkeit wegen
j+1
n
n
1
∂εj ϕjεj ◦ ϕ1ε1 ◦ · · · ϕεj−1
j−1 ◦ ϕεj+1 ◦ · · · ◦ ϕεn (p) = vj ϕε1 ◦ · · · ◦ ϕεn (p) = vj (x)
in parametrisierter Form. Ist nun die Beziehung (3.6) nicht erfüllt, sondern es gilt
[vi , vj ] = λkij vk , k = 1, . . . , n ,
dann existiert eine lineare Transformation
wi = aji vj
so, dass
wij = δji
gilt. Nun gilt aber
δll̄ [wi , wj ]l = δll̄ λkij wkl
0 = λkij ,
und die Distribution span {w1 , . . . , wn } erfüllt (3.6). Damit ist aber bereits der erste Teil
des Satzes 3.1 gezeigt. Der Beweis des zweiten Teils erfolgt später.
Das folgende Theorem ist noch die Verallgemeinerung des Flow Box Theorems.
50
3.1. Distributionen und die Sätze von Frobenius
3. Erreichbarkeit und Beobachtbarkeit
Satz 3.2 Es seien ϕiεi : I × M → M, i = 1, . . . , n (lokale) glatte Flüsse auf einer mdimensionalen glatten Mannigfaltigkeit M. Die Umgebung Up von p ∈ M gehöre zur
Definitionsmenge von ϕi , und es gelte ϕi ◦ ϕj = ϕj ◦ ϕi , i, j = 1, . . . , n. Dann existieren
Koordinaten (x) = (x1 , . . . , xn ) nahe p so, dass ϕε = ϕ1ε1 ◦ · · · ◦ ϕnεn , ε = ε1 , . . . , εn in
diesen Koordinaten durch
ϕ̄ε = x1 + ε1 , . . . , xn + εn , xn+1 , . . . , xm
gegeben ist.
Zum Beweis des Satzes 3.2 wähle man Koordinaten (y) so, dass die Darstellung ϕ̃ε von
ϕε der Bedingungen
!
∂
0 = ψ (p) , rank
ϕ̃ε (y)
=n
∂ε
ε=0,y=0
genügt, was immer möglich ist. Man überzeugt sich nun wieder leicht, dass die Abbildung
f,
y = f (x) = ϕ̃x1 ,...,xn 0, . . . , 0, xn+1, . . . , xm
ein Diffeomorphismus ist, und dass ϕε in diesen Koordinaten das Aussehen
ϕε (x) = f −1 ◦ ϕ̃ε ◦ f (x)
= f −1 ◦ ϕ̃ε1 +x1 ,...,εn+xn 0, . . . , 0, xn+1 , . . . , xm
= ε1 + x1 , . . . , εn + xn , xn+1 , . . . , xm
hat.
Falls eine Distribution ∆ nicht involutiv ist, kann man einfach die involutive Hülle
¯
∆ von ∆, die bezüglich der Dimension kleinste involutive Distribution, konstruieren, die
¯ erfüllt. Mit der Abkürzung
∆⊂∆
[∆, ∆] = span {[vi , vj ]} , vi , vj ∈ ∆
liefert die Vorschrift
∆0 = ∆ , ∆k+1 = ∆k + [∆k , ∆k ]
(3.7)
¯ = ∆k , falls k der Bedingung
die involutive Hülle ∆
∆k−1 ⊂ ∆k , ∆k = ∆k+1
genügt.
Es gibt nun auch eine sogenannte duale Version der Definition 3.1. Dazu nachstehende
Definition.
Definition 3.3 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen
mit ihrem Kotangentialbündel T ∗ (M). Eine Vorschrift, die jedem Punkt x ∈ Up ⊂ M
einer offenen Umgebung Up des Punktes p einen linearen Vektorraum ∆∗x ⊂ Tx∗ (M)
51
3.1. Distributionen und die Sätze von Frobenius
3. Erreichbarkeit und Beobachtbarkeit
zuweist, heißt (lokale) Kodistribution ∆∗ . Die Kodistribution ∆∗ heißt regulär am Punkt
p, falls
dim ∆∗p = dim (∆∗x )
für alle x ∈ Up gilt. Die Kodistribution ∆∗ heißt glatt, wenn Kovektorfelder ω k ∈
Γ (T ∗ (M)) so existieren, dass
∆∗p = span ω k , k = 1, . . . , n
gilt.
Für das Weitere von Bedeutung sind Distributionen und Kodistributionen, wie sie nachstehend definiert werden.
Definition 3.4 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen
mit ihrem Tangential- und Kotangentialbündel T (M), T ∗ (M). Der Annihilator einer
regulären Distribution ∆ (Kodistribution ∆∗ ) ist jene bezüglich der Dimension maximale
Kodistribution ∆∗ (maximale Distribution ∆), die für alle ω ∈ ∆∗ , (v ∈ ∆) die Bedingung
hω, vi = 0 , ∀v ∈ ∆,
erfüllt.
Da nun ∆p = span {v1 (p) , . . . , vn (p)}, (∆∗p = span {ω 1 (p) , . . . , ω n (p)}) mit dim (∆p ) = n
(dim ∆∗p = n) gilt, dann folgt für ∆∗ = span {ω n+1, . . . , ω m } (∆ = span {vn+1 , . . . , vm })
mit dim ∆∗p = m − n, (dim (∆p ) = m − n). Der Annihilator einer Distribution ∆
(Kodistribution ∆∗ ) wird oftmals mit ∆⊥ , (∆∗,⊥ = (∆∗ )⊥ ) bezeichnet. Von besonderem
Interesse sind involutive Kodistributionen.
Definition 3.5 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen
mit ihrem Kotangentialbündel T ∗ (M). Eine reguläre Kodistribution ∆∗ heißt involutiv,
falls ihr Annihilator (∆∗ )⊥ involutiv ist.
Mit Hilfe der Beziehung
dω (v, w) = v (hω, wi) − w (hω, vi) − hω, [v, w]i
(3.8)
zeigt man nun einfach den nachstehenden Satz.
Satz 3.3 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen mit
kih
∗
∗
rem Kotangentialbündel T (M). Eine glatte und reguläre Kodistribution ∆ = span ω ,
k = n + 1, . . . , m mit dim (∆∗ ) = m − n ist genau dann involutiv, wenn 1-Formen αji so
existieren, dass
dω i = αji ∧ ω j , i, j = n + 1, . . . , m
gilt.
52
3.2. Beobachtbarkeit
3. Erreichbarkeit und Beobachtbarkeit
Wegen Definition 3.5 und Gl. 3.8 folgt
dω (v, w) = 0 , ∀v, w ∈ (∆∗ )⊥ .
Damit folgt aber schon Satz 3.3, da eine Basis des linearen Teilraums aller 2-Formen
Ω ∈ ∧2 Tp∗ (M) , für den gilt
Ω (v, w) = 0 , ∀v, w ∈ ∆∗p
⊥
,
durch αji ∧ ω j mit beliebigen 1-Formen gegeben ist. Naheliegend, aber wert zu zeigen, ist
der folgende Satz.
Satz 3.4 Gegeben sei eine m-dimensionale glatte Mannigfaltigkeit M zusammen mit ihrem Kotangentialbündel
T ∗ (M) und eine involutive und reguläre Kodistribution ∆∗ =
k
span ω , k = n + 1, . . . , m mit dim ∆∗p = m − n. Dann existieren m − n Funktionen
f i in der Nähe von p so, dass
∆∗ = span df n+1 , . . . , df m
gilt.
Wegen Satz 3.2 hat der Annihilator (∆∗ )⊥ von ∆∗ in den speziellen Koordinaten die Form
(∆∗ )⊥ = span {∂i } , i = 1, . . . , n .
⊥
∗ ⊥
Mit (∆ )
= ∆∗ und
⊥
(∆∗ )⊥
= span dy i , i = n + 1, . . . , m
folgt sofort Satz 3.4. Dieser Satz heißt ebenfalls Satz von Frobenius. Damit ist auch der
zweite Teil von Satz 3.1 gezeigt.
Abschließend soll noch die duale Version zu Gl. 3.7 hergeleitet werden. Mit ∆⊥
k folgt
aus
⊥
∆⊥
k+1 = (∆k + [∆k , ∆k ])
wegen Gl. 3.8 sofort
⊥
j
1
∗
∆⊥
.
k+1 = span ω ∈ ∆k | dω = αj ∧ ω , αj ∈ Γ ∧ (T (M))
Mit dieser Vorschrift kann man ebenfalls die involutive Hülle zu einer Kodistribution
berechnen.
3.2
Beobachtbarkeit
Betrachtet wird wieder das System
ẋi = f i (t, x, u)
ṫ = 1
α
y = cα (t, x, u)
53
(3.9)
3.2. Beobachtbarkeit
3. Erreichbarkeit und Beobachtbarkeit
π
definiert auf dem Bündel E → B mit den Koordinaten (t), (t, xi ), i = 1, . . . , n für B,
ρ
E und t, xi , ṫ, ẋi , für T (E). Ein Regelgesetz ist dann ein Schnitt σ von Z → E mit
den Koordinaten (t, xi , uς ), ς = 1, . . . , m für Z. Für die Funktionen cα der Ausgänge (y α ),
α = 1, . . . , ny gelte ohne Einschränkung der Allgemeinheit, dass sie funktional unabhängig
sind. Man wählt nun einen Zeitpunkt t1 ∈ R, ein hinreichend kleines Intervall T = [t1 , t2 ),
t2 > t1 und einen Schnitt σ ∈ Γ (Z), wobei γ ∈ Γ (E) eine Lösung von (3.9) für u = σ ◦ γ
ist, bzw. es gilt
∂t x ◦ γ (t) = f ◦ σ ◦ γ (t)
(3.10)
y (t)
= c ◦ σ ◦ γ (t) .
Definition 3.6 Das System (3.9) heißt (lokal) beobachtbar entlang einer Trajektorie γ,
siehe (3.10), falls man x ◦ γ (t1 ) aus der Kenntnis des Systems (3.9) und von y (t) =
c ◦ σ ◦ γ (t), u (t) = σ ◦ γ (t), t ∈ T eindeutig bestimmen kann.
Mit f = ∂t + (f i ◦ σ) ∂i ∈ T (E) gilt nun
y α (t) = cα ◦ σ ◦ γ
∂t y α (t) = f (cα ◦ σ) ◦ γ
..
.
∂tlα −1 y α (t) = f lα −1 (cα ◦ σ) ◦ γ .
Gelingt es, ein Gleichungssystem
y 1 (t) =
..
.
l1 −1 1
∂t y (t) =
..
.
ny
y (t) =
..
.
lny −1 ny
∂t
y (t) =
c1 ◦ σ (t, x)
f l1 −1 c1 ◦ σ (t, x)
cny ◦ σ (t, x)
f lny −1 (cny ◦ σ (t, x))
P y
lα = n funktional unabhängigen rechten Seiten zu konstruieren, dann ist wegen
mit nα=1
Satz 4.10 der Zustand x lokal bestimmbar.
Zur weiteren Untersuchung werden die Kodistributionen
kα
α
∆∗,k
= span df i (cα ◦ σ) i=0 ,
α
ny
M
kα i
α
∗
(3.11)
span df (c ◦ σ) i=0
∆ k1 , . . . , kny = span ({dt}) ⊕
α=1
und die daraus abgeleiteten Formen
Ωα (kα ) =
k^
α −1
l=0
Ω k1 , . . . , kny = dt ∧
54
df l (cα ◦ σ)
ny
^
α=1
Ωα
3.2. Beobachtbarkeit
3. Erreichbarkeit und Beobachtbarkeit
eingeführt. Wieder gelte, dass die Funktionen cα ◦ σ funktional unabhängig sind. Sind die
Beziehungen
Ω k1 , . . . , kny ∧ df kα (cα ◦ σ) = 0 , α = 1, . . . , ny
auf einer offenen Umgebung von (t, x) erfüllt, dann sind die Funktionen f kα (cα ◦ σ), α =
1, . . . , ny funktional abhängig. Die Rechnung
f Ω ∧ df kα (cα ◦ σ) = f (Ω) ∧ df kα (cα ◦ σ) +Ω ∧ df kα +1 (cα ◦ σ)
|
{z
}
=0
(warum?) zeigt dann die funktionale Abhängigkeit der Funktionen f kα +k (cα ◦ σ), k ≥ 0.
Damit bringt das weitere Differenzieren
der Ausgänge keine neue Information mehr. Es
∗
bezeichne von nun an
∆ l1 , . . . , lny obige Kodistribution maximaler Dimension. Gilt nun
dim ∆∗ l1 , . . . , lny = n + 1, dann ist obiges Gleichungssystem lokal nach x auflösbar.
Aus diesen Überlegungen folgt nun unmittelbar der folgende Satz.
entlang der Trajektorie γ, wenn es ein
Satz 3.5 Das System (3.9) ist lokal beobachtbar
∗
t ∈ T so gibt, dass dim ∆ l1 , . . . , lny = n + 1 am Punkt γ (t) gilt.
Dieser Satz kann noch verschärft werden.
Satz 3.6 Für das System (3.9) gelte, die Kodistribution ∆∗ l1 , . . . , lny sei regulär entlang der Trajektorie γ. Das System (3.9)
ist genau dann lokal beobachtbar entlang der
Trajektorie γ, wenn dim ∆∗ l1 , . . . , lny = n + 1 auf γ gilt.
= s+
Um diesen Satz zu zeigen, muss man nur mehr den Fall dim ∆∗ l1 , . . . , lny
∗
1 < n + 1 betrachten. Die Kodistribution ∆ l1 , . . . , lny ist definitionsgemäß regulär
und involutiv. Daher existiert eine Basis des (n − s)-dimensionalen Annihilators ∆ =
⊥
= span ({vi }), i = s + 1, . . . , n so, dass für deren Elemente [vi , vj ] = 0
∆∗ l1 , . . . , lny
gilt. Nun betrachte man die Koordinatentransformation (t, x) = φ (t, x̄),
(t, x) = ϕx̄s+1 ◦ · · · ◦ ϕx̄n ◦ ψ t, x̄1 , . . . , x̄s .
Der vom Feld vi , i = s + 1, . . . , n erzeugte (vertikale) Fluss wird mit ϕx̄i bezeichnet. Die
Menge ψ (t, x̄1 , . . . , x̄s ) sei eine reguläre Untermannigfaltigkeit
U ⊂ X mit vi 6∈ T (U).
j
∗
Man beachte, dass für ω ∈ ∆ l1 , . . . , lny gilt
vi ω j ∈ ∆∗ ,
und zusätzlich vi (ω j ) = 0, falls dω = 0 gilt. Aus der Beziehung
0 = f vi ⌋ω j = [f, vi ]⌋ω j + vi ⌋f ω j ,
folgt
[f, vi ] ∈ ∆ .
Offensichtlich erfüllen die Funktionen f l (cα ◦ σ) ◦ φ, l = 0, 1 . . . die Beziehungen
∂ī f l (cα ◦ σ) ◦ φ = φ∗ (vi ⌋df (cα ◦ σ)) = 0 .
55
3.2. Beobachtbarkeit
3. Erreichbarkeit und Beobachtbarkeit
Das transformierte System hat die Gestalt
˙x̄ī = ∂t φ̄ī ◦ σ + ∂k φ̄ī f k ◦ σ ◦ φ
ṫ = 1
y = φ∗ (cα ◦ σ) ,
α
wobei (t, x̄) = φ̄ (t,x) die zu φ inverse Transformation bezeichnet. Weiters existiert ein
ω j ∈ ∆∗ l1 , . . . , lny , dω = 0 so, dass
j̄
j̄ k
j
¯
∂ī f = ∂ī ∂t φ̄ ◦ σ + ∂k φ̄ f ◦ σ ◦ φ
= φ∗ vi f ⌋ω j
gilt (warum?). Damit folgt aber
∂ī f¯j = φ∗ [vi , f ]⌋ω j + f ⌋vi ω j
=0
wegen oben. Also hat das transformierte System die Gestalt
x̄˙ j = f¯j t, x̄1 , . . . , x̄s , j = 1, . . . , s
x̄˙ i = f¯i t, x̄1 , . . . , x̄s , x̄s+1 , . . . , x̄n , i = s + 1, . . . , n
ṫ = 1
α
y = c̄α t, x̄1 , . . . , x̄s .
Da dieses System aber sicher nicht beobachtbar ist, ist damit Satz 3.6 gezeigt.
Der Begriff der Beobachtbarkeit entlang einer Trajektorie bezieht sich auf Eigenschaften des Systems (3.1) und einer speziellen Lösung γ und σ. Als nächstes wird nun die
lokale Beobachtbarkeit an einem Punkt untersucht.
Definition 3.7 Das System (3.9) heißt (lokal) beobachtbar in der Umgebung von (t, x),
falls es ein σ ∈ Γ (Z) so gibt, dass zu jedem ε > 0 eine Trajektorie γ (τ ), τ ∈ [t, t + ε)
existiert, entlang der das System (3.9) lokal beobachtbar ist.
Da nun der Schnitt σ nicht bekannt ist, führen wir das erweiterte Feld fe = ∂t +f i ∂i +uςi ∂ςi
ein, wobei dann alle weiteren Rechnungen auf einer Mannigfaltigkeit mit den Koordinaten
(t, xi , uςk ), i, k = 1, . . . , n erfolgen. Die Bedeutung der Koordinaten uςi zeigt die nachfolgende Rechnung
uς (t) = σ ς ◦ γ (t)
∂t uς (t) = uς1 (t) = fe (σ ς ) ◦ (γ (t) , u (t))
..
.
ς
ς
∂t uk−1 (t) = uk (t) = fek (σ ς ) ◦ (γ (t) , u (t) , . . . , uk−1 (t)) .
56
3.2. Beobachtbarkeit
3. Erreichbarkeit und Beobachtbarkeit
Mit der Abkürzung γe (t) = (γ (t) , u (t) , . . . , uk−1 (t)) folgt noch
y α (t) = cα ◦ γe
∂t y α (t) = f (cα ) ◦ γe
..
.
lα −1 α
∂t y (t) = f lα −1 (cα ) ◦ γe .
Im Prinzip kann man nun fast so vorgehen wie vorher, man muss jedoch berücksichtigen,
dass die Funktionen uςk (t) nicht bekannt sind. Dazu betrachte man die Kodistributionen
kα
α
∆∗,k
= span dfei (cα ) i=0
α
∆∗e k1 , . . . , kny = span ({dt}) ⊕ span {duςk }ς=1,...,m, k=0,...,n−1
⊕
∗
ny
M
span
α=1
dfei (cα ) i=0,...,kα
(3.12)
Wieder bezeichne ∆ l1 , . . . , l
ny obige Distribution maximaler Dimension. Ist nun die
∗
Beziehung dim ∆ l1 , . . . , lny = n + 1 + m · n erfüllt, dann gibt es Werte uςk = uςk (t)
zum Zeitpunkt t so, dass das Gleichungssystem
y 1 (t) =
..
.
l1 −1 1
∂t y (t) =
..
.
y ny (t) =
..
.
lny −1 ny
∂t
y (t) =
c1 (t, x, u)
fel1 −1 c1 (t, x, u)
cny (t, x, u)
lny −1
fe
(cny (t, x, u))
wegen des Satzes 4.10 lokal nach x auflösbar ist. Aus diesen Überlegungen folgt nun
unmittelbar der folgende Satz.
Satz 3.7 Das System
(3.9) ist lokal beobachtbar am Punkt (t, x), wenn dort die Beziehung
∗
dim ∆e k1 , . . . , kny = n + 1 + m · n, siehe (3.12), erfüllt ist.
Auch dieser Satz kann noch verschärft werden. Man beachte, dass hier für den Annihilator
⊥
∆ = ∆∗e l1 , . . . , lny
= span ({vi }) im Allgemeinen vi 6∈ T (E) gilt, da die Komponenten der Felder auch von uςk abhängen können. Will man das vermeiden, dann beachte
man, dass wegen der Bedingung
0 = ∂ςk vi ⌋ω j = ∂ςk (vi )⌋ω j + vi ⌋∂ςk ω j ,
| {z }
=0
r
für ein ω j ∈ ∆∗e l1 , . . . , lny auch noch vi ⌋ ∂ςk (ω j ) = 0, r = 1, . . . gelten muss, damit
∂ςk (vi ) = 0 gilt. Mit dieser Überlegung und der Bezeichnung
∆∗e,u
l1 , . . . , l n y =
m X
n
X
σ=1 k=0
57
∂ςk ∆∗e,u l1 , . . . , lny
3.3. Erreichbarkeit
3. Erreichbarkeit und Beobachtbarkeit
gelangt man unmittelbar zu nachfolgendem Satz.
Satz 3.8 Für das System (3.9) gelte, die Kodistribution ∆∗e,u l1 , . . . , lny ist regulär am
⊥ = n − s > 0, dann ist das System (3.9) dort
Punkt (t, x). Gilt dim ∆∗e,u l1 , . . . , lny
nicht lokal beobachtbar. Anderenfalls ist es in der Umgebung von (t, x) lokal beobachtbar.
Auf den Beweis dieses Satzes kann hier verzichtet werden, da er fast identisch mit dem
des Satzes 3.6 ist. Schlussendlich findet man dann für das System (3.9) die Darstellung
x̄˙ j = f¯j t, x̄1 , . . . , x̄s , u
x̄˙ i = f¯i t, x̄1 , . . . , x̄s , x̄s+1 , . . . , x̄n , u
ṫ = 1
α
y = c̄α t, x̄1 , . . . , x̄s , u .
3.3
Erreichbarkeit
Die Erreichbarkeit des Systems (3.1) wird analog zur Beobachtbarkeit behandelt. Man
wählt wieder einen Zeitpunkt t1 ∈ R, ein hinreichend kleines Intervall T = [t1 , t2 ], t2 > t1
und einen Schnitt σ ∈ Γ (Z), der Gl. (3.10) erfüllt, und definiert nun die lokale Erreichbarkeit folgendermaßen.
Definition 3.8 Das System (3.9) heißt (lokal) erreichbar entlang einer Trajektorie γ,
siehe (3.10), wenn zu x ◦ γ (t2 ) eine offene Umgebung U so existiert, dass zu jedem x̂ ∈ U
eine Trajektorie γ̂ so existiert, dass x ◦ γ (t1 ) = x ◦ γ̂ (t1 ), x̂ = x ◦ γ̂ (t2 ) gilt.
Für das Weitere benötigt man nun eine Regularitätsannahme. Es wird angenommen, dass
um γ (t), t ∈ (t1 , t2 ) eine offene Umgebung Uγ so existiert, dass bei beschränktem Eingang
durch jeden Punkt dieser Menge eine Trajektorie verläuft und in dieser Menge verbleibt.
Will man nun überprüfen, ob das System (3.1) obige Eigenschaft hat, muss man ein nichtlineares Zweipunkt-Randwertproblem lösen. Mit Hilfe des Satzes 4.12 könnte man nun
einen Test für das linearisierte System konstruieren. Der Nachteil dieser Vorgehensweise
ist aber, dass Satz 4.12 nur hinreichend ist. Daher wird eine andere Methode benötigt,
und wir deformieren die Trajektorie γ mittels einer Abbildung, einem Fluss ϕ,
t=t
xi = ϕiε (t, x, u)
uς = ϕςε (t, x, u) ,
(3.13)
für dessen infinitesimalen Generator v = v i ∂i + v ς ∂ς gilt v ∈ T (Z). Nun betrachte man
die Menge aller Abbildungen ϕ. Da ϕ Trajektorien auf Trajektorien abbildet, muss ϕiε
unabhängig von u sein. Zwei Trajektorien γ, γ̂ werden nun als äquivalent angesehen,
wenn γ̂ i = ϕiε ◦ γ für ein ϕε gilt. Dadurch wird eine Äquivalenzrelation R auf Uγ ⊂ E
eingeführt, wobei [γ] die Äquivalenzklasse von γ und E/R den Quotienten bezeichnen.
Offensichtlich ist das System (3.9) genau dann lokal erreichbar entlang γ, wenn [γ] (t2 )
eine offene Umgebung von x̂ beinhaltet. Wir nehmen nun an, dass die Äquivalenzklassen
58
3.3. Erreichbarkeit
3. Erreichbarkeit und Beobachtbarkeit
[γ] lokal reguläre Untermannigfaltigkeiten von Uγ bilden (Dies muss nachgewiesen werden,
siehe den Abschnitt Aufgaben). In diesem Fall gibt es aber Funktionen g ∈ C ∞ (E) so,
dass
bzw. lokal
g ◦ ρ ◦ ϕε = 0
(3.14)
v i ∂i g = 0
∂ς g = 0
(3.15)
gilt. Es verbleibt nun die Aufgabe, diese Funktionen zu bestimmen.
Da die Abbildung (3.13) Trajektorien auf Trajektorien abbilden muss, gilt
∂t ϕiε ◦ σ ◦ γ (t) = f i ◦ ϕε ◦ σ ◦ γ (t)
bzw.
und für ε → 0
∂ε ∂t ϕiε ◦ σ ◦ γ (t) = ∂ε f i ◦ ϕε ◦ σ ◦ γ (t)
∂t v i ◦ ϕε ◦ σ ◦ γ (t) = ∂j f i v j + ∂ς f i v ς ◦ ϕε ◦ σ ◦ γ (t)
f v i = ∂j f i v j + ∂ς f i v ς
mit f = ∂t + f i ∂i , wobei diese Beziehung wieder entlang von (beliebigen) Trajektorien γ
auszuwerten ist. Aus
(∂i g) f v i = ∂i g ∂j f i v j + ∂ς f i v ς
f ∂i gv i −v i f (∂i g) = ∂i g∂j f i v j + ∂i g∂ς f i v ς
| {z }
=0
folgt nun wegen (3.15)
v i f (∂i g) + (∂j g) ∂i f j + v ς ∂i g∂ς f i = 0 .
Weil diese Gleichung aber für beliebige Trajektorien und deren Deformationen und damit
für beliebige v i , v τ halten muss, folgt
∂i g∂ς f i = 0
f (∂i g) = −∂j g∂i f j .
Da (3.16) nun ebenfalls entlang beliebiger Trajektorien gilt, folgt
f ∂i g∂ς f i = 0
f (∂i g) ∂ς f i + ∂i gf ∂ς f i = 0
∂i g f ∂ς f i − ∂ς f k ∂k f i = 0
∂i g [f, [∂ς , f ]]i = 0 ,
59
(3.16)
(3.17)
3.3. Erreichbarkeit
3. Erreichbarkeit und Beobachtbarkeit
wobei (3.17) und die Beziehung [∂ς , f ] = ∂ς f k ∂k benutzt wurden. Mit der Abkürzung
folgt nun
ad0v (w) = w
l
adl+1
v (w) = v, adv (w)
dg, ad0f (∂ς ) = 0
dg, ad1f (∂ς ) = 0 .
Da nun diese Beziehungen wieder entlang von Trajektorien halten müssen, folgt
dg, adkf (∂τ ) = 0 , k = 0, 1, . . . .
Da eine Funktion g nur existieren kann, wenn die Distribution
∆l =
l
X
span
k=0
m adkf (∂ς ) ς=1
involutiv ist, wird mit
f, ∆l ⊂ ∆l
(3.18)
der bezüglich l kleinste involutive Abschluss der Distribution ∆l bezeichnet, die obiger
Bedingung genügt. Damit kommt man direkt zum nachstehenden Satz.
Satz 3.9 Das System (3.9) ist (lokal)
erreichbar entlang einer Trajektorie γ, wenn ein
t ∈ T so existiert, dass gilt dim ∆l ◦ σ ◦ γ (t) = n + m.
Zum Beweis diese Satzes beachte man nur, dass ein ε > 0 so existiert, dass die Menge
[γ] (τ ), t − ε < τ < t + ε eine offene Teilmenge von E ist. Damit kann man aber auf dieser
Menge die Trajektorie entsprechend deformieren. Durch geeignetes Zusammensetzten von
Trajektorien erhält man dann die gewünschte Eigenschaft.
Satz 3.10 Für das System (3.9) gelte, die Distribution ∆l sei regulär entlang der Trajektorie γ. Das System
(3.9) ist genau dann (lokal) erreichbar entlang einer Trajektorie
γ, wenn dim ∆l ◦ σ ◦ γ (t) = n + m gilt.
Um diesen Satz zu zeigen, muss man nur mehr den Fall dim ∆l ◦σ◦γ (t) = s+m < n+m
untersuchen. Wir führen nun die Koordinatentransformation x = φ (t, x), t = t mit
xi = φi (t, x) ,
i = 1, . . . , s
xj = φj (t, x) ,
j̄ = s + 1, . . . , n
durch, wobei dφj̄ , dt ein Annihilator von ∆l ist. Mit
D
E
j
ẋ = dφj , f ◦ φ−1
60
3.4. Eingangs/Zustandslinearisierung
3. Erreichbarkeit und Beobachtbarkeit
und
D
E D
E
∂ς dφj , f = dφj , [∂ς , f ]
=0
sowie
∂i
E
D
E
D
◦ φ−1
dφj , f ◦ φ−1 = vī dφj , f
=0
wegen vi ∈ ∆l folgt aber, dass man das System (3.9) in der Form
i
i
j
j
ẋ = f
ẋ = f
ṫ = 1
t, x, u ,
i = 1, . . . , s
t, xs+1 , . . . , xn , j̄ = s + 1, . . . , n
(3.19)
schreiben kann. Damit ist der Satz 3.10 aber gezeigt. Als direkte Konsequenz dieser Überlegungen erhält man noch den folgenden Satz.
Satz 3.11 Für das System (3.9) gelte, die Distribution ∆l sei am Punkt (t, x) regulär,
dann kann es in der Form (3.19) geschrieben werden.
Der Beweis folgt nun direkt mit obiger Transformation.
3.4
Eingangs/Zustandslinearisierung mit statischer Rückführung
Gegeben sei wieder das System
ṫ = 1
ẋi = f i (t, x, u) ,
i = 1, . . . , n
(3.20)
mit n-dimensionalem Zustand x und m-dimensionalem Eingang (uς ), ς = 1, . . . , m. Es
stellt sich nun die Frage, ob man dieses System durch Zustands- und Stellgrößentransformationen
t=t
xi = ϕi (t, x)
uς = φς (t, x, u)
(3.21)
ṫ = 1
ī
ẋ = Aij xj + Bςi uς
(3.22)
in ein lineares System
überführen kann. Um die Anzahl der Fallunterscheidungen möglichst gering zu halten,
wird angenommen, dass alle im Weiteren vorkommenden Distributionen an den betrachteten Punkten regulär sind. Als Erstes wird nun der Eingrößenfall untersucht.
61
3.4. Eingangs/Zustandslinearisierung
3.4.1
3. Erreichbarkeit und Beobachtbarkeit
Der Eingrößenfall
Ohne Einschränkung der Allgemeinheit wird angenommen, dass das lineare System (3.22)
in Brunovsky Normalform
ṫ = 1
i
ī
ẋ = f = xi+1 ,
n
n
ẋ = f = u
i = 1, . . . , n − 1
(3.23)
mit n = n vorliegt. Nun folgt
x1 = ϕ1 (t, x)
f x1 = x2̄ = ϕ2 (t, x) = f ϕ1 (t, x)
..
.
n−1
1
n̄
f
x = x = ϕn (t, x) = f n−1 ϕ1 (t, x)
i
mit f = ∂t + f i ∂i , f = ∂t + f ∂i . Weiters muss gelten
∂u f j ϕ1
= 0 , j = 0, . . . , n − 1
(3.24)
für ϕ1 ∈ C ∞ (E). Man ist am Ziel, wenn man ϕ1 als Lösung obiger partieller Differentialgleichungen bestimmt hat. Offensichtlich gilt der nachfolgende Satz.
Satz 3.12 Das Eingrößensystem (3.20) ist genau dann mittels einer Transformation
(3.21) in die Brunovsky Normalform (3.23) überführbar, wenn eine Ausgangsfunktion
ϕ1 ∈ C ∞ (E) mit relativem Grad n existiert.
Im Weiteren wird nun versucht, das System partieller Differentialgleichungen (3.24) so zu
vereinfachen, dass nur mehr Differentialgleichungen ersten Grades auftreten. Die Funktionen ϕj̄ , j̄ = 1, . . . , n genügen offensichtlich den Bedingungen
∂u ϕj̄ = 0 .
Folglich muss die Distribution ∆0 = span ({∂u }) involutiv sein, was offensichtlich der Fall
ist. Die Funktionen ϕj̄ , j̄ = 1, . . . , n − 1 genügen noch den Bedingungen
∂u f ϕj̄ = 0 .
Kombiniert man nun diese in der Art
(f ◦ ∂u − ∂u ◦ f ) ϕj = 0 ,
dann folgt
[f, ∂u ] ϕj = adf (∂u ) ϕj = 0
62
3.4. Eingangs/Zustandslinearisierung
3. Erreichbarkeit und Beobachtbarkeit
wegen ∂u ϕj = f ◦ ∂u ϕj = 0. Dieses System von partiellen Differentialgleichungen
hat jedoch nur dann n − 1 Lösungen, wenn die Distribution ∆1 = span ({∂u , adf (∂u )})
involutiv ist. Die Funktionen ϕj̄ , j̄ = 1, . . . , n − 2 genügen noch den Bedingungen
2
∂u f ϕj̄ = 0 .
Kombiniert man nun diese wieder in der Art
j
f ◦ (f ◦ ∂u − ∂u ◦ f ) − (f ◦ ∂u − ∂u ◦ f ) ◦f ϕ = 0 ,
{z
} |
{z
}
|
[f,∂u ]
dann folgt
[f,∂u ]
[f, [f, ∂u ]] ϕ1 = ad2f (∂u ) ϕj = 0
wegen [f, ∂u ] ϕj = f ◦ [f, ∂u ] ϕj = 0. Dieses System von partiellen Differentialgleichung hat jedoch nur dann n − 2 Lösungen, wenn die Distribution
∆1 = span ∂u , adf (∂u ) , ad2f (∂u )
involutiv ist. Durch Wiederholung dieses Verfahrens kommt man nun einfach zum Ziel,
wobei es zweckmäßig ist nachfolgende Abkürzung einzuführen
∆l =
l
X
i
adf (∂u ) .
span
i=0
(3.25)
Damit aber auch die entsprechende Stellgrößentransformation
existiert, muss das System
(3.20) lokal erreichbar sein, d.h. es gilt dim ∆n = n + 1. Damit kommt man aber zum
nachstehenden Satz.
Satz 3.13 Das Eingrößensystem (3.20) ist genau dann mittels einer Transformation
(3.21) in Brunovsky Normalform (3.23) überführbar, wenn die Distributionen ∆l , l =
0, . . . , n − 1 mit dim (∆l ) = l + 1 involutiv sind, und dim (∆n ) = n + 1 gilt.
Zum Beweis dieses Satzes beachte man vorerst, dass er trivialer Weise notwendig für die
Existenz einer Lösung ϕ1 des Systems (3.24) ist. Ist nun ϕ1 eine Lösung des Systems
g ϕ1 = 0 , g ∈ ∆n−1 ,
i
1
dann folgt sofort, dass die Funktionen f ϕ wegen der Konstruktion auch Lösungen
der Systeme
g f i ϕ1
= 0 , g ∈ ∆n−1−i , j = 0, . . . , i , i = 0, . . . , n − 1
sind. Damit ist aber ϕ1 auch Lösung von (3.24). Die Bedingung dim (∆n ) = n+1 garantiert
dann noch die Erreichbarkeit, und gleichzeitig den relativen Grad n von ϕ1 (Warum?).
63
3.4. Eingangs/Zustandslinearisierung
3.4.2
3. Erreichbarkeit und Beobachtbarkeit
Der Mehrgrößenfall
Die Untersuchung des Mehrgrößenfalles erfolgt nun analog zum Eingrößenfall. Das lineare
System (3.22) habe nun die Brunovsky Normalform
ṫ
=1
= xς¯,iς +1
= uς
ς¯,īς
ẋ
ς¯,n̄ς̄
ẋ
(3.26)
P
mit ς¯ = 1, . . . , m̄ = m, m̄
ς¯=1 n̄ς¯ = n̄ = n. Um unnötige Fallunterscheidungen zu vermeiden, wir angenommen, dass n̄ς¯ > 0 gilt. Nun folgt
xς¯,1 = ϕς¯,1 (t, x)
f xς¯,1 = xς¯,2̄ = ϕς¯,2 (t, x) = f ϕς¯,1 (t, x)
..
.
nς̄ −1
ς¯,1
ς¯,n¯ς̄
=x
f
x
= ϕς¯,nς̄ (t, x) = f n̄ς̄ −1 ϕς¯,1 (t, x)
i
mit f = ∂t + f i ∂i , f = ∂t + f ∂i . Folglich muss wieder gelten
= 0 , j = 0, . . . , n̄ς − 1 , τ̄ = 1, . . . , m̄
∂τ̄ f j ϕς¯,1
(3.27)
¯
∈ C ∞ (E). Man ist wieder am Ziel, wenn man die m̄ Funktionen ϕς¯,1 als Lösung
für ϕς,1
obiger partieller Differentialgleichungen bestimmt hat. Offensichtlich gilt der nachfolgende
Satz.
Satz 3.14 Das Mehrgrößensystem (3.20) ist genau dann mittels einer Transformation
(3.21) in die Brunovsky Normalform (3.25) überführbar, wenn m funktional unabhängige
Ausgangsfunktionen
ϕς¯,1 ∈ C ∞ (E), ς¯ = 1, . . . , m mit vektoriellen relativen Grad (n̄ς¯),
Pm
n = ς¯=1 n̄ς¯ existieren.
Im Weiteren wird man wieder versuchen, das System partieller Differentialgleichungen
(3.28) so zu vereinfachen, dass nur mehr Differentialgleichungen ersten Grades auftreten.
Man beachte aber, dass nun die Folge der Indizes (n̄ς¯) eine bedeutenden Rolle spielen
wird. Dazu führen wir die Funktion1 q,
q (l) =
m
X
ς¯=1
σ (l − n̄ς¯)
ein, wobei q (l) die Anzahl der Elemente der Folge (n̄ς¯) ist, für die l > n̄ς¯ gilt. Analog zu
(3.25) führen wir die Distributionen
∆l =
l
X
i=0
1
span
m adif (∂ς¯) ς¯=1 .
σ bezeichnet hier die Sprungfunktion mit σ (x) = 1 für x > 0 und σ(x) = 0 für x ≤ 0.
64
(3.28)
3.4. Eingangs/Zustandslinearisierung
3. Erreichbarkeit und Beobachtbarkeit
ein. Von (3.28) folgt nun, dass n Funktionen ψ j̄ , j̄ = 1, . . . , n existieren, die den Bedingungen
∂τ̄ ψ j̄ = 0 , τ̄ = 1, . . . , m̄
genügen. Folglich muss ∆0 involutiv sein, was offensichtlich der Fall ist. Man beachte,
dass hier noch keine Zuordnung der Funktionen ψ j̄ zu den Funktionen ϕς¯,i getroffen wird.
Weiters erfüllen die Funktionen ψ j̄ , j̄ = 1, . . . , q (1) noch die Bedingungen
∂τ̄ f ψ j̄ = 0 , τ̄ = 1, . . . , m̄ .
Analog zum Eingrößenfall erhält man nun die Bedingung, dass die Distribution ∆1 mit
dim (∆1 ) = m + n − q (1) involutiv sein muss. Setzt man nun dieses Verfahren fort, und
verlangt noch die offensichtliche Bedingung, das System (3.20) ist lokal erreichbar, dann
gelangt man zum nachfolgenden Satz.
Satz 3.15 Das Mehrgrößensystem (3.20) ist genau dann mittels einer Transformation
(3.21) in Brunovsky Normalform (3.23) überführbar, wenn die Distributionen
∆l , l =
0, . . . , κ − 1 mit dim (∆l ) = m + n − q (l) involutiv sind, und dim ∆κ = m + n gilt.
Der Beweis dieses Satzes ist nun ein wenig aufwendiger als der im Eingrößenfall, da man
jetzt die Zuordnung der Funktionen ψ j̄ zu den Funktionen ϕς¯,i konstruieren muss. Vorerst
beachte man wieder, dass der Satz wieder trivialer Weise
notwendig für die Existenz von
ς¯,i
⊥
Lösungen ϕ des Systems (3.28) ist. Es gelte dim ∆s1 = r1 mit s1 = κ − 1, dann gibt
es r1 funktional unabhängige Lösungen ϕςs¯11,1 , ς¯1 = 1, . . . , r1 des Systems
ς¯1 ,1
g ϕs1 = 0 , g ∈ ∆s1 .
Weiters folgt sofort, dass die Funktionen f i ϕςs¯11,1 wegen der Konstruktion auch Lösungen
der Systeme
g f j ϕςs¯11,1
= 0 , g ∈ ∆s1 −i , j = 0, . . . , i , i = 0, . . . , s1
sind. Offensichtlich
gilt bereits für den relativen Grad n̄ς¯1 = s1 und man erhält die Zuordς¯1 ,i
i−1
nung ϕ = f
ϕςs¯11,1 , i = 1, . . . , s1 . Nun suche man die Distribution ∆s2 mit größtem
Index s2 , die der Bedingung dim ∆⊥
s2 = r2 + r1 (s1 − s2 + 1), r2 > 0 genügt, denn dann
gibt es r2 funktional unabhängige Lösungen ϕςs¯22,1 des Systems
g ϕsς¯22,1 = 0 , g ∈ ∆s2 ,
s2 −s1
ς¯1 ,1
ϕs1 sind. Gemäß der Kon-
die auch funktional unabhängig von den Funktionen f
struktion folgt wieder, dass die Funktionen f i ϕςs¯22,1 auch Lösungen der Systeme
=0,
g f j ϕsς¯22,1
g ∈ ∆s2 −i ,
65
j = 0, . . . , i ,
i = 0, . . . , s2
3.5. Bemerkungen
3. Erreichbarkeit und Beobachtbarkeit
sind. Für den relativen
Grad folgt noch n̄r1 +¯ς2 = s2 , und man erhält die Zuordnung
r2 +¯
ς2 ,i
i−1
ς¯1 ,1
ϕ
=f
ϕs1 , i = 1, . . . , s2 . Führt man dieses Verfahren fort, dann erkennt man
sofort, wie man die Zuordnung der Funktionen ψ j̄ , ϕς¯,i zueinander allgemein konstruieren
muss. Damit ist aber nicht nur der Satz 3.15 gezeigt, sondern man verfügt auch über ein
Verfahren, mit dem man aus den Distributionen ∆l den relativen Grad (nς¯) erhält. Der
folgenden Satz ist somit eine unmittelbare Konsequenz dieser Tatsache.
Satz 3.16 Das Mehrgrößensystem (3.20) ist genau dann mittels einer Transformation
(3.21) in Brunovsky Normalform (3.23) überführbar, wenn die Distributionen ∆l , l =
0, . . . , κ − 1 involutiv sind, und dim (∆κ ) = m + n gilt. Den relative Grad (n̄ς¯) und die
Funktionen ϕς¯,i erhält man mittels des oben beschriebenen Verfahrens.
3.5
Bemerkungen
Für weiterführende Literatur im Bereich der nichtlinearen Regelung wird, z.B., auf [7],
[8], [9], [13], [17] verwiesen.
66
Kapitel 4
Mathematische Grundlagen
Im Kapitel werden einige Grundlagen aus der Topologie und der Differentialrechnung im
Rn sowie der Differentialgeometrie benötigt. Die folgenden Unterabschnitte sollen einige
der benötigten Grundlagen zusammengefassen.
4.1
Topologie
Hier werden einige wichtige Grundkonzepte der Topologie zusammengefasst, wie sie für
finit dimensionale Mannigfaltigkeiten von Bedeutung sind. Im Wesentlichen sind diese
Konzepte Verallgemeinerungen von offenen Mengen des Rn , sodass sie auch in anderen
Mengen von Bedeutung sind. Auf Beweise oder Herleitungen wird hier verzichtet. Diese
findet man z.B. in [11, 10, 12]. Im Weiteren werden vor Allem Notation und Begriffe der
elementaren Mengenlehre benötigt.
4.1.1
Topologische Räume
Definition 4.1 Eine Topologie T (X) auf einer Menge X ist eine Teilmenge der Potenzmenge (T (X) ⊂ P (X)) für die gilt:
1. {} , X ∈ T (X)
2. U1 , U2 ∈ T (X) ⇒ U1 ∩ U2 ∈ T (X)
3. Uα ∈ T (X) , α ∈ I für jede Indexmenge I 6= {} impliziert
Die Elemente von T (X) heißen die offenen Mengen von T (X).
S
α∈I
Uα ⊂ T (X).
Die Standardtopologie auf R ist durch die offenen Intervalle (a, b) mit a, b ∈ R, a < b
gegeben. Es wird noch gezeigt, dass die offenen Boxen eine Topologie des Rn bilden. Diese
Topologie ist die Standardtopologie des Rn . Zu jeder Menge X 6= {} kann man einfach
die triviale Topologie T (X) = {{} , X} und die diskrete Topologie T (X) = P (X) bilden.
Man überzeugt sich auch einfach durch vollständige Induktion, dass der Schnitt endlich
vieler offener Mengen eine offene Menge ist.
67
4.1. Topologie
4. Mathematische Grundlagen
Definition 4.2 Sind T (X), S (X) zwei Topologien auf X, dann heißen S (X) feiner als
T (X) und T (X) gröber als S (X), wenn T (X) ⊂ S (X) gilt.
Offensichtlich ist die triviale Topologie die gröbste und die diskrete Topologie die feinste
Topologie einer Menge X. Analog zu offenen Mengen kann man abgeschlossene Mengen
einführen.
Definition 4.3 T (X) sei eine Topologie auf X. Eine Menge A ⊂ X heißt abgeschlossen,
wenn A = X\U, U ∈ T (X) gilt. Die Menge aller abgeschlossenen Mengen wird mit C (X)
bezeichnet.
Als Beispiel betrachte man auf R die abgeschlossenen Intervalle [a, b], a, b ∈ R, a < b.
Man beachte auch, dass eine Menge sowohl offen als auch abgeschlossen sein kann. Dies
trifft z.B. immer auf {} = X\X und X = X\ {} zu.
Feststellung 4.1 Die abgeschlossenen Mengen C (X) einer Topologie T (X) auf einer
Menge X genügen den Bedingungen:
1. {} , X ∈ C (X)
2. U1 , U2 ∈ T (X) ⇒ U1 ∪ U2 ∈ C (X)
3. Uα ∈ C (X) , α ∈ I für jede Indexmenge I 6= {} impliziert
T
α∈I
Uα ⊂ T (X).
Auf einer Menge können sehr viele Topologien existieren. Oftmals kann man eine Topologie
auch mit einer viel kleineren Menge offener Mengen, nämlich einer Basis, konstruieren.
Definition 4.4 T (X) sei eine Topologie auf X. Eine Teilmenge B (X) heißt Basis von
T (X), wenn gilt:
S
1. U ∈B(X) U = X.
S
2. U1 , U2 ∈ B (X) ⇒ U1 ∩ U2 = α∈I Uα mit Uα ∈ B (X) für eine Indexmenge I.
Ist B(X) abzählbar, dann heißt B (X) eine abzählbare Basis. Wenn T (X) eine abzählbare Basis besitzt, dann sagt man T (X) erfüllt das zweite Abzählbarkeitsaxiom. Eine
Teilmenge der Potenzmenge P (X), die diese beiden Eigenschaften erfüllt erzeugt nun
genau eine Topologie auf X. Dies zeigt der folgende Satz.
Satz 4.1 Für B(X) ⊂ P (X) seien die Bedingungen von Definition 4.4 erfüllt, dann
existiert genau eine Topologie T (X), für die B (X) eine Basis ist.
Die offenen Intervalle des R bilden eine Basis der Standardtopologie. Ein zentraler Begriff ist nun der Umgebungsbegriff, mit dem man die Beziehung von Punkten zueinander
ausdrücken kann.
Definition 4.5 T (X) sei eine Topologie auf X. Eine offene Umgebung eines Punktes
x ∈ X ist eine Menge U, für die gilt U ⊂ T (X). Eine Umgebung von x ist eine Menge
M ⊂ X, die eine offene Umgebung von x enthält. Die Menge der Umgebungen von x
heißt Umgebungssystem, sie wird mit Ux bezeichnet.
68
4.1. Topologie
4. Mathematische Grundlagen
Die Mengen (x − ε, x + ε), ε ∈ R+ sind offene Umgebungen von x ∈ R. Die Mengen
[x−1, x+3) wären Umgebungen zu x. In der trivialen Topologie gibt es nur eine Umgebung,
nämlich X, während {x} eine offene Umgebung von x in der diskreten Topologie ist.
Feststellung 4.2 T (X) sei eine Topologie auf X, dann existiert eine Funktion U : X →
P (P (X)), die jedem Punkt x ∈ X sein Umgebungssystem Ux zuordnet. Es gilt:
1. V ∈ Ux ⇒ x ∈ V .
2. V1 , V2 ∈ Ux ⇒ V1 ∩ V2 ∈ Ux .
3. V ∈ Ux ⇒ ∀W, V ⊂ W ⊂ X ⇒ W ∈ Ux
4. V ∈ Ux ⇒ ∃W, W ∈ Ux ∧ y ∈ W ⇒ V ⊂ Uy .
Die offenen Mengen einer Topologie T (X) lassen sich nun einfach folgendermaßen charakterisieren. Die Menge V ⊂ X ist genau dann offen, wenn V ∈ Ux für alle x ∈ V gilt.
Man kann nun zeigen, dass nachfolgender Satz gilt:
Satz 4.2 Für eine Menge X sei eine Funktion U : X → P (P (X)) gegeben, die die
Eigenschaften 1-4 von Feststellung 4.2 erfüllt. Dann gibt es genau eine Topologie T (X)
so auf X, dass für jedes x ∈ X genau Ux das Umgebungssystem in T (X) ist.
Analog zu einer Basis für eine Topologie kann man eine Basis für ein Umgebungssystem
einführen.
Definition 4.6 T (X) sei eine Topologie auf X. Eine Menge Bx ⊂ Ux heißt Umgebungsbasis von x ∈ X, wenn zu jedem U ∈ Ux eine Menge B ∈ Bx so existiert, dass B ⊂ U
gilt. Ist Bx abzählbar, dann heißt Bx eine abzählbare Umgebungsbasis. Ist Bx abzählbar
für alle x ∈ X, dann sagt man T (X) erfüllt das erste Abzählbarkeitsaxiom.
Mit Hilfe des Umgebungsbegriffes lassen sich nun Begriffe wie innerer Punkt, Randpunkt,
etc. vom Rn für allgemein topologische Räume einführen.
Definition 4.7 T (X) sei eine Topologie auf X mit M ⊂ X und x ∈ X. Der Punkt x
heißt innerer Punkt von M, wenn gilt M ⊂ Ux . Die Menge der inneren Punkte von M,
heißt offener Kern int (M). Der Punkt x heißt äußerer Punkt von M, wenn x ein innerer
Punkt von X\M ist.
Man kann sich nun leicht überzeugen, dass nachfolgende Eigenschaften äquivalent sind.
Satz 4.3 T (X) sei eine Topologie auf X mit M, N ⊂ X. Es gilt:
1. M ∈ T (X) ⇔ M = int (M).
2. int (M) ist die größte Menge von T (X) für die gilt int (M) ⊂ M.
3. int (M) ∩ int (N) = int (M ∩ N), int (M) ∪ int (N) ⊂ int (M ∪ N).
Mit Hilfe des Umgebungsbegriffes gelangt man auch zu den nachfolgenden Verallgemeinerungen.
69
4.1. Topologie
4. Mathematische Grundlagen
Definition 4.8 T (X) sei eine Topologie auf X mit M ⊂ X und x ∈ X. Der Punkt
x heißt Berührungspunkt (Häufungspunkt), wenn für alle U ∈ Ux gilt U ∩ M 6= {}
((U ∩ M) \ {x} 6= {}). Die Menge der Berührungspunkte heißt die abgeschlossene Hülle
cl (M) von M. Die Menge der Häufungspunkte wird mit der (M) bezeichnet. Der Punkt x
heißt Randpunkt von M, wenn x Berührungspunkt von M und M\X ist. Die Menge der
Randpunkte von M wird mit bd (M) bezeichnet.
Offensichtlich gilt cl (M) = M ∪ der (M). Man überzeugt sich nun einfach, dass wieder
die folgenden Eigenschaften gelten.
Feststellung 4.3 Zwischen abgeschlossener Hülle und offenem Kern gilt
X\int (M) = cl (X\M) ,
X\cl (M) = int (X\M) .
Obige Beziehungen erlauben nun direkt aus Satz 4.3 den nachfolgenden herzuleiten.
Satz 4.4 C (X) sei eine Topologie auf X mit M, N ⊂ X. Es gilt:
1. M ∈ C (X) ⇔ M ⊂ cl (M).
2. cl (M) ist die kleinste Menge von C (X) für die gilt M ⊂ cl (M).
3. cl (M) ∪ cl (N) = cl (M ∪ N), cl (M ∩ N) ⊂ cl (M) ∩ cl (N).
Für den Rand gelten dann insbesondere die folgenden Beziehungen.
Feststellung 4.4 T (X) sei eine Topologie auf X mit M ⊂ X, dann gilt:
1. int (M) ⊂ M ⊂ cl (M)
2. bd (M) = cl (M) ∩ cl (X\M) = cl (M) ∩ (X\int (M) = cl (M) \int (M)
Insbesondere gilt bd (M) ∈ C (M).
Betrachtet man R mit der Standardtopologie, dann gilt offensichtlich cl (Q) = R sowie
der (Z) = {}. Die entsprechende Verallgemeinerung liefert die nachfolgende Definition.
Definition 4.9 T (X) sei eine Topologie auf X mit M ⊂ X. Die Menge M heißt dicht
in X, wenn gilt cl (M) = X. Gilt int (cl (M)) = {} bzw. X\cl (M) ist dicht in X, dann
heißt M nirgends dicht in X.
4.1.2
Stetigkeit
Untersucht man Abbildungen zwischen topologischen Räumen, dann wird sich die Klasse
der stetigen Abbildungen als besonders wichtige Klasse herausstellen.
Definition 4.10 T (X), T (Y ) seien Topologien auf X und Y und f : X → Y sei eine
Abbildung. Diese heißt stetig in x ∈ X, wenn gilt ∀V ∈ Uf (x) ⇒ ∃U ∈ Ux mit f (U) ⊂ V .
Die Abbildung heißt stetig, wenn f für jedes x ∈ X stetig ist.
70
4.1. Topologie
4. Mathematische Grundlagen
Von Stetigkeit kann man also nur bei Abbildungen zwischen topologischen Räumen sprechen. Da die Topologien aber oft aus dem Zusammenhang her klar sind, werden sie oft
nicht zusätzlich angegeben. Man beachte aber, dass jede Abbildung von einem diskreten
Raum in einen Raum mit beliebiger Topologie oder von einem Raum mit beliebiger Topologie in einen mit trivialer Topologie stetig ist. Man überzeugt sich ebenfalls leicht vom
nachstehenden Satz.
Satz 4.5 T (X), T (Y ), T (Z) seien Topologien auf X, Y und Z, f, g seien Abbildungen
f : X → Y , g : Y → Z. Ist f stetig in x ∈ X und g in f (x), dann ist g ◦ f stetig in x.
Für stetige Funktionen sind nachfolgende Eigenschaften äquivalent.
Satz 4.6 T (X), T (Y ) seien Topologien auf X, Y und f : X → Y sei eine stetige
Abbildung.
1. f ist stetig.
2. Für alle M ⊂ X gilt f (cl (M)) ⊂ cl (f (M)).
3. Für alle N ⊂ C (Y ) gilt f −1 (N) ∈ C (X).
4. Für alle N ⊂ T (Y ) gilt f −1 (N) ∈ T (X).
Man beachte, dass für stetige Abbildungen das Urbild einer offenen (abgeschlossenen)
Menge offen (abgeschlossen) ist, für die Bilder offener (abgeschlossener) Mengen gilt dies
jedoch keinesfalls.
Satz 4.7 T (X), T (Y ) seien Topologien auf X, Y . Die Abbildung f : X → Y heißt offen
(abgeschlossen), wenn das Bild jeder offenen (abgeschlossenen) Menge offen (abgeschlossen) ist.
Von besonderer Bedeutung sind nun bijektive Abbildungen.
Definition 4.11 T (X), T (Y ) seien Topologien auf X, Y . Die Abbildung f : X → Y
heißt ein Homöomorphismus, wenn f bijektiv ist und sowohl f als auch f −1 stetig sind.
Man nennt zwei topologische Räume homöomorph, oder topologisch äquivalent, wenn sie
durch einen Homöomorphismus verbunden sind. Da Homöomorphie eine Äquivalenzrelation ist, kann man einen topologischen Raum als Repräsentanten aller zu ihm homöomorphen Räume auffassen. Es stellt sich also die Frage, wann zwei Räume homöomorph sind.
Satz 4.8 T (X), T (Y ) seien Topologien auf X, Y . Die bijektive Abbildung f : X → Y
ist genau dann ein Homöomorphismus, wenn f stetig und offen (abgeschlossen) ist.
71
4.1. Topologie
4.1.3
4. Mathematische Grundlagen
Konvergenz und Hausdorff-Räume
Als nächstes werden Folgen untersucht, wobei konvergente Folgen von besonderem Interesse sind.
Definition 4.12 T (X) sei eine Topologie auf X. Die Folge (xn ) heißt konvergent, wenn
es einen Punkt x ∈ X so gibt, dass zu jeder Menge U ∈ Ux eine Zahl N existiert, dass
gilt xn ∈ U für n ≥ N. Man sagt auch xn konvergiert gegen den Grenzwert x.
In allgemeinen topologischen Räumen sind nun Grenzwerte von Folgen nicht eindeutig
bestimmt. Die entscheidenden Eigenschaften, dass Grenzwerte konvergenter Folgen eindeutig sind, zeigt die folgende Definition.
Definition 4.13 T (X) sei eine Topologie auf X. Der Raum X heißt ein HausdorffRaum, wenn man für alle x, y ∈ X, x 6= y Mengen U ∈ Ux , V ∈ Uy so finden kann, dass
U ∩ V = {} gilt. Der Raum X heißt regulär, wenn er ein Hausdorff-Raum ist, und es
gilt, zu jeder Menge M ∈ C (X) und jedem Punkt x ∈ X\M gibt es eine Menge U ∈ Ux
mit U ∩ M = {}. Der Raum X heißt normal, wenn er ein Hausdorff-Raum ist, und für
alle M, N ∈ C (X), M ∩ N = {} existieren Mengen U, V ∈ T (X) mit M ⊂ U, N ⊂ V ,
U ∩ V = {}.
Man kann nun einfach zeigen, dass ein normaler Raum regulär ist, sowie dass ein regulärer
Raum ein Hausdorff-Raum ist. In Hausdorff-Räumen haben nun konvergente Folgen genau
einen Grenzwert.
4.1.3.1
Teilräume, Produkt und Quotientenraum
Von Bedeutung ist ebenfalls, wie man neue topologische Räume aus gegebenen erzeugt.
Von besonderem Interesse sind hier Teilräume, Produkträume und Quotientenräume.
Definition 4.14 T (X) sei eine Topologie auf X. Die relative Topologie auf M ⊂ X ist
durch T (M) = {U ∩ M|U ∈ T (X)} gegeben.
Man beachte, dass eine offene Menge von T (M) nicht offen in T (X) sein muss. Wenn
f : X → Y eine stetige Abbildung zwischen zwei Räumen X, Y ist, dann ist die auf M ⊂
X eingeschränkte Abbildung f |M : M → Y auch stetig. Die Umkehrung gilt aber nicht.
Man beachte auch, dass in der relativen Topologie die Inklusionsabbildung i : M → X,
i (x) = x stetig ist.
Als nächstes soll das Produkt topologischer Räume betrachtet werden.
Definition 4.15 T (X), T (Y ) seien Topologien auf X, Y . Die Produkttopologie auf X ×
Y ist gegeben durch T (X × Y ) = {U × V |U ∈ T (X) , V ∈ T (Y )}. Die offenen Rechtecke
bilden also eine Basis dieser Topologie.
Feststellung 4.5 T (X), T (Y ) seien Topologien auf X, Y . Für die Produkttopologie auf
X × Y und die Projektionen pr1 (x, y) = x, pr2 (x, y) = y gilt:
1. pr1 , pr2 sind offene Abbildungen.
72
4.1. Topologie
4. Mathematische Grundlagen
2. Z sei ein topologischer Raum. Eine Abbildung f : Z → X × Y ist genau dann stetig,
wenn die Abbildungen pr1 ◦ f : Z → X, pr2 ◦ f : Z → Y stetig sind.
Mit Hilfe der Produkttopologie kann man auch überprüfen, ob ein topologischer Raum
ein Hausdorff-Raum ist.
Feststellung 4.6 Ein topologischer Raum X ist genau dann ein Hausdorff-Raum, wenn
die Diagonale ∆ = {(x, x) |x ∈ X} ⊂ X × X in der Produkttopologie eine abgeschlosse
Teilmenge ist.
Ist X ein Hausdorff-Raum, dann gibt es zu zwei Punkte x, y ∈ X, x 6= y zwei Mengen
U ∈ Ux , V ∈ Uy so, dass U ∩ V = {} gilt. Woraus folgt (U × V ) ∩ ∆ = {}. Ist ∆
abgeschlossen, dann ist X\∆ offen und zu x, y gibt es offene Umgebungen U, V mit
(U × V ) ∈ (X × X) \∆, oder es gilt U ∩ V = {}.
Mit Hilfe von Äquivalenzrelationen können ebenfalls neue Topologien erzeugt werden.
Hierzu dient die nachstehende Definition.
Definition 4.16 Eine Äquivalenzrelation R ∈ X × X auf einer Menge X erfüllt für alle
x, y, z ∈ X die Beziehungen:
1. (x, x) ∈ R, (Reflexivität)
2. (x, y) ∈ R ⇔ (y, x) ∈ R, (Symmetrie)
3. (x, y) , (y, z) ∈ R ⇒ (x, z) ∈ R, (Transitivität)
Mit [x] = {v ∈ X| (x, v) ∈ R} wird die Äquivalenzklasse von x bezeichnet, und mit X/R
die Menge aller Äquivalenzklassen. Die Abbildung π : X → X/R, x 7→ [x] heißt die
kanonische Projektion.
Man überzeugt sich leicht, dass X/R aus disjunkten Mengen besteht, deren Vereinigung
gerade X ist. Mit der Quotiententopologie macht man nun die Projektion zu einer stetigen
Abbildung.
Definition 4.17 T (X) sei eine Topologie auf X und R eine Äquivalenzrelation. Die
Quotiententopologie auf X/R ist gegeben durch {U ∈ X/R|π −1 (U) ∈ T (X)}.
Es sei f : X → Y eine surjektive Abbildung. Man erzeugt nun mittels f (x) = f (y)
sehr einfach eine Äquivalenzrelation R. Offensichtlich ist die Abbildung g : X/R → Y ,
[x] 7→ f (x) bijektiv. Wie schaut die feinste Topologie auf Y aus, in der f stetig ist?
Es stellt sich nun die Frage, wie sich die Quotiententopologie mit der Hausdorff Eigenschaft vertragt. Dazu nachstehende Definition.
Definition 4.18 Die Menge Γ = {(x, y) | (x, y) ∈ R} ⊂ X ×X eines topologischen Raumes X mit Topologie T (X) heißt der Graph von R. Die Äquivalenzrelation R heißt offen
(abgeschlossen), wenn die kanonische Projektion π offen (abgeschlossen) ist.
Es ist nun oft nötig, beurteilen zu können, ob ein Quotientenraum ein Hausdorff-Raum
ist. Dazu das folgende Ergebnis.
Feststellung 4.7 Ist X/R eine Hausdorff-Raum, dann ist der Graph Γ von R in X ×
X abgeschlossen. Ist noch R offen und Γ in X × X abgeschlossen, dann ist X/R ein
Hausdorff-Raum.
73
4.1. Topologie
4.1.4
4. Mathematische Grundlagen
Metrische Räume
Auf dem Rn ist die Standardmetrik durch
v
u n
uX
d (x, y) = t
(xi − yi )2 ,
i=1
x, y ∈ Rn
gegeben. Die Erweiterung auf allgemeinere Räume ist der folgenden Definition zu entnehmen.
Definition 4.19 Eine Metrik auf einer Menge X ist eine Abbildung d : X × X → R so,
dass für alle x, y, z ∈ R+ gilt:
1. d (x, y) = 0 ⇔ x = y, (Definitheit)
2. d(x, y) = d (y, x), (Symmetrie)
3. d(x, z) ≤ d(x, y) + d(y, z), (Dreiecksungleichung)
Mit Hilfe einer Metrik auf einer Menge kann man auf ihr eine Topologie einführen.
Definition 4.20 X sei ein metrischer Raum mit Metrik d. Die ε-Scheibe um x ist die
Menge Dε (x) = {y ∈ X|d (x, y) < ε}. Die metrische Topologie auf X ist durch alle Mengen gegeben, die sich als Vereinigung von ε-Scheiben darstellen lassen. Zwei Metriken
heißen äquivalent, wenn sie dieselbe Topologie erzeugen.
Man überzeugt sich leicht, dass eine Norm k·k auf einem linearen Raum X eine Metrik
ist mit
d (x, y) = kx − yk , x, y ∈ X
Ein wichtiges Ergebnis ist nun, dass alle Normen auf dem Rn
v
u n
uX
p
|xi |p , p ∈ [1, ∞)
kxkp = t
i=1
kxk∞ = max |xp |
1≤p≤n
mit x ∈ Rn dieselbe Topologie erzeugen.
Die nachfolgende Feststellung zeigt nun eine besondere Eigenschaft metrischer Räume.
Feststellung 4.8 Jeder metrische Raum ist normal.
Metrische Räume, die vollständig sind, haben eine besondere Bedeutung. Man überzeugt
sich nämlich leicht, dass jede konvergente Folge eine Cauchy Folge ist, die Umkehrung ist
jedoch im Allgemeinen falsch.
Definition 4.21 X sei ein metrischer Raum mit Metrik d und (un ) eine Folge in X.
Existiert zu jedem ε ∈ R+ eine Zahl N so, dass d (un , um ) < ε für alle n, m > N gilt,
dann heißt (ui ) eine Cauchy Folge. Der Raum X heißt vollständig, wenn jede Cauchy
Folge konvergiert.
74
4.1. Topologie
4. Mathematische Grundlagen
Der Rn versehen mit einer Norm ist vollständig. Dies gilt auch für jeden Unterraum des
Rn . Man beachte, dass diese Eigenschaft für nicht finit-dimensionale lineare Räume X im
Allgemeinen auch nicht zutrifft.
In einem vollständigen metrischen Raum kann man nun gewisse Gleichungen mittels
Iteration einfach lösen.
X sei ein metrischer Raum mit Metrik d mit einer Abbildung f : X → X. Gibt es
eine Zahl k, 0 ≤ k < 1 so, dass für alle x, y ∈ X gilt, dann gibt es genau ein z ∈ X, dass
f (z) = z gilt. Man nennt in diesem Fall f eine Kontraktion und z einen Fixpunkt von f .
Auf den einfachen Beweis wird hier verzichtet, er basiert auf der Konstruktion einer
geeigneten Cauchy Folge.
In metrischen Räumen kann man die Stetigkeit auch auf nachfolgende Weise einführen.
Definition 4.22 Es seien X, Y metrische Räume mit Metriken dX , dY . Die Abbildung
f : X → Y heißt stetig in x, wenn zu jedem ε > 0 ein δx (ε) > 0 so existiert, dass
dX (x, y) < ε ⇒ dY (f (x) , f (y)) < δ gilt.
Von weiterem Interesse sind nun stetige Funktionen, bei denen die Funktion δ nicht vom
betrachteten Punkt abhängt.
Definition 4.23 Es seien X, Y metrische Räume mit Metriken dX , dY . Die Abbildung
f : X → Y heißt gleichmäßig stetig in x, wenn zu jedem ε > 0 ein δ (ε) > 0 so existiert,
dass dX (x, y) < ε ⇒ dY (f (x) , f (y)) < δ gilt.
Es sei fi : S → X, i = 1, 2, . . . und f : S → X Abbildungen einer Menge S in einen
metrischen Raum mit Metrik d.Die Folge fi → f konvergiert gleichmäßig gegen f , wenn
zu jeden ε > 0 ein n so existiert, dass i ≥ n ⇒ d (fi (s) , f (s)) < ε, ∀s ∈ S.
Es stellt sich nun heraus, dass gewisse Mengen stetiger Funktionen auf metrischen Räumen
selbst wieder einen metrischen Raum bilden.
Feststellung 4.9 Es sei X ein topologischer Raum und Y ein abgeschlossener metrischer
Raum. Die Menge C (X, Y ) der beschränkten und stetigen Abbildungen X → Y ist ein
metrischer Raum mit Metrik
dX,Y (f, g) = sup d (f (x) , g (x))
x∈X
mit f, g ∈ C (X, Y ).
4.1.5
Kompaktheit
Eine stetige Funktion auf dem Intervall [0, 1] nimmt sowohl ihr Maximum als auch ihr
Minimum an. Die dafür verantwortliche Eigenschaft ist die Kompaktheit des Intervalls
[0, 1].
Definition 4.24
S X sei ein topologischer Raum. Der Raum X heißt kompakt,
S wenn jede
Überdeckung α Uα = X mit offenen Mengen Uα eine endliche Überdeckung α∈I Uα = X,
|I| < ∞ enthält. Eine Teilmenge M ⊂ X heißt kompakt, wenn M in der relativen Topologie kompakt ist. Eine Teilmenge M ⊂ X heißt relativ kompakt, wenn cl (M) kompakt
75
4.1. Topologie
4. Mathematische Grundlagen
ist. Eine Raum X heißt lokal kompakt, wenn er ein Hausdorff-Raum ist und jeder Punkt
x ∈ X eine relativ kompakte Umgebung hat.
S
Es sei [0, 1] ⊂ α Uα eine offene Überdeckung. Zu jeden Punkt x ∈ [0, 1] muss es ein α
so geben, dass x ∈ Uα gilt. Da Uα offen ist, muss gelten (x − εx , x + εx ) ⊂ Uα . Nun muss
eine Zahl ε so existieren, dass 0 < ε ≤ εx gilt, denn andernfalls gäbe es einen Punkt x
mit (x − ε, x + ε) 6⊂ Uα für alle α. Da dann auch (x − ε/n, x + ε/n) ⊂ Uα , n = 1, 2, . . .
für alle α gilt, hätte x keine offene Umgebung in R. Die entsprechende Übertragung auf
den Rn entnimmt man der folgenden Feststellung.
Feststellung 4.10 Das Produkt X × Y zweier topologischer Räume X, Y ist genau dann
kompakt, wenn X und Y kompakt sind.
Noch einfacher zeigt man nachstehende Feststellung.
Feststellung 4.11 Es gilt:
1. X sei eine kompakte Menge mit einer abgeschlossenen Teilmenge M ⊂ X, dann ist
M kompakt.
2. Die Abbildung f : X → Y sei stetig. Ist X kompakt, dann ist f (X) kompakt.
Die Umkehrung von Punkt 2 obiger Feststellung ist im Allgemeinen falsch. Dazu folgende
Definition.
Definition 4.25 Die Abbildung f : X → Y heißt eigentlich, wenn f stetig ist, und für
jede kompakte Menge M ⊂ Y folgt, f −1 (M) ist kompakt.
Nun kann man oftmals Kompaktheit auch an Hand der Konvergenz von Folgen beurteilen.
Dazu der Satz von Bolzano, Weierstrass.
Es sei X ein kompakter Hausdorff Raum, dann besitzt jede Folge eine konvergente
Teilfolge. In einem metrischen Raum gilt die Umkehrung.
Eine Eigenschaft metrischer Räume, die ebenfalls von Bedeutung ist, findet man in
der folgenden Definition.
Definition 4.26 X sei ein metrischer Raum. Eine Teilmenge M ⊂ X heißt total beschränkt, wenn zu jedem
S ε > 0 eine endliche Menge I = {p1 , . . . , pn } von Punkten pi ∈ S
so existiert, dass M ⊂ i∈I Dε (pi ) gilt.
Man erhält nun einfach das nachstehende Ergebnis.
Ein metrischer Raum ist kompakt, wenn er vollständig und total beschränkt ist. Eine
Teilmenge eines metrischen Raumes ist relativ kompakt, wenn sie beschränkt ist.
Auf den einfachen Beweis wird hier verzichtet. Ebenso einfach erhält man das folgende
Ergebnis.
Feststellung 4.12 In einem metrischen Raum sind die kompakten Mengen abgeschlossen
und total beschränkt.
Im Rn gilt noch die Umkehrung. Dies besagt der Satz von Heine und Borel.
76
4.1. Topologie
4. Mathematische Grundlagen
Satz 4.9 Im Rn sind abgeschlossene und total beschränkte Mengen kompakt.
In allgemeinen topologischen Räumen kann man bereits die Stetigkeit von Funktionen
definieren. In metrischen Räumen existieren noch nachfolgende Verfeinerungen.
Feststellung 4.13 Es seien X, Y metrische Räume, und X sei kompakt. Eine stetige
Abbildung f : X → Y ist gleichmäßig stetig.
Definition 4.27 Eine Teilmenge F ⊂ C (X, Y ) heißt gleichgradig stetig in x ∈ X, wenn
gilt, zu jedem ε > 0 gibt es ein δ > 0 so, dass gilt dX (x, y) < δ ⇒ dY (f (x) , f (y)) <
ε, ∀f ∈ F . F heißt gleichgradig stetig, wenn F in jedem Punkt x ∈ X gleichgradig stetig
ist.
Zu obiger Definition noch das folgende Ergebnis.
X sei ein kompakter metrischer Raum. Die Menge F ⊂ C (X, Rn ) ist relativ kompakt,
wenn sie gleichgradig stetig ist, und gleichmäßig beschränkt ist.
4.1.6
Zusammenhang
Auf topologischen Räumen kann man auch beurteilen, ob Mengen zusammenhängend
sind. Interessanterweise sind drei verschiedene Begriffe, Zusammenhang, wegweiser Zusammenhang und einfacher Zusammenhang von Bedeutung.
Definition 4.28 X sei ein topologischer Raum. Ein Weg c in X ist eine stetige Abbildung
c : [0, 1] → X. Gilt c (0) = x, c (1) = y, dann verbindet der Weg c die Punkte x, y. Der
Raum heißt wegweise zusammenhängend, wenn für alle x, y ∈ X gilt, dass sie durch einen
Weg verbunden werden können. Der Raum X heißt lokal wegweise zusammenhängend,
wenn jeder Punkt eine wegweise zusammenhängende Umgebung hat.
Ein einfaches Beispiel ist der Rn , er ist wegweise und lokal wegweise zusammenhängend.
Es gibt jedoch noch eine weitere Definition des Zusammenhanges.
Definition 4.29 Ein topologischer Raum X heißt zusammenhängend, wenn X und {}
die einzigen offenen und abgeschlossenen Teilmengen von X sind. Eine Teilmenge von
X heißt zusammenhängend, wenn sie in der relativen Topologie zusammenhängend ist.
Eine Komponente M von X ist eine nicht leere zusammenhängende Teilmenge von X
für die gilt, M ist die einzige zusammenhängende Teilmenge von X die M enthält. Der
Raum X heißt lokal zusammenhängend, wenn jeder Punkt eine lokal zusammenhängende
Umgebung hat.
Man kann nun einfach zusammenhängende Mengen folgendermaßen charakterisieren.
Definition 4.30 Ein topologischer Raum X ist genau dann nicht zusammenhängend,
wenn eine der folgenden Eigenschaften zutrifft.
1. X besitzt eine echte, nicht leere Teilmenge, die offen und abgeschlossen ist.
2. X ist die disjunkte Vereinigung zweier nicht leerer offener Mengen.
77
4.1. Topologie
4. Mathematische Grundlagen
3. X ist die disjunkte Vereinigung zweier nicht leerer abgeschlossener Mengen.
Stetige Abbildungen erhalten nun den Zusammenhang, denn es gilt.
Feststellung 4.14 X, Y seien topologische Räume, und f sei eine stetige Abbildung
f : X → Y . Ist X (wegweise) zusammenhängend, dann ist auch f (x) (wegweise) zusammenhängend.
Das folgende Ergebnis ist zwar nahe liegend, es verlangt aber doch einen hier nicht gezeigten Beweis.
Lemma 4.1 Die einzigen zusammenhängenden Mengen des R sind die Intervalle.
Wegweiser Zusammenhang ist nun stärker als nur Zusammenhang.
Feststellung 4.15 Ist der topologische Raum wegweise zusammenhängend, dann ist er
zusammenhängend.
Das Standardbeispiel einer zusammenhängenden aber nicht wegweise zusammenhängenden Menge ist:
1
2
(x, y) ∈ R |x > 0, −1 < y < 1, x, sin
∪ (0, y)
x
Eine partielle Umkehrung obiger Feststellung enthält das Nachfolgende.
Feststellung 4.16 Ein topologischer Raum sei zusammenhängend und lokal wegweise
zusammenhängend, dann ist er wegweise zusammenhängend. Im Besonderen gilt, dass
jeder lokal zum Rn homöomorphe Raum wegweise zusammenhängend.
Eine besonders wichtige Eigenschaft stetiger Funktionen auf zusammenhängenden Mengen
zeigt der so genannte Zwischenwertsatz.
Korollar 4.1 Es sei X ein zusammenhängender topologischer Raum und f eine stetige
Abbildung f : X → R. Für alle x, y ∈ X, f (x) < f (y) gilt, dass zu jedem a ∈ [f (x) , f (y)]
ein z ∈ X mit f (z) = a existiert.
Abschließend sollen noch einfach zusammenhängende Mengen betrachtet werden. Dazu
nachstehende Definition.
Definition 4.31 X, Y seien topologische Räume, und f , g stetige Abbildungen X → Y .
f und g heißen homotop, wenn es eine stetige Abbildung h : X × [0, 1] so gibt, dass
f (x) = h (x, 0), g (x) = h (x, 1) gilt.
Man überzeugt sich leicht, dass Homotopie eine Äquivalenzrelation ist. Zum Abschluss
noch nachstehende Definition.
Definition 4.32 Ein topologischer Raum X heißt einfach zusammenhängend, wenn jeder
geschlossene Weg c mit c (0) = c (1) = x, homotop zur konstanten Abbildung f : [0, 1] →
Y , f ([0, 1]) = {x} ist.
78
4.2. Inverse und implizite Funktion
4.2
4. Mathematische Grundlagen
Inverse und implizite Funktion
Im Folgenden werden Abbildungen vom Rn in den Rm betrachtet, wobei beide linearen
Vektorräume immer mit der Standardtopologie versehen sind. Im Weiteren werden nur
stetige Abbildungen betrachtet, dazu die nachstehende Definition. Auf Beweise oder Herleitungen der folgenden Sätze hier verzichtet, man findet diese man z.B. in [11].
Definition 4.33 Eine stetig Abbildung f : U → V (f ∈ C (U, V )) mit U ⊂ Rn und
V ⊂ Rn heißt Homeomorphismus, wenn f auf U biijektiv ist, und f sowie f −1 stetige
Abbildungen in den Standardtopologien sind.
Stetige Zustandstransformationen sind für das Weitere zu allgemein. Wir verlangen, dass
f zumindest einmal stetig differenzierbar ist. Es bezeichne Df : U × Rn → V × Rn die
Abbildung
x̄i = f i (x) , x̄˙ i = ∂j f i (x) ẋj , i = 1, . . . , n
mit (xi ), (x̄i ) als Koordinaten für U, V und (xi , ẋi ), (x̄i , x̄˙ i ) für U × Rn , V × Rn . Ist Df
ein Homeomorphismus, dann ist f offensichtlich stetig differenzierbar. Hier wird natürlich
vorausgesetzt, dass die Elemente der Jacobi Matrix [∂j f i ],
∂1 f 1 (x) ∂2 f 1 (x) · · · ∂n f 1 (x)
2
· · · ∂n f 2 (x)
i
∂1 f (x)
∂j f =
..
..
..
.
.
.
.
.
.
n
n
n
∂1 f (x) ∂2 f (x) · · · ∂n f (x)
existieren. Die nachfolgenden Sätze über die inverse und die implizite Funktion gehören
zu den wichtigsten der nichtlinearen Analysis.
Satz 4.10 Die Abbildung f : U → V (f ∈ C r (U, V )) mit offenen Teilmengen U ⊂ Rn ,
V ⊂ Rn sei r mal (r ≥ 1) stetig differenzierbar. Für ein x0 ∈ U gelte
x̄0 = f (x0 )
sowie
rank ∂j f i (x0 ) = n ,
dann existiert eine offene Umgebung U ′ ⊆ U von x0 so, dass Df auf U × Rn ein Homeomorphismus ist, und dass f −1 auf V ′ = f (U ′ ) mindestens r mal stetig differenzierbar ist
(f −1 ∈ C r (V ′ , U ′ )).
Man beachte, dass auf V ′ zwei Topologien exisitieren. Die erste ist die relative Topologie
gegeben durch V . Die zweite Topologie wird durch f erzeugt, indem als offenen Mengen
von V ′ die Bilder offener Mengen von U ′ einführt werden. Genügt f nun Satz 4.10, dann
stimmen beide Topologien überein. Der folgende Satz ist nun eine Erweiterung der vorigen.
Satz 4.11 Die Abbildung f : U × V → Rn (f ∈ C r (U × V, Rn )) mit offenen Mengen
U ⊂ Rm , V ⊂ Rn sei r mal (r ≥ 1) stetig differenzierbar. Für ein x0 ∈ U, y0 ∈ V gelte
f (x0 , y0 ) = 0
sowie
rank ∂j f i (x0 , y0) = n , ∂j = ∂yj ,
i, j = 1, . . . , n, dann eine offene Umgebung U ′ ⊆ U von x0 so, dass auf jeder zusammenhängenden Umgebung U ′′ ⊂ U ′ genau eine g ∈ C r (U ′′ , V ) mit
f (x, g (x)) = 0 .
79
4.2. Inverse und implizite Funktion
q
π
4. Mathematische Grundlagen
θ
x1
f
x2
1
Abbildung 4.1: Eine lokal aber nicht global umkehrbar eindeutige Funktion.
Man überzeugt sich leicht, dass man den Satz 4.10 aus Satz 4.11 erhält, wenn man
f (x, y) = f (x) − y = 0 ,
y = x̄
setzt. In umgekehrter Richtung benutze man die Substitution
f (x) = (x1 , f (x1 , x2 )) = y = (y1 , y2 )
und werte die Beziehung
x = (x1 , x2 ) = f −1 (y1 , y2 )
für x1 = y1 , y2 = 0 aus.
Man beachte, dass Satz 4.10 ausschließlich lokale Aussagen zulässt. Hiezu untersuche man
lediglich die Abbildung
x1 = r cos(θ)
x2 = r sin(θ)
mit der Jacobi Matrix
cos(θ) −r sin(θ)
M=
sin(θ) r cos(θ)
mit
det(M) = r .
Für 0 < r < ∞ und 0 < θ < a mit a ≤ 2π ist obige Abbildung umkehrbar eindeutig, für
a > 2π ist dies nicht mehr der Fall, obwohl die Jacobi Matrix für r 6= 0 immer regulär ist.
Bild 4.1 veranschaulicht diesen Sachverhalt.
Weiters beachte man, dass Satz 4.10 die r malige Differenzierbarkeit der Umkehrfunktion garantiert. Mit i (x) = x als identischer Abbildung und g = f −1 folgt aus
g ◦ f (x) = i (x) ,
und mit der Kettenregel
∂j g i ◦ f (x) = ∂j ii (x)
∂ī g i ◦ f (x) ∂j f ī (x) = δji
erhält man schlussendlich
h
i−1
ī
∂ī g ◦ f (x) = ∂j f (x)
.
i
80
4.2. Inverse und implizite Funktion
y
4. Mathematische Grundlagen
x
x3
√
3
x
y
y
Abbildung 4.2: Ein Homeomorphismus aber kein Diffeomorphismus.
Dabei wurde von der Differenzierbarkeit von f und f −1 wesentlich Gebrauch gemacht.
Die Umkehrfunktion f −1 muss jedoch nicht differenzierbar sein, selbst wenn f glatt und
bijektiv ist.
Dazu beachte man die spezielle Funktion
y = x3 .
Nun gilt
∂
y(0) = 0 .
∂x
Man beachte, dass die Umkehrfunktion mit
x = y 1/3
sehr wohl existiert. Sie ist sogar stetig, aber nicht stetig differenzierbar. Damit ist diese
Funktion ein Homeomorphismus. Siehe auch Bild 4.2.
Um Fallunterscheidungen wie oben zu vermeiden, wird oft verlangt, dass die Abbildung
f wie ihre Inverse Ableitungen beliebiger Ordnung besitzt. Dazu folgende Definition.
Definition 4.34 Eine Abbildung f : U → V mit U ⊂ Rn und V ⊂ Rn heißt Diffeomorphismus, wenn f die Bedingungen von Satz 4.10 für r = ∞ erfüllt.
Es existieren nun auch Gegenstücke zu den Sätzen über inverse oder implizite Funktionen
in nicht finiten Räumen. Für das Weitere wird noch der nachstehende Satz benötigt.
Satz 4.12 Es seien E, F Banach Räume und die Abbildung f : U ⊂ E → F sei stetig
differenzierbar, f ∈ C (U, F ). Ist nun Df (u), u ∈ U surjektiv, dann ist f lokal surjektiv.
Somit existieren offene Umgebungen Ū von u und V̄ von f (u) so, dass f |Ū → V̄ surjektiv ist. Gilt noch, dass Df (u) für alle u ∈ U surjektiv ist, dass ist f dort eine offene
Abbildung.
Auf den Beweis dieses Satzes wird hier verzichtet.
Satz 4.13 Es seien E, F Banach Räume und die Abbildung f : U ⊂ E → F sei stetig
differenzierbar, f ∈ C (U, F ). Ist nun Df (u), u ∈ U surjektiv, dann ist f lokal surjektiv.
Somit existieren offene Umgebungen Ū von u und V̄ von f (u) so, dass f |Ū → V̄ surjektiv ist. Gilt noch, dass Df (u) für alle u ∈ U surjektiv ist, dass ist f dort eine offene
Abbildung.
Auch auf den Beweis dieses Satzes wird hier verzichtet.
81
4.2. Inverse und implizite Funktion
4.2.1
4. Mathematische Grundlagen
Mittelwertsätze
Satz 4.14 Zur Abbildung f : U → V , (f ∈ C 1 (U, V )) mit U = [a, b] ⊂ R, V ⊂ Rn gibt
es ein x ∈ Uso, dass
kf (b) − f (a)k ≤ |b − a| kDf (x)k
gilt.
Zum Beweis betrachte man die Funktion ϕ (τ ) = (f (b) − f (a) , f (t)) mit dem Innenprodukt der trivialen Metrik. Mit Hilfe des Mittelwertsatzes der Integralrechnung folgt
nun
ϕ (b) − ϕ (a) = (b − a) (f (b) − f (a) , Df (x))
für ein x ∈ U. Der Rest folgt dann aus ϕ (b) − ϕ (a) = ((f (b) − f (a) , f (b) − f (a))) =
kf (b) − f (a)k22 und der Beziehung
kf (b) − f (a)k22 = (b − a) (f (b) − f (a) , Df (x)) ≤ (b − a) kf (b) − f (a)k2 kDf (x)k2 .
Satz 4.15 Es gelte für die Abbildung f : U → V , (f ∈ C 1 (U, V )) mit einer offenen
U ⊂ Rm , V ⊂ Rn die Beziehung
kDf (x)k ≤ M ∈ R+
für alle x ∈ U, sowie für ein beliebiges Paar x1 , x2 ∈ U auch x1 (1 − t) + x2 t ∈ U für
0 ≤ t ≤ 1, dann folgt
kf (x2 ) − f (x)k ≤ M kx2 − x1 k .
Zum Beweis betrachte man nun die Funktion g,
g (t) = f (x1 (1 − t) + x2 t)
Dg (t) = Df (x1 (1 − t) + x2 t) (x2 − x1 )
Mit der Abschätzung kDg (t)k ≤ M kx2 − x1 k und des vorigen Satzes erhält man sa
gewünschte Ergebnis
82
Literaturverzeichnis
[1] W. M. Boothby. An Introduction to Differentiable Manifolds and Riemanmnian Geometry. Academic Press, Inc., Orlando, USA, 1986.
[2] R. Bryant, S. Chern, R. Gardner, H. Goldschmidt, P. Griffith. Exterior Differential
Systems. Springer, New York, USA, 1991.
[3] Y. Choquet-Bruhat, C. DE Witt Morette. Analysis, Manifolds and Physics. North
Holland, Amsterdam, NL, 1982.
[4] A. Fitzgerald. Electric Machinery. McGraw-Hill, New York, USA, 1990.
[5] T. Frankel. The Geometry of Physics, An Introduction. Cambridge University Press,
Cambridge, UK, 1998.
[6] G. Giachetta, L. Mangiarotti, G. Sardanashvily. New Lagrangian and Hamiltonian
Methods in Field Theory. Springer, London, UK, 1997.
[7] A. Isidori. Nonlinear Control Systems. Springer, London, UK, 1995.
[8] A. Isidori. Nonlinear Control Systems II. Springer, London, UK, 1999.
[9] H. Khalil. Nonlinear Systems 3rd Edition. Prentice Hall, New Jersey, US, 2002.
[10] D. Luenberger. Optimization by Vector Space Methods. John Wiley & Sons, Inc.,
New York, USA, 1969.
[11] R. Marsden, T. Ratiu. Manifolds, Tensor Analysis, and Applications. Springer,
London, UK, 1988.
[12] K. Mayer. Algebraische Topologie. Birkhäuser Verlag, 1989.
[13] H. Nijmeijer, A. van der Schaft. Nonlinear Dynamical Control Systems. Springer,
New York, USA, 1990.
[14] P. J. Olver. Applications of Lie Groups to Differential Equations. Springer, New
York, USA, 1993.
[15] P. J. Olver. Equivalence, Invariants, and Symmetry. Cambridge University Press,
Cambridge, UK, 1995.
83
LITERATURVERZEICHNIS
LITERATURVERZEICHNIS
[16] J. F. Pommaret. Systems of Partial Differential Equations and Lie Pseudogroups.
Gordon and Breach Science Publishers, New York, USA, 1978.
[17] S. Sastry. Nonlinear Systems Analysis, Stability and Control. Springer, New York,
USA, 1999.
[18] D. Saunders. The Geometry of Jet Bundels. Cambridge University Press, Cambridge,
UK, 1989.
[19] M. Spivak. Differential Geometry, Vol. 1 to 5. Publish or Perish, Inc., Houston, USA,
1979.
84