Datenblatt: Gleichgewichtsberechnung
Werbung

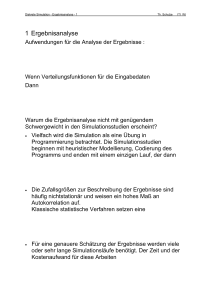
Datenblatt Berechnung des Gleichgewichtszustandes Anwendung Oft ist es sinnvoll, die eigentliche Simulation im Gleichgewichtszustand (statisch oder stationär) zu beginnen. Hierfür alle Anfangswerte manuell zu ermitteln und einzutragen ist jedoch wenig praktikabel. Eine effiziente Methode bietet SimulationX mit der Berechnung des Gleichgewichtszustandes. In Erweiterung des klassischen Gleichgewichtsbegriffes, bei dem alle zeitabhängigen Größen unveränderlich sind (statisches Gleichgewicht), findet z.B. in der Mechanik auch der Zustand konstanter Geschwindigkeiten (stationäres Gleichgewicht) als Ausgangszustand für Simulationen Anwendung. Die Gleichgewichtsanalyse wird für das gesamte Modell unter Berücksichtigung aller darin enthaltenen Komponenten unterschiedlichster physikalischer Wirkprinzipien durchgeführt. Statische und stationäre Analyse mechanischer Systeme Stationäre Auslegung hydraulischer Antriebe DC-ArbeitspunktAnalyse von Schaltungen Start der Simulation aus dem Gleichgewichtszustand Analyse vorgespannter Systeme Per Knopfdruck lässt sich der Gleichgewichtszustand berechnen. Dies ist zu beliebigen Simulationszeitpunkten möglich. Damit kann ein Gleichgewichtszustand (statisch oder stationär) für beliebige Systemzustände und nicht nur für den Anfangszustand berechnet werden. Beispiele für Gleichgewichtszustände sind: • Elektrotechnik: • Hydraulik: • Mechanik: o o DC-Arbeitspunkt einer Verstärkerstufe Stationäre Auslegung eines Hydraulikantriebs o eingefedertes elastisch gelagertes System o Fahrzeug mit konstanter Geschwindigkeit startet ein Fahrmanöver Verhalten Systeme können • genau einen Gleichgewichtszustand, • mehrere (ein Pendel hat z.B. eine stabile und eine instabile Gleichgewichtslage), • unendlich viele mögliche Gleichgewichtszustände (z.B. eine Kugel auf einer Ebene), • überhaupt keinen Gleichgewichtszustand besitzen. Seite 2 von 2 Berechnungsmethode Beispiel 2 Der Lösungsalgorithmus setzt die höchsten Ableitungen der Zustandsgrößen gleich null und sucht einen konsistenten Zustand, der diese Bedingungen erfüllt. Das führt auf ein nichtlineares Gleichungssystem, welches iterativ gelöst wird. Der Anfangszustand dient dabei als Startpunkt der Iteration. Wird kein Gleichgewichtszustand ermittelt, lässt sich mit einem geänderten Anfangszustand eine erneute Gleichgewichtsberechnung starten. Das elastische Pendel hat zwei Gleichgewichtszustände – einen stabilen und einen instabilen (Bild 3). Beispiel 1 Das folgende mechanische Feder-Masse-System mit Berücksichtigung des Eigengewichts der Masse wird zum Zeitpunkt t=0.15 s durch einen Impuls angeregt. Bild 3: Gleichgewichtslagen des elastischen Pendels – stabil (links) und instabil (rechts) Beispiel 3 Bild 1: Mechanisches System unter Eigengewicht mit Impulsanregung m 0.025 0.02 0.015 Bild 4: 0.01 0.005 s 0 0 Bild 2: 0.2 0.4 0.6 0.8 Modell eines einfachen Transistorverstärkers in Emitterschaltung Ohne die Gleichgewichtsberechnung erhält man bei der Transientenanalyse ein Einschwingverhalten wie beim Einschalten der Betriebsspannung (blau gestrichelt in Bild 5). 1 Weg der Masse für die Simulation aus dem Gleichgewichtszustand (rote Volllinie) und aus dem Anfangszustand (blaue Strichlinie) Wird die Simulation aus dem Gleichgewichtszustand gestartet, ist nur die Wirkung des Impulses zu sehen (rote Volllinie). Im anderen Fall ist die Impulswirkung der Einschwingvorgang infolge der Gewichtskraft und der damit verbundenen Absenkung der Masse überlagert (blau gestrichelt). v - rLoad ohne Gleichgewicht v - rLoad mit Gleichgewicht V 8 6 4 2 0 -2 s 0 Bild 5: 0.002 0.004 0.006 0.008 0.01 Spannung über dem Lastwiderstand ohne und mit Gleichgewichtsberechnung ITI Headquarters Schweriner Straße 1 ⋅ 01067 Dresden ⋅ Germany ⋅ T +49 (0) 351.260 50 - 0 ⋅ F +49 (0) 351.260 50 - 155 ⋅ [email protected] SimulationX For your local representative please visit www.simulationx.com/global ITI and SimulationX are registered trademarks of ITI GmbH Dresden. © ITI GmbH, Dresden, Germany, 2013. All rights reserved.