Mechanik II - schnoegl.at
Werbung

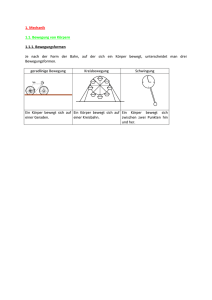
Mechanik II Skriptum zur Fachvorlesung Mag. Peter Schnögl Mag. Harald Wiltsche Mechanik 2 Der Impuls Der Impuls eines Teilchens ist definiert als Produkt aus einer Masse und seiner Geschwindigkeit r p = mv Zusammenhang zwischen Impuls und Kraft: dp d (mv) dv = =m = ma = F dt dt dt dp = Fdt ...Kraftstoß Beispiel Ein Puck (m =160 g) bewegt sich mit 16 m/s auf einen Eishockeyspieler zu. Dieser erteilt ihm mit dem Schläger eine Geschwindigkeit von 20 m/s in entgegengesetzter Richtung. Die Kraft des Schlages wirkt auf den Puck 0,01 s lang. Berechnen Sie die durchschnittliche Kraft, die vom Spieler auf den Puck ausgeübt wird. ∆p = F .∆t m.∆v = F .∆t m.∆v F= ∆t Da die Geschwindigkeiten entgegengesetzt sind, gilt: ∆v = v 2 − ( −v 1 ) = v 2 + v1 m.( v1 + v 2 ) F= = ∆t 0,16kg ⋅ 36 0,01s m s = 576N Betrachtet man zwei Teilchen, die aufeinander entgegengesetzt gleich große Kräfte ausüben, so erhält man: dp1 dt dp F21 = 2 dt F12 = −F21 F12 + F21 = 0 F12 = 0= dp1 dp2 d(p1 + p2 ) + = dt dt dt ⇒ p1 + p2 = const. allgemein (für n Teilchen) gilt: p ges = m ges v System = ∑ m i v i = const. i Seite 2 Mechanik 2 Gesetz von der Impulserhaltung: Wirkt auf ein System von Massenpunkten keine resultierende äußere Kraft, dann ist die Geschwindigkeit seines Massenmittelpunktes konstant und der Gesamtimpuls des Systems bleibt erhalten (d.h. der Impuls stellt eine Erhaltungsgröße dar). andere Formulierung: In einem abgeschlossenen System bleibt der Gesamtimpuls erhalten. Beispiel: Mann im Boot zuerst ist p=0; da der Gesamtimpuls konstant bleibt, muss der Impuls zu jedem Zeitpunkt null sein! m1 v1 + m2 v 2 = const = 0 m2 v 2 = − m1 v1 m v 2 = − 1 v1 m2 Stoßvorgänge Elastischer Stoß: Die Verformungen beim Zusammenprall werden zur Gänze rückgängig gemacht. Die Gesamtenergie bleibt als Bewegungsenergie erhalten. vor dem Stoß: m1v1, m2v2 nach dem Stoß: m1v1’, m2v2’ Unelastischer Stoß: Die Verformungen bleiben bestehen; ein Teil der kinetischen Energie wird in innere Energie umgewandelt: vor dem Stoß: m1v1, m2v2 nach dem Stoß: (m1 + m2)v’ Beispiele a) Kugelpendel Dass auf der anderen Seite auch zwei Kugeln wegfliegen, lässt sich allein mit der Energieerhaltung nicht erklären; man benötigt auch den Impulserhaltungssatz Nach dem Energieerhaltungssatz könnte auf der rechten Seite auch nur eine Kugel mit größerer Geschwindigkeit wegfliegen. Seite 3 Mechanik 2 Annahme: 1) Es werden links zwei Kugeln ausgelenkt, rechts wird nur eine Kugel mit größerer Geschwindigkeit weggestoßen Impulserha ltung : mv + mv = mv ′ Energieerh altung : mv 2 mv 2 mv ′ 2 + = 2 2 2 ⇔ 2mv = mv ′ ⇔ 2 mv 2 v ′ 2 = 2 2 ⇔ v ′ = 2v ⇔ v ′ = v. 2 Widerspruch !! Annahme: 2) Es werden rechts zwei Kugeln mit verschiedenen Geschwindigkeiten weggestoßen I : mv + mv = mv1 + mv 2 1 1 1 1 2 2 E : mv 2 + mv 2 = mv1 + mv 2 2 2 2 2 I : 2v = v1 + v 2 → v1 = 2v − v 2 → einsetzen in E 2 2 2 E : 2v 2 = v1 + v 2 = (2v − v 2 ) 2 + v 2 = 4v 2 − 4vv 2 + 2v 2 v 2 = 2v 2 − 2vv 2 + v 2 0 = v 2 − 2vv 2 + v 2 2 2 2 0 = (v − v 2 ) 2 ⇒ v = v 2 v1 = 2v − v 2 = 2v − v = v ⇒ v = v1 = v 2 b) Ballistisches Pendel m2 v = (m1 + m2 )v' v' = 2gh v= c) (m1 + m2 ) 2gh m2 Raketenantrieb: Eine Rakete stößt Verbrennungsgase der Masse ∆m mit der Geschwindigkeit v0 aus. Ihre Geschwindigkeit erhöht sich um ∆v. Es gilt: ∆mv 0 = ( m0 − ∆m)∆v ∆mv 0 ∆v = m0 − ∆m d) Astronaut in Not: Ein von einem Raumschiff getrennter Astronaut bemerkt, dass sich das Raumschiff mit v = 0,12 m/s von ihm entfernt. Er hat einen Hammer (m= 1,2 kg) bei sich. Auf welche Weise kann er das Raumschiff erreichen, wenn seine Masse samt Ausrüstung 115 kg beträgt ? (Lösung: v > 11,5m/s) Seite 4 Mechanik 2 Die Kreisbewegung Bewegt sich ein Teilchen mit konstanter Geschwindigkeit auf einer Kreisbahn (Translation !), so handelt es sich dabei um eine beschleunigte Bewegung! Die zeitliche Änderung der Bahngeschwindigkeit betrifft dabei nicht den Betrag, sondern die Richtung des Geschwindigkeitsvektors. Die Beschleunigung heißt Zentripetalbeschleunigung und ist zum Kreismittelpunkt hin gerichtet. Der Betrag der Zentripetalbeschleunigung ist v2 a= r Die gleichförmige Rotationsbewegung Den Größen Weg, Geschwindigkeit und Beschleunigung einer Translationsbewegung entsprechen die Größen Drehwinkel, Winkelgeschwindigkeit und Winkelbeschleunigung bei der Rotationsbewegung. Der Drehwinkel ϕ für die Drehbewegung wird im Bogenmaß gemessen. Dieses ist definiert durch Drehwinkel = Einheit: 1 rad = 57,29° Bogenlänge Radius [ϕ ] = ϕ= s r 1m = 1 ( Radiant ) = 1 rad 1m 90° = 1,57rad 180° = π rad 360° = 2π rad Unter der (momentanen) Winkelgeschwindigkeit ω versteht man die zeitliche Änderung des Drehwinkels: ω= ∆ϕ ∆t [ω ] = 1 rad 1 = = s −1 s s Die Winkelgeschwindigkeit ist eine vektorielle Größe, die Richtung ist durch die Rechtsschraubenregel festgelegt. Unter der (momentanen) Winkelbeschleunigung α versteht man die zeitliche Änderung der Wnkelgeschwindigkeit: α= ∆ω ∆t [α ] = 1 rad 1 = 2 = s −2 2 s s Die Winkelbeschleunigung ist eine vektorielle Größe, die Richtung folgt aus der Richtung der Winkelgeschwindigkeit (Rechtsschraubenregel). Seite 5 Mechanik 2 Unter der Frequenz f versteht man allgemein die Anzahl der periodischen Vorgänge pro Sekunde. Im Fall der Rotation sind das die Umdrehungen pro Sekunde (d.h. die Frequenz stimmt mit der Drehzahl n=U/s überein). [f]= 1 = 1 Hz ( Hertz ) s Die Umlaufzeit T ist die Zeit für eine ganze Umdrehung (für einen Drehwinkel von 2π ). Es gilt somit der Zusammenhang T= 1 f ω= ϕ t = 2π = 2πf T Der Zusammenhang zwischen der Winkelgeschwindigkeit ω und der Bahngeschwindigkeit v eines Körpers ergibt sich aus folgender Überlegung: v= s 2πr 2π = =r = rω t T T Bei einer gleichförmigen Rotation ist die Winkelgeschwindigkeit für alle Punkte eines Drehkörpers (z.B. einer Scheibe) gleich groß. Die Bahngeschwindigkeit wächst hingegen mit dem Abstand von der Drehachse. Beispiel: a) Bestimmen Sie die Winkelgeschwindigkeit der Erde. t = 24h = 24.60.60 s = 86400s ω= ϕ t = 2π rad 1 = 7,27.10 −5 s 86400 s b) Bestimmen Sie die Bahngeschwindigkeit eines Körpers, der sich am Äquator befindet (wenn man das Weltall als ruhendes Bezugssystem voraussetzt) Erdradius=6378km. v = r.ω = r.2π m km = 6378.10 3 m.7,27.10 − 5 s −1 ≈ 463 = 1670 T s h c) Ein Körper am Äquator erfährt auf Grund der Erdrotation eine Beschleunigung in Richtung des Erdmittelpunktes. Weiterhin erfährt er auf Grund der Rotation der Erde um die Sonne eine Beschleunigung in Richtung der Sonne. Berechnen Sie beide Beschleunigungen und drücken Sie sie in Abhängigkeit von der Erdbeschleunigung g aus (Entfernung Erde-Sonne: 1,5.1011m). az = v2 464 2 m2 m = ≈ 3,375.10 − 2 2 ≈ 3,4.10 −3 g 3 2 R E 6378.10 s m s az = ( 2π .1,5.1011 m 2 1 1 m ) . = 5,93.10 −3 2 ≈ 6.10 − 4 g 3,16.10 7 s 1,5.1011 m s Seite 6 Mechanik 2 Trägheitsmoment und Rotationsenergie Bei der Bestimmung der Bewegungsenergie eines rotierenden Körpers ist zu beachten, dass im Gegensatz zur Translation die einzelnen Massenpunkte unterschiedliche Geschwindigkeiten besitzen. Diese Bahngeschwindigkeiten hängen von der Winkelgeschwindigkeit und dem Abstand des Punktes vom Drehpunkt ab. v i = riω Für die Bewegungsenergie eines Massenpunktes mi gilt: mi v i 2 mi ri 2ω 2 Ei = = 2 2 Die Rotationsenergie des gesamten Körpers ergibt sich aus der Summe der Rotationsenergien aller Massenpunkte: 1 2 Erot = ∑ Ei = ω 2 .∑ mi ri 2 i Die Summe ∑m r i i 2 heißt Trägheitsmoment I des Körpers bezüglich der Drehachse D Für die Rotationsenergie ergibt sich somit: Erot Iω 2 = 2 Bemerkung: Das Trägheitsmoment I bei der Rotation entspricht der Masse m bei der Translation Die Bestimmung des Trägheitsmomentes erfolgt i.a. mit Hilfe der Integralrechnung I = ∫ r 2 dm Seite 7 Mechanik 2 Trägheitsmomente symmetrischer Körper: Dünner Hohlzylinder (z.B. Reifen) I = m.r² Homogener Vollzylinder: I = ½ m r² Homogene Kugel: I = 2/5 m r² Experiment: a) Ein Hohlzylinder und ein Vollzylinder gleicher Masse und mit gleichem Radius rollen eine schiefe Ebene hinunter: der Vollzylinder kommt früher unten an. Erklärung: die potentielle Energie wird in kinetische Energie und in Rotationsenergie verwandelt. Je höher das Trägheitsmoment, umso höher die Rotationsenergie und daher umso kleiner der Anteil der kinetischen Energie (und umso kleiner die Geschwindigkeit!) b) "Eierprobe": Ein rohes Ei ist schwerer in Rotation zu versetzen, als ein gekochtes Ei. Erklärung: Ein gekochtes Ei kann mehr Rotationsenergie aufnehmen, da sich alle Teilchen wie bei einem starren Körper mitdrehen. c) Ein rohes Ei rollt schneller auf einer schiefen Ebene herab, weil das Innere praktisch ohne Drehung nach unten gleitet. Beispiel: Berechnen Sie die Endgeschwindigkeit eines Massivzylinders, welcher längs einer schiefen Ebene der Höhe h herunterrollt (Hinweis: diese Angaben sind ausreichend zur Lösung der Aufgabe). Nach dem Energieerhaltungssatz gilt: E pot = Ekin + Erot mv 2 Iω 2 mgh = + 2 2 2 mv mv 2 mgh = + 2 4 2 gh v= 3 1 2 mr 2 v ω= r I= v ist unabhängig von m und r! aber abhängig von der Form der Körpers und der Höhe h. Rotierende Körper können in Form von Schwungrädern zur Energiespeicherung verwendet werden. z.B: bei Verbrennungskraftmaschinen zum Überwinden des Totpunktes, für einen "runden Lauf"; VW Ökodiesel, ... Seite 8 Mechanik 2 Beispiel: Welche Energie ist in einem Schwungrad aus Stahl (ρ=7900kg/m³) mit einem Durchmesser von 3m und einer Höhe von 2m gespeichert, wenn es mit 300 Umdrehungen pro Minute (5 Ups) rotiert. Wie lange könnte mit dieser Energie ein Heizstrahler mit einer Leistung von 2kW damit betrieben werden? a) Erot = Iω 2 mr 2ω 2 = 2 2.2 , . 5 kg = 112t m = ρ.V = 7900kgm−3 .1,5 2 π .2m3 = 11210 ω = 2πf = 2π .5 = 10π Erot = , . 5 .1,5 2 .100π 2 11210 . 7J ≈ 210 4 b) W W = Pt ⇒ 1J = 1Ws t . 7 Ws W 210 = = 10 4 s ≈ 2h47m t= . 3W P 210 P= Bewegung um freie Achsen - Hauptträgheitsachsen Bei allen Körpern gibt es kräftefreie (ohne Lagerbelastung) Rotationsachsen: Elektromotoren, Kinderkreisel, Erde, ... I.a. gibt es drei besondere, jeweils durch den Schwerpunkt verlaufende Rotationsachsen, um die das Trägheitsmoment Extremwerte (Maximum, Minimum, Sattelpunkt) besitzt. z.B.: Hauptträgheitsachsen eines Quaders Am stabilsten ist immer die Achse mit dem größten Trägheitsmoment (A); danach kommt jene mit dem kleinsten TM (B); am instabilsten ist jene mit dem mittleren TM (C). Seite 9 Mechanik 2 Drehimpuls Unter dem Drehimpuls L versteht man das Produkt aus Trägheitsmoment I und Winkelgeschwindigkeit ω L=Iω Die Richtung des Drehimpulsvektors stimmt mit jenem der Winkelgeschwindigkeit überein (zeigt in Richtung der Drehachse). Dem Kraftstoß bei der Translation entspricht bei der Rotation der Drehmomentstoß M∆t = I∆ω . Analog zur Formulierung des 2.Newtonschen Axioms für die Translation in der Form F = dp/dt kann das 2.NA für die Rotation in der Form M= dL d ( Iω ) dω = =I = Iα dt dt dt α ... Winkelbeschleunigung angeschrieben werden. Gesetz von der Erhaltung des Drehimpulses: In einem abgeschlossenen System bleibt der Gesamtdrehimpuls erhalten (L = const). Für ein abgeschlossenes System (ein System, auf das keine äußeren Kräfte und Drehmomente wirken) gibt es daher drei Erhaltungsgrößen: ♦ Energie ♦ Impuls ♦ Drehimpuls "Drehstuhlexperiment" Bei Verringerung des Trägheitsmomentes durch Heranziehen der Gewichte kommt es zu einer Erhöhung der Winkelgeschwindigkeit. Das Produkt I.ω und damit der Drehimpuls L bleibt konstant. Beachte: Die Rotationsenergien sind keineswegs gleich: wenn ω1 < ω2, dann folgt I 1ω 1 2 I 2ω 2 2 < 2 2 Beim Anziehen der Arme muss Arbeit gegen die Zentrifugalkraft verrichtet werden. Diese von der Person aufgebrachte Arbeit wird in Rotationsenergie umgewandelt. Die Erhaltung des Drehimpulses wird auch bei verschiedenen Sportarten ausgenutzt: • Beim Eislaufen kann die Eisläuferin bei der Pirouette durch ein seitliches Ausstrecken der Arme ihre Winkelgeschwindigkeit herabsetzen, durch Anziehen der Arme erhöhen. • Beim Schlagen eines Saltos wird durch das Anziehen der Arme und Beine die Drehgeschwindigkeit erhöht. Seite 10 Mechanik 2 Drehimpulssatz in einem nicht abgeschlossenen System Wirkt auf ein System z.B. ein äußeres Drehmoment (in Form eines Kräftepaares), so gilt: dL ∆L = M bzw. =M dt ∆t Die zeitliche Änderung des Drehimpulses ist gleich dem gesamten von außen angreifenden Drehmoment. Mit anderen Worten (klingt dieser Zusammenhang hoffentlich verständlicher): Der Drehimpulsvektor hat das Bestreben, sich gleichsinnig parallel zum angreifenden Drehmomentvektor zu stellen: Dieses Zusammenhang bietet z.B. die Grundlage zum "Freihändig - Radfahren" Anwendung des Erhaltungssatzes des Drehimpulses: • • Jongleure: versetzen Bälle und Ringe in Rotation Kanonen und Gewehre besitzen gezogene Läufe, ... Kreisel Als Kreisel bezeichnet man einen in höchstens einem Punkt festgehaltenen rotierenden Körper. Ist dieser rotationssymmetrisch, so bezeichnet man seine Symmetrieachse als Figurenachse. Ihre Lage stimmt mit der des Drehimpulsvektors überein. Bei einem im Schwerpunkt unterstützten Kreisel bleibt diese Achse raumfest. Befindet sich der Schwerpunkt oberhalb des Unterstützungspunktes, so erzeugt die Gewichtskraft ein Drehmoment. Ein ruhender Kreisel würde dadurch nach unten kippen; der rotierende Kreisel weicht jedoch senkrecht zu dieser wirkenden Kraft aus. Die Rotationsachse umschreibt dabei einen Drehkegel. Diese Bewegung wird als Präzession bezeichnet. Präzession der Erde: Die Erde kann als Kreisel betrachtet werden. Aufgrund der Abplattung (man kann sich die Erde als Kugel mit Ring um den Äquator vorstellen), sind die Gravitationskräfte der Sonne auf beide Erdhälften verschieden groß. Das resultierende Drehmoment versucht die Erde aufzurichten, wodurch es zu einer Präzessionsbewegung kommt, bei welcher die Erdachse in 26000 Jahren einen Kegelmantel durchläuft (platonisches Jahr). Seite 11 Mechanik 2 SCHWINGUNGEN Definition der Schwingung Schwingung ist ein Vorgang, bei dem sich eine physikalische Größe in der Art ändert, dass sie nach Ablauf bestimmter Zeitabschnitte stets wieder den gleichen Wert annimmt (periodischer Vorgang). Diese physikalische Größe kann sein: Temperatur eines Körpers, Abstand eines Körpers von einer bestimmten Ruhelage, Stärke eines elektrischen oder magnetischen Feldes, Intensität einer Lichtquelle, Luftdruck an einem bestimmten Ort, ... Mechanische Schwingung Darunter versteht man eine zeitlich periodische Bewegung eines Körpers (Oszillators) um seine Ruhelage. Ursache für die Schwingung sind eine stets zur Ruhelage gerichtete Kraft (Rückstellkraft) und die Trägheit des Körpers (sie lässt den Körpers immer wieder über die Ruhelage hinausfahren). Harmonische Schwingungen Ist die Rückstellkraft (und damit die Beschleunigung) eines Gegenstandes proportional zu seiner Auslenkung und dieser entgegengesetzt, dann führt der Gegenstand eine harmonische Schwingung aus. Einfachstes Beispiel für einen harmonisch schwingenden Körper: Federpendel Es gilt das lineares Kraftgesetz (Hookesches Gesetz): Fy = − k ⋅ y Das Minus ergibt sich aus der entgegengesetzten Richtung der Auslenkung und der Rückstellkraft. Man nennt k wird in diesem Zusammenhang Richtgröße der schwingenden Systems. Harmonische Schwingung und Kreisbewegung Die Bewegung eines Teilchens, das sich mit konstanter Geschwindigkeit v auf einer Kreisbahn mit dem Radius r bewegt stellt nach obiger Definition eine Schwingung dar. Bei einer Projektion des Teilchens auf die y-Achse erkennt man die Analogie zur Schwingung eines Federpendels. Der vertikale Abstand des Teilchens von der Mittellage entspricht dabei der Auslenkung y des Federpendels. Vergleich aus dem Alltag: Beobachtung der Pedalbewegung beim Radfahren von der Seite und von hinten (Abb. aus Kraker-Paill Physik 2) Seite 12 Mechanik 2 Für die Auslenkung y ergibt sich aus dem Dreieck: y = r. sin ϕ bzw. in Abhängigkeit von der Zeit y = r. sin ωt Auf Grund dieser Beziehung spricht man bei einer harmonischen Schwingung auch von einer sinusförmigen Schwingung oder Sinusschwingung. Bemerkung: genauso gut könnte man die Schwingung auch mit der Kosinusfunktion beschreiben, wenn man den Vorgang nicht vom Nullpunkt aus, sondern von der höchsten Auslenkung aus starten würde (es gilt ja cos x π = sin( x + ) ). 2 Eine Sinuskurve würde auch aufgezeichnet werden, wenn man an einem Federpendel einen Stift befestigen und einen Papierstreifen mit konstanter Geschwindigkeit vorbeiführen würde. Folgende Begriffe sind geläufig: y .......... Elongation, momentane Auslenkung aus der Ruhelage r........... Amplitude, maximale Auslenkung ω ......... Kreisfrequenz, Winkelgeschwindigkeit [ω] = s-1 T.......... Schwingungsdauer; Zeit, die der Körper für eine vollständige Schwingung benötigt f........... Frequenz, Zahl der Schwingungen pro Sekunde [f] = 1 Hz (Hertz) dabei gilt: ω= 2π 1 = 2π . = 2π . f T T Harmonische Schwingung des Federpendels Für die (elastische) Dehnung einer Feder durch ein Massestück gilt das Hookesche Gesetz; Fy = − ky somit ist die Bedingung für eine harmonische Schwingung erfüllt. Dieses Gesetz lässt sich in Form einer Differentialgleichung anschreiben (Bewegungsgleichung des Federpendels): Fy = m.a = m ⋅ d2y = −ky dt 2 bzw. d2y k = &y& = − y 2 dt m Durch Einsetzen der aus der Kreisbewegung hergeleiteten Schwingungsgleichung erhält man den Zusammenhang zwischen Schwingungsdauer, Masse des Pendelkörpers und der Federkonstanten k: y = r sin ωt y& = ωr cosωt ( Elongation) (Geschwindigkeit ) &y& = −ω 2 r sin ωt ( Beschleunigung ) k &y& = − y m k − ω 2 r sin ωt = − r sin ωt m k ω2 = m 1 k k m ω= ⇒f = bzw. T = 2π 2π m k m Bemerkung: Bei einer harmonischen Schwingung ist die Schwingungsdauer unabhängig von der Amplitude. Seite 13 Mechanik 2 Beispiele: 1. Eine Schraubenfeder wird durch eine Kraft von 2 N um 1 cm verlängert. Wie groß sind Frequenz und Schwingungsdauer, wenn sich an der Feder eine Masse von 500 g befindet? (Lösung: f=3,18 Hz) 2. Ein Federpendel hat die Frequenz von 2,4 Hz. Mit welcher Frequenz schwingt es, wenn die Masse verdoppelt wird? (Lösung: f = 1,7 Hz) 3. An eine Schraubenfeder werden m=3 kg gehängt. Wie groß ist die Federkonstante bei einer Frequenz von 2 Hz? (Lösung: k = 473,7 N/m) 4. Die Masse eines Autos beträgt 740 kg. Durch eine Nutzlast von 300 kg senkt sich der Wagen in den Radfedern um 6 cm. Welches T hat die Schwingung nach dem Fahren über eine Querrinne? (Lösung: T = 0,9 s) Seite 14 Mechanik 2 Das Fadenpendel Wir betrachten den idealisierten Fall des mathematischen Pendels: eine punktförmige Masse hängt an einem masselosen Faden. Für die Praxis bedeutet das: dünner, langer Faden und schwerer, wenig ausgedehnter Gegenstand. (Abb. aus Tipler, Physik) Die Tangentialkomponente der Schwerkraft ( − mg sin ϕ ) bildet die Rückstellkraft für den Pendelkörper. Es gilt daher d 2s = − mg sin ϕ dt 2 d 2s s = − g sin ϕ = − g sin (ϕ im Bogenmaß) 2 dt l F = ma = m Für kleine Winkel stimmen der Sinus eines Winkels und der Winkel selbst (im Bogenmaß) ziemlich überein; d.h. sin s s ≈ . Somit erhält man l l d 2s s g d 2s = − g sin ≈ s entspreche nd = − ks = −ω 2 s 2 2 dt l l dt Für die Schwingungsdauer erhält man daraus: ω2 = g ⇒ 2πf = l g 1 ⇔ f = l 2π g l ⇔ T = 2π l g Für kleine Winkel, bei denen die Näherung sin ϕ ≈ ϕ gilt, ist also die rücktreibende Beschleunigung der Auslenkung proportional und die Schwingung somit eine harmonische Schwingung. Die Schwingungsdauer hängt dabei nur von der Pendellänge ab (Möglichkeit zur experimentellen Bestimmung der Erdbeschleunigung) – sie ist unabhängig von der Masse des Pendelkörpers! Seite 15 Mechanik 2 Beispiele: 1. Wie groß ist die Schwingungsdauer eines Pendels mit der Pendellänge l=1m? (Lösung: T=2,01s) 2. Wie ist die Pendellänge zu verändern, um die Schwingungsdauer zu verdoppeln? 3. Welche Pendellänge benötigt man für ein "Sekundenpendel" (eine Halbschwingung pro Sekunde)? (Lösung: l=0,99m) 4. Im Hauptgebäude der Vereinten Nationen in New York hängt ein Foucaultsches Pendel. Eine 100kg schwere Kugel hängt an einem 22,9m langen Stahlseil. Wie groß ist die Schwingungsdauer? Welche Bedeutung hat das Foucaultsche Pendel? (Lösung: T=9,6s) Seite 16 Mechanik 2 Energiebilanz bei harmonischen Schwingungen Es findet eine ständige Umwandlung von kinetischer und potentieller Energie bei konstanter Gesamtenergie statt. z.B. Federpendel: E ges = E pot + E kin = 1 2 1 2 kx + mv 2 2 Bei maximaler Auslenkung (x=r) ist die Geschwindigkeit (und damit die kinetische Energie) gleich Null; die potentielle Energie gleich der Gesamtenergie: 1 E ges = kr 2 2 d.h. die Gesamtenergie einer harmonischen Schwingung ist proportional dem Quadrat der Amplitude. Beispiel: Ein Gegenstand mit einer Masse von 3 kg schwinge an einer Feder mit einer Amplitude von 4 cm und einer Schwingungsdauer von 2 s. Berechnen Sie die Gesamtenergie und die Maximalgeschwindigkeit des Pendelkörpers. (Lösung: E=2,37.10-2 J, vmax=0,126 ms-1) Gedämpfte Schwingungen Die ungedämpfte Schwingung stellt einen theoretischen Idealfall dar. Wird z.B. ein Pendel zu Schwingungen angeregt und sich selbst überlassen, so nimmt auf Grund von Energieverlusten (Reibung, Luftwiderstand, ...) die Amplitude ständig ab – es handelt sich dabei dann um eine gedämpfte Schwingung. Das Amplitudenverhältnis einer (schwach) gedämpften Schwingung ist dabei konstant und ein Maß für die Dämpfung. r1 r2 r3 = = = ... = const. r2 r3 r4 Die gedämpfte Schwingung kann durch folgende Gleichung beschrieben werden: y = r ⋅ e −δt sin ωt δ ... Abklingkonstante Um eine ungedämpfte Schwingung zu erreichen ist es notwendig, im richtigen Moment die durch Reibung verloren gegangene Energie zuzuführen. Wird diese Energiezufuhr durch den schwingenden Körper gesteuert, so spricht man von Selbststeuerung oder Rückkopplung (Anwendung z.B. bei Pendeluhren). Erzwungene Schwingungen und Resonanz Wird ein schwingungsfähiges System durch einen einzigen Anstoß in Schwingungen versetzt, so nennt man dies eine freie Schwingung; der Körper schwingt mit seiner Eigenfrequenz f0. Seite 17 Mechanik 2 Wirkt auf einen Körper eine periodische äußere Kraft, so spricht man von einer erzwungenen Schwingung. Der Körper schwingt (nach einem Einschwingvorgang) mit der Frequenz f des Erregers. (Abb. aus Kraker-Paill Physik 2) Die Amplitude der Schwingung und die Phasenverschiebung zwischen Erreger und Oszillator hängt vom Verhältnis zwischen Eigenfrequenz und Erregerfrequenz ab. Maximale Energieübertragung findet statt, wenn die Erregerfrequenz gleich der Eigenfrequenz ist. In diesem Fall spricht man von Resonanz (und von Resonanzfrequenz). (Abb. aus Tipler, Physik) Resonanzerscheinungen: Kinderschaukel, Schiff (zum Schaukeln bringen), Stimme, Musikinstrumente, Singen im Badezimmer, Resonanzkatastrophe, zweidimensionale Resonanzmuster beim "Kochtopf", ... Seite 18 Mechanik 2 MECHANISCHE WELLEN Unter einer Welle versteht man einen Schwingungsvorgang in einem ausgedehnten Medium. Stellt eine Schwingung einen zeitlich periodischen Vorgang dar, so handelt es sich bei einer Welle um eine zeitlich und räumlich periodische Änderung einer physikalischen Größe. Damit sich eine mechanische Welle ausbreiten kann, muss eine Störung (bzw. Schwingung) eines Teilchens mit endlicher Geschwindigkeit auf Nachbarteilchen übertragen werden können. Bezüglich der Ausbreitung von Wellen gibt es drei Möglichkeiten: 1. längs einer linearen Anordnung von Teilchen (z.B. Seilwellen) 2. auf Oberflächen (z.B. Wasserwellen) 3. im Raum (z.B. Schallwellen) Man unterscheidet prinzipiell zwei Arten von Wellen: a) Transversalwellen: Die Teilchen schwingen normal zur Ausbreitungsrichtung der Welle ("Querwelle") Transversalwellen treten nur in festen Körpern auf, da nur diese eine Formelastizität besitzen (Ausnahme: Flüssigkeitsoberfläche mit Oberflächenspannung) b) Longitudinalwellen: Die Teilchen schwingen in Ausbreitungsrichtung der Welle ("Längswelle"; z.B. Schallwellen). Longitudinalwellen treten in Festkörpern, Flüssigkeiten und Gasen auf, da Körper aller Aggregatzustände Volumselastizität besitzen. Seite 19 Mechanik 2 Entstehung von harmonischen Wellen Bewegt man z.B. das Ende einer Saite in Form einer harmonischen Schwingung auf und ab, so breitet sich längs des Seils durch elastische Kopplung der Teilchen eine harmonische Welle aus. Jedes Teilchen führt dabei (zeitversetzt zu seinen Nachbarteilchen) eine Sinusschwingung aus. Bei einer fortschreitenden Welle wird keine Masse, sondern Energie transportiert. (Abb. aus Schreiner, Angewandte Physik) Der Abstand zweier nächstliegender Teilchen im gleichen Schwingungszustand heißt Wellenlänge λ. (Abb. aus Tipler, Physik) Während der Schwingungsdauer T eines Teilchens bewegt sich die Welle um eine Wellenlänge λ weiter. Daraus erhält man den Zusammenhang v= s λ 1 = = λ ⋅ = λf t T T Häufig wird für die Ausbreitungsgeschwindigkeit einer Welle der Buchstabe c verwendet. Die Grundgleichung der Wellenlehre erhält somit die Form c =λ⋅ f Seite 20 Mechanik 2 Führt ein Teilchen im Koordinatenursprung eine harmonische Schwingung aus, so gilt für seine Auslenkung zur Zeit t y = r ⋅ sin ωt Ein Teilchen im Abstand x vom Ursprung wird zur Zeit t + ∆t = t + x später von der Welle erreicht. c Für dieses Teilchen gilt: x y ( x, t ) = r ⋅ sin ω (t − ) c Diese Gleichung wird als Wellengleichung bezeichnet Ausbreitungsgeschwindigkeit von Wellen Je nach Ausbreitungsmedium gelten folgende Gesetze: c= c= E für Longitudinalwellen in Festkörpern; E ... Elastizitätsmodul, ρ ... Dichte ρ σ ρ für Transversalwellen bei gespannten festen Körpern (Saiten); σ= F ... A Zugspannung c= c= K für Longitudinalwellen in Flüssigkeiten; K ... Kompressionsmodul ρ κp ρ für Longitudinalwellen in Gasen, κ ... Adiabatenexponent, ρ ... Gasdruck Da die Dichte eines Mediums von der Temperatur abhängt. ist auch die Schallgeschwindigkeit temperaturabhängig. Beispiel: Schallgeschwindigkeit in Luft: bei t=0°C, p=1 atm = 1,013 bar, ρ=1,2928 kg/m³; κ=1,4 c= 1,4 ⋅ 1,013.105 m km = 331,2 ≈ 1192 1,2928 s h Temperaturabhängigkeit: c ≈ (331,6 + 0,6t ) m s t ... Temp. in °C (331,6ms-1 gemessener Wert bei 0°C) Schallgeschwindigkeit in Eisen (Eisenstab): E=21,1.1010 N/m², ρ=7870 kg/m³ Æ c = 5178 m/s Schallgeschwindigkeit im Wasser: c = 1403 m/s (bei 0°C) Seite 21 Mechanik 2 Wellenausbreitung Je nach Ausbreitungsmedium unterscheidet man eindimensionale Wellen (z.B. Seilwellen), zweidimensionale Wellen oder Flächenwellen (z.B. auf Wasseroberflächen) bzw. Kugelwellen im Raum. Die von einem punktförmigen Erregerzentrum ausgehenden Kreis- oder Kugelwellen bezeichnet man als Elementarwellen. Zur Veranschaulichung von Wellen dienen Wellenfronten und Wellenstrahlen. Eine Wellenfront verbindet Punkte eines Mediums, die von einer Welle gleichzeitig getroffen werden, sich also in der selben Schwingungsphase befinden. Der Abstand benachbarter Wellenfronten beträgt jeweils eine Wellenlänge. Wellenstrahlen stehen normal auf die Wellenfronten und zeigen in Ausbreitungsrichtung der Wellen. (Abb. aus Kraker-Paill, Physik 2) Überlagerung von Wellen Durchlaufen mehrere Wellen ein Medium, so kommt es zu deren Überlagerung (Superposition, Interferenz). Teilchen, die von mehreren Wellen getroffen werden, führen eine Schwingung aus, die sich aus Addition der einzelnen Auslenkungen ergibt. Dabei gilt das Prinzip der ungestörten Superposition, d.h. die Wellen beeinflussen sich gegenseitig nicht bzw. laufen nach dem gegenseitigen Durchdringen ungestört weiter. (Abb. aus Tipler, Physik) Seite 22 Mechanik 2 Interferenz eindimensionaler Wellen Wir betrachten den einfachen Fall der Überlagerung zweier Wellen gleicher Ausbreitungsrichtung und Frequenz. Eine wichtige Rolle bei der Überlagerung spielen die Schwingungsphasen, in der sich die beiden Wellen befinden (als Phase bezeichnet man das zeitl. und räumliche Argument der Schwingungsgleichung). Eine Phasenverschiebung entsteht z.B. durch unterschiedlich lange Laufwege der interferierenden Wellen. Der Unterschied der Laufwege wird dabei als Gangunterschied ∆x bezeichnet. Zur Beobachtung von Interferenzerscheinungen kann es nur dann kommen, wenn zwischen den beiden sich überlagernden Wellen ein zeitlich konstanter Phasenunterschied besteht. Man nennt die beiden Wellen dann kohärent (Kohärenz ist z.B. gegeben, wenn als Erreger von Kreiswellen zwei miteinander verbundene Stifte dienen, die periodisch ins Wasser der Wellenwanne eintauchen). (Abb. aus Tipler, Physik) Je nach Gangunterschied kann es bei der resultierenden Welle zu einer Verstärkung (konstruktive Interferenz) oder zu einer Abschwächung (destruktive Interferenz) kommen. Beträgt der Gangunterschied ein Vielfaches der Wellenlänge (∆x = k.λ ; k=0,1,2,3,...), so treten Interferenzmaxima auf; es kommt zur konstruktiven Interferenz. Bei ungeradzahligen Vielfachen von λ/2 (∆x = (2k+1).λ/2 ; k=0,1,2,...) kommt es zur destruktiven Interferenz (Abschwächung oder Auslöschung) der Wellen. (Abb. aus Tipler, Physik) Seite 23 Mechanik 2 Interferenz zweidimensionaler Wellen Der Abstand zweier benachbarter konzentrischer Kreise entspricht der Wellenlänge. An den Schnittpunkten der Kreise kommt es zum Zusammentreffen zweier Wellenberge Æ konstruktive Interferenz. Verbindet man alle Schnittpunkte jeweils desselben Gangunterschiedes, so erhält man die sog. Interferenzhyperbeln. Die Anzahl der möglichen Hyperbeln ergibt sich aus dem Abstand der beider Erregerzentren bzw. aus dem dadurch vorgegebenen maximalen Gangunterschied. (Abb. Eigenbau, Corel5) Schwebung Schwebung entsteht bei der Interferenz von Wellen mit geringem Frequenzunterschied. Überlagert man z.B. zwei Töne mit fast gleichen Frequenzen f1 und f2, so erhält man einen periodisch lauter und leiser werdenden Ton mit der Frequenz f = (f1 + f2) / 2 . Die Frequenz dieser Amplitudenänderung bezeichnet man als Schwebungsfrequenz fs. Für die Schwebungsfrequenz gilt fs=|f1 – f2|. (Abb. aus Tipler, Physik) Anwendung: beim Stimmen von Instrumenten Das Gehör ist in der Lage, bis ca. 20 Schwebungen pro Sekunde wahrzunehmen. Seite 24 Mechanik 2 Huygenssches Prinzip (Holländer Christian Huygens, 1678) Er entwickelte eine geometrische Methode zur Erklärung der Wellenausbreitung: Jeder Punkt einer bestehenden Wellenfront ist selbst wieder Ausgangspunkt einer Elementarwelle gleicher Frequenz und Ausbreitungsgeschwindigkeit. Die Einhüllende dieser Elementarwellen ergibt eine neue Wellenfront. Die mathematische Begründung, dass sich nämlich durch Interferenz der Elementarwellen unter Berücksichtigung der relativen Intensitäten und Phasendifferenzen tatsächlich wieder neue "Wellenfronten" ergeben, erfolgte nicht durch Huygens, sondern erst später durch den franz. Physiker Augustin Jean Fresnel (daher auch "Huygens-Fresnel´sches Prinzip"). (Abb. aus Tipler, Physik) Das Huygenssche Prinzip erweist sich als sehr brauchbar zur Beschreibung der Wellenausbreitung, da man damit sowohl die Reflexion, als auch Beugung und Brechung erklären kann. Reflexion Treffen Wellen auf eine ebene Fläche, so entstehen neue Wellen, die sich von dieser Fläche wegbewegen. Dieses Ausbreitungsphänomen von Wellen bezeichnet man als Reflexion. (Abb. aus Bergmann Schaefer, Band 1) Seite 25 Mechanik 2 Die Punkte A1, ..., B5 = A5 werden nacheinander von der Welle getroffen. Die von diesen Punkten ausgehenden Elementarwellen ergeben die neue Wellenfront B1, ..., B5. Aus der Konstruktion folgt das Reflexionsgesetz: Einfallswinkel und Reflexionswinkel sind gleich groß. Der reflektierte Strahl liegt dabei in der durch den einfallenden Strahl und der Flächennormale festgelegten Ebene. Reflexion einer Kreiswelle (oder Kugelwelle): (Abb. aus Bergmann Schaefer, Band 1) Die Reflexion von Schallwellen spielt vor allem in der Raumakustik eine wichtige Rolle (Echo, Nachhall, "schalltoter Raum", ...). Brechung Trifft eine Welle auf die Grenzfläche zweier Medien mit verschiedener WellenAusbreitungsgeschwindigkeit, so wird ein Teil der Energie reflektiert, ein Teil tritt über die Grenzfläche in das zweite Medium ein, wobei die Welle im zweiten Medium eine Richtungsänderung erfährt. Diese Richtungsänderung der Welle (dargestellt durch die Richtungsänderung des Wellenstrahls) bezeichnet man als Brechung. Da sich die Frequenz der Welle bei der Brechung nicht ändert (siehe Streuung e.m. Wellen), muss sich eine Änderung der Ausbreitungsgeschwindigkeit (gemäß der Beziehung c=λ.f) auf die Wellenlänge auswirken. Seite 26 Mechanik 2 Das Brechungsgesetz von Snellius ergibt sich aus obiger Konstruktion A5 B5 sin α A1 B5 A5 B5 c1t c1 = = = = A1 B1 sin β A1 B1 c2 t c2 A1 B5 Das Brechungs- und Reflexionsgesetz lassen sich nicht nur mit dem Huygensschen Prinzip herleiten. Eine noch einfachere Begründung liefert das Fermatsche Prinzip (Pierre de Fermat): Der Weg, den eine Welle beschreibt, wenn sie sich von einem Punkt zu einem anderen bewegt, ist stets so, dass die Zeit, welche die Wellen für das Zurücklegen des Weges benötigt, minimal ist. Beispiel: In einem Spiel besteht die Aufgabe, in der kürzesten Zeit von einem Punkt A zu einem Punkt B zu gelangen und dabei die Wand einmal zu berühren. (Abb. Kraker Paill, Physik 2) Welcher Weg ist zu nehmen, um in kürzester Zeit vom Punkt A am Strand zur Boje B im Meer zu gelangen? (Die Aufgabe könnte mit Hilfe einer Excel-Tabelle mit den Größen x, t, α, β empirisch gelöst werden!) Beugung Trifft eine Welle auf eine Öffnung in einem Hindernis, so wirkt die Öffnung wie eine Punktquelle von Kreiswellen, die sich von dieser Öffnung weg ausbreiten. Dieses Eindringen von Wellen in den geometrischen Schattenraum bezeichnet man als Beugung. a) Teilchenstrahl b) Welle beim Durchgang durch eine Öffnung (Abb. Tipler, Physik) Der Effekt wird umso deutlicher, je eher die Breite der Öffnung (oder des Hindernisses) mit der Wellenlänge übereinstimmt. Ist das Hindernis oder die Öffnung groß gegenüber der Wellenlänge, so kann die Beugung vernachlässigt werden (Vgl. Schallwellen ↔ Licht). Seite 27 Mechanik 2 Bemerkung: Die Ortung von Objekten durch reflektierte Wellen funktioniert nur dann, wenn deren Abmessungen nicht kleiner sind die Wellenlänge. Beim hörbaren Schall sind das bei 17 kHz ca. 2cm. Mit Ultraschall ist es möglich, wesentlich kleinere Strukturen aufzulösen. Der Doppler-Effekt Bewegen sich Sender und Empfänger einer Welle relativ zueinander, so nimmt der Empfänger eine Frequenzänderung wahr. Während es bei elektromagnetischen Wellen (Licht) keinen Unterschied ausmacht, ob sich der Sender oder der Empfänger bewegt, so erhält man bei Schallwellen für diese beiden Fälle unterschiedliche Ergebnisse. a) Ruhender Empfänger – bewegter Sender Bewegt sich der Sender auf den Empfänger zu, so werden die Wellenfronten in Bewegungsrichtung des Senders "zusammengeschoben". Abb.: bewegter Sender (Tipler) Während einer Schwingungsdauer T = 1/f0 würde sich die Welle um λ0 vom Sender entfernen. Diese Strecke wird auf λ = λ0 – v.T = λ0 – 1/f0 verkürzt d.h. der Empfänger registriert eine Welle mit kürzerer Wellenlänge bzw. höherer Frequenz f. λ = λ0 − v f0 aus c = λf bzw. λ = c c c v 1 = − = (c − v) folgt f f f0 f0 f0 1 1 c−v 1 v = = 1 − f f0 c f0 c f f = 0 v 1− c Entfernt sich der Sender vom Empfänger, so erhält man eine Frequenzverminderung: f = f0 1+ v c Seite 28 Mechanik 2 b) Ruhender Sender – bewegter Empfänger Bewegt sich der Empfänger mit der Geschwindigkeit v, so besitzen die Wellenfronten bzgl. des Empfängers die Geschwindigkeit c + v. Die wahrgenommene Frequenz f ist daher höher als die Senderfrequenz f0. f0 = f = c λ0 c+v λ0 = c+v c+v v = f0 ⋅ = f 0 ⋅ (1 + ) c c c f0 v c Bewegt sich der Empfänger vom Sender weg, so gilt f = f 0 ⋅ (1 − ) Bewegen sich sowohl Schallquelle als auch Schallempfänger mit den Geschwindigkeiten v und v', so erhält man die Gleichung v c f = f0 ⋅ v' 1− c 1+ Bei elektromagnetischen Wellen kommt es nur auf die Relativgeschwindigkeit zwischen Sender und Empfänger an. Es gilt dabei v ∆f v f = f 0 ⋅ (1 ± ) bzw. =± c f0 c Bedeutung bzw. Anwendung des Dopplereffekts: Geschwindigkeitsmessungen mit Radargeräten. Radarwellen werden vom Sender ausgestrahlt und vom fahrenden Auto als bewegter Empfänger und Sender reflektiert. Aus der Frequenzverschiebung ergibt sich die Geschwindigkeit des Fahrzeuges. Astrophysik: Rotverschiebung ferner Galaxien, ... Ist die Geschwindigkeit der Schallquelle größer als die Ausbreitungsgeschwindigkeit der Welle, so "überholen" sich die Wellenfronten gegenseitig – vor der Quelle befinden sich keine Wellen. Hinter der Quelle überlagern sich die Wellen zu einer Stoßwelle. Auf dem einhüllenden Kegelmantel entsteht ein großer Überdruck den der Beobachter als Knall wahrnimmt (Überschallknall). Abb.: Mach´scher Kegel (Tipler) Seite 29 Mechanik 2 Man bezeichnet eine Welle dieser Form auch als Kopfwelle (sie tritt auch als Bugwelle bei Schiffen auf, wenn die Fahrgeschwindigkeit größer als die Ausbreitungsgeschwindigkeit der Oberflächenwellen des Wassers ist). Der Druckkegel wird nach dem österr. Physiker Ernst Mach (1838-1916) als Machscher Kegel bezeichnet. Es gilt sin θ = vt v = ut u Das Verhältnis u/v heißt Machzahl. Stehende Wellen Stehende Wellen spielen in der Mechanik eine wichtige Rolle, wenn es um die Erklärung der Tonerzeugung bei Musikinstrumenten geht. Sie können als Sonderfall der Interferenz interpretiert werden, wobei zwei Wellen gleicher Frequenz und Amplitude einander entgegen laufen. Praktisch tritt dieser Fall in räumlich begrenzten Ausbreitungsmedien dadurch auf, dass eine Welle an einer Grenzfläche reflektiert wird und sich die reflektierte Welle mit der "einlaufenden" Welle überlagert. Bei der Überlagerung der Wellen ergeben sich ganz bestimmte stationäre Schwingungsmuster, die man als stehende Wellen bezeichnet. Vorüberlegung: Reflexion einer Welle am freien bzw. am festen Ende a) Reflexion am festen Ende (am dichten Medium) Bei der Reflexion einer Welle am "festen Ende" erfolgt ein Phasensprung wird als "Wellental" reflektiert. b) Reflexion am freien Ende (am dünnen Medium) ∆ϕ = π . Ein "Wellenberg" Bei der Reflexion am "freien Ende" erfolgt kein Phasensprung (ein Wellenberg wird wieder als Wellenberg reflektiert). Stehende Wellen können sich sowohl in Form stehender Transversalwellen bei Saiteninstrumenten als auch als stehende Longitudinalwellen bei Blasinstrumenten ausbilden. Seite 30 Mechanik 2 Eigenschwingungen einer Saite (zwei feste Enden) Bringt man eine an beiden Enden eingespannte Saite durch eine Auslenkung zum Schwingen, so können sich nur solche stationären Schwingungsmuster ergeben, die an den Saitenenden einen Schwingungsknoten besitzen. Die Schwingung mit der tiefstmöglichen Frequenz bezeichnet man als Grundschwingung (oder erste Harmonische), ihre Frequenz als Grundfrequenz f0. Alle möglichen Frequenzen, die eine stehende Welle ergeben, bezeichnet man als Resonanzfrequenzen oder Eigenfrequenzen der Saite. Für die Grundschwingung erkennt man folgenden Zusammenhang zwischen der Länge der Saite und der Wellenlänge bzw. der Eigenfrequenz: λ = 2l , v = λ. f 0 , f 0 = v λ = v 2l Für die erste Oberschwingung gilt λ = l und somit Für die n-te Oberschwingung gilt λ= f1 = v = 2. f 0 l 2l und somit f n = ( n + 1). f 0 n +1 Alle möglichen Obertöne (in diesem Fall einer Saite) bezeichnet man als Obertonreihe; Grundton und Obertonreihe als Frequenzspektrum eines Klanges. Abb.: Eigenfrequenzen einer Saite (Tipler). Mit K bezeichnet man die Knoten der stehenden Welle – an diesen Orten sind die Teilchen ständig in Ruhe. Bei B besitzt sie stehende Welle Schwingungsbäuche d.h. Teilchen, die mit maximaler Amplitude schwingen. Seite 31 Mechanik 2 Eigenschwingungen einer Luftsäule Bei stehenden Schallwellen in Luftsäulen (Anwendung z.B. Orgelpfeifen, ...) ist zu unterscheiden, ob die Luftsäule an beiden Enden offen ist (offene Pfeife), oder ob die Säule an einem Ende geschlossen ist (gedackte Pfeife). Für beide Fälle gilt, dass es am offenen Ende einen Bewegungsbauch geben muss, während am geschlossenen Ende ein Bewegungsknoten vorliegt. Die möglichen Eigenschwingungen ergeben sich aus der folgenden Grafik. Für die an einem Ende geschlossene Pfeife gilt für die Grundschwingung λ = 4l und somit für die v 4 4 4 . Die Oberschwingungen besitzen die Wellenlängen l , l , l ... und damit 4l 3 5 7 die Frequenzen f n = ( 2n + 1). f 0 Grundfrequenz f0 = Das Frequenzspektrum der offenen Pfeife stimmt mit jenem einer Saite überein, d.h. alle ganzzahligen Vielfachen der Grundfrequenz sind im Frequenzspektrum enthalten. Aus der Grafik und aus den daraus abgeleiteten Formeln erkennt man weiters, dass eine gedackte Pfeife um genau eine Oktave tiefer klingt als eine offene Pfeife (dass sie im Vergleich zu dieser nur halb so viele Obertöne enthält, macht sich in der Klangfarbe bemerkbar). Abb.: Eigenschwingungen einer "gedackten" und einer offenen Pfeife (Tipler) Beispiel: Welche Länge muss eine offene bzw. eine geschlossene Orgelpfeife haben, wenn ihr Grundton eine Frequenz von 20Hz besitzen soll? (Lösung: 8,5m; 4,25m) Seite 32 Mechanik 2 Akustik Brockhaus Lexikon: Akustik [grch. akouein >hören<] 1) Lehre von Schall, Teilgebiet der Mechanik (mech. Schwingungen und Wellen); umfasst die durch das Ohr wahrnehmbaren Schwingungen (Töne) von 20 Hz bis 20000Hz. 2) die Erforschung der Zusammenhänge zw. objektiven (physikal.) und subjektiven (psychischen) Gegebenheiten musikalischer Hörerscheinungen. ... Andere Begriffserkärung: Akustik beschäftigt sich mit der Phänomenen der Erzeugung, Ausbreitung und Wahrnehmung von Schallereignissen. Die menschliche Stimme und das Ohr Eine Luftsäule kommt im Kehlkopf (oberes knorpeliges Teil der Luftröhre) während des Ausströmens von der Lunge zwischen den mehr oder minder gespannten Stimmbändern zum Schwingen. Je nach Stellung von Gaumen, Zunge, Zähne und Lippen schwingen noch weitere Lufträume mit und ermöglichen es, einzelne Laute zu formen (z.B.: Vokal "O" kann durch Klopfen gegen die Wange erzeugt werden). Die Schallwellen werden von der Ohrmuschel aufgefangen und dringen durch den Gehörgang zum Trommelfell. Von diesem werden sie über die Gehörknöchelchen (Hammer, Ambos, Steigbügel) zum Innenohr übertragen, wo sie vom eigentlichen Gehörorgan, der mit Flüssigkeit gefüllten Schnecke aufgenommen werden (ein direkt an die Flüssigkeit angrenzendes Trommelfell würde die Schallwellen nur reflektieren. Das Hebelsystem der Gehörknöchelchen hilft hier aus). Äußeres Ohr Mittelohr Innenohr Gehörnerv Basilarmembran Gehörknöchelchen Trommelfell Eustachische Röhre Abb. schematische Darstellung des Ohrs Abb.: "aufgerollte" Schnecke im Innenohr Seite 33 Mechanik 2 Die je nach Tonhöhe kommt es auf der Basilarmembran an einem bestimmten Ort zur Resonanz, die an der schwingenden Membran hängenden Nervernfasern werden gereizt und leiten diesen Reiz an das Gehirn zur Verarbeitung weiter. Schallereignisse Schallwellen sind mechanische Longitudinalwellen. Ausgehend von der Schallquelle, einem schwingenden Körper, breiten sie sich in Form von periodischen Druckschwankungen (Druckwellen) im Raum aus. Schallwellen zwischen ca. 20 Hz und 20 kHz können vom menschlichen Gehör wahrgenommen werden. Schallwellen mit Frequenzen unter 20 Hz bezeichnet man als Infraschall, jene mit Frequenzen über 20 kHz als Ultraschall. Vergleich: Mensch: Hund: Frosch: Delphin: Fledermaus: 20 Hz bis 20 kHz 15 Hz bis 50 kHz 50 Hz bis 10 kHz 150 Hz bis 150 kHz 1 kHz bis 120 kHz Das physikalisch einfachste Schallereignis ist der (reine) Ton. Er wird durch eine harmonische Schwingung verursacht und enthält nur eine Frequenz des Hörbereichs (Stimmgabel, Sinusgenerator). Ein musikalischer, von einem Instrument erzeugter "Ton" wird in der Physik als Klang bezeichnet. Er wird durch Überlagerung vieler harmonischer Schwingungen erzeugt; der Grundton bestimmt dabei die "Tonhöhe", die Zusammensetzung der Obertöne die Klangfarbe. Ein Geräusch entsteht durch Überlagerung sehr vieler Töne mit eng benachbarten Frequenzen. Bei einem Geräusch erhält man kein diskretes Linienspektrum sondern ein kontinuierliches Spektrum (Spezialfall "weisses Rauschen"). Harmonische Analyse und Synthese Dass ein Klavier bei gleicher Tonhöhe anders klingt als eine Trompete hängt damit zusammen, dass beide Instrumente keinen reinen Sinuston erzeugen (sonst würden sie wirklich identisch klingen), sondern dass sich der Klang der Instrumente aus Grund- und Oberschwingungen verschiedener Intensität zusammensetzt. Die Zerlegung eines Klanges in seine harmonischen Bestandteile bezeichnet man als harmonische Analyse (Fourier-Analyse). In einem Frequenzspektrum wird ausgedrückt, welche einzelnen Sinusschwingungen in Summe einen bestimmten Klang ergeben. In der folgenden Grafik sind die Wellenformen dreier Klänge und ihre dazugehörigen Frequenzspektren dargestellt: Seite 34 Mechanik 2 Abb. aus Tipler, Physik Die Zusammensetzung spezieller Schwingungsformen, der Rechteck- und der Dreieckschwingung erkennt man aus folgender Grafik: Abb.: Schreiner, Angewandte Physik 1 Schallfeldgrößen Einen mit Schallwellen erfüllten Raum bezeichnet man als Schallfeld. Die wichtigsten Schallfeldgrößen sind Schalldruck und Schallintensität. Schalldruck Schallwellen in Luft sind Longitudinalwellen – i.a. periodische Dichte- bzw. Druckschwankungen, die sich mit Schallgeschwindigkeit ausbreiten. Diese Druckschwankungen überlagern sich dem normalen atmosphärischen Druck (Normalluftdruck 101,3 kPa =1013 hPa =101300 Pa; 1 Pa =1 N/m²). Am empfindlichsten ist das menschliche Gehör zwischen ca. 1 kHz und 5 kHz. In diesem Frequenzbereich werden Druckschwankungen schon als Schall wahrgenommen, wenn sie im Bereich von 20 µPa (=2.10-5 Pa =2.10-10 bar) liegen (Æ Hörschwelle). Das würde einer Höhendifferenz von Seite 35 Mechanik 2 ca. 0,0016 mm (!!) entsprechen. Die Auslenkungen der Luftmoleküle liegen dabei im Bereich von 10 pm. Die obere Grenze der wahrnehmbaren Druckschwankungen (Schmerzgrenze) liegt je nach Frequenz bei 20 bis 100 Pa (7 Größenordnungen darüber!). Dies entspräche einer Höhenänderung von ca. 8 m bzw. einer Auslenkung der Luftmoleküle von ca. 0,1 mm. Abb.: Eska, "Schall und Klang" (a) Hörschwellenkurve für einen 20-jährigen (b) und (c) Hörschwellenkurve für einen 40-jährigen bzw. 60-jährigen (d) Hörschaden eines Jugendlichen (e) Hörfläche für Musik und (f) für Sprache (g) Risikobereich für Gehörschädigung (100 dB) (h) Schmerzgrenze Schallintensität (Schallstärke) Man versteht darunter jene Energie, die pro Sekunde auf eine Fläche von 1 m² senkrecht zur Ausbreitungsrichtung auffällt (Dimension von I = Leistung pro Fläche). [I ]= W 2 . Die Intensität steigt mit dem Quadrat des Schalldrucks: I ~ p ; sie nimmt, wenn man die 2 m Dämpfung (Absorption durch schallabsorbierende Stoffe) nicht berücksichtigt, mit dem Quadrat der Entfernung zur Schallquelle ab: I~ 1 r2 Die kleinste wahrnehmbare Schallintensität (Hörschwelle) liegt bei 10-12 W/m², die Schmerzgrenze bei 1 W/m². Aufgrund des riesigen Empfindlichkeitsbereichs über 12 Größenordnungen, wird die Schallintensität auf einer logarithmischen Skala mit einem Bezugswert, der Schallintensität I0 bei der Hörschwelle, dargestellt. Dieser Logarithmus des Intensitätsverhältnisses wird auch als Schallpegel L, angegeben in Dezibel (dB), bezeichnet. Seite 36 Mechanik 2 Schallpegel: L = 10 ⋅ log I p = 20 ⋅ log I0 p0 Auch das Gehör besitzt eine logarithmische Empfindlichkeit; die kleinste noch wahrnehmbare Änderung des Schallpegels beträgt ca. 1 dB. Die 100 dB – Risikolinie entspricht einer Schalleistung von 0,01 W/m². Dies wird z.B. erreicht, wenn man einen Lautsprecher hätte, der 100 Watt hervorbrächte (Stereoanlage auf Vollanschlag) und den man sich in einer Entfernung von 10 m anhörte. Die gleiche Gefährdung ergäbe sich bei einem Kopfhörerknopf im Ohr mit nur 3 Milliwatt (!!) Leistung. In der Psychoakustik ist des Weber-Fechnersche Gesetz von Bedeutung. Es besagt, dass generell ein nichtlinearer Zusammenhang zwischen Stimulus (z.B. erregende Lautstärke (Schallintensität) eines Tons) und Empfindung (empfundene Lautheit) besteht, bzw. dass der gerade noch wahrnehmbare Reizzuwachs von der schon vorhandenen Erregung abhängt (∆R ~ R). Abb.: Eska, "Schall und Klang" Aufgaben: 1) Ein Kugelstrahler gibt eine Schallleistung von 0,1 Watt ab. Wie groß ist die Schallintensität in 3 m Entfernung? Wie groß ist die Schallleistung, die ein Mikrofon mit 3 cm² Empfangsfläche in dieser Entfernung empfängt? Seite 37 Mechanik 2 (Lösung: I=8,8.10-4 W/m²; P=2,7.10-7 W) 2) Ein Motorrad mit Schalldämpfer erzeugt in 4m Abstand eine Schallintensität von 10-4 W/m². Wie groß ist der Schallpegel? Um wie viel steigt der Schallpegel, wenn ein zweites, gleich lautes Motorrad dazukommt? Wie groß ist der Schallpegel bei 100 Motorrädern? (Lösung: 80 dB, +3 dB, 100 dB) Ultraschall Schall mit Frequenzen über der Hörgrenze des menschlichen Ohrs wird als Ultraschall bezeichnet (f > 20 kHz). Erzeugung von Ultraschall ¾ Mechanische Erzeugung: Galton-Pfeife: Metallpfeife mit (verstellbarer) Pfeifenlänge von wenigen Millimetern; f bis ca. 30 kHz ("Hundepfeife") ¾ Magnetische Erzeugung: Eisen- oder Nickelstäbe ändern im Magnetfeld ihre Länge (Magnetostriktion). Die Anregung erfolgt mit Wechselstrom in Resonanzfrequenz. ¾ Elektrische Erzeugung: Piezokristallplatten schwingen, wenn man an sie ein elektrisches Wechselfeld anlegt. Schwingungen bis 1010 Hz sind möglich. Eigenschaften von Ultraschall kurze Wellenlängen Æ können scharf gebündelt werden, werden erst an sehr kleinen Hindernissen gebeugt (hohe Auflösung) hohe Schallintensitäten (da I ~ f2) bis ca. 20 W/cm² (= 2.105 W/m² (!)) Anwendung von Ultraschall ¾ Echolot: Sende-Empfangskopf mit piezoelektrischem Kristall, Æ Laufzeitmessung Feststellung der Wassertiefe, Ortung von Fischschwärmen, ... Orientierung der Fledermäuse zerstörungsfreie Materialprüfung (Reflexion an Materialfehlern, Rissen, ...) Ausmessung der akustischen Eigenschaften von z.B. von Konzertsälen mit Hilfe von Modellen im entsprechenden Maßstab. ¾ Ultraschalldiagnostik: in der Medizin, Vorteil: keine Strahlenbelastung; Kopplungsmedium erforderlich ¾ Leistungsschall: Beispiel: Ultraschallquarz von 1 cm Dicke bei f=300 kHz: I=10 W/cm² im Wasser (v=1500 m/s) λ=0,5 cm: Druckunterschiede von +/- 10 bar, Beschleunigung der schwingenden Teilchen von ca. 700000 m/s² = 70000 g !! Erwärmung tieferer Schichten Reinigung, Mischen von Emulsionen sonst nicht mischbarer Stoffe (z.B. Öl und Wasser) Wasserzerstäuber bei Luftbefeuchtern, ... Seite 38 Mechanik 2 Mechanik deformierbarer Körper Festkörper – Flüssigkeiten – Gase Körper bestehen aus Atomen, Ionen und Molekülen. Diese Bausteine üben aufeinander Kräfte aus (Kräfte zwischen den Atomen – Ionenbindung, Metallbindung, Atombindung; Kräfte zwischen den Molekülen – Van der Waals-Kräfte). Von der kinetischen Energie der einzelnen Bausteine und der Stärke der intermolekularen Kräfte hängt der Aggregatzustand (fest, flüssig, gasförmig) eines Körpers ab. Festkörper Beim Festkörper ist die mittlere kinetische Energie der Teilchen kleiner als die Bindungsenergie. Die Atome oder Moleküle sind in festen Positionen angeordnet. Festkörper sind formbeständig (formelastisch) und volumsbeständig, d.h. sie setzen deformierenden Kräften einen hohen Widerstand entgegen. Kristalle sind ideale Festkörper; ihre Bestandteile bilden ein festes Raumgitter. Kristalle sind von ebenen Flächen begrenzt. Die Winkel zwischen diesen Flächen bestimmen die Kristallform. Kristalline Stoffe (z.B. Metalle) bestehen aus Mikrokristallen. Amorphe Körper befinden sich in einem Zwischenzustand zwischen fest und flüssig. Sie haben keine geordnete Raumstruktur (z.B. Harze, Teer, Glas) Verformungen fester Körper Unter dem Einfluss äußerer Kräfte kommt es zur Verformung fester Körper. Nimmt der Körper nach der Wegnahme der äußeren Kraft wieder seine ursprüngliche Form an, so spricht man von elastischer Deformation. Beim Überschreiten einer Elastizitätsgrenze kommt es zu dauernden (plastischen) Verformungen. Mechanische Spannung Unter Wirkung von Kraft und Gegenkraft steht ein Festkörper unter einem Spannungszustand (die Kräfte wirken in jedem Punkt des Körpers). Die mechanische Spannung gibt die Größe dieses Spannungszustandes an. Mechanische Spannung = Kraft Fläche σ= F A [σ ] = N m2 Je nach Richtung der Kraft unterscheidet man zwischen ♦ Druckspannung ♦ Zugspannung Æ Dehnung ♦ Schubspannung (Scherspannung) Æ Stauchung Æ Scherung Seite 39 Mechanik 2 Hooke´sches Gesetz Es beschreibt den linearen Zusammenhang (deshalb auch "lineares Kraftgesetz") zwischen Spannung und Dehnung z.B. eines stabförmigen Körpers. Das Hooke'sche Gesetz gilt nur im Proportionalitiätsbereich einer Verformung. Abb. aus Tipler, Physik Für die relative Längenänderung ε= Länge l gilt: ∆l eines Stabes mit einer Querschnittsfläche A und einer l ∆l F ~ bzw. ε ~ σ l A ε= 1 ⋅σ E ... Hooke'sches Gesetz E ... Elastizitätsmodul [E] = N/m² Nährungswerte für E: Aluminium............. 70.109 Nm-2 Stahl ..................... 200.109 Nm-2 Blei ....................... 16.109 Nm-2 Knochen Spannung ..... 16.109 Nm2 Scherung ...... 9.109 Nm2 Seite 40 Mechanik 2 Wirkt eine Kraft in Richtung der Oberfläche, an der sie angreift, so spricht man von Scherung, die Kraft nennt man Scherkraft FS und das Verhältnis der Scherkraft zur Fläche heißt Scherspannung τ= FS . A Abb. aus Tipler, Physik γ= 1 ∆x ∆x FS ~ = tan θ ... Scherung ; dabei gilt: bzw. γ ~ τ , γ = ⋅τ (G ... Schubmodul) l l A G Beispiel: Der Bizeps eines Mannes habe eines maximale Querschnittsfläche von 12 cm². Wie groß ist die Spannung im Muskel, wenn er eine Kraft von 300 N ausübt? (Lösung: σ=2,5.105 N/m²) Eine Masse von 500 kg werde an ein 3 m langes Stahlseil mit einem Querschnitt von 0,15 cm² gehängt. Um wieviel cm dehnt sich das Seil? (Lösung: ∆l=0,5 cm) Dichte Die Dichte ist das Verhältnis der Masse einer Substanz zu ihrem Volumen. ρ= m V [ρ ] = kg m³ Bei Festkörpern und Flüssigkeiten ändert sich die Dichte geringfügig mit dem Druck und der Temperatur. Die Dichte von Gases ist hingegen stark temperaturund druckabhängig (in Tabellen ist i.a. die Dichte von Gasen bei Standardbedingungen, d.h. bei Atmosphärendruck in Meereshöhe (p=1 atm) und bei 0°C angegeben). Seite 41 Mechanik 2 Flüssigkeiten Die Moleküle besitzen in Flüssigkeiten keine feste Lage, sondern sind relativ frei gegeneinander verschiebbar (es kann keine Scherspannung aufgebaut werden). Flüssigkeiten füllen daher Behälter beliebiger Form aus. Flüssigkeiten sind (wie auch Festkörper) inkompressibel, d.h. die relative Volumsänderung unter Druck ist sehr gering. Bei einer "idealen Flüssigkeit" werden die innere Reibung und die Kompressibilität überhaupt vernachlässigt. Oberflächenspannung Die Oberflächenspannung entsteht durch anziehende Kräfte zwischen den Molekülen einer Flüssigkeit. Für ein Teilchen an der Oberfläche heben sich die Kräfte in die verschiedenen Richtungen nicht auf – es entsteht eine resultierende Kraft nach Innen. Abb. aus Kraker-Pail, Physik 1 Gegen diese Kraft ist Arbeit zu verrichten, um ein Molekül aus dem Inneren einer Flüssigkeit an die Oberfläche zu bringen und damit die Oberfläche zu vergrößern (d.h. die Moleküle an der Oberfläche besitzen eine höhere potentielle Energie (Oberflächenenergie)). Die "Oberflächenspannung" ist daher keine Spannung sondern eine "Energie pro Flächeneinheit". Oberflächenspannung = [γ ] = J Nm N = 2 = 2 m m m Arbeit zur Oberflächenvergrößerung Oberflächenzuwachs γ= ∆W ∆A z.B.: Wasser γ=0,073 N/m, Quecksilber: γ=0,465 N/m Wegen der Oberflächenspannung nehmen kleine Flüssigkeitstropfen Kugelform an. Durch Spülmittel (Tenside) wird die Oberflächenspannung stark reduziert. Seite 42 Mechanik 2 Kapillarität Die anziehenden Kräfte zwischen den Molekülen einer Flüssigkeit heißen Kohäsionskräfte (Zusammenhangskräfte). Die Kraft zwischen einem Flüssigkeitsmolekül und einer anderen Substanz, z.B. der Wand einer dünnen Röhre, heißt Adhäsionskraft (Anhangskraft). Sind die Adhäsionskräfte groß gegenüber den Kohäsionskräften, so nennt man eine Flüssigkeit benetzend. Taucht man ein enges Röhrchen (Kapillare) in eine benetzende Flüssigkeit, so kommt es zu einem kapillaren Anstieg; bei einer nicht benetzenden Flüssigkeit zu einer kapillaren Depression. Für die Höhe des Anstiegs gilt dabei 1 h~ . r Auf der Kapillarwirkung beruhen die Saugfähigkeit poröser Stoffe (Schwamm, Löschblatt, Handtuch), das Aufsteigen von Öl in einem Docht, das Eindringen von Lötzinn in den Spalt zwischen Kupferrohren (verstärkt durch ein Flussmittel), die Speicherung von Wasser in der Erde, die Wasserversorgung von Pflanzen, u.s.w. Abb. aus Tipler, Physik Seite 43 Mechanik 2 Hydrostatischer Druck Darunter versteht man den Druck in ruhenden Flüssigkeiten. Dieser Druck kann durch einen Kolben von aussen erzeugt werden oder durch das Eigengewicht der Flüssigkeit entstehen (Schweredruck). Der Druck in einer Flüssigkeit macht sich als Kraft bemerkbar, die senkrecht auf jede Begrenzungsfläche wirkt: p= F A [ p] = N = Pa ( Pascal ) m2 es gilt weiters: 1 bar = 105 Pa Pascal'sches Prinzip: Wird auf eine in einem Gefäss eingeschlossene Flüssigkeit Druck ausgeübt, so verteilt sich dieser Druck ungehindert auf jeden Punkt in der Flüssigkeit und auf die Wände des Behälters. Dieses Prinzip bildet die Grundlage hydraulischer Maschinen. Abb. aus Tipler, Physik Schweredruck Der Schweredruck entsteht durch das Eigengewicht einer Flüssigkeit. Er ist abhängig von der Dichte der Flüssigkeit und der Höhe der Flüssigkeitssäule. Auf Grund der geringen Kompressibilität kann man die Dichte einer Flüssigkeit als konstant annehmen; daher nimmt der Druck linear mit der Tiefe zu: p= F mg ρVg ρAhg = = = = ρgh A A A A Für den Druck im Wasser in einer Tiefe h erhält man daher: p = p0 + ρgh p0 ... Atmosphärendruck Seite 44 Mechanik 2 Hydrostatisches Paradoxon Der Schweredruck ist unabhängig von der Form des Gefäßes. Abb. aus Tipler, Physik In verbundenen Gefäßen (kommunizierende Gefäße) ist der Flüssigkeitsspiegel überall gleich hoch (Anwendung: Schlauchwaage). Zu beachten ist, dass bei der Berechnung der Bodendruckkraft nicht die Gewichtskraft verwendet werden darf (außer bei lotrechten Wänden mit konstantem Querschnitt). Seite 45 Mechanik 2 Beispiel: Um wieviel cm steigt der Flüssigkeitsspiegel im rechten Rohr nach dem Öffnen des Hahns? (Lösung: 1,25 cm) Abb. aus Kraker-Paill, Physik 1 Auftrieb – Archimedisches Prinzip Ein Körper, der vollständig oder teilweise in eine Flüssigkeit eingetaucht ist, erfährt eine Auftriebskraft, deren Betrag gleich der Gewichtskraft der verdrängten Flüssigkeit ist. Die Auftriebskraft wirkt entgegen der Schwerkraft und greift im Schwerpunkt der verdrängten Flüssigkeit an (entspricht i.a. nicht dem Körperschwerpunkt). Abb. aus Kraker-Paill, Physik 1 FA = F2 − F1 = ρ F gA( h2 − h1 ) = ρ F gAh = ρ F gV = m F g Auf Grund des Auftriebs besitzt ein Körper in Flüssigkeiten ein scheinbar geringeres Gewicht als an der Luft: G ' = G − G F = ρgV − ρ F gV = gV ( ρ − ρ F ) Aus dem Verhältnis der Dichte des Körpers und der Flüssigkeit ergibt sich, ob der Körper in der Flüssigkeit schwimmt (ρ<ρF), schwebt (ρ=ρF) oder sinkt (ρ>ρF) (Beispiel: Eiswürfel schwimmen in Limonade, versinken jedoch in alkoholischen Getränken). Seite 46 Mechanik 2 Beispiel: Welcher Volumsanteil eines Eiswürfels (r=0,92 kg/dm³) ragt aus dem Meerwasser (r=1,025 kg/dm³)? G = FA mg = m F g ρV = ρ F V F VF ρ = V ρF 1− VF ρ = 1− V ρF V − V F ∆V ρ 0,92 = = 1− = 1− = 0,10 = 10% V ρF V 1,025 Dichtemessung von Flüssigkeiten mittels Aräometer (Senkspindel), z.B. Alkoholgehalt, Zuckergehalt, Säuredichte beim Akku. Der atmosphärische Luftdruck Zwischen den Molekülen eines Gases sind nur geringe Kräfte wirksam. Das Eigenvolumen der Gasmoleküle ist klein gegenüber dem Volumen, das dem Gas zur Verfügung steht (bei einem idealen Gas werden Eigenvolumen und zwischenmolekulare Kräfte überhaupt vernachlässigt). Aus diesem Grund können sich die Moleküle frei bewegen – ein Gas besitzt keine bestimmte Form und füllt jedes Volumen vollständig aus. Der Gasdruck in einem Gefäß wird durch die Stöße der Gasmoleküle auf die Gefäßwände verursacht. Beispiel: Hg hat bei 0°C eine Dichte von 13,595 kg/dm³. Wie hoch ist die Quecksilbersäule in einem U-Rohr-Barometer, wenn ein Druck von 1 atm = 101,325 kPa herrscht? (Lösung: h ≈ 760 mm) Seite 47 Mechanik 2 Bemerkung: Zur Angabe von Drücken werden in der Praxis häufig unterschiedliche, z.T. veraltete Einheiten verwendet; z.B. 1 Torr = 1 mmHg (von Torricelli). Es gilt folgender Zusammenhang: 1 atm = 760 Torr = 101,325 kPa = 1,01325 bar Der atmosphärische Luftdruck wird durch die Gewichtskraft der über jedem Flächenstück befindlichen "Luftsäule" hervorgerufen. Da sich Gase im Unterschied zu Flüssigkeiten stark komprimieren lassen, nimmt der Luftdruck mit der Höhe nicht linear ab. Für Höhen bis ca. 100 km gilt bei konstanter Temperatur die barometrische Höhenformel ph = p0 e − ρ 0 gh p0 Bei p0=101,325 kPa und 0°C in der gesamten Atmosphäre erhält man daraus ph = p0 e − h 7 , 99 km Berücksichtigt man die Temperaturabnahme mit der Höhe, so gelangt man zu der für Höhen bis 11000m (Troposphäre) gültigen internationalen Höhenformel: 6,5h ph = 101,3 kPa ⋅ 1 − 288 km 5, 255 Seite 48 Mechanik 2 Strömende Flüssigkeiten und Gase - Fluiddynamik Ideale Strömungen Ideale - reale Strömung ideale Flüssigkeit: inkompressibel und reibungsfrei; Idealisierung ist zulässig in der Hydrostatik und für einige Betrachtungen in der Hydrodynamik (vor allem bei kleinen Fließgeschwindigkeiten). Bernoulli-Gleichung ∆E pot = ∆mgy2 − ∆mgy1 = ρ∆Vg ( y2 − y1 ) ∆Ε kin = 1 1 1 ( ∆m)v2 2 − ( ∆m) v12 = ρ∆V (v2 2 − v12 ) 2 2 2 Damit neue Flüssigkeit nachströmt, muß folgende Arbeit verrichtet werden: (es gilt dabei: F1 = p1 A1 ) F2 = p2 A2 W1 = F1∆x1 = p1 A1∆x1 = p1∆V W2 = − F2 ∆x 2 = p2 A2 ∆x 2 = p2 ∆V Wges = p1∆V − p2 ∆V = ( p1 − p2 ) ∆V Der Energieerhaltungssatz liefert: Wges = ∆E pot + ∆E kin ( p1 − p2 ) ∆V = ρ∆Vg ( y 2 − y1 ) + 1 ρ∆V ( v12 − v2 2 ) 2 nach Division durch ∆V erhält man 1 ρ ( v12 − v2 2 ) 2 1 1 2 2 p1 + ρgy1 + ρv1 = p2 + ρgy 2 + ρv 2 2 2 1 p + ρ gy + ρ v 2 = konst ... Bernoulli-Gleichung 2 ( p1 − p2 ) = ρg ( y 2 − y1 ) + statischer Fall: v=0: p1 − p2 = ρg ( y2 − y1 ) = ρgh (ρgh ... statischer Druck, ½ ρv² ... Staudruck) Seite 49 Mechanik 2 Beispiel: Ausströmen einer Flüssigkeit aus einem Wassertank mit einem kleinen Loch im Abstand h unterhalb der Wasseroberfläche: 1 1 2 2 p1 + ρgh1 + ρv1 = p 2 + ρgh2 + ρv 2 2 2 p1 = p 2 , v1 = 0, h1 = h, h2 = 0 v = 2 gh ... Gesetz von Torricelli weitere Folgerung aus der Bernoulli-Gleichung: wenn y=konst gilt: p+ 1 2 1 ρv = konst d.h. p ≈ 2 2 v ...... bei zunehmender Geschwindigkeit sinkt der Druck. Dieser Effekt wird als hydrodynamisches Paradoxon (bzw. als Venturi-Effekt oder Magnusefekt) bezeichnet. Experimente dazu: • Ablenkung eines Wasserstrahls an einem Finger • Durchblasen zwischen zwei Papierblätter • Zerstäuber • Sogwirkung auf ein Dach bei Sturm • Kräfte zwischen auf paralleler Bahn fahrenden LKWs oder Schiffen • Tragflächen von Flugzeugen • Drall z.B. bei Tennisbällen Seite 50 Mechanik 2 Reale Strömungen (Viskose Strömungen) Laminare Strömungen Zwischen Festkörper und Flüssigkeit: Adhäsionskräfte In der Flüssigkeit (zwischen den Flüssigkeitsschichten): Kohäsionskräfte Æ "innere Reibung" (Bemerkung: Schmiermittel ersetzen äußere Reibung durch innere Reibung) Innere Reibung ist im Unterschied zur äußeren Reibung unabhängig von der Normalkraft. Sie hängt ab von • Größe der Berührungsfläche • Geschwindigkeit • Dicke der Flüssigkeitsschichte • Viskosität η (Zähigkeit) der Flüssigkeit F =η vA z Einige Werte für η (die Einheit ergibt sich aus der Umformung obiger Formel) Flüssigkeit Blut Glyzerin Motoröl (SAE10) Wasser Luft t [°C] 37 0 20 60 30 0 20 60 20 Abb. aus Tipler, Physik η [mPa.s] 4 10 000 1410 81 200 1,8 1,0 0,65 0,018 Abb. aus Kraker-Pail/Physik 1; Druck- und Geschwindigkeitsverlauf bei einer viskosen Strömung Durch innere Reibung wird in einem Rohr ein Druckabfall hervorgerufen. Dieser Druckabfall ist proportional dem Volumenstrom dV/dt. Es gilt Seite 51 Mechanik 2 ∆p ~ V& p2 − p1 = ∆p = V&R, R ... Reibungswiderstand 8ηl πr 4 somit ergibt sich für ∆p : R= ∆p = 8ηl & V πr 4 Hagen - Poiseullesches Gesetz (man beachte : R ~ 1/r 4 ! ) Bei einer Halbierung des Radius benötigt man für einen gegebenen Volumenstrom den 16fachen Druck! Beispiel: Verengung der Blutgefäße: Herz muss mehr pumpen. Gartenschlauch: vorgegebenes ∆p: Differenz zwischen Druck der Wasserquelle und dem Atmosphärendruck. Bei Vergrößerung des Durchmessers von ½" auf ¾" vergrößert sich der Volumenstrom ca. um das 5-fache (81/16 ≈5) Turbulente Strömungen Bei Überschreiten einer bestimmten "kritischen Geschwindigkeit" geht die laminare Strömung in eine turbulente Strömung über. Durch Wirbelbildungen steigt dabei der Strömungswiderstand schlagartig an (Energiesatz). Unterscheidung zwischen "Reibungswiderstand" einer laminaren Strömung und dem Gesamtwiderstand, der dann als "Strömungswiderstand" bezeichnet wird) Der Strömungswiderstand ist proportional dem Staudruck 1 FW = cW ⋅ ρv 2 A 2 1 2 ρv . Es gilt 2 cW ... Widerstandsbeiwert, A... Stirnfläche (Schattenfläche) des umströmten Körpers. Abb aus Kraker-Paill, Physik 1 Seite 52 Mechanik 2 GRAVITATION Die Erforschung der Planetenbewegung Das geozentrische Weltbild (Ptolemäisches Weltbild) Aristoteles (384-322 v.Chr.): "Die Erde besitzt Kugelgestalt". Beweis: Mondfinsternis Ptolemäus (ca. 90-160 n. Chr.): ♦ Die Erde steht im Mittelpunkt des Universums ♦ Das kugelförmige Himmelsgewölbe dreht sich mit den daran befestigten Sternen täglich einmal um die Erde. ♦ Die Sonne und der Mond bewegen sich in Kreisbahnen um die Erde. ♦ Die anderen Planeten bewegen sich auf komplizierten Bahnen, die durch Überlagerung von Kreisbahnen entstehen (Epizyklen) Seine Theorie hält sich über 1400 Jahre ! Das heliozentrische Weltbild (Kopernikanisches Weltbild) Nikolaus Kopernikus (1473-1543) 1. Die Sonne steht im Mittelpunkt der Welt 2. Sterne ruhen in großer Entfernung 3. Die Paneten, auch die Erde, bewegen sich auf Kreisbahnen um die Sonne 4. Die Erde dreht sich von W nach O täglich 1x um ihre Achse 5. Die Bahnebene der Erde heißt Ekliptik. In guter Näherung bewegen sich alle Planten in ihr 6. Die Rotationsachse der Erde ist um 23 ½ ° gegen die Ekliptiknormale geneigt (Æ Erklärung der Jahreszeiten!) Galileo Galilei: Anhänger und Verbreiter der kopernikanischen Lehre. Inquisitionstribunal 1633 in Rom Die Keplergesetze Tycho Brahe (1546-1601) lieferte genaue Beobachtungsdaten; Johannes Kepler (1571-1630) fand unter Verwendung dieser Daten empirisch die Gesetzmäßigkeiten der Planetenbewegung heraus: 1. Alle Planeten bewegen sich auf elliptischen Bahnen um die Sonne, wobei die Sonne in einem der Brennpunkte der Ellipse steht. 2. Die Verbindungslinie zwischen der Sonne und einem Planeten überstreicht in gleichen Zeiten gleich Flächen (Flächensatz). 3. Das Quadrat der Umlaufdauer eines Planeten ist proportional zur dritten Potenz seiner mittleren Entfernung (großen Halbachse der Ellipse) von der Sonne ( T1 : T2 = a1 : a 2 ) 2 2 3 3 Seite 53 Mechanik 2 Perihel: 147,1 Mio km Aphel: 152,1 Mio km Mittelwert: a = 149,6 Mio km ... Astronomische Einheit (AE) (lineare Exzentrizität: e = 0,0167) Das Newtonsche Gravitationsgesetz Kepler: empirisch aufgestellte Regeln Newton schrieb die Beschleunigung eines Planten auf seiner Bahn einer Kraft zu, die zwischen der Sonne und dem Planeten bzw. allgemein zwischen Körpern wirkt. Herleitung des Gravitationsgesetzes: M Vereinfachung: Planeten bewegen sich gleichförmig auf Kreisbahnen mv 2 2rπ v= r T m 2 rπ 2 m4π 2 r F= ( ) = r T T2 m 4π 2 r m 4π 2 r F1 = 1 2 1 F2 = 2 2 2 T1 T2 F= F1 m1 4π 2 r1T2 m rT = 2 = 1 1 22 2 F2 T1 m2 4π r2 m2 r2T1 2 T1 2 r1 3 = 3. Keplergesetz: T2 2 r2 3 2 somit ist Seite 54 Mechanik 2 3 2 F1 m1r1r2 m1r2 = 3 = F2 m2 r2 r1 m2 r1 2 m1 r1 2 = m2 r2 2 woraus folgt: F1 = C ⋅ m1 m2 und F2 = C ⋅ 2 2 r1 r2 Da die Anziehungskraft von der Masse des Zentralgestirns M abhängt, schreibt man für C = G.M, und erhält: F = G⋅ M ⋅m r2 Newtonsches Gravitationsgesetz (1686 veröffentlicht): r m1 F = G⋅ m2 m1 m2 r2 G... (universelle) Gravitationskonstante G = 6,67.10-11 Nm2kg-2 m1, m2 ... Massen r ... Abstand der Schwerpunkte von m1, m2 Messung von G: Henry Cavendish (1731-1810) erst 1798 mit Hilfe einer Drehwaage. Newton ging von einer Abschätzung der Erdmasse aus und erhielt so einen Näherungswert für G. Beispiel: Berechnen Sie die Kraft, mit der sich die Erde und ein Körper der Masse m=1kg an der Erdoberfläche anziehen. r = 6370 km (mittlerer Erdradius); me = 5,97.1024 kg F= 6,67.10 −11 .5,97.10 24 .1 = 9,813N andererseits weiß man ( 6370.10 3 ) 2 F=m.g = 1.g woraus folgt: g=9,81 ms-2 Berechnen Sie die Kraft, mit der sich ein Mann (m=70kg) und eine Frau (m=50kg) zueinander hingezogen fühlen, wenn der Abstand zwischen ihnen 50cm beträgt und die beiden als Punktmassen betrachtet werden. F= 6,67.10 −11 .50.70 . −7 N = 9,310 0,52 allgemeiner Zusammenhang: g ( r ) = G. m , d.h. die Fallbeschleunigung hängt von der Masse m r2 des anderen Körpers und dem Abstand r ab (beträgt also nur auf der Erde 9,81 ms-2). Beispiel: Berechnen Sie die Fallbeschleunigung eines Körpers, der sich 200 km über der Erdoberfläche befindet. g= G. M E RE 2 G. M E = g . R E 2 G. M E r = R E + 200km r2 R g. R E 2 m 6370km 2 m = g. ( E ) 2 = 9,81 2 . ( ) = 9,22 2 a= 2 r r s 6570km s a= Seite 55 Mechanik 2 Potentielle Energie eines Körpers im Gravitationssfeld Berechnung der Arbeit, die zum Verschieben eines Körpers der Masse m gegen die Gravittationskraft zu verrichten ist: W = F ′′. s v v W = F. s Die Kraft bleibt während der Fallbewegung nicht konstant, sondern ändert sich in Abhängigkeit des Abstandes r: F ( r ) = G. m. M r2 die Arbeit ist daher mittels Integral zu berechnen: 1 m. M dr = − G. m. M . |rrba = 2 r r 1 1 1 1 = − GmM ( − ) = GmM ( − ) rb ra ra rb rb rb ra ra W = ∫ F (r )dr = ∫ G. Der Term GmM 1 entspricht also der potentiellen Energie eines Masseteilchens im r Gravitationsfeld. Die potentielle Energie, die ein Körper der Einheitsmasse m=1kg im Gravitationsfeld der Masse M hat, nennt man das Potential V: V =− GM r Der Körper muß dabei keine geradlinige Bahn beschreiben: Jeder Weg lässt sich aus radialen Anteilen und aus Bogenanteilen zusammensetzen. Längs der Bogenanteile wird keine Arbeit verrichtet, da Kraft und Weg aufeinander normal stehen (vergleiche Bewegung einer Ladung im elektrostatischen Feld ! Äquipotentiallinien (-flächen)) Seite 56 Mechanik 2 Die Fluchtgeschwindigkeit (2. kosmische Geschwindigkeit) Fragestellung: "Welche Anfangsgeschwindigkeit benötigt ein Körper, um das Gravitationsfeld der Erde zu verlassen?" Anders formuliert: "Welche Arbeit muß gegen das Gravitationsfeld verrichtet werden, um einen Körper von der Erde aus unendlich hoch zu heben?" W = GmM ( 1 1 − ) ra rb W = GmM . 1 R ra = R...Erdradius, rb = ∞ mv 2 1 = GmM . R 2 m km 2GM 2GM 2.6,67.10 −11.6.10 24 m v = , v= = = 11200 = 11,2 3 R R s s s 6370.10 2 oder mit GM = gr 2 erhält man v = km 2 gR 2 = 2 gR ≈ 11,2 R s Vergleich: auf der Mondoberfläche beträgt v ≈ 2,4km/s. Diese Geschwindigkeit wird von Gasteilchen schon bei Zimmertemperatur überschritten Æ der Mond kann aufgrund seiner geringen Masse keine Atmosphäre besitzen. Die Kreisbahngeschwindigkeit (1. kosmische Geschwindigkeit) mv 2 mM = G. 2 r r GM v2 = v= r GM r nahe der Erdoberfläche gilt r = R und somit v ≈ 7,9 (ergibt sich auch aus v = gr 2 = r km s gr ) d.h. v hängt nicht von der Masse m sondern vom Abstand r ab! Seite 57 Mechanik 2 Beispiel: a) Welche Geschwindigkeit muß ein Space Shuttle besitzen, um antriebslos in einer Höhe von 160km die Erde zu umkreisen? v= GM = R+h 6,67.10 −11 .610 . 24 km km . 3 = 28183 3 = 7,810 s h (6370 + 160).10 b) Berechnen Sie die Umlaufzeit eines Space Shuttle 2 rπ T 2(r + R)π 2.(6370 + 160).10 3 π 1 T= = s = 5260s = 1,46h ≈ 1 h !! 3 v 2 . 7,810 v= Beispiel: Berechnen Sie die Höhe der Umlaufbahn eines geostationären Satelliten. Hinweis: geostationäre Satelliten besitzen eine Umlaufzeit von genau 23h56Min (=86160s)! GM r 2 rπ v= T GM 2 rπ = T r 2 2 4r π GM = 2 r T GM 2 ... r 3 ~ T 2 r3 = T 4π 2 r = 3 ... = 4,2219.10 7 m h = r − R = 35849 km ≈ 36000km v= Bemerkung: Aus der Beziehung r = 3 GM 2 T des vorigen Beispiels kann bei bekannter Umlaufzeit 4π 2 und Bahnradius eines Mondes die Masse eines Planeten bestimmt werden. So hat z.B. der Mars hat einen Mond mit einer Umlaufdauer von 460 min und einem mittleren Bahnradius von 9,4.106m. Wie groß ist die Masse des Mars? M= 4π 2 r 3 =... = 6,4510 . 23 kg GT 2 Seite 58