Physik I-IIfür Informatiker
Werbung

Physik I-II
für Informatiker
Abteilung IIIc
ETH/Zürich
(WS 2000/01 – SS2001)
Prof. Dr. André Rubbia
Übungschef: Dr. Andreas Badertscher
Kapitel 0
Kapitel 1
Kapitel 2
Physik
Vorwort
11
Was ist Physik? 11
Die experimentelle Methode 12
Kinematik 15
Bewegung in einer Dimension 16
Massenpunkte oder Teilchen 16
Beschreibung der Bewegung 17
Bewegung in einer Dimension 21
Der Begriff der Geschwindigkeit 23
Momentane Geschwindigkeit 26
Der Begriff der Beschleunigung 29
Integration 32
Einige spezielle Bewegungsvorgänge 33
Beschleunigung durch die Gravitation 37
Bewegung in zwei oder drei Dimensionen 40
Der Ortsvektor 42
Der Geschwindigkeitsvektor 45
Der Beschleunigungsvektor 47
Zerlegung der Bewegung – Komponenten 49
Demonstrationsexperiment: Wurf im bewegten
System 51
Demonstrationsexperiment: Schuss auf fallende
Platte 54
Gleichförmige Kreisbewegung 57
Masse, Impulserhaltung und die
Mechanik 63
Masse 64
Die Definition der Masse 64
Träge und schwere Masse 67
Die Definition des Impulses 69
Der Impuls 69
Das allgemeine Gesetz 72
Die Impulserhaltung 72
1
2
Kapitel 3
Physik
Das erste Newtonsche Gesetz: Trägheit 74
Das zweite Newtonsche Gesetz: Aktionsprinzip 76
Die Definition der Kraft 76
Das zweite Newtonsche Gesetz 78
Das Newtonsche Gravitationsgesetz 79
Gravitationskraft eines homogenen Rings 82
Gravitationskraft einer homogenen Kugelschale 85
Gravitationskraft einer homogenen Vollkugel 88
Die Erdbeschleunigung 89
Satellitenbewegung 93
Rückstoss der Rakete 99
Berechnung der Bewegungen mit Hilfe der
Kräfte 103
Die Federkraft 104
Fadenkräfte 107
Die Atwoodsche Maschine 109
Reibungskräfte 113
Energie 117
Definition der Energie 118
Die relativistichen Grössen 120
Die Lichtgeschwindigkeit als
Grenzgeschwindigkeit 120
Die relativistische Masse 122
Der relativistische Impuls 125
Langsam bewegte Teilchen 130
Die Masse-Energie Äquivalenz 126
Die kinetische Energie 128
Potentielle Energie der Gravitation 132
Die Arbeit 135
Bewegung in einer Dimension 135
Bewegung in mehreren Dimensionen 137
Das Arbeit-Energie Theorem 139
Allgemeine potentielle Energie 141
Konservative und nicht-konservative Kräfte 141
Mechanische Energie 143
Kapitel 4
Kapitel 5
Physik
Beziehung zwischen Kraft und potentieller
Energie 145
Allgemeine potentielle Energie der
Gravitationskraft 147
Schwingungen und Resonanz 151
Harmonische Schwingungen 151
Sinus- und Kosinusförmige Bewegung 151
Horizontale Bewegung mit Federkraft
(Federpendel) 155
Vertikale Bewegung mit Federkraft und aufgehängter
Masse 157
Differentialgleichung der harmonischen
Bewegung 158
Das Fadenpendel 161
Versuchsexperiment: Vergleich des Feder- und
Fadenpendels 164
Energieerhaltung bei harmonischen
Schwingungen 165
Gedämpfte harmonische Schwingungen 167
Erzwungene Schwingungen und Resonanz 171
Mechanische Wellen 179
Was sind Wellen? 179
Seil- oder Saitenwellen 179
Ausbreitungsgeschwindigkeit transversaler elastischer
Seilwellen 181
Allgemeine Lösung der Wellengleichung 184
Ausbreitungsgeschwindigkeit von Seilwellen 186
Prinzip der Superposition 188
Harmonische Wellen 190
Superposition harmonischer Wellen 191
Stehende Wellen 194
Eigenschwingungen eines Seils 194
Wellenfunktionen stehender Wellen 197
Wellen im Festkörper 198
3
4
Kapitel 6
Physik
Relativität 203
Relativbewegung 203
Transformation von einem Bezugssystem ins
andere 204
Inertialsysteme 207
Scheinkräfte 209
Rotierendes Bezugssystem 210
Die Zentrifugalkraft 211
Die Corioliskraft 213
Die Erde als ein Nicht-Inertialbezugssystem 216
Die Galileische Transformation 223
Komponentendarstellung 225
Das Ereignis 226
Bestimmung der Ausbreitungsgeschwindigkeit einer
Welle 230
Bestimmung der Lichtgeschwindigkeit 234
Das Michelson-Morley Experiment 237
Das Postulat der konstanten Lichtgeschwindigkeit 241
Die Lorentz-Transformation 242
Die spezielle Relativitätstheorie 246
Prinzip der Relativität 246
Die Einsteinschen Postulate 249
Invarianz des Raumzeit-Intervalls 250
Eigenzeit und Zeitdilatation 252
Der ganze Weltraum gehört uns 258
Längenkontraktion 259
Die Geschwindigkeitstransformation 260
Gleichzeitigkeit 262
Der relativistiche Energie-Impuls Vektor 268
Die Rot- und Blauverschiebung des Lichts 273
Eine Übersicht der allgemeinen
Relativitätstheorie 279
Das Gravitationsfeld 280
Das Äquivalenzprinzip 282
Die Gravitationsrotverschiebung 283
Die Ablenkung von Licht 286
Schwarze Löcher 290
Kapitel 7
Kapitel 8
Physik
Teilchen, Atome und Moleküle 295
Teilchensysteme 295
Der Schwerpunkt 295
Kontinuierliche Massenverteilung 298
Innere und äussere Kräfte 301
Dynamik des Schwerpunkts 303
Das ballistische Pendel 309
Das Schwerpunktssystem 311
Kinetische Energie des Teilchensystems 314
Gesamtenergie eines Teilchensystems 315
Stossvorgänge 316
Stossvorgänge im Labor- und SP-Bezugssystem 319
Elastischer Stoss in zwei Dimensionen 321
Relativistischer Stoss 324
Atome 327
Die Bausteine der Materie 327
Die Elektrische Ladung 328
Das Coulombsche Gesetz 330
Das Atom und die Elemente 335
Das klassische Atom-Modell 337
Der Kern der Atome 341
Die Isotope 346
Moleküle 349
Die Avogadro-Zahl 357
363
Die Phasen der Materie 358
Mikroskopische Beschreibung der Materie 360
Temperatur und Gase
Die Brownsche Molekularbewegung 363
Thermische Ausdehnung 367
Die Temperatur und das Gasthermometer 371
Das Gasthermometer 372
Die absolute Temperatur und die Kelvin-Skala 376
Gase 378
Die Zustandgleichung für ideale Gase 378
Mikroskopische Beschreibung des Gases 381
5
6
Kapitel 9
Kapitel 10
Physik
Wärmekapazität 386
Wärmekapazität und Wärmeenergie 388
Wärmekapazität eines (einatomigen, idealen)
Gases 390
Wärmekapazität eines Festkörpers 391
Latente Wärme 394
Klassischer Gleichverteilungssatz 395
Wärmekapazitäten und die klassische
Mechanik 401
Wärmekapazitäten von Gasen 401
Anomale Wärmekapazitäten von Festkörpern 403
Schlussbemerkung 404
Thermodynamik 407
Hauptsätze der Thermodynamik 407
Mechanische Arbeit eines expandierenden
Gases 410
Die Wärmekapazitäten CV und Cp 411
Thermische Prozesse des idealen Gases 414
Isobare Zustandsänderung 414
Isotherme Ausdehnung und Umwandlung von Wärme in
mechanische Arbeit 416
Adiabatische Ausdehnung 419
Wärmemaschine 425
Die Entropie 429
443
Der Carnotsche Kreisprozess 430
Wärmemaschine mit maximalem Wirkungsgrad 436
Die Definition der Entropie 438
Eigenschaften der Entropie 440
Drehbewegung
Der Drehimpuls 443
Definition des Drehimpulses 443
Erhaltung des Drehimpulses 446
Die Bewegung starrer Körper 450
Kapitel 11
Physik
Die Winkelgeschwindigkeit 451
Gesamte Energie eines starren Körpers 453
Berechnung des Trägheitsmoments 457
Rollende Körper 460
Drehimpuls eines starren Körpers 463
Hauptachsen eines Körpers 465
Dynamik der starren Körper 466
Erhaltung des gesamten Drehimpulses 469
Elektromagnetismus 471
Elektrische und magnetische Felder 471
Das elektrische Feld 471
Das elektrische Feld und die Relativität 474
Die Lorentz-Kraft 480
Feldlininen 483
Elektrische Feldlinien 483
Magnetische Feldlinien 486
Elektrischer Strom 487
Berechnung der elektrischen und magnetischen
Felder 492
Berechnung des E-Feldes 494
Berechnung des B-Feldes 497
Bewegte Ladungen in elektrischen und magnetischen
Feldern 501
Elektrische potentielle Energie und elektrisches
Potential 501
Das Elektronvolt 503
Bewegung einer Punktladung in einem elektrischen
Feld 504
Bewegung einer Punktladung in einem magnetischen
Feld 504
Der Fluss und die Divergenz 509
Die Definition des Flusses 509
Der elektrische und magnetische Fluss 511
Die Divergenz des Feldes 516
Gesetz für das elektrische Feld 521
Das Gauss’sche Gesetz 520
7
8
Kapitel 12
Physik
Berechnung des elektrischen Feldes mit Hilfe des
Gauss’schen Gesetzes 523
Gesetz für das magnetische Feld 525
Stromdichte und Ladungserhaltung 528
Das Linienintegral eines Feldes 532
Linienintegral über eine Kurve 532
Theorem von Stokes 533
Rotation des Feldes und konservative Felder 536
Das Ampèresche Gesetz 538
Maxwellsche Gleichungen 543
Gesetz von Faraday (Induktionsgesetz) 545
Die induzierte Spannung 545
Das Ohmsche Gesetz 551
Der induzierte Strom 553
Induktion durch Bewegung 556
Elektromagnetische Wellen 559
Felder eines bewegten geladenen Drahtes 559
Die elektromagnetischen Wellen 568
Die Wellengleichung und die
Ausbreitungsgeschwindigkeit 568
Harmonische ebene Wellen 573
Ebene Wellen 570
Das elektromagnetische Spektrum 575
Die Polarisation 577
Energie und Impuls der elektromagnetischen
Wellen 580
Der Poynting-Vektor 580
Elektromagnetischer Druck 582
Wellentheorie der elektromagnetischen Wellen 584
Das Prinzip von Huygens 585
Interferenz der elektromagnetischen Wellen 588
Beugung am Doppelspalt 590
Beugung am Einzelspalt 593
Kapitel 13
Physik
Quantenmechanik 601
Einleitung 601
Die Quantisierung des Lichts 603
Die Wellennatur der Teilchen 606
Die Hypothese von de Broglie 606
Ein Elektron in einem Kasten 608
Die Schrödinger-Gleichung 614
Die stationären Zustände 617
Die Interpretation der Wellenfunktion 619
Überlagerung von Zuständen 622
Elektron durch Doppelspalt 624
Die Unschärferelation 629
Röntgen- und Elektronenbeugung 637
Röntgenbeugung 637
Elektronenbeugung 642
Mehr Quantisierung 644
Elektronen in Atomen 645
Rotation und Vibration von Molekülen 651
Das EPR-Paradoxon 653
Eine weitere Unschärferelation 658
9
10
Physik
Kapitel 0
Vorwort
0.1 Was ist Physik?
Das Wort kommt von einem griechischen Ausdruck für Natur. Die
Physik sollte eine Wissenschaft sein, die alle natürlichen Phänomene
untersucht.
Heute können wir sagen:
Die Physik stellt sich die Aufgabe, die Bestandteile der Materie und ihre Wechselwirkungen miteinander zu untersuchen.
Die Eigenschaften der Materie und andere natürliche
Phänomene werden mittels dieser Wechselwirkungen erklärt.
11
Die Materie besteht aus elementaren Teilchen und wir sind an den
Wechselwirkungen zwischen diesen Teilchen interessiert. Diese
Wechselwirkungen schaffen die Strukturen der Materie, die wir kennen.
Physik
12
Vorwort
0.2 Die experimentelle Methode
Die Physik stützt sich auf Beobachtungen und Versuche. Wir verstehen als Versuch ein Experiment, bei dem man ein Phänomen beobachtet, das unter vorher festgelegten und kontrollierten
Bedingungen abläuft.
Der Physiker/in findet Modelle und Regeln, um diese Beobachtungen
zu beschreiben. Diese Regeln sind in der mathematischen Sprache
ausgedrückt, weil man versucht, diese in quantitativer Art auszudrücken.
Wie wird man ein Phänomen beobachten? Die Beobachtungen
müssen zu einer quantitativen Information führen. Man spricht von
Messungen.
Eine Messung ist eine Technik, mit deren Hilfe wir einer physikalischen Grösse eine Zahl zuordnen kann. Diese Zahl ist das
Ergebnis eines Vergleichs mit einer ähnlichen, standardisierten Grösse (die Einheit).
Für jede Grösse, die wir messen wollen, müssen wir zuerst eine Einheit wählen. Gewöhnlich benutzt man das Internationale Einheitensystem (SI-System). Dieses System (auch das MKSA-System
genannt) hat die folgenden vier fundamentalen, unabhängigen Grössen:
Länge:
Sekunde (s)
Meter (m)
Fundamentale Einheit
Zeit:
Kilogramm (kg)
Ampère (A)
Masse:
Elektrischer Strom:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die experimentelle Methode
Alle anderen Grössen werden durch mathematische Beziehungen
dieser vier Grössen ausgedrückt.
Die Definitionen der Basisgrössen des MKSA-Systems und von drei
zusätztlichen Grössen, die das ganze SI-System darstellen, sind in
Tabelle 1 aufgelistet.
Meter (m)
MKSA Einheit
Definition
Einheitensystem (SI-System) : Basisgr ssen
Grösse
Der Meter ist die Länge des
Weges, den das Licht in
Vakuum im 1/299 792 458
ten Teil einer Sekunde
zurücklegt.
TABLE 1. Internationales
Länge
Sekunde (s)
Zeit
13
Die Sekunde ist die Zeitdauer von 9 192 631 770
Schwingungsperioden einer
Strahlung, die dem Übergang zwischen den zwei
Hyperfeinstrukturniveaus
des Grundzustandsniveaus
eines 133Cs Atoms entspricht.
Physik
14
Vorwort
Kilogramm (kg)
MKSA Einheit
Definition
Einheitensystem (SI-System) : Basisgr ssen
Grösse
Das Kilogramm ist die
Masse eines internationalen
Prototyps des Kilogramms.
Es ist ein Platin-IridiumZylinder, der im Bureau
International des Poids et
Mesures in Sèvres bei Paris
aufbewahrt ist.
TABLE 1. Internationales
Masse
Ampère (A)
Elektrischer Strom
Durch zwei unendlich lange,
gerade Leiter mit vernachlässigbarem Querschnitt fliesst
ein konstanter Strom von
einem Ampère, wenn in
einem Abstand von einem
Meter im Vakuum eine Kraft
von 2.10–7 Newton pro Längenmeter auf die Leiter
wirkt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 1
Kinematik
Wir beginnen die Vorlesung mit der klassischen Mechanik. Eine
genaue Beschreibung von diesen Bewegungsvorgängen ist wichtig
für ein Verständnis der physikalischen Welt.
Viele Wissenschaftler haben zum Fortschritt der klassichen Mechanik
beigetragen, wie zum Beispeil, Archimedes (-287– -212), Galileo
Galilei (1564-1642), Copernicus (1473-1543), Tycho Brahé (15461601) und J. Kepler (1571-1630). Der besser bekannte Schöpfer der
klassischen Mechanik ist natürlich Sir Isaac Newton (1642-1727).
Seine drei Newtonschen Gesetze sowie sein Gravitionsgesetz bilden
die Basis der gesamten Mechanik.
15
Im Rahmen der Kinematik wird die Bewegung eines Teilchens rein
geometrisch charakterisiert. Die physikalischen Gesetze, die die
Bewegung regeln, werden wir nachher im Rahmen der Dynamik
studieren.
Physik
16
Kinematik
1.1 Bewegung in einer Dimension
In diesem Kapitel werden wir uns mit der Beschreibung von Bewegung
beschäftigen
(der
sogenannten
Kinematik).
Die
Bewegungsvorgänge finden in “etwas”, das wir Raum und Zeit nennen, statt.
Ein Körper ist relativ zu einem anderen in Bewegung, wenn sich
seine Lage, gemessen relativ zum zweiten Körper, mit der Zeit
verändert. Andererseits sagt man, dass ein Gegenstand sich relativ in
Ruhe befindet, wenn sich seine relative Lage mit der Zeit nicht
verändert.
Sowohl Ruhe wie Bewegung sind relative Begriffe.
Zum Beispiel sind ein Haus und ein Baum relativ zur Erde in Ruhe,
aber sie sind relativ zur Sonne in Bewegung.
Wenn ein Zug durch eine Station fährt, sagen wir, dass sich der Zug
relativ zur Station in Bewegung befindet. Ein Passagier des Zuges
könnte aber genausogut sagen, dass sich die Station relativ zum Zug
in Bewegung befindet, und zwar in entgegengesetzter Richtung.
1.1.1 Massenpunkte oder Teilchen
Um unsere Betrachtung von Bewegung zu vereinfachen, beginnen
wir zunächst mit Gegenständen, deren Position im Raum durch die
Angabe der Koordinaten eines Punktes beschrieben werden kann.
Einen solchen Gegenstand nennen wir ein Teilchen.
Man spricht auch von Massenpunkt und meint damit einen idealisierten Körper, dessen Masse in einem Punkt konzentriert ist.
Wir studieren die Bewegung makroskopischer Körper, die als solche
Massenpunkte betrachtet werden können. In diesem Fall verstehen
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in einer Dimension
wir als Massenpunkt einen Körper, dessen räumliche Ausdehnung als
vernachlässigbar betrachtet werden soll.
Für manche Zwecke ist es z.B. sinnvoll, die Erde als Teilchen zu
betrachten: in diesem Fall bewegt sich das Teilchen “Erde” auf einer
fast kreisförmigen Bahn um die Sonne.
Der Begriff des Massenpunktes ist natürlich eine Idealisierung, und
ob eine Masse als Massenpunkt betrachtet werden kann, hängt vom
Problem ab.
1.1.2 Beschreibung der Bewegung
Ein frei bewegliches Teilchen hat im Raum drei Freiheitsgrade. Das
heisst, das Teilchen kann sich in drei unabhängige Richtungen bewegen: oben, unten, rechts, links, vorwärts und zurück. Ein Teilchen
kann sich von einem Ort zu einem anderen Ort bewegen.
Ein Teilchen ist in Bewegung, wenn sich seine Lage mit der Zeit
verändert.
Mit einer stroboskopischen Lampe, können wir die Position des
Teilchens zu verschiedenen Zeiten sehen.
Das Zeitintervall zwischen zwei Blitzen der stroboskopischen
Lampe wird ∆t genannt.
17
Mit der stroboskopischen Methode können wir eine Liste von
Ortslagen zu verschieden Zeiten schaffen. Diese Liste wird die Bewegung beschreiben.
Physik
18
Kinematik
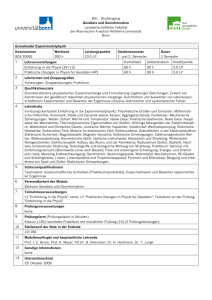
FIGURE 1. Stroboskopisches Bild der Bewegung eines Balls. In diesem Bild
ist das Zeitintervall ∆t zwischen den Blitzen lang, so dass es schwierig ist,
die Bewegung zu verstehen.
FIGURE 2. gleich wir in Figur 1, aber mit kleinem ∆t, und es ist leichter, die
Bewegung zu verstehen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in einer Dimension
Wie man in der Abb. 1 sehen kann, wird die Bewegung mit
schlechter Genauigkeit beschrieben, wenn das Zeitintervall ∆t zwischen den Blitzen der Lampe gross ist.
Wenn das Zeitintervall kleiner gemacht wird, ist die Bewegung besser
beschrieben, wie in Abb. 2 dargestellt ist.
Wenn das Zeitinterall ∆t gegen null geht, wird man eine kontinuierliche (funktionale) Beziehung zwischen der Lage und der Zeit gewinnen.
19
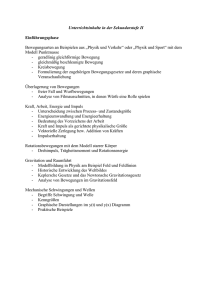
Die Verbesserung der Beschreibung mit kleiner werdenden Zeitintervallen ist in Abb. 3 dargestellt.
Physik
20
Kinematik
(a)
(c)
(e)
s1
s1
s2
(b)
(d)
(f)
s1
s1
s1
FIGURE 3. Die Bewegung wird besser charakterisiert, je kleiner das
Zeitintervall ∆t ist. a) ∆t=1/15 s, b) ∆t=10/15 s, c) ∆t=6/15 s, d) ∆t=3/15 s, e)
∆t=2/15 s, f) ∆t=1/15 s.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in einer Dimension
1.1.3 Bewegung in einer Dimension
Am Anfang beschränken wir uns auf die Bewegung in einer Dimension. Dass heisst, dass die Bewegung des Körpers geradlinig ist, seine
Bahn ist eine gerade Linie.
ein Auto, das auf einer ebenen, geraden und schmalen Strasse fährt
ein Flugzeug
ein Zug
Einfache Beispiele:
1.
2.
3.
Bei der Bewegung entlang einer geraden Linien gibt es nur zwei
mögliche Richtungen: die positive und die negative. Siehe Abb. 4.
Man führt auf dieser Geraden zunächst ein Koordinatensystem ein,
in dem man einen Ursprung O und eine positive Richtung wählt. Die
übliche Konvention mit positiven x-Werten nach der rechten Seite des
Urspunges wird verwendet.
–15
–10
0
5
10
x2
Verschiebung ∆x
x1
–5
15
20
x (m)
Positive Richtung
21
Jedem Punkt auf der Geraden entspricht eine Zahl x, die den Abstand
des Punktes vom Ursprung angibt.
–20
Ursprung
Bewegung in einer Dimension. Definition der Verschiebung.
Negative Richtung
FIGURE 4.
Physik
22
Kinematik
x = f (t)
20
∆t
ss
zu Fu
15
25
30
35
∆X
40
45
50
Zeit (m)
(EQ 1)
Wenn das Teilchen sich bewegt, wird sich seine Lage mit der Zeit
verändern. Dann kann der Ort x des Teilchens mit der Zeit durch eine
funktionale Beziehung in Zusammenhang gebracht werden:
10
Ein Beispiel einer solchen Beziehung ist in Abb. 5 dargestellt.
8
7
6
5
4
3
2
1
0
5
uto
Beispiel mit einem Wagen, der kein Benzin mehr hat.
0
mit A
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
FIGURE 5.
Ort (km)
Bewegung in einer Dimension
1.1.4 Der Begriff der Geschwindigkeit
Der Begriff der Geschwindigkeit ist uns aus dem Alltag vertraut. Wir
können ihn von einer Analyse der stroboskopischen Bilder verstehen.
Die stroboskopischen Bilder stellen nicht nur die Bewegung dar,
sondern, weil das Zeitintervall zwischen den Blitzen der Lampe konstant ist, auch die Geschwindigkeit, mit der das Teilchen sich bewegt.
Siehe Abb. 6 und 7.
∆x
∆t
Wir definieren die mittlere Geschwindigkeit (oder Durchschnittsgeschwindigkeit) als
vm =
wobei ∆x die Verschiebung des Teilchens darstellt und ∆t die verstrichene Zeit. Siehe Abb. 8.
Die MKS-Einheit der Geschwindigkeit ist Meter pro Sekunde (m/s).
x2 − x1
t2 − t1
Wenn wir annehmen, dass sich der Gegenstand zum Zeitpunkt t1 bei
der Position x1 und zum späteren Zeitpunkt t2 bei x2 befindet, so ist
die Durchschnittsgeschwindigkeit:
vm =
23
Die Verschiebung kann sowohl positive als auch negative Werte annehmen. Die mittlere Gewschindigkeit kann auch positive oder negative
Werte annehmen, je nachdem, ob x2 grösser oder kleiner als x1 ist.
Ein positiver Wert entspricht einer Bewegung nach rechts, ein negativer Wert einer Bewegung nach links.
Physik
24
t6
Kinematik
t5
∆t
t4
∆t
t3
∆t
t2
∆t
t1
∆t
Zeit:
x6
10
x5
5
x4
0
x3
–5
x2
–10
x1
–15
Ort:
–20
∆t
5
15
20
x (m)
t5
t6
∆t
t4
x6
20
x (m)
x5
15
x4
10
∆t
Bewegung eines Wagens mit konstanter Geschwindigkeit.
t3
FIGURE 6.
t2
∆t
t1
∆t
Zeit:
x2
0
x1
–5
Ort:
–10
Bewegung eines Wagens mit sich verändernder Geschwindigkeit.
–15
x3
–20
FIGURE 7.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
∆t
∆t
v2=
∆t
∆t
x3–x2
v3=
∆t
∆t
x4–x3
0
x3
5
v4=
x4
∆t
∆t
x5–x4
10
Definition der mittleren Geschwindigkeit
–10 –5
x1 x2
x2–x1
–15
v1=
Bewegung in einer Dimension
–20
FIGURE 8.
20 x (m)
x6
∆t
x6–x5
∆t
v5=
15
x5
Wir betrachten nun noch einmal das Beispiel des Wagens (siehe Abb.
5): der Wagen fährt von x1=0 bis zur Lage x2=5km, wo er kein Benzin mehr hat. Die Fahrt hat 8 Minuten lang gedauert. Nachdem spaziert der Fahrer zu Fuss weiter, 27 Minuten lang, bis er eine
Tankstelle erreicht, die sich am Ort x3=6km befindet.
x1 = 0 km
x 2 = 5 km
x 3 = 6 km
Wir berechnen die folgenden mittleren Geschwindigkeiten mit
t1 = 0 Minuten;
t2 = 8 Minuten;
t3 = 35 Minuten;
25
∆x x2 − x1 5 − 0 km
=
=
= 0, 625km / Min = 37, 5km / Stunde
∆t
t2 − t1 8 − 0 Min
Wagen:
vm =
Physik
26
Kinematik
6 − 5 km
∆x x − x2
= 3
=
= 0, 037km / Min = 2, 22 km / Stunde
35 − 8 Min
∆t
t3 − t2
Fahrer:
vm =
Gesamte Strecke
6 − 0 km
∆x x − x1
vm =
= 3
=
= 0,171km / Min = 10, 3km / Stunde
∆t
t3 − t1 35 − 0 Min
1.1.5 Momentane Geschwindigkeit
In Abb. 5 ist die Bewegung eines Wagens entlang der x-Achse gegen t
aufgetragen. Eine solche Kurve nennen wir eine “Weg-Zeit” oder x-tKurve.
Die Verschiebung ∆x und das Zeitintervall ∆t zwischen dem ersten
und letzten Punkt sind in der Abbildung eingetragen.
Die Strecke zwischen diesen Punkten ist die Hypotenuse des
rechtwinkligen Dreiecks mit den Katheten ∆x und ∆t. Das Verthältnis
∆x/∆t ist demnach die Steigung dieser Strecke.
Dieses Verhältnis entspricht aber genau der mittleren Geschwindigkeit im Zeitintervall ∆t und wir haben eine geometrische Bedeutung
der Geschwindigkeit gewonnen.
Die mittlere Geschwindigkeit entspricht der Steigung der
Geraden, die die Punkte (x1,t1) und (xi,ti) (i=2,3,4,...) verbindet.
Bewegung in einer Dimension
0
1
x1,t1
2
3
5
x3,t3
6
Tangente
∆t
x2,t2
x-t-Kurve
4
7
∆x
x4,t4
8
t
9
Sprache der Mathematik bedeudet das, dass wir den Grenzwert des
Quotienten berechnen.
140
120
100
80
60
40
20
0
∆t → 0
∆x
∆t
FIGURE 9. Mittlere Geschwindigkeit und Momentangeschwindigkeit als die
Steigung der Tangente an die x-t-Kurve.
Das wird in der Form
∆t → 0
geschrieben. Dieser Grenzwert ist aber gleich der Ableitung von x
nach der Zeit, d. h.,
v = lim v m = lim
Um die momentane Geschwindigkeit in einem Punkt zu bestimmen,
müssen wir das Zeitintervall ∆t so klein wie möglich machen. In der
Physik
27
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Siehe Abb. 9.
x
28
Kinematik
v ( t) =
dx
= x«( t)
dt
In der eindimensionalen Bewegung kann das Teilchen sich nur nach
rechts oder links bewegen. Das Vorzeichen der Geschwindigkeit wird
dann positiv oder negativ sein.
Bemerkung: Die physikalische Bedeutung der Geschwindigkeit, die
als ein Grenzwert definiert ist, wird heute im Bereich der Physik nicht
mehr als ein grundsätzliches Konzept der Mechanik betrachtet. Wir
werden später sehen, dass ein solcher Grenzwert im Bereich der
Quantenphysik nicht mehr benutzt werden kann. Die Definition der
momentanen Geschwindigkeit soll “nur” als ein Begriff verstanden
werden, der sehr nützlich ist für die Beschreibung der Bewegung von
makroskopischen Körpern. Diese Definition soll nur benutzt werden
in Fällen, in denen der Effekt der sogenannten Unschärferelation von
Heisenberg nicht bemerkt werden kann. Diese wird im Kapitel der
Quantenphysik genauer studiert.
Beispiel 1: Ein Teilchen bewegt sich auf solche Weise entlang
der x-Achse, dass seine Position zu jedem Zeitpunkt durch
2
x ( t ) = 5t + 1 gegeben ist, wobei x in Metern und t in Sekunden
angegeben ist. Berechnen Sie seine mittlere Geschwindigkeit
im Zeitintervall zwischen (a) 2s und 3s, (b) 2s und 2,1 s (c) 2s
und 2,001 s, (d) 2s und 2,00001 s. (e) Berechnen Sie auch die
momentane Geschwindigkeit bei 2 s.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in einer Dimension
1.1.6 Der Begriff der Beschleunigung
∆v
∆t
Wenn sich die momentane Geschwindigkeit eines Teilchens mit der
Zeit verändert, dann sagen wir, das Teilchen werde beschleunigt. Die
mittlere Beschleunigung in einem bestimmten Zeitintervall ∆t ist als
das Verhältnis ∆v/∆t definiert
am =
wobei ∆v = v 2 – v 1 die Änderung der momentanen Geschwindigkeit
in dem Zeitintervall ∆t=t2–t1 ist.
In MKS-System wird die Beschleunigung als Meter pro Sekunde im
Quadrat ausgedrückt ( m ⁄ s 2 ) .
Beispiel 2: Ein Körper bewegt sich entlang der x-Achse
gemäss dem Bewegungsgesetz x ( t ) = 2t 3 + 5t 2 + 5 wobei x in
Metern und t in Sekunden gegeben sei. Bestimmen Sie (a) die
Geschwindigkeit und die Beschleunigung zu jedem beliebigen
Zeitpunkt, (b) die Position, Geschwindigkeit und Beschleunigung zu t=2s und 3s und (c) die mittlere Geschwindigkeit und
Beschleunigung zwischen t=2s und t=3s.
∆v dv
=
∆t dt
Wie bei der Geschwindigkeit definieren wir nun die momentane
Beschleunigung als Grenzwert der mittleren Beschleunigung für
immer kleiner werdende Zeitintervalle:
∆t → 0
a( t) = lim
29
Die Beschleunigung ist damit als die zeitliche Ableitung der
Geschwindigkeit definiert.
Physik
30
Kinematik
dv d dx d 2 x
= ≡
dt dt dt dt 2
Da die Geschwindigkeit selbst als Ableitung des Ortes x nach der Zeit
definiert ist, ist die Beschleunigung die zweite Ableitung von x nach
t, geschrieben als
a( t) =
Diese Beziehungen zwischen Position, Geschwindigkeit und Beschleunigung können wir in Abb. 10 sehen, wo die Bewegung eines
Liftes dargestellt ist.
In Abb. 10a) ist die x(t)-Kurve des Liftes gezeigt, wenn er sich nach
oben entlang einer x-Achse bewegt.
20
10
0
4
3
2
1
0
2
0
-2
-4
0
0
2
2
2
4
4
4
6
6
6
8
8
8
Beispeil der Bewegung eines Liftes
0
Bewegung in einer Dimension
Physik
FIGURE 10.
2
In b) die Geschwindigkeit v(t) des Liftes. Sie ist die zeitliche Ableitung der x(t)-Kurve.
In c) die Beschleunigung. Sie ist die zeitliche Ableitung der v(t)Kurve. Sie ist positiv wenn die Geschwindigkeit zunimmt, und negativ wenn die Geschwindigkeit abnimmt.
Man bemerkt, dass die Änderung der Geschwindigkeit in den Zeitintervallen ∆t1 (von t=1 bis t=3s) und ∆t2 (von t=8 bis t=9s) gleich sind,
aber mit entegengesetztem Vorzeichen. Weil ∆t2 halb so gross ist wie
∆t1, ist die Beschleunigung während ∆t2 doppelt so gross, wie
während ∆t1,
Dieser Effekt in einem Lift ist uns vertraut, weil unser Körper diese
Beschleunigungen spürt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Lage x (m)
Geschwindigkeit (m/s)
Beschleunigung (m/s )
10
Zeit t (s)
10
Zeit t (s)
10
Zeit t (s)
31
32
Kinematik
1.1.7 Integration
Wir haben gesehen, wie man die Geschwindigkeitsfunktion v(t) und
die Beschleunigungsfunktion a(t) durch Ableitung der Ortsfunktion
x(t) nach der Zeit t gewinnen kann.
Das umgekehrte Problem ist, die Funktion x(t) zu finden, wenn die
Geschwindigkeit v(t) oder die Beschleunigung a(t) gegeben ist.
Dazu müssen wir Integration anwenden.
dx
dt
⇒
dx = v(t )dt
Wenn wir wissen, wie sich die Geschwindigkeit mit der Zeit ändert,
d.h. wenn wir v=f(t) kennen, dann können wir die Position x zu
jedem Zeitpunkt durch Integration erhalten. Es folgt
v(t ) =
Um die physikalische Bedeutung dieser Gleichung zu verstehen,
muss man sehen, dass vdt die Verschiebung des Teilchens innerhalb
des kleinen Zeitintervalls dt darstellt.
(EQ 2)
Jetzt werden wir sehen, dass die Positionsfunktion x(t) die Stammfunktion von v(t) ist.
t
Durch Integration von dx=vdt erhalten wir
x
t0
∫ dx = ∫ v ( t’) dt’
x0
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in einer Dimension
t
⇒
t0
x ( t) = ∫ v ( t′ ) dt′ + x 0
t
wobei x0 der Wert von x zum Zeitpunkt t0 ist. Das heisst,
t0
x − x 0 = ∫ v ( t′ ) dt′
Wir wissen aus der Mathematik, dass der Stammfunktion eine beliebige Integrationskonstante hinzugefügt werden muss, um die allgemeine Lösung zu erhalten.
Diese Konstante ist durch die Position des Körpers zu einem bestimmten Anfangszeitpunkt gegeben, der gewöhnlich bei t=0 gewählt
wird. Diese Konstante wird deshalb die Anfangsbedingung genannt.
Da wir zweimal integrieren müssen um x(t) aus a(t) zu erhalten,
treten nun zwei Konstanten x0 und v0 auf. Diese Konstanten sind
durch die Anfangsbedingungen der Geschwindigkeit und der Position
des Teilchens gegeben.
1.1.8 Einige spezielle Bewegungsvorgänge
Wir werden nun zwei wichtige Bewegungen betrachten.
Die Bewegungsgleichungen, die wir hier ableiten werden, werden
immer wieder benötigt werden.
v(t ) = Konst. ⇒
dv
=0
dt
⇒
a( t ) = 0
33
a) Gleichförmige geradlinige Bewegung. Wenn sich ein Körper in
gleichförmiger, geradliniger Bewegung befindet, ist seine Geschwindigkeit v konstant. Daher ist
Physik
34
Kinematik
Bewegung in einer Dimension
Physik
Siehe Abb. 11.
x (t ) =
1 2
a0 t
2
t
v(t ) = a0 t
a(t ) = a0
Wenn wir x0=0, v0=0 und t0=0 setzen, finden wir
1
= x 0 + v 0 ( t − t0 ) + a0 ( t − t0 ) 2
2
t0
= x 0 + ∫ (v 0 + a0 ( t′ − t0 )) dt′
t
t0
x ( t) = x 0 + ∫ v ( t′ ) dt′
und wir erhalten
t
t
= x 0 + v 0 ( t − t0 )
t0
= x 0 + v 0 ∫ dt′
t0
x ( t) = x 0 + ∫ v ( t′ ) dt′
das heisst, es gibt keine Beschleunigung! Es folgt für konstantes v,
dass
mit x0=x(t0).
b) Gleichförmig beschleunigte geradlinige Bewegung. Die Bewegung eines Teilches mit konstanter Beschleunigung kommt in der
Natur häufig vor. So fallen zum Beispiel alle Gegenstände aufgrund
der Gravitation senkrecht nach unten.
t
= v 0 + a0 ( t − t0 )
t0
= v 0 + a0 ∫ dt′
t0
v ( t) = v 0 + ∫ a( t′ ) dt′
t
Wenn sich ein Körper in gleichförmig beschleunigter geradliniger
Bewegung befindet, ist seine Beschleunigung a(t)=a0 konstant. Es
folgt daher
mit v0=v(t0).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
35
36
Kinematik
Lage x (m)
Geschwindigkeit (m/s)
2
40
20
0
10
7.5
5
2.5
0
2
1.5
1
0.5
0
0
0
0
2
2
2
4
4
4
6
6
6
8
8
8
Bewegung mit konstanter Beschleunigung
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
FIGURE 11.
Beschleunigung (m/s )
10
Zeit t (s)
10
Zeit t (s)
10
Zeit t (s)
Bewegung in einer Dimension
1.1.9 Beschleunigung durch die Gravitation
In der Nähe der Erde spürt jeder Körper die sogenannte Erdbeschleunigung. Diese Beschleunigung wird durch eine Anziehung zwischen der Erde und dem Körper (Gravitationskraft) verursacht.
Wenn der Luftwiderstand als vernachlässigbar betrachtet werden
kann, beobachten wir, dass jeder Körper, unabhängig von seinem
Gewicht, die selbe Erdbeschleunigung fühlt. Wir nennen diese Beschleunigung die Erdbeschleunigung g.
Die Richtung dieser Beschleunigung ist nach unten zum Erdzentrum
gerichtet. Der Betrag ist
g ≈ 9, 8 m / s2
⇒
t=
2h
g
Demonstrationsexperiment: Fallversuch. Die Fallzeit eines
Gegenstandes, der aus verschiedenen Höhen fallen gelassen
wird, wird gemessen. Aus diesen Messungen bemerken wir,
dass die Fallzeit proportional zur Quadratwurzel der Höhe
ist.
1 2 1 2
a t = gt
2 0
2
Gleichförmig beschleunigte Bewegung:
h=
37
Tabelle 1 zeigt eine Liste von gerechneten Fallzeiten mit einer
Erdbeschleunigung g=9.81m/s2.
Physik
38
Kinematik
0.3
0.2
0.1
H he h (m)
0.2856
0.2474
0.2020
0.1428
Fallzeit (s)
der Fallzeite.
0.4
0.3193
TABLE 1. Tabelle
0.5
0.3498
0.3778
0.6
0.7
0.4516
0.4039
0.4736
0.8
1.0
0.4947
0.4284
1.1
0.9
1.2
Wenn wir uns von der Erde entfernen, wird die Gravitationsbeschleunigung abnehmen. Zum Beispiel, in einer Höhe von ≈2500 km, ist
die Erdbeschleunigung ungefähr halb so gross, wie auf der
Erdoberfläche, oder g≈5m/s2.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
0.6
0.5
0.4
0.3
0.2
0.1
0
Physik
0.1428
0.202
0.2
0.2474
0.3498
0.3778
0.4039
0.8
Höhe (m)
0.6
0.3193
Fallversuch
0.2856
0.4
gMond ≈ 1, 67 m / s 2
0.4284
1
0.4516
0.4736
0.4947
1.2
1.4
39
Auf anderen Planeten ist die Beschleunigung verschieden. Zum
Beispiel, auf dem Mond ist g nur ungefähr 1/6 der Erdbeschleunigung, d.h.
FIGURE 12. Plot der Beziehung zwischen den Höhen und den Fallzeiten im
Fallversuch. Eine Beschleunigung g=9.81m/s2 wurde verwendet.
0
Bewegung in einer Dimension
(s)
Fallzeit
40
Kinematik
1.2 Bewegung in zwei oder drei
Dimensionen
Jetzt betrachten wir die Bewegung eines Körpers in mehreren Dimensionen. Wir werden dieselben Begriffe, die wir für die eindimensionale Bewegung eingeführt haben, aber in komplizierterer Form wieder
verwenden: Verschiebung, Geschwindigkeit und Beschleunigung
werden nun als Grössen aufgefasst, die Vektoren sind.
Abb. 13 zeigt ein Teilchen (einen Ball), das sich entlang einer Kurve
im Raum bewegt. Die Verschiebungsvektoren S i stellen die Bewegung des Balles im Raum dar. Der Verschiebungsvektor S 1
entspricht der Bewegung zwischen dem 1. und 2. Blitz einer stro-
s1
2
s2
3
s3
4
s4
s5
s6
7
s7
s8
8
9
boskopischen Lampe, der Vektor S 2 zwischen dem 2. und 3. Blitz,
usw.
1
5
6
Verschiebungsvektoren. Dieses Bild stellt die Bewegung des
Balles im Raum dar. Der Verschiebungsvektor S 1 entspricht der Bewegung
FIGURE 13.
zwischen dem 1. und 2. Blitz einer stroboskopischen Lampe, S 2 zwischen
dem 2. und 3. Blitz, usw.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
Die Kurve repräsentiert den Weg, den das Teilchen im Raum
durchläuft, d.h. die Trajektorie oder die Bahnkurve des Teilchens.
Sie sollte nicht verwechselt werden mit den Weg-Zeit-Kurven auf den
vorherigen Seiten.
Mit Hilfe eines mehrdimensionalen Koordinatensystems, können
die Puntke auf der Bahnkurve durch Zahlen (Koordinaten) dargestellt werden. Mit den Koordinaten kann man numerische Rechnungen
durchführen, zum Beispiel mit einem Computer.
Um dieses Ziel zu erreichen, benutzen wir die Eigenschaft der
Komponenten-Zerlegung eines Vektors: Wenn wir Einheitsvektoren
benutzen, können wir einen beliebigen Vektor durch seine Komponenten ausdrücken.
Ein Einheitsvektor ist als ein dimensionsloser Vektor definiert, der
den Betrag 1.0 besitzt und in eine festgelegte Richtung zeigt.
Wir werden die Einheitsvektoren e x, e y, e z benutzen, die in x-, y-,
z-Richtung zeigen (siehe Abb. 14).
41
Jeder Vektor A kann als Linearkombination dieser Einheitsvektoren geschrieben werden :
r
r
r
r
A ≡ Ax ex + Ay ey + Azez
Physik
42
Kinematik
ez
ey
y
ex
x
O
Ayey
Azez
z
Definition kartesischer Einheitsvektoren.
Ursprung O
z
FIGURE 14.
1.2.1 Der Ortsvektor
y
A
Axex
x
Wir werden ein Bezugsystem definieren, relativ zu welchem die
Bewegung beschrieben wird. Der Ursprung ist als der Nullpunkt des
Koordinatensystems definiert.
Der Ortsvektor ist als die Verschiebung zwischen dem Ursprung und
einem Punkt definiert.
In einer zweidimensionalen Darstellung wird z.B. der Ortsvektor als
r
r
r
r ≡ xex + yey
geschrieben. Siehe Abb. 15.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
y
r
Bewegung in zwei oder drei Dimensionen
ey
ex
x
FIGURE 15. Definition eines zweidimensionalen Bezugsystems und des
Ortsvektors r(x,y).
Abb. 16 zeigt, wie die Verschiebungsvektoren S i , die früher definiert
wurden, mit Hilfe der Ortsvektoren r i dargestellt werden können.
Wie im Fall der Bewegung in einer Dimension, wird die Bewegung
umso besser beschrieben, je kleiner das Zeitintervall ∆t ist.
Deshalb betrachten wir den Grenzfall, für den ∆t nach null geht. Wir
haben gesehen, dass diese Methode zum Gebiet der Differentialrechnung gehört.
43
Die Lage des Teilchens werden wir als eine funktionale Beziehung
zwischen den Ortsvektoren und der Zeit beschreiben. Diese Beziehung entspricht der Bahnkurve des Teilchens und wird als
Physik
44
Kinematik
geschrieben.
y
r1
1
s1
r
r
r
r ( t) = x ( t)ex + y ( t)ey
r2
2
s2
x
r3
3
s3
r4
4
s4
r5
5
s5
r6
6
s6
Darstellung der Verschiebungsvektoren S i und der
ex
7
r7
s7
s8
8
9
Die anderen Grössen, die Geschwindigkeit und die Beschleunigung,
werden als erste und zweite zeitliche Ableitungen des Ortvektors
definiert.
ey
Ursprung O
FIGURE 16.
Ortsvektoren
ri .
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
1.2.2 Der Geschwindigkeitsvektor
r
r
r
r S (r − r )
v i ≡ i = i +1 i
∆t
∆t
Um einen Geschwindigkeitsvektor zu erhalten, nehmen wir einen
Verschiebungsvektor und dividieren ihn durch das Zeitintervall ∆t,
d.h.
ey
ri
Vi =
i
S i = r i +1 – r i
r i +1
–r i )
(r
Si
= i +1
t
t
Definition des Geschwindigkeitsvektors
ex
Siehe Abb. 17. Dieser Vektor zeigt in die Richtung der Bewegung
und sein Betrag ist gleich der Geschwindigkeit.
FIGURE 17.
45
In Abb. 18 sehen wir, dass der Betrag des Verschiebungsvektors nicht
gleich dem tatsächlich durchlaufenen Weg ist, der entlang der Kurve
gemessen wird. Der Betrag des Verschiebungsvektors ist kleiner als
diese Distanz. Wenn wir jedoch immer kleiner werdende Zeitinter-
Physik
46
Kinematik
valle betrachten, dann nähert sich der Betrag der Verschiebung der
tatsächlichen Strecke, die das Teilchen entlang der Kurve zurücklegt.
Die Richtung des mittleren Geschwindigkeitsvektors nähert sich
dabei der Richtung der Tangente an die Kurve.
0
S0
∆t
v0
S0
∆t
1
b)
S0
∆t
v
~i =
0 Sec
Si
∆t
momentane
Geschwindigkeit
∆t
v
~i
∆t = 0.1 Sec
v0 =
v0
0 S0 1
r
r
dr r«
v (t ) =
= r (t )
dt
S0
d)
Definition der momentanen Geschwindigkeit.
∆t = 0.025 Sec
v0 =
S0
01
∆t = 0.4 Sec
v0 =
v0
Wir haben gesehen, dass die Berechnung der mittleren Geschwindigkeit wenn ∆t nach null geht, zu einer zeitlichen Ableitung führt. Die
momentane Geschwindigkeit ist nun ein Vektor, der tangential zur
Bahn ist, und der durch die zeitliche Ableitung des Ortsvektors gegeben ist:
a)
c)
FIGURE 18.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
=
Um die Ableitung zu bestimmen, müssen wir den Ortsvektor in seine
Komponenten zerlegen:
r
r
dr
v ( t) =
dt
r
∆r
= lim
∆t → 0 ∆t
r
r
∆xex + ∆yey
= lim
∆t → 0
∆t
∆x r ∆y r
e
= lim ex +
∆t → 0 ∆t
∆t y
dx r dy r
e + e
dt x dt y
oder
r
r
r
r dy r
dx
e + e
v ( t) = v x ( t)ex + v y ( t)ey =
dt x dt y
1.2.3 Der Beschleunigungsvektor
Der Vektor der mittleren Beschleunigung ist definiert als das Verhältnis der Änderung der Geschwindigkeit zum Zeitintervall ∆t
r
r
r (v − v )
ai ≡ i +1 i
∆t
47
Man muss beachten, dass der Geschwindigkeitsvektor seinen Betrag,
seine Richtung oder beides ändern kann. Von Beschleunigung spricht
man, wenn der Geschwindigkeitsvektor in irgendeiner Weise variiert.
Physik
48
Kinematik
heisst, der momentane Beschleunigungsvektor ist die zeitliche Ableitung des Geschwindigkeitsvektors.
Bewegung in zwei oder drei Dimensionen
V2
V3
V3
V2
V4
V3
V4
V5
V5
V6
V7
mit v 0 = v ( 0 ) .
r
r
v ( t) = v 0
t
0
r
+ ∫ a( t′ ) dt′
0
t
r r
= v 0 + a0 ∫ dt′
r r
= v 0 + a0 t
49
Für eine Bewegung mit gleichförmiger Beschleunigung, finden wir
die folgende vektorielle Gleichung:
Wir wollen jetzt die Bewegungsgleichung von zweidimensionalen
Bewegungen integrieren.
1.2.4 Zerlegung der Bewegung – Komponenten
=
Um die zeitliche Ableitung zu bestimmen, müssen wir den
Geschwindigkeitsvektor in seine Komponenten zerlegen:
r
r
dv
a ( t) =
dt
r
r
dv r dv y r
e = v«x ( t)ex + v«y ( t)ey
= xe +
dt x dt y
r
r
d2x r d2y r
e = x««( t)ex + y««( t)ey
e +
dt 2 x dt 2 y
Andererseits, wenn der Geschwindigkeitsvektor denselben Betrag
und dieselbe Richtung hat, nennen wir dies eine Bewegung mit konstanter Geschwindigkeit. Siehe Abb. 19a).
V1
V1
V1
V2
Abb. 19b) und c) zeigen solche Arten von Beschleunigung. In b)
ändert sich nur der Betrag der Geschwindigkeit, und in c) nur die
Richtung.
a)
b)
c)
V4
Der momentane Beschleunigungsvektor ist der Grenzwert der mittleren Beschleunigung, wenn das Zeitintervall gegen null geht. Das
Physik
FIGURE 19. a) Bewegung mit konstanter Geschwindigkeit. b) und c) sind
beschleunigte Bewegungen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
50
Kinematik
(
)
Nun fügen wir die Einheitsvektoren ein:
r
r
r
r
r
v ( t) = v 0 x ex + v 0 y ey + a0 x ex + a0 y ey t
r
r
= (v 0 x + a0 x t)ex + (v 0 y + a0 y t)ey
= r(0) .
t
Diese Bewegungsgleichung wird geschrieben, als:
r r
1r
= r0 + v 0 t + a0 t 2
2
0
r
r
r
r ( t) = r0 + ∫ v ( t′ ) dt′
Mit einer ähnlichen Herleitung findet man für den Ortsvektor:
wobei
r0
0
t
r
r
r
r ( t) = r0 + ∫ v ( t′ ) dt′
r r
1r
= r0 + v 0 t + a0 t 2
2
r
r
1
1
= ( x 0 + v 0 x t + a0 x t 2 )ex + ( y 0 + v 0 y t + a0 y t 2 )ey
2
2
Solche Bewegungsgleichungen sagen uns, dass die horizontalen
und vertikalen Komponenten der Bewegung unabhängig voneinander sind.
Für eine mehrdimensionale Bewegung werden wir ein ähnliches
Resultat finden: die Bewegung kann in unabhängige Komponenten
zerlegt werden. Man muss beachten, dass diese Zerlegung nicht ganz
trivial ist. Sie muss mit Versuchen geprüft werden.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
1.2.5 Demonstrationsexperiment: Wurf im bewegten
System
Eine wichtige Anwendung der Bewegung in zwei Dimensionen ist
die eines Teilchens, das in die Luft geworfen oder geschossen wird
und sich dann frei bewegen kann.
In diesem Versuch wird geprüft, ob die horizontalen und vertikalen
Komponenten der Bewegung unabhängig voneinander sind.
Wurf im bewegten System.
Ein Ball (das Teilchen) wird von einem Wagen aus senkrecht in die
Luft geworfen. Siehe Abb. 20.
FIGURE 20.
51
Um diese Beweung zu bestimmen, betrachten wir eine zweidimensionale Bewegungsgleichung.
Physik
52
Kinematik
Das Teilchen erfährt während des Fluges eine konstante nach unten
gerichtete Beschleunigung (Erdbeschleunigung)
r
r
r
a( t) = a0 = − gey ( g > 0)
Der Anfangsgeschwindigkeitsvektor ist definiert als:
r r
r
r
v 0 = v ( t = 0) = v 0 x ex + v 0 y ey
Wir zerlegen die Bewegung in die zwei unabhängigen Komponenten:
x-Achse (// e x ):
ax ( t) = a0 x = 0
v x ( t) = v 0 x + a0 x t = v 0 x
1
2
x ( t) = x 0 + v 0 x t + a0 x t = x 0 + v 0 x t
2
⇒ Das Teilchen bewegt sich gleichförmig in x-Richtung
Y-Achse (// e y ):
ay ( t) = − g
v y ( t) = v 0 y + a0 y t = v 0 x − gt
1
1 2
2
y ( t) = y 0 + v 0 y t + a0 y t = y 0 + v 0 y t − gt
2
2
⇒ Das Teilchen bewegt sich in gleichförmig beschleunigter Bewegung in y-Richtung.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
Das Teilchen wird vom Wagen aus senkrecht in die Luft geworfen.
Wenn der Wagen in Ruhe ist, bewegt sich der Ball senkrecht nach
oben und fällt dann zu seiner ursprünglichen Position zurück.
Wenn der Wagen selbst sich horizontal mit konstanter Geschwindigkeit bewegt, bewegt sich der Ball zum höchsten Punkt seiner Flugbahn, um dann wieder zurückzukehren. Der Ball wird vom Wagen
wieder aufgefangen.
Die maximale Höhe der Flugbahn hängt von der senkrechten
Geschwindigkeit ab, die dem Ball beim Abwurf mitgegeben wird.
Die vertikale Bewegung hat nichts zu tun mit der horizontalen.
Im höchsten Punkt der Bahnkurve ist die vertikale Geschwindigkeit
gleich null: v y = 0 .
⇒
v 0 y = gtmax ⇒ tmax =
v0y
g
Wir nehmen an, dass die Kugel zur Zeit tmax diesen Punkt erreicht.
Wir müssen nur die vertikale Komponente der Bewegungsgleichung
betrachten:
v y = v 0 y − gtmax ≡ 0
2
v
v
1
1 v0y
0
y
0
y
− g = y 0 +
2 g
g 2 g
2
Wenn wir diesen Wert in den Ausdruck für y einsetzen, erhalten wir
y max = y 0 + v 0 y
53
Wir bemerken, dass diese Gleichungen unabhängig von der horizontalen Anfangsgeschwindigkeit v 0x sind.
Physik
54
Kinematik
1.2.6 Demonstrationsexperiment: Schuss auf fallende
Platte
Ein zweites Beispiel für die Zerlegung der Bewegung ist der Schuss
auf eine fallende Platte.
Man zielt mit der Kanone auf die Platte, die mit einem Elektromagneten gehalten wird. Wenn man schiesst, wird der Stromkreis im Elektromagneten unterbrochen, und die Platte fällt nach unten.
Gäbe es keine Gravitation, würde die Platte nicht fallen (!), und das
Geschoss der Kanone würde entlang einer geraden Linie fliegen.
Die Bewegungsgleichung des Geschosses würde in diesem Fall sein:
x ( t) = v 0 x t
y ( t) = v 0 y t
Um die Platte zu treffen, muss man den Winkel des Geschosses
abstimmen, so dass,
x (TTreffen ) = v 0 x TTreffen = D
y (TTreffen ) = v 0 y TTreffen = h
wobei D der horizontale Abstand zwischen der Kanone und der
Plattte ist, h die Höhe der Platte, und TTreffen die Zeit des Treffens.
Dann muss gelten,
v0y h
=
v0x D
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegung in zwei oder drei Dimensionen
v0y h
=
v0x D
Das heisst, dass das Geschoss unter einem Winkel
tan θ =
abgeschossen werden muss.
Mit der Erdbeschleunigung, wird die Bewegungsgleichung des
Geschosses so sein:
x ( t) = v 0 x t
1
y ( t) = v 0 y t − gt 2
2
Die Bewegungsgleichung der Platte ist nun
x ( t) = D
y ( t) = h − 1 gt 2
2
⇒
v0x D
=
v0y h
=D
v T
0 x Treffen
1
1 2
− gT 2 = h − gTTreffen
v T
0 y Treffen 2 Treffen
2
so dass die Bedingung für das Treffen des Geschosses und der Platte
folgendermassen gegeben ist
oder
v 0 x TTreffen = D
v 0 y TTreffen = h
55
Aber dies wird immer der Fall sein, weil wir den Winkel der Kannone
so bestimmt haben, dass diese Bedingung erfüllt ist!
Physik
56
Unabhängig von der Geschwindigkeit des Geschosses werden die
Platte und das Geschoss aufeinandertreffen.
Kinematik
Kreisbewegungen kennen wir aus der Natur und aus dem täglichen
Leben. Zum Beispiel:
1.3 Gleichförmige Kreisbewegung
Gleichf rmige Kreisbewegung
1.
2.
3.
Die Bewegung der Erde um die Sonne oder die des Mondes um die
Erde sind ungefähr Kreisbahnen.
Autos bewegen sich auf Kreisbögen, wenn sie um Kurven fahren.
Räder drehen sich im Kreis.
Wäre die Anfangsgeschwindigkeit des Geschosses höher, würde es
die Platte an einem höheren Punkt treffen.
Die physikalischen Gründe für das Treffen der Platte und des
Geschosses sind
– beide spüren dieselbe Erdbeschleunigung g, so dass beide Bewegungsgleichungen den Teil
Wir betrachten nun ein bestimmtes Beispiel: die Bewegung eines
Balles, der an einen Faden gebunden ist und sich so bewegt, dass der
Faden gespannt ist.
Die Bahnkurve des Balles wird damit auf einen Kreis gezwungen.
1
− gt 2
2
enthalten,
Siehe Abb. 21a).
und seinen Betrag als
Wie muss die Beschleunigung des Balles sein?
Physik
57
Wir bemerken, dass die Richtung dieses Vektors sich mit der Zeit
ändert. Das heisst, das Teilchen muss beschleunigt werden, um auf
der Kreisbahn zu bleiben.
r
v = v = v 02x + v 02y
Der momentane Geschwindigkeitsvektor ist in der Abbildung dargestellt. Er ist zur Bahnkurve tangential. Wir schreiben diesen Vektor als
r
r
r
v = v 0 x ex + v 0 y ey
– die vertikale Bewegung ist unabhängig von der horizontalen, die für
Platte und Geschoss ja verschieden sind.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
58
Kinematik
r
n
de
Fa
Ball
V
S1
S2
S3
S4
FIGURE 21. Gleichförmige Kreisbewegung eines Balles. a) Links: der Faden.
b) Rechts: Die stroboskopische Analyse der Bewegung mit
Verschiebungsvektoren.
Wir betrachten eine gleichförmige Kreisbewegung, d.h. den Fall, in
dem der Betrag des Geschwindigkeitsvektors konstant ist:
r
v = v = Konst.
Eine stroboskopische Analyse einer solchen Bewegung zeigt die Verschiebungsvektoren. Siehe Abb. 21b). Wie früher definieren wir ∆t
als das Zeitintervall zwischen zwei Blitzen der stroboskopischen
Lampe.
Weil v=Konst., sind die Beträge aller Verschiebungsvektoren in der
stroboskopischen Analyse gleich.
(
) (
)
Mit den Verschiebungsvektoren erhalten wir die mittleren Beschleunigungsvektoren als
r
r
r r
S / ∆t − S1 / ∆t
r
v −v
2
a2 = 2 1 =
∆t
∆t
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gleichf rmige Kreisbewegung
r
r
S
v2 = 2
∆t
r r
r
S −S
a2 = 2 2 1
∆t
r
r S
v1 = 1 ;
∆t
wobei wir die Definition der mittleren Geschwindigkeit benutzt
haben:
Das heisst,
S1
S2
– S1
( S 2 – S 1)
S3
S4
Bestimmung der Beschleunigung einer Kreisbewegung.
59
Zuerst bemerken wir, dass der Vektor S 2 – S 1 zum Zentrum der
Kreisbahn zeigt. Siehe Abb. 22. Deshalb ist die Beschleunigung auch
zum Zentrum gerichtet.
FIGURE 22.
Physik
60
Kinematik
Das heisst, dass der Ball nach dem Zentrum des Kreises beschleunigt
wird.
In jedem Punkt des Kreises, muss der Beschleunigungsvektor senkrecht zum Geschwindigkeitsvektor sein und zum Zentrum des Kreises
zeigen.
Um den Betrag der Beschleunigung zu bestimmen, konstruieren wir
zwei Dreiecke. Siehe Abb. 23. Zwei Ecken der Dreiecke haben
denselben Winkel θ.
Es gilt,
r r
v∆t S2 − S1
θ≈
=
r
v∆t
wobei r der Radius des Kreises ist.
Wir multiplizieren die Gleichung mit v und dividieren beide Seiten
durch ∆t. Wir erhalten,
r r
r
v 2 S2 − S1
=
= a1
r
v∆t 2
Dieselbe Herleitung gilt für jeden Punkt der Kreisbahn.
die Beschleunigung zeigt zum Zentrum des Kreises und
der Betrag ist konstant mit der Zeit und gleich
Wir haben für eine gleichförmige Kreisbewegung gefunden
1.
2.
r
v2
a (t ) =
r
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
2
( S 2 – S 1)
S1
Gleichf rmige Kreisbewegung
1
r
θ
(a)
S2
θ
–S1
3
S2 – S1
(c)
t
r
V∆t
θ
V∆t
S1 =
θ
S2 =
V∆
r
S1 =
(b)
FIGURE 23. Herleitung der Formel für den Betrag der Beschleunigung in
einer gleichförmigen Kreisbewegung.
T=
2πr
v
61
Während eines Umlaufs legt das Teilchen einen Weg 2πr zurück. Die
Periode T wird definiert als die benötigte Zeit, um diesen Weg
zurückzulegen. Für v=Konst., gilt
Physik
62
Kinematik
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 2
Masse, Impulserhaltung
und die Mechanik
Wenn die Beschleunigung eines Teilchens bekannt ist, haben wir
gelernt, wie wir seine momentane Geschwindigkeit und seine Lage
als Funktion der Zeit mit Differentialrechnung oder mit numerischer
Rechnung bestimmen können. Bislang haben wir gefragt, wie wird
sich ein Teilchen bewegen.
Aber in vielen realistichen Fällen, kennen wir die Beschleunigung
des Teilchens nicht.
Wir kennen die Kräfte, die auf das Teilchen wirken, oder die Energie
des Teilchens, und wir wollen diese Arten von Information benutzen,
um die Bewegung vorherzusagen. Wir wollen wissen, weshalb ein
Teilchen sich bewegt. In diesem Kapitel werden wir von Kräften
sprechen.
63
Diese Methoden bilden das Gebiet der Dynamik. Eine zentrale Rolle
in der Dynamik spielt die Masse.
Physik
64
Masse, Impulserhaltung und die Mechanik
Wir werden dazu physikalische Grössen einführen, die für die gesamte Physik von fundamentaler Bedeutung sind: der lineare Impuls
und die Kraft.
Auf den Begriffen Masse, Impuls und Kraft basiert die gesamte klassische Mechanik.
2.1 Masse
2.1.1 Die Definition der Masse
In unserer Alltagssprache benutzen wir austauchbar die Wörter
“Masse” und “Gewicht”. Im Rahmen der Physik werden diese
Wörter mit verschiedener Bedeutung benutzt.
Man kann sagen, dass
1.
2.
das Gewicht eine Kraft ist, die ein Gegenstand auf den Boden
ausübt. Das Gewicht ist eine Grösse, die mit einer Waage gemessen wird.
die Masse eine Eigenschaft des Gegenstandes ist. Die Masse ist
ein Mass dafür, wieviel “Stoff” im Gegenstand enthalten ist.
Das Gewicht eines Körpers kann in verschiedenen Fällen verschieden
sein. Das Gewicht eines Astronauts sei z.B. auf der Erdoberfläche
“90 kg”.
Wenn er in seiner Umlaufbahn um die Erde ist, ist sein Gewicht gleich null.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Masse
Im Gegensatz dazu ist die Masse des Astronauts auf der Erde und in
der Umlaufbahn immer dieselbe. Der Astonaut ist nicht masselos
geworden, sondern nur gewichtslos.
Rückstossversuch. Um die Masse genau zu definieren, werden wir
einen Rückstossversuch verwenden.
Wir betrachten zwei Wagen, A und B, die sich reibungsfrei über eine
Luftkissenbahn bewegen können. Siehe Abb. 1.
Am Anfang werden die beide Wagen mit einem Faden zusammen
gebunden. Eine Feder ist zwischen den beiden Wagen eingeklemmt.
In diesem Versuch wird der Faden zerschnitten und die Geschwindigkeiten der Wagen vA und vB gemessen.
A
Faden
A
Feder
(a)
B
reibungsfreie Luftkissenbahn
B
VB
65
Wenn der Faden zerschnitten ist, entfernen sich beide Wagen voneinander mit engegengesetzen Geschwindigkeiten. Wir bemerken, dass
die Geschwindigkeiten der Wagen nicht immer denselben Betrag
besitzen.
VA
(b)
FIGURE 1. Ein Rückstosssversuch. a) Anfangszustand b) Faden
zerschnitten.
Physik
66
Masse, Impulserhaltung und die Mechanik
Aus Experimenten mit verschiedenen Wagen schliessen wir, dass das
Verhältnis der Geschwindigkeiten der beiden Wagen gegeben ist
durch
m A vB
=
mB v A
wobei mA und mB die “Massen” der Wagen sind.
Wir bemerken, dass das Ergebnis unabhängig von der Feder ist. Wäre
die Feder stärker, würden beide Wagen sich schneller voneinander
entfernen. Das Verhältnis der Geschwindigkeiten würde sich aber
nicht ändern. Das heisst, dass die Geschwindigkeit eines Wagens nur
von den Eigenschaften der Wagen abhängt.
Bis jetzt haben wir nur von einem Verhältnis gesprochen.
Wie sollen wir die Masse definieren?
vB
mB
vA
Wir wählen eine der Massen, z.B. mB, so, dass sie eine genormte
Masse besitzt. Dann werden alle Massen relativ zur Masse mB
gemessen, als
mA =
Von der genormten Masse haben wir schon im Vorwort (Kapitel 0)
gesprochen, als die Definition der Masse betrachtet wurde. Wir haben
gesagt:
Das Kilogramm ist die Masse eines internationalen Prototyps
des Kilogramms. Es ist ein Platin-Iridium-Zylinder, der im
Bureau International des Poids et Mesures in Sèvres bei Paris
aufbewahrt wird.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Masse
Alle anderen Massen werden dann durch einen Rückstossversuch als
v BIPM − Prototyp
mA = (1 Kilogramm) ×
vA
definiert, wobei vBIPM-Prototyp die gemessene Geschwindigkeit des
internationalen Prototyps ist.
2.1.2 Träge und schwere Masse
Die vorher gegebene Definition der Masse entspricht einer genauen,
aber komplizierten Art von Messung der Masse!
Stab
Drehpunkt
67
genormte
Masse
Eine Messung mit einer Waage ist eine einfachere Methode, um die
Masse zu messen. Siehe Abb. 2.
Gegenstand
FIGURE 2. Waage. Wenn die zwei Massen gleich sind, wird der Stab
stillstehen. Der Stab ist im Gleichtgewicht.
Physik
68
Masse, Impulserhaltung und die Mechanik
Die Waage vergleicht die nach unten gerichteten Gravitationskräfte,
die die zwei Massen auf den Teller ausüben. Wenn die Gravitationskräfte einander gleich sind, bleibt der Stab im Gleichgewicht.
Mit einer solchen Waage können wir die Gravitationskräfte von Massen mit der Gravitationskraft, die die genormte Masse auf den Teller
ausübt, vergleichen.
Wenn wir die Messungen mit einer Waage mit denjenigen des Rückstossversuches vergleichen, bemerken wir, dass
gleiche Massen die gleichen Gravitationskräfte ausüben.
Wir nehmen zwei Wagen, die sich mit derselben Geschwindigkeit im
Rückstossversuch bewegen. Das heisst, dass sie die gleiche Masse
besitzen. Wenn wir diese Wagen auf den Teller der Waage stellen,
wird der Stab im Gleichgewicht stehen.
Dieses experimentelle Ergebnis ist keine offensichtliche Sache!
Der Physiker Etvös hat 1922 mit sehr genauen Versuchen bewiesen,
dass Gegenstände mit gleicher Masse gleiche Gravitationskräfte
ausüben. Er hat dieses Ergebnis mit einer Genauigkeit von 1 Teil in
109 geprüft.
die träge Masse ist die Grösse, die wir mit einem
Rückstossexperiment messen, und
die schwere Masse ist die Grösse, die wir mit einer Waage messen.
Wir sagen gewöhnlich
1.
2.
Dank R.H. Dicke, der das Etvösche Experiment noch verbessert hat,
wissen wir heutzutage, dass beide Definitionen mit einer Genauigkeit
von1 Teil in 1011 gleich sind.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Impuls
Im Bereich der Mechanik wird nichts gesagt, warum diese zwei Massen einander gleich sind. Nur in der Allgemeinen Relativitätstheorie
von Einstein kann man mit Hilfe des Äquivalenzprinzips verstehen,
warum beide gleich sein müssen.
2.2 Der Impuls
Nun werden wir das Gesetz der Impulserhaltung einführen.
Ein “Erhaltungs”-Gesetz im Gebiet der Physik drückt aus, dass eine
Grösse sich nicht ändert. Sie wird erhalten, d.h. sie wird vor und nach
verschiedenen Vorgängen dieselbe sein.
2.2.1 Die Definition des Impulses
m A vB
=
mB v A
In der Definition der Masse haben wir gesehen, dass in Rückstossversuchen das Verhältnis der Geschwindigkeiten der Wagen eine
konstante Zahl war, unabhängig von der Feder.
Wir haben dieses Ergebnis als
ausgedrückt.
69
Jetzt wollen wir diese Gleichungen verwenden, um eine Grösse zu
definieren, die sich nicht ändern wird, wenn der Faden zwischen den
Wagen zerschnitten wird.
Physik
70
Masse, Impulserhaltung und die Mechanik
Wir schreiben die Gleichung als
m A v A = mB vB
Jetzt bemerken wir, dass vA und vB die Beträge der Geschwindigkeitsvektoren der Wagen sind. Da die Wagen sich in entgegengesetzen
Richtungen voneinander entfernen, gilt
r
r
m A v A = − mB vB
wobei wir die Geschwindigkeitsvektoren statt der Beträge der
Geschwindigkeiten benutzt haben.
Diese Gleichung wird geschrieben als
r
r
mA v A + mB v B = 0
(nachdem der Faden zerschnitten ist)
Mit einem solchen Ausdruck haben wir die folgende Grösse den
Wagen A und B zugeteilt: m A v A ist nur eine Eigenschaft des
Wagens A, und m B v B nur eine Eigenschaft des Wagens B.
Eine neue Grösse wird deshalb definiert:
Der lineare Impuls eines Teilchens ist gleich dem Produkt aus seiner
Masse m und seiner Geschwindigkeit v :
r
r
p = mv
Der Impuls ist eine vektorielle Grösse, weil er als das Produkt einer
skalaren Grösse (die Masse) und einer vektoriellen Grösse (die
Geschwindigkeit) ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Impuls
Die Gleichung drückt aus, dass die Summe des Impulses nach dem
Rückstoss gleich null ist.
r
vB = 0
Bevor der Faden zerschnitten wurde, sind beide Wagen in Ruhe. Vor
dem Rückstoss, gilt
r
vA = 0
Die Summe des linearen Impulses bevor der Faden zerschnitten
wurde, ist dann
r
r
(bevor der Faden zerschnitten ist)
mA v A + mB v B = 0
Wir schliessen daraus, dass die Summe des linearen Impulses der
Wagen sich wegen des Rückstosses nicht geändert hat.
r
r
r
r
r
Ptot = pA + pB = mA v A + mBvB
71
Die Summe des linearen Impulses der Wagen nennen wir den Gesa-
mtimpuls P tot
Die Gleichung
r
r
Ptot (vorher ) = Ptot (nachher )
drückt die Erhaltung des Gesamtimpulses aus.
Physik
72
senbahn ausgeglichen. Die resultierende vertikale Kraft war deshalb
gleich null.
Die Impulserhaltung
2.3 Die Impulserhaltung
Masse, Impulserhaltung und die Mechanik
2.3.1 Das allgemeine Gesetz
Physik
vA
73
Der Mann und der Junge werden als ein System betrachtet. Die Gravitationskraft, die beide erfahren, wird ausgeglichen durch die Kraft,
FIGURE 3. Rückstoss der Eiskunstläufer. Das Gesamtimpuls wird erhalten.
Da die Masse des Mannes doppelt so gross ist wie die des Jungen, beträgt
seine Geschwindigkeit nur die Hälfte derjenigen des Jungen.
vB
Beispiel 1. Ein Mann mit einer Masse von 70kg und ein Junge mit
einer Masse von 35kg stehen zusammen auf einer glatten Eisfläche,
für die die Reibung vernachlässigbar sei. Wie weit sind die beiden
nach 5 Sekunden voneinander entfernt, wenn sie sich voneinander
abstossen und der Mann sich mit 0,3m/s relativ zum Eis bewegt?
Siehe Abb. 3.
Wenn der Faden zerschnitten wurde, hat die Feder eine nicht verschwindene Kraft ausgeübt. Diese Kraft ist aber keine äussere Kraft,
sondern eine innere Kraft, die auf die Wagen wirkt. Sie kann deshalb
den Gesamtimpuls des Systems nicht ändern.
Auf den vorherigen Seiten haben wir einen Rückstossversuch betrachtet. Wir haben gefunden, dass in einem solchen Versuch eine vektorielle Grösse — der Gesamtimpuls — erhalten ist.
Bisher haben wir nur das Ergebnis des Rückstossversuches auf eine
verschiedene Art neu dargelegt.
Das Gesetz der Impulserhaltung ist aber ganz allgemein gültig.
Es kann so formuliert werden:
Ein “isoliertes” System ist ein System, in dem die Teilchen
keine resultierende äussere Kraft fühlen. In einem solchen
isolierten System ist der Gesamtimpuls erhalten.
Das Gesetz der Erhaltung des Impulses ist eines der grundlegenden
und allgemein gültigen Gesetze der Physik.
Wir kennen keine Ausnahmen von diesem Prinzip.
Wir haben noch nicht viel von Kräften gesprochen. Von Kräften wird
ein bisschen später gesprochen.
Wir müssen nur verstehen, dass es im Rückstossversuch keine
äussere Kraft gab.
Wir haben im Versuch eine Luftkissenbahn verwendet, so dass keine
äussere resultierende Kraft auf den Wagen wirkt. Die nach unten gerichtete Gewichtskraft eines Wagens wurde von der Luft der Luftkis-
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
74
Masse, Impulserhaltung und die Mechanik
die vom Eis ausgeübt wird. Die Reibung mit dem Eis ist vernachlässigbar. Das System ist dehalb isoliert, und der Gesamtimpuls wird
erhalten.
Da sich der Mann und der Junge ursprünglich in Ruhe befinden, ist
der Gesamtimpuls gleich null.
r
r
r
r
pA + pB = 0
mA v A + mB v B = 0
⇒
r
70 kg
m r
(0, 3m / s) = 0, 6m / s
vB = A vA =
35 kg
mB
Der Mann hat die doppelte Masse des Jungen und der Junge bewegt
sich mit der doppelten Geschwindigkeit des Mannes. Nach 5
Sekunden hat sich der Mann 1,5 Meter, der Junge 3 Meter weit vom
Ausgangspunkt weg bewegt, so dass sie nun 4,5 Meter voneinander
entfernt sind.
2.4 Das erste Newtonsche Gesetz:
Trägheit
Eine erste Folgerung aus dem Impulserhaltungsgesetz ist das
Trägheitsprinzip.
⇒
Wir sehen, dass für ein isoliertes System gelten muss:
r
dptot
=0
dt
r
ptot = Konst
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das erste Newtonsche Gesetz: Tr gheit
Wenn ein System nur ein Teilchen besitzt, ist der Gesamtimpuls gleich des Impulses des Teilchens, und wir erhalten
r
r
r
dp
d ( mv )
dv
=0=
=m
dt
dt
dt
dv
=0 ⇒
dt
r
v = Konst.
r
⇒ a ( t) ≡ 0
wobei wir angenommen haben, dass sich die Masse des Teilchens mit
der Zeit nicht ändert.
Es folgt,
Wir sagen,
Trägheitsprinzip: Ein Teilchen bleibt in Ruhe oder bewegt
sich mit konstanter Geschwindigkeit, wenn keine resultierende Kraft auf es wirkt.
In den Zeiten vor Galileo Galilei (1564-1642) nahm man an, dass die
Kraft in Verbindung mit der Geschwindigkeit eines Teilchen war.
Man dachte, dass eine Kraft wirken muss, um ein Teilchen in Bewegung zu halten. Je grösser die Kraft, desto schneller bewegt sich das
Teilchen. In unserer täglichen Erfahrungen ist dieses Denken nicht
ganz so falsch.
Galileo und Newton erkannten, dass in den meisten Situationen auf
der Erdoberfläsche Körper sich nicht reibungsfrei bewegen.
Das heisst, in den meisten Fällen sind die Körper nicht isoliert, weil
die resultierende Kraft nicht gleich null ist.
75
Wenn ein Gegenstand geworfen wird und sich in der Luft bewegt,
wirkt auf ihn die Gravitationskraft ein und er fühlt auch die Reibung
von der Luft (d.h. Luftwiderstand).
Physik
76
Masse, Impulserhaltung und die Mechanik
Wenn ein Gegenstand sich auf dem Boden bewegt, fühlt er die Reibung zwischen seiner Fläche und der Bodenfläche.
Aus diesen Beobachtungen haben Galileo und Newton sich vorgestellt, was für eine Bewegung ein Teilchen machen würde, wenn es sich
frei bewegt. Sie sind zum Schluss bekommen, dass die Kraft mit der
Beschleunigung zusammenhängt, so dass das Trägheitsprinzip gelten
muss.
2.5 Das zweite Newtonsche Gesetz:
Aktionsprinzip
2.5.1 Die Definition der Kraft
Der Begriff der Kraft, wie der der Geschwindigkeit oder der Beschleunigung, ist uns aus dem Alltag vertraut.
Wenn wir einen Gegenstand ziehen oder stossen, üben wir eine Kraft
auf ihn aus. Je stärker wir ziehen oder stossen, desto grösser ist die
Kraft. Die Richtung, in welcher wir ziehen oder stossen, ist die Richtung der Kraft. Das heisst, die Kraft ist eine vektorielle Grösse, die
eine Richtung und einen Betrag besitzt.
In der mathematischen Sprache benutzen wir einen Vektor F .
Schon im Trägheitsprinzip haben wir bemerkt, dass die Kraft mit der
Beschleunigung zusammenhängt. Wir werden nun zwei zusätzliche
Beispiele betrachten, bei denen die Beziehung zwischen Kraft und
Beschleunigung ganz klar ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das zweite Newtonsche Gesetz: Aktionsprinzip
Als wir von der Wurfbewegung gesprochen haben, haben wir die
Beziehung zwischen Kraft und Beschleunigung gesehen.
Wenn der Luftwiderstand vernachlässigt wird, ist die Beschleunigung
des Geschosses nach unten zum Zentrum der Erde gerichtet.
Wenn wir auf der Erdoberfläche stehen, fühlen wir unser Gewicht,
das unseren Körper nach unten zieht. Die Gravitationskraft zwischen
unserem Körper und der Erde ist für eine solche nach unten gerichtete
Anziehung verantwortlich.
Die Gravitationskraft zwischen dem Geschoss und der Erde verursacht ebenfalls die nach unten gerichtete Beschleunigung des Geschosses.
Als zweites Beispiel betrachten wir die Kreisbewegung. Wir haben
gesehen, dass eine nach dem Zentrum des Kreises gerichtete Beschleunigung auf das Teilchen wirken muss, damit das Teilchen sich auf
einer Kreisbahn bewegt (siehe Kapitel 1.3),
n
de
Fa
a
Ball
77
In diesem Fall zieht der Faden den Ball. Siehe Abb. 4. Die Beschleunigung des Balles hat dieselbe Richtung, wie die vom Faden
ausgeübte Kraft.
r
FIGURE 4. Die Beschleunigung des Balles hat dieselbe Richtung, wie die
vom Faden ausgeübte Kraft.
Physik
78
Masse, Impulserhaltung und die Mechanik
Grundsätzlich kann man diese Gleichung benutzen, um die Anwesenheit einer Kraft zu beweisen, durch die Beschleunigung, die sie bei
einem Teilchen bewirkt.
Das Newtonsche Gravitationsgesetz
i
Physik
r
r
⇒ FG = mg
79
Newton behauptete 1665 (als er 23 Jahre alt war), dass dieselbe Kraft
für den Fall von Gegenstände (z.B. ein Apfel) auf der Erde und für
die Bewegung der Planeten verantwortlich ist.
Kepler (1571-1630) analysierte die astronomischen Beobachtungen
von Brahe (1546-1601). Dabei fand er empirisch drei Gesetze über
die Bewegung der Planeten. Das erste Keplersche Gesetz sagt, dass
alle Planeten sich auf elliptischen Bahnen bewegen, in deren einem
Brennpunkt die Sonne ist.
Die Beziehung zwischen Erdbeschleunigung und Gravitationskraft
hat die Existenz einer allgemeinen, zwischen allen Körpern wirkenden, Kraft bewiesen.
2.6 Das Newtonsche Gravitationsgesetz
wobei m die Masse des Teilchens ist.
tionskraft F G bestimmen als:
r
r
r F
r F
a=
⇒ g= G
m
m
Dank der gemessenen Erdbeschleunigung g , können wir die Gravita-
tionskraft F G bestimmen?
Zum Beispiel, wie können wir in einer Wurfbewegung die Gravita-
Dass die Beschleunigung mit der Kraft zusammenhängt, ist klar.
Welche Rolle spielt dann die Masse?
Die Beschleunigung eines Teilchens ist umgekehrt proportional zu
seiner Masse und direkt proportional zur resultierenden Kraft, die auf
es wirkt:
r
r F
a=
m
Die resultierende Kraft ist die Vektorsumme aller Kräfte, die am
Teilchen angreifen.
i
r
r
F = ∑ Fi
2.5.2 Das zweite Newtonsche Gesetz
i
∑ F = ma
Das zweite Newtonsche Gesetz wird gewöhnlich als
r
r
ausgedrückt.
Die Einheit der Kraft ist 1 Newton (N) und entspricht jener Kraft, die
benötigt wird, um einen Körper der Masse 1 kg mit 1 m/s2 zu beschleunigen.
Die Gleichung kann als Definition der Kraft verwendet werden.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
80
Masse, Impulserhaltung und die Mechanik
Zuerst hat Newton 1686 mit einer mathematischen Berechnung bewiesen, dass eine solche Gravitationskraft die elliptischen Bahnen der
Planeten um die Sonne erklären kann.
Er behauptete, dass diese Kraft zwischen allen Objekten im Universum wirkt.
m1
r1
ex
r12
Die Definition des Vektors r12.
x
F12
r2
m2
Nach dem allgemeinen Newtonschen Gravitationsgesetz ist diese
Kraft immer anziehend, proportional zu den Massen der beiden
Körper und umgekehrt proportional zum Quadrat des Abstandes
zwischen ihnen. Sie liegt in der Verbindungslinie zwischen ihnen.
y
ey
FIGURE 5.
In der mathematische Sprache wird die Gravitationskraft geschrieben
als (siehe Abb. 5):
r
r
Gm
1m2 r12
F12 = −
r12 2 r12
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
G = 6,67 × 10–11 Nm2/kg2
wobei m1 und m2 zwei Punktmassen sind, und r 12 ⁄ r 12 ein Einheitsvektor, der von m1 nach m2 zeigt, und G ist die universelle
Gravitationskonstante, die den Wert
hat.
Aus der Definition der Gravitationskraft kann man sehen, dass beide
Körper dieselbe Anziehungskraft, aber mit entgegengesetztem Vorzeichen (siehe Abb. 6) spüren:
r
r
r
r
F12 = − F21
F12 = F21
m1
F21
F12
m2
FIGURE 6. Die Gravitationskraft ist immer anziehend, und beide Körper
spüren dieselbe Anziehungskraft, aber mit entgegengesetztem Vorzeichen.
81
Die Gravitationskraft wird von der Gegenwart anderer Massen nicht
gestört. Im Fall, dass es viele Massen in der Nähe eines Körpers gibt,
ist die Gesamtgravitationskraft auf den Körper gleich der Vektor-
Physik
82
Masse, Impulserhaltung und die Mechanik
summe aller Gravitationskräfte, die die anderen Körper auf ihn
ausüben.
2.6.1 Gravitationskraft eines homogenen Rings
Wir berechnen die gesamte Gravitationskraft auf der Achse eines
homogenes Ringes. Abb. 7 zeigt den Ring der Gesamtmasse m mit
dem Radius a und eine Punktmasse m0, die im Abstand x vom Kreismittelpunkt auf der Ache sitzt.
Auf dem Ring wählen wir ein differentielles Massenelement dm.
Diese Masse dm ist klein genug, um als Punktmasse betrachtet werden zu können.
Die Masse dm befindet sich im Abstand s von der Punktmasse m0 auf
der Achse. Die Verbindungslinie zwischen den Punktmassen bildet
den Winkel α mit der Ringachse.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
dm
Homogener Ring
a
Das Newtonsche Gravitationsgesetz
FIGURE 7.
x
s
α
|dF|
|dF|cosα
( dm)( m0 )
s2
m0
X
Die Kraft dF , die von dm auf m0 wirkt, zeigt in Richtung der Masse
dm, und hat den Betrag dF:
dF = G
Wir müssen jetzt über alle Massenelemente dm des Ringes integrieren.
83
Aus der Symmetrie der Anordnung schliessen wir, dass die resultierenden Kraft entlang der Achse des Ringes verläuft. Alle Kräfte senkrecht zur Achse kompensieren sich gegenseitig.
Physik
84
Masse, Impulserhaltung und die Mechanik
Die resultierende Kraft liegt in der Symmetrieachse und zeigt in die
negative x-Richtung. Wir schreiben diesen Vektor als
r
r
r
r
r
F = Fx ex + Fy ey + Fzez = Fx ex
wobei wir Fy=0, und Fz=0 benutzt haben.
Der Betrag des Vektors wird durch Integration über alle Elemente des
Ringes erhalten
Fx = ∫ dFx
( dm)( m0 )
cos α
= −G ∫
s2
Gm
= − 2 0 cos α ∫ dm
s
Gmm0
cos α
s2
=−
Gmm0
x 2 + a2
und
x
x 2 + a2
cos α =
= − Gmm0
2
x
3/ 2
x 2 + a2
+ a2 )
x
=
s
(x
x
wobei m die Gesamtmasse des Ringes ist. Wir schreiben dieses
Ergebnis als Funktion des Abstandes x:
s2 = x 2 + a2
und deshalb gilt
Fx ( x ) = −
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
2.6.2 Gravitationskraft einer homogenen Kugelschale
Mit dem Ergebnis des Ringes können wir nun die Gravitationskraft
auf eine Punktmasse m0 im Abstand r vom Mittelpunkt einer
Kugelschale mit Radius R und Masse M berechnen.
Wir betrachten den Fall, dass der Punkt ausserhalb der Kugelschale
liegt, r>R.
Ein Streifen der Kugel kann als Ring der Breite Rdθ mit dem Umfang
2πa=2πRsinθ betrachtet werden (siehe Abb. 8).
85
Die Gravitationskraft der Kugelschale werden wir durch Integration
über alle Streifen auf der Kugelschale erhalten.
dA = (2πa)( Rdθ ) = 2πR sin θRdθ = 2πR 2 sin θdθ
Die Fläche dA des Streifens ist gleich
Physik
86
R
dθ
a
Homogene Kugelschale.
θ
Masse, Impulserhaltung und die Mechanik
FIGURE 8.
x
r
s
dFx
a=Rsinθ
2πR 2 sin θdθ M
dA
=M
= sin θdθ
4πR 2
2
A
m0
X
Mit der Gesamtmasse der Kugel gleich M, ist die Masse des Streifens
gleich
dM = M
wobei wir für die Kugeloberfläche A=4πR2 verwendet haben.
(x
2
+ a2 )
x
3/2
Mit dem Ergebnis für einen homogenen Ring erhalten wir
dFx = −G( dM )( m0 )
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
Die Geometrie der Anordnung ist so, dass gilt
= r 2 − 2 Rr cosθ + R 2
R
x = ( r − R cosθ ) = r(1 − cosθ )
r
x 2 + a 2 = ( r − R cosθ ) 2 + ( R sin θ ) 2
Die vom differentiellen Ring ausgeübte Kraft ist
R
r(1 − cosθ )
Mm0
r
sin θdθ
2 ( r 2 − 2 Rr cosθ + R 2 ) 3 / 2
R
r(1 − cosθ )
M
r
dFx = −G sin θdθ ( m0 ) 2
3/2
2
(r − 2Rr cosθ + R 2 )
= −G
dz
= − sin θ ⇒ dz = − sin θdθ
dθ
Wir führen die folgende Variablentransformation durch:
z ≡ cosθ
R
r(1 − z)
Mm0
r
dz
2 ( r 2 − 2 Rrz + R 2 ) 3 / 2
womit wir die Gleichung für die Kraft so schreiben können
dFx = G
180
0
∫ dθ
⇒
−1
1
∫ dz
87
Um die Gesamtgravitationskraft zu bestimmen, müssen wir über alle
Streifen integrieren. D.h.,
Physik
88
Masse, Impulserhaltung und die Mechanik
−1
1
∫ (r
2
Mm0 −2
Mm
r = − G 2 0
r
2 r3
R
1− z
2
r
3 / 2 dz = − 3
r
− 2 Rrz + R 2 )
Durch direkte Integration kann man beweisen, dass
Wir erhalten damit
Fx = G
( r > R)
Die Kraft muss wegen der Symmetrie radial sein, deshalb können wir
eine vektorielle Gleichung der Gravitationskraft einer Kugelschale
schreiben als
r
r
GMm
0 r
F=−
r2 r
D.h., die Kraft ist dieselbe wir für eine Masse M im Zentrum der
Kugel! Die Gravitationskraft der Kugelschale ist die gleiche, wie
wenn ihre Masse im Zentrum der Kugel konzentiert wäre.
2.6.3 Gravitationskraft einer homogenen Vollkugel
Wir verwenden nun dieses Ergebnis, um die Gravitationskraft einer
Vollkugel zu bestimmen.
Wir stellen uns vor, dass die Kugel aus einer kontinuierlichen Menge
von Kugelschalen zusammengesetzt ist.
Da die Gravitationskraft jeder Kugelschale die gleiche ist, wie wenn
ihre Masse im Zentrum konzentiert ist, entspricht die Gravitationsk-
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
( r > R)
raft der gesamten Kugel der in ihrem Mittelpunkt konzentrierten Gesamtmasse M:
r
r
GMm
r
F=− 2
r
r
2.6.4 Die Erdbeschleunigung
Wir sagen, dass die Gravitationskraft eine schwache Kraft ist.
±11
(1 m) 2
Nm2 / kg 2 )(80 kg)(80 kg)
Zum Beispiel ist die Kraft zwischen zwei Studenten, die sich in
einem Abstand von 1 Meter befinden und je eine Masse von 80kg
haben, ungefähr
(6,67 × 10
r Gm1m 2
F =
r2
=
≈ 4 × 10 −7 N
Dabei haben wir die Studenten als Punktmassen betrachtet. Ein
solcher Betrag ist praktisch unmessbar.
89
Die Gravitationskraftwirkung ist messbar, wenn wir grosse Massen
betrachten. Sie bindet z.B. Sterne in Galaxien (siehe Abb. 9), Galaxien in sogenannten “Superclusters”, und sie ist auch verantwortlich
für die Bewegung der Planeten um die Sonne, die der Satelliten um
die Planeten, und den Fall der Körper auf der Erde.
Physik
90
Masse, Impulserhaltung und die Mechanik
FIGURE 9. Eine Galaxie. Die Sterne werden durch die Gravitationskraft
aneinander gebunden.
Wir spüren die Erdbeschleunigung deshalb, weil die Masse der Erde
sehr gross ist:
mE ≈ 6.0 × 10 24 kg
Die Gravitationskraft der Erde.
Erde
Fg
Das Newtonsche Gravitationsgesetz
FIGURE 10.
rE
=
Fg
mE
Wir berechnen die Gravitationskraft, die die Erde auf eine auf der
Erdöberfläche liegende Masse m ausübt, als
r
GmE m
FG =
2
wobei mE die Masse der Erde und rE der Radius der Erde sind.
⇒
g=
GmE
rE2
91
Um die Erdbeschleunigung zu bestimmen, benutzen wir das zweite
Newtonsche Gesetz:
GmE m
= mg
rE2
d.h., g ist unabhängig von m.
⇒
Die Erde übt auf den Körper eine Kraft aus, die dieselbe ist, als ob
ihre ganze Masse im Zentrum der Erde konzentriert wäre (siehe Abb.
10).
Physik
r
r
FG = mg
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Nun verstehen wir den Betrag der Erdbeschleunigung und warum er
unabhängig von der Masse eines Körpers ist.
rErde
92
Masse, Impulserhaltung und die Mechanik
Aus dieser Gleichung folgt die Messung der Masse der Erde:
gr 2 (9.8m / s 2 ) × (6370 × 10 3 m)2
mE = E =
6.67 × 10 −11 Nm 2 / kg 2
G
= 6.0 × 10 24 kg
wobei wir die Beziehung 1 Newton = 1 kg m/s2 benutzt haben.
Wir bemerken, dass diese Zahl nicht genau gleich die gemessenen
Erdbeschleunigung ist, weil (a) die Erde nicht genau homogen und
spärisch ist; (b) die Erde rotiert (wird später behandelt).
Wie gross ist die Erdbeschleunigung, die auf einen Gegenstand wirkt,
der sich in einer Höhe h = 2500 km über der Erdoberfläche befindet?
FG
GmE m
=
=
m m(rE + h)2
Die Beschleunigung ist gleich
a=
GmE
=
(rE + h)2
≈
(6.67 × 10 −11 Nm 2 / kg 2 )(6.0 × 10 24 kg)
=
((6370 + 2500) × 10 3 m)2
g
2
≈ 5, 087 m / s 2
Andere Werte sind in Tabelle 1 aufgelistet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
9,81
Beschleunigung (m/s2)
mittlere Erdbeschleunigung
wo
f r verschiedene H hen.
Höhe (km)
TABLE 1. Erdbeschleunigung
0
Halbe Erdbeschleunigung
Space Shuttle
Höchster Ballon mit Mensch
8,70
Mt. Everest
5,087
9,71
400
Geostationäre künstliche
Satelliten
9,80
2500
0,225
Mond
8,8
35700
0,0027
36,6
380000
2.6.5 Satellitenbewegung
Zuerst hat Newton sein universelles Gravitationsgesetz formuliert,
um die Bewegung des Mondes um die Erde zu erklären. Er beobachtete, dass der Mond sich auf einer Kreisbahn um die Erde bewegt.
Der Mond muss in Richtung der Erde beschleunigt werden, um sich
auf einer solchen Kreisbahn zu bewegen. Siehe Abb. 11.
Weil der Radius der Kreisbewegung des Mondes ungefähr gleich
3,82x108 m ist, muss die Erdbeschleunigung viel kleiner sein als auf
der Erdoberfläche.
r
v2
aMond = Mond
rMond
93
Um die Beschleunigung des Mondes zu bestimmen, benutzen wir die
Gleichung für eine gleichförmige Kreisbewegung, d.h.
Physik
94
Masse, Impulserhaltung und die Mechanik
wobei vMond die Geschwindigkeit des Mondes um die Erde ist, und
rMond der Radius der Kreisbahn.
Wir bemerken, dass die Umlaufzeit (die Periode) des Mondes T gleich 27,32 Tagen oder 2,36x106 Sekunden ist. Die Geschwindigkeit
des Mondes ist gleich
r
vMond
2πrMond
=
T
2π × (3, 82 × 108 m)
2, 36 × 10 6 s
=
V
≅ 1, 02 × 10 3 m / s
Mond
Der Mond wird zum Zentrum der Erde beschleunigt.
Erde
F
oder ungefähr 1 Kilometer pro Sekunde.
FIGURE 11.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
Die Beschleunigung ist dann
(1, 02 × 10 3 m / s)2
3, 82 × 108 m
r
v2
aMond = Mond
rMond
=
≅ 2, 70 × 10 −3 m / s 2
Wenn wir diese Zahl mit der Beschleunigung auf der Erdoberfläche
vergleichen, finden wir
aMond 2, 70 × 10 −3 m / s 2
=
g
9, 81 m / s 2
≅ 3 × 10 −4
2
2
d.h., die Beschleunigung des Mondes ist ungefähr 3300 Mal kleiner
als die Erdbeschleunigung g. Diese Zahl kann mit dem Verhältnis der
Radien im Quadrat verglichen werden:
rErde
6370 × 10 3 m
≈
3, 82 × 108 m
rMond
≈ 3 × 10 −4
Dieses Ergebnis beweist, dass die Gravitationskraft proportional zum
Quadrat des Abstandes ist.
Wir bemerken nun, dass das allgemeine Gravitationsgesetzt sagt, dass
durch die Gravitationskraft Körper einander anziehen.
95
Deshalb spüren der Mond und die Erde dieselbe Anziehungskraft,
aber mit entgegengesetztem Vorzeichen (siehe Abb. 12).
Physik
96
Masse, Impulserhaltung und die Mechanik
FG
Drehpunkt
Dass eine solche Kraft wirkt, können wir z.B. durch die Flut und
Ebbe des Meers bemerken.
Mond
–FG
Erde
FIGURE 12. Der Mond und die Erde ziehen einander mit derselben
Gravitationskraft aber mit entgegengesetztem Vorzeichen an. Der
Drehpunkt ist ≈4700 km vom Erdzentrum entfernt.
Beide, Erde und Mond, werden durch die Gravitationskräfte beschleunigt.
( 7, 36 × 10 22 kg)
( 3, 82 × 10 8 m)
(6 × 10 24 kg)
M Mond
r
M Erde Mond
Eine Folgerung daraus ist, dass wenn wir beide Körper als ein einziges System betrachten, der Mond und die Erde sich um einen Drehpunkt drehen. Dieser Drehpunkt ist ≈ 4700 km vom Erdzentrum
entfernt:
rDrehpunkt =
=
≈ 4, 7 × 10 6 m
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Newtonsche Gravitationsgesetz
Nun betrachten wir den Gesamptimpuls des Systems Erde-Mond. Es
gilt
r
r
r
P = pErde + pMond
r
r
= M Erdev Erde + M Mond v Mond
tot
Die zeitliche Ableitung des Gesamtimpulses ist gleich
r
r
r
dPtot dpErde dpMond
=
+
dt
dt
dt
r
r
dv
dv
= M Erde Erde + M Mond Mond
dt
dt
r
r
= M Erde aErde + M Mond aMond
Jetzt berechnen wir die Beschleunigungen des Mondes und der Erde:
r
r
r
r
M M
− FG
1 rMond
1 rMond
aErde =
= G Erde Mond
= GM Mond
2
2
M
r
r
M
Erde
Erde
Mond rMond
Mond rMond
r
r
r
M M
F
1 r
1 rMond
G
Mond
= −G Erde Mond 2
= −GM Erde 2
M Mond
rMond rMond
rMond rMond
M Mond
r
aMond =
Das heisst, der Gesamtimpuls des Systems Erde-Mond ist erhalten
r
r
r
1 r
1 rMond
dP
tot
Mond
= M Erde GM Mond 2
+ M Mond −GM Erde 2
dt
rMond rMond
rMond rMond
=0
97
Wir verstehen dieses Ergebnis: in diesem Fall können wir das System
Erde-Mond als ein isoliertes System betrachten, weil die Gravitation
nur als interne Kräfte wirkt. Das Impulserhaltungsgesetz sagt voraus,
dass in einem solchen Fall der Gesamtimpuls erhalten sein muss.
Physik
98
Masse, Impulserhaltung und die Mechanik
Eine ähnliche Situation ergibt sich auch, wenn wir z.B. frei fallen
(siehe Abb. 13). Wir ziehen die Erde mit demselben Betrag an, mit
dem die Erde uns anzieht.
Natürlich sind die Beschleunigungen ganz verschieden voneinander.
Zum Beispiel, für einen Mensch der Masse 60kg gilt
r
r
r
− mg
F
m r
g
=−
aErde = G =
M Erde M Erde
M Erde
Fg
Fg
Erdoberfläche
FIGURE 13. Wenn wir frei fallen, ziehen wir die Erde mit demselben Betrag
an, mit dem die Erde uns anzieht.
60 kg
(9, 81m / s2 )
6 × 10 24 kg
Der Betrag der Beschleunigung der Erde ist ungefähr
r
aErde =
≈ 10 −22 m / s2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
R ckstoss der Rakete
2.7 Rückstoss der Rakete
Der Raketenantrieb folgt aus der Impulserhaltung.
Eine Rakete erzeugt ihren Schub, indem Treibstoff verbrannt und das
dadurch erzeugte Gas nach hinten ausgestossen wird. Die Rakete
wird durch den Rückstoss nach vorne getrieben.
mK
vK
mG
r
r
r
r
r
Ptot = pGewehr + pKugel = mG vG + mK vK = 0
vG = −
mG
99
vG
Im Fall des zurückgerichteten Rückstosses eines Gewehres, wenn die
Gewehrkugel vorwärts geschossen wird, folgt aus der Impulserhaltung
und es gilt
mK
so dass, wenn mK << mG ist, ist vG << vK.
vK
Gewehr
Impulserhaltung während des Rückstosses eines Gewehres.
Gewehrkugel
FIGURE 14.
Versuchsexperiment. Rückstoss mit Wagen und CO2-Flasche
Physik
100
Masse, Impulserhaltung und die Mechanik
Der Gesamtimpuls ist gleich
R ckstoss der Rakete
d.h.,
p = M ( t )v
p( t′ ) = Mv + Mdv − vdM − dMdv + vdM − udM
≈ Mv + Mdv − udM
p( t′ ) = ( M − dM )(v + dv ) + dM (v − u)
Der Gesamtimpuls ist deshalb gleich
Wenn das Gas mit einer Geschwindigkeit u relativ zur Rakete ausgestossen wird, bewegt es sich mit einer Geschwindigkeit v–u.
Nach dem Zeitintervall ∆t hat die Rakete eine Masse M–dM (wobei
dM positiv ist) und bewegt sich mit einer Geschwindigkeit v+dv.
Das CO2 Gas wird nach hinten ausgestossen. Durch den Rückstoss
wird der Wagen (und der Mensch) nach vorne getrieben.
Versuchsexperiment. Rückstoss ist unabhängig vom Medium
Mit dem Wasserstrahl in Wasser und Luft bemerken wir, dass der
Rückstoss unabhängig vom Medium ist.
Der Rückstoss hängt nur von der Masse des ausgestossenen Stoffes
ab.
Wenn man Raketen z.B. in den Weltraum schiesst, drückt die Rakete
gegen das Gas, das von ihr ausgestossen wird.
Luft hat in diesem Fall nichts zu tun! Die Rakete stösst sich nicht von
der Luft ab.
Versuchsexperiment. Rückstoss mit Raketenwagen
wobei wir den Term dMdv weggelassen haben, weil er ein Produkt
aus zwei sehr kleinen Grössen ist und daher im Vergleich zu den
anderen Grössen vernachlässigbar ist.
Nun berechnen wir die sogenannte Raketengleichung.
Wir brauchen nur das Impulserhaltungsgesetz.
p( t′ ) − p( t) = Mv + Mdv − vdM − dMdv + vdM − udM
≈ Mdv − udM
≡0
Die Impulsänderung während des Zeitintervalls ∆t ist
v = Geschwindigkeit der Rakete
u = Ausstossgeschwindigkeit relativ zur Rakete
M(t) = Masse der Rakete zur Zeit t.
Mdv = udM
⇒
M
dv
dM
=u
dt
dt
wobei wir die Impulserhaltung benutzt haben. Es gilt daher
Physik
101
Wir definieren die folgenden Grössen:
1.
2.
3.
Wir berechnen die Impulsänderung des gesamten Systems während
eines Zeitintervalls ∆t. Aus der Impulserhaltung muss die
Impulsänderung gleich null sein.
Zur Zeit t bewegt sich die Rakete mit der Anfangsgeschwindigkeit v.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
102
Masse, Impulserhaltung und die Mechanik
dM
dt
Aus m(dv/dt)=F folgt, dass auf die Rakete eine Schubkraft F wirkt,
mit dem Betrag
F=u
und daher die Rakete beschleunigt wird.
⇒
v
0
M0
M0 − m
∫ dv = u ∫
dM
M
Wir integrieren nun die Raketengleichung und erhalten
dM
dv = u
M
wobei M0 die Anfangsmasse der Rakete, und m die Gesamtmasse des
ausgestossenen Gases ist.
Deshalb ist die Geschwindigkeit der Rakete als Funktion der ausgestossenen Masse gleich
⇒
v>u
M0
ln
>1
M0 − m
M0
v = u(ln( M0 ) − ln( M0 − m)) = u ln
M0 − m
Für den Fall M0/(M0–m)>e gilt
M0
>e
M0 − m
⇒
Dann bewegt sich für einen Beobachter das ausgestossene Gas in der
gleichen Richtung wie die Rakete.
Experiment: Die letzten Kugeln rollen in gleicher Richtung wie der
Wagen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der Bewegungen mit Hilfe der Kr fte
2.8 Berechnung der Bewegungen mit
Hilfe der Kräfte
Die Newtonschen Gesetze sorgen für eine Verbindung zwischen den
dynamischen Grössen Masse und Kraft einerseits, und den kinematischen Grössen Beschleunigung, Geschwindigkeit und Verschiebung
andererseits.
r
r
r
dv
i
=m
r
d 2r
dt 2
Wir können die Bewegungsgleichung eines Teilchens direkt mit
diesem Gesetze finden. Es gilt
i
∑ F = ma = m dt
D.h., wenn alle Kräfte (oder die resultierende Kraft) bekannt sind, die
auf ein Teilchen wirken, können wir die Beschleunigung des Teilchens
berechnen.
Oder umgekehrt, wenn wir die Beschleunigung eines Teilchens, oder
die zeitliche Ableitung seiner Geschwindigkeit, oder die zweite zeitliche Ableitung seiner Ortsvektorfunktion kennen, können wir die
resultierende Kraft, die auf das Teilchen wirkt, bestimmen.
Diese Gleichung kann auch mit Hilfe des Impulses ausgedrückt werden:
r
r
r
r
dv d ( mv ) dp
F=m
=
=
dt
dt
dt
wobei p der Impuls des Teilchens ist.
103
Wenn keine Kraft auf das Teilchen wirkt, ist sein Impuls erhalten, d.h.
er ändert sich nicht mit der Zeit.
Physik
104
Masse, Impulserhaltung und die Mechanik
In der Natur beobachten wir verschiedene Arten von Kräften.
Wir werden uns mit den Kräften, die auf makroskopische Gegenstände wirken, beschäftigen.
Diese Kräfte, sogenannte Kontaktkräfte, werden z.B. von Federn,
Fäden oder Oberflächen ausgeübt, wenn diese in direktem Kontakt
mit den Gegenständen sind.
2.8.1 Die Federkraft
Um die von einer Feder ausgeübte Kraft einfach zu studieren, können
wir Massen an der Feder aufhängen. Siehe Abb. 15.
Wenn die Masse in Ruhe ist, ist ihre Beschleunigung gleich null.
D.h., die Vektorsumme der Kräfte, die auf die Masse wirken, ist gleich null.
In diesem einfachen Fall müssen wir nur zwei Kräfte betrachten: die
i
r
r
r
r
nach unten gerichtete Gravitationskraft mg und die nach oben gerichtete Federkraft F .
Es gilt:
i
∑ F = F + mg = ma = 0
wobei m die aufgehängte Masse ist und a ihre Beschleunigung. Es
folgt daraus, dass der Betrag der Federkraft gleich mg ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
250
200
150
100
50
20
Masse (g)
300
Berechnung der Bewegungen mit Hilfe der Kr fte
x
50 gm
50 gm
Die Federkraft.
50 gm
FIGURE 15.
40
80
100
F = k(x – x 0)
60
x 0= 35.9cm
Länge
120cm
Jetzt bemerken wir, dass wenn wir mehr Masse aufhängen, sich die
Feder verlängert.
Experimentell beobachten wir, dass bei kleiner Verlängerung die
Länge der Feder zur wirkenden Kraft proportional ist. Diese Beziehung ist als Hookesches Gesetz bekannt und kann geschrieben werden als
F = − k ( x − x0 ) = − k∆x
105
wobei k die Federkonstante, x0 die Länge der Feder, wenn keine
Kraft auf sie wirkt, und ∆x die Verschiebung vom Ruhestand ist.
Physik
106
Masse, Impulserhaltung und die Mechanik
Die Einheit der Federkonstante ist N/m.
Die Gleichung enthält ein negatives Vorzeichen. Für ∆x positiv zeigt
die Federkraft in die negative Richtung. Für ∆x negativ (d.h. bei
zusammengedrückter Feder) zeigt die Federkraft in die positive Richtung. Es folgt, dass die Federkraft versucht, die Feder in ihren
ursprünglichen Zustand zurückzuführen.
Man spricht von Rückstellkraft.
Berechnung der Bewegungen mit Hilfe der Kr fte
2.8.2 Fadenkräfte
Wenn wir an einem Faden ziehen, dann spannt sich der Faden und
zieht mit einer gleich grossen, aber entgegengesestzten Kraft zurück.
Wir können uns einen Faden als eine Feder vorstellen, die eine solch
grosse Federkonstante besitzt, dass seine Verlängerung während der
Kraftwirkung vernachlässigbar ist.
Man spricht von masselosen Fäden. D.h. die Masse der Fäden ist
viel kleiner als die Massen der Gegenstände, die an die Fäden
gebunden werden.
FIGURE 17.
Physik
F1
F1
(1)
(1)
S1
S1 =
S2 = S
S2
(2)
(2)
F2
F2
Fadenkraft. Zwei Menschen ziehen am Faden.
107
Wir betrachten die Situation der Abb 17. Zwei Menschen ziehen an
einem Faden.
Siehe die Kräftediagramme in Abb. 16.
x
Ein Faden ist eine sehr bequeme Vorrichtung, um eine Kraft zu übertragen.
x
x
-k∆x
x0
x x0
FIGURE 16. Federkraft Diagramm.Weil die Federkraft versucht, die Feder
in ihren ursprünglichen Zustand zurückzuführen, spricht man von
Rückstellkraft.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
108
Masse, Impulserhaltung und die Mechanik
Wir analysieren die Anordnung der Kräfte.
Die Kräfte müssen entlang des Fadens wirken, weil der Faden nicht
seitlich ziehen kann.
Der Mensch (1) zieht nach links mit einer Kraft F 1 , und der Mensch
(2) zieht nach rechts mit einer Kraft F 2 . Die Kräfte sind entgegengesetzt, deshalb ist der Faden gespannt.
Die Beschleunigung des Fadens ist (Gravitationskraft wird vernachlässigt)
r r
r
mFaden aFaden = ( F1 + F2 )
Wenn wir den Faden als wirklich masselos betrachten, gilt
r r
r
r
( F1 + F2 ) = 0
⇒ F1 = − F2
(Bemerken Sie, dass wenn die resultierende der auf den Faden wirkenden Kraft nicht gleich null ist, wäre die Beschleunigung des Fadens
unendlich!)
Jetzt führen wir die Spannung des Fadens ein.
Wir sagen, dass diese Spannung sich im Faden befindet.
Sie ist für eine Übertragung der Kräfte durch den Faden verantwortlich.
Sie wirkt entlang des Fadens, so dass ein Faden, der zwei Punkte
verbindet, überall dieselbe Spannung besitzt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der Bewegungen mit Hilfe der Kr fte
Wir sagen, dass im Punkt wo der Mensch (1) den Faden zieht, die
und
r r
F2 + S2 = 0
Kraft F 1 kompensiert wird. Dieselbe Situation findet im Punkt (2)
statt. D.h.,
r r
F1 + S1 = 0
Da die Beträge von F 1 und F 2 gleich sind, gilt
r
r
S1 = S2
d.h., die Spannung entlang des ganzen Fadens besitzt denselben
Betrag.
2.8.3 Die Atwoodsche Maschine
Wir betrachten die Anordnung in Abb. 18. Eine solche Anordnung
wird eine Atwoodsche Maschine genannt.
Wir nehmen an, dass der Faden masselos ist und dass die Rolle sich
reibungsfrei bewegen kann.
Wir schreiben das System der Bewegungsgleichungen (Bewegung ist
nur in eine Richtung möglich)
m1a1 = S − m1g
m2 a2 = S − m2 g
109
wobei S die Spannung des Fadens ist. Wir haben zwei Gleichungen
mit drei Unbekannten.
Physik
110
Masse, Impulserhaltung und die Mechanik
h1
S
m1
m 1g
S
m2
m 2g
h2
FIGURE 18. Eine Atwoodsche Maschine mit einem masselosen Faden und
einer reibungsfreien Rolle.
Weil der Faden sich nicht verlängert, gilt
l = h1 + h2
dl d
d
= h1 + h2 = v1 + v2
dt dt
dt
wobei l die Länge des Fadens ist. Mit der zeitlichen Ableitung dieser
Gleichung, finden wir
0=
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
d
d
v1 + v2 = a1 + a2
dt
dt
Berechnung der Bewegungen mit Hilfe der Kr fte
und
0=
und
⇒ a1 = − a2
S=
2 m1m2
g
m1 + m2
1
((m1 − m2 )a1 + (m2 + m1 )g)
2
m2 − m1
g
m2 + m1
m1a1 + m2 a1 = − m1g + m2 g
m1a1 − m2 a1 = 2 S − m1g − m2 g
m1a1 = S − m1g
− m2 a1 = S − m2 g
D.h., die Bewegungsgleichung kann geschrieben werden als
Die Lösung ist
d.h.
a1 =
S=
m2 − m1
g
m2 + m1
Mit Algebra findet man schliesslich
a1 = − a2 =
a1 = a2 =
m2 − m1
g≤g
m2 + m1
111
Die Beträge der Beschleunigungen sind einander gleich. Sie sind gleich
Physik
112
Masse, Impulserhaltung und die Mechanik
d.h. die Beschleunigung der Masse ist kleiner als oder gleich der
Erdbeschleunigung g. Die Spannung wirkt immer entgegen der Gravitationskraft und bremst die Massen.
m =0
⇒
⇒
2
a1 = g und a2 = − g
1
a = − g und a = g
Wir verstehen dieses Ergebnis auch in den Grenzfällen:
2
m1 = 0
In diesen letzten Fällen ist die Spannung gleich null, und die Massen
fallen frei mit einer Beschleunigung gleich g.
Versuchsexperiment. Messung der Beschleunigung mit Wagen.
Wir betrachten eine Anordnung mit einem Wagen, der sich in der horizontalen Richtung bewegen kann, und eine aufgehängte Masse, die
sich in der vertikalen Richtung bewegen kann.
Beide Massen sind mit einem Faden, der sich um eine Rolle dreht,
aneinander gebunden.
Wir betrachten den Faden als masselos und die Rolle als reibungsfrei.
⇒
m
a=
g
M+m
In diesem Fall ist die Spannung die einzige nicht verschwindende auf
den Wagen wirkende Kraft, weil die Gewichtskraft des Wagens von
einer nach oben gerichteten Kraft, die der Tisch ausübt, kompensiert
wird.
Die Bewegungsgleichung ist
S = Ma
mg − S = ma
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
m
g
M
⇒
a∝m
Berechnung der Bewegungen mit Hilfe der Kr fte
Wenn M>>m, gilt
a≅
und
a∝
1
M
wegen der schweren Masse m das System beschleunigt wird;
wegen der trägen Masse M das System “gebremst” wird. Die träge
Masse M des Wagens wirkt gegen seine Beschleunigung.
Wir können sagen, dass
1.
2.
2.8.4 Reibungskräfte
Reibung ist ein kompliziertes und nicht vollständig verstandenes
Phänomen.
Wenn zwei Gegenstände in Kontakt sind und man versucht einen relativ zum anderen zu bewegen, wird eine Reibungskraft erzeugt.
Diese Kraft entsteht durch die Wechselwirkungen der Moleküle eines
Gegenstandes mit denen des anderen. Sie wirkt überall dort, wo die
Oberflächen der Gegenstände in engem Kontakt sind.
Wir betrachten nun das Beispeil der Abb. 19.
die Reibungskraft FR
113
die Gravitationskraft mg;
die Normalkraft FN, die von der schiefen Ebene ausgeübt wird;
Ein Körper befindet sich auf einer schiefen Ebene. In der Abb. sehen
wir die Kräfte, die auf den Körper wirken:
1.
2.
3.
Es ist üblich, die x-Achse parallel zur Ebene zu wählen.
Wir zerlegen die Kräften entlang der x- und y-Achsen.
Physik
114
Masse, Impulserhaltung und die Mechanik
FN
m
mg
FR
x:
y:
mg sin α
− mg cos α
x
y
FN
m
mg
mg
FR
cos
α
mg sin α
Kräftediagramme der schiefen Ebene mit Reibungskraft.
α
Die x- und y-Komponenten der Gewichtskraft sind gleich
α
FIGURE 19.
Haftreibung: Für einen Winkel α, der kleiner ist als der kritische
Winkel αK, gleicht die Reibungskraft die x-Komponente der Gravitationskraft, die entlang der Ebene abwärts wirkt, aus.
Der Körper bewegt sich nicht. Er bleibt in Ruhe.
Wir erhalten
∑ Fx = mg sin α − FR = 0
∑ Fy = − mg cos α + FN = 0
Wir eliminieren mg aus diesen Gleichungen und finden
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
FR
FN
⇒
Berechnung der Bewegungen mit Hilfe der Kr fte
tan α =
FR = FN tan α
Diese Gleichung gilt, wenn der Winkel α kleiner als der kritische
Winkel αK ist.
Wenn der Winkel α grösser als αK ist, kann die Reibungskraft die
Bewegung des Körpers nicht mehr verhindern. Dann wird der Körper
die Ebene hinuntergleiten.
Gewöhnlich drücken wir die maximale Haftreibungskraft aus als
FR = µ H FN
wobei µH die Haftreibungszahl ist. Aus dieser Gleichung sehen wir,
dass die maximale Reibungskraft proportional ist zur Normalkraft,
die zwischen den beiden Oberflächen wirkt.
⇒
µ H = tan α K
Für den kritischen Winkel wird die Haftreibungskraft maximal, und
wir können FH durch µHFN ersetzen
FR = FN tan α K = µ H FN
Gleitreibung: Wenn der Körper sich bewegt, wirkt noch eine Reibungskraft zwischen den Oberflächen des Körpers und der Ebene.
Die Gleitreibungskraft wirkt der Bewegung entgegen.
FR = µG FN
115
Wie im Fall der Haftreibung werden wir die Gleitreibungskraft
schreiben als
Physik
116
Masse, Impulserhaltung und die Mechanik
wobei µG die Gleitreibungszahl ist
Für Winkel grösser als der kritische Winkel gleitet der Körper mit
einer Beschleunigung ax.
Jetzt ist die Reibungskraft gleich µGFN, und wir finden
Fx = mg sin α − µG FN = max
und wir ersetzen FN durch mgcosα
ax = g(sin α − µG cos α )
Durch eine Messung der Beschleunigung, können wir µG bestimmen.
Diese Gleichung gilt nur wenn der Körper sich bewegt, d.h. der
Winkel α ist grösser als der kritische Winkel αK.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 3
Energie
Im Prinzip kann man die Newtonschen Gesetze, die die Kraft und die
Beschleunigung verbinden, verwenden, um ein beliebiges Bewegungsproblem, zu lösen. Die Gesetze können allgemein und in verschiedenen Bereichen benutzt werden, z.B. von der Bewegung eines
Staubkorns bis zu der der Planeten oder der Galaxien.
Die Fälle, in denen wir an der Bewegung von vielen Körpern oder
Teilchen interessiert sind, sind praktisch sehr schwierig zu lösen.
Stellen wir uns z.B. die Schwierigkeit vor, den Stoss zweier Autos in
allen Einzelheiten zu beschreiben. Eine ähnliche Schwierigkeit treffen wir z.B. an bei der Beschreibung einer Explosion.
117
Um solche komplizierten Bewegungen zu beschreiben, können wir
allgemeine Gesetze suchen, die aus Newtons Gesetzen folgen. Mit
deren Hilfe können wir etwas über die komplizierten Bewegungen
sagen.
Physik
118
Energie
Im Fall der Explosion oder des Stosses der Autos kann man das
Impulserhaltungsgesetz benutzen, um etwas über die Bewegung
vorauszusagen.
In diesem Kapitel werden wir uns mit dem Begriff der Energie
beschäftigen. Dieser Begriff ist wichtig, weil es ein allgemeines Prinzip der Erhaltung der Energie gibt. Wie für den Fall der Impulserhaltung, kann die Energieerhaltung benutzt werden, um Vorgänge als
Ganzes zu definieren.
3.1 Definition der Energie
die Strahlungsenergie ist die Energie, die durch Strahlen (z.B.
Licht) ausgesandt oder absorbiert wird;
die chemische Energie hängt mit dem chemischen Zustand
zusammen;
die Masse ist auch eine Form von Energie;
usw...
Definition der Energie
4.
5.
6.
7.
Die Erhaltung der Gesamtenergie ist schwieriger auszudrücken, als
die des Impulses, weil die Energie in verschiedenen Formen vorkommen kann. Man muss alle möglichen Formen betrachten, d.h.
EStrahlung + EChem. + usw...
EGesamt = EMasse + Ekin + E pot + EWärme +
= Konst.
Oft sagen wir, dass die Energie eines Teilchens nicht erhalten wird.
Wenn z.B. ein Körper durch Reibung gebremst wird, wird ein Energieaustauch mit der Oberfläche stattfinden.
Der Begriff der Energie ist nützlich wegen des Prinzips der Energieerhaltung. Es sagt,
Bei allen Vorgängen muss die Gesamtenergie eines Systems
und seiner Umgebung erhalten werden.
Die Gesamtenergie wird erhalten, aber wir können die Energie, die
durch die Reibung den Zustand der Oberfläche ändert, nicht ausdrücken, und wir werden deshalb sagen, dass die Energie des Körpers, z.B. definiert als,
Physik
119
Andererseits, wenn wir wissen, dass der Austauch nur zwischen
bestimmten Formen der Energie stattfindet, können wir die Teile der
Gesamtenergie, die konstant bleiben, ignorieren.
nicht erhalten ist. In diesem Fall haben wir nur die kinetische und die
potentielle Energie betrachtet, und wenn es z.B Reibung gibt, wird sie
nicht erhalten.
E = Ekin + E pot ≠ Konst.
Wenn die Energie eines Systems sich ändert, muss die Energie der
Umgebung sich mit demselben Betrag aber entgegengesetzem Vorzeichen ändern, so dass die Summe sich nicht ändert. Man spricht
von Energieaustauch zwischen dem System und seiner Umgebung.
die kinetische Energie hängt mit der Bewegung des Teilchens
zusammen;
die potentielle Energie entspricht der Energie, die mit der
räumlichen Anordnung der Körper eines Systems zueinander
zusammenhängt;
die Wärmeenergie ist mit der Temperatur des Systems verknüpft;
Die Gesamtenergie ist die Summe von verschiedenen Teilen, die verschiedenen Formen der Energie entsprechen. Zum Beispiel,
1.
2.
3.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
120
Die relativistichen Gr ssen
Im Bereich der klassischen Mechanik gibt es kein Problem mit diesen
unendlichen Geschwindigkeiten.
Energie
3.2 Die relativistichen Grössen
Experimentell beobachten wir aber etwas anderes:
entspricht
der
299’792’458 Meter pro Sekunde
höchsten
Die Lichtgeschwindigkeit c wirkt als eine Grenzgeschwindigkeit, mit
dem Wert
Die Lichtgeschwindigkeit c
Geschwindigkeit in der Natur.
Kein Teilchen mit Masse kann eine Geschwindigkeit gleich
der Lichtgeschwindigket c erreichen, unabhängig davon
wieviel und wie lange es beschleunigt wird.
Ein Teilchen der Masse m kann sich nie mit einer Geschwindigkeit grösser als die Lichtgeschwindigkeit c bewegen.
3.2.1 Die Lichtgeschwindigkeit als
Grenzgeschwindigkeit
Bei der Definition der Masse haben wir gesehen, dass in
Rückstossversuchen das Verhältnis der Geschwindigkeiten der
Wagen eine konstante Zahl war, unabhängig von der Feder.
Wir haben dieses Ergebnis als
m A vB
=
mB v A
ausgedrückt, wobei mA und mB die Massen der Wagen sind.
oder ungefähr
c ≈ 3 × 108 m / s
Wir fragen jetzt, was würde in einem solchen Rückstossexperiment
geschehen, wenn wir eine der Masse kleiner und kleiner machen?
Je kleiner die Masse, z.B. mB, ist, desto schneller wird sie sich nach
dem Rückstoss bewegen.
Dass die Geschwindigkeit eines Teilchens immer kleiner als die
Lichtgeschwindigkeit sein muss, können wir schreiben als
Physik
121
Die Lichtgeschwindigkeit ist sehr gross im Vergleich zu unseren Alltagserfahrungen und deshalb ist es schwierig, die Existenz einer solchen Grenzgeschwindigkeit in der Natur zu beweisen.
wobei v die Geschwindigkeit des Teilchens ist.
v/c <1
Wenn mB nach null geht, wird ihre Rückstossgeschwindigkeit unendlich.
Eine ähnliche Situation beobachten wir, wenn eine Kraft auf ein Teilchen wirkt und damit das Teilchen beschleunigt.
⇒ v→∞
Solange die Kraft wirkt, wird das Teilchen beschleunigt und dadurch
kann es eine beliebige Geschwindigkeit erreichen.
r
r
F = Konst ⇒ a = Konst
⇒ wenn t → ∞
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
122
Energie
Siehe Tabelle 1.
TABLE 1. Geschwindigkeit
0,000000093
v/c
0,0000068
Was
Schnellstes Flugzeug (Mach 6.72)
0,063
0,000099
Wagen 100 km pro Stunde
Erdbewegung um die Sonne
0,94
0,13
Elektron beschleunigt durch 1000 Volt
Um die Erde in 1 Sekunde
0,99999988
Elektron beschleunigt durch 1 Million Volt
Elektron beschleunigt durch 1 Milliarde Volt
Eine solche Grenze wurde bewiesen mit Elementarteilchen, die sich
z.B. in kosmischen Strahlen befinden und sich mit sehr hoher
Geschwindigkeit bewegen. Man hat auch Elektronen mit grossen
elektrischen Spannungen beschleunigt und damit direkt bewiesen,
dass die Masse des Elektrons mit der Geschwindigkeit zunimmt.
In der Praxis kann man oft vergessen, dass es in der Natur eine
höchste Geschwindigkeit gibt, aber dies hat unsere theoretischen
Konzepte verändert.
3.2.2 Die relativistische Masse
für hohe Geschwindigkeiten
Eine Folgerung aus der Existenz einer Grenzgeschiwindigkeit ist,
dass für hohe Geschwindigkeiten das Verhältnis, das wir im
Rückstossexperiment gefunden haben, nicht mehr gelten wird!
m A vB
≠
mB v A
Das Verhältnis gilt nur wenn die Geschwindigkeiten der Körper relativ zur Lichtgeschwindigkeit klein sind.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die relativistichen Gr ssen
gilt nur wenn vA / c << 1, und vB / c << 1
Wir drücken dieses Ergebnis aus als
m A vB
=
mB v A
Wir haben von der Gleichung mA/mB = vB/vA gesprochen, als wir das
Impulserhaltungsgesetzt eingeführt haben.
Müssen wir aus der Beobachtung, dass die Gleichung nicht mehr gilt,
wenn die Geschwindigkeiten der Teilchen hoch sind, schliessen, dass
das Impulserhaltungsgesetz auch nicht mehr gilt, wenn die Impulse
der Teilchen sehr gross sind?
Wir retten das Impulserhaltungsgesetz mit einer neuen Definition der
Masse der Teilchen.
Wir sagen, dass die Masse eines Teilchens sich mit seiner Geschwindigkeit ändert.
1 − v2 / c2
m0
Zuerst hat Einstein am Anfang des 20. Jahrhunderts eine solche
Beziehung zwischen Masse und Geschwindigkeit geschrieben
m=
wobei m0 die Ruhemasse des Teilchens ist.
123
Die Ruhemasse m0 ist die Masse des Teilchens, wenn es sich in Ruhe
befindet.
Physik
124
Die relativistichen Gr ssen
m = γm0
Energie
.
Faktoren
1000 km/Stunde
0
0.87
0.995
1— 4
×10−13
1
unendlich
9
1.15
1.005
1+4×10−13
1
2
2
γ = (1 – v ⁄ c )
c/10
1/9
2
c/2
0
1–v ⁄c
0.994c
Physik
1
– --2
125
Natürlich, solange die Geschwindigkeit des Teilchens ist klein relativ
zur Lichtgeschwindigkeit, wird der Lorentz Faktor γ ≈ 1 und dann
gilt die “klassische” Definition des Impulses.
Man spricht vom relativistischen Impuls:
r
r
r
p = mv = γm0 v
Mit der neuen Definition der Masse wird das Impulserhaltungsgesetz
immer gelten.
3.2.3 Der relativistische Impuls
Der Lorentz Faktor ist sehr nützlich. Wir werden ihn oft benutzen,
wenn wir die Theorie der Relativität studieren.
c
v
TABLE 2. Lorentz
ist. Siehe Tabelle 2
so, dass die Masse eines Teilchens gleich
⇒ v ≈ 0.87c
2
2 2
Wir bemerken, dass 1 ⁄ 1 – v ⁄ c immer grösser als eins ist.
Die Masse eines Teilchens wird deshalb immer mit der Geschwindigkeit zunehmen.
Aus der Beziehung zwischen Masse und Energie folgt, dass es bei der
Beschleunigung eines Teilchens, eine Erhöhung seiner Geschwindigkeit und eine Zunahme seiner Masse gibt!
Beispiel 1. Ein Auto bewegt sich mit einer Geschwindigkeit
von 110 Km pro Stunde. Wieviel hat seine Masse zugenommen?
v / c ≈ ( 30 m / s) / ( 3 × 10 8 m / s) ≈ 10 −7
⇒ m / m0 ≈ 1 + 5 × 10 −15 ≈ 1, 000000000000005
⇒
1
1− v2 / c2 =
2
Beispiel 2. Mit welcher Geschwindigkeit muss ein Gegenstand sich bewegen, um seine Masse zu verdoppeln?
m /m = 2
0
Wir bemerken, dass die Änderung der Masse praktisch unmessbar ist,
solange die Geschwindigkeit des Teilchens viel kleiner als die Lichtgeschwindigkeit ist.
1
Wir definieren den Lorentz Faktor γ
γ =
1 − v2 / c2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
126
Energie
Wenn die Sonne wie eine Kugel aus Kohle brennem würde, würde sie
nur ungefähr 5000 Jahre lang leben.
Die Masse-Energie quivalenz
Wasserstoffkern
(anfänglich in Ruhe)
P
FIGURE 2. Die Sonne. Wir wissen, dass die Sonne mit derselben Rate
während ungefähr 5 Milliarden Jahre gebrannt hat.
D.h., der klassische Impuls ist eine Näherung des Impulses eines
Teilchens, der gilt, wenn die Geschwindigkeit des Teilchens viel kleiner als die Lichtgeschwindigkeit ist.
P
P
FIGURE 1. Relativistische Impulserhaltung in Kernvorgängen: hier der
Stoss eines Protons mit einem Wasserstoffkern. Nach dem Stoss werden
zwei Protonen gemessen.
Dass die Erhaltung der relativistischen Impulse gilt, hat man z.B. mit
der Messung von Kernvorgängen bewiesen.
Wir betrachten z.B. den Stoss zwischen einem Proton und einem
Wasserstoffkern. Siehe Abb. 1. Anfänglich ist der Kern in Ruhe und
das Proton bewegt sich, es hat einen Impuls. Man kann beweisen,
dass die Summe der Anfangsimpulse gleich der Summe der Endimpulse ist. Der Gesamtimpuls ist in einem solchen Stoss erhalten.
Wir wissen jedoch, dass die Sonne mit derselben Rate während ungefähr 5 Milliarden Jahre gebrannt hat, und sie soll noch während 5
Milliarden Jahren brennen.
Zuerst hat Einstein 1905 erklärt, wie die Sonne eine solche Menge
von Strahlungsenergie ausstossen kann, mit seiner berühmten Beziehung zwischen Masse und Energie: die Masse-Energie Äquivalenz
Gleichung,
3.3 Die Masse-Energie Äquivalenz
Auf die Erde kommt von der Sonne die grösste Menge von nützlicher
Energie, meistens in Form von Strahlungsenergie (Licht).
E = mc 2
Physik
127
wobei E die Energie, m die Masse und c die Lichtgeschwindigkeit ist.
Die Sonne stösst eine enorme Menge von Strahlungsenergie aus.
Siehe Abb. 2.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
128
Energie
Diese Gleichung drückt aus, dass Masse eine Form von Energie ist.
Die MKS Einheit der Energie ist Joule (J)
m2
kg.m
1 J = 1 kg 2 = 1 2 .m = 1 N .m
s
s
Eine 100 Watt Glühbirne braucht 100 Joule pro Sekunde.
Wenn wir eine Masse von 1 Kilogramm ganz in Energie umwandeln
könnten, folgt aus der Masse-Energie Beziehung, dass die gewonnene
Energie
E = mc 2 ≈ (1 Kg)(3 × 108 m / s)2 = 9 × 1016 J
wäre. Masse enthält eine enorme Menge von Energie! Wenn 1 kg
ganz in Energie umgewandelt werden könnte, könnte damit eine
Stadt wie Zürich für ungefähr 50 Jahre beleuchtet werden.
3.4 Die kinetische Energie
Wir haben gesehen, dass die Masse eines Teilchens mit der
Geschwindigkeit zunimmt und sehr gross wird, wenn das Teilchen
sich der Lichtgeschwindigkeit nähert.
1 − v2 / c2
m0
Wenn wir die Gleichung für die Zunahme der Masse mit der
Geschwindigkeit
m=
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die kinetische Energie
mit der Beziehung zwischen Masse und Energie
E = mc 2
1− v2 / c2
m0c 2
= γm 0c 2
kombinieren, erhalten wir die Gesamtenergie des Teilchens
E = mc 2 =
Die Ruheenergie wird definiert als die Energie des Teilchens, wenn
es sich in Ruhe befindet. Sie ist gleich
E0 = m0 c 2
Wenn das Teilchen sich bewegt, erhält es zusätzliche Energie. Die
zusätzliche Energie, die ein Teilchen gewinnt, wenn es sich bewegt,
ist seine kinetische Energie, und ist gleich
E kin = E − E 0
= mc 2 − m0c 2
= (Gesamtenergie) − ( Ruheenergie)
Ekin = mc 2 − m0 c 2
= γm0 c 2 − m0 c 2
= (γ − 1)m0 c 2
129
Die kinetische Energie kann mit Hilfe des Lorentz Faktors geschrieben werden
Physik
130
Energie
3.4.1 Langsam bewegte Teilchen
(1 + α )β
≈ 1 + βα
(α << 1)
Für Teilchen, die sich langsam bewegen, benutzen wir die Näherung
woraus folgt
1 v2
1 − v2 / c2 ≈ 1 −
2 c2
1
1 v2
≈1+
2 c2
1 − v2 / c2
Die Gleichung kann für Geschwindigkeiten v<≈0,1c benutzt werden.
Siehe Tabelle 3.
0,7c
0,5c
0,3c
0.2c
0,1c
0,01c
v
7,1
2,30
1,41
1,148
1,048
1,0206
1,005037
1,00005003
2/c2)-1/2
γ=(1—v
1,49
1,40
1,25
1,125
1,045
1,0200
1,005000
1,000050000
1+v2/2c2
zwischen genauer und genäherter
0,9c
Gleichung
TABLE 3. Numerischer Vergleich
0,99c
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die kinetische Energie
In diesem Fall ist die Gesamtenergie des Teilchens gleich
1
= m0c 2
1− v2 / c2
genäherte Gleichung
genaue Gleichung
E = mc 2
v2
≈ m0c 2 1 + 2
2c
v2
≈ m0c 2 + m0c 2 2
2c
1
≈ m0c 2 + m0v 2
2
Diese Gleichung gilt für Teilchen, die sich mit einer Geschwindigkeit
kleiner als ≈0,1c bewegen.
Wir haben die Gleichung E=mc2 als Summe von zwei Teilen
geschrieben; der Teil der Ruhemasse und der kinetische Teil:
1
E = m0c 2 ( Ruheenergie) + m0v 2 ( kinetische Energie)
2
Solange die Geschwindigkeit eines Teilchens weniger als ≈0,1c ist, ist
seine kinetische Energie viel kleiner als seine Ruhemasseenergie.
131
Beispiel: Wir betrachten eine Gewehrkugel der Masse 10 g,
die sich mit einer Geschwindigkeit von 300 Meter pro
Sekunde bewegt. Bestimme ihre kinetische und Ruhemasseenergie.
Physik
132
Energie
Kinetische Energie:
Ekin
1
= m0 v 2
2
1
= × (0, 01kg) × (300 m / s)2
2
= 450 Joule
Die Energie ist hoch genug, so dass die Kugel eine Planke
durchdringt.
Ruhemasseenergie;
= (0, 01kg) × (3 × 108 m / s)2
E = m0 c 2
0
= 9 × 1014 Joule
Diese Energie ist gleich der freigelassenen Energie einer mittelgrossen Atombombe.
3.5 Potentielle Energie der Gravitation
Wir fahren nun weiter mit unserer Untersuchung der Teile der
Gesamtenergie.
Wir betrachten einen Ball, der von einer Höhe h frei fallen gelassen
wird. Siehe Abb. 3.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
m0
Potentielle Energie der Gravitation
Ruhe
h
1m v 2
2 0 2
Geschwindigkeit v1=0
kinetische Energie = 0
m0 kinetische Energie =
v2
FIGURE 3. Freier Fall eines Körpers. Wenn der Körper frei fällt, wird seine
kinetische Energie zunehmen. Die potentielle Energie, die im Körper
gespeichert wird, wenn er gehoben wird, wird sich in kinetische Energie
umwandeln.
Bevor der Körper losgelassen wird, ist er in Ruhe v1=0 und deshalb
besitzt er keine kinetische Energie.
Bevor er auf dem Boden landet, bewegt sich der Körper mit der
Geschwindigkeit v2 und besitzt die kinetische Energie (1/2)m0v22.
133
Deshalb suchen wir die zusätzliche Form der Energie, d.h. die potentielle Energie, die im Körper gespeichert wird, wenn er auf eine Höhe
h gehoben wird, und die sich in kinetische Energie umwandeln wird.
Physik
134
Energie
h=
1 2
gt
2
2
und
v2
1 v2
g = 2
2 g
2g
⇒
1 2
v2 = gh
2
v2 = gt
Mit den Gleichungen der gleichförmig beschleunigten Bewegung finden wir eine Beziehung zwischen der Höhe und der Geschwindigkeit
v2.
h=
Wenn wir diese Gleichung mit m0 multiplizieren, erhalten wir
1
m0 v22 = m0 gh
2
Am Anfang wird die Gesamtenergie des Körpers gleich
1
m0 v22
2
E1 = m0 c 2 + m0 gh
sein, und am Ende ist sie gleich
E2 = m0 c 2 +
Die Gesamtenergie E in einem bestimmen Punkt der Höhe h ist
gleich
kinetische
1
2
2
E= m
+
m
v
+
m0 gh
0c
{
12
3
2 0
123
potentielle
Ruhemasse
Aus der Energieerhaltung folgt dass E=E1=E2.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Arbeit
Beim freien Fall wird sich die potentielle Energie in kinetische Energie umwandeln. Die Ruhemasse ändert sich nicht und kann vernachlässigt werden.
Was passiert, wenn der Körper auf dem Boden landet? Die kinetische
Energie wird sich in andere Formen umwandeln, z.B. in Schallenergie, Wärmeenergie, Bodendeformationsenergie, usw...
3.6 Die Arbeit
3.6.1 Bewegung in einer Dimension
Im Beispiel des frei fallenden Balls haben wir bewiesen, dass die
potentielle Energie der Gravitation gleich
E pot (h) = mgh
ist, wobei m die Masse des Balls ist (wir nehmen an, dass die
Geschwindigkeit des Balls sehr viel kleiner als die Lichtgeschwindigkeit ist).
Das Ball fällt frei wegen der Gravitationskraft, die einen Betrag mg
besitzt.
( mg) × h = ( Kraft ) × (Verschiebung)
135
Wir bemerken, dass der Betrag der Abnahme der potentiellen Energie
und der, der Zunahme der kinetischen Energie, einander gleich sind,
mit einem Wert
Physik
136
Energie
Wir definieren die Arbeit, die eine Kraft an einem Körper leistet, als
das Produkt der Komponente der Kraft längs der Verschiebung und
der Verschiebung, d.h. das Skalarprodukt der Vektoren
r r r r
W = F ⋅ ∆r = F ∆r cosθ
wobei θ der Winkel zwischen dem Kraftvektor und dem Verschiebungsvektor ist.
∆x
mg
∆x
W=0
mg
∆x
v
Die Arbeit ist deshalb eine skalare Grösse. Sie nimmt einen positiven
Wert an, wenn die Kraft und die Verschiebung in dieselbe Richtung
zeigen, und einen negativen Wert, wenn sie entgegengestezte Richtungen haben. Siehe Abb. 4.
mg
W<0
Arbeit, die eine Kraft an einem Körper leistet.
W>0
FIGURE 4.
Die Einheit der Arbeit ist Joule (J) weil
kg.m
m2
1 N .m = 1 2 .m = 1 kg 2 = 1 J
s
s
Die Arbeit besitzt deshalb dieselbe Einheit wie die Energie.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Arbeit
3.6.2 Bewegung in mehreren Dimensionen
Wir betrachten z.B. den Fall einer Bewegung in mehreren Dimensionen.
Die Kraft wird als eine Funktion des Ortsvektors geschrieben, die den
Kraftvektor F am Punkt r darstellt:
r r r
F ≡ F(r )
y
r1
F(r)
x
F(r)
r2
F(r)
Ein Teilchen bewegt sich entlang einer Bahn im Raum. Siehe Abb. 5.
Die Arbeit wird berechnet entlang der Bahn und zwischen zwei Punkten 1 und 2.
ey
ex
FIGURE 5. Ein Teilchen bewegt sich entlang einer Bahn in zwei
Dimensionen, die zwei Punkte 1 und 2 verbindet. Die Kraft wird als eine
Funktion des Ortsvektors definiert. Die Arbeit wird berechnet entlang der
Bahn.
Die Bahn zwischen den zwei Punkten 1 und 2 wird in differentielle
137
Strecken dr unterteilt, entlang denen die Kraft als konstant betrachtet
Physik
138
Energie
werden kann. Die geleistete Arbeit dW entlang dieser differentiellen
Strecke ist gleich
r r
dW = F ⋅ dr
Die gesamte geleistete Arbeit W wird berechnet als das Linieninter
r
r
r
gral von F entlang die Bahn zwischen den Punkten 1 und 2
r
r1
2
2
r r r
W12 = ∫ dW = ∫ F(r ) ⋅ dr
r
r1
Arbeit der Gewichtskraft. Wir berechnen die Arbeit der Gewichtskraft mit Hilfe des Linienintegrals.
r r
rr
r
r
r
r
F ( r ) = − mg ey = mg
und
r = xex + yey
r
r
Die von der Gewichtskraft geleistete Arbeit ist gleich
r
r
r
r1
r2
r r r r2 r r
W12 = ∫ F ( r ) ⋅ dr = ∫ mg ⋅ dr =
r
r1
r
r1
r 2 r
r r r
r r
= mg ⋅ ∫ dr = mg ⋅ ( r2 − r1 ) = mg ⋅ ∆r =
(
)
rr
r
r
r
= − mg ey ⋅ ( ∆xex + ∆yey ) = − mg ∆y =
r
( g ≡ g > 0)
= − mg( y 2 − y1 )
Das Ergebnis hängt nur vom Unterschied y2-y1 zwischen den Höhen
der beiden Endpunkte ab.
( g > 0)
Für den Fall des frei fallenden Balls, erhalten wir mit y2=0, y1=h,
W12 = − mg(0 − h) = mgh
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Arbeit-Energie Theorem
Die geleistete Arbeit hat einen positiven Wert, weil die nach unten
gerichtete Gewichtskraft und die Verschiebung von y=h bis y=0 in
derselben Richtung zeigen.
Wenn der Ball vom Boden auf die Höhe h hochgezogen wird (d.h.
y2=h, y1=0), hat die geleistete Arbeit einen negativen Wert, weil in
diesem Fall die Gewichtskraft entgegengesetzt der Bewegung ist (d.h.
man muss ziehen, um den Ball hochzuheben.)
Fx = − kx
Arbeit der Federkraft. Wir betrachten die von der Federkraft geleistete Arbeit. Es gilt für kleine Verschiebungen (Hookesches Gesetz)
x
x
wobei der Ursprung der x-Achse die Gleichgewichtslage ist. Die
geleistete Arbeit zwischen der (eindimensionalen) Verschiebungen x1
und ist gleich
x2
2
2
1
W12 = ∫ F( x )dx = − k ∫ xdx = − k ( x22 − x12 )
2
x1
x1
3.7 Das Arbeit-Energie Theorem
Wir beginnen mit Newtons zweitem Gesetz in der vektoriellen Form
r
r r
r
r r
F = ma
⇒ F ⋅ dr = ma ⋅ dr
r
r
r
r2
r2
r2 r
r
r
r
r
dv r
⇒ ∫ F ⋅ dr = m ∫ a ⋅ dr = m ∫
⋅ dr
r
r
r dt
r1
r1
r1
139
Wenn wir eine dreidimensionale Bewegung betrachten, erhalten wir
Physik
140
Energie
r
r
r2 r
r2
dv
r
dv
dv
dv
⋅ dr = m ∫ x dx + y dy + z dz
r dt
dt
dt
dt
r1
r
r1
m∫
y2
z2
x 2 dv
dv
dv
= m ∫ x dx + ∫ y dy + ∫ z dz
dt
dt
x1 dt
y1
z1
x
v x1
vx
v x1
vx
∫
2
2
2
dv
dx
1
x
dx = ∫
dvx = ∫ vx dvx = (vx22 − vx21 )
dt
dt
2
x1
Nun bemerken wir, dass gilt
und deshalb
)
1
m vx22 + vy22 + vz22 − vx21 − vy21 − vz21
42
44
3 14
42
44
3
2 14
r
r
− v12
v 22
(
=
1 r2 1 r2
mv2 − mv1
2
2
r
r2 r
r
1
dv
⋅ dr = m vx22 − vx21 + vy22 − vy21 + vz22 − vz21
2
dt
r
r1
m∫
=
r
Die Arbeit, die an einem Körper geleistet wird, ist gleich der Änderung seiner kinetischen Energie.
r2
r
r
r
1
1 r
W12 = ∫ F ⋅ dr = mv22 − mv12
r
2
2
r1
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Allgemeine potentielle Energie
r
r
r1
r
(
)
r
r1
r
r
r1
r
Im Fall, dass viele Kräfte auf das Teilchen wirken, ist die Änderung
der kinetischen Energie gleich der gesamten Arbeit, die von allen
Kräften geleistete wird
r
r1
r2
r
r
r r r2 r r
r 2 r r 2 r r
W = ∫ F ⋅ dr = ∫ F1 + F2 + ... ⋅ dr = ∫ F1 ⋅ dr + ∫ F2 ⋅ dr + ...
3.8 Allgemeine potentielle Energie
3.8.1 Konservative und nicht-konservative Kräfte
Wir haben zwei bestimmte Beispiele der geleisteten Arbeit berechnet:
(1) die Arbeit der Gravitationskraft, (2) die Arbeit der Federkraft:
W12 = − mg( h2 − h1 )
1
W12 = − k ( x22 − x12 )
2
In beiden Fällen hängt das Ergebnis nur von Anfangs- und Endpunkt
der Bahn ab, d.h. die Arbeit ist unabhängig vom zurückgelegten Weg.
Wenn ein Ball vom Boden auf die Höhe h hochgezogen wird, hat die
von der Gravitationskraft geleistete Arbeit einen negativen Wert, weil
die Gewichtskraft entgegengesetzt der Bewegung ist. Man muss ziehen, um den Ball hochzuheben.
141
Wir sagen, dass die von der Gravitationskraft geleistete Arbeit im
Körper als potentielle Energie der Gravitation gespeichert wird. Da
die Arbeit einen negativen Wert hat, wenn wir den Körper nach oben
Physik
142
Energie
⇒ E pot ( h ) = mgh
ziehen, definieren wir die Änderung der potentiellen Energie mit
einem negativen Vorzeichen
W = − ∆E pot = − mg( h − 0) = − mgh
⇒
⇒
1
W12 = −( E pot ( x 2 ) − E pot ( x1 )) = − k ( x 22 − x12 )
2
W12 = −( E pot ( h2 ) − E pot ( h1 )) = − mg( h2 − h1 )
Die gespeicherte potentielle Energie wird in kinetische Energie
umgewandelt, wenn der Körper frei nach unten fällt.
Beispiele:
Gravitationskraft:
E pot ( h ) = mgh
1 2
kx
2
Federkraft:
E pot ( x ) =
In beiden Beispielen, die wir betrachtet haben, ist die von der Kraft
geleistete Arbeit vom zurückgelegten Weg unabhängig.
Deshalb können wir die potentielle Energie als eine Funktion von
Anfangs- und Endpunkt des Wegs definieren.
Es folgt aus der Definition der potentiellen Energie und ihrer Beziehung zur Arbeit, dass die geleistete Arbeit entlang einem geschlossenen Weg gleich null ist.
Wenn wir einen Ball vom Boden auf die Höhe h hochziehen und ihn
nachher wieder auf den Boden bringen, ist die geleistete Arbeit gleich
null.
Wir unterteilen alle Kräfte der Natur in zwei Gruppen:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Allgemeine potentielle Energie
1) konservative Kräfte, wie die Gravitationskraft oder die Federkraft. Für diese Art von Kräften können wir eine potentielle Energie
definieren. Die geleistete Arbeit entlang einem geschlossenen Weg ist
gleich null.
2) nicht-konservative Kräfte, wie die Reibungskräfte. In diesem
Fall kann keine potentielle Energie definiert werden. Wir bemerken,
dass die von einer Reibungskraft geleistete Arbeit vom Weg abhängt.
Je weiter wir einen Körper bewegen, der eine Reibungskraft spürt,
desto mehr Arbeit wird geleistet. Wenn wir den Körper an den
Anfangspunkt zurückbringen, ist die geleistete Arbeit nicht gleich
null.
3.8.2 Mechanische Energie
r
Ges
r 1 r
1 r
⋅ dr = mv22 − mv12 = ∆Ekin
2
2
Aus dem Arbeit-Energie Theorem folgt
r
r2
r
r1
∫F
r
konservative
r
⋅ dr = − ∆E pot
Die Gesamtarbeit der konservativen Kräfte kann mit Hilfe einer
potentiellen Energie berechnet werden
r
r2
r
r1
∫F
Emech = Ekin + E pot
143
Die Summe der kinetischen Energie und der potentiellen Energie
eines Systems wird als mechanische Gesamtenergie Emech bezeichnet:
Physik
144
Energie
3.8.3 Beziehung zwischen Kraft und potentieller
Energie
Allgemeine potentielle Energie
r
+F
) ⋅ drr = ∆E
Physik
Fx = −
dE pot
dx
r
r
)
145
Die Kraft ist somit die negative Ableitung der potentiellen Energie
nach dem Ort x:
erhalten wir
r r
r
r
r
r
dE pot = − Fx ex ⋅ dr = − Fx ex ⋅ ( dxex + dyey + dzez ) = − Fx dx
Wenn die Kraft in der x-Richtung wirkt, d.h.,
r
r
F = Fx ex
Für eine infinitesimale Verschiebungen dr folgt daraus
r r
dE pot = − F ⋅ dr
r
r1
2
r r
r
r
∆E pot = E pot ( r2 ) − E pot ( r1 ) = −W12 = − ∫ F ⋅ dr
Aus der Definition der potentiellen Energie folgt
Es ist klar, dass die Funktion Epot vom Ort abhängt.
(
Allgemein können wir die geleistete Arbeit zwischen zwei Punkten 1
und 2 schreiben, als die Differenz der potentiellen Energie, gemessen
an den Punkten 1 und 2
r
r
W12 = − ∆E pot = − E pot ( r2 ) − E pot ( r1 )
Falls nur konservative Kräfte wirken, d.h.
r
r
FGes = Fkonservativ
erhalten wir
∆E kin = − ∆E pot
⇒ ∆( E kin + E pot ) = 0
E mech = E kin + E pot = konst.
r
nk
kin
d.h. die mechanische Energie wird erhalten, wenn nur konservative
Kräfte wirken.
r
r2
r
r
r
r1
r 2 r
r
⋅ dr + ∫ Fnk ⋅ dr = ∆Ekin
konservative
∫ (F
r
r1
konservative
r
Wenn nicht-konservative Kräfte wirken gilt
r
r2
r
r1
∫F
− ∆E pot + Wnk = ∆Ekin
und man kann die Veränderung der mechanischen Energie berechnen
Wnk = ∆Ekin + ∆E pot = ∆( Ekin + E pot ) = ∆E
Die Änderung der mechanischen Energie ist gleich der Arbeit, die
von nicht-konservativen Kräften geleistet wird.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
146
Energie
Wir finden z.B. für die Federkraft
dE
d 1
pot
F =−
= − kx 2 = − kx
dx
dx 2
x
Allgemeine potentielle Energie
r
r
Die Gradientenoperation ist die Umkehrung des Linienintegrals
r
r1
2
r r
r
r
E pot ( r2 ) − E pot ( r1 ) = − ∫ F ⋅ dr
3.8.4 Allgemeine potentielle Energie der
Gravitationskraft
Als wir die potentielle Energie der Gravitationskraft berechnet haben,
haben wir benutzt, dass die Gewichtskraft konstant und gleich mg ist.
Wenn die Kraft in einer beliebigen Richtung zeigt, d.h.,
r
r
r
r
F = Fx ex + Fy ey + Fzez
müssen wir den sogenannten Gradienten benutzen, der die Ableitung der potentiellen Energie nach den drei Raumkoordinaten ist
Wir wissen, dass dies nur in der Nähe der Erde gilt. Allgemein ist die
Gravitationskraft gleich
Physik
r
r
r
r
r = xex + yey + zez
147
ist. Der Ortsvektor kann mit Hilfe seiner Komponenten ausgedrückt
werden
r
GMm
GMm
E pot (r ) = − r = −
r
r
Wir wollen nun beweisen, dass die allgemeine potentielle Energie,
die der Gravitationskraft entspricht, gleich
wobei M die Masse der Erde, und r der Abstandsvektor zwischen der
Lage der Masse m und dem Erdzentrum ist.
r
r
GMm r
F=− 2
r r
r
r
∂E pot r ∂E pot r ∂E pot r
F = −
e +
e +
e ≡ −∇E pot
∂x x
∂y y
∂z z
wobei wir den Nabla-Operator für die partiellen Ableitungen der
potentiellen Energie eingeführt haben.
Die partielle Ableitung einer Funktion, die von mehreren Variablen
abhängt, ist die Ableitung nach einer Variablen, wenn die anderen
konstant bleiben.
z.B.
f ( x, y ) = x 2 y 3
∂f df ( x, y = konst.)
d( x 2 )
=
= y3
= 2 xy 3
⇒
∂x
dx
dx
und
∂f df ( x = konst., y )
d( y 3 )
=
= x2
= 3x 2 y 2
∂y
dy
dy
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
148
Energie
r
r
∂
∂
∂
E
E
E
pot r
pot r
pot r
F = −
e +
e +
e ≡ −∇E pot
∂x x
∂y y
∂z z
Wir müssen beweisen, dass gilt
d.h.,
r ? r GMm
r 1
F =− ∇ −
= GMm∇
r
r
r 1 ∂ 1 r
∂ 1r ∂ 1r
e +
e +
e
∇ =
r ∂x r x ∂y r y ∂z r z
)
Um den Gradienten zu bestimmen, berechnen wir jede Komponente
Wir erhalten
(
∂ 1
z
=− 3
∂z r
r
−1 / 2
∂ 1 ∂
∂
1
=
( x 2 + y2 + z 2 ) =
1/ 2 =
∂x r ∂x ( x 2 + y 2 + z 2 )
∂x
−3 / 2
1
= − ( x 2 + y 2 + z 2 ) (2 x )
2
x
r3
=−
und
und eine ähnliche Herleitung gibt
∂ 1
y
=− 3
∂y r
r
(
)
und deshalb haben wir bewiesen, dass gilt
r
r
r
r
r
r
r
1
1
1 r
∇ = − 3 xex + yey + zez = − 3 = − 2
r
r
r r
r
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Allgemeine potentielle Energie
r
r
r
1
GMm
r
F = GMm∇ = − 2
r
r r
149
Wenn wir diese Beziehung benutzen, um die Kraft zu berechnen, finden wir
Physik
150
Energie
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 4
Schwingungen und
Resonanz
Schwingungen sind Vorgänge, bei denen sich eine physikalische
Grösse in Abhängigkeit von der Zeit periodisch ändert.
Bei einer Schwingung bewegt sich z.B. ein Teilchen in einer periodischen Bewegung immer nur auf demselben Weg hin und her.
4.1 Harmonische Schwingungen
4.1.1 Sinus- und Kosinusförmige Bewegung
Versuchsexperiment. Pendel bewegt sich sinusförmig
151
Wir betrachten ein Pendel. Eine Masse wird an einem Faden aufgehängt.
Physik
152
Schwingungen und Resonanz
Solche Bewegungen werden harmonische Schwingungen genannt.
Harmonische Schwingungen
1
π
2
y = sin(θ ) = sin(ωt)
π/2 Kreis
θ
0
2π
5π
2
3π
Es gilt
d
sin(ωt) = ω cos(ωt)
dt
d
cos(ωt) = −ω sin(ωt)
dt
dx ( t)
= Aω cos(ωt + φ )
dt
v ( t = 0) = Aω cos(φ ) = v 0
Zur Zeit t=0 ist die Geschwindigkeit
Physik
153
Bei maximaler Auslenkung ist die Geschwindigkeit null. Die
Geschwindigkeit wird maximal, wenn die Masse durch die Gleichgewichtslage x=0 geht.
v ( t) =
und die erste zeitliche Ableitung, die die Geschwindigkeit liefert, ist
gleich
und
wobei x0 der Anfangswert der Auslenkung ist.
x ( t = 0) = A sin(φ ) ≡ x 0
Zur Zeit t=0 ist die Auslenkung x(t) gleich
Die Amplitude A und die Phasenkonstante φ sind durch die Anfangsbedingungen festgelegt:
Weil die Sinusfunktion nur Werte zwischen –1 und 1 annehmen kann,
ist die grösste Auslenkung aus der Gleichgewichtslage gleich der
Amplitude A, d.h. die Amplitude ist der Betrag der maximalen Auslenkung.
Wenn wir die Masse aus seiner Gleichgewichtslage auslenken und
sie loslassen, schwingt sie um die Gleichgewichtslage.
Wie soll eine solche Bewegungskurve beschrieben werden?
Wir beobacthen experimentell, dass für kleine Auslenkungen die Pendelbewegung gleich der Projektion einer Kreisbewegung ist.
y
0
–1
3π
2
Siehe Abb. 1. Der Punkt läuft mit konstanter Geschwindigkeit auf
dem Kreis um. Die Projektion des umlaufenden Punktes auf die yAchse wird dargestellt als
π
ωt
3π/2
Figur 1. Die Pendelbewegung ist gleich der Projektion einer Kreisbewegung.
Ein Punkt bewegt sich mit konstanter Geschwindigkeit auf dem Kreis.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
wobei A die Amplitude, ω die Kreisfrequenz, und φ die Phasenkonstante ist.
x ( t) = A sin(ωt + φ )
Daraus schliessen wir, dass die Bewegung, der am Pendel aufgehängten Masse um ihre Gleichgewichtslage, einen sinusförmigen Verlauf
hat, der gegeben ist durch
Lichtquelle
154
Schwingungen und Resonanz
wobei v0 die Anfangsgeschwindigkeit ist. Mit Hilfe der Anfangsauslenkung und der Anfangsgeschwindigkeit werden die Konstanten A
und φ festgelegt.
z.B. für v0=0,
π
x (0) = A sin(φ ) = x 0
φ =
⇒
2
v (0) = Aω cos(φ ) = 0
A = x 0
π
⇒ x ( t) = x sin(ωt + ) = x 0 cos(ωt)
2
0
Harmonische Schwingungen
oder
und so
2π
ω
ωT = 2π
T=
1 ω
=
T 2π
Die Frequenz ν ist die Anzahl der Schwingungen pro Sekunde
ν=
4.1.2 Horizontale Bewegung mit Federkraft (Federpendel)
Die MKS-Einheit der Frequenz: Hertz (Hz) = 1/Sekunde
sin(α + β ) = sin α cos β + cosα sin β
Physik
155
wobei k die Federkonstante und x0 die Länge der entspannten Feder
ist (Siehe Kapitel 2). Wir setzen x0=0, d.h. der Ursprung der x-Achse
wird als die Gleichgewichtslage der Feder genommen.
F = − k( x − x0 )
Für eine Verschiebung x aus der Gleichgewichtslage, gibt es eine
Rückstellkraft, die nach dem Hookeschen Gesetz für kleine Verschiebung x proportional zu x ist:
Wir betrachten nun die reibungsfreie Bewegung einer Masse, die mit
einer Feder verbunden ist. Wir nennen eine solche Anordnung ein
Federpendel. Siehe Abb. 2.
Uns interessiert die eindimensionale Bewegung der Masse um ihre
Gleichgewichtslage.
Bemerkung. Harmonische Bewegungen können auch als Summe
von Kosinus- und Sinusfunktionen ausgedrückt werden. Aus der
Gleichung
folgt
x ( t) = A sin(ωt + φ )
= A sin ωt cosφ + A cosωt sin φ
= B sin ωt + C cosωt
wobei B, C Konstanten sind.
Die Periode T der Schwingung ist definiert als die Zeit, die die Masse
benötigt, um eine vollständige Schwingung durchzuführen. Bei
einem vollständigen Zyklus erhöht sich die Phase der Sinusfunktion
um 2π. Zur Zeit t+T unterscheidet sich die Phase um 2π von der
Phase zur Zeit t:
ω ( t + T ) + φ = 2π + ωt + φ
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
156
Schwingungen und Resonanz
x
F
x
F (Rückstellkraft)
–kx
F = –kx
x
Verschiebung
Figur 2. Horizontales Federpendel. Die Feder versucht die Masse in ihre
ursprüngliche Lage zurückzubringen.
Wenn x=0 ist, sitzt die Masse in ihrer Gleichgewichtslage, und der
Betrag der Federkraft ist gleich null.
Wenn x verschieden von null ist, versucht die Federkraft die Masse in
ihre Gleichgewichtslage zurückzubringen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Harmonische Schwingungen
4.1.3 Vertikale Bewegung mit Federkraft und aufgehängter
Masse
x=xG+∆x
Im Fall, dass das Federpendel in vertikaler Richtung aufgehängt ist,
wirken zwei Kräfte auf die Masse: die Federkraft und die Gravitationskraft.
Siehe Abb. 3.
F
F = − k ( x − x 0 ) + mg
Die Gesamtkraft, die auf die Masse wirkt, ist
x0
xG
Vertikales Federpendel.
Gleichgewichtslage
Figur 3.
157
Wenn wir die Masse an die Feder hängen, wird sich die Feder wegen
der Gravitationskraft, die nach unten gerichtet ist, verlängern.
Physik
158
Schwingungen und Resonanz
Harmonische Schwingungen
mg
k
Die Beschleunigung ist
xG = x 0 +
d.h.
a=
d2x
dt 2
d2x k
+ x=0
dt 2 m
dv d 2 x
=
dt dt 2
⇒
dx ( t)
= Aω cos(ωt + φ )
dt
Durch die Ableitung nach der Zeit erhalten wir
Physik
159
wobei A die Amplitude, ω die Kreisfrequenz, und φ die Phasenkonstante ist.
x ( t) = A sin(ωt + φ )
Eine solche Bedingung erfüllen die Sinus- und Kosinusfunktionen.
Wir schreiben den Ansatz
2
m d x ( t)
x ( t) = −
k dt 2
Diese Funktion x(t) ist bis auf den Faktor –(m/k) gleich ihrer zweiten
Ableitung:
Gesucht wird die Funktion x(t), die die Gleichung erfüllt.
Diese Bewegungsgleichung wird eine Differentialgleichung
genannt. Sie stellt eine Beziehung zwischen der Funktion x(t) und
ihrer zweiten Ableitung dar.
− kx = m
Wir berechnen die Gleichgewichtslage xG als die Verschiebung, in
welcher die Gesamtkraft gleich null ist:
F ( xG ) = 0 = − k ( xG − x 0 ) + mg ⇒
∆x = x − xG
Nun sind wir an der Verschiebung der Masse relativ zur Gleichgewichtslage interessiert:
Die Gesamtkraft ist
F = − k ( ∆x + xG − x 0 ) + mg
mg
− x 0 ) + mg
k
= − k ( ∆x + x 0 +
= − k∆x
Wir schliessen daraus, dass die Rückstellkraft im Fall einer vertikal
aufgehängten Masse auch proportional zur Verschiebung, gemessen
relativ zur Gleichgewichtslage, ist.
4.1.4 Differentialgleichung der harmonischen Bewegung
Mit Hilfe der Lösung einer Differentialgleichung werden wir die
Kreisfrequenz der Schwingung als Funktion der physikalischen Grössen der schwingenden Anordnung bestimmen.
Wir benutzen Newtons zweites Gesetz für den Fall, dass die Kraft
proportional zur Verschiebung x ist, wobei der Ursprung der x-Ache
(x=0) die Gleichgewichtslage der Masse ist:
F = − kx = ma
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
160
Schwingungen und Resonanz
und
d 2 x ( t)
= − Aω 2 sin(ωt + φ ) = −ω 2 x ( t)
dt 2
k
A sin(ωt + φ ) = 0
m
d2x k
+ x=0
dt 2 m
Wir setzen die Lösung x(t) in die Differentialgleichung ein
und finden
− Aω 2 sin(ωt + φ ) +
⇒
ω=
m
k
und T = 2π
k
m
Wir beobachten, dass die Zeitabhängigkeit verschwindet, wenn wir
die Sinusfunktionen weglassen, und dass die Amplitude auch weggelassen werden kann. Es bleibt
k
−ω 2 + = 0
m
D.h. die Kreisfrequenz ω ist durch die Federkonstante k und die
Masse m festgelegt.
Wir bemerken, dass
1.
2.
3.
die Kreisfrequenz von der Federkonstante und der inversen Masse
abhängt;
die Kreisfrequenz unabhängig ist von der Amplitude A der
Schwingung;
sobald die Masse erst einmal harmonisch schwingt, sie diese
Schwingung mit gleicher Amplitude, Kreisfrequenz und Phasenkonstante weiterführt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Harmonische Schwingungen
4.1.5 Das Fadenpendel
Wir betrachten ein idealisiertes Fadenpendel. Es besteht aus einer
punktförmigen Masse, die an einem masselossen Faden hängt. Wir
betrachten keine Reibung.
s = lθ
Wenn das Pendel ausgelenkt und losgelassen wird, schwingt es unter
der Wirkung der Gravitationskraft in einer vertikalen Ebene.
Die Auslenkung s ist gleich
wobei l die Länge des Fadens ist.
Wir zerlegen die Gewichtskraft in eine tangentiale Komponente
mgsinθ und eine radiale Komponente mgcosθ.
Ftangential = − mg sin θ
Die tangentiale Komponente ist eine rücktreibende Kraft, und wir
schreiben deshalb
Siehe Abb. 4.
v tangential = l
dθ
dt
und
atangential = l
d 2θ
dt 2
161
Die Geschwindigkeit und die Beschleunigung können auch zerlegt
werden. Für die tangentiale Geschwindigkeit und Beschleunigung
gilt
Physik
162
Fadenpendel.
Schwingungen und Resonanz
Figur 4.
θ
l
mg sinθ
s
Aus dem zweiten Newtonschen Gesetz folgt
Ftangential = matangential
d 2θ
− mg sin θ = ml 2
dt
s=lθ
m
mg
und schliesslich finden wir die Differentialgleichung für die Bewegung des einfachen Fadenpendels
d 2θ g
+ sin θ = 0
dt 2 l
In diesem Fall ist die rücktreibende Kraft nicht proportional zur Auslenkung, sondern zum Sinus des Auslenkungswinkels. D.h. die
Lösung dieser Gleichung ist nicht einfach harmonisch.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Harmonische Schwingungen
– mg sin θ
2
π
θ
Um eine einfache harmonische Lösung zu finden, betrachten wir den
Fall, in dem der Auslenkungswinkel klein ist, so dass
mgθ
sinθ≈θ
sin θ ≈ θ
Kraft
und
T=
2π
l
= 2π
g
ω
163
θ≈θ benutzen.
Für kleine Auslenkungen kann man die Näherung sinθ
2
–π
Siehe Abb. 5.
Figur 5.
d 2θ g
+ θ ≈0
dt 2 l
Die Bewegungsgleichung wird vereinfacht
g
l
mit einer einfachen harmonischen Lösung, wobei
ω=
die Periode T mit der Länge l zunimmt;
Wir bemerken, dass
1.
Physik
164
die Periode T unabhängig von der Masse m und der Schwingungsamplitude A ist;
aus der Periode T die Erdbeschleunigung g bestimmbar ist.
Schwingungen und Resonanz
2.
3.
4.1.6 Versuchsexperiment: Vergleich des Feder- und
Fadenpendels
Wir beweisen mit einem Vergleich ihrer Bewegungen, dass die Bewegungen des Feder- und Fadenpendels ähnlich sind.
m
k
Die Periode des vertikalen Federpendels ist gleich
TFeder = 2 π
l
g
wobei m die Masse und k die Federkonstante ist.
Die Periode des Fadenpendels ist
TFaden = 2π
wobei l die Länge des Fadens und g die Erdbeschleunigung ist.
mg
k
Wenn die Masse an der vertikalen Feder aufgehängt wird, verlängert
sich die Feder, bis das System seine Gleichgewichtslage erreicht, in
dem die Federkraft die Gravitationskraft kompensiert.
Die Verlängerung der Feder ist
xG − x 0 =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Energieerhaltung bei harmonischen Schwingungen
mg
k
Wenn die Länge l des Fadens gleich der Verlängerung ist
l = xG − x 0 =
l
mg
m
= 2π
= 2π
= TFeder
g
gk
k
ist die Periode des Fadenpendels gleich der des Federpendels:
TFaden = 2π
Beide Masse werden sich zusammen bewegen.
4.2 Energieerhaltung bei harmonischen
Schwingungen
1 2
kx
2
Wir kennen den Ausdruck der potentiellen Energie, die in einer Feder
gespeichert wird:
E=
wobei x die Verschiebungs ist.
dx
= Aω cos(ωt + φ )
dt
165
Wir kennen auch die analytische Lösung der harmonischen Schwingung
x ( t) = A sin(ωt + φ )
v ( t) =
und die Geschwindigkeit ist gleich
Physik
166
Schwingungen und Resonanz
potentielle Energie
Mit diesen Beziehungen wird die gesamte mechanische Energie, die
als die Summe der kinetischen und potentiellen Energie definiert ist,
geschrieben als
E = E kin + E pot
kinetische Energie
1
1
= mv 2 + kx 2
2
2
1
1
= mA 2ω 2 cos2 (ωt + φ ) + kA 2 sin 2 (ωt + φ )
2 44424443 1
2 44
1
42444
3
Nun bemerken wir, dass die Kreisfrequenz ω von k/m abhängt, so
dass
2
1
1 k
1 k 1
mω 2 = m
= m = k
2
2 m
2 m 2
]
und deshalb beide Teile der Gleichung für die Gesamtenergie denselben Faktor besitzen
[
1
E = kA 2 cos2 (ωt + φ ) + sin 2 (ωt + φ )
2
1 2
kA
2
=
Die gesamte mechanische Energie des Systems verändert sich nicht
während der Schwingungsbewegung. Die Energie ist erhalten (natürlich, weil die wirkenden Kräfte rein konservativ sind, da wir keine
Reibung betrachtet haben.)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Ged mpfte harmonische Schwingungen
4.3 Gedämpfte harmonische
Schwingungen
Bei der freien Schwingung bleibt die Gesamtenergie konstant. Einmal angeregt, wird die Masse unendlich lang weiterschwingen.
Bei vielen Schwingungen bewegt sich die Masse nicht zwischen denselben Grenzen hin und her.
In der Realität entziehen Reibungskräfte der Bewegung-Energie. Das
System verliert mechanische Energie durch die von Reibungskräften
geleistete Arbeit.
Man spricht von gedämpften harmonischen Schwingungen.
167
Wir betrachten die idealisierte Situation, in der die Reibungskraft proportional zur Geschwindigkeit der Masse und immer ihr entgegengesetzt ist.
F ( t) = FRückstellkraft + FDämpfungkraft
= − kx ( t) − bv ( t)
wobei b die Dämpfungskonstante ist.
dx
d2x
= − kx − b
dt
dt 2
d 2 x b dx k
+
+ x=0
dt 2 m dt m
=m
F = ma = − kx ( t) − bv ( t)
Die Differentialgleichung ist dann
d.h.
Physik
168
Schwingungen und Resonanz
Diese Gleichung ist die Bewegungsdifferentialgleichung der einfachen gedämpften harmonischen Schwingung.
Nun müssen wir die Lösung x(t) vermuten. Der schwierigste Teil der
Lösung einer Differentialgleichung ist, dass man schon den Ansatz
vorher richtig raten muss, bevor man die Lösung finden kann.
Der Ansatz ist in diesem Fall
Amplitude
Schwingung
x ( t) = {
Ae −δt sin(
t4
+3
φ)
14ω
2
wobei δ der Dämpfungsfaktor ist.
Die Lösung x(t) einer schwach gedämpften Schwingung ist in Abb. 6
gezeigt. Die Bewegung verläuft in Form einer harmonischen Schwingung, deren Amplitude allmählich abnimmt.
k
−δ2
m
und
δ=
b
2m
Mit Algebra findet man die Bedingungen für den Dämpfungsfaktor
und die Kreisfrequenz
ω=
k
m
und
ω = ω 02 − δ 2
Wir definieren als ω0 die Kreisfrequenz der freien Schwingungen
ω0 =
Wir diskutieren jetzt die möglichen Lösungen (Siehe Abb. 7),
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
⇒
ω = ω 02 − δ 2
ω = ω0 =
k
m
⇒
Eine schwach gedämpfte Schwingung.
Ged mpfte harmonische Schwingungen
Figur 6.
a) ungedämpfte Schwingung
δ=0
b) gedämpfte Schwingung
δ≠0
ω = ω 02 − δ 2
169
b1) δ < ω0: die Bewegung ist eine Schwingung mit einer gedämpften
Amplitude. Aus der Gleichung
Physik
170
Schwingungen und Resonanz
k
b
δ 2 = < ω 02 =
⇒
2m
m
2
b < bk = 4 mk
schliessen wir, dass die Kreisfrequenz der gedämpften Bewegung
immer kleiner als die der freien Bewegung ist. Die Reibungskräfte
verlangsamen die Schwingung.
⇒
Die Bedingung ist
δ < ω0
d.h. die Dämpfungskonstante darf nicht zu gross sein, oder die Masse
kann nicht schwingen.
Wenn die Dämpfung zunimmt, wird sie einen kritischen Wert erreichen, bei dem keine Schwingung mehr auftritt.
⇒
b = bk = 4 mk = 2 mω 0
b2) δ = ω0: die Bewegung erreicht den aperiodischen Grenzfall, der
kritische Dämpfung genannt wird.
δ = ω0
Die Kreisfrequenz ist ω=0, und die Masse bewegt sich nur noch auf
ihre Gleichgewichtslage hin, aber schwingt nicht.
b3) δ > ω0: die Bewegung befindet sich im Bereich der überkritischen Dämpfung.
Je grösser die Dämpfung, desto länger dauert die Rückkehr der
Masse in die Ruhelage.
Die Kreisfrequenz besitzt keine physikalische Bedeutung mehr, weil
die Wurzel eines negativen Werts nicht reell ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Figur 7. Gedämpfte Schwingung. Die Auslenkung x(t) als Funktion der Zeit
(t) und der Dämpfungskonstante b ist gezeigt. Wenn b grösser als der
kritische Wert bk ist, gibt es keine Schwingungen mehr.
4.4 Erzwungene Schwingungen und
Resonanz
Obwohl die Wirkung von Reibungskräften nicht vermieden werden
kann, ist es möglich, dem schwingenden System Energie zuzuführen,
so dass die Reibungsenergieverluste kompensiert werden.
171
Wir können z.B. durch eine aufgezogene Feder Energie hineinbringen.
Physik
172
Schwingungen und Resonanz
Man spricht von erzwungenen Schwingungen.
Wir betrachten eine, auf das schwingende System wirkende, äussere
periodische Kraft, die kosinusförmig ist
Fäussere = F0 cos(ωt)
wobei ω die Kreisfrequenz der äusseren Kraft ist. Die Kreisfrequenz der freien Schwingung (die Eigenkreisfrequenz) wird als ω0
bezeichnet.
Experimentell beobachten wir, dass nach einer nicht-stationären
Schwingung (Einschwingvorgang), bei der sich die Masse kompliziert bewegt, die Masse dann mit der Kreisfrequenz der äusseren
Kraft schwingt.
Figur 8. Erzwungene Schwingung. Nach einer nicht-stationären
Schwingung, wird die Masse mit der Kreisfrequenz der äusseren Kraft
schwingen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Wir suchen die stationäre Lösung.
m
dx
d2x
+b
+ kx = F0 cos(ωt)
dt
dt 2
dx
d2x
= − kx − b + F0 cos(ωt)
dt
dt 2
Die Bewegungsgleichung einer schwingenden Masse, die an eine
Feder mit Federkonstante k gebunden ist, und einer Reibungskraft –
bv und der antreibenden Kraft F0cosωt unterworfen ist, ist
d.h.
m
Der stationäre Ansatz wird geschrieben als
x ( t) = A cos(ωt − α )
wobei ω die Kreisfrequenz der äusseren Kraft, A die Amplitude und
α eine Phasenkonstante ist.
Die Amplitude und die Phase der Schwingung hängen von der
Amplitude und der Winkelgeschiwndigkeit der äusseren Kraft, von
der Kreisfrequenz der freien Schwingung ω0, und vom
Dämpfungsfaktor b ab.
173
Die Ausdrücke für A und α können leicht mit Algebra gefunden werden.
Physik
174
Schwingungen und Resonanz
Erzwungene Schwingungen und Resonanz
reell
2
2
ω )+
(1k4−2m4
3
(− mω
imaginär
F
ib
ω = 0 e iα
{
A
+ ibω + k ) Ae − iα = F0
− mω 2 Ae i(ωt −α ) + ibωAe i(ωt −α ) + kAe i(ωt −α ) = F0e iωt
m(−ω 2 z( t)) + b(iωz( t)) + kz( t) = F0e iωt
Wenn wir diese Gleichung in der Differentialgleichung einsezten, finden wir
dz
d 2z
+ b + kz = F0e iωt
dt
dt 2
ist.
Physik
F0
2
m 2 (ω 02 − ω 2 ) + b 2ω 2
und
ω0 = k / m
tan α =
bω
m(ω 02 − ω 2 )
175
wobei die Winkelgeschwindigkeit der freien Schwingung (die Eigenkreisfrequenz)
A=
Wenn wir nach der Amplitude und der Phase auflösen, finden wir
F0
cosα = k − mω 2
A
F0 sin α = bω
A
Nun betrachten wir den rellen und den imaginären Teile der Gleichung. Es gilt
d.h.
Wir lösen die Differentialgleichung mit Hilfe der komplexen Zahlen.
Wir schreiben eine neue Gleichung, die für z in der komplexen Ebene
gilt
m
Gesucht ist die komplexe Lösung z(t).
Wegen der Eulerschen Formel,
e iθ = cosθ + i sin θ
ist die Lösung x(t) gleich der reellen Projektion der komplexen
Lösung z(t)
x ( t) = Re z( t)
Um die Differentialgleichung zu lösen, verwenden wir den folgenden
komplexen Ansatz
z( t) = Ae i(ωt −α )
Die zeitlichen Ableitungen sind
dz
= Aiωe i(ωt −α ) = iωz( t)
dt
d 2z
= A(iω ) 2 e i(ωt −α ) = −ω 2 z( t)
dt 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
176
Schwingungen und Resonanz
Wir schliessen daraus, dass die Amplitude und die Phase stark von
der Kreisfrequenz der treibenden Kraft abhängen.
Wenn die Kreisfrequenz der treibenden Kraft in der Nähe der Eigenkreisfrequenz ist, wird die Amplitude der Schwingung zunehmen.
Eine Resonanzbedingung wird erreicht, wenn die Amplitude der
Schwingung viel grösser als die der antreibenden Kraft ist (Siehe
Abb. 9),
Wenn wir die Energie des Systems betrachten, beobachten wir, dass
die von der treibenden Kraft geleistete Arbeit Energie zuführt, die die
Schwingungsamplitude vergrössert. Diese Energie wird auch durch
Reibung verloren.
Zwischen zugeführter und verlorener Energie stellt sich schliesslich
ein Gleichgewicht ein. Die Masse schwingt mit der Kreisfrequenz der
treibenden Kraft ω und einer Amplitude die von ω und ω0 abhängt.
Figur 9. Erzwungene Schwingung. Wenn die Kreisfrequenz der
antreibenden Kraft in der Nähe der Eigenkreisfrequenz ist, wird die
Amplitude der Schwingung zunehmen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Erzwungene Schwingungen und Resonanz
Für eine Kreisfrequenz ω stark verschieden von der Eigenkreisfrequenz ω0, folgt α ≈ 0.
Ist ω0≈ω, wird α ≈ π/2.
b2
2m 2
Die Rezonanzbedingung, bei der die Amplitude maximal wird, ist
ω ≈ ω Resonanz = ω 02 −
dx
= − Aω sin(ωt − α )
dt
Die Geschwindigkeit der Masse kann mit der Ableitung nach der Zeit
gefunden werden
v ( t) =
Im Resonanzfall, wenn α ≈ π/2, sind die Geschwindigkeit und die
treibende Kraft in Phase
π
v ( t) = − Aω sin(ωt − ) = A cos(ωt)
2
177
Die Beziehung der Amplitude als Funktion des Verhältnisses ω/ω0 ist
in Abb. 10 für verschiedene Dämpfungsfaktoren gezeigt.Für b=0
(d.h. keine Dämpfund) wird die Amplitude unendlich, wenn die
Resonanzbedingung erreicht wird.
Physik
178
Schwingungen und Resonanz
Figur 10. Amplitude der erzwungenen Schwingung. Die verschiedenen
Kurven entsprechen verschiedenen Dämpfungsfaktoren. Für b=0 (keine
Dämpfung) wird die Amplitude unendlich, wenn die Resonanzbedingung
erreicht wird.
Versuchsexperiment. Tacoma Brücke.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 5
Mechanische Wellen
5.1 Was sind Wellen?
Wir betrachten ein Medium in seiner Gleichgewichtslage. Wenn wir
eine physikalische Eigenschaft dieses Mediums in einem Punkt stören, wird sich diese Störung durch das Medium ausbreiten.
Diese Störung wird eine Welle genannt. Man spricht von Wellenausbreitung.
179
Als Medium können wir viele verschiedene Beispiele erwähnen, z.B.
ein Seil, eine Saite, ein Festkörper, die Luft, Wasser, usw...
5.2 Seil- oder Saitenwellen
Wir betrachten ein Seil.
Physik
180
Wenn wir es mit einem kurzen seitlichen Ruck auslenken, beobachten
wir, dass die anfängliche Auslenkung als Wellenberg mit konstanter
Geschwindigkeit entlang dem Seil wandert. Siehe Abb. 1.
Mechanische Wellen
Der Zusammenhang zwischen der Ausbreitungsgeschwindigkeit der
Wellen und den physikalischen Eigenschaften des Seils kann mit
Hilfe der Newtonschen Gesetze hergeleitet werden.
5.2.1 Ausbreitungsgeschwindigkeit transversaler
elastischer Seilwellen
Seil- oder Saitenwellen
Ein Massenelement kann sich in der vertikalen Richtung um seine
Ruhelage bewegen.
Wir unterteilen das Seil in viele differentielle Massenelemente dm.
Wir sagen, dass sich die transversale Auslenkung als eine Welle ausbreitet.
a)
Zur Zeit t=0 kann die Form des Seils durch eine Funktion ξ(x)
beschrieben werden, wobei ξ die Auslenkung des Seils ist. Jede
bestimmte Koordinate x entspricht einem Massenelement.
Nach einiger Zeit ist der Wellenberg weitergewandert und die Form
des Seils ist nun durch eine andere Funktion gegeben.
b)
c)
Die Form des Seils als Funktion der Zeit kann deshalb durch eine
Funktion von zwei Variablen ausgedrückt werden
Physik
Fy = S sin α ′ − S sin α
181
Wir betrachten nun ein einzelnes Massenelement. Die auf das Massenelement wirkende resultierende vertikale Komponente der Kraft
ist
wobei x die Raumkoordinate, und t die Zeit ist. Diese Funktion, die
Wellenfunktion heisst, beschreibt die Ausbreitung der Wellen durch
eine Anordnung aller Massenelemente des Seils als Funktion der
Zeit.
ξ ( x, t)
d)
Figur 1. Ausbreitung einer Seilwelle. Der Wellenberg wandert mit
konstanter Geschwindigkeit.
Man kann sich die Wellen als Auslenkung kleiner Massenlemente des
Seils vorstellen.
Wir bemerken, dass die einzelnen Massenelemente des Seils durch
die Wellenbewegung nicht transportiert werden: Sie schwingen senkrecht zur Ausbreitungsrichtung der Welle. Sie bleiben so lange in
Ruhe, bis der Wellenberg sie erreicht, führen dann eine Schwingung
um ihre Ruhelage aus und kehren schliesslich in den Ruhestand
zurück.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
182
Mechanische Wellen
α
S
α'
ξ(x+dx)
x+dx
dm
S ξ(x)
x
Kräfte, die auf das Massenelement dm wirken.
x
wobei S die Spannung des Seils ist. α und α’ sind die Winkel an beiden Enden des Massenelements zu Horizontalen (die Gravitationskraft wird als vernachlässigbar gegenüber der Spannung
vorausgesetzt.). Siehe Abb. 2.
y
Figur 2.
Für kleine Auslenkungen gilt die genäherte Gleichung
Fy ≈ S tan α ′ − S tan α
∂ξ ( x, t)
∂x
und
tan α ′ =
∂ξ ( x + dx, t)
∂x
Die Steigung des Seils im Punkt x ist gleich der Ableitung nach x der
Auslenkung. Da die Funktion ξ von zwei Variablen abhängt, müssen
wir eine partielle Ableitung benutzen:
tan α =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Seil- oder Saitenwellen
D.h. die resultierende vertikale Kraft kann als Funktion der Ableitung
der Auslenkungsfunktion geschrieben werden
Fy ≈ S tan α ′ − S tan α
∂ 2ξ
dx
∂x 2
∂ξ ( x + dx, t) ∂ξ ( x, t)
= S
−
∂x
∂x
≈S
wobei wir differentielle dx-Segmente angenommen haben.
∂ξ
∂t
und
a( x, t) =
S
∂ 2ξ
∂ 2ξ
dx = dm 2
∂x 2
∂t
∂ 2ξ
∂t 2
Die Geschwindigkeit und die Beschleunigung der differentiellen Segmente können mit Hilfe der zeitlichen partiellen Ableitungen gewonnen werden:
v ( x, t) =
⇒
Aus dem zweiten Newtonschen Gesetz folgt
Fy = ( dm) a
M
L
⇒
dm = ρdx
183
Wir führen nun die Gesamtmasse des Seils M und seine Länge L ein.
Die Längendichte ρ des Seils wird definiert als
ρ=
Die Einheit der Längendichte ist Masse/Länge, d.h. kg/m.
Physik
184
Mechanische Wellen
⇒
∂ 2ξ S ∂ 2ξ
=
∂t 2 ρ ∂x 2
Mit Hilfe der Definition der Längendichte gilt die folgende Bewegungsgleichung
∂ 2ξ
∂ 2ξ
dx = ρdx 2
∂t
∂x 2
Seil- oder Saitenwellen
geschrieben werden, wobei v der Ausbreitungsgeschwindigkeit
(oder Phasengeschwindigkeit) der Welle entspricht.
Diese Gleichung stellt eine Welle dar, die sich ohne Dispersion in die
negative x-Richtung (+) oder die positive x-Richtung (–) ausbreitet.
Wir betrachten z.B. eine Welle, die sich in positiver x-Richtung
bewegt.
S
Diese Gleichung wird die Differentialgleichung der Wellenausbreitung genannt.
Siehe Abb. 3.
v×t
v
ξ′ = ξ′( x ′)
y'
O'
Bewegtes Koordinatensystem.
beschrieben.
y
O
Figur 3.
Physik
v
x,x'
185
Der Wellenberg bewegt sich bezüglich des Ursprungs O mit der
Geschwindigkeit v längs der positiven x-Achse. Im mitbewegten
System mit Ursprung O’ wird die Bewegung für beliebige Zeiten
durch
Im allgemein nennt man eine Gleichung der Form
∂ 2ξ
∂ 2ξ
−K 2 =0
∂t 2
∂x
Wellengleichung, wobei K eine Konstante ist. Wir beweisen nun,
dass die Konstante K der Ausbreitungsgeschwindigkeit im Quadrat
entspricht.
5.2.2 Allgemeine Lösung der Wellengleichung
Wir suchen eine Funktion ξ(x,t), die die Wellengleichung erfüllt.
Im Fall der Seilwellen beschreibt ξ(x,t) die transversale Auslenkung
des Seils.
Gewöhnlich wird sich die Form eines Wellenberges mit der Zeit verändern. Dieser Effekt heisst Dispersion. Wir werden die Dispersion
vernachlässigen und eine stabile Form des Wellenberges annehmen.
Wenn ξ(x,t) die zeitliche und räumliche Ausbreitung der Wellen darstellt und es keine Dispersion gibt, sind die zwei Variablen x und t
nicht voneinander unabhängig. Die Ausbreitung der Wellen kann als
ξ ( x, t) = ξ ( x ± vt)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
186
Mechanische Wellen
⇒
ξ ( x, t) = ξ ( x ′, 0) = ξ ( x − vt, 0)
Damit lautet die Wellenfunktion im nicht bewegten Koordinatensystem.
x ′ = x − vt
Wir werden beweisen, dass die Geschwindigkeit der Ausbreitung mit
Hilfe der Differentialgleichung bestimmt werden kann.
∂ξ ( x, t) ∂ξ ∂x ′
∂ξ
∂ 2ξ ( x, t)
∂ 2ξ
=
= (−v )
⇒
= v2
∂t
∂x ′ ∂t
∂x ′
∂t 2
∂x ′ 2
∂ξ ( x, t) ∂ξ ∂x ′ ∂ξ
∂ 2ξ ( x, t) ∂ 2ξ
=
=
⇒
=
∂x
∂x ′ ∂x ∂x ′
∂x 2
∂x ′ 2
Seil- oder Saitenwellen
S
ρ
⇒
v=±
S
ρ
Die Ausbreitungsgeschwindigkeit der Seilwellen wird damit vorausgesagt als
v2 =
wobei S die Spannung des Seils oder der Saite, und ρ die Längendichte ist.
Die Ausbreitungsgeschwindigkeit hängt nur von den Eigenschaften
des Seils ab.
Die Ausbreitungsgeschwindigkeit nimmt mit der Spannung zu. Je
grösser die Spannung ist, desto schneller wird das Massenelement in
seine Gleichgewichtslage zurückkehren.
Versuchsexperiment: Seilwelle: Ausbreitungsgeschwindigkeit bei
verschiedenen Spannungen.
Wir erhalten daraus
∂ 2ξ ( x, t)
∂ 2ξ
∂ 2ξ ( x, t)
= v2
= v2
∂t 2
∂x ′ 2
∂x 2
2
2
[m ] = m
[s ] s
Die Ausbreitungsgeschwindigkeit nimmt mit der Längendichte ab. Je
grösser die (träge) Masse ist, desto langsamer wird das Massenelement in seine Gleichgewichtslage zurückkehren.
]
m / s2
=
kg / m
[kg
D.h. die Ausbreitungsgeschwindigkeit kann direkt von der Differentialgleichung abgelesen werden.
=
Wir bemerken, dass die Einheiten der Gleichung gegeben sind durch
[N ]
[kg / m]
d.h., die Einheit entspricht wirklich einer Geschwindigkeit.
Physik
187
5.2.3 Ausbreitungsgeschwindigkeit von Seilwellen
Wir verwenden das Ergebnis
∂ 2ξ ( x, t)
∂ 2ξ ( x, t)
− v2
=0
∂t 2
∂x 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
188
In Abb. 4 beobachten wir zwei Wellenberge, die sich in entgegensetzten Richtungen bewegen.
5.3 Prinzip der Superposition
Mechanische Wellen
Ist ξ1(x-vt) die Wellenfunktion der sich in positiver x-Richtung bewegenden Welle und ξ2(x+vt) der sich in negativer x-Richtung bewegenden Welle, so ist die Gesamtwellenfunktion die mathematische
Summe der Einzelwellenfuntkionen:
Prinzip der Superposition
ξ ( x, t) = ξ1 ( x − vt) + ξ2 ( x + vt)
Im Fall, dass die Wellen entgegengesetzte Amplituden haben, werden
sie einander auslöschen (siehe Abb. 5.)
a)
b)
c)
d)
Figur 5. Prinzip der Superposition. Die resultierende Welle wird durch
Addition beider Wellen gefunden.
Physik
189
Wenn sich die beiden Wellenberge treffen, ist die gesamte Auslenkung des Seils gleich der Summe der Auslenkungen der einzelnen
Wellenberge. Nachher trennen sich die Wellenberge wieder und laufen weiter, ohne dass sich ihre Form geändert hat.
a)
b)
c)
d)
Figur 4. Zwei Wellen begegnen sich. In c) ist die resultierende Amplitude
gleich der Summe der Amplituden der beiden einlaufenden Wellen.
Diese fundamentale Eigenschaft von Wellen wird das Prinzip der
Superposition genannt.
Mathematisch wird diese Eigenschaft einfach ausgedrückt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
190
Mechanische Wellen
5.4 Harmonische Wellen
Wenn wir das Ende eines Seils in Form einer harmonischen Schwingung auf und ab bewegen, wird sich längs des Seils eine sinusförmige
Welle ausbreiten. Eine solche Welle wird als harmonische Welle
bezeichnet. Siehe Abb. 6.
Die laufende Welle kann mit Hilfe einer Sinusfunktion geschrieben
werden
ξ ( x, t) = ξ ( x ± vt) = ξ0 sin( k ( x ± vt))
ω
v
Sinusförmige Welle.
λ
x
wobei k die Wellenzahl (oder Wellenvektor), und ξ0 die Amplitude
ist.
Figur 6.
Der Abstand zwischen zwei aufeinanderfolgenden Wellenkämmen
wird die Wellenlänge λ genannt. Die Form der Welle wiederholt sich
im räumlichen Abstand einer Wellenlänge.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Superposition harmonischer Wellen
⇒
k=
2π
λ
Die Wellenzahl hängt mit der Wellenlänge zusammen. Aus der
Raumabhängigkeit des Arguments der Sinusfunktion folgt
k ( x + λ ) = kx + 2π ⇒ kλ = 2π
Die Wellenfunktion kann als Funktion der Kreisfrequenz ω berechnet werden
ξ ( x, t) = ξ0 sin( k ( x ± vt))
= ξ0 sin( kx ± kvt)
oder
v=
ω
k
= ξ0 sin( kx ± ωt)
wobei für die Kreisfrequenz gilt
ω = kv
5.5 Superposition harmonischer Wellen
Die durch Superposition harmonischer Wellen resultierende Welle
hängt von den Phasen der ursprünglichen Wellen ab.
191
Wir betrachten z.B. zwei harmonische Wellen, die von zwei gleichen
Quellen Q1 und Q2 mit derselben Amplitude, derselben Frequenz und
einem bestimmten Phasenunterschied kommen. Die zwei Wellen treffen sich in einem Punkt P, der sich im Abstand x1 von Q1, und x2 von
Q2 befindet. Siehe Abb. 7.
Wir betrachten einen bestimmten Zeitpunkt.
Physik
192
Mechanische Wellen
Superposition harmonischer Wellen
Für
Physik
harmonische Welle
n = 0,1, 2,...
1
2 A cos (δ + k∆x )
2
1
(δ + k∆x ) = nπ
2
1
1
(δ + k∆x ) = n + π
2
2
n = 0,1, 2,...
193
ist der Gangunterschied so, dass die beiden Wellen in Phase sind. Die
resultierende Welle besitzt die doppelte Amplitude. Man spricht von
konstruktiver Interferenz.
Für
d.h. die resultierende Welle ist eine harmonische Welle mit derselben
Frequenz und derselben Wellenzahl wie die einlaufenden Wellen. Die
Phase unterscheidet sich von beiden ursprünglichen Wellen. Die
Amplitude der resultierenden Welle ist gleich
Amplitude
1
1
= 2 A cos (δ + k∆x ) sin kx1 − ωt + (δ + k∆x )
2
1444
2444
3 144442244443
1
1
ξ = 2 A sin kx1 − ωt + (δ + k∆x ) cos (δ + k∆x )
2
2
1
1
sin α + sin β = 2 sin (α + β ) cos (α − β )
2
2
Aus der Gleichung
Q2
folgt
Wegen des Prinzips der Superposition ist die resultierende Welle im
Punkt P gleich der Summe der zwei einlaufenden Wellen:
X1
X2
Q1
ξ ( x, t) = ξ1 ( x, t) + ξ2 ( x, t)
= A sin( kx1 − ωt) + A sin( kx 2 − ωt + δ )
Gangunterschied.
P
wobei δ der Quellenphasenunterschied ist.
Figur 7.
Weil die Wellen verschiedene Wege zurückgelegt haben, erreichen sie
den Punkt P mit einer zusätzlichen Phase. Diese Wegdifferenz wird
als der Gangunterschied ∆x bezeichnet
∆x = x 2 − x1 ⇒
ξ = A sin( kx1 − ωt) + A sin( k ( x1 + ∆x ) − ωt + δ )
= A sin( kx1 − ωt) + A sin( kx1 − ωt + (δ + k∆x ))
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
194
Mechanische Wellen
addieren sich die Wellen zu null, weil sie gleich grosse, aber entgegengesetzte Amplituden besitzen. Man spricht von destruktiver
Interferenz, und die resultierende Welle verschwindet.
5.6 Stehende Wellen
5.6.1 Eigenschwingungen eines Seils
Versuchsexperiment: Eigenschwingung einer Saite
Ein Seil ist an zwei Wänden fixiert. Wenn wir das Seil mit einer äusseren Kraft in Form einer harmonischen Schwingung auslenken,
beobachten wir für bestimmte Frequenzen eine stehende Welle. Die
Amplitude der Schwingung ist in diesem Fall gross.
Man spricht von Resonanzfrequenzen. Die tiefste Frequenz heisst
Grund- oder erste Eigenfrequenz ν1. Die Welle wird als erste Harmonische bezeichnet.
Die zweite Eigenfrequenz ν2 hat die doppelte Frequenz. Siehe Abb. 8.
Die Schwingung (d.h. die zweite Harmonische) besitzt einen Knoten und zwei Bereiche, die Bäuche genannt werden.
Allgemein besitzt die n-te Harmonische (d.h. die stehende Welle miz
der Eigenfrequenz νn) genau n Bäuche und n-1 Knoten.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Stehende Wellen
λ
=L
2
n = 1, 2, 3,...
Um die Eigenfrequenzen zu bestimmen, bemerken wir, dass für eine
stehende Welle die Länge L der Saite gleich einem ganzzahligen Vielfachen von λ/2 sein muss:
n
2L
n
n = 1, 2, 3,...
D.h. es gibt eine unendliche Anzahl von Eigenfrequenzen, die die
Wellenlänge λn besitzen, wobei gilt
λn =
v
v
=n
2L
λn
(n = 1, 2, 3,...)
Aus dieser Bedingung für stehende Wellen können wir die Eigenfrequenzen νn der n-ten Harmonischen ableiten, als
υn =
v
2L
und υ n = nυ1
wobei v die Ausbreitungsgeschwindigkeit einer Welle in der Saite ist.
Die Frequenz der n-ten Harmonischen kann als Funktion der Grundfrequenz (der ersten Harmonischen) ausgedrückt werden
υ1 =
S
ρ
⇒
υ1 =
1 S
2L ρ
Aus der Bestimmung der Ausbreitungsgeschwindigkeit folgt
v=
195
wobei S die Spannung der Saite, und ρ die Längendichte ist, d.h.
die Harmonischen der Saite können mit Hilfe der Spannung geändert
werden.
Physik
196
Saite
L
λ 1 = 2L
1
λ 3 = 2L
3
λ 2 = 2L
2
Dritte
Harmonische
λ 5 = 2L
5
λ 4 = 2L
4
5-te
Harmonische
2L
n
λ n=
Eigenschwingungen einer Gitarrensaite.
n-te
Harmonische
4-te
Harmonische
zweite
Harmonische
erste
Harmonische
Mechanische Wellen
Figur 8.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Stehende Wellen
5.6.2 Wellenfunktionen stehender Wellen
und
ξ2 ( x, t) = ξ0 sin( kx + ωt)
Wir betrachten zwei Wellen gleicher Wellenzahl, Frequenz und
Amplitude, und entgegengesetzter Ausbreitungsrichtung.
ξ1 ( x, t) = ξ0 sin( kx − ωt)
= ξ0 sin( kx − ωt) + ξ0 sin( kx + ωt)
= 2ξ0 sin( kx )cos(ωt)
ξ ( x, t) = ξ1 ( x, t) + ξ2 ( x, t)
Aus dem Prinzip der Superposition folgt, dass die resultierende Welle
gleich
ist.
Es folgt, dass ein Punkt an einem beliebigen Ort x eine einfache harmonische Bewegung hat, und dass die Amplitude von Ort zu Ort verschieden ist.
für alle Zeiten t
Ist die Saite an beiden Enden (d.h. bei x=0 und x=L) fest eingespannt,
gibt es eine Randbedingung, die für alle Zeiten gelten muss
ξ (0, t) = ξ ( L, t) = 0
für alle Zeiten t
Die Bedingung ist bei x=0 immer erfüllt. Bei x=L muss gelten
ξ ( L, t) = 2ξ0 sin( kL)cos(ωt) = 0
⇒ sin( kL) = 0
k n L = nπ
n = 1, 2, 3,...
197
Die Bedingung wird erfüllt, wenn die Wellenzahl die folgenden
Werte besitzt
Physik
198
Mechanische Wellen
2L
n
2π
L = nπ
λn
oder in Wellenlängen ausgedrückt
oder
λn =
n = 1, 2, 3,...
n = 1, 2, 3,...
Dieses Ergebnis entspricht genau der Bedingung für stehende Wellen,
die wir schon gesehen haben.
nπ
und ω n = 2πυ n
L
( n = 1, 2, 3,...)
ξn ( x, t) = ξn sin( kn x )cos(ω m t)
Die Wellenfunktion für die n-te Harmonische kann daher ausgedrückt
werden als
wobei
kn =
5.7 Wellen im Festkörper
Longitudinale und transversale Wellen können sich durch Festkörper
ausbreiten. Ein Schlag an eine Ende eines festen Stabs pflanzt sich
z.B. längs des Stabs fort, und wird schliesslich an das andere Ende
des Stabs gelangen.
Versuchsexperiment. Welle im Messingstab.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellen im Festk rper
Longitudinale Wellen können sich in allen Medien ausbreiten, die
Volumenelastizität besitzen, wie z.B. in Festkörpern, aber auch in
flüssigen und gasförmigen Stoffen. Es muss eine Rückstellkraft wirken, die der Volumenänderung entgegen gerichtet ist.
Transversale Wellen sind etwas komplizierter, da bei ihnen Schubkräfte an den Massenlementen des Körpers angreifen müssen, um sie
wieder in ihre Ausgangslage zurückzutreiben. Solche Wellen breiten
sich nur in festen Körpern aus.
Die Ausbreitungsgeschwindigkeit der longitudinalen elastischen
Wellen in einem Festkörper lässt sich mit einem Gesetz über elastische Deformationen herleiten.
]
Der Ausdruck für die Ausbreitungsgeschwindigkeit kann mit einer
Dimensionsbetrachtung vermutet werden. Die Ausbreitungsgeschwindigkeit der Festkörperdeformationen im Quadrat muss umgekehrt proportional zur Dichte des Körpers sein
[
m 2
Y
v2
3
=
s ρ kg / m
M
V
199
wobei Y eine Konstante ist. Die Dichte (oder Volumendicthe) ρ wird
definiert als
ρ=
wobei M die Masse des Körpers und V das Volumen ist.
Die Einheit der Dichte ist Masse/Volumen, d.h. kg/m3.
Physik
200
Mechanische Wellen
Die Konstante Y muss die folgende Einheit besitzen:
kg m 2 kg kg.m N
Y= 3
= 2= 2 2= 2
m s m.s m s m
Sie wird Elastizitätsmodul Y genannt.
Allgemein ändert ein Körper seine Form, wenn Kräfte an ihm ziehen
oder ihn komprimieren. Wenn der Körper seine ursprüngliche Form
wieder annimmt, wenn die Kräfte nicht mehr wirken, dann heisst die
Deformation elastisch.
Die meisten Körper sind nur bis zu einer bestimmten Grenze der
Kräfte elastisch, die Elastizitätsgrenze genannt wird.
∆l
= YAε
l
Innerhalb der Elastizitätsgrenze eines Metallstabs gilt das Hookesche Gesetz
F = YA
∆l
l
wobei F die Kraft, die an dem Stab zieht, A der Querschnitt des Stabs
und Y das Elastizitätsmodul ist. Die relative Längenänderung (oder
Dehnung) ist
ε=
Nach dem Hookeschen Gesetz ist die Dehnung des Stabs proportional zu der Kraft geteilt durch den Querschnitt.
Einige repräsentative Ausbreitungsgeschwindigkeiten in verschiedenen Medien sind in Tabelle 1 zusammengefasst.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellen im Festk rper
Elastizitätsmodul (N/m2)
TABLE 1. Ausbreitungsgeschwindigkeit
Stoff
Gase
201
Ausbreitungsgeschwindigkeit (m/s)
331
343
Luft 0°C
Luft 20°C
1284
965
1402
Helium 20°C
Flüssigkeiten
Wasserstoff 20°C
Wasser 0°C
6000
5941
6420
1522
Festkörper
1482
1x1011
Wasser 20°C
Aluminium
Seewasser 20°C
Stahl
2x1011
Granite
Physik
202
Mechanische Wellen
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 6
Relativität
6.1 Relativbewegung
Im ersten Kapitel (Mechanik) haben wir gelernt, dass sowohl Ruhe
wie Bewegung relative Begriffe sind.
Wenn ein Zug z.B. durch eine Station fährt, befindet er sich relativ
zur Station in Bewegung. Ein Passagier des Zuges kann aber genau so
gut sagen, dass sich die Station relativ zum Zug in Bewegung befindet, und zwar in entgegengesetzter Richtung.
D.h., die Bewegung muss immer relativ zu einem bestimmten Koordinatensystem (oder Bezugssystem) definiert werden. Wir sagen,
dass ein Bezugssystem vom Beobachter gewählt wird.
Siehe Abb. 1.
203
Der Beobachter befindet sich im Ursprung seines Bezugssystems.
Seine Beobachtungen und seine Experimente werden relativ zu seinem Bezugssystem durchgeführt.
Physik
204
Relativität
Figur 1.
ez
e
y
Ursprung O
z
y
Beobachter
ex
x
Definition des Beobachters und seines Bezugssystems.
Im Beispiel des Zuges, der durch die Station fährt, haben wir zwei
Beobachter mit zwei verschiedenen Bezugssystemen betrachtet. Ein
Beobachter, der sich mit dem Zug bewegt, und ein zweiter, der sich in
Ruhe in der Station befindet.
Da verschiedene Beobachter verschiedene Bezugssysteme verwenden, ist es wichtig zu wissen, wie Beobachtungen, die von verschiedenen Beobachtern gemacht werden, miteinander in Beziehung stehen.
6.1.1 Transformation von einem Bezugssystem ins
andere
Wir betrachten zwei Beobachter O und O’, die sich relativ zueinander bewegen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Relativbewegung
y
R(t)
r(t)
x z'
O'
y'
r'(t')
x'
Beide Beobachter O und O’ kennen die Gesetze der Mechanik und
beobachten dasselbe Ereignis, z.B. die Bewegung eines Körpers entlang seiner Bahn.
O
Siehe Abb. 2.
z
Figur 2. Definition von zwei Beobachtern, die die Bewegung eines Körpers
messen.
205
Beobachter O und O’ messen die Bahnkurve des Körpers als Funktion der Zeit. Sie benutzen ähnliche Uhren, um die Zeiteinheit zu
definieren. Beide Beobachter werden die Bahn relativ zu ihrem eige-
Physik
206
Relativität
nen Koordinatensystem definieren. Die Ortsvektoren als Funktion der
Zeit werden bezeichnet als
r r
r r
r = r ( t)
O′: r ′ = r ′ ( t′ )
O:
Zeit. Beide Beobachter benutzen ähnliche Uhren. Wir nehmen an,
dass beide Uhren synchronisiert wurden, und deshalb verwenden
beide Beobachter die gleiche Zeit.
t = t′
Das scheint eine vernünftige Annahme zu sein (aber sie gilt nur, wenn
die Zeit unabhängig von der Bewegung des Beobachters ist. Siehe
später.).
)
Übergang von O nach O'
Wir leiten die Gleichungen der Transformation für den Ortsvektor
und die Zeit von einem Bezugssystem ins andere her
r
r
r
r
r
r
r ( t) = R( t) + r ′ ( t′ ) r ′ ( t′ ) = − R( t) + r ( t)
t ′ = t
t = t′
14442444
3 144424443
Übergang von O' nach O
(
Für die Transformation der Geschwindigkeit von O’ nach O gilt
r
r
r
r
r
r
dR dr ′ dR r
dr ( t) d r
=
R( t) + r ′ ( t) =
+
=
+ v′
v ( t) =
dt
dt
dt
dt
dt
wobei
r
r
r dr ′ dr ′
v′ =
=
dt
dt′
die Geschwindigkeit des Körpers gemessen relativ zum Beobachter
O’ ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Inertialsysteme
relativ zu O
Es folgt, dass die Transformation der Geschwindigkeit gleich
r
r
r
dR
( t) =
v{
+ v{
′ ( t)
dt relativ
zu O ′
ist.
Aus einer ähnlichen Herleitung folgt die Transformation der
Beschleunigung
r
r
r
d 2R
( t) = 2 + a{
a{
′ ( t)
dt
relativ zu O ′
relativ zu O
Im Allgemeinen folgt aus den Tranformationsgleichungen, dass verschiedene Beobachter, die sich relativ zueinander bewegen, verschiedene Geschwindigkeiten und Beschleunigungen messen.
6.2 Inertialsysteme
Das erste Newtonsches Gesetz (Trägheitsprinzip) sagt, dass ein Körper in Ruhe bleibt oder sich mit konstanter Geschwindigkeit bewegt,
wenn keine resultierende Kraft auf ihn wirkt.
D.h., dass die Beschleunigung des Körpers gleich null ist, wenn die
resultierende Kraft, die auf den Körper wirkt, verschwindet.
207
Wir haben gelernt, dass im Allgemeinen zwei Beobachter nicht dieselbe Beschleunigung beobachten, d.h.
Physik
208
Relativität
r
r
r
d 2R
( t) = 2 + a{
a{
′ ( t)
dt
relativ zu O ′
relativ zu O
⇒
relativ zu O ′
r
r
( t) ≠ a{
a{
′ ( t)
relativ zu O
wenn
r
d 2R
≠0
dt 2
Wenn die zwei Beobachter eine unterschiedliche Beschleunigung
messen, kann das zweite Newtonsche Gesetz nicht für beide Beobachter gelten!
Im Fall, dass die auf den Körper wirkende resultierende Kraft verschwindet, muss die gemessene Beschleunigung gleich null sein.
Aber wenn
r
d 2R
≠0
dt 2
kann die Beschleunigung nicht gleichzeitig für beide Beobachter verschwinden.
Wir haben bewiesen, dass die Newtonschen Gesetze nicht in allen
Bezugssystemen gelten.
Ein Bezugssystem, in dem die Newtonschen Gesetze gelten,
heisst Inertialsystem.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
6.3 Scheinkräfte
Welches Ergebnis bekommen wir, wenn wir die Beschleunigung
eines Körpers relativ zu einem Bezugssystem messen, das relativ zu
einem Inertialsystem beschleunigt wird? D.h.
r
d 2R
≠0
dt 2
r
a{
relativ zu O
≠
relativ zu O ′
r
a{′
wenn
r
d 2R
≠0
dt 2
In diesem Fall stimmt im beschleunigten Bezugssystem die resultierende Kraft, die auf den Körper wirkt, nicht mit dem Produkt der
Masse und der gemessenen Beschleunigung überein
r
r
Inertialsystem O: F = ma
r
r
F ≠ ma ′
O′:
weil
In bestimmten Fällen können keine Kräfte auf den Körper wirken,
aber der Körper kann doch relativ zum Nicht-Inertialsystem
beschleunigt werden.
Wenn wir das zweite Newtonsche Gesetz in einem beschleunigten
Bezugssystem anwenden wollen, müssen wir fiktive Kräfte (oder
Scheinkräfte) einführen. Diese fiktiven Kräfte werden nicht wirklich
wirken. Sie dienen als Hilfsmittel, damit die Beziehung
r
r
F = ma
209
auch für Beschleunigungen gilt, die relativ zum Nicht-Inertialsystem
gemessen werden.
Physik
210
Relativität
6.3.1 Rotierendes Bezugssystem
Wir betrachten eine um eine feste Drehachse rotierende Scheibe, auf
der eine Masse sitzt. Siehe Abb. 3.
Scheinkr fte
Die Einheit der Winkelgeschwindigkeit ist Radiant/Zeit, d.h. rad/s.
Physik
dθ
ds ( rdθ )
=
=r
= rω
dt
dt
dt
2
v2
(rω )
=m
= mω 2 r
r
r
211
Für einen Beobachter auf der Scheibe ist der Körper in Ruhe und
wird nicht beschleunigt. Aus der Verlängerung der Feder muss er
schliessen, dass die Feder eine nach dem Kreiszentrum gerichtete
Kraft bewirkt. (Siehe Abb. 3C)
Die zum Kreiszentrum gerichtete Kraft wird von der Feder ausgeübt.
D.h., die Feder wird auseinandergezogen, wenn sich die Scheibe
dreht.
F=m
Für einen Beobachter im Inertialsystem (Siehe Abb. 3B) dreht sich
der Körper mit einer Geschwindigkeit v im Kreis und wird deshalb
zum Kreiszentrum beschleunigt. Der Betrag, der zum Kreiszentrum
gerichteten Kraft ist gleich
6.3.2 Die Zentrifugalkraft
wobei s die Bogenlänge ist.
v ( t) =
Die Winkelgeschwindigkeit ω entspricht dem überstrichenen Winkel
dθ in einer Zeit dt. Sie hat einen positiven Wert für Drehungen im
Gegenuhrzeigersinn (d.h. wenn θ grösser wird) und einen negativen
Wert für Drehungen im Uhrzeigersinn (d.h. wenn der Winkel θ
abnimmt).
C)
Feder
Masse
F
Rotierendes
Bezugssystem
Scheibe
Fs
Jeder Punkt auf der Scheibe bewegt sich auf einer Kreisbahn und
wird deshalb beschleunigt. Das Bezugssystem, das mit der Scheibe
verbunden ist, ist daher kein Inertialsystem.
Feder
Masse
B)
F
Scheibe
ω
Wenn der Körper sich bei einem Radius r befindet, ist seine
Geschwindigkeit gleich
θ (t)
ω
Die Masse, die relativ zur Scheibe ruht, ist über eine Feder mit dem
Mittelpunkt der Scheibe verbunden.
A)
Scheibe
Inertialsystem
Figur 3. Rotierende Scheibe A) Die Definition des Drehwinkels und der
Winkelgeschwindigkeit B) Drehung der Masse relativ zum Inertialsystem
C) Ruhezustand der Masse relativ zum rotierenden Bezugssystem.
Die Drehung der Scheibe um die Drehachse kann mit Hilfe des Drehwinkels θ beschrieben werden. Siehe Abb. 3A.
dθ ( t )
dt
Die Winkelgeschwindigkeit wird als die zeitliche Ableitung der
Winkelfunktion θ(t) definiert
ω ( t) ≡
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
212
Relativität
Weil die gesamte Kraft veschwinden muss, schliesst er daraus, dass
die Federkraft von einer fiktiven, nach aussen gerichteten Kraft, der
Zentrifugalkraft, kompensiert wird.
v2
= mω 2 r
r
Der Betrag der Zentrifugalkraft ist gleich
FZentrifugal ≡ m
Experiment. Konisches Pendel. Zentrifugalkraft hebt alle Kugeln auf
gleiche Höhe.
h
Konisches Pendel.
ω
α
r
li
S
mig
α
mi
FZ
Kugeln mit verschiedenen Massen mi werden an Seilen mit verschiedenen Längen li aufgehängt. Die Achse rotiert und es wird beobachtet, dass alle Massen in der gleichen Horizonalebene rotieren. Siehe
Abb. 4.
Figur 4.
Wir beobachten die Kugeln bezüglich eines rotierenden (nicht-inertialen) Koordinatensystems. In diesem System sind die Kugeln in
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
tan α =
g
ω2
r
FZ
r
m ω 2r ω 2r
=
=
r = i
h mi g
mi g
g
Ruhe. D.h., die resultierende Kraft muss verschwinden. Die
Gewichtskraft, die Spannung des Seils und die Zentrifugalkraft müssen einander kompensieren.
r
r
r
FZ + S + mi g = 0
Es gilt
und es folgt
h=
unabhängig von li und mi. Alle Massen rotieren in der gleichen
Ebene.
Experiment. Gras wächst gegen die Kräfte - Vektoraddition von Erdgravitation und Zentrifugalkraft.
6.3.3 Die Corioliskraft
Eine zweite Scheinkraft (die sogenannte Corioliskraft) hängt von
der Geschwindigkeit des Körpers ab. Sie wirkt senkrecht zur
Geschwindigkeitsrichtung des Körpers (relativ zum rotierenden
Bezugssystem) und führt zu einer seitlichen Ablenkung.
213
Eine Corioliskraft spürt z.B. eine Masse, die sich auf der Scheibe
nach innen oder nach aussen bewegt.
Physik
214
Relativität
Experiment. Corioliskraft. Spur der rollenden Kugel auf Brett mit
Drehstuhl.
Das Brett ist am Drehstuhl befestigt. Zur Zeit t=0 wird eine
Stahlkugel im rotiereden System losgelassen. Sie beschreibt
eine gekrümmte Bahn.
ω
B)
Masse
Scheibe
FCoriolis
Wir betrachten den Fall, in dem eine Masse nach aussen geworfen
wird. In einem Inertialsystem bewegt sich die Masse geradlinig. Im
rotierenden Bezugssystem wird die Bahnkurve infolge der Corioliskraft gekrümmt. Siehe Abb. 5.
A)
Masse
Scheibe
Inertialsystem
Rotierendes
Bezugssystem
Figur 5. A) In einem Inertialsystem bewegt sich die Masse geradlinig. B) Im
rotierenden Bezugssystem wird die Masse nach rechts abgelenkt. Die
Scheinkraft heisst Corioliskraft.
Wir unterteilen die gekrümmte Bewegung der Masse in kleine differentielle Strecken dR.
ds = ( dθ )( dR) = (ωdt)( dR)
Die Ablenkung ds ist gleich (Siehe Abb. 6)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
dθ
ds
dθ=ω(dt)
Berechnung der Corioliskraft.
dR
ds = (ωdt)(vdt) = ωv ( dt)
2
Die Strecke dR ist gleich dR=vdt, wobei v die radiale Geschwindigkeit ist. Es gilt
Figur 6.
1
a
(dt) 2
2 Coriolis
Für eine gleichförmig beschleunigte Bewegung mit Beschleunigung
aCoriolis gilt
ds =
Daraus folgt, dass der Betrag der Coriolisbeschleunigung
aCoriolis = 2ωv
215
ist, wobei ω die Winkelgeschwindigkeit der Drehung und v die
radiale Geschwindigkeit der Masse im rotierenden System ist.
Experiment. Corioliskraft. Schuss vom Drehstuhl.
Physik
216
Relativität
Treffer
Rechtsabweichung
Linksabweichung
Wir betrachten eine Pistole, die im Rotationszentrum eines rotierenden Systems dreimal abgefeuert wird.
ω = 0:
ω > 0:
ω < 0:
2
Wenn s<<R, wobei s die Abweichung und R der Abstand der Pistole
ist, ist die Abweichung gleich
2
1
1
R ωR
=
s ≈ aCoriolist 2 = (2vω )
v
2
2
v
wobei v die Geschwindigkeit der abgeschossenen Kugel ist.
6.3.4 Die Erde als ein Nicht-Inertialbezugssystem
Die Erde dreht sich um ihre Achse. Die Periode der Drehung ist
gleich
1 Sterntag = 8, 616 × 10 4 Sekunden
Infolge der Rotationsbewegung der Erde bewegen sich alle Punkte
auf der Erdoberfläche in gleichförmiger Kreisbewegung mit einer
Winkelgeschwindigkeit
2π
ω=
= 7, 292 × 10 −5 rad / s
T
Obwohl die Winkelgeschwindigkeit klein ist, ist sie bemerkbar durch
die messbaren Zentrifugal- und Corioliskräfte. Siehe Abb 7.
Der Winkel λ wird als geographische Breite bezeichnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
Wenn sich die Erde um die NS-Achse dreht, beschreibt ein Punkt
einen Kreis mit dem Radius R, mit
R = r cos λ
ω
N
ω
S
R
r
λ
v
Geschwindigkeit eines Punktes auf der Erdoberfläche.
O
wobei r der Betrag des Ortsvektors ist (d.h. der Radius der Erde).
Figur 7.
v = ωR = ωr cos λ
217
Die Geschwindigkeit des Punktes auf der Erdoberfläche ist tangential
zum Kreis und parallel zur Äquatorebene. Ihr Betrag ist
d.h.
v ≈ 460 cos λ m / s ≈ 1650 cos λ Kilometer pro Stunde
Physik
218
Relativität
Der maximale Wert von v wird am Äquator erreicht und ist gleich
null an den Polen.
Eine Zentrifugalkraft und eine Corioskraft treten aufgrund der Erddrehung in allen Bezugssystemen auf, die mit der Erde verbunden
sind. Ein Bezugssystem, das bestimmte Koordinaten relativ zur Erdoberfläche besitzt, ist kein Intertialsystem!
Erdbeschleunigung. Wir betrachten einen Körper, der sich in Ruhe
relativ zur Erdoberfläche befindet. Wir wissen, dass der Körper
wegen der Gravitationskraft “nach unten” beschleunigt wird.
Unter der Annahme, dass die Erde homogen und kugelförmig ist,
wird die Gravitationskraft radial in Richtung zum Erdmittelpunkt zeigen. Infolge der Zentrifugalkraft weicht die Richtung der resultierenden Beschleunigung (die effektive Erdbeschleunigung) leicht von
der radialen Richtung ab.
aZ =
2
v 2 (ωr cos λ )
=
= ω 2 r cos λ
R
r cos λ
Der Betrag der Zentrifugalbeschleunigung ist gleich
Siehe Abb. 8.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
Figur 8.
O
ω
N
R
r
λ
aZcosλ
aZ
Äquatorialebene
Zentrifugalbeschleunigung infolge der Rotation der Erde.
Er ist sehr klein im Verhältnis zur Gravitationsbeschleunigung
g≈9,8m/s2:
aZ = ω 2 r cos λ ≈ 3, 34 × 10 −2 cos λ m / s2
g ≈ g0 − az cos λ = g0 − ω 2 r cos2 λ
219
Für praktische Anwendungen können wir jedoch annehmen, dass die
Vertikale mit der radialen Richtung zusammenfällt. Die Grösse der
effektiven Erdbeschleunigung g ist etwas geringer als die Gravitationsbeschleunigung g0. Sie kann ungefähr als
Physik
220
Relativität
ausgedrückt werden. Einige Werte für die effektive Erdbeschleunigung sind in Tabelle 1 gezeigt.
Paris
Anchorage (Alaska)
Nordpol
Ort
0°0’
8°55’
48°50’
61°10’
90°0’
Breitengrad
9,7799
9,7822
8,8094
9,8218
9,8321
g (m/s2 )
für die effektive Erdbeschleunigung.
Panama
TABLE 1. Werte
Äquator
Corioliseffekt. Wenn sich ein Körper in einer horizontalen Ebene auf
der Erdoberfläche bewegt, führt die Coriolisbeschleunigung auf der
nördlichen Hemisphäre zu einer leichten Rechtsabweichung der Bahn
und zu einer Linksabweichung auf der südlichen Hemisphäre.
Der Corioliseffekt ist an den Polen maximal und am Äquator null.
Corioliskräfte sind vor allem für das Verständnis des Wetters von
grosser Bedeutung.
Wenn sich in der Atmosphäre ein Tiefdruckzentrum entwickelt, wird
der Wind radial zum Zentrum fliessen. Die Coriolisbeschleunigung
lenkt in der nördlichen Hemisphäre nach rechts ab, was zu einer
Bewegung der Wolken gegen den Uhrzeigersinn führt.
Siehe Abb. 9.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Scheinkr fte
Figur 9. Wirbel des Windes um ein Tiefdruckgebiet dreht auf der
nördlichen Halbkugel gegen den Uhrzeigersinn.
Als zweites Beispiel für den Corioliseffekt betrachten wir die
Schwingung eines Pendels.
221
Wenn die Schwingungsamplitude gering ist, können wir annehmen,
dass die Bewegung der Pendelmasse eine horizontale Bahn
beschreibt.
Physik
222
Relativität
Wegen der Coriolisbeschleunigung rotiert die Schwingungsebene des
Pendels auf der nördlichen Hemisphäre im Uhrzeigersinn, und auf
der südlichen gegen den Uhrzeigersinn. Siehe Abb. 10.
Experiment. Das Foucault Pendel.
J.L. Foucault hat dieses Experiment 1851 erstmals mit einem Pendel
der Masse 28kg und der Fadenlänge 70m im Pantheon von Paris vorgeführt.
Mit einem solchen Experiment wurde eine direkte Prüfung der Erdumdrehung erreicht. Man beweist, dass die Ebene der Pendelbewegung als Folge der Erdumdrehung sich dreht.
Figur 10. Rotation der Schwingungsebene eines Pendels infolge der
Coriolisbeschleunigung (auf der nördlichen Halbkugel). Auf der südlichen
Halbkugel ist die Rotation entgegengesetzt gerichtet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Galileische Transformation
6.4 Die Galileische Transformation
Wir betrachten zwei Beobachter O und O’, die sich relativ zueinander
mit konstanter Geschwindigkeit V bewegen.
Weil die zwei Beobachter sich relativ zueinander mit konstanter
Geschwindigkeit bewegen, gilt (siehe Abb. 2):
r
r
R( t) = Vt
Es folgt
r
r
r
r ′ ( t′ ) = r ( t) − Vt
Die Beziehung zwischen der Geschwindigkeit und der Beschleunigung, die beide Beobachter messen, kann leicht gefunden werden
r
r
r
r
r
r
dr ′ ( t′ ) r ( t) − Vt r ( t) r r
v ′ ( t′ ) =
=
=
− V = v ( t) − V
dt′
dt
dt
d.h., die Galileische Transformation für die Geschwindigkeit ist
r r r
v′ = v − V
223
Diese Gleichung führt auf die gewöhnliche Vektoraddition der
Geschwindigkeiten. Dieser Begriff ist uns aus dem Alltag vertraut.
Für die Beschleunigung gilt
r r
r
r
r
r
dv ′ ( t′ ) v ( t) − V v ( t) V ( t) r
a ′ ( t′ ) =
=
=
−
= a ( t)
dt′
dt
dt
dt
Physik
224
Relativität
Beide Beobachter messen dieselbe Beschleunigung. Wir sagen, dass
die Beschleunigung eine Invariante der Galileischen Transformation
ist.
Das folgende Gesetz folgt daraus:
Alle Bezugssysteme, die über die Galileische Transformation
eines Inertialssystems gefunden werden, sind ebenfalls Inertialsysteme.
Beispiel: Wir stellen uns z.B. eine Person vor, die sich auf einem
Eisenbahnwaggon bewegt
r
v PW = Geschwindigkeit der Person relativ zum Waggon
r
vWE = Geschwindigkeit des Waggons relativ zur Erdoberfläche
vWE
Vektoraddition der Geschwindigkeit.
vPW
vPE
vPW
vWE
Die Geschwindigkeit der Person relativ zur Erdoberfläche ist die Vektorsumme dieser beiden Geschwindigkeiten
r
r
r
v PE = v PW + vWE
Figur 11.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Galileische Transformation
6.4.1 Komponentendarstellung
Da der Geschwindigkeitsvektor V konstant ist, können wir die Koordinatensysteme so wählen, dass sich der Beobachter O’ in positiver
Richtung der x-Achse des Bezugssystems O bewegt.
y
Vt
z'
O'
y'
x,x'
Die Beobachter O und O’ mit einer Relativgeschwindigkeit V.
O
Wir betrachten zusätzlich den Fall, in dem die Ursprünge der Bezugssysteme O und O’ zu den Zeiten t=t’=0 zusammenfallen und die
Koordinatenachsen immer parallel bleiben, da keine relative Rotation
stattfindet. Siehe Abb. 12.
z
Figur 12.
In diesem Fall wird die Geschwindigkeit geschrieben als
r
r
V = Vex = (V , 0, 0)
225
Die Ortsvektoren können als Funktion ihrer Komponenten ausgedrückt werden
r
r
r = ( x, y, z )
und r ′ = ( x ′, y ′, z′ )
Physik
226
Relativität
Der Übergang von einem Bezugssystem ins andere wird mit Hilfe der
Galileischen Transformation geschrieben.
Galileische Transformation
Für den Übergang von O nach O’ gilt das folgende Gleichungssystem
x ′ = x − Vt
y′ = y
z′ = z
t′ = t
0
1
0
0
0
0
1
0
0 t
0 x
0 y
1 z
Matrixdarstellung
Es kann auch als eine Matrizengleichung ausgedrückt werden
t′ 1
x ′ −V
=
y ′ 0
z′ 0
6.4.2 Das Ereignis
Wir definieren ein Ereignis als etwas, das an einem bestimmten
Punkt des Raums und zu einer bestimmten Zeit stattfindet.
D.h., ein Ereignis findet in einen Punkt mit bestimmten Raumkoordinaten x,y,z und zu einer bestimmten Zeit t statt.
Der Zusammenstoss zwischen zwei Körpern ist z.B. ein Ereignis. Ein
anderes Ereignis besteht darin, dass eine Lampe einen Lichtblitz
emittiert. Ein drittes Ereignis ist der Aufprall eines Steines, durch den
die Windschutzscheibe eines Autos beschädigt wird.
Jedes Ereignis ist eine reale Gegebenheit.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Galileische Transformation
Man sagt, dass ein Ereignis an einer bestimmten Stelle in der Raumzeit stattfindet.
Ein dreidimensionaler Ortsvektor stellt einen Punkt im Raum dar,
r
r = ( x, y, z )
( t, x, y, z) ≡ ein bestimmter Punkt in der Raumzeit
Ein Ereignis wird mit einem vierdimensionalen 4-Vektor in der
Raumzeit dargestellt
Wir sagen, dass ein Ereignis einem Punkt in der vierdimensionalen
Raumzeit entspricht.
Wir bemerken, dass die erste Komponente (d.h. die Zeit) und die
anderen drei Komponenten (d.h. die Raumkoordinaten) des 4-Vektors
verschieden sind.
Wir können die Zeit auch mit der Einheit der Länge messen.
Wir lassen z.B. einen Lichtstrahl zwischen zwei parallelen Spiegeln,
die 0,5 Meter voneinander entfernt sind, hin und her laufen. Eine solche Anordnung können wir als eine “Uhr” verwenden, die jedesmal
“tickt”, wenn der Strahl zu einem bestimmten Spiegel zurückkehrt.
Damit alle Komponenten des 4-Vektors dieselbe Einheit besitzen,
definieren wir die erste Komponente (d.h. die Zeitkomponent) als das
Produkt der Zeil t (in Sekunde) mal der Lichtgeschwindigkeit c (in
Meter/Sekunde) und erhalten ct (in Meter).
227
Wir benutzen die Lichtgeschwindigkeit, weil sie die einzige
fundamentale Konstante in der Natur ist, die die nötige Einheit zur Umwandlung einer Zeit in eine Länge hat.
Physik
228
Relativität
(µ = 0,1, 2, 3)
Der Raumzeit 4-Vektor wird dann geschrieben als
xµ ≡
= ( x 0 , x1, x 2 , x 3 )
= (ct, x, y, z)
wobei der Index µ über die 4 Komponenten des Vektors läuft.
Mit dieser Definition besitzen die vier Komponenten des 4-Vektor
dieselbe Einheit, d.h. die Einheit einer Länge (z.B. Meter).
µ
x ′ µ = MG x µ
Die Galileische Transformation kann dann als die Transformation der
4-Vektoren
ausgedrükt werden, wobei
µ
Beide entsprechen demselben Ereignis
x = (ct, x, y, z)
x ′ = (ct′, x ′, y ′, 3
z′ )
1
4
4
2
44
3
1
44
4
2
444
Raumzeitkoordinaten für O
für O ′
1
44444442Raumzeitkoordinaten
4444444
3
(Wir haben angenommen, dass die Konstante c dieselbe ist für beide
Beobachter.)
MG ist eine Matrix, die die Galileische Transformation darstellt.
Beide, xµ und x’µ, entsprechen demselben Ereignis, aber von verschiedenen Beobachtern O und O’ beobachtet.
Im Allgemeinen haben wir mit dieser Form angenommen,
dass verschiedene Beobachter dasselbe Ereignis mit verschiedenen Raumkoordinaten und Zeiten beschreiben.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Galileische Transformation
ct′ 1
x ′ −V / c
=
y′ 0
z′ 0
0
1
0
0
0
0
1
0
0 ct
0 x
0 y
1 z
Im Fall der Galileischen Transformation gilt
und
x′µ
M G (β )
xµ
ct′ 1 0 0 0 ct
x ′ −β 1 0 0 x
=
y ′ 0 0 1 0 y
z′ 0 0 0 1 z
{ 1442443 {
Wir haben den Geschwindigkeitsparameter β definiert
β ≡ V /c
wobei V die Geschwindigkeit des Beobachters O’ relativ zu O, und c
die Lichtgeschwindigkeit ist.
x = x ′ + Vt = x ′ + βct
y = y′
z = z′
t = t′
Galileische Transformation
229
Die inversen Galileischen Transformationen von O’ nach O lauten
Physik
230
Relativität
und
xµ
ct 1
x β
=
y 0
z 0
{
0
1
0
0
0
0
1
0
x′µ
0 ct′
0 x ′
0 y ′
1 z′
{
6.5 Bestimmung der
Ausbreitungsgeschwindigkeit einer
Welle
Wir betrachten die Ausbreitungsgeschwindigkeit einer longitudinalen
Federwelle, die sich von links nach rechts ausbreitet.Siehe Abb. 13.
Um die Ausbreitungsgeschwindigkeit zu bestimmen, messen wir die
Zeit, die die Welle benötigt, um einen Stab zu passieren.
Beobachter in Ruhe. Wir beginnen mit dem Fall, in dem der Beobachter relativ zur Feder in Ruhe ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
x
x2µ=(ct2,x2)
Bestimmung der Ausbreitungsgeschwindigkeit einer Welle
x1µ=(ct1,x1)
Figur 13. Messung der Ausbreitungsgeschwindigkeit von einer
longitudinalen Federwelle, die sich von links nach rechts ausbreitet. Die
Zeit, die die Welle benötigt, um den Stab zu passieren, wird gemessen.
Beide Beobachter sind relativ zur Feder in Ruhe.
Wir definieren zwei Ereignisse, x1µ und x2µ:
x1µ = (ct1, x1, y1, z1 ) = Wellenberg trifft den Stab an
µ
x 2 = (ct2 , x 2 , y 2 , z2 ) = Wellenberg verlässt den Stab
(in diesem Fall sind nur die Zeit und die x-Koordinate wichtig)
Die gemessene Ausbreitungsgeschwindigkeit vA wird bestimmt mit
x −x
x −x
2
1
=c 2 1
ct2 − ct1
t2 − t1
231
Hilfe der Raumzeitkoordinaten der zwei Ereignisse x1µ=(ct1,x1,y1,z1)
vA =
und x2µ=(ct2,x2,y2,z2) als
Physik
232
Relativität
Bewegter Beobachter. Wir betrachten nun den Fall, in dem der
Beobachter O’ sich relativ zur Feder mit konstanter Geschwindigkeit
V (d.h. mit einem Geschwindigkeitsparameter β=V/c) bewegt. Siehe
Abb. 14.
Die Ausbreitungsgeschwindigkeit der Welle, gemessen bezüglich O’,
kann mit Hilfe einer Galileischen Transformation der Raumzeitkoordinaten bezüglich O berechnet werden.
Wir benutzen die Koordinaten der zwei Ereignisse bezüglich O und
O’. x1µ und x1’µ entsprechen demselben Ereignis, aber bezüglich den
zwei Bezugssystemen der zwei Beobachter O und O’. Eine ähnliche
Beziehung gilt zwischen x2µ und x2’µ .
x2µ=(ct2,x2)
x
x1µ=(ct1,x1)
x'2µ=(ct'2,x'2)
Beobachter O
x'1µ=(ct'1,x'1)
v
Beobachter O'
Figur 14. Messung der Ausbreitungsgeschwindigkeit von einer
longitudinalen Federwelle, die sich von links nach rechts ausbreitet. In
diesem Fall bewegt sich der Beobachter relativ zur Feder nach rechts.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bestimmung der Ausbreitungsgeschwindigkeit einer Welle
Die Ausbreitungsgeschwindigkeit vA’ bezuglich O’ ist gleich
x 2 − x1 βc ( t2 − t1 )
−
t2 − t1
t2 − t1
x 2 − x1 − β (ct2 − ct1 )
t2 − t1
2
x′ − x′
vA ′ = 2 1
t2′ − t1′
x − βct2 − x1 + βct1
t2 − t1
=
=
=
= vA − V
wobei wir die gemessene Grösse vA’ bezüglich O’ als Funktion der
Grössen, die bezüglich O gemessen sind, ausgedrückt haben.
x
x1µ=(ct1,x1)
233
D.h., wenn er sich in dieselbe Richtung wie die Welle bewegt,
schliesst der Beobachter O’, dass sich die Welle mit der geringeren
Geschwindigkeit vA’ =vA–V ausbreitet.
x2µ=(ct2,x2)
x'2µ=(ct'2,x'2)
Beobachter O
x'1µ=(ct'1,x'1)
v
Beobachter O'
Figur 15. Messung der Ausbreitungsgeschiwndigkeit von einer
longitudinalen Federwelle, die sich von links nach rechts ausbreitet. In
diesem Fall bewegt sich der Beobachter nach links relativ zur Feder.
Physik
234
Relativität
Mit einer ähnlichen Herleitung kann man beweisen, dass wenn sich
der Beobachter O’ der Welle entgegengesetzt bewegt, die Welle sich
für ihn mit der grösseren Geschwindigkeit vA’ =vA+V ausbreitet.
Daraus folgt, dass
die beobachtete Ausbreitungsgeschwindigkeit der Welle von
der Geschwindigkeit der Beobachter relativ zum Medium,
durch welches sich die Welle ausbreitet, abhängt. Sie ist
gleich vA–V wenn sich der Beobachter in dieselbe Richtung
wie die Welle bewegt und vA+V wenn er sich der Welle entgegengesetzt bewegt.
6.6 Bestimmung der
Lichtgeschwindigkeit
laser pulse
laser
Die Lichtgeschwindigkeit kann mit Hilfe eines Laserpulses gemessen
werden. Wie früher messen wir die Zeit, die der Laserpuls benötigt,
um einen Stab zu passieren. Siehe Abb. 16.
Figur 16. Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um den Stab zu passieren, wird gemessen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bestimmung der Lichtgeschwindigkeit
Wir definieren die zwei Ereignisse
x1µ = (ct1, x1, y1, z1 ) = Licht passiert den ersten Empfänger
µ
x 2 = (ct2 , x 2 , y 2 , z2 ) = Licht passiert den zweiten Empfänger
x 2 − x1
t2 − t1
In diesem Fall wird die Lichtgeschwindigkeit c gemessen als
c=
Wir bemerken nun, dass die Ausbreitung des Lichtes verschieden von
der Ausbreitung mechanischer Wellen ist:
Alle mechanischen Wellen benötigen ein Medium, um sich
ausbreiten zu können, und die Geschwindigkeit der Wellen
wird durch die Eigenschaften des Mediums bestimmt.
Seit dem 19. Jahrhundert wusste man, dass das Licht sich wie Lichtwellen (elektromagnetische Wellen) verhält, durch die Beobachtung
von Phänomenen wie optische Interferenz, Beugung und Polarisationseffekte.
Lichtwellen können sich aber durch den leeren Raum (d.h.
Vakuum) ausbreiten. Sie brauchen kein Medium, durch welches sie sich ausbreiten müssen.
1
≈ 3 × 10 8 Meter / Sekunde
ε 0µ 0
235
Nach der Maxwellschen1 Theorie des Elektromagnetismus (Siehe
Kap. 11) ist die Ausbreitungsgeschwindigkeit von elektromagnetischen Wellen gleich
c=
1. James C. Maxwell (1831-1879)
Physik
236
Relativität
wobei ε0 und µ0 die Dielektrizitäts- und Permeabilitätskonstante
im Vakuum sind.
Die Maxwellsche Gleichung liefert aber keine Aussage, in
welchem Bezugssystem die Lichtgeschwindigkeit diesen Wert
annimmt!
laser
Eine Messung der Lichtgeschwindigkeit in einem Bezugssystem, das
sich bewegt, müsste ein grösseres oder kleineres Ergebnis liefern, je
nach Richtung der Bewegung relativ zum Lichtstrahl. Siehe Abb. 17
und 18.
laser pulse
Figur 17. Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um der Stab zu passieren, wird gemessen. Der Beobachter, der
den Stab hält, bewegt sich in Richtung des Beobachters, der den Laser hält.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bestimmung der Lichtgeschwindigkeit
laser pulse
laser
Figur 18. Messung der Lichtgeschwindigkeit. Die Zeit, die der Laserpuls
benötigt, um der Stab zu passieren, wird gemessen. Der Beobachter, der
den Stab hält, entfernt sich vom Beobachter, der den Laser hält.
Galileische Transformation
6
474
8
=
Wenn wir die Galileische Transformation benutzen, werden wir
schliessen, dass die gemessene Lichtgeschwindigkeit wie folgt sein
müsste,
gemessene Lichtgeschwindigkeit
c − V in derselben Richtung
c + V in entgegengesetzter Richtung
6.6.1 Das Michelson-Morley Experiment
237
Im Jahr 1881 begann Michelson, die Lichtgeschwindigkeit mit Hilfe
von Laufzeitmessungen des Lichts zu messen.
Physik
238
In einer Serien von Experimenten versuchten Michelson und Morley
die Abhängigkeit der Lichtgeschwindigkeit vom Bewegungszustand
des Bezugssystems aufzudecken.
Relativität
Wenn sich Lichtquelle und Spiegel mit einer Geschwindigkeit V in
gleicher Richtung bewegen, dann sollte sich das Licht mit der
Geschwindigkeit c–V auf den Spiegel zubewegen und mit der
Geschwindigkeit c+V von ihm wegbewegen. Siehe Abb. 20.
Die Lichtstrahlen wurden zwischen nahezu parallelen Spiegeln hin
und her reflektiert.
Bestimmung der Lichtgeschwindigkeit
Physik
L
L
L(c + V ) + L(c − V )
2 Lc
= 2
+
=
c −V c +V
c2 − V 2
c (1 − V 2 / c 2 )
t=
−1
2L
(1 − V 2 / c 2 ) ≈ 2cL (1 + V 2 / c 2 )
c
2
V 2 / c 2 ≈ (10 −4 ) = 10 −8
L
c–V
c+V
Spiegel
239
Geschwindigkeit V
Figur 20. Eine Lichtquelle und ein Spiegel, die sich mit konstanter
Geschwindigkeit V bewegen.
Lichtstrahl
Der Effekt ist sehr klein und daher auf direktem Weg sehr schwer
nachzuweisen.
wobei
Für V≈3x104 m/s viel kleiner als c≈3x108 m/s gilt
t=
Die gesamte Laufzeit des Lichts ist daher
Sie benutzten die Erde als bewegtes Bezugssystem: die Erde dreht
sich mit einer Geschwindigkeit von ungefähr 30x103 Metern pro
Sekunde um die Sonne.
Sie verglichen die Zeiten, die Licht benötigt, um dieselbe
Strecke parallel und senkrecht zur Bewegungsrichtung der
Erde zurückzulegen.
Das Michelson-Morley Interferometer.
Siehe Abb. 19.
Figur 19.
Wir betrachten die Lichtstrahlen, die sich parallel zur Richtung der
Erde bewegen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
240
Relativität
Bestimmung der Lichtgeschwindigkeit
um die Sonne in die entgegengesetzte Richtung bewegt, aber
mit demselben Ergebnis.
Dieses Experiment wurde unter verschiedenen Bedingungen wiederholt, aber das Ergebnis ist immer dasselbe: keine Änderung des Interferenzmusters wird beobachtet.
Um diese kleine Differenz zu bestimmen, verwendeten Michelson
und Morley ein Interferometer.
Wie in Abb. 19 gezeigt, fällt das Licht auf einen Strahlteiler. Ein Teil
des Lichts geht in die Richtung parallel zur Erdbewegung und ein
anderer Teil wird um 90° reflektiert. Die beiden Teile werden reflektiert und werden schliesslich wieder zusammentreffen.
Das Null-Resultat des Michelson-Morley-Experiments kann mit
Hilfe des Postulats der Lichtgeschwindigkeit erklärt werden. Es sagt:
Physik
241
O1 misst eine Lichtgeschwindigkeit c. O2 misst auch eine Lichtgeschwindigkeit c (nicht c+V).
Dieses Postulat scheint vielleicht im Widerspruch zu unserer
Anschauung. Wir betrachten z.B. zwei Beobachter O1 und O2 und
eine Lichtquelle S. O1 befindet sich relativ zu S in Ruhe, und O2
bewegt sich mit der Geschwindigkeit V auf S zu. Siehe Abb. 21.
D.h., die Lichtgeschwindigkeit ist isotrop (gleich in alle Richtungen)
und unabhängig von der Bewegung des Beobachters.
Jeder Beobachter misst in allen Richtungen für die Lichtgeschwindigkeit im Vakuum denselben Wert c.
6.6.2 Das Postulat der konstanten Lichtgeschwindigkeit
Wegen des Prinzips der Superposition (siehe Kap. 5.3) der
elektromagnetischen Wellen, wird die resultierende Welle die
Summe der einlaufenden Wellen sein. Wenn beide Strecken
(d.h. parallel und senkrecht) zu einer Laufzeitdifferenz führen,
werden wir es durch Interferenzphänomene (siehe Kap 5.5)
zwischen den beiden Lichtstrahlen bemerken.
= 650 nm = 650 × 10 −9 m
≈ 0, 65 µm = 0, 65 × 10 −6 m
Für das menschliche Auge ist der elektromagnetische Wellenlängenbereich von ungefähr 0,4µm bis 0,7µm beobachtbar (der sichtbare
Spektralbereich). Die rote Farbe hat z.B. eine Wellenlänge ungefähr
gleich
λ
rot
Es folgt daraus, dass mit einer Laufzeitdifferenz-Messung, durchgeführt mit einem Interferometer und sichtbarem Licht, räumliche Phasenunterschiede im Bereich von µm gemessen werden können.
Die Anwesenheit einer solchen Laufzeitdifferenz wollten Michelson
und Morley mit der Änderung des Interferenzmusters, wenn das
Experiment um 90° gedreht wird, beweisen.
Bei seinem ersten Versuch im Jahr 1881 hat Michelson keinen Effekt beobachtet. Er wiederholte seine Messungen
nach einem halben Jahr, da sich die Erde auf ihrer Bahn
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
242
Relativität
Lichtquelle S
V
O1
O2
Figur 21. Eine ruhende Lichtquelle S, ein ruhender Beobachter O1, und ein
sich mit der Geschwindigkeit V in Richtung der Quelle bewegender
Beobachter O2.
Wir bemerken, dass die Lichtgeschwindigkeit c eine fundamentale
Grösse in der Natur ist. Sie wirkt als eine Grenzgeschwindigkeit, die
der höchsten möglichen Geschwindigkeit entspricht (Siehe
Kap. 3.2.1).
Eine vernünftige Annahme ist, dass diese fundamentale Grösse c dieselbe für alle Beobachter sein muss, unabhängig von ihrem Bewegungszustand.
6.7 Die Lorentz-Transformation
Das Postulat der Lichtgeschwindigkeit ist im Widerspruch zur Vektoraddition der Geschwindigkeit, die eine Folgerung der Galileischen
Transformation ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Lorentz-Transformation
D.h., die Galileische Transformation entspricht einer Näherung, die
nur gilt, wenn die Geschwindigkeiten viel kleiner als die Lichtgeschwindigkeit sind.
Wir suchen eine neue Transformation. Wir nehmen an, dass die Galileische Transformationsgleichung für x bis auf einen Faktor K gilt
x = K ( x ′ + βct′ )
wobei K von V und c (d.h. vom Geschwindigkeitsparameter β) abhängen kann, aber nicht von den Koordinaten.
Die inverse Transformation ist dann
x ′ = K ( x − βct)
Wir betrachten einen Lichtpuls, der im Ursprung vom Beobachter O
zur Zeit t=0 emittiert wird. Wir nehmen gewöhnlich an, dass die
Ursprünge von O und O’ für t=t’=0 zusammenfallen. Es folgt, dass
der Lichtpuls auch in O’ zum Zeitpunkt t=0 startet.
bezüglich O:
bezüglich O′:
x = ct
x ′ = ct′
ct = K (ct′ + βct′ ) = K (1 + β )ct′
ct′ = K (ct − βct) = K (1 − β )ct
243
Nach dem Postulat der Lichtgeschwindigkeit muss die Gleichung für
die x-Komponente des Lichtpulses in O und O’ gleich lauten:
Wir erhalten
Physik
244
Relativität
und
1 = K (1 − β )K (1 + β )
⇒ K2 =
1− β 2
1
1
1− β 2
Deshalb muss die Konstante K gleich dem Lorentz-Faktor sein
(Siehe Kap. 3.2.2), d.h. K=γ, wobei,
γ ≡
Wir erinneren daran, dass γ immer grösser als 1 ist und γ ≈ 1 für
β<<1 oder V<<c.
1
K 2 x ′ (1 − 2 ) + βct′
K
Kβ
= K 2 x ′ + K 2βct′ − Kβct
x ′ = K ( x − βct) = K (K ( x ′ + βct′ ) − βct)
Die Transformationsgleichung für die Zeit ist
und deshalb
K 2 ( x ′ + βct′ ) − x ′
=
Kβ
x ′ = K 2 ( x ′ + βct′ ) − Kβct
⇒ ct =
1
1
= K x ′ (1 − 2 ) + ct′
K
β
Mit der Definition von K = γ = 1 ⁄ ( 1 – β 2 ) finden wir
1
1
1
(1 − 2 ) = (1 − (1 − β 2 )) = β
β
β
K
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Lorentz-Transformation
und schliesslich erhalten wir für die Zeittransformation
ct = γ (βx ′ + ct′ )
Lorentz − Transformation
Die sogenannten Lorentz Transformationen für den Raum und die
Zeit folgen daraus
x ′ = γ ( x − βct)
y ′ = y
z ′ = z
ct′ = γ (ct − βx )
oder mit einer Matrixdarstellung
x′µ
M Lorentz ( β )
xµ
−γβ 0 0 ct
ct′ γ
x ′ −γβ γ
0 0 x
=
0 1 0 y
y′ 0
0 0 1 z
z′ 0
{ 14442444
3{
Mit dieser Darstellung ist eine Symmetrie zwischen Raum und Zeit
bemerkbar.
β ↔ −β; x ↔ x ′; y ↔ y ′; z ↔ z′; t ↔ t′
Die inverse Transformation können wir durch den folgenden Austauch
finden.
245
Die Lorentz Transformation erfüllt das Postulat der Lichtgeschwindigkeit.
Physik
246
Relativität
Sie stellt eine Beziehung her zwischen den Raum- und Zeitkoordinaten eines Ereignisses in einem Bezugssystem O und den
Koordinaten desselben Ereignisses in einem anderen Bezugssystem O’, das sich mit der Geschwindigkeit βc relativ zu O
bewegt.
Bemerkung. Für Geschwindigkeiten viel kleiner als die Lichtgeschwindigkeit vereinfachen sich die Lorentz-Transformationen zu
den Galileischen Transformationen.
Es gilt im Fall V<<c (d.h. β<<1 und γ≈1)
Die spezielle Relativit tstheorie
“Man kann eine geradlinige Bewegung mit konstanter
Geschwindigkeit nicht fühlen.”
Wir stellen uns z.B. vor, dass wir in einem Flugzeug sind.
Das Flugzeug bewegt sich mit einer Geschwindigkeit von ungefähr
1000 Kilometer pro Stunde.
Wir sitzen im Flugzeug und schauen einen Film. Wenn die Fenster
des Flugzeugs geschlossen sind, können wir die Höhe der Geschwindigkeit nicht fühlen. Falls wir unser Getränk verschütten, wird es auf
unsere Beine fallen, wie wenn wir auf der Erdoberfläche sitzen würden.
Aus den verschiedenen Dingen, die im Flugzeug geschehen,
oder aus allen Experimenten, die wir im Flugzeug machen
können, ist es unmöglich ganz sicher zu schliessen, ob das
Flugzeug sich wirklich mit konstanter Geschwindigkeit
bewegt oder nicht.
In einigen Fällen kann es logischer sein anzunehmen, dass das Flugzeug sich in Ruhe befindet, und die Erde als bewegtes System zu
betrachten. Siehe Abb. 22.
V
x ′ = γ ( x − βct) ≈ x − ct ≈ x − Vt
c
y′ = y
z′ = z
ct′ = γ (ct − βx ) ≈ ct − V x ≈ ct
c
und wir erhalten die Galileischen Transformationen wieder.
In welchem Fall können wir sicher schliessen, dass wir uns bewegen?
Physik
247
Wenn wir scharf anfahren oder bremsen, oder wenn wir um eine
scharfe Kurve fahren, fühlen wir die Beschleunigung. Die Änderung
der Richtung oder des Betrages der Geschwindigkeit können wir
fühlen!
6.8 Die spezielle Relativitätstheorie
Der Name Relativitätstheorie wird gewählt, um die Unabhängigkeit
der Naturgesetze vom Bewegungszustand des Beobachters auszudrücken.
6.8.1 Prinzip der Relativität
Das Prinzip der Relativität ist uns nicht fremd. Es sagt:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
248
Relativität
Flugzeug
de
h
G
en Zü
f ric
Flugzeug
Er
Bewegung des Flugzeugs oder der Erde.
Erde
Zürich
Genf
Figur 22.
Aber wenn es keine Beschleunigung gibt und wir uns geradlinig mit
konstanter Geschwindigkeit bewegen, können wir nie sagen, ob wir
uns wirklich bewegen oder nicht.
Das Prinzip der Relativität kann ausgedrückt werden als:
Alle relativ zu einem Inertialsystem gleichförmig bewegten
Bezugssysteme sind ebenfalls Inertialsysteme und im Rahmen
der Mechanik gleichwertig.
D.h., es ist nicht möglich, durch die Überprüfung der physikalischen
Gesetze ein frei bewegtes Bezugssystem vom anderen zu unterscheiden.
Es folgt daraus, dass es in der Natur keine absolute Geschwindigkeit
gibt. Bewegung ist wirklich ein relativer Begriff!
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
6.8.2 Die Einsteinschen Postulate
Im Jahr 1905 veröffentlichte Einstein (im Alter von 26 Jahren) seine
Arbeit “Über die Elektrodynamik bewegter Körper”, in der die spezielle Relativitätstheorie enthalten ist.
Die Theorie basiert auf zwei Postulaten:
1. Das Prinzip der Relativität gilt:
“Es gibt kein physikalisch bevorzugtes Inertialsystem. Die
Naturgesetze müssen in allen Inertialsystemen dieselbe Form
annehmen.”
1
≈ 3 × 10 8 Meter / Sekunde
ε 0µ 0
2. Die Maxwellsche Theorie des Elektromagnetismus gilt (in
allen Inertialsystemen):
“Die Ausbreitungsgeschwindigkeit des Lichts (allgemein der
elektromagnetischen Wellen) im Vakuum besitzt für jeden
beliebigen Inertialbeobachter denselben Wert c,
c=
wobei ε0 und µ0 die Dielektrizitäts- und Permeabilitätskonstante im Vakuum sind.
Es folgt, dass zwei verschiedene Beobachter, die sich relativ mit konstanter Geschwindigkeit V bewegen, ihre Beobachtungen des gleichen Ereignisses über die Lorentz-Transformation korrelieren
müssen.
249
Diese Postulate sagen Effekte unmittelbar voraus, die zunächst sonderbar, sogar unheimlich scheinen. Sonderbar oder nicht, werden sie
durch logische Argumente bewiesen und durch Experimente bestätigt!
Physik
250
Relativität
6.8.3 Invarianz des Raumzeit-Intervalls
Aus der Lorentz-Transformation folgen wichtige Effekte für Zeitintervalle und räumliche Entfernungen.
Wir betrachten zwei Ereignisse mit Raumzeitkoordinaten
x1µ=(ct1,x1,y1,z1) und x2µ=(ct2,x2,y2,z2) relativ zum Beobachter O.
Wir definieren die räumliche Entfernung (den Abstand) zwischen
den zwei Ereignisse als
2
2
∆r 2 = ( x 2 − x1 ) 2 + ( y 2 − y1 ) 2 + ( z2 − z1 ) 2
2
= ( ∆x ) + ( ∆y ) + ( ∆z)
Das Zeitintervall (die zeitliche Entfernung) ∆t zwischen den zwei
Ereignissen wird definiert als
∆t = t2 − t1
und
x 2′ µ = (ct2′ , x 2′ , y 2′ , z2′ )
Für einen anderen Beobachter O’ erscheinen die zwei Ereignisse im
Allgemeinen mit verschiedenen Raumzeitkoordinaten
x1′ µ = (ct1′ , x1′ , y1′ , z1′ )
2
1
Die spezielle Relativit tstheorie
und mit einer ähnliche Herleitung für das Zeitintervall, finden wir die
folgenden Gleichungen für die Transformation der Entfernungen ∆x,
∆y, ∆z und ∆t.
∆x ′ = γ ( ∆x − βc∆t)
∆y ′ = ∆y
∆z′ = ∆z
c∆t′ = γ (c∆t − β∆x )
Es folgt daraus, dass räumliche und zeitliche Entfernungen in verschiedenen Bezugssystemen unterschiedlich sind:
∆t ≠ ∆t′; ∆x ≠ ∆x ′ ⇒ ∆r ≠ ∆r′
D.h., von verschiedenen Beobachtern gemessene Zeitintervalle oder
räumliche Abstände zwischen zwei Ereignissen sind nicht immer
gleich.
2
2
2
2
2
Gibt es eine “Entfernung”, die dieselbe für alle Beobachter ist?
Das Raumzeit-Intervall ∆s wird definiert als
Physik
251
Wir beweisen nun, dass das Raumzeit-Intervall eine Invariante der
Lorentz-Transformation ist.
(das negative Vorzeichen für den Raum ist sehr wichtig!)
2
= (c∆t) − ( ∆x ) − ( ∆y ) − ( ∆z)
(∆s) 2 ≡ (c∆t) 2 − (∆r) 2
Wir bestimmen die räumliche und zeitliche Entfernung bezüglich O’.
Für die x-Koordinate gilt
Zeitliche Räumliche
−
=
Entfernung Entfernung
1
= γ ( x − x ) − γβ (ct − ct )
∆x ′ = x 2′ − x1′ = γ ( x 2 − βct2 ) − γ ( x1 − βct1 )
2
= γ ( ∆x − βc∆t)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
252
Relativität
2
2
2
2
2
2
2
2
2
− ( ∆x ) ) − ( ∆y )
2
2
2
2
− ( ∆z)
2
− ( ∆z)
2
2
2
2
2
D.h., jeder beliebige Beobachter misst im Allgemeinen eine verschiedene räumliche und zeitliche Entfernung, aber dasselbe RaumzeitIntervall zwischen zwei Ereignissen:
(∆s′ ) 2 = (c∆t′ ) 2 − (∆x ′ ) 2 − (∆y ′ ) 2 − (∆z′ ) 2
2
2
2
= (γ (c∆t − β∆x )) − (γ ( ∆x − βc∆t)) − ( ∆y ) − ( ∆z)
(
2
)
− 2βc∆t∆x + (β∆x ) ) −
− 2βc∆t∆x + (βc∆t) ) − ( ∆y )
((∆x)
= γ 2 (c∆t)
γ2
(
2
2
= γ 2 (c∆t) − (βc∆t) − ( ∆x ) + (β∆x ) − ( ∆y ) − ( ∆z)
=γ2
(1 − β )((c∆t)
2
= (c∆t) − ( ∆x ) − ( ∆y ) − ( ∆z)
= ( ∆s)
Man kann sagen, dass der Raum und die Zeit für veschiedene Beobachter unterschiedlich sind, aber die Raumzeit für alle gleich ist.
Die spezielle Relativit tstheorie
y
x
Die Rakete reist ohne Antrieb durch den Weltraum (d.h. sie wird nicht
beschleunigt) und sie spürt keine äussere Kraft, insbesondere keine
Gravitationskraft. Es folgt, dass die Rakete ein Inertialsystem ist.
O
∆x=∆y=0
∆t=Periode T
Figur 23. Das Raketenbezugssystem bewegt sich ohne Antrieb und frei
durch den Weltraum (es wirkt keine Gravitationskraft). Ein Beobachter O
misst die Schwingungsperiode T der Masse, die an der Feder angebunden
ist.
Ein Beobachter O befindet sich in der Rakete. Er lenkt die Masse in
die y-Richtung aus, und beobachtet die Schwingung der Masse.
Relativ zu einem zweiten Beobachter O’ bewegt sich die Rakete mit
einer Geschwindigkeit βc in die x’-Richtung, d.h. senkrecht zur Richtung der Schwingung.
6.8.4 Eigenzeit und Zeitdilatation
Wir betrachten nun die Bewegung einer Masse, die an einer Feder
angebunden ist.
Wir definieren zwei Ereignisse.
Physik
253
2. Ereignis: die Masse hat eine volle Schwingung durchgeführt.
1. Ereignis: die Masse wird losgelassen
Siehe Abb. 24.
Wir wissen schon (Siehe Kap. 4.1.3 und folgende), dass für eine nicht
zu grosse Anfangsauslenkung die Masse eine harmonische Schwingung ausführt.
Wir nehmen an, dass das Masse-Feder-System sich in einer Rakete
befindet und dass die Masse in der y-Richtung schwingen wird.
Siehe Abb. 23.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
254
Relativität
y'
O'
x'
Geschwindigkeit V
βc(∆t')
∆x'=βc(∆t')
∆y'=0
∆t'=gemessene Periode T'
Geschwindigkeit V
Figur 24. Relativ zum Beobachter O’ bewegt sich die Rakete mit einer
Geschwindigkeit βc in die x’-Richtung. Ein Beobachter O’ misst die
Schwingungsperiode T’ der Masse, die an der Feder angebunden ist.
Wir betrachten die Schwingung bezüglich O. Nach einer Schwingung
befindet sich die Masse wieder in ihrer Anfangsposition. Bezüglich O
ist die räumliche Entfernung zwischen den zwei Ereignissen gleich
null. Die zeitliche Entfernung entspricht der Periode T der Schwingung.
Die zeitliche Entfernung zwischen Ereignissen, die bezüglich
einem Bezugssystem am selben Ort stattfinden, heisst Eigenzeitintervall ∆τ.
Für den Beobachter O, der sich relativ zum Masse-Feder-System in
Ruhe befindet, ist das Eigenzeitintervall ∆τ gleich der Periode der
Schwingung.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
2
2
Das Raumzeit-Intervall zwischen den zwei Ereignissen ist für O
gleich
2
Eigenzeit
2
zeitliche zeitliche
−
(∆s) 2 =
Entfernung Entfernung
2
= (c × ( Periode T )) − (0)
≡ (c∆τ )
2
2
2
2
2
2
Bezüglich dem Beobachter O’ bewegt sich die Rakete. Der Beobachter O’ bestimmt das Raumzeit-Intervall zwischen den zwei Ereignissen als
zeitliche räumliche
(∆s′ ) 2 =
−
Entfernung Entfernung
= (c∆t′ ) − ( ∆x ′ ) − ( ∆y ′ ) − ( ∆z′ )
∆x ′ = (βc ) ∆t′
Nach einer Schwingung kehrt die Masse bezüglich O’ nicht in die
Anfangsposition zurück. Sie ist in die x’-Richtung um ∆x’ verschoben
255
Während der Schwingung mit der gemessenen Periode ∆t’, hat sich
das Masse-Feder-System mit der Geschwindigkeit βc in die x’-Richtung bewegt.
Physik
256
Relativität
2
Das Raumzeit-Intervall ist dann gleich
zeitliche räumliche
(∆s′ ) 2 =
−
Entfernung Entfernung
2
2
2
2
2
2
= (c∆t′ ) − ( ∆x ′ ) − ( ∆y ′ ) − ( ∆z′ )
2
= (c∆t′ ) − (βc∆t′ ) − 0 2 − 0 2
= (1 − β 2 )(c∆t′ )
=
γ2
1
123
(∆s′ ) 2 = (1 − β 2 )(c∆t′ ) = (∆s) 2 = (c∆τ ) 2
Da das Raumzeit-Intervall eine Invariante ist, muss es denselben Wert
für alle Beobachter besitzen. D.h.
und es folgt
bezüglich O ′
bezüglich O
gemessene
gemessene Zeit
}
} Zeit
∆t′
= γ ∆τ
Das Zeitintervall, gemessen in einem bewegten Bezugssystem, ist
immer um den Faktor γ grösser als das Eigenzeitintervall. Man
spricht von Zeitdilatation.
D.h., Vorgänge scheinen länger zu dauern, wenn sie in einem System
ablaufen, das sich relativ zum Beobachter bewegt, als wenn sich das
System in Ruhe befindet.
Werden unterschiedliche Geschwindigkeiten von allen Uhren “wirklich” beobachtet? Die Antwort ist “ja!”. Wäre es möglich, dass komplizierte Uhren (d.h. komplizierter als die einfache Bewegung einer
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
schwingenden Masse) nicht langsamer gehen? Die Antwort ist
“nein”.
Wäre das mit einer bestimmten Uhr gemessene Zeitintervall verschieden vom Wert, den die Zeitdilatation voraussagt, dann könnte man
diese Uhr benutzen, um zu entscheiden, ob man sich wirklich bewegt
oder nicht. Dies ist aber im Widerspruch zum Relativitätsprinzip.
Es folgt, dass wenn eine Art von Uhr durch Geschwindigkeitseffekte
langsamer geht, dann müssen alle Uhren und, im Allgemeinen, alle
Vorgänge, die von der Zeit abhängen, um genau denselben Faktor γ
langsamer gehen, um das Relativitätsprinzip nicht zu verletzen.
Das Flugzeugexperiment2: Am 22. November 1975 flog ein
Patrouillenflugzeug 15 Stunden lang in einer Höhe von 25000
bis 35000 Fuss. Im Flugzeug befanden sich sehr genaue
Atomuhren. Die Uhren wurden mit genau gleichen Uhren auf
der Erde verglichen.
Bei einer mittleren Fluggeschwindigkeit von 140 Metern pro
Sekunde lagen die durch die Luft transportierten Uhren nach
dem 15-Stunden-Flug im Durchschnitt 5,6 Nanosekunden
zurück. Die Theorie sagt für diese Geschwindigkeit eine Differenz von 5,7 Nanosekunden vorher. Der Zeitdilatationseffekt
war bei diesem Experiment klein, weil die Geschwindigkeit
des Flugzeuges klein war relativ zur Lichtgeschwindigkeit.
Aber die Atomuhren sind so genau, dass das Nachgehen der
Uhren eindeutig ist, und es stimmt mit der Theorie überein.
257
2. C.O. Alley, Quantum Optics, Experimental Gravity, and Measurement Theory, ed. P.
Meystre und M.O. Scully (Plenum, New York, 1983).
Physik
258
Relativität
6.8.5 Der ganze Weltraum gehört uns
Das Lichtjahr wird definiert als die Entfernung, die das Licht in
einem Jahr zurücklegt:
1 Lichtjahr = c × (1Jahr) ≈ 9, 5 × 1015 Meter
Etwa 99 Lichtjahre von der Erde entfernt liegt der Stern Kanopus.
Wir nehmen an, dass wir den Stern besuchen wollen, um ihn zu photographieren und mit den Aufnahmen nach Hause zurückzukehren.
Ist das möglich? Wir denken: “Wir haben nur wenig mehr als 100
Jahre zu leben. Wir können höchstens die halbe Zeit für den Hinflug
und die halbe Zeit für den Rückflug aufbringen. Selbt wenn wir mit
Lichtgeschwindigkeit fliegen würden, würden wir 99 Jahre brauchen,
nur um dorthin zu gelangen...”
Dieses Denken ist nicht richtig, weil wir die Zeitdilatation verwenden
müssen.
1 − (0, 994 )
1
2
≈9
Wenn die Rakete zum Kanopus sich z.B. mit einer Geschwindigkeit
V=0,994c bewegt, ist der Lorentz-Faktor gleich
γ=
D.h., alle Uhren in der Rakete (und auch unser Lebenslauf) gehen
9 Mal langsamer als auf der Erde.
Was für jemand auf der Erde als 99 Jahre lang erscheint, dauert für
jemand in der Rakete nur 99/9=11 Jahre.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
x
99 Lichtjahr
/γ =
/ γ = 99, 6 / γ ≈ 11 Jahre
V
0, 994 c
Wenn die Rakete sich mit einer Geschwindigkeit V=0,994c bewegt,
dauert für jemand in der Rakete die Reise zum Stern Kanopus
t=
Mit einer solchen Geschwindigkeit dauert die Reise zum Kanopus
und zurück 22 Jahre. Es ist dann ganz gut möglich, Kanopus zu besuchen und mit den Aufnahmen nach Hause zurückzukerhen. Für die
Leute, die auf der Erde bleiben, hat die Reise natürlich 99,6x2≈200
Erdjahre gedauert...
Wenn wir in derselben Flugzeit weiter weg reisen wollen, müssen wir
eine schnellere Rakete benutzen! Weil der Lorentz-Faktor γ nach
unendlich geht wenn V nach c geht, können wir im Prinzip so weit
entfernte Ziele bereisen, wie wir wollen. Der ganze Weltraum gehört
uns.
6.8.6 Längenkontraktion
x = Vt = (0, 994 c )(11Jahre) ≈ 11 Lichtjahre
Wir betrachten noch einmal die Reise zum Stern Kanopus. Wir haben
gefunden, dass für die Leute in der Rakete die Reise ungefähr 11
Jahre dauert. In dieser Zeit hat die Rakete den folgenden Abstand
zurückgelegt
Wie konnte die Rakete Kanopus erreichen, wenn sie nur einen
Abstand von 11 Lichtjahren zurückgelegt hat? Kanopus ist für die
Leute in der Rakete viel weniger weit entfernt.
Wie die Zeitdilatation ist das Phänomen der Längenkontraktion reell.
259
Die räumliche Entfernung zwischen zwei Punkten (oder die
Länge eines Gegenstandes) erscheint geringer, wenn sich der
Physik
260
Relativität
Beobachter relativ zu diesen Punkten bewegt als wenn er relativ zu ihnen ruht.
Die Länge eines Gegenstandes, gemessen in seinem Ruhesystem,
heisst Eigenlänge ∆λ (oder Ruhelänge).
Wie können wir z.B. die Länge eines sich bewegenden Stabes messen? Eine Möglichkeit ist, zur selben Zeit die Positionen der beiden
Enden zu markieren. D.h.,
der gemessene Abstand zwischen den beiden Enden des Stabes ist gleich der räumliche Entfernung zwischen Ereignissen,
die zu derselben Zeit gemessen werden (Siehe die Definition
des Zeitintervalls Kap. 6.8.4).
Zum Beweis betrachen wir einen Stab, der sich im Bezugssystem O
in Ruhe befindet. Ein zweiter Beobachter O’ bewegt sich relativ zum
Stab mit einer Geschwindigkeit V. Es gilt
∆λ = ∆x = γ ( ∆x ′ + βc∆t′ )
bezüglich O ′
gemessene Länge
}
∆x ′
=
gemessene Länge
}
∆λ
γ
bezüglich O
Für O’ ist die Länge des Stabes gleich dem, zu derselben Zeit gemessenen Abstand, d.h.
∆t′ = 0 ⇒ ∆λ = γ ( ∆x ′ ) ⇒
6.8.7 Die Geschwindigkeitstransformation
Wir haben gesehen, dass aus der Galileischen Transformation die
gewöhnliche Vektoraddition der Geschwindigkeit folgt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
Mit Hilfe der Lorentz-Transformation können wir berechnen, wie
sich Geschwindigkeiten beim Übergang von einem Beobachter zu
einem anderen transformieren.
Wir betrachten einen Körper, der sich mit einer Geschwindigkeit
r
u ′ = ux ′ , uy ′ , uz′
im Bezugssystem O’ bewegt, das sich relativ zum Bezugssystem O
mit einer Geschwindigkeit V in x-Richtung bewegt.
Die Geschwindigkeit des Körpers bezüglich O ist
(
)
r
dx dy dz
u = ux , uy , uz = , ,
dt dt dt
Die Lorentz-Transformation gilt auch für differentielle Intervalle
(Siehe Kap. 6.8.3):
dx = γ ( dx ′ + βcdt′ )
dy = dy ′
dz = dz′
cdt = γ (cdt′ + βdx ′ )
261
Der Geschwindigkeitsvektor bezüglich O kann damit berechnet werden. Für die x-Komponente gilt
dx ′
+ βc
dt′
γ ( dx ′ + βcdt′ )
u ′ +V
dx
dx
ux =
=c
=c
=c
= x
β
dx
′
cdt
dx
cdt
dt
+
γ
β
′
′
(
)
c + β
1 + ux ′
c
dt′
Physik
262
Relativität
Für die y-Komponente gilt
dy ′
uy ′
dy ′
dy
dy
dt′
uy =
=c
=c
=c
=
dx
β
′
cdt
dx
cdt
dt
γ
β
+
′
′
(
)
γ c + β
γ 1 + ux ′
dt′
c
und eine ähnliche Gleichung für die z-Komponente.
Diese Gleichungen unterscheiden sich vom gewöhnlichen Ergebnis
der Vektoraddition, weil die Nenner nicht gleich 1 sind. Für den
Grenzfall V<<c und ux’<<c gehen diese Gleichungen in die Galileische Vektoraddition über.
6.8.8 Gleichzeitigkeit
Die spezielle Relativit tstheorie
O
y
c
l
x
Laser
l
Strahlteiler
c
grüne
Lampe
y'
O'
x'
Geschwindigkeit V
Da der Laserpuls sich in beide Richtungen des Tischs mit derselben Geschwindigkeit c ausbreitet, werden die grüne und
die rote Lampe gleichzeitig eingeschaltet.
rote
Lampe
Figur 25. Eine Anordnung, um die Gleichzeitigkeit von Ereignissen zu
prüfen. Da der Laserpuls sich in beide Richtungen mit der
Geschwindigkeit c ausbreitet, werden die grüne und rote Lampe
gleichzeitig eingeschaltet.
Wir stellen uns nun die Frage, was geschehen würde, wenn der Tisch
sich bewegt.
Wir werden nun beweisen, dass der Ausdruck “zur selben Zeit”
gewöhnlich nur für ein Bezugssystem Gültigkeit hat.
Abb. 25 zeigt eine Anordnung, die auf einem Tisch liegt. Ein Laserpuls wird emittiert.
Wir definieren zwei Ereignisse im Bezugssystem O des Tischs:
Physik
263
wobei l der Abstand zwischen den Lampen und dem Strahlteiler ist.
Wir haben das Ergebnis benutzt, dass das Licht die beiden Lampen
x1µ = (ct, + l, 0, 0)
µ
x 2 = (ct, − l, 0, 0)
Die Raumzeit-Koordinaten dieser Ereignisse bezüglich O sind gleich
2. Ereignis: das Licht erreicht die rote Lampe
1. Ereignis: das Licht erreicht die grüne Lampe
Der Laserpuls fällt auf einen Strahlteiler.
Ein Teil des Lichts geht nach vorn, wo er schliesslich einen Empfänger erreicht, der an eine grüne Lampe angeschlossen ist. Ein anderer
Teil geht nach hinten, wo er einen anderen Empfänger erreicht, der an
eine rote Lampe angeschlossen ist.
Wenn der Laserpuls einen Empfänger trifft, schaltet die angeschlossene Lampe ein.
Wir nehmen an, dass der Laser und der Strahlteiler sich in der Mitte
des Tischs befinden.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
264
Relativität
gleichzeitig erreicht, und deshalb die Zeiten t1 und t2 der beiden
Ereignisse einander gleich sind:
t1=t2=t.
Die Raumzeit-Koordinaten bezüglich einem Beobachter O’, der sich
mit einer Geschwindigkeit βc relativ zum Tisch bewegt, wird mit
Hilfe der Lorentz-Transformation gefunden. Es gilt
ct1′ = γ (ct1 − βx1 ) = γ (ct − βl)
′
ct2 = γ (ct2 − βx 2 ) = γ (ct + βl)
Der von O’ gemessene Zeitunterschied ∆t’ ist dann gleich
1
1
2γβl
∆t′ = ct2′ − ct1′ = (γ (ct + βl) − γ (ct − βl)) =
c
c
c
D.h., der Zeitunterschied hängt von der Geschwindigkeit ab und verschwindet nicht, wenn β≠0.
Bezüglich des bewegten Beobachters schalten die beiden
Lampen nicht gleichzeitig ein! Die Gleichzeitigkeit von
Ereignissen ist relativ.
Dieses Ergebnis wird oft als Einsteinsches Zugsparadoxon bezeichnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
⇒ ∆t′ < 0 ⇒ t2′ < t1′
⇒ erst schaltet die rote Lampe ein
⇒ ∆t′ > 0 ⇒ t2′ > t1′
⇒ erst schaltet die grüne Lampe ein
Wir bemerken zusätzlich, dass das Vorzeichen des Zeitunterschieds
vom Vorzeichen des Geschwindigkeitsparameters β abhängt. Wir
unterscheiden zwei Fälle
β > 0
β < 0
d.h., die zeitliche Ordnung des Einschaltens der Lampen hängt von
der Richtung der Bewegung ab. Nicht nur ist die Gleichzeitigkeit von
Ereignissen vom Beobachter abhängig, aber auch ihre zeitliche Ordnung. Dass ein Ereignis früher oder später als ein anderes Ereignis
geschieht, ist ein relativer Begriff!3
Wie wird der sich bewegende Beobachter erklären, dass die beiden
Lampen nicht gleichzeitig einschalten?
Wir stellen uns vor, dass der bewegte Beobachter O’ den Tisch sieht,
wie Abb. 26 zeigt.
265
3. Die Gleichzeitigkeit der Ereignisse wird von der Relativitätstheorie gebrochen. Man kann
beweisen, dass die Kausalität von Ereignissen nicht verletzt wird, solange keine Information sich schneller als die Lichtgeschwindigkeit ausbreiten kann.
Physik
266
Relativität
Geschwindigkeit V
V
rote
Lampe
O
y
c
c
l'
x
Laser
c
l'
Strahlteiler
c
grüne
Lampe
V
y'
O'
Figur 26. Der Tisch, wie er vom Beobachter O’ gesehen wird. Der
Beobachter sieht, dass die rote Lampe sich vom Lichtstrahl entfernt, und
dass die grüne Lampe sich dem Lichtstrahl nähert.
x'
Der Tisch, der Laser und die Lampen bewegen sich mit einer
Geschwindigkeit βc in die negative x-Richtung (d.h. nach links in der
Abbildung).
l
γ
Wegen der Lorentz-Kontraktion erscheint der Tisch verkürzt mit
einer halben Länge
l′ =
Wir schreiben die Gleichungen, die die Bewegung der Lampen und
des Lichtstrahls beschreibt. Wir nehmen an, dass der Laserpuls zur
Zeit t’=0 emittiert wird, und dass zur Zeit t’=0 der Beobachter O’
sich an der Position des Strahlteilers befindet.
Für den Beobachter O’ entfernt sich die rote Lampe vom
Lichtstrahl mit einer Geschwindigkeit βc, und die grüne
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die spezielle Relativit tstheorie
Lampe nähert sich dem Lichtstrahl mit einer Geschwindigkeit
βc.
l
x grün ( t1′ ) = l′ − Vt1′ = − βct1′
γ
x ( t ′ ) = − l′ − Vt ′ = − l − βct ′
rot 2
2
2
γ
Wegen des Postulats der Lichtgeschwindigkeit, breitet sich der
Laserpuls in beide Richtungen des Tischs mit derselben
Geschwindigkeit c aus.
x licht _ 1 ( t1′ ) = ct1′
′
′
x licht _ 2 ( t2 ) = −ct2
l
x grün ( t1′ ) = − βct1′ = ct1′
⇒
γ
x ( t ′ ) = − l − βct ′ = −ct ′ ⇒
2
2
rot 2
γ
(1 − β )ct2′ =
l
(1 + β )ct1′ =
γ
l
γ
Die Lichtstrahlen und die Lampen treffen sich zu den Zeiten t1’ resp.
t2’
Es folgt
2βγl
c
l 1
l 1 + β − 1 + β 2βl 2
1
1
−
γ
∆t′ = ct2′ − ct1′ =
=
=
cγ 1 − β 1 + β cγ 1 − β 2 cγ
c
=
267
d.h., wir haben das Ergebnis wieder gefunden, das mit Hilfe der Lorentz-Transformation hergeleitet wurde.
Physik
268
Relativität
6.9 Der relativistiche Energie-Impuls
Vektor
)
Im Kap. 3.2.2 und 3.2.3 haben wir die relativistiche Masse und den
relativistischen Impuls eines Teilchens definiert als
) (
m = γm0
r
r
r
r
p = mv = γm0v = γm0βc
(
wobei m0 die Ruhemasse des Teilchens und
r
β ≡ v x / c, v y / c, v z / c = β x , β y , β z
der normierte Geschwindigkeitsvektor ist.
Die Energie des Teilchens ist wegen der Masse-Energie-Äquivalenz
gleich
E = mc 2 = γm0c 2
Weil Energie und Impuls von der Geschwindigkeit des Teilchens
abhängen, werden verschiedene Beobachter im Allgemeinen unterschiedliche Energien und Impulse desselben Teilchens messen.
E = m 0c 2
⇒ r
r r
p = γm0v = 0
Wir definieren das Teilchen-Ruhebezuggsystem (oder Ruhesystem)
als das System, in dem sich das Teilchen in Ruhe befindet. D.h., relativ zum Ruhebezugssystem gilt
β = 0 ⇒ γ =1
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der relativistiche Energie-Impuls Vektor
(µ = 0,1, 2, 3)
Ähnlich wie für den Raumzeit 4-Vektor, definieren wir den EnergieImpuls 4-Vektor als
pµ ≡
= ( p 0 , p1, p 2 , p 3 )
= ( E , px c, py c, pzc )
r
= ( E , pc )
wobei der Index µ über die 4 Komponenten des Vektors läuft. Wir
bemerken, dass mit einer solchen Definition alle Komponenten des
Energie-Impuls 4-Vektors dieselbe Einheit besitzen.
Bezüglich des Ruhebezugssystems ist der Energie-Impuls 4-Vektor
eines Teilchens gleich
p µ ≡ ( m0c 2 , 0, 0, 0)
wobei m0 die Ruhemasse des Teilchens ist.
Wir bemerken, dass verschiedene Beobachter ihre Messungen des
Energie-Impuls 4-Vektors durch eine Lorentz-Transformation korrelieren.
(
)
269
Wir betrachten ein Bezugssystem O’, das sich relativ zu O mit einer
Geschwindigkeit V=βc in der x-Richtung bewegt, d.h.
r
β = β x , β y , β z = (β, 0, 0)
Physik
270
Relativität
Die Transformation des Energie-Impuls 4-Vektors von O nach O’ ist
p′µ
M Lorentz ( β )
p
E′ γ
−γβ 0 0 E
cp ′
0 0 cpx
x = −γβ γ
cpy ′ 0
0 1 0 cpy
0 0 1 cpz
cpz′ 104442
444
3 123
123
µ
In diesem Fall beobachtet man eine Symmetrie zwischen Energie und
Impuls (Siehe Kap. 6.7).
Als Beispiel betrachten wir ein Teilchen, das sich relativ zu O in
Ruhe befindet.
2
2
E
E
cp
γ
β
=
−
′
(
x ) = γ ( m 0c − 0) = γm 0c
2
2
′
cpx = γ (cpx − βE ) = γ (0 − βm0c ) = −γm0βc
cpy ′ = cpy
′
cpz = cpz
Relativ zu O’ ist der Energie-Impuls 4-Vektor gleich
d.h.
p′ µ = (γm0c 2 , −γm0βc 2 , 0, 0) = γm0c 2 , (−γm0v x )c, 0, 0
3
123 1424
E′
p x′ c
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der relativistiche Energie-Impuls Vektor
und deshalb bewegt sich das Teilchen relativ zu O’, das sich relativ
zum Teilchen in der positiven x-Richtung bewegt, mit einer
Geschwindigkeit –βc in der negativen x’-Richtung.
)
p µ = (γm0c 2 ,γm0βc 2 , 0, 0)
Wir betrachten nun ein Teilchen, das sich mit einer Geschwindigkeit
βc relativ zum Beobachter O in der positiven x-Richtung bewegt. Ein
zweiter Beobachter O’ bewegt sich in derselben x-Richtung und mit
derselben Geschwindigkeit wie das Teilchen. Es gilt
und
(
2
2
2
2
2
2
E ′ = γ ( E − βcpx ) = γ γm0c − β (γm0βc ) = γ m0c (1 − β ) = m0c
2
2
′
cpx = γ (cpx − βE ) = γ (γm0βc − βγm0c ) = 0
D.h., das Teilchen befindet sich relativ zum Beobachter O’ in Ruhe.
271
Ruhemasse. Als wir die Raumzeit-Koordinaten eines Ereignisses
studiert haben, haben wir bemerkt, dass verschiedene Beobachter
dasselbe Ereignis mit unterschiedlichen Koordinaten ausdrücken.
Auch waren die räumliche und zeitliche Entfernungen zwischen
Ereignissen verschieden für verschiedene Beobachter, aber das
Raumzeit-Intervall wurde so definiert, dass es eine Invariante der
Lorentz-Transformation ist (d.h. es besitzt denselben Wert für alle
Beobachter).
Physik
272
Relativität
2
2
Im Fall des Energie-Impuls 4-Vektors können wir in ähnlicher Weise
eine Grösse definieren als
( )
2
Energie Impulse
2
2
= ( E ) 2 − ( px c ) − py c − ( pzc )
−
Koordinate Koordinaten
r 2
2
= ( E ) − ( pc )
(Das negative Vorzeichen ist wichtig!).
Man kann beweisen, dass, wie im Fall des Raumzeit-Intervalls, diese
Grösse eine Invariante der Lorentz-Transformation ist.
Es folgt
2
2
r
r 2
( E ) 2 − ( pc ) 2 = (γm0c 2 ) − (γm0vc )
r
v2
= γ 2 m02c 4 1 − 2
c
= m02c 4
= ( m0c 2 )
und deshalb messen alle Beobachter denselben Wert für die Ruhemasse des Teilchens. D.h., die Ruhemasse eines Teilchens ist eine
Invariante der Lorentz-Transformation.
Energie-Impulserhaltung. Das Konzept des Energie-Impuls 4-Vektors ist wichtig, weil aus dem Prinzip der Erhaltung der Energie und
des Impulses ein ähnliches Prinzip der Erhaltung des Energie-Impuls
4-Vektors folgt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Rot- und Blauverschiebung des Lichts
In Vorgängen, in denen viele Teilchen teilnehmen, wird der GesamtEnergie-Impuls 4-Vektor definiert als
i
P µ = p1µ + p2µ + ... = ∑ piµ
Wenn das System isoliert ist, wird der Gesamt-Energie-Impuls 4Vektor erhalten. Diese Grösse ist deshalb sehr nützlich, und kann
relativ zu verschiedenen Bezugssystemen mit Hilfe der LorentzTransformation berechnet werden. Siehe z.B. Kap. 7.1.9 (Stossvorgänge).
6.10 Die Rot- und Blauverschiebung
des Lichts
Wir betrachten eine Lichtquelle (im Bezugssystem O’), die sich mit
einer konstanten Geschwindigkeit βc in Richtung eines Beobachters
O bewegt.
⇒
λ′ =
c
ν′
Bezüglich O’ ist die Wellenlänge λ’ des emittierten Lichts gleich
c = ν ′λ ′
∆t′ =
1
ν′
273
wobei ν’ die Frequenz des Lichts ist. Das Zeitintervall ∆t’ zwischen
zwei aufeinanderfolgenden Wellenbergen ist gleich
Physik
274
Relativität
Für den Beobachter O ist wegen der Zeitdilatation dieses Zeitintervall
∆t gleich
∆t = γ∆t′
Die vom Beobachter O gemessene Wellenlänge λ ist gleich
λ = c∆t − βc∆t = (1 − β )c∆t
⇒
λ
1− β
≤1
=
λ′
1+ β
weil sich die Quelle um eine Strecke βc∆t auf den Beobachter zubewegt, während ein Wellenberg in einem Zeitintervall ∆t eine Entfernung c∆t zurücklegt.
Siehe Abb. 27.
Es folgt
λ′ =
1− β
λ′
1+ β
λ = (1 − β )c∆t = (1 − β )c (γ∆t′ )
c
= (1 − β )γ
ν′
1− β 2
1− β
= (1 − β )γλ ′
=
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Rot- und Blauverschiebung des Lichts
Ruhende
Quelle
βc
Bewegte
Quelle
βc
Bewegte
Quelle
λ
λ
λ
Wellenberge
c
c
c
Figur 27. Licht wird von einer Quelle emittiert. Die Wellenlänge erscheint
länger or kürzer, wenn die Quelle sich bewegt.
Wenn sich die Quelle in Richtung des Beobachters bewegt, wird die
vom Beobachter gemessene Wellenlänge kleiner als sie im Quellensystem erscheint. D.h., das Verhältnis der Frequenzen des Lichts ist
gleich
1+ β
ν λ′
≥1
=
=
1− β
ν′ λ
275
Weil Wellenlängen im Bereich von 0,7µm der roten Farbe und 0,4µm
der blauen Farbe ensprechen, spricht man von Blauverschiebung des
Lichts, wenn λ < λ’.
Physik
276
Relativität
Im Fall einer sich vom Beobachter wegbewegenden Quelle finden wir
mit β → −β
1− β
ν λ′
≤1
=
=
1+ β
ν′ λ
und man spricht von Rotverschiebung des Lichts.
Rotverschiebung von Galaxien. Die Rotverschiebung kann benutzt
werden, um die Geschwindigkeit von entfernten Galaxien relativ zur
Erde zu bestimmen.
Man misst sogenannte Lichtlinien von Atomen, die mit charakteristischen Wellenlängen emittiert und absorbiert werden. Eine Linie
der Balmer-Serie des Wasserstoffatoms hat z.B. eine Wellenlänge von
λ Balmerlinie = 656 nm
Im Licht einer entfernten Galaxie wird z.B. die Wellenlänge dieser
Linie mit dem folgenden Wert gemessen
λ = 1460 nm
4, 95 − 1
≈ 0, 664
4, 95 + 1
1 + β 1460
=
≈ 4, 95
1 − β 656
2
D.h., man beobachtet eine Rotverschiebung der Linie. Mit der Verschiebung berechnen wir die Geschwindigkeit
und wir finden
1 + β = 4, 95(1 − β ) ⇒ β =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Rot- und Blauverschiebung des Lichts
Mit der Methode der Rotverschiebung in den Lichtspektren von
Galaxien kann man die (radiale) Geschwindigkeit der Galaxien relativ zur Erde bestimmen.
v=210 km/s
v=2300 km/s
v=5500 km/s
v=15000 km/s
v=23000 km/s
d=2,6 Mpc
d=28,8 Mpc
d=68,8 Mpc
d=187,5 Mpc
d=287,5 Mpc
Im Jahr 1929 hat E.P. Hubble mit einer solchen Methode eine Beziehung zwischen der Geschwindigkeit einer Galaxie und ihrer Entfernung von der Erde gefunden.
Zum Beispiel,
NGC221
NGC4473
NGC379
Galaxie im Ursa Major Haufen
Galaxie im Gemini Haufen
wobei
1 pc = 1 Par sec ≈ 3,1 × 1016 m ≈ 3,1 Lichtjahre
und 1 Mpc = 106 pc.
v = Hr
Das Hubble-Gesetz sagt eine lineare Beziehung voraus
wobei v die Geschwindigkeit relativ zur Erde, r die Entfernung von
der Erde, und H die Hubble-Konstante ist.
277
In Abb. 28 sind neue Messungen der Beziehung zwischen der Entfernung und der Geschwindigkeit von entfernten Objekten zusammengefasst. Diese Messungen, bis zu Entfernungen von 400 Mpc (d.h.
≈1,2 GLj = 1,2x109 Lichtjahre), wurden mit Hilfe des NASA/ESA
Hubble Space Telescopes durchgeführt.
Physik
278
Relativität
einer beliebigen Galaxie die gleiche Feststellung machen würde. Es
folgt, dass sich alle Galaxien voneinander entfernen. Man spricht von
der Expansion des Universums.
Eine bersicht der allgemeinen Relativit tstheorie
Physik
1
r
r
=
=
v Hr H
1
≈ 4, 3 × 1017 Sekunde
72 km / s / Mpc
279
Die spezielle Relativitätstheorie spricht von Inertialsystemen. Sie
sagt, dass es kein physikalisch bevorzugtes Inertialsystem gibt, und
dass die Naturgesetze in allen Inertialsystemen dieselbe Form annehmen müssen.
Die Verallgemeinerung der speziellen Relativitätstheorie auf NichtInertialsysteme heisst allgemeine Relativitätstheorie. Sie wurde von
Einstein im Jahr 1916 veröffentlicht.
6.11 Eine Übersicht der allgemeinen
Relativitätstheorie
d.h., ungefähr 15 Milliarden Jahre. Zum Vergleich, das Alter der Erde
ist ungefähr 5 Milliarden Jahre.
≈ 15 × 10 9 Jahre
T≈
wobei r die Entfernung ist. Wir finden
T=
Unter dieser Annahme hat das Universum mit dem “Big-Bang”
(Urknall) begonnen und sich seitdem ausgedehnt. Mit der HubbleKonstante kann das Alter des Universums bestimmt werden:
Der genaue Wert der Hubble-Konstante ist schwierig zu berechnen
weil die genauen Entfernungen der weit entfernten Objekte im Universum schwierig zu bestimmen sind. Ein mittlerer Wert von neuen
Messungen gibt
H = 72 ± 8 ( km / s) / Mpc ≈ 2, 4 (cm / s) / Lj
Figur 28. Neue Messung der Hubble-Konstante mit dem Hubble Space
Telescope (HST). (Freedman et al., astro-ph/0012376, Dez 2000)
Das Hubble-Gesetz sagt, dass sich die Galaxien alle von uns entfernen. Da es keinen Grund gibt zur Annahme, dass unsere Lage auf der
Erde bevorzugt ist, müssen wir annehmen, dass ein Beobachter in
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
280
Relativität
Die spezielle Relativitätstheorie hängt stark vom Begriff des Inertialsystems ab. Eine genaue Definition eines Inertialsystems fehlt trotzdem in der speziellen Relativitätstheorie. Man sagt4, dass dies einer
der Gründe ist, der Einstein zur Entwicklung der allgemeinen Relativitätstheorie geführt hat.
6.11.1 Das Gravitationsfeld
Im Kap. 2.6 haben wir die Existenz der allgemeinen Gravitationskraft
gelernt.
Wenn wir die Erde und, in einem bestimmten Abstand von ihr, einen
beliebigen Körper betrachten, so übt die Erde eine Kraft auf diesen
Körper aus.
Die Gravitationskraft, die die Erde auf eine Masse m ausübt, ist
gleich (siehe Kap. 2.6.4)
r
r
Gm
Em r
FG = −
r2 r
wobei G die universelle Gravitationskonstante, mE die Masse der
Erde und r der Ortsvektor der Masse ist. Der Ursprung des Koordinatensystems ist der Erdmittelpunkt.
Wir definieren das Gravitationsfeld der Erde als
r
r
r r
F
Gm r
g (r ) = G = − 2 E
m
r r
E
4. W. Rindler, “Essential Relativity”, Springer-Verlag (1979).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine bersicht der allgemeinen Relativit tstheorie
Das Feld entspricht der Kraft, die eine Masse m in diesem Feld
erfährt, dividiert durch die Masse (d.h. der Beschleunigung der Masse
m).
Wir sagen, dass wegen der Anwesenheit der Erde ein Gravitationsfeld im ganzen Weltraum erzeugt wird. Im Allgemeinen
erzeugt ein beliebiger Körper, der eine Masse besitzt, ein
Gravitationsfeld im ganzen Weltraum um ihn.
Die Gravitations-Wechselwirkung zwischen der Erde und einem
beliebigen Körper wird so erklärt: die Erde erzeugt ein Gravitationsfeld gE in jedem Punkt des Weltraums. Der Betrag dieses Feldes
hängt vom Abstand zum Erdmittelpunkt ab. Ein beliebiger Körper der
Masse m spürt den lokalen Wert des Feldes und spürt damit eine Kraft
gleich
r
r r
FG = mgE ( r )
In einer ähnlichen Weise können wir das Gravitationspotential definieren als
r
E pot ( r )
r
GmE
φG ( r ) ≡
=−
m
r
wobei Epot die potentielle Energie der Gravitationskraft ist (Siehe
Kap. 3.8.4). Wir erinnern uns daran, dass die Kraft mit Hilfe des Gradienten gefunden werden kann (Siehe Kap. 3.8.3)
r
r
∂E
∂E pot r
∂E
r
r
pot
pot
F ≡ −∇E pot = −
e +
e +
e
∂x x
∂y y
∂z z
r
r
g ≡ −∇φG
281
Es folgt, dass das Gravitationsfeld gleich dem Gradient des Gravitationspotentials ist
Physik
282
Relativität
6.11.2 Das Äquivalenzprinzip
Die Grundlage der speziellen Relativitätstheorie bilden zwei Postulate. Im Fall der allgemeinen Relativitätstheorie ist die Grundlage das
sogenannte Äquivalenzprinzip:
Ein homogenes Gravitationsfeld ist zu einem gleichförmig
beschleunigten Bezugssystem völlig äquivalent.
Ein Körper der schweren Masse mg erfährt in einem homogenen Gravitationsfeld eine Kraft
r
r
FG = mg g
⇒
Die Beschleunigung ist gleich die Kraft dividiert durch die träge
Masse mI:
r
r
F = mI a
r
mg r
r F
g
=
a=
mI mI
Wegen der Äquivalenz von schwerer und träger Masse, die in der
Newtonschen Mechanik betrachtet wird (siehe Kap. 2.1.2), spüren
alle Körper die gleiche Beschleunigung, unabhängig von ihrer Masse
r r
⇒ a=g
mI ≡ mg
Eine bersicht der allgemeinen Relativit tstheorie
=
g
Homogenes Gravitationsfeld
Erde
In der allgemeinen Relativitätstheorie nahm Einstein an, dass dieses
Prinzip (das sogenannte Äquivalenzprinzip) nicht nur in der Mechanik, sondern in der gesamten Physik, gelten muss.
a
Beschleunigte Rakete
Figur 29. Nach dem Äquivalenzprinzip können sich die Beobachtungen in
einer gleichförmig beschleunigten Rakete nicht unterscheiden von denen in
einem homogenen Gravitationsfeld, falls die Beschleunigung und das
Gravitationsfeld denselben Betrag besitzen.
6.11.3 Die Gravitationsrotverschiebung
Wir betrachten eine Rakete, in der sich zwei gleiche Uhren befinden.
Die erste Uhr A hängt an der Decke der Rakete, und die zweite Uhr B
liegt auf dem Boden der Rakete.
D.h., vom Standpunkt der Mechanik aus gibt es keinen Unterschied
zwischen der Wirkung eines homogene Gravitationsfelds, das alle
Körper gleich beschleunigt, und der einer hypothetischen Beschleunigung, die auch alle Körper gleich beschleunigt, falls das Gravitationsfeld und die Beschleunigung denselben Betrag besitzen.
Siehe Abb. 29.
Physik
283
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
284
Relativität
Wenn die Rakete sich in Ruhe befindet, beobachten wir, dass beide
Uhren in jedem Zeitintervall ∆t einen Lichtpuls mit derselben Lichtfrequenz ν emittieren.
Die Rakete wird nun gleichförmig beschleunigt. Wir sitzen auf dem
Boden und vergleichen die Lichtpulse von A und B. Siehe Abb. 30.
a
A
a
L
B
Zeit t+∆t
Geschwindigkeit v+a∆t
A
B
Zeit t
Geschwindigkeit v
Eine bersicht der allgemeinen Relativit tstheorie
Zeitintervalls ∆t wurde die Rakete gleichförmig beschleunigt und
bewegt sich jetzt mit der grösseren Geschwindigkeit
v + a∆t = βc + a∆t
L
c
⇒ ∆β ≈
aL
c2
Weil die Rakete während des Zeitintervalls ∆t beschleunigt wurde,
erscheint die Quelle A des Lichtpulses in Bewegung in Richtung des
Punkts B, mit einer relativen Geschwindigkeit
(βc + a∆t) − βc = a∆t ≈ a
wobei L der Abstand der Uhren ist. Die scheinbare Geschwindigkeit
des Empfängers B relativ zur Quelle A ist konstant gleich ∆β (für eine
gleichförmige Beschleunigung a).
L
1− a 2
c
L
1+ a 2
c
2
≈1+ a
L
c2
Damit misst der Beobachter in B eine Blauverschiebung des Lichtes
(Siehe Kap. 6.10)
1 + ∆β
1 + ∆β
ν λ′
≈
=
=
=
1 − ∆β
ν′ λ
1 − ∆β 2
Weil der Beobachter weiss, dass die Uhren dieselben sind, schliesst er
aus der Beobachtung der Blauverschiebung, dass die Zeit in A schneller als in B geht!
Nach dem Äquivalenzprinzip können sich die Beobachtungen in
einer gleichförmig beschleunigten Rakete nicht unterscheiden von
denen in einem homogenen Gravitationsfeld, falls die Beschleunigung und das Gravitationsfeld denselben Betrag besitzen.
Figur 30. Gravitations-Zeitdilatation. Wegen der Beschleunigung der
Rakete erscheint in Punkt B die Quelle A als ob sie sich relativ zu B
bewegen würde.
Wir nehmen an, dass zur Zeit t ein Lichtpuls von A emittiert wird. Die
Rakete bewegt sich mit einer Geschwindigkeit βc=v. Während des
Physik
285
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
286
Relativität
∆t′
⇒ ∆t =
gL
1 + 2
c
Es folgt daraus eine Abhängigkeit der Zeit vom Gravitationsfeld, die
sogenannte Gravitations-Zeitdilatation:
gL
ν ∆t′
=
≈1+ 2
c
ν ′ ∆t
d.h., das in B beobachtete Zeitintervall ∆t ist kleiner als das Eigenzeitintervall ∆t’ der Uhr A. Es folgt, dass die Uhr A schneller als die
Uhr B geht.
Experimenteller Beweis:
⇒
gL (1600 m)(9, 81m / s2 )
≈ 1, 7 × 10 −13
≈
2
c2
(3 × 108 m / s)
L ≈ 5320 Fuss ≈ 1600 Meter
Eine Atomuhr am “National Bureau of Standards” in Boulder, Colorado, die sich 5400 Fuss über Meereshöhe befindet,
gewinnt eine Zeitdifferenz von ungefähr 5 µs pro Jahr (=
5x10–6 Sekunde pro Jahr) relativ zu einer gleichen Atomuhr,
die sich am “Royal Greenwich Observatory” in Grossbritanien in einer Höhe von nur 80 Fuss befindet. Die intrinsische
Genauigkeit der Uhren ist 1 µs pro Jahr.
und deshalb
gL
× (1Jahr) ≈ 5 × 10 −6 Sekunde pro Jahr
c2
6.11.4 Die Ablenkung von Licht
Wir betrachten einen Lichtstrahl, der in eine beschleunigte Rakete
eintritt. Siehe Abb. 31.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine bersicht der allgemeinen Relativit tstheorie
a
t2
a
t3
a
t4
Lichtstrahl
Die verschiedenen Positionen der Rakete sind nach gleichen Zeitintervallen gezeigt. Da die Rakete beschleunigt wird, vergrössert sich
der zurückgelegte Abstand nach jedem Zeitintervall. Die Ablenkung
wird zur Verdeutlichung stark übertrieben.
a
t1
g
Lichtstrahl
Figur 31. Lichtablenkung. Das Zeitintervall zwischen aufeinanderfolgenden
Zeiten t1, t2, t3 und t4 ist konstant. Die Ablenkung wird zur Verdeutlichung
stark übertrieben.
287
Für einen Beobachter, der sich in der Rakete befindet, beschreibt der
Lichtstrahl eine Parabel.
Physik
288
Relativität
Wegen des Äquivalenzprinzips gibt es keine Möglichkeit zwischen
der beschleunigten Rakete und einem Inertialsystem, das sich in
einem homogenen Gravitationsfeld befindet, zu unterscheiden.
Wir schliessen daraus, dass das Licht in einem Gravitationsfeld (d.h. in der Nähe einer Masse) abgelenkt wird.
Wegen der hohen Lichtgeschwindigkeit ist dieser Effekt sehr schwer
zu messen. Einstein erwähnte die Möglichkeit, die Ablenkung des
Lichts von einem weit entfernten Stern zu beobachten, wenn das
Licht sich nahe an der Sonne vorbeibewegt.
Weil die Sonne so hell ist, wurde der Effekt erfolgreich zuerst im Jahr
1919, während einer Sonnenfinsternis, beobachtet.
4G M
c2 ξ
Mit Hilfe der allgemeinen Relativitätstheorie kann man beweisen,
dass der von einer Punktmasse M bewirkte Ablenkungswinkel α
gleich
α (ξ ) =
ξ
M
α
Erde
ist, wobei ξ die Entfernung zwischen der Masse und dem Lichtstrahl
ist. Siehe Abb. 32.
Lichtquelle
Figur 32. Gravitationslinse. Das Licht einer weit entfernten Lichtquelle
wird von einer Masse M abgelenkt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine bersicht der allgemeinen Relativit tstheorie
M ( kg)
ξ ( m)
−11 3
2
4 G M 4 (6, 67 × 10 m / kg / s ) M
≈
c2 ξ
ξ
(9 × 108 m 2 / s2 )
Mit G = 6,67 × 10–11 m3/kg/s2 und c2 =9× 108m2/s2 erhalten wir
α (ξ ) =
≈ 3 × 10 −19
Gravitationslinsen -Galerie vom Hubble Space Telescope.
289
Gravitationslinse. Der Effekt wird besser beobachtet, wenn die
Masse sehr gross ist. Typische Galaxien besitzen 1012 Sterne und
werden das Licht von weit entfernten Objekten ablenken. Damit können sogenannte Gravitationslinseneffekte beobachtet werden. Siehe
Abb. 33.
Figur 33.
Physik
290
Relativität
6.11.5 Schwarze Löcher
Oppenheimer und Snyder haben zuerst die Existenz von sogenannten
Schwarzen Löchern im Jahr 1939 vorausgesagt.
Wir betrachten die (klassische) Gesamtenergie eines Körpers, der
sich bei einem Radius r mit der Geschwindigkeit v in der Nähe einer
Masse M befindet
E tot = E kin + E pot
1
Mm
= mv 2 − G
2
r
⇒
vF =
2GM
r
wobei der Ursprung der Koordinaten in der Mitte der Masse M angenommen wird. Die Fluchtgeschwindigkeit wird definiert als die
minimale benötigte Geschwindigkeit, um der Masse M zu entfliehen.
Die Fluchtgeschwindigkeit ist gleich der Geschwindigkeit, die benötigt wird, um das Unendliche ( r → ∞ )mit der Geschwindigkeit null
zu erreichen.
Es folgt
Mm
1 2
mv − G
=0
r
2 F
Die Fluchtgeschwindigkeit nimmt mit der Masse zu und mit dem
Radius ab. Für einen kleiner werdenden Radius wird die Fluchtgeschwindigkeit zunehmen. Was passiert, wenn diese Fluchtgeschwindigkeit den Wert der Lichtgeschwindigkeit erreicht?
2GM
RS
⇒
RS =
2GM
c2
Der Grenzradius heisst der Schwarzschild-Radius und ist gleich5:
c=
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine bersicht der allgemeinen Relativit tstheorie
Für einen Körper mit der Masse der Sonne ist der SchwarzschildRadius ungefähr 3 km. Wenn die ganze Masse der Sonne innerhalb
einem Radius von 3 km konzentriert wäre, würde das Gravitationsfeld so gross werden, dass nichts, nicht einmal Licht, ausgesendet
werden könnte. Kein Objekt kann die Oberfläche eines Schwarzen
Loches verlassen.
Heutzutage gibt es keine sicheren Beweise für die Existenz von
Schwarzen Löchern, wohl aber eine ganze Anzahl von Kandidaten.
Astrophysiker haben Hinweise für ihre Existenz im Zentrum von verschiedenen Galaxien gefunden.
Astrophysiker sind heutzutage der Meinung, dass die Galaxie M87
schlüssige Evidenz für die Existenz von Schwarzen Löchern bringt.
Die Entfernung der M87 (im Virgo Haufen) von der Erde beträgt
50x106 Lichtjahre.
Von einer Analyse der Bewegung der warmen Gase in der Galaxie
kann man schliessen, dass sich ein Schwarzes Loch in der Mitte der
M87 Galaxie befindet.
Die Masse des Objekts, das sich in der Mitte der Galaxie befindet, ist
ungefähr 3 Milliarden Sonnenmassen. Sie ist aber in einem Bereich
konzentriert, der nicht grösser ist als unser Sonnensystem.
291
5. Strenggenommen kann die Newtonsche Mechanik in diesem Fall nicht benutzt werden,
aber sie liefert dasselbe Ergebnis, wie die allgemeine relativistische Rechnung.
Physik
292
Relativität
Figur 34.
Gas in der M87 Galaxie.
Die warmen Gase, mit einer Temperatur von ungefähr 10000°K, drehen sich mit sehr hohen Geschwindigkeiten um das Objekt.
Mit Hilfe der Blau- und Rotverschiebung des Lichts, das vom Gas
emittiert wird, kann man die Geschwindigkeit des Gases berechnen.
Mit der Auflösung des Hubble Space Telescopes konnte man beweisen, dass ein Teil des Gases sich in Richtung der Erde bewegt (d.h.
Blauverschiebung), und dass ein anderer Teil sich von der Erde entfernt (d.h. Rotverschiebung).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine bersicht der allgemeinen Relativit tstheorie
293
Aus der Messung der Verschiebung folgt, dass sich das Gas sehr
schnell um das Objekt dreht, mit einer Geschwindigkeit von ungefähr
500 km pro Sekunde.
Rot- und Blauverschiebung der Lichtspektren von der M87
Siehe Abb. 35.
Figur 35.
Galaxie.
Physik
294
Relativität
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 7
Teilchen, Atome und
Moleküle
7.1 Teilchensysteme
Bis jetzt haben wir von der Dynamik eines Teilchens (einer Punktmasse) gesprochen (Siehe Kap. 1.1.1). Wir wollen nun das Problem
mehrerer Teilchen betrachten.
7.1.1 Der Schwerpunkt
295
Wir betrachten ein System, das aus N Teilchen mit den (konstanten)
Massen m1, m2, m3, ... = mi (i=1,N) besteht, die relativ zu einem Inertialsystem die Ortsvektoren
r
r
r
r
(i = 1,..., N )
ri = x iex + y iey + ziez
haben.
Physik
296
Teilchen, Atome und Moleküle
i =1, N
∑m
i
= m1 + m2 + ...
Die Gesamtmasse M des Systems ist
M=
i =1, N
(
)
Der Schwerpunkt des Teilchensystems wird definiert als der Punkt,
der durch den Ortsvektor
r
r
r
r
r
MrSP ≡ ∑ mi ri = ∑ mi x iex + y iey + ziez
i =1, N
r
r
r
= ∑ m i x i ex + ∑ m i y i ey + ∑ m i z i ez
i =1,N
i =1,N
i =1,N
i i
∑mx;
i =1, N
My SP =
i i
∑my
i =1, N
und
MzSP =
i =1, N
i i
∑mz
gegeben ist. Diese Vektorgleichung ist im Fall von 3 Dimensionen
äquivalent zu den folgenden Koordinatengleichungen:
Mx SP =
Beispiel: Zwei Teilchen der Masse m1 und m2 mit dem Abstand d.
Wir wählen das Koordinatensystem so, dass x1 und x2 die Teilchenkoordinaten in der x-Richtung sind. Zusätzlich können wir annehmen,
dass x1=0, d.h. der Ursprung des Koordinatensystems fällt mit dem
Zentrum der Masse m1 zusammen.
Siehe Abb. 1.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
m1
y
x1 O
m2
x x2
SP
d
d
2
x
mx +m x
m0+m d
m
1
∑ m x = 1m1 + m2 2 = m1 + m2 = m +2m d
M i =1,N i i
1
2
1
2
1
2
Ein System mit zwei Teilchen.
Teilchensysteme
Figur 1.
Es gilt
x SP =
Spezialfälle:
m2 = 0: x SP = 0
m1 = 0: x SP = d
m1 = m2 : x SP =
297
Für Teilchen gleicher Masse liegt der Schwerpunkt auf der halben
Strecke zwischen den beiden Teilchen. Sonst liegt er näher beim Teilchen mit der grösseren Masse.
Physik
298
Teilchen, Atome und Moleküle
7.1.2 Kontinuierliche Massenverteilung
Einen gewöhnlichen Gegenstand, wie z.B. einen Stab, kann man sich
aus sehr vielen “Teilchen” bestehend vorstellen.
Wir betrachten deshalb einen Gegenstand so, als ob er eine kontinuierliche Masseverteilung besitzen würde.
dm
dm
= r
dxdydz d 3 r
Seine Dichte wird definiert als eine Funktion der Raumkoordinaten:
r
ρ( r ) = ρ( x, y, z) =
wobei dxdydz ein differentielles Volumenelement und dm die darin
enthaltene Masse ist.
Für einen homogenen Körpers ist die Dichte innerhalb des Körpers
konstant und gleich
r
M
ρ( r ) = ρ =
V
wobei M die Gesamtmasse und V das Gesamtvolumen des Körpers
ist. Es gilt (wir betrachten den dreidimensionalen Fall)
M = ∫ dm = ∫∫∫ ρ( x, y, z) dxdydz
Der Schwerpunkt wird durch das Ersetzen der Summe durch ein Integral gefunden
r
r
r r
MrSP ≡ ∫ rdm = ∫∫∫ r ρ( r ) dxdydz
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
oder
Mx = xdm =
∫∫∫ xρ( x, y, z)dxdydz
SP ∫
My SP = ∫ ydm = ∫∫∫ yρ( x, y, z) dxdydz
MzSP = ∫ zdm = ∫∫∫ zρ( x, y, z) dxdydz
Beispiel: Schwerpunkt einer homogenen Scheibe mit Radius 2R mit
einem Loch vom Radius R.
Siehe Abb. 2.
Wir benutzen eine Anordnung des Koordinatensystems, wie in Abb. 2
gezeigt.
1
1
ydm = ∫∫ yρ( x, y ) dxdy
M∫
M
Die y-Koordinate des Schwerpunkts ist gleich
y SP =
y SP
1
=
yρ( x, y ) dxdy
M ∫∫
1
1
yρdxdy +
yρdxdy
M y∫∫
M y∫∫
<0
>0
=
=0
299
Die Verteilung der Masse ist symmetrisch um die x-Koordinatenachse. Es folgt
Physik
300
2
y
2R
S
Homogene Scheibe mit einem Loch.
S
R
Teilchen, Atome und Moleküle
Figur 2.
1
= M S 1− S 2 x SP
x
Um die x-Koordinate des Schwerpunkts zu bestimmen, betrachten
wir die zwei Scheiben S1 und S2, wobei S1 eine homogene Scheibe
mit Radius 2R und S2 eine homogene Scheibe mit Radius R ist.
Es gilt
=− M S2 R
∫∫S xρdxdy = ∫∫S xρdxdy + S ∫∫S xρdxdy
1
2
1− 2
1
424
3 1
424
3 1
4243
=0
⇒ 0 = − M S2 R + M S1 − S2 x SP
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
und
x SP =
M
S2
M S1 − S2
R=
(
ρπR 2
2
ρ π (2 R) − πR 2
7.1.3 Innere und äussere Kräfte
)
R=
1
R
3
Wir betrachten eine Anordnung, in der zwei Massen m1 und m2 durch
eine Feder mit der Federkonstante k verbunden sind. Wenn die Feder
gedehnt wird, werden sich die Massen in relativer Schwingungsbewegung befinden.
Wir beginnen mit dem Fall, in dem die Massen nur ihre gegenseitigen
Wechselwirkungen spüren, d.h., es wirkt nur die Feder auf sie und
keine anderen Kräfte (z.B. Gravitationskraft).
Man spricht von einer inneren Kraft (oder internen Kraft) für die
Federkraft und von äusseren Kräften für die anderen, d.h., wir betrachen den Fall, in dem keine äusseren Kräften (oder externen
Kräfte) wirken.
m1
r
dv1 r
= F12
dt
r
r
F12 = − F21
und
m2
r
dv 2 r
= F21
dt
r
r
F12 = F21 = kx
301
Die Bewegungsgleichung für jede Masse relativ zu einem Inertialbeobachter O ist
wobei
Physik
302
12
1
F
21
m2
Zwei Massen, die durch eine Feder verbunden sind.
m
F
Teilchen, Atome und Moleküle
Figur 3.
1
d r r
1r
(v − v ) = + F
dt 1 2 m1 m2 12
Die Kräfte zeigen längs der Linie, die die zwei Massen verbindet. x
ist die Dehnung der Feder.
Es folgt
r
r
r
r
dv1 dv 2 F12 F21
−
=
−
⇒
dt
dt
m1 m2
Die Geschwindigkeit von m1 relativ zu m2 ist gleich
r r r
v1 - v 2 = v12
und deshalb
r
r
µa12 = F12
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
und
r
r
dv
a12 = 12
dt
wobei wir die reduzierte Masse µ und die relative Beschleunigung
definiert haben
1 1
1
= +
µ m1 m2
k
µ
Es folgt, dass die relative Bewegung der Masse ganz einfach zu
beschreiben ist. Die Massen schwingen mit einer Frequenz
ω=
wobei µ die reduzierte Masse ist. Um die Wirkung von äusseren Kräften zu verstehen, werden wir die Bewegung des Schwerpunkts analysieren.
7.1.4 Dynamik des Schwerpunkts
Wir betrachten nun den Fall, in dem interne und externe Kräfte auf
die Massen eines Teilchensystems wirken.
r
i i
∑mr
i =1, N
Wenn wir die zeitliche Ableitung der Gleichung des Schwerpunkts
nehmen, erhalten wir die Geschwindigkeit des Schwerpunkts
r
r
r
r
dr
d
⇒ Mv SP =
∑ mr = ∑ m i = ∑ mv
dt i =1,N i i i =1,N i dt i =1,N i i
r
MrSP =
r
r
r
r
d
MaSP =
∑ mv = ∑ ma = ∑ F
dt i =1,N i i i =1,N i i i =1,N i
303
Wir differenzieren noch einmal, um die Beschleunigung des Schwerpunkts zu erhalten
Physik
304
Teilchen, Atome und Moleküle
i =1, N
(
i
i i
)
i =1, N
i =1, N
wobei wir das zweite Newtonsche Gesetz benutzt haben, um die auf
die Masse i resultierende Kraft zu ersezten
r
r
F =ma
i =1, N
Wir unterteilen die resultierende Kraft in interne und externe Teile:
r
r
r
r
r
r
MaSP = ∑ Fi = ∑ Fi,int + Fi,ext = ∑ Fi,int + ∑ Fi,ext
Das Aktion-Reaktion Gesetz: Wie nehmen an, dass die internen
Kräfte zwischen Paaren von Teilchen wirken.
Wir betrachten z.B. ein System mit drei Teilchen, die durch Federn
verbunden sind. Die Kräfte, die auf die Massen wirken, können in
Paaren von Kräften zusammengefasst werden, die mit demselben
Betrag aber entgegengesetzter Richung wirken
r
r
r
r
r
r
F12 = − F21; F13 = − F31; F23 = − F32
Diese Eigenschaft von Kräften wird als drittes Newtonsches Gesetz
(oder Aktion-Reaktion Gesetz) bezeichnet.
Das dritte Newtonsche Gesetz folgt aus der Erhaltung des Impulses
eines isolierten Systems. Wenn wir zwei isolierte aufeinander wirkende Massen wie in Abb. 3 betrachten, dann folgt aus dem Prinzip
der Erhaltung des Gesamtimpulses, dass
r
r
r
dP d ( p1 + p2 )
=
=0
dt
dt
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
m
1
F
F
12
13
F
31
F
3
m
21
F
2
m
32
23
F
Figur 4. Ein System mit drei Teilchen, die durch Federn verbunden sind. Die
Kräfte, die auf die Massen wirken, können in Paaren zusammengefasst
werden.
Es gilt
r r
r
r
r
r
dv
dv
d ( p1 + p2 ) dp1 dp2
=
+
= m1 1 + m2 2
dt
dt
dt
dt
dt
r
r
= m1a1 + m2 a2
r
r
r
r
= F12 + F21 = 0
⇒ F12 = − F21
=0
r
r
r
r
Ma = ∑ Fi,int + ∑ Fi,ext = ∑ Fi,ext
i =1, N
i =1, N
12
4 4
3 i =1,N
SP
305
Bewegungsgleichung des Schwerpunkts. Das dritte Newtonsche
Gesetz wird benutzt, um die Bewegungsgleichung des Schwerpunkts
zu vereinfachen
Physik
306
Teilchen, Atome und Moleküle
Weil wir über alle Teilchen im System summieren, kompensieren
sich die internen Kräfte gegenseitig, und übrig bleiben nur die externen Kräfte.
Die Gleichung der Bewegung des Schwerpunkts hat die gleiche Form wie das zweite Newtonsche Gesetz für einen Körper
der Masse M, die sich im Schwerpunkt befindet und die Wirkung der resultierenden äusseren Kräfte spürt.
Es folgt daraus, dass sich der Schwerpunkt so bewegt, als ob die
Gesamtmasse im Schwerpunkt konzentriert wäre.
Wenn keine resultierende Kraft auf das Teilchensystem wirkt, bewegt
sich der Schwerpunkt mit konstanter Geschwindigkeit.
i =1, N
r
r
P = Mv SP
Gesamtimpuls des Teilchensystems. Aus der zeitlichen Ableitung
der Definition des Schwerpunkts folgt
r
r
Mv SP = ∑ miv i
i
oder
Da der Impuls eines Teilchens gleich
r
r
pi = miv i
r
∑ p = Gesamtimpuls des Systems
i =1, N
ist, können wir schreiben
r
r
r
P
1
v SP =
∑p=
M i =1,N i M
wobei
r
P≡
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
Daraus können wir schliessen, dass der Gesamtimpuls eines Systems
so erscheint, als ob die Gesamtmasse im Schwerpunkt konzentriert
wäre und sich mit einer Geschwindigkeit v SP bewegt.
Deshalb wird v SP als Systemgeschwindigkeit bezeichnet. Wenn wir
von der Geschwindigkeit eines Körpers sprechen, der aus vielen Teilchen besteht, wie z.B. ein Flugzeug oder ein Auto, oder die Erde oder
der Mond, beziehen wir uns auf die Geschwindigkeit seines Schwerpunkts.
m2
2
v
e
v2=0
Holzklotz
Beispiel: Ein Geschoss wird auf einen Holzklotz abgefeuert. Wir nehmen an, dass keine resultierende äussere Kraft wirkt, d.h., der Holzklotz bewegt sich reibungsfrei auf dem Boden.
Siehe Abb. 5.
Kugel v
1
m1
Reibungsfreie Bewegung
1
m +m
307
Figur 5. Geschoss auf Holzklotz. Da keine äussere resultierende Kraft wirkt,
sind der Gesamtimpuls und die Geschwindigkeit des Schwerpunkts vor
und nach dem Stoss gleich.
Physik
308
Teilchen, Atome und Moleküle
i
2
Vor dem Stoss: am Anfang sind die Impulse der Massen gleich
r
r
r
p1 = m1v1 und p2 = 0
r
∑p=
1
Die Geschwindigkeit des Schwerpunkts ist
r r
r
p1 + p2
m1v1
=
M
m +m
r
1
v SP =
M
i =1, N
Nach dem Stoss: das Geschoss und der Holzklotz kleben zusammen.
Der Endimpuls ist gleich
r
r
pe = ( m1 + m2 )v e
r
i, ext
∑F
i =1, N
=0
r
⇒ v SP = Konst.
r
MaSP =
⇒
r
aSP = 0
Da keine resultierende äussere Kraft wirkt, ist die
Geschwindigkeit des Schwerpunkts vor und nach dem Stoss
dieselbe.
Und deshalb
r r
v e = v SP
Teilchensysteme
7.1.5 Das ballistische Pendel
Bei einem ballistischen Pendel wird ein Klotz als Pendel aufgehängt.
Siehe Abb. 6.
Ein Geschoss wird auf den Klotz abgefeuert. Nach dem Aufprall werden das Geschoss und der Klotz zusammenkleben. Das GeschossKlotz-System wird zu einer Höhe h ausgelenkt.
Mit Hilfe der Impulserhaltung können wir die Projektilgeschwindigkeit bestimmen.
∆x ≈ 25cm
h = l(1 − cosθ ) ≈ 0, 58 cm
∆x ≈ lθ ⇒ l = 535cm
⇒ θ ≈ 2, 7°
Experiment: Ballistisches Pendel. Das Geschoss wird abgefeuert.
Wir messen den Ausschlag ∆x des Pendels. Die Länge des Pendels
wird als l bezeichnet.
und
Während des Aufpralls bleibt der Gesamtimpuls erhalten, d.h. der
Anfangsimpuls ist gleich dem Endimpuls. Es folgt
Geschoss − Klotz − System
mv
m + M )vGK
{G = (1
4243
Geschoss
wobei m die Masse des Geschosses, M die Masse des Klotzes, vG die
Geschwindigkeit des Geschosses (vor dem Aufprall) und vGK die
Geschwindigkeit des Geschoss-Klotz-Systems nach dem Aufprall ist.
Der Endimpuls ist
r
r
r
r
r r
m1v1
= m1v1 = p1
pe = ( m1 + m2 )v e = ( m1 + m2 )v SP = ( m1 + m2 )
m1 + m2
Wir haben explizit bewiesen, dass der Gesamtimpuls erhalten ist.
Physik
309
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
310
Teilchen, Atome und Moleküle
l
θ
Ausschlag ∆x
Ein ballistisches Pendel.
Kugel
m
h
m+M
m+M
m + M
vGK =
vG =
2 gh
m
m
700 g
≈
2(9, 81m / s2 )(0, 58 × 10 −2 m)
1g
≈ 240 m / s
Es gilt für m=1 g und M+m=700 g
Figur 6.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
7.1.6 Das Schwerpunktssystem
Wir haben ein Beispiel betrachtet, in dem zwei Massen durch eine
Feder verbunden waren. Wir haben gesehen, dass die relative Bewegung der Massen ziemlich einfach ausgedrückt werden konnte.
Im Allgemeinen ist es oft praktisch, ein Koordinatensystem zu wählen, dessen Ursprung im Schwerpunkt des Systems liegt. Oft können
Vorgänge leichter relativ zum Schwerpunkt untersucht werden.
O
yL
ySP
SP
zSP
xL
xSP
311
Wir definieren das SP-Bezugssystem mit Koordinatenachsen XSP,
YSP, ZSP als das System, das mit dem Schwerpunkt des Teilchensystems zusammenfällt. Das L-Bezugssystem (oder Labor-Bezugssystem) ist relativ zu einem Inertial-Beobachter fixiert. Siehe Abb. 7.
zL
Figur 7. Das Labor- und das Schwerpunktsbezugssystem. Die
Koordinatenachsen müssen nicht parallel sein.
Physik
312
Teilchen, Atome und Moleküle
Im Allgemeinen sind die Achsen des L- und SP-Bezugssystems nicht
parallel zueinander.
Wenn das Teilchensystem z.B. eine bestimmte Symmetrie besitzt,
kann man die Richtung der Achsen des SP-Koordinatensystems so
definieren, dass die Symmetrie respektiert wird.
r
= Mv SP ≡ 0
Relativ zum SP-Bezugssystem befindet sich der Schwerpunkt in
Ruhe! Es folgt, dass der Gesamtimpuls relativ zum SP-Bezugssystem
gleich null ist
r
P
SP
{
bezüglich SP
Deshalb wird das SP-Bezugssystem auch als Nullimpuls-Bezugssystem bezeichnet.
Beispiel: Wir untersuchen das Beispiel mit dem Geschoss auf den
Holzklotz im Schwerpunktsystem.
Siehe Abb 8.
Vor dem Stoss: Bezüglich des Schwerpunktsystems sind die
Geschwindigkeiten des Geschosses und des Holzklotzes vor dem
Stoss gegeben durch
r
r
r
r
r
m2 r
m1v1
m1 r
v
= 1 −
v1,SP = v1 − v SP = v1 −
v =
m1 + m2 m1 + m2 1 m1 + m2 1
vr = vr − vr = − m1 vr
2, SP
2
SP
m1 + m2 1
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
Vor dem Stoss:
v1,SP
Im SP
v2,SP
ve,SP=0
p1+p2=0
pe=0
Geschoss-Holzklotz-Stoss im Schwerpunktssystem.
Nach dem Stoss:
Figur 8.
Der Gesamtimpuls bezüglich des SP ist gleich
m r
r
r
m1 r
2
v1
p1,SP + p2,SP = m1
v1 + m2 −
m1 + m2
m1 + m2
=0
wie erwartet. Bezüglich des SP haben beide Körper gleich grosse
und entgegengesetzte Impulse.
313
Nach dem Stoss: das Geschoss steckt im Holzklotz. Der Schwerpunkt bewegt sich mit derselben Geschwindigkeit wie das GeschossHolzklotz-System. Bezüglich des SP ist diese Geschwindigkeit
gleich null. Der Endimpuls ist desalb null und gleich dem Anfangsimpuls, d.h. der Impuls wurde während des Stosses erhalten.
Physik
314
Teilchen, Atome und Moleküle
7.1.7 Kinetische Energie des Teilchensystems
∑E
i =1, N
kin , i
=
1
r
2
i i
∑ 2mv
i =1, N
Die kinetische Energie des Teilchensystems ist die Summe der kinetischen Energien der einzelnen Teilchen
E kin =
bezüglich SP
r 2
1
∑ m (v )
2 =1,N i i,SP
1i 4
42443
i =1, N
∑ p i , SP = 0
Die Geschwindigkeit eines Teilchens kann geschrieben werden, als
die Summe der Schwerpunktsgeschwindigkeit und der Geschwindigkeit des Teilchens relativ zum Schwerpunkt:
r r
r
v i = v SP + v i,SP
{
Es folgt
E kin
r 2
1
M (v SP ) +
2 424
1
3
kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt
r
r 2
1 r
1
= ∑ miv i2 = ∑ mi (v SP + v i,SP )
2
,
=
1
i =1, N 2
i
N
r 2 1
r 2 r
r
1
= ∑ m (v ) + ∑ m (v ) + v ∑ miv i,SP
SP
2 i =1,N i SP
2 i =1,N i i,SP
i =1, N
142
43
r
=
kinetische Energie
des Schwerpunkts
Wir haben das Ergebnis benutzt, dass der Gesamtimpuls relativ zum
Schwerpunkt gleich null ist.
Die kinetische Energie ist die Summe von zwei Termen: die
kinetische Energie des Schwerpunkts und die kinetische Energie der einzelnen Teilchen relativ zum Schwerpunkt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
7.1.8 Gesamtenergie eines Teilchensystems
Wir betrachen den Fall, in dem interne und externe Kräfte auf die
Teilchen wirken. Wir nehmen an, dass alle Kräfte konservativ sind,
d.h., sie können mit Hilfe einer potentiellen Energie beschrieben werden.
∑E
i =1, N
kin , i
+
∑E
i =1, N
pot , i
r 2
1
∑ m (v )
2 =1,N i i,SP
1i 4
42443
kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt
+ E pot ,externe + E pot, interne
Die Gesamtenergie ist die Summe der kinetischen und potentiellen
Energien
E=
r 2
1
= M (v SP ) +
2 4243
1
kinetische Energie
des Schwerpunkts
i =1, N
Mh SP
i =1, N
E pot ,i = ∑ mi ghi = g ∑ mi hi = gMhSP
12
4 4
3
Wir betrachten z.B. die äussere Gravitationskraft. Die externe potentielle Energie des Teilchensystems ist gleich
∑
i =1, N
wobei hi die Höhe der einzelnen Teilchen und hSP die Höhe des
Schwerpunkts ist. Die externe potentielle Energie ist die gleiche, wie
wenn die Gesamtmasse im Schwerpunkt konzentriert wäre.
Die innere potentielle Energie entspricht den inneren Kräften, die
zwischen Teilchenpaaren wirken. Sie hängt oft nur vom Abstand zwischen einem Teilchenpaar ab. In diesem Fall ist die innere potentielle
Energie unabhängig vom Bezugssystem, weil sie nur vom Abstand
abhängt.
315
Die innere Energie U des Systems wird definiert als die Summe der
kinetischen Energien der Teilchen relativ zum Labor-System und
Physik
316
Teilchen, Atome und Moleküle
+E
pot, interne
r2
1
= ∑ miv i + E pot, interne
2 i =1,N
ihrer inneren potentiellen Energie, welche nach unserer Annahme
unabhängig vom Bezugssystem ist
U=E
kin
E=
U
{
innere Energie
+
E pot ,externe
14
24
3
potentielle Energie der
äusseren Kräfte
Die Gesamtenergie, im Fall, dass nur konservative äussere Kräfte
wirken, ist dann gleich
7.1.9 Stossvorgänge
Man spricht von einem Stoss, wenn
1.
2.
zwei oder mehr Teilchen (Körper) sich einander nähern;
die Teilchen mit relativ grossen Kräften kurzzeitig wechselwirken.
Wir nehmen an, dass ein Stoss ziemlich schnell geschieht, so dass
die Wirkung der äusseren Kräfte relativ zur Wirkung der inneren
Kräfte als vernachlässigbar betrachtet werden kann.
Während des Stosses wird Impuls zwischen den Teilchen übertragen.
Aber wenn nur innere Kräfte ins Spiel kommen, bleibt der Gesamtimpuls der Teilchen erhalten.
Impulserhaltung:
nach
vor
r
r
∑ pi′ = ∑ pi = Erhaltung des Gesamtimpulses
i =1, N
i =1, N
1
23 1
23
Erhaltung der kinetischen Energie: Wenn alle Kräfte konservativ
sind, d.h., sie können mit Hilfe einer potentiellen Energie beschrieben
werden, ist die Gesamtenergie des Teilchensystems gleich
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
E=
=
∑E
i =1, N
U
{
kin , i
innere Energie
+
+
∑E
i =1, N
pot , i
E pot ,externe
14
24
3
potentielle Energie der
äusseren Kräfte
= Konst.
= E kin + E pot, interne = Konst.
und diese Energie wird erhalten. Wenn zusätzlich nur innere Kräfte
ins Spiel kommen, wie im Fall eines kurzzeitigen Stosses, wird die
innere Energie erhalten
U
{
innere Energie
Die innere potentielle Energie entspricht der relativen Anordnung des
Teilchens. Es folgt, dass die kinetische Energie sich wegen der Möglichkeit innerer Umordnungen der Teilchen während des Stosses verändern kann.
Die kinetische Energie nimmt bei einer Zunahme der inneren Energie
ab, und nimmt auf Kosten der inneren Energie des Teilchens zu.
Wenn nicht-konservative Kräfte wirken, wird die von den nicht-konservativen Kräften geleistete Arbeit die kinetische Energie des
Systems auch modifizieren.
nach
vor
Q ≡ E kin ( nach ) − E kin (vor)
r 2 1
r 2
1
= ∑ miv i′ − ∑ miv i,vor
2 =1,N
2 =1,N
1i 4
243 1i 4
4244
3
317
Im Allgeimeinen heisst der Wert der Änderung der kinetischen Energie Q-Wert der Reaktion:
Physik
318
Teilchen, Atome und Moleküle
Elastischer Stoss: Q=0
Inelastischer Stoss
Wir unterscheiden:
1.
2.
Q > 0: exoenergetisch E kin ( nach ) > E kin (vor)
Q < 0: endoenergetisch E kin ( nach ) < E kin (vor)
Wenn alle Körper nach dem Stoss zusammenkleben, heisst der Stoss
total inelastisch. In diesem Fall müssen die Endgeschwindigkeiten
der Teilchen gleich der Geschwindigkeit des Schwerpunkts sein
r
r
v{i′ = v SP i = 1,..., N
nach
Das ballistisches Pendel und das Geschoss-Holzkoltz Beispiel entsprechen total inelatischen Stössen.
Beispiel: Wir betrachten das Geschoss-Holzkoltz Beispiel im LaborSystem.
Siehe Abb. 5.
1 r2
mv
2 11
Vor dem Stoss: Die anfängliche Energie des Systems ist die kinetische Energie des Geschosses
E vor =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
Nach dem Stoss: Die kinetische Energie ist die kinetische Energie
des Geschoss-Holzklotz-Systems
E nach
r
r2
1
1
= ( m1 + m2 )v e2 = ( m1 + m2 )v SP
2
2
2
r
r
m
v
m
1
1
(m + m2 ) m +1 m1 = 2 m +1m m1v12
2 1
1
2
1
2
=
m1
=
E vor < E vor
m1 + m2
Ein Teil der kinetischen Energie geht verloren, d.h. Q<0 (endoenergetisch), weil die Kräfte zwischen Geschoss und Holzklotz nicht konservativ sind. Ein Teil wird in thermische Energie umgewandelt, ein
Teil produziert die Verformungen von Geschoss und Holzklotz.
Zusätzlich geht ein Teil in die Energie der Schallwellen, die während
des Stosses erzeugt werden.
Q ≡ E nach − E vor
Der Q-Wert der Reaktion ist gleich
oder
m1
Q ≡ E nach − E vor =
E vor − E vor
m1 + m2
m2
= −
E vor < 0
m1 + m2
319
7.1.10 Stossvorgänge im Labor- und SP-Bezugssystem
Wir analysieren nun denselben Stoss bezüglich des SP.
Physik
320
m
2
ySP
2
v =0
vSP
2
Holzklotz
Im Labor
Kugel v
1
m
1
Teilchen, Atome und Moleküle
Siehe Abb. 9.
Vor dem Stoss:
1
m +m
Ekin>0
Ekin>0
xSP
v
1,SP
v
ve,SP=0
Im SP
2,SP
m1+m2
Total inelastischer Stoss im Labor- und im SP-System.
Nach dem Stoss:
Figur 9.
2
p +p =0
1
Ekin,SP>0
p =0
e
Ekin,SP=0
Die ursprüngliche kinetische Energie des Kugel-Holzklotz-Systems
im SP ist
2
m1 r
1 m2 r
1
v
v + m2 −
m
2 1 m1 + m2 1
2 m1 + m2 1
2
1 r2
1 r
mv + m v2
2 1 1,SP 2 2 2,SP
=
r
r
m2
m1
1
1
m m v2 +
m m v2
2 ( m1 + m2 ) 2 1 2 1 2 ( m1 + m2 ) 2 1 2 1
E kin ,SP =
=
1 m2 r 2 m2
=
mv =
E
2 m1 + m2 1 1 m1 + m2 vor
E kin ,SP = 0
Nach dem Stoss ist die kinetische Energie gleich null:
Nach dem Stoss:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
Der Q-Wert der Reaktion bezüglich des SP ist deshalb gleich
QSP ≡ E kin ,SP ( nach ) − E kin ,SP (vor)
m2
= 0−
E vor
m1 + m2
m2
= −
E vor = Q
m1 + m2
Er ist gleich demjenigen bezüglich des Labor-Systems.
Die Werte der kinetischen Energie sind unterschiedlich im Lund SP-System, die verlorene Energie, die in andere Formen
von Energie umgewandelt wird, d.h. der Q-Wert, ist aber dieselbe in beiden Systemen.
7.1.11 Elastischer Stoss in zwei Dimensionen
Wir betrachten zwei Teilchen mit den Massen m1 und m2. Das Teil-
321
chen 1 bewegt sich mit dem Impuls p 1 . Das Teilchen 2 befindet sich
ursprünglich in Ruhe, d.h. p 2 = 0 (“stationäres Target”).
Impulserhaltung:
nach
r
r r
p1 = p1′ + p2′
{
1
424
3
vor
Energieerhaltung: Elastischer Stoss Q=0
1 r2 1 r 2 1 r 2
m v = m v ′ + m1v 2′
2 11 2 11
2
Wir benutzen die Koordinaten, wie in Abb. 10 gezeigt.
Physik
322
v
y
2
v =0
m2
x
Impulse vor und nach einem Stoss.
1
Teilchen, Atome und Moleküle
m1
Figur 10.
y
1
v '
θ1
θ2
v2 '
x
Wir drücken die Endimpulse mit Hilfe von ihren Komponenten aus
und mit Hilfe der Beträge der Impulse und zwei Winkeln
r
r
r
p1′ = p1′x ex + p1′y ey = m1v1′ cosθ1; m1v1′ sin θ1
r
p2′ = m2v 2′ cosθ 2 ; m2v 2′ sin θ 2
Es folgt aus der Impulserhaltung
m1v1 = m1v1′ cosθ1 + m2v 2′ cosθ 2
0 = m1v1′ sin θ1 + m2v 2′ sin θ 2
und die Erhaltung der kinetischen Energie ist
1
1
1
m v 2 = m v ′ 2 + m1v 2′ 2
2 11 2 11
2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Teilchensysteme
wobei v1, v1’ und v2’ die Beträge der Geschwindigkeiten vor und
nach dem Stoss sind. Wir erhalten 3 Gleichungen mit 4 Unbekannten:
v1’ , v2’, θ1 und θ2.
Zur Lösung ist noch eine weitere Bedingung notwendig.
Man muss z.B. einen Winkel in einem bestimmten Stoss messen, um
die anderen Grössen zu berechnen.
Wir betrachten den speziellen Fall, in dem beide Teilchen dieselbe
Masse besitzen
m1 = m2
r
r
r 2 r
r r
r
p12 = p1′ + p2′ = p1′ 2 + 2 p1′ ⋅ p2′ + p2′ 2
323
Wir bemerken, dass die kinetische Energie eines Teilchens immer als
Funktion seines Impulses ausgedrückt werden kann
r
r
1 r2
1
p2
mv =
(mv ) 2 =
2
2m
2m
E kin =
Wir schreiben die Beziehung für die kinetische Energie (Q=0) als
r
r
r
p12
p′ 2
p′ 2
= 1 + 2
2 m1 2 m1 2 m2
Wenn beide Teilchen dieselbe Masse besitzen
r
r
r
p12 = p1′ 2 + p2′ 2
m1 = m2 ⇒
⇒
Aus der Impulserhaltung folgt aber
nach
r r
r
p1 = p1′ + p2′
{
1
424
3
vor
Physik
324
Teilchen, Atome und Moleküle
⇒
r r
p1′ ⊥p2′
und deshalb müssen nach dem Stoss die Teilchen unter 90° auseinanderfliegen
r r
2 p1′ ⋅ p2′ = 0
Experiment:Stoss mit Luftkissenbüchsen. Bei gleichen Massen wird
der Winkel 90°.
7.1.12 Relativistischer Stoss
Bis jetzt haben wir Stossvorgänge betrachtet, in denen die Teilchen
sich mit Geschwindigkeiten viel kleiner als die Lichtgeschwindigkeit
bewegten.
Was passiert, wenn wir annehmen, dass die Teilchen sich relativistisch bewegen?
Teilchensysteme
E = γm0c 2
Wir bemerken, dass in relativistischen Stössen die Energie eines Teilchens seiner Gesamtenergie entspricht, wobei die Gesamtenergie
gleich
ist.
Wegen der Masse-Energie-Äquivalenz, entspricht die Masse eines
Teilchens einer Form von Energie, und die Masse kann deshalb wie
andere Formen von Energien während eines Stosses umgewandelt
werden.
D.h., im Allgemeinen kann sich die Zahl der Teilchen während eines
Stosses ändern
nach
p1µ + p2µ = ∑ pi′ µ
12
4 4
3 i =1,N
vor
123
wobei N die Endzahl von Teilchen mit Massen m’i ist.
Beispiel: N=1. Ein schweres Teilchen kann während eines Stosses
von zwei leichten aber schnell bewegten Teilchen erzeugt werden.
Wir nehmen an, dass das während des Stosses erzeugte schwere Teilchen sich in Ruhe befindet.
Um relativistische Stossvorgänge zu beschreiben, müssen wir die
relativistischen Impulse und Energien benutzen. Man verwendet
gewöhnlich die Energie-Impuls 4-Vektoren des Teilchens (Siehe
Kap. 6.9)
Wenn wir z.B. den Stoss zweier Teilchen betrachten
r
r
Vor dem Stoss: p1µ = ( E1, p1c ); p2µ = ( E 2 , p2c )
r
r
Nach dem Stoss: p1′ µ = ( E1′, p1′c ); p2′ µ = ( E 2′ , p2′ c )
p′ µ = ( Mc 2 , 0)
Ruhemasse des schweren Teilchen: M
nach
Ruhemassen der leichten Teilchen: m1 und m2
r
r
p1µ = ( E1, p1c ) und p2µ = ( E 2 , p2c )
Physik
325
Die relativistische Energie-Impulserhaltung wird geschrieben als
vor
p1µ + p2µ = p1′ µ + p2′ µ
12
4 4
3 1424
3
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
326
Teilchen, Atome und Moleküle
Es muss gelten
deshalb
vor
nach
r
r
r
p1 = − p2 ≡ p
p1µ + p2µ = {
p′ µ
12
4 4
3
r
r
p1c + p2c = 0 ⇒
E =
2
2 2
r
(− pc ) + (m c )
2
Wie erwartet müssen beide Teilchen Impulse mit demselben Betrag
aber entgegengesetzter Richtung besitzen, um die schwere Masse M
in Ruhe zu erzeugen. Der Schwerpunkt nach dem Stoss liegt in der
Masse M und befindet sich in Ruhe. Deshalb muss der Schwerpunkt
vor dem Stoss sich auch in Ruhe befinden. Es folgt, dass beide Teilchen entgegengesetze und im Betrag gleiche Impulse besitzen.
2 2
2
Mc 2 = E1 + E 2
1
r
( pc ) + (m c )
2
Es gilt für die erzeugte Masse M
wobei
E =
1
Wenn beide Teilchen gleiche Masse haben
m1 = m2 = m
⇒ E1 = E 2 = E
2 E 2γmc 2
=
= 2γm > 2 m
c2
c2
Atome
Beispiel: zwei gleiche Massen mit je m = 1g und einer Geschwindigkeit β=0.95c stossen aufeinander.
M = 2γm ≈ 2( 3, 2)(1g) = 6, 4 g
Wir stossen zwei Massen von je 1g und erhalten eine ruhende Masse
von ≈6,4g.
7.2 Atome
7.2.1 Die Bausteine der Materie
Obwohl die Materie nach den Wahrnehmungen unserer Sinnesorgane
eine kontinuierliche Struktrur zu haben scheint, setzt sie sich in Wirklichkeit aus Einheiten zusammen, welche sich zu regelmässigen
Anordnungen gruppieren, wie die Ziegel in einer Mauer.
Diese fundamentalen Grundbausteine werden als Elementarteilchen
oder Partikel bezeichnet.
Alle Körper (lebend wie tot) sind aus verschiedenen Gruppierungen
solcher Teilchen aufgebaut.
Drei Arten von Elementarteilchen sind besonders wichtig: das Elektron, das Proton und das Neutron.
Die meisten Phänomene, die wir in dieser Vorlesung betrachten, können als Wechselwirkungen zwischen diesen drei Arten von Teilchen
beschrieben werden. Die Existenz dieser Teilchen lässt sich aber nur
⇒ M=
Da M>2m, wird kinetische Energie in Masse umgewandelt!
Physik
327
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
328
Teilchen, Atome und Moleküle
unter Verwendung ziemlich aufwendiger Beobachtungsmethoden
feststellen.
7.2.2 Die Elektrische Ladung
Die Elementarteilchen werden durch ihre physikalischen Eigenschaften unterschieden.
Jedes Teilchen wird daher durch zwei unabhängige und fundamentale
Eigenschaften charakterisiert: seine Ruhemasse m0 und seine elektrische Ladung q.
Die elektrische Ladung ist wirklich eine fundamentale Eigenschaft
der Materie. Sie ist, wie die Ruhemasse, relativistisch invariant
(Siehe Kap. 6.9), d.h., die elektrische Ladung eines Teilchens ist für
alle Beobachter gleich.
Protonen “elektrisch positiv geladen” sind
⇒ Das Proton hat genaue die gleiche Ladung wie das Elektron,
qe = −e
Elektronen “elektrisch negativ geladen” sind
⇒ jedes Elektron besitzt eine negative elementare Ladung
me = 9,1093897 × 10 −31 kg
mn = 1, 6749286 × 10 −27 kg
m p = 1, 6726231 × 10 −27 kg
Protonen und Neutronen ungefähr die gleichen Ruhemassen
haben, die etwa 1840-mal grösser als die Ruhemasse des Elektrons
sind
Experimentell beobachten wir, dass
1.
2.
3.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Neutronen “elektrisch ungeladen” sind, d.h. neutral
q p = +e
aber mit entgegengesetztem Vorzeichen
Atome
4.
qn = 0
Wir sagen, dass die Ladung quantisiert ist, d.h., wir beobachten, dass
die Ladung eines beliebigen Körpers immer nur als Vielfaches der
Ladung “e” vorkommt.
Deshalb wird die Ladung “e” Elementarladung genannt. Sie ist mit
der Ladung des Elektrons oder Protons verknüpft:
qe = q p = e
Die MKSA Einheit der Ladung ist das Coulomb1 (C). Mit dieser
Einheit ist die Elementarladung gleich
e ≡ 1, 60217 × 10 −19 C
Addition der Ladung. Die Gesamtladung eines Körpers wird als
die Summe der einzelnen Ladungen bestimmt
i
Q = ∑ qi
i
i
∑q = 0
329
Ein neutraler Körper hat eine verschwindende Gesamtladung. D.h., er
besitzt eine gleiche Anzahl von positiven und negativen Ladungen
1. Charles de Coulomb, 1736-1806.
Physik
330
Teilchen, Atome und Moleküle
⇒
qe + q p = 0
Beispiel: Die Gesamtladung eines Elektrons und eines Protons ist
gleich null
qe = −e
q p = + e
Wir bemerken, dass das Elektron und das Proton dieselbe Ladung
haben, allerdings mit entgegengesetztem Vorzeichen, obwohl die Protonenmasse ungefähr 1840-mal grösser als die Elektronenmasse ist.
Dass die Ladungen des Protons und Elektrons einander exakt kompensieren, ist ein Rätsel der Natur.
Ladungserhaltung. Die Gesamtladung eines Systems wird immer
erhalten. Wir kennen keine Ausnahme dafür.
7.2.3 Das Coulombsche Gesetz
Die Beziehung zwischen Erdbeschleunigung und Gravitationskraft
hat die Existenz einer allgemeinen, zwischen allen Körpern wirkenden, Kraft bewiesen. Newton hat als erster behauptet, dass diese Kraft
zwischen allen Objekten im Universum wirken muss.
Nach dem allgemeinen Newtonschen Gravitationsgesetz (Siehe
Kap. 2.6) ist die Gravitationskraft immer anziehend, proportional
zu den Massen der beiden Körper und umgekehrt proportional zum
Quadrat des Abstandes zwischen ihnen. Sie liegt in der Verbindungslinie zwischen ihnen.
Die Gravitationskraft ist
r
r
mm r
F12G = −G 1 2 2 12
r12 r12
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
wobei m1 und m2 zwei Punktmassen sind, und r 12 ⁄ r 12 der Einheitsvektor, der von m1 nach m2 zeigt, und G ist die universelle Gravitationskonstante
G = 6,67 × 10–11 Nm2/kg2.
In ähnlicher Weise werden geladene Teilchen miteinander durch die
elektrische Kraft wechselwirken.
Experiment. Coulombsches Gesetz mit Drehwaage
Die Experimente von Coulomb und anderer Forscher, die die Kraft
zwischen ruhenden elektrischen Ladungen studierten, führten zum
sogenannten Coulombschen Gesetz:
r
1 q1q2 r12
4πε 0 r12 2 r12
Die Kraft, die die Ladung q1 auf die Ladung q2 ausübt (Siehe
Abb. 11), ist
r
F12 =
331
wobei r 12 ⁄ r 12 der Einheitsvektor von q1 in Richtung q2 ist, ε0 wird
die Dielektrizitätskonstante des Vakuums oder elektrische Feldkonstante genannt.
Physik
332
r1
q1
Teilchen, Atome und Moleküle
y
ex
r12
x
Die Definition des Vektors r12.
ey
Figur 11.
Es folgt, dass
q2
F12 wenn q1q2 < 0
r2
zwei Punktladen q1 und q2, die sich im Abstand r voneinander
befinden, eine Kraft aufeinander ausüben. Die Kraft wirkt
entlang der Verbindungslinie zwischen q1 und q2, und ist
umgekehrt proportional zum Quadrat des Abstandes der
Ladungen und proportional zu deren Produkt.
Wir bemerken, dass im Fall der Gravitationskraft die Massen immer
positiv sind, und deshalb die Gravitationskraft immer anziehend ist.
Im Gegensatz dazu können Ladungen einen positiven oder negativen
Wert haben und deshalb die elektrische Kraft abstossend oder anziehend wirken.
Es folgt:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
abstossend
anziehend
Gleichnamige Ladungen stossen sich ab, ungleichnamige ziehen sich an.
q1q2 > 0 ⇒
q1q2 < 0 ⇒
1
ε 0µ 0
⇒
1
= µ 0c 2
ε0
Im Kap. 6.6 haben wir schon erwähnt, dass nach der Maxwellschen
Theorie des Elektromagnetismus (Siehe Kap. 11) die Ausbreitungsgeschwindigkeit von elektromagnetischen Wellen gleich
c=
ist. Wir werden später sehen, dass im MKSA-System die Permeabilitätskonstante im Vakuum µ0 gleich
µ 0 = 4π × 10 −7 m kg C −2
ist, und es folgt daraus
−7
−2
2
1
µ c 2 ( 4π × 10 m kg C )c
≡ 0 =
≈ 9 × 10 9 Nm 2 / C 2
4πε 0
4π
4π
1
10 7
=
≈ 8, 854 × 10 −12 C 2 N −1m −2
µ 0c 2 4πc 2
Die elektrische Feldkonstante ε0 hat den Wert
ε0 =
Aus dieser Beziehung kann man auch eine Defintion des Coulombs
ableiten:
333
das Coulomb ist die Ladung, welche eine gleiche Ladung in
der Entfernung von 1 m im Vakuum mit einer Kraft von 10–7c2
Physik
334
Teilchen, Atome und Moleküle
Newton (wobei c die Lichtgeschwindigkeit in m/s ist) oder
9×109 Newton abstösst.
Beispiel: Die elektrische Kraft zwischen Elektronen und Protonen.
Siehe Abb. 12.
Der Abstand r des Elektrons zum Proton in einem Atom ist ungefähr
r≈10–10 m.
p
+e F
Proton–Elektron
Kraft
Elektron–Elektron
Kraft
Proton–Proton
Kraft
1 qq
1 e2
(1, 602 × 10 −19 ) 2
1
2
=
≈ 9 × 10 9
F=
≈ 2 × 10 −8 N
2
4πε r12 2 4πε 0 r 2
(10−10 )
0
F
p
+e
–e F
r
F
–e
e
e
–e
F
e
+e F
p
Figur 12. Die elektrische Wechselwirkung zwischen den geladenen
Elementarteilchen, Elektron und Proton.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
Gravitation versus elektrische Kraft. Im Vergleich zur Gravitationskraft ist die elektrische Kraft sehr stark.
Das Verhältnis der elektrischen Kraft zur Gravitationskraft für das
Elektron und Proton ist (unabhängig vom Abstand, weil beide Kräfte
proportional zu r–2 sind)
1 e2
Fe
1
e2
4πε 0 r 2
=
=
me m p 4πε 0G me m p
FG
G 2
r
(1, 602 × 10 −19 ) 2
9 × 10 9
≈ 2 × 10 39
6, 67 × 10 −11 (9,10 × 10 −31 )(1, 67 × 10 −27 )
≈
Die Gravitationskraft ist im Vergleich zur elektrischen Kraft verschwindend gering.
Nur wenn ein Körper elektrisch neutral ist (wie z.B. die Erde, die dieselbe Anzahl von Protonen und Elektronen enthält), ist seine Gravitationskraft wichtig.
Sobald es kein Gleichgewicht zwischen positiven und negativen
Ladungen gibt, wird die elektrische Kraft immer viel grösser als die
Gravitationskraft sein.
7.2.4 Das Atom und die Elemente
Atome sind Gruppierungen von Elektronen, Protonen und Neutronen.
335
Zur Zeit kennen wir etwas mehr als 100 Elemente, von denen 92 in
der Natur vorkommen. Jedes Element ist dadurch charakterisiert,
dass seine Atome
• Z Protonen und ebenso viele Elektronen besitzen
Physik
336
Teilchen, Atome und Moleküle
• und N Neutronen haben
Die Protonenzahl Z heisst Ordnungzahl. Die Gesamtzahl der Protonen und Neutronen in einem Atom nennt man Massenzahl, die als A
bezeichnet wird. Es gilt
A=Z+N
Alle Atome mit der gleichen Ordnungszahl, d.h. gleiche Zahl von
Protonen, gehören zur gleichen atomaren Spezies, d.h. zum gleichen
chemischen Element. Z.B. sind alle Atome mit Z=1 Wasserstoffatome (H).
Im 19. Jahrhundert erkannten die Chemiker, dass die Elemente
gewisse Regelmässigkeiten in ihren physikalischen und chemischen
Eigenschaften haben. Im Jahr 1870 hat Mendelejev2 die Elemente im
Periodensystem der Elemente klassifiziert. In diesem System wurden die Atome als Funktion ihrer Ordnungszahl und durch ihre chemischen Eigenschaften organisiert.
Die elektromagnetische Wechselwirkung zwischen den entgegengesetzt geladenen Elektronen und Protonen hält ein Atom
zusammen.
Die Gesamtladung der Protonen ist gleich +Ze. Jedes Elektron hat
die negative Ladung –e, so dass sich Protonen und Elektronen gegenseitig anziehen, während die Elektronen und Protonen einander
abstossen.
Atome
∑
Elektronen
qi +
Protonen
∑
qi = − Ze + Ze = 0
Die Gesamtladung der Atome ist daher (Addition der Ladung)
gleich
QAtom =
d.h., die Atome sind elektrisch neutral.
7.2.5 Das klassische Atom-Modell
Wir beginnen mit dem einfachsten System: das Wasserstoff-Atom
mit Z=1, A=1.
Weil die Form der elektrischen Kraft ähnlich derjenigen der Gravitationskraft ist, wird man mit Hilfe der klassischen Mechanik voraussagen, dass das Elektron sich um das Proton bewegt wie ein Planet um
die Sonne.
Siehe Abb. 13.
me
r
dv e r
= Fe
dt
und
mp
r
r
dv p
= − Fe
dt
Im Rahmen der klassischen Mechanik ist die Bewegungsgleichung
für das Proton und das Elektron (relativ zu einem Inertialbeobachter
O) gleich
wobei
1 e2
4πε 0 r 2
Die Entfernung zwischen dem Elektron und dem Proton wird als r
bezeichnet.
r
Fe =
2. D. Mendelejev (1834-1907)
Physik
337
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
338
Teilchen, Atome und Moleküle
Erde
Sonne
System Erde-Sonne
Elektron
Proton
System Wasserstoff-Atom
Figur 13. Klassisches Modell des Wasserstoff-Atoms. Das Elektron bewegt
sich um das Proton wie ein Planet um die Sonne.
Das System ist ähnlich demjenigen, bei dem zwei Massen durch eine
Feder verbunden sind. Die elektrische Kraft wirkt als eine innere
Kraft des Systems und wir nehmen an, dass keine äusseren Kräfte
wirken.
⇒ µ ≈ me
Wir haben gesehen (Siehe Kap. 7.1.3), dass die relative Beschleunigung zwischen Elektron und Proton durch die folgende Gleichung
beschrieben wird
r
r
r
dv
µa12 = µ 12 = F12
dt
Die reduzierte Masse µ ist
1 1
1
1
1
1
=
+
≈
1 +
≈
µ me m p me 1840 me
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
wobei die Masse des Protons als 1840-mal grösser als die Masse des
Elektrons angenommen wurde.
(
)
Der Schwerpunkt des Elektron-Proton-Systems ist
r
r
r
r
me re + 1840 rp
r
r m r +m r
r
1
rSP ≡
∑ m r = me e + mp p ≈ m (1 + 1840) ≈ rp
M i =1,N i i
e
p
e
d.h., weil das Proton viel schwerer als das Elektron ist, liegt das Proton im Schwerpunkt des Systems.
Wir nehmen deshalb an, dass sich das Proton in Ruhe befindet und
dass das Elektron sich um das Proton bewegt.
Die (innere) Energie des Atoms ist
r2
1
U = E kin + E pot, interne = ∑ miv i + E pot, interne
2 i =1,N
1 r
≈ me v e2 + E pot, elektrische Kraft
2
Wir suchen nun die potentielle Energie der elektrischen Kraft.
r
r
FG = −∇E G pot
339
Wir haben die Gleichung für die potentielle Energie der Gravitationskraft in Kap. 3.8.4 hergeleitet
r
r
r
GMm
GMm r
⇒ E G pot ( r ) = −
FG = − 2
r
r r
wobei gilt
Physik
340
Teilchen, Atome und Moleküle
Mit einer ähnlichen Herleitung kann man beweisen, dass die potentielle Energie der (anziehenden) elektrischen Kraft zwischen dem
Elektron und Proton gleich (das Proton liegt im Ursprung des Koordinatensystems)
r
r
r
1 e2 r
1 e2
⇒ E e pot ( r ) = −
Fe = −
4πε 0 r 2 r
4πε 0 r
ist. Es folgt
1 r
1 e2
U = me v e2 −
2
4πε 0 r
Wir nehmen zusätzlich an, dass das Elektron sich auf einer Kreisbahn
bewegt.
Siehe Abb. 14.
Die Kraft, die auf das Elektron wirkt, ist dann (Siehe Kap. 1.3)
r2
2
r
r
m
v
e
1
1 e2
⇒ me v e2 =
Fe = e e =
r
4πε 0 r 2
4πε 0 r
und die innere Energie ist
1 1 e2
1 e2
1 1 e2
=−
U ( r) =
−
2 4πε 0 r 4πε 0 r
2 4πε 0 r
Diese Gleichung entspricht der inneren Energie des Systems, wenn
das Elektron sich auf einem Kreis mit Radius r um das Proton bewegt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
p
a
r
v
Fe
e
Figur 14. Angenommene Kreisbahn des Elektrons um das Proton. Die
Kraft, die Beschleunigung und die Geschwindigkeit sind gezeigt.
Da die Energie einen negativen Wert besitzt, ist das Elektron-ProtonSystem “gebunden”. Das Elektron wird ständig um das Proton kreisen.
⇒
U ( r) + E frei > 0
Um das Elektron vom Proton zu trennen, muss es eine Energie Efrei
grösser U bekommen, so dass
E frei > U ( r)
7.2.6 Der Kern der Atome
Wasserstoff ist das leichteste (und einfachste) Atom, das nur ein Proton besitzt. Helium (He) ist das zweite und hat zwei Protonen.
Lithium (Li) besitzt drei Protonen und so weiter. Atome mit Z=6 sind
Kohlenstoffatome, und alle Uran-Atome haben Z=92.
341
Im Fall, dass es Z Protonen und Z Elektronen im Atom gibt, ist die
Gesamtbewegung der Elektronen und Protonen schwierig zu lösen.
Wir brauchen ein Modell.
Physik
342
Teilchen, Atome und Moleküle
Im Atommodell von Thompson werden die Atome als Kugeln mit
einer gleichmässig verteilten positiven und negativen Ladung
betrachtet.
Im Jahr 1910 führten H. Geiger, E. Marsden und E. Rutherford3 eine
Reihe von Streuexperimenten mit α-Teilchen durch.
Ein α-Teilchen ist ein schweres Elementarteilchen (ungefähr 7400mal die Masse des Elektrons). Es enthält zwei Protonen und zwei
Neutronen.
Mit diesen Experimenten bewies Rutherford, dass ein Atom
aus einem positiv geladenen Kern mit einer äusseren Elektronenhülle besteht.
Ein paralleler Strahl von α-Teilchen wurde senkrecht auf eine 0,4µm
dünne Goldfolie gerichtet.
Ein Stoss (Siehe Kap. 7.1.9) zwischen den α-Teilchen und den GoldAtomen wird stattfinden.
Während des Stosses wird Impuls zwischen den α-Teilchen und den
Atomen übertragen
3. H. Geiger (1882-1945), E. Marsden (1889-1970), E. Rutherford (1871-1937)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
.
Figur 15.
p n
n p
α-Teilchen
Ruckwärtsstreuung
Goldfolie
Vorwärtsstreuung
Streuexperiment von Geiger, Marsden und Rutherford.
Experimentell beobachtet man, dass die meisten α-Teilchen in Vorwärtsrichtung gestreut wurden. Eine geringe Anzahl wurde nach
rückwärts gestreut. Siehe Abb. 15.
Rutherford schloss aus seinen Experimenten, dass eine Rückwärtsstreuung von α-Teilchen nicht von den Elektronen verursacht werden
kann, da die Masse der Elektronen viel zu gering ist, um die schweren
α-Teilchen so stark ablenken zu können.
343
Nach der Impulserhaltung muss die Masse des Stosspartners
viel grösser als die des α-Teilchens sein. Rutherford stellte
daraufhin sein Atommodell vor, bei dem ein positiv geladener
massereicher Kern von einer fast masselosen Hülle von negativ geladenen Elektronen umgeben ist.
Physik
344
Teilchen, Atome und Moleküle
Wir wissen heute, dass der Kern eines Atomes einen Durchmesser
von einigen Femtometer (fm) hat
dKern ≈ 1 fm = 10 −15 m
Protonen und Neutronen eines Atoms sind in seinem Kern konzentriert. Die elektrische Abstossung zwischen zwei Protonen im Kern
ist viel grösser als ihre Anziehung aufgrund der Gravitationskraft.
Eine andere Wechselwirkung (die sogenannte starke Wechselwirkung) hält Protonen im Kern zusammen, trotz der elektrischen
Abstossung.
Die starke Wechselwirkung wirkt zwischen Protonen und Neutronen
und hat eine kleine Reichweite (in der Grössenordnung des Kerndurchmessers). Wenn Protonen oder Neutronen sich in einem
Abstand kleiner als einige Kerndurchmesser voneinander befinden,
werden sie dank der starken Kraft zusammenkleben.
Der Abstand der Elektronen vom Kern liegt bei
rElektron ≈ 1 Å = 10 −10 m = 100000 fm
(1Å=1 Ångström4) Eine solche Anordnung der Elektronen für
Helium, Neon, Argon und Krypton wird in Abb. 16 gezeigt.
Wir werden später sehen, dass die Elektronen um den Kern nicht mit
Hilfe einer Bahn beschrieben werden können. Eine Berechnung der
“räumlichen Verteilung der Elektronen” muss mit Hilfe der sogenannten Quantenmechanik (Siehe Kap. 13) durchgeführt werden.
4. A.J. Ångström.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
Figur 16. Anordnung der Elektronen um den Kern in einigen einfachen
Atomen (Helium, Neon, Argon und Krypton). Da die Elektronen nicht
wohldefinierten Bahnen folgen, zeigen die dunklen Bereiche diejenigen
Zonen an, die mit grösserer Wahrscheinlichkeit mit Elektronen besetzt
sind.
Da die Bahnen der Elektronen nicht wohldefiniert werden können,
zeigen die dunklen Bereiche in Abb. 16 diejenigen Zonen an, die mit
grösserer Wahrscheinlichkeit mit Elektronen besetzt sind.
Die Elektronen sind in Schalen um den Kern angeordnet, die umso
mehr Elektronen aufnehmen können, je weiter aussen sie sich befinden. Die erste Schale enthält maximal 2 Elektronen, die zweite 8, die
dritte 18 und die vierte 32. Die nächsten Schalen könnten noch mehr
Elektronen aufnehmen, werden aber bei den bisher bekannten Elementen nicht voll besetzt.
Die chemischen und physikalischen Eigenschaften der Elemente hängen von der Anzahl und Verteilung der Elektronen ab.
345
Mit der Schalenstruktur der Elektronen lässt sich die Periodizität
der chemischen Eigenschaften der Elemente im Periodensystem
erklären.
Physik
346
Teilchen, Atome und Moleküle
1.
2.
3.
Elemente mit nur einem Elektron in der äussersten Schale (wie
z.B. Wasserstoff, Lithium oder Kalium) sind sehr reaktiv und kommen nur in Verbindungen vor.
Die Elemente, denen nur ein Elektron zu einer vollständigen
Schale fehlt, sind auch sehr reaktiv.
Die Elemente mit vollständig gefüllten Elektronenschalen (wie die
Edelgase Helium, Neon, Argon, usw.) sind chemisch inert, d.h., sie
reagieren praktisch nicht.
Die richtige Berechnung der Elektronenkonfigurationen und die
damit mögliche Deutung der chemischen Eigenschaften gehörten zu
den grossen Erfolgen der Quantenmechanik.
7.2.7 Die Isotope
Atome mit der gleichen Ordnungszahl Z können verschiedene Massenzahl A besitzen.
Atome mit gleichem Z aber verschiedenem A nennt man Isotope.
Praktisch verhalten sich Isotope eines bestimmten Elements chemisch gleich.
Die häufigsten Isotope sind in Abb. 17 aufgelistet.
Zur Zeit kennt man etwa 104 verschiedene chemische Elemente, aber
es gibt mehr als 1300 verschiedene Isotope.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Atome
Element
H
He
Li
Be
B
C
N
O
F
Ne
Na
Mg
Al
Si
P
S
Cl
A
K
Ca
Sc
Ti
V
Cr
Mn
Fe
Co
Ni
Cu
Zn
Ga
Ge
As
Se
Br
Kr
Rb
Sr
Y
Zr
Nb
Mo
Tc
Ru
Rh
Pd
Ag
Cd
In
Sn
Sb
Te
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
0
2
4
5
6
6
7
8
10
10
12
12
14
14
16
16
18
22
20
20
24
26
28
28
30
30
32
30
34
34
38
42
42
46
44
48
48
50
50
50
52
56
54 (>100 yr)
58
58
60
60
66
66
70
70
78
Chemical No. of
No. of
symbol
protons neutrons
Hydrogen
Helium
Lithium
Beryllium
Boron
Carbon
Nitrogen
Oxygen
Fluorine
Neon
Sodium
Magnesium
Aluminum
Silicon
Phosphorus
Sulfur
Chlorine
Argon
Potassium
Calcium
Scandium
Titanium
Vanadium
Chromium
Manganese
Iron
Cobalt
Nickel
Copper
Zinc
Gallium
Germanium
Arsenic
Selenium
Bromide
Krypton
Rubidium
Strontium
Yttrium
Zirconium
Niobium
Molybdenum
Technetium
Ruthenium
Rhodium
Palladium
Silver
Cadmium
Indium
Tin
Antimony
Tellurium
Element
I
Xe
Cs
Ba
La
Ce
Pr
Nd
Pm
Sm
Eu
Gd
Tb
Dy
Ho
Er
Tm
Yb
Lu
Hf
Ta
W
Re
Os
Ir
Pt
Au
Hg
Tl
Pb
Bi
Po
At
Rn
Fr
Ra
Ac
Th
Pa
U
Np
Pu
Am
Cm
Bk
Cf
Es
Fm
Md
No
Lw
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
74
78
78
82
82
82
82
82
86
90
90
94
94
98
98
98
100
104
104
108
108
110
112
116
116
117
122
122
124
126
126
124 (3yr)
125 (8hr)
136 (3days)
136 (21min)
138 (1622yr)
138 (22hr)
140 (80,000
yr)
140 (34,000
yr)
146 (4.5billion
yr)
144(2.2
million
yr)
145 (24,000
yr)
144 (490yr)
146 (150 day)
150 (1000yr)
153 (800yr)
155 (480days)
153 (23hr)
155 (1.5hr)
152 (3sec)
Chemical No. of
No. of
symbol
protons neutrons
Iodine
Xenon
Cesium
Barium
Lanthanum
Cerium
Praseodymium
Neodymium
Promethium
Samarium
Europium
Gadolinium
Terbium
Dysprosium
Holmium
Erbium
Thulium
Ytterbium
Lutetium
Hafnium
Tantalum
Tungsten
Rhenium
Osmium
Iridium
Platinum
Gold
Mercury
Thallium
Lead
Bismuth
Polonium
Astatine
Radon
Francium
Radium
Actinium
Thorium
Protactinium
Uranium
Neptunium
Plutonium
Americium
Curium
Berkelium
Californium
Einsteinium
Fermium
Mendelevium
Nobelium
Lawrencium
347
Figur 17. Die in der Natur am häufigsten vorkommenden Isotope. Im Fall,
dass es keine stabilen Isotope gibt, ist die Lebensdauer in Klammern
angegeben.
Physik
348
Teilchen, Atome und Moleküle
H,
2
H
3
Beispiel: Die drei Isotope des Wasserstoffs werden geschrieben als
H,
1
Moleküle
7.3 Moleküle
Man kennt mehrere tausend verschiedene Arten von Molekülen.
Einige enthalten nur wenige Atome (wie z.B. das Wassermolekül, das
in Abb. 21 illustriert wird)
Man findet sehr selten isolierte Atome. Atome bilden eher gebundene
Systeme, sogenannte Moleküle.
Alle haben ein Z=1 und jeweils A=1 (kein Neutron), A=2 (ein Neutron) und A=3 (zwei Neutronen). Der Wert der Massenzahl A wird
links oben neben die Bezeichnung des chemischen Elements
geschrieben. Historisch werden die drei Isotope des Wasserstoffs als
Wasserstoff, Deuterium und Tritium bezeichnet.
1.
2.
Physik
349
Wenn Atome sich einander annähern, bleiben die Elektronen, die sich
in den inneren Schalen der Atome befinden (die inneren Elektronen), an die zugehörigen Atome gebunden.
Ingesamt gesehen sind Atome elektrisch neutral, weil es genauso
viele negative Ladungen in den Elektronen der Hülle wie positive
Ladungen in den Protonen der Kerne gibt. Trotzdem können elektrische Wechselwirkungen zwischen Atomen auftreten.
Die Kräfte zwischen einzelnen Atomen in einem Molekül sind elektrischer und magnetischer Natur, denn in allen Atomen sind bewegte
elektrische Ladungen vorhanden.
Wenn sich ein Molekül bildet, verlieren die Atome bis zu einem
gewissen Grad ihre Identität: ein Molekül besteht aus mehreren Atomkernen und einer Gruppe von Elektronen. Die Elektronen bewegen
sich um die Kerne in solcher Weise, dass eine stabile Anordnung entsteht.
die biologischen Moleküle (Proteine, Enzyme und Nukleinsäuren
DNA und RNA)
einige Polymere (Polyäthylen oder Polyvinylchlorid PVC)
Andere Moleküle können bis zu mehreren hundert Atomen enthalten,
wie z.B.
Helium-4
p n
n p
p
n p
Helium-3
Die Kerne von Wasserstoff- und Helium-Isotopen sind in Abb. 18
dargestellt.
p
Wasserstoff-1
p
n
Wasserstoff-2
(Deuterium)
p
n n
Wasserstoff-3
(Tritium)
Figur 18. Kerne von Wasserstoff- und Heliumisotopen. Die Protonen und
Neutronen werden als kleine Kugeln dargestellt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
350
b)
a)
maximale
anziehende Kraft
halbe maximale
Kraft
weniger als1%
der maximalen Kraft
Teilchen, Atome und Moleküle
c)
Gleichgewicht
(keine Kraft)
r
d)
starke
Abstossung
abstossender
Kern
Keine Kraft
maximale
anziehende Kraft
r
Abstand zwischen den Atomen
e)
potentielle
Energie der
zwei
Atome
r=0
Emin
Figur 19. Illustration der Kraft zwischen zwei Atomen (Potentielle Energie
von Leonard Jones).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Moleküle
Die äusseren Elektronen bewegen sich im Raum zwischen den Kernen mehr oder weniger frei über das gesamte Molekül. Eine anziehende Kraft zwischen den Kernen folgt daraus, die eine kurze
Reichweite besitzt.
Wenn die Atome sich so nahe kommen, dass sich ihre Elektronenhüllen stark überlappen, dann treten abstossende Kräfte auf.
Die zweiatomigen Moleküle. Wir betrachten zweiatomige Moleküle, wie z.B. Wasserstoff- (H2), Sauerstoff- (O2), oder StickstoffMoleküle (N2)
Die molekulare Kraft zwischen beiden Atomen in den Molekülen
kann mit Hilfe der potentiellen Energie von Leonard Jones beschrieben werden.
Die molekulare potentielle Energie Epot(r) verhält sich wie eine
asymmetrische Kurve der Form der Abb. 19, wobei r der Abstand
zwischen den beiden Atomen darstellt.
Die Gleichgewichtslage befindet sich dort, wo die potentielle Energie den minimalen Wert Emin besitzt. Wenn sich das Molekül in der
Gleichgewichtslage befindet, muss man ihm mindestens die Energie
|Emin| zuführen, um die beiden Atome zu trennen. Aus diesem Grund
wird Emin die Bindungsenergie des Moleküls gennant.
Wir entwickeln die potentielle Energie Epot(r) in eine Taylor-Reihe
um die Gleichgewichtslage r0
2
351
dE pot
1 d E pot
2
E pot ( r) = E pot ( r0 ) +
( r ) ( r − r0 ) +
( r0 ) ( r − r0 ) + ...
2 dr 2
dr 0
Physik
352
Teilchen, Atome und Moleküle
dE pot
(r ) = 0
dr 0
Nun ist die Ableitung der potentiellen Energie in der Gleichgewichtslage gleich null
Es folgt
2
1d E
2
pot
E pot ( r) = E min +
( r0 ) ( r − r0 ) + ...
2 dr 2
1
2
= E min + k ( r − r0 ) + ...
2
In der Nähe der Gleichgewichtslage wird die potentielle Energie
näherungsweise durch eine Parabel beschrieben, wie man es bei harmonischen Schwingungen findet.
Siehe Abb. 20.
Gleichgewichtslage
Potentielle Energie wird
durch eine Parabel angen hert
Potentielle Energie
von Leonard Jones
Figur 20. In der Nähe der Gleichgewichtslage ist die potentielle Energie
parabelförmig.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Moleküle
dE pot ( r)
d 1
2
≈ − k ( r − r0 ) = − k ( r − r0 )
dr
dr 2
Für eine kleine Auslenkung aus der Gleichgewichtslage, wirken die
molekularen Kräfte als eine Rückstellkraft:
F=−
Die Kräfte zwischen den Atomen in den Molekülen sind relativ stark,
so dass die Atome um ihre Gleichgewichtslage schwingen.
Geometrische Muster. Die Atomkerne in Molekülen sind in wohldefinierten geometrischen, regelmässigen Mustern angeordnet. Diese
Muster sind für jedes Molekül charakteristisch.
0.958 X 10
–8
cm
353
Im Fall der Wassermoleküle z.B. wissen wir, dass die drei Kerne an
den Eckpunkten eines Dreiecks liegen. Der Abstand zwischen dem
Sauerstoffkern und den Wasserstoffkernen beträgt ungefähr 10–10 m
= 1 Angström, und der Winkel zwischen den Wasserstoffkernen ist
ungefähr 104.5°.
Sauerstoff
Atom
104.5°
Das Wassermolekül H2O.
Wasserstoff
Atom
Siehe Abb. 21.
Figur 21.
Physik
354
Teilchen, Atome und Moleküle
Im Kohlendioxid-Molekül CO2 sind die drei Kerne auf einer Geraden
angeordnet, mit dem Kohlenstoffkern in der Mitte.
Das Ammoniakmolekül NH3 ist eine Pyramide mit dem Stickstoffkern an der Spitze.
CH4 (Methan)
CO2 (Kohlendioxid)
CH3OH (Methanol)
H2O (Wasser)
Das Methanmolekül CH4 ist ein Tetraeder mit dem Kohlenstoffkern
im Zentrum und den Wasserstoffatomen an den Eckpunkten.
Siehe Abb. 22.
HCl (Salzsäure)
NH3 (Ammoniak)
Figur 22. Einige einfache Moleküle. Die Kerne in einem Molekül sind in
wohldefinierten geometrischen Mustern angeordnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Moleküle
Moderne experimentelle Techniken (wie Röntgen- und Elektronenstrahlen) haben wertvolle Informationen über die Struktur von Molekülen geliefert.
Seit 1950 hat man auch viele biologische Moleküle studiert. Heutzutage findet sich der Bereich der Biophysik und der Molekularbiologie
in starker Expansion.
Um die Komplexität der biologischen Moleküle zu illustrieren, wird
das Myoglobin-Molekül, das sich im Muskel befindet, erwähnt.
Kendrew und Peritz (Nobel-Preis in Chemie, 1963): Sie haben das
Myoglobin-Molekül mit Hilfe von Röntgenstrahlen studiert.
Das Molekül enthält mehr als 2500 Atome. Die häufigsten sind Kohlenstoff (C, Z=6), Wasserstoff (H, Z=1), Sauerstoff (O, Z=8), Stickstoff (N, Z=7) und ein Eisenatom (Fe, Z=26).
Siehe Abb. 23.
Heutzutage hat sich das Gebiet sehr entwickelt, und man benutzt den
Computer, um eine detaillierte graphische Darstellung der Moleküle
zu gewinnen.
355
Abb. 24 zeigt z.B. ein Computer-Modell des Cholera-Toxin-B-Moleküls.
Physik
356
Ein Modell von Cholera-Toxin mit Hilfe des Computers berechnet.
Das Myoglobin-Molekül.
Teilchen, Atome und Moleküle
Figur 23.
Figur 24.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Avogadro-Zahl
7.4 Die Avogadro-Zahl
Materie besteht aus einer sehr grossen Zahl von Atomen oder Molekülen.
0, 012 kg
6 m p + 6 mn + 6 me
Das Kohlenstoff-Isotop 12C enthält genau 6 Protonen und 6 Neutronen in seinem Kern. Die Avogadro-Zahl wird definiert als die
Anzahl der 12C Atome in genau 0,012 kg Kohlenstoff, d.h.5
N A = 6, 02213665 × 10 23 ≈
N
NA
Gewöhnlich werden wir für die Stoffmenge das Symbol n (oder die
Anzahl der Mole) benutzen, das so definiert ist
n≡
wobei N die Gesamtzahl der Moleküle und NA die Avogadro-Zahl ist.
Wir sagen, dass die Avogadro-Zahl gleich
N A = 6, 022 × 10 23 pro Mol
ist, d.h. 1 Mol einer beliebigen Substanz enthält so viele Moleküle.
357
Die Masse eines Mols einer Substanz wird die molare Masse m
genannt, und es gilt
M = nm
5. Die Masse des 12C Isotops ist gleich 1,99264824×10–26 kg. Die Masse ist gleich
6mp+6mn+6me, wenn wir die Bindungsenergie vernachlässigen.
Physik
358
Teilchen, Atome und Moleküle
Nach der Definition ist sie für 12C gleich 12 g/mol.
Beispiel: Die molare Masse von atomarem Wasserstoff beträgt 1,008
g/mol. Was ist die Masse eines Wasserstoffatoms?
Die Masse eines Atoms ist gleich
1, 008 g / mol
m=
≈ 1, 67 × 10 −24 g ≈ m p
6, 022 × 10 23 / mol
wobei mp die Masse des Protons ist.
7.5 Die Phasen der Materie
Grob gesprochen erscheint Materie in drei physikalischen Zuständen
oder Phasen: Gase, Flüssigkeiten und Festkörper.
Um die verschiedenen Anordnungen der Moleküle in den verschieden Phasen zu illustrieren, werden die drei Phasen des Wassers in
Abb. 25 gezeigt.
In einem Festkörper sind die Moleküle dicht gepackt. Die Kräfte,
die die Moleküle in festen Positionen halten, sind von etwa der gleichen Grössenordnung wie die molekularen Kräfte. Wegen diesen
starken Kräften bleiben die Gestalt und das Volumen eines
Festkörpers praktisch konstant.
Die dicht gepackten Moleküle werden sich nicht als isolierte Moleküle verhalten. Die Regelmässigkeit der Anordnung der Moleküle ist
eine wichtige Eigenschaft von Festkörpern. Diese Periodizität konstituiert das, was man als Kristallgitter bezeichnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Phasen der Materie
Sauerstoff
Wasserstoff
Eis
Wasser
Dampf
Figur 25. Illustration (von Feynman) der Wassermoleküle in den drei
Phasen des Wassers.
Physik
359
360
Teilchen, Atome und Moleküle
Moleküle in Flüssigkeiten sind durch Abstände in der Grössenordnung der Moleküldimensionen voneinander getrennt und sie werden
durch relativ starke Kräfte zusammengehalten.
Daraus folgt, dass Flüssigkeiten ein festes Volumen und eine geringe
Kompressibilität haben.
Die Moleküle weisen eine grosse Beweglichkeit auf und können
unabhängig voneinander umeinander gleiten. Eine Folge ist, dass
Flüssigkeiten keine eigene Gestalt haben.
In Gasen ist die mittlere Entfernung zwischen Molekülen viel grösser
als die Ausdehnung der Moleküle. Als Folge daraus sind die zwischenmolekularen Kräfte viel schwächer als die Kräfte, welche die
Atome in Molekülen zusammenhalten. In Gasen behalten die Moleküle daher ihre Individualität.
Die Moleküle in einem Gas bewegen sich ständig durch den gesamten
Raum, den das Gas einnimmt. Das erklärt, warum Gase so leicht diffundieren.
In Abb. 25 wird z.B. der Fall des Dampfes gezeigt. Der mittlere
Abstand der Moleküle (bei Standardbedingungen, Siehe Kap. 8.4.1)
ist ungefähr 10-mal der Durchmesser der einzelnen Moleküle. Es
folgt, dass die Dichte des Dampfes ungefähr 103=1000-mal kleiner
ist, als die des Wassers.
7.6 Mikroskopische Beschreibung der
Materie
Wollten wir den Zustand eines Körpers durch den Zustand der einzelnen Atome und Moleküle beschreiben (d.h. der Körper wird als
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Mikroskopische Beschreibung der Materie
einTeilchensystem betrachtet), so müssten wir die räumlichen Koordinaten und Geschwindigkeiten aller Atome und Moleküle angeben.
r
Koordinate: ri
(i = 1,..., N )
r
Geschwindigkeiten: v i
(i = 1,..., N )
Natürlich enthält ein Mol einer Substanz schon mehr als 1023
Moleküle und deshalb ist in der Praxis die Lösung der Bewegung
einer solchen Anzahl von Körpern ganz unmöglich.
Um die Schwierigkeit der Beschreibung der Bewegung zu illustrieren, betrachten wir zwei einfache Beispiele.
Die Verdampfung des Wassers in Luft. Abb. 26 zeigt, was man auf
der Oberfläche des Wassers sehen würde. Moleküle werden die Oberfläche des Wassers kontinuierlich verlassen und andere werden ins
Wasser zurückkehren.
Das Brennen von Kohlenstoff in Sauerstoff. Das Brennen wird in
Abb. 27 illustriert.
Während des Brennens von Kohlenstoff werden Sauerstoffmoleküle
mit Kohlenstoffatomen zusammenstossen. Manchmal kann die Struktur der Sauerstoffmoleküle aufgebrochen werden, und eine neue Art
von Molekül, das Kohlenmonoxid CO oder das Kohlendioxid CO2,
wird sich bilden. Bei diesem Vorgang werden Licht und Wärme frei,
und man spricht vom Brennen des Kohlenstoffs.
361
Natürlich können im Prinzip solche Molekularvorgänge mit Hilfe
eines Computers modelliert und simuliert werden. Solche Probleme
werden im Bereich der Rechnergestützten Wissenschaften6
betrachtet.
6. An der ETH, siehe http://www.rw.ethz.ch
Physik
362
Wasserstoff
Stickstoff
Kohlenstoff
Illustration des Brennens von Kohlenstoff in Sauerstoff.
Sauerstoff
Illustration der Verdampfung des Wassers in Luft.
Sauerstoff
Teilchen, Atome und Moleküle
Figur 26.
Figur 27.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 8
Temperatur und Gase
8.1 Die Brownsche
Molekularbewegung
Im letzten Viertel des 19. Jahrhunderts wurde die Vorstellung von
einem atomaren Aufbau der Materie noch von vielen Wissenschaftlern abgelehnt.
Es war damals natürlich noch niemandem gelungen, einen einzigen
direkten Beweis für die Existenz von Molekülen oder Atomen zu
erbringen.
363
Auch war es schon relativ früh klar, dass die Grösse von Atomdurchmessern etwa 10–9 bis 10–10 m sein müsste, und niemand hatte die
Hoffnung, ein so kleines Teilchen nachweisen zu können.
Physik
364
Temperatur und Gase
Der englische Botaniker R. Brown1 hatte schon im Jahre 1827 unter
einem Mikroskop beobachtet, wie im Wasser suspendierte Blütenpollen eine dauernde unregelmässige Bewegung ausführten.
Siehe Abb. 1.
Er gab keine Erklärung, warum solche Teilchen sich so verhielten.
Experiment: Brownsche Bewegung (Live mit Mikroskop)
Im Jahr 1905 entwickelte Einstein2 seine Theorie der Brownschen
Bewegung. Er schrieb3:
“Mein Hauptziel dabei war es, Tatsachen zu finden, welche
die Existenz von Atomen von bestimmter endlicher Grösse
möglichst sicherstellen. Dabei entdeckte ich, dass es nach der
atomistischen Theorie eine der Beobachtung zugängliche
Bewegung suspendierter mikroskopischer Teilchen geben
müsse, ohne zu wissen, dass Beobachtungen über die
“Brownsche Bewegung” schon lange bekannt waren.”
Die grundlegende Annahme Einsteins war, dass die Brownsche
Molekularbewegung von den Stössen der Flüssigkeitsmoleküle auf
die Teilchen erzeugt wird.
Die suspendierten Teilchen sind natürlich sehr viel grösser als die
Moleküle der Flüssigkeit und werden deshalb von allen “Seiten” von
ihnen gestossen.
7
6
5
4
8
2
15
16
11
10
12/14
13 19
25
1
27
24
21
17
18
20
22
26
28
23
29
.02
30
.03
32
35
36
37
31/33 34
Illustration der Brownschen Bewegung.
.01
t = 1/6 Sekunde
3
9
Die Brownsche Molekularbewegung
0
Figur 1.
38
mm
Wäre das suspendierte Teilchen klein und die Anzahl der stossenden
Moleküle gering, würden die Stösse unregelmässig geschehen. Das
suspendierte Teilchen verhält sich wie ein sehr grosses Molekül, und
Wäre das suspendierte Teilchen sehr gross, und wäre die Anzahl der
anderen Moleküle hoch, so würden im Mittel von allen Seiten zu
jeder Zeit gleich viele Stösse geschehen, so dass das suspendierte
Teilchen in Ruhe bleibt.
1. R. Brown (1773-1858)
2. A. Einstein (1879-1955)
3. in seinen autobiographischen Bemerkungen
Physik
365
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
366
Temperatur und Gase
seine Bewegung sollte qualitativ der der Flüssigkeitsmoleküle entsprechen.
Wäre die Anzahl der Flüssigkeitsmoleküle pro Einheitsvolumen sehr
gross, so gäbe es keine Fluktuation, und es würde keine Brownsche
Bewegung stattfinden.
Wäre diese Anzahl andererseits sehr klein, so wäre die Brownsche
Bewegung sehr “heftig”.
Es folgt daraus, dass die Anzahl der Flüssigkeitsmoleküle pro Einheitsvolumen aus der Brownschen Bewegung berechnet werden kann,
und diese Anzahl wurde zum Beweis der atomaren Theorie erfolgreich benutzt.
Gibt es eine physikalische Grösse, die der Bewegung der Moleküle
entspricht?
Als wir die Materie in Kap. 7.6 mikroskopisch beschrieben haben,
konnten wir die Moleküle nicht als “tanzende” Teilchen darstellen. In
Wirklichkeit werden alle Teilchen eine solche Bewegung machen.
Man beobachtet, dass in allen Phasen der Materie (Gase, Flüssigkeiten sowie Festkörper) die Atome oder die Moleküle eine Art von dauernder unregelmässiger Bewegung aufweisen:
1.
2.
in Gasen werden sich die Gasmoleküle durch das gesamte Volumen bewegen, das das Gas einnimmt.
in Festkörpern oder Flüssigkeiten werden die Atome oder
Moleküle um ihre Gleichgewichtslage schwingen.
Diese Bewegung nimmt mit der Temperatur zu und wird deshalb als
thermische Bewegung bezeichnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Ausdehnung
Die thermische Bewegung ist für die Änderung des Zustandes oder
der Phase der Materie mit der Temperatur verantwortlich.
8.2 Thermische Ausdehnung
Bei einer Temperaturänderung beobachtet man gewöhnlich eine
Änderung der Grösse der Materialien. Im Allgemeinen werden Körper sich bei einer Erhöhung der Temperatur ausdehnen.
Experiment: Dilatations-Apparat
Ein Stab wird geheizt und dehnt sich aus. Wenn er sehr heiss
ist, werden seine beiden Enden fest fixiert. Dann wird der Stab
wieder gekühlt und er wird zu seiner ursprünglichen Länge
zurückkehren. Weil der Stab fixert ist, wird er wegen der
hohen Kräfte brechen.
Wir betrachten einen einfachen Festkörper. Eine mikroskopische
Beschreibung der Bewegung der Atome kann die thermische Ausdehnung erklären.
Die Kräfte zwischen den Atomen in einem Festkörper können mit
Hilfe einer potentiellen Energie von der Form von Leonard Jones
(Siehe Kap. 7.3) ausgedrückt werden.
Die Atome schwingen um ihre Gleichgewichtslage. Die Schwingungsamplitude ist ungefähr 10–11 m, d.h. ein Zehntel eines Atomdurchmessers.
367
Bei einer gegebenen Schwingungsenergie ändert sich der Abstand der
Atome periodisch zwischen einem Minimal- und einem Maximalwert.
Physik
368
Temperatur und Gase
r2
Mittlerer Abstand
r1
E2
E1
Maximaler Abstand
Wegen der Asymmetrie der potentiellen Energie, ist der mittlere
Abstand grösser als der Gleichgewichtsabstand r0.
Siehe Abb. 2.
Minimaler Abstand
r0
Gleichgewichtslage
Figur 2. Modell der potentiellen Energie der Atome. Die Atome schwingen
um die Gleichgewichtslage. Ihr mittlerer Abstand nimmt mit der Energie
zu.
Thermische Ausdehnung bedeutet eine Zunahme der mittleren
Abstände zwischen den Atomen.
Wenn wir annehmen, dass die Schwingungsenergie der Atome des
Festkörpers sich mit der Temperatur erhöht, dann kann die thermische Ausdehnung als Folge der Asymmetrie der potentiellen Energie
der Atome erklärt werden.
Wäre die Potentialkurve bezüglich der Gleichgewichtslage symmetrisch, so wäre der mittlere Abstand unabhängig von der Schwingungsenergie. Die thermische Ausdehnung ist eine direkte Folge der
Asymmetrie der potentiellen Energie.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Ausdehnung
∆L = α (T ) L∆T
Experimentell beobachtet man, dass bei nicht zu grosser Temperaturänderung die Längenänderung ∆L proportional zur Temperaturänderung ∆T und zur ursprünglichen Länge L ist:
wobei α(Τ) der lineare Ausdehnungskoeffizient ist.
1 ∆L
L ∆T
Der Koeffizient α(Τ) hängt von der Temperatur ab. Diese Abhängigkeit wird normalerweise gegenüber der Messgenauigkeit vernachlässigt. Seine Definition ist die folgende
α (T ) ≡
Für α=10–5/°C liegt die lineare Ausdehnung bei 1 mm für eine Länge
von 1 m und eine Temperaturerhöhung von 100 °C. Die mittleren
linearen Ausdehnungskoeffizienten für verschiedene Materialien sind
in Tab. 1 angegeben.
Kupfer
Messing
Aluminium
Material
0,9×10—5
1,7×10—5
1,9×10—5
2,4×10—5
α in °C–1
Stahl
Blei
Invar
Eis
Hartgummi
Material
1,1×10—5
2,9×10—5
0.1×10—5
5,1×10—5
8×10—5
α in °C–1
100°C; für Eis von –10°C bis 0°C.
Glas
0,32×10—5
1 ∆V
V ∆T
369
TABLE 1. Mittlere lineare Ausdehnungskoeffizienten für den Bereich 0°C bis
Hartglas (Pyrex)
γ (T ) ≡
Analog wird der Volumenausdehnungskoeffizient γ definiert
Physik
370
Temperatur und Gase
wobei V das Volumen des Körpers ist.
Bei isotropen Festkörpern ist bei einer Temperaturänderung die relative Längenänderung in allen Richtungen dieselbe. Es folgt in diesem
Fall
1 ∆V
1 ∆( L1L2 L3 )
=
γ (T ) =
∆T
V ∆T L1L2 L3
∆L
∆L
1 ∆L1
=
L L + 2 LL + 3 LL
L1L2 L3 ∆T 2 3 ∆T 1 3 ∆T 1 2
1
=
(α (T )L1L2L3 + α (T )L2L1L3 + α (T )L3L1L2 )
L1L2 L3
= 3α (T )
Bemerkung: Für die meisten Materialien haben α und γ einen positiven Wert. D.h. sie dehnen sich bei der Erhöhung ihrer Temperatur
aus.
Eine wichtige Ausnahme ist das Wasser. Für eine Temperatur
T>4°C dehnt sich das Wasser wie erwartet aus. Zwischen 0°C und
4°C nimmt sein Volumen bei steigender Temperatur ab!
Diese Eigenschaft hat eine wichtige Konsequenz: bei T≈4°C erreicht
die Dichte des Wassers ein Maximum. Das Wasser ist bei T≈4°C
schwerer als bei 0°C. Das Eis schwimmt auf dem Wasser (bei Frost
bildet sich das Eis zuerst auf der Oberfläche eines Sees und bleibt
dort, weil es eine geringere Dichte als das Wasser hat.)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Temperatur und das Gasthermometer
8.3 Die Temperatur und das
Gasthermometer
Die Temperatur ist uns vertraut als eine Mass dafür, wie warm oder
wie kalt ein Körper ist.
Eine genaue Definition der Temperatur ist keineswegs trivial.
Im Fall eines Festkörpers oder einer Flüssigkeit haben wir gesehen,
dass die Temperatur mit der thermischen Bewegung der Atome korreliert ist. Im Fall eines Gases ist die Temperatur ein Mass für die mittlere kinetische Energie der Gasmoleküle.
Ein Thermometer kann definiert werden, wenn sich eine physikalische Eigenschaft eines Körpers mit der Temperatur verändert. Eine
quantitative Messung dieser Eigenschaft wird die Temperatur liefern.
Die thermische Ausdehnung eines Körpers oder einer Substanz
(wie z.B. Quecksilber);
Der elektrische Widerstand von Metallen, der mit der Temperatur
zunimmt;
Das Volumen eines Gases bei konstantem Druck;
usw.
Eine solche Eigenschaft, die zur Temperaturmessung führt, wird eine
thermometrische Eigenschaft genannt. Man kann z.B. die folgenden thermometrischen Eigenschaften benutzen
1.
2.
3.
4.
371
Jede dieser thermometrischen Eigenschaften kann im Prinzip zur
Messung der Temperatur eines Körpers benutzt werden.
Physik
372
Temperatur und Gase
8.3.1 Das Gasthermometer
Luft oder Gas
Quecksilber
Vakuum
Wir betrachten das Gasthermometer. Bei einer Version wird das Volumen des Gases als thermometrische Eigenschaft benutzt.
l
h
Druck des Gases: p
Volumen: V
Temperatur: T
Eine Version des Gasthermometers mit konstantem Druck.
Siehe Abb. 3.
Figur 3.
Das Quecksilber übt eine nach unten gerichete Kraft aus, deren
Betrag gleich
mg = ρlAg
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Temperatur und das Gasthermometer
ist, wobei ρ die Dichte des Quecksilbers und A die Querschnittsfläche
ist.
F
A
Der Druck p wird definiert als die senkrecht auf eine Fläche ausgeübte Kraft pro Fläche, d.h.
p≡
wobei F die Kraft und A die Fläche ist.
N
m2
Einheit: Die MKS-Einheit des Druckes ist Newton pro Quadratmeter
(N/m2), die als 1 Pascal bezeichnet wird
1 Pa = 1
Oft benutzt man auch die Atmosphäre (atm). Eine Atmosphäre entspricht ungefähr dem Luftdruck auf Meereshöhe
1 atm = 1, 01325 × 10 5 Pa
Eine andere Einheit ist das bar
1 bar = 1000 mbar = 100 kPa = 10 5 Pa
p=
F ρlAg
=
= ρgl
A
A
373
Der Druck p wird definiert als eine makroskopische Grösse, die den
Zustand des Gases im Thermometer als Ganzes beschreibt. Das
Quecksilber übt einen Druck p auf das Gas aus, wobei gilt
Physik
374
Temperatur und Gase
p ≡ Druck des Gases
Man spricht vom Druck des Gases:
In der Version des Gasthermometers, die wir nun betrachten, wird der
Druck p des Gases konstant gehalten.
V = CT
bei konstantem Druck
Experimentell beobachtet man (Siehe Abb. 4), dass das Volumen des
Gases bei konstantem Druck proportional zur Temperatur ist:
1
Dieses Ergebnis ist als Gesetz von Gay-Lussac (J.L. Gay-Lussac
1778-1850) bekannt. Das Gesetz gilt für alle Gase bei niedrigen
Dichten, unabhängig von ihrer chemischen Zusammensetzung.
Figur 4. Der Druck eines Gases ist zur Temperatur des Gases proportional.
Der Ballon wird auf flüssigen Stickstoff gestellt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Temperatur und das Gasthermometer
Ah
∝h
C1
bei konstantem Druck
Es folgt, dass die Temperatur proportional zur Höhe h des Quecksilbers ist,
T=
h − h0
× 100 o C
h100 − h0
bei konstantem Druck
Um das Thermometer zu benutzen, müssen wir noch die Konstante A/
C1 bestimmen. Wir tauchen das Thermometer in ein Eis-WasserGemisch ein und messen h0. Dann messen wir die Höhe h100 beim
Siedepunkt des Wassers. Eine beliebige Temperatur wird gemessen
als
T (h) =
In einer anderen Version des Gasthermometers kann das Volumen
konstant gehalten und der Druck als thermometrische Eigenschaft
benutzt werden.
bei konstantem Volumen
Experimentell beobachtet man, dass der Druck des Gases bei konstantem Volumen proportional zur Temperatur ist:
p = C2T
375
Dieses Ergebnis ist als Gesetz von Boyle4 und Mariotte5 bekannt.
4. R. Boyle (1627-1691)
5. E. Mariotte (1620-1684)
Physik
376
Temperatur und Gase
8.3.2 Die absolute Temperatur und die Kelvin-Skala
Aus der Beobachtung des Verhaltens des Gasthermometers können
wir schliessen, dass es eine minimale Temperatur in der Natur gibt.
Man spricht vom absoluten Nullpunkt.
Bei einer Temperaturabnahme wird sich das Volumen (bei konstantem Druck) oder der Druck (bei konstantem Volumen) des Gases
reduzieren.
Experiment: Bestimmung des absoluten Nullpunktes
-100 °C
-273 °C
Temperatur
-200 °C
Durch eine Extrapolation kann man beweisen, dass der Nullpunkt bei einer Temperatur gleich –273.15°C liegt. Siehe
Abb. 5.
0 °C
Bestimmung des absoluten Nullpunkts.
100 °C
Druck p
(bei
konstantem
Volumen)
Figur 5.
Die Kelvin-Skala wird definiert mit Hilfe des Tripelpunkts des
Wassers. Beim Tripelpunkt stehen Wasserdampf, flüssiges Wasser
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Temperatur und das Gasthermometer
T3 = 273,16 K = 0, 01o C
und Eis miteinander im Gleichgewicht. Die Temperaturskala wird so
definiert, dass die Temperatur des Tripelpunkts
beträgt.
Die Einheit der (absoluten) Temperatur ist das Kelvin6 (K).
273,16 K
p
p3
Der Nullpunkt der Kelvin-Skala liegt beim absoluten Nullpunkt (ein
Wert T<0K ist unmöglich). Die Temperatur eines Körpers in der Kelvin-Skala kann mit Hilfe eines Gasthermometers bei konstantem
Volumen gemessen werden:
T=
wobei p der gemessene Druck bei der Temperatur T ist, und p3 ist der
gemessene Druck, wenn das Gasthermometer in Wasser bei dessen
Tripelpunkt getaucht wird.
377
Für geringe Dichte ist der Messwert der Temperatur unabhängig von
der Art des Gases. Die Kelvin-Skala beruht auf der Abhängigkeit des
Druckes von der Temperatur. Diese Eigenschaft besitzen alle Gase,
unabhängig von ihrer bestimmten Art.
6. Lord Kelvin (William Thomson) (1824-1907).
Physik
378
Temperatur und Gase
8.4 Gase
8.4.1 Die Zustandgleichung für ideale Gase
bei konstantem Druck
bei konstantem Volumen
Wir haben in Kap. 8.3.1 die Gesetze von Boyle-Marriote und von
Gay-Lussac gesehen
V = C1T
p = C2T
Experimentell beobachtet man, dass der Druck steigt, wenn ein Gas
bei konstanter Temperatur komprimiert wird. Wenn das Gas expandiert, so sinkt der Druck während der Volumenzunahme.
In guter Näherung ist das Produkt aus dem Druck und dem Volumen
bei konstanter Temperatur konstant. Diese Beziehung gilt für alle
Gase bei geringer Dichte.
Experiment: pV = Konst.
Der Druck eines Gases in einem Volumen wird gemessen. Im
Experiment wird das Volumen geändert und die Änderung des
Druckes als Funktion des Volumens gemessen. Wenn wir das
Volumen halbieren, wird der Druck verdoppelt.
Wenn wir zwei identische Behälter betrachten, die mit gleichen Mengen desselben Gases bei der gleichen Temperatur gefüllt sind, ist es
uns vertraut, dass man das doppelte Gasvolumen bei gleichem Druck
p und gleicher Temperatur erhält, wenn beide Behälter zusammengefügt werden. Es folgt, dass das Produkt pV proportional zur Gasmenge sein muss.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gase
Diese Ergebnisse werden in der Zustandsgleichung des idealen
Gases zusammengefasst
pV = NkT
wobei k die Boltzmann-Konstante, N die Anzahl der Gasmoleküle
und T die absolute Temperatur (die Kelvin-Skala) ist.
Wir bemerken, dass die Einheit der Boltzmann-Konstante gleich
2
3
p [V ] ( N / m )( m ) ( Nm) J
=
=
[k ] = [ ] =
N [T ]
K
K
K
ist. D.h., die Einheit der Konstante ist eine Energie geteilt durch eine
Temperatur.
Aus Experimenten weiss man, dass die Boltzmann-Konstante für alle
Gase denselben Wert hat:
k = 1,381 × 10 -23 J / K
⇒
T = 300K kT = 4,1 × 10 −21 J
379
Mit Hilfe dieser Konstante kann eine Temperatur T in eine Grösse mit
der Einheit Energie umgewandelt werden, z.B.
[kT ] = (J / K )K = J
Siehe Abb. 6.
Physik
380
Temperatur und Gase
212 F
Fahrenheit
100 C
Celsuis
373 K
Kelvin
5.15 x
10 –21
Joule
Siedepunkt
32 F
– 459 F
0 C
– 273 C
273 K
0 K
3.77 x
10 – 21
0
Gefrierpunkt
Absoluter Nullpunkt
Figur 6. Vergleich von verschiedenen Temperaturskalen. Der Siedepunkt
und der Gefrierpunkt von Wasser bei 1 atm sind angegeben.
Wenn wir n Mol eines Gases betrachten, dann enthält es die folgende
Anzahl von Molekülen
N = nN A
und die Zustandsgleichung des Gases lautet damit
pV = NkT = nN A kT = nRT
wobei R die Gaskonstante ist.Sie hat für alle Gase den Wert
R ≡ N A k = 8,314 J / mol / K
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gase
Beispiel: Die Temperatur T=273,15 K = 0°C und der Druck p=1 atm
werden als sogenannte Standardbedingungen definiert.
p = 1 atm = 1, 01325 bar = 1, 01325 × 10 5 N / m 2
T = 0°C = 273,15 K
Das Volumen von 1 Mol eines Gases bei Standardbedingungen ist
gleich
nRT
=
V=
p
1mol × 8, 314 J / mol / K × 273 K
1, 01325 × 10 5 N / m 2
=
≈ 22, 4 × 10 −3 m 3 = 22, 4 l
8.4.2 Mikroskopische Beschreibung des Gases
Bis jetzt haben wir das Verhalten der Gase mit Hilfe der sogenannten
makroskopischen Grössen p, T und V beschrieben.
Wir betrachten nun das Gas als ein System, das aus einer grossen
Anzahl von Molekülen besteht.
Die Moleküle können z.B. die folgenden sein:
1.
dreiatomig: H2O, NO2, N2O, SO2, ...
einatomig: He, Ar, Xe, Hg,...
zweiatomig: H2, O2, N2, Cl2, ...
3.
mehratomig: NH3, CH4, C2H6, ...
2.
4.
381
Die Moleküle bewegen sich “frei” im Behälter des Volumens V. Wir
nehmen an, dass die einzelnen Moleküle nicht miteinander wechsel-
Physik
382
Temperatur und Gase
wirken. D.h., wir vernachlässigen die zwischenmolekularen Kräfte.
Diese Annahme des “idealen Gases” gilt natürlich nur, wenn die
Dichte des Gases gering ist.
Die Gasmoleküle besitzen verschiedene Geschwindigkeiten und
bewegen sich in alle Richtungen.
Der Druck ist eine Konsequenz aus den Stössen der Moleküle mit
den Behälterwänden. Siehe Abb. 7.
Figur 7. Kinetische Berechnung des Druckes des Gases. Die Gasmoleküle
stossen auf die Wände des Behälters.
Ein Mol des Gases enthält schon mehr als 6×1023 Moleküle. Wie wir
schon in Kap. 7.6 erwähnt haben, ist die exakte Lösung der Bewegung einer solchen Menge von Molekülen sehr schwierig.
Wir werden statistische Methoden benutzen, um die Bewegung der
Moleküle zu beschreiben.
Am Anfang betrachten wir den vereinfachten Fall, in dem die Moleküle sich nur in der positiven und negativen x-Richtung bewegen.
Siehe Abb. 8.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gase
y
z
x
vx∆t
px=+mvx
p'x=–mvx
Fl che A
|∆px|=2mvx
Figur 8. Gasmoleküle im Behälter. Im Zeitintervall ∆t treffen diejenigen
Moleküle auf die Wand, die sich nach rechts bewegen und höchstens den
Abstand vx∆t von der rechten Wand haben.
Wir nehmen an, dass die Moleküle elastisch mit den Wänden stossen.
Die x-Komponente des Impulses vor und nach dem Stoss ist dann
gleich
vor: px = mv x
nach: px = − mv x
∆px = 2 mv x
Die Impulsänderung durch den Stoss des Moleküls ist daher
N
V
{
Teilchendichte
× (v x ∆tA) ×
123
Volumen
1
2
{
Hälfte der Moleküle
bewegt sich nach rechts
383
Die Anzahl der Moleküle, die in einem Zeitintervall ∆t auf die Wand
treffen ist
Physik
384
Temperatur und Gase
wobei A die Fläche der Wand ist.
Es folgt daraus, dass die Impulsänderung der Gasmoleküle im Zeitintervall ∆t gleich
N
1
N
× (v x ∆tA) × × 2 mv x = mv x2 A∆t
V
2
V
m∆v x N
2
mv
x A∆t
N1 2
F ∆t V
N
2
mv
=
=
= mv x2 =
V 2 x
A
A
A∆t
V
ist. Dank dem Newtonschen Gesetz können wir die Impulsänderung
im Zeitintervall ∆t mit dem makroskopischen Druck, der von N Molekülen der Geschwindigkeit vx auf die Fläche A erzeugt wird, in Beziehung setzen:
p( N , v x ) =
i =1
i
r
∑v
N
Wenn wir viele Gasmoleküle mit verschiedenen Geschwindigkeiten
betrachten, können wir z.B. ihre mittlere Geschwindigkeit definieren als
r
v ≡
N
wobei v i (i=1,...,N) die Geschwindigkeiten der Gasmoleküle sind.
Wir haben angenommen, dass der Druck eine Konsequenz aus den
Stössen von allen Molekülen ist. Nun betrachten wir den Fall, dass
die Moleküle verschiedene Geschwindigkeiten in der x-Richtung
besitzen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gase
i =1
∑v
N
2
i, x
2N 1
m v x2
V 2
1
N
p( N , v x2 ) =
Um den Druck des Gases zu berechnen, ersetzen wir in der Gleichung
für P(N,vx) die Geschwindigkeit durch den Mittelwert
wobei
v x2 ≡
die mittlere quadratische Geschwindigkeit der Moleküle in der xRichtung ist.
1 r2
v
3
r
wobei v 2 = v x2 + v y2 + v z2
v x2 = v y2 = v z2 =
i
2 1 r2
2
1 r
2
N m v = N mv 2 = N E kin
3 2
3 2
3
i =1
r2
∑v
N
r
1
v2 ≡
N
In Wiklichkeit werden sich die Moleküle in alle Richtungen bewegen.
Wenn wir annehmen, dass die Moleküle sich isotrop in alle Richtungen bewegen, erwarten wir, dass gilt
und
Es folgt
pV =
385
wobei <Ekin> die mittlere kinetische Energie der Gasmoleküle ist.
Physik
386
Temperatur und Gase
∑v
2
i
r 1
r
2
E kin ,i
= m v =
2 ∑ i i∑
=1, N
Der Ausdruck N<Ekin> ist gleich der gesamten kinetischen Energie
(Siehe Kap. 7.1.7)
1 r
1 1
N E kin = N m v 2 = N m
2
2 N
d.h., das Produkt pV ist gleich zwei Drittel der gesamten kinetischen
Energie des Gases.
2
3
⇒ kT = E kin ⇒ E kin = kT
3
2
Mit dem Gesetz des idealen Gases ist die absolute Temperatur eines
Gases direkt proportional zur mittleren kinetischen Energie eines
Gasmoleküls
pV = NkT
2
N E kin
3
pV =
Wir haben schon in Kap. 8.4.1 bemerkt, dass die Einheit der Konstante gleich einer Energie geteilt durch eine Temperatur ist.
Das Produkt kT entspricht deshalb einer Energie.
Im Fall des Gases ist das Produkt (3/2)kT gleich der mittleren kinetischen Energie eines Gasmoleküls und die gesamte kinetische Energie der N Gasmoleküle ist gleich (3/2)NkT.
8.5 Wärmekapazität
Wenn zwei Körper mit verschiedenen Temperaturen miteinander in
Berührung gebracht werden, werden sich die Temperaturen nach
einer gewissen Zeit angleichen. Bis Anfang des 19. Jahrhunderts
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit t
wurde diese Beobachtung durch die Existenz eines Wärmestoffs, der
caloricum, erklärt.
Der Wärmestoff wurde vom Körper mit höherer Temperatur zum
Körper mit niedriger Temperatur abgegeben.
Heute können wir sagen:
Die Wärme Q ist das, was allein aufgrund eines Temperaturunterschiedes zwischen zwei Körpern ausgetauscht wird.
Eine Einheit für die “Wärmeenergie” wurde eingeführt, als die Natur
der Wärme noch unbekannt war.
Die Kalorie (cal) wird definiert als die Wärmemenge Q, durch
die 1g Wasser unter Normdruck (p=1 atm) von 287.65K auf
288.65K erwärmt wird.
Wenn wir eine mikroskopische Beschreibung des Körpers benutzen,
kann der Körper als ein Teilchensystem mit einer grossen Anzahl von
Molekülen oder Atomen betrachtet werden.
r2
1
∑ m v + E pot, interne
2 i =1,N i i
Wir haben in Kap. 7.1.8 die innere Energie U eines Teilchensystems
definiert als
U = E kin + E pot, interne =
d.h, die innere Energie U des Systems wird definiert als die Summe
der kinetischen Energien der Teilchen und ihrer inneren potentiellen
Energie. Wegen der Energieerhaltung muss sich die innere Energie U
des Systems ändern, wenn wir dem Körper Energie zuführen.
387
Aus unserer Diskussionen über Temperatur und mikroskopische Vorgänge folgt ganz klar, dass man einem Körper Energie zuführen
muss, um seine Temperatur zu erhöhen.
Physik
388
Temperatur und Gase
Benjamin Thompson7 schlug erst am Ende des 18. Jahrhunderts vor,
dass die “Wärme” eine Form von Energie ist. Man muss deshalb für
die Wärmeenergie dieselbe Einheit der Energie benutzen, die für die
mechanische Energie benutzt wird.
1 Kalorie (cal) = 4,1868 Joule ( J )
Heute wird die MKS-Einheit Joule für die Wärmemenge verwendet,
und es gilt
8.5.1 Wärmekapazität und Wärmeenergie
Verschiedene Körper underscheiden sich durch die Menge von Energie, die benötigt wird, um ihre Temperatur um einen bestimmten
Betrag zu erhöhen.
Wenn wir einem Körper eine Wärmeenergie ∆Q zuführen, wird
seine Temperatur um ∆T erhöht.
∆Q
∆T
⇔
∆Q = C∆T
Die Wärmekapazität C des Körpers wird definiert als
C≡
wobei ∆Q die benötige Energie ist, um die Temperatur des Körpers
um ∆T zu erhöhen.
∆Q
∆T V = Konst
Wenn wir die Wärmeenergie bei konstantem Volumen zuführen, werden wir schreiben
CV ≡
7. Benjamin Thompson (1753-1814)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit t
∆Q
∆T
p = Konst
Bei konstantem Druck wird es geschrieben als
Cp ≡
Wir haben die Kapazität mit einem Index “V” or “p” geschrieben, um
zu zeigen, dass die Wärme bei konstantem Volumen oder bei konstantem Druck zugeführt wird.
Bei Substanzen wie Gase, die sich beim Erwärmen ausdehnen, ist die
Wärmekapazität bei konstantem Druck cp verschieden (grösser) als
die bei konstantem Volumen cV. Siehe Kap. 9.3.
∆Q
m∆T
⇔
∆Q = cm∆T
Die Wärmekapazität eines Mols einer Substanz wird als spezifische
Wärmekapazität c bezeichnet. Die spezifische Kapazität einer Substanz ist deshalb
c≡
wobei c=cp oder cV , und m die molare Masse ist (Siehe Kap. 7.4).
Man spricht z.B. von der Wärmekapazität C eines Gegenstands, aber
von der spezifischen Wärmekapazität c von Kupfer.
Te
Ta
Q = ∫ dQ = ∫ cV (T ) mdT
389
Die Wärmemenge, die man z.B. bei konstantem Volumen zuführen
muss, um einen Körper von Ta auf Te zu erwärmen ist gleich
Physik
390
Temperatur und Gase
Wenn die Temperaturänderung nicht zu gross ist, wird man die spezifische Wärmekapazität c(T) als eine Konstante betrachten, und es gilt
e
a
V
Q = c m(T − T ) = c m∆T
V
8.5.2 Wärmekapazität eines (einatomigen, idealen)
Gases
Wir betrachten nun ein Gas. Seine innere Energie hängt von der kinetischen und potentiellen Energie seiner Moleküle ab.
Die potentielle Energie hängt vom intermolekularen Abstand, d.h.
vom Volumen oder der Dichte des Gases ab.
Im Fall des idealen Gases ist die innere Energie nur kinetische Energie, und die potentielle Energie ist vernachlässigbar
U ideal = E kin + E pot, interne = N E kin
3
+ 0 = N kT
2
wobei N die Anzahl der Gasmoleküle ist. Für ein ideales Gas hängt
die innere Energie nur von der Temperatur ab.
Wenn wir ein Mol des Gases betrachten, dann finden wir
3
3 3
U ideal (1mol) = N A kT = N A kT = RT
2 2
2
Wenn wir die Temperatur um ∆T erhöhen, erhöht sich die innere
Energie um (3/2)R∆T.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit t
∆Q ∆U ideal
d 3
3
=
=
NkT = Nk
2
∆T
∆T
dT 2
Die Wärmekapazität CV des idealen Gases (bei konstantem Volumen) ist daher gleich
CV =
Für ein Mol ist die spezifische Wärmekapazität gleich
dU (1mol) 3
ideal
cV ≡
= R
dT
2
3
(8, 31 J / mol / K ) ≈ 12.5 J / mol / K
2
≈
Wir brauchen 12.5 J pro Mol, um die Temperatur eines idealen Gases
um 1K zu erhöhen.
8.5.3 Wärmekapazität eines Festkörpers
Die Wärmekapazitäten (pro g) von Festkörpern haben sehr unterschiedliche Werte.
Siehe Tabelle 2.
Wenn wir uns auf die spezifische Wärmekapazitäten beziehen, d.h.
auf die Anzahl der Atome und nicht auf die Masse, werden die Werte
nicht mehr so unterschiedlich.
Es gibt wenige Ausnahmen, wie z.B. Beryllium, Bor und Diamant.
Diese Fälle werden als “anomal” bezeichnet und werden später betrachtet. Siehe Kap. 8.8.2.
391
Man sieht auch, dass Wasser im Vergleich zu den meisten
Festkörpern eine hohe Wärmekapazität besitzt.
Physik
392
Temperatur und Gase
Dass die spezifischen (pro Mol) Wärmekapazitäten von Festkörpern
sehr ähnliche Werte aufweisen, wird als Dulong-Petitsche Regel8
bezeichnet:
cV ≈ 25 J / mol / K
Dieses Verhalten wird natürlich mit der Atomtheorie des Materieaufbaus erklärt. Wir beobacthen, dass der Wärmebetrag, der benötigt
wird, um die Temperatur pro Atom um 1 K zu erhöhen, vom Stoff
unabhängig ist.
Stoff
0,386
0,9
Wärmekapazität
in J/g/K
108
207
63.5
27
molare Masse
in g/mol
25,5
26,5
24,5
24,4
spezifische
Wärmekapazität
in J/mol/K
verschiedener Stoffe bei Zimmertemperatur
Aluminium
0,128
und einem Druck von 1 atm.
TABLE 2. Wärmekapazitäten
Kupfer
0,236
11
Blei
13
Silber
Beryllium
75,4
6
18
Bor
4,182
Kohlenstoff(Diamant)
Wasser
In Festkörpern schwingen die Atome oder Moleküle um ihre Gleichgewichtslage. Wenn das Volumen des Körpers konstant gehalten
wird, so dass die Abstände der Atome ungeändert bleiben, tritt die
zugeführte Wärmeenergie nur als Schwingungsenergie auf.
8. Dulong und Petit (1819).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit t
Wenn man die spezifische (pro Mol) Wärmkapazität betrachtet, hat
man es beim Vergleich verschiedener Stoffe immer mit derselben
Anzahl von Atomen zu tun. Es folgt, dass die spezifischen (pro Mol)
Wärmekapazitäten von Festkörpern sehr ähnliche Werte aufweisen
müssen.
Experiment: Spezifische Wärme von Al und Pb
Wir benutzen 14 Mol von Al und Pb
Molare Masse: mPb = 207 g/mol mAl = 27 g/mol
Masse: MPb = 14×207 ≈ 2900 g mAl = 14×27≈380 g
a
W
V
W
W
V
W
V
W
a
393
MW=500 g MWCVW=2090 J/K
ncV(Pb) ≈ ncV(Al) ≈ 25×14 = 350 J/K
Wasser: CVW=4,182 J/g/K
Wärme wird auf das Wasser übertragen:
CVW M W (Te − TaW ) = ncV (Ta − Te )
wobei Ta und Te die Anfangs- und Endtemperatur sind.
V
(nc T + C M T )
(C M + nc )
(2090J / K + 350J / K )
((350J / K )(373K ) + (2090J / K )(293K )) ≈ 300K
≈ 30 o C
≈
Te =
Mit Ta≈373K und TaW≈293K finden wir
Physik
394
Temperatur und Gase
Klassischer Gleichverteilungssatz
8.7 Klassischer Gleichverteilungssatz
Bis jetzt haben wir die spezifische Wärmekapazität von Gasen aus der
kinetischen mikroskopischen Beschreibung erklärt.
8.6 Latente Wärme
Wird einem Körper Wärme zugeführt, steigt im allgemeinen seine
Temperatur.
Mit diesem Modell konnte man die spezifische Wärmekapazität von
einatomigen Gasen wie z.B. Helium erklären.
Blei
Wasser
Substanz
54,4
—
600
273,15
Schmelzpunkt (K)
205
26
14
—
25
333
LSchmelz (J/g)
2839
77,35
90,2
4,2
2020
373,15
Siedepunkt
(K)
200
210
20
860
2260
LVerdampfung
(J/g)
Physik
395
Wir betrachten nun die verschiedene Freiheitsgrade der Gasmoleküle.
Wir nehmen eine “klassische” Darstellung der Moleküle an. Wir werden in Kap. 8.8 sehen, dass eine solche Darstellung nicht ganz richtig
ist.
Jede Möglichkeit eines Moleküls, eine der verschiedenen Formen der
Energie zu absorbieren, nennt man Freiheitsgrad f.
Die Rotation oder die Schwingung können z.B. bei Zusammenstössen angeregt werden.
Alle Bewegungsformen (Translation, Rotation, Schwingung)
werden im Prinzip zur inneren Energie U des Gases beitragen.
Unter dieser Annahme kann man sich neben der Translationsbewegung der Moleküle auch eine Rotation und Schwingung der Moleküle vorstellen.
Ein solches Molekül wird nicht als ein starres kugelförmiges Teilchen
gesehen, das sich in alle Richtungen bewegt (die sogenannte Translationsbewegung der Gasmoleküle), das Molekül besitzt auch eine
interne Struktur.
Alle anderen Gasatome (mit der Ausnahme von Edelgasen wie
Helium, Argon, usw.) bilden Moleküle.
Wir wissen, dass bei einer bestimmten Temperatur und einem
bestimmten Druck eine Wärmezufuhr keine Temperaturerhöhung verursacht, nämlich wenn ein Phasenübergang stattfindet.
Die benötigte Wärme Q, um einen Phasenübergang (ohne Temperaturänderung) zu machen, ist zur spezifischen latenten Wärme L
proportional
Q = LM
wobei M die Masse des Körpers ist.
Einige Schmelz- und Siedepunkte und die spezifischen latenten Wärmen sind in Tabelle 3 aufgelistet.
Helium
63
und Siedepunkte und spezifische latente Wärme
Sauerstoff
1356
(bei p=1 atm)
TABLE 3. Schmelzpunkte
Stickstoff
4730
Kupfer
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
396
Temperatur und Gase
y
x
z
Rotation
um y-Achse
Rotation
um x-Achse
f einatomig = 3( Translation)
Wenn das Molekül einatomig (n=1) ist, kann es sich in 3 unabhängige Richtungen bewegen, und es soll 3n=3 (kinetischen) Freiheitsgrade besitzen. Die Translationsbewegung hat drei Freiheitsgrade,
einen für jede Raumrichtung.
a)
b)
c)
Rotation
um z-Achse
Figur 9. Die drei unabhängigen Rotationsfreiheitsgrade eines zweiatomigen
Moleküls. Wenn wir die Atome als Kugeln betrachten, dann zählt die
Rotation um die z-Achse nicht, und es gibt nur zwei unabhängige
Rotationsfreiheitsgrade.
Wenn das Molekül zweiatomig (n=2) ist, können sich im Prinzip
beide Atome in 3 unabhängige Richtungen bewegen, und das Molekül soll 3n=6 (kinetischen) Freiheitsgrade besitzen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Klassischer Gleichverteilungssatz
Die 6 Freiheitsgrade werden auf 3 Translations- und 3 Rotationsfreiheitsgrade verteilt. Die drei unabhängigen Rotationsfreiheitsgrade
eines Moleküls sind in Abb. 9 gezeigt. Wenn wir die Atome als
Kugeln betrachten, dann zählt die Rotation um die z-Achse nicht, und
es gibt nur zwei unabhängige Rotationsfreiheitsgrade. Der letzte
(kinetische) Freiheitsgrad entspricht dann der Schwingungsbewegung.
f zweiatomig = 3( Translation) + 2(Rotation) + 1(Schwingung) = 6
In Wirklichkeit beobachtet man, dass die Schwingungsbewegung
mehr als 1 Freiheitsgrad entspricht, weil es kinetische und potentielle
Freiheitsgrade gibt. Siehe Kap. 8.8.
Im Allgemeinen soll ein Molekül mit n Atome genau
f n − atomig = 3n
(kinetischen) Freiheitsgrade besitzen.
Mit Hilfe der klassischen Mechanik hat J.C. Maxwell im Jahr 1858
gezeigt, dass für eine grosse Anzahl von Molekülen (die sich im thermischen Gleichgewicht befinden), alle oben genanten Freiheitsgrade
dieselbe mittlere Energie speichern, die nur von der Temperatur
abhängt.
Die Aussage heisst Gleichverteilungssatz der Energie oder
Äquipartitionstheorem. Es sagt:
397
Befindet sich ein Körper im thermischen Gleichgewicht,
besitzt jeder Freiheitsgrad eine mittlere Energie von (1/2)kT
pro Moleküle ((1/2)RT pro Mol)).
Physik
398
Temperatur und Gase
Es folgt daraus, dass die innere Energie U des Körpers mit f Freiheitsgraden gleich
1
1
1
U = f NkT = f nN A kT = f nRT
2
2
2
ist, wobei N die Anzahl der Moleküle und n die Stoffmenge ist.
Die spezifische (pro Mol) Wärmekapazität ist daher gleich
dU (1mol)
1
cV =
= f R
2
dT
Die Aussage des Gleichverteilungssatzes kann mit den experimentellen Werten verschiedener Stoffe verglichen werden. Die vorausgesagten und gemessenen Werte sind für verschiedene Gase in Tabelle 4
gezeigt.
Bei manchen zweiatomigen Gasen und den meisten mehratomigen
Gasen sind die Wärmekapazitäten kleiner als die, die wir vorausgesagt haben.
Helium
Art des Gases
1
1
Anzahl der
Teilchen
3
3
3
Freiheitsgrade
3/2R = 12,5
3/2R = 12,5
3/2R = 12,5
Vorausgesagt
CV (J/mol/K)
20,80
12,45
12,45
12,68
12,52
Gemessen CV
(J/mol/K)
verschiedener Gase bei 20°C und 1 atm.
Neon
1
6/2R = 25
3/2R = 12,5
TABLE 4. Wärmekapazitäten
Argon
6
3
20,44
2
6/2R = 25
1
6
Krypton
2
Stickstoff N2
Wasserstoff
H2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Klassischer Gleichverteilungssatz
Kohlenmonoxid CO
Sauerstoff O2
Art des Gases
5
3
2
2
Anzahl der
Teilchen
15
9
6
6
Freiheitsgrade
15/2R = 62,5
9/2R = 37,5
6/2R = 25
6/2R = 25
Vorausgesagt
CV (J/mol/K)
29,00
28,17
20,74
20,98
Gemessen CV
(J/mol/K)
verschiedener Gase bei 20°C und 1 atm.
Kohlendioxid
CO2
TABLE 4. Wärmekapazitäten
Methan CH4
Bevor wir eine Erklärung finden, wollen wir nun die Wärmekapazität
von Festkörpern mit Hilfe des Gleichverteilungssatzes voraussagen.
⇒ f =6
Wir nehmen an, dass der Festkörper aus einer regelmässigen Anordnung von NA Atomen pro Mol besteht. Die gemessenen und die von
der Regel von Dulong-Petit vorausgesagten Werte ergeben:
1
cV ≈ 25 J / mol / K = f R
2
d.h. wir finden, dass die Atome im Festkörper 6 Freiheitsgrade besitzen.
r2
1
∑ mv + E pot, interne
2 i =1,N i
Im Festkörper ist die innere Energie gleich
U = E kin + E pot, interne =
wobei Epot,interne der potentiellen Energie der zwischenatomaren
Kräfte entspricht.
399
Wenn ein Atom sich in seiner Gleichgewichtslage befindet, ist seine
potentielle Energie gleich Emin. Wenn ein Atom aus seiner Gleichge-
Physik
400
Temperatur und Gase
wichtslage ausgelenkt wird, wird seine potentielle Energie zunehmen.
=E
pot
r
( ∆r ) = E
i
min
2
1 d E pot r r 2
+
( r0 ) ( ∆ri ) + ...
2 dr 2
Die potentielle Energie des Atoms i hängt von seiner Auslenkung aus
der Gleichgewichtslage ab (Siehe potentielle Energie von Leonard
Jones in Kap. 7.3):
E
i, pot ,int erne
r 2
1
= E + k ( ∆r ) + ...
min
i
2
1
1
1
2
2
2
= E min + k ( ∆x i ) + k ( ∆y i ) + k ( ∆zi ) ...
2
2
2
wobei ∆xi, ∆yi, und ∆zi den 3 unabhängigen Auslenkungsrichtungen
entsprechen.
Es folgt, dass
3 Freiheitsgrade
3 Freiheitsgrade
r2 1
r 2
1
U = m ∑ v i + k ∑ ( ∆ri )
2 =1,N
2 i =1,N
14i2
43 14
4244
3
und jedes Atom besitzt sechs (3 kinetische und 3 potentielle) Freiheitsgrade.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit ten und die klassische Mechanik
8.8 Wärmekapazitäten und die
klassische Mechanik
8.8.1 Wärmekapazitäten von Gasen
Wir haben gesehen, dass bei manchen zweiatomigen Gasen und den
meisten mehratomigen Gasen die Wärmekapazitäten kleiner sind, als
die, die wir vorausgesagt haben.
Um dieses Verhalten von Gasen zu erklären, wird die Temperaturabhängigkeit der spezifischen (pro Mol) Wärmekapazität von Wasserstoff in Abb. 10 gezeigt.
Man spricht von eingefrorenen Freiheitsgraden.
Bei einer Temperatur T < 100K ist die Wärmekapazität gleich (3/2)R,
ein Wert, der für ein einatomiges Gases erwartet wird.
In diesem Temperaturbereich (und Temperatur entspricht einer Energie, deshalb können wir auch Energiebereich sagen) können die Rotation und Schwingung des Wasserstoffmoleküls nicht angeregt
werden. Die Rotations- und Schwingungsfreiheitsgrade existieren
nicht. Sie sind eingefroren.
Bei dieser Temperatur verhält sich das Wasserstoff-Molekül wie eine
inkompressible Kugel.
Bei Zimmertemperatur ist die Wärmekapazität gleich (5/2)R. Zwei
zusätzliche Freiheitsgrade sind erschienen und thermische Energie
wird nun auch in diesen internen Bewegungen gespeichert.
401
Oberhalb von 750K nimmt die Wärmekapazität stetig auf (7/2)R zu.
Bei diesen hohen Temperaturen nehmen die Zusammenstösse zwischen den Molekülen zu, und es werden Schwingungen angeregt.
Physik
402
Temperatur und Gase
1 2 1 2
µv + kx
2 rel 2 rel
Die Schwingung erscheint als 2 Freiheitsgrade, weil sie die Form
50
100
Translation
Rotation
7
2
5
2
3
2
5000 10,000
Schwingung
besitzt, wobei µ eine reduzierte Masse (Siehe Kap. 7.1.3) und x ein
Abstand ist.
4
3
2
1
0
20
200
500 1000 2000
Temperatur (K)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Obwohl diese Erklärung mit den experimentellen Daten übereinstimmt, widerspricht sie der klassischen Mechanik. Die klassische
Theorie kennt keine Abhängigkeit der spezifischen Wärmekapazitäten von der Temperatur.
Figur 10. Temperaturabhängigkeit der spezifischen (pro Mol)
Wärmekapazität für Wasserstoff. Da Wasserstoff bei 3200K dissoziiert,
bezieht sich die gestrichelte Kurve auf ein undissoziiertes
Wasserstoffmolekül.
CV/R
W rmekapazit ten und die klassische Mechanik
8.8.2 Anomale Wärmekapazitäten von Festkörpern
Nun betrachten wir die “anomalen” Stoffe, wie z.B. Beryllium.
In Abb. 11 ist die spezifische (pro Mol) Wärmekapazität von Blei,
Aluminium und Beryllium als Funktion der Temperatur aufgetragen.
Figur 11. Spezifische (pro Mol) Wärmekapazitäten dreier Festkörper als
Funktion der Temperatur in Kelvin.
403
Wir sehen, dass sich cV für alle drei Elemente bei hohen Temperaturen demselben Grenzwert nähert. Dass sich Beryllium “anomal” verhält, folgt aus der Tatsache, dass für Beryllium die Zimmertemperatur
nicht als sehr hohe Temperatur angesehen werden kann.
Experiment: Debye-Temperatur
Pb und Al werden auf 80K abgekühlt.
Physik
404
Temperatur und Gase
Tatsächlich nähern sich die spezifischen Wärmekapazitäten dem Wert
Null bei T≈0K und dem Dulong-Petit-Wert bei hohen Temperaturen.
Im Jahre 1912 entwickelte Debye9 eine neue Theorie, die eine charakteristische Temperatur, die Debye-Temperatur θD, liefert. Die
Debye-Temperatur ist eine für jedes Material konstante und charakteristische Grösse. Sie beträgt z.B.
θ D ,Blei = 88K
θ D ,Kohlenstoff = 1860K
Die Debye-Temperatur wird mittels der Quantentheorie direkt mit
einer materialspezifischen Schwingungsfrequenz in Beziehung
gebracht. Die Theorie sagt voraus, dass als Funktion der dimensionslosen Grösse T/θD, die Wärmekapazitäten aller Stoffen den gleichen
Verlauf zeigen.
Die experimentelle Bestätigung (Siehe Abb. 12) ist einer der Erfolge
der Quantentheorie.
8.8.3 Schlussbemerkung
Damit stossen wir an die Grenzen der klassischen Mechanik.
So wie die Newtonschen Gesetze bei sehr hohen Geschwindigkeiten
versagen (Siehe Kap. 6.8), verlieren sie auch im atomaren oder molekularen Bereich ihre Gültigkeit.
Im Bereich sehr kleiner Dimensionen wird die Newtonsche Mechanik durch die Quantentheorie ersetzt (Siehe Kap. 13).
9. P. Debye (1884-1966).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmekapazit ten und die klassische Mechanik
Figur 12. Spezifische (pro Mol) Wärmekapazitäten für einige Stoffe als
ΘD.
Funktion der dimensionslosen Temperatur T/Θ
Physik
405
406
Temperatur und Gase
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 9
Thermodynamik
9.1 Hauptsätze der Thermodynamik
Das zentrale Konzept der Thermodynamik ist die Existenz der Temperatur (der sogenannte “nullter” Hauptsatz der Thermodynamik).
Wir betrachten z.B. zwei Körper A und B. Der Körper A erscheint
uns heiss, und der Körper B erscheint uns kalt. Wir bringen A in Kontakt mit B.
Nach einer gewissen Zeit erscheinen uns beide Körpern gleich warm.
Beide Körper besitzen über ihre ganze Ausdehnung die gleiche Temperatur. Wir sagen, dass beide Körper sich im thermischen Gleichgewicht befinden.
407
Vom makroskopischen Standpunkt aus stellt die Temperatur
eine Grösse dar, die in verschiedenen Systemen schliesslich
denselben Wert annimmt, wenn diese Systeme miteinander
in Kontakt gebracht werden.
Physik
408
Thermodynamik
Vom mikroskopischen Standpunkt aus beschreibt die Temperatur die thermische Bewegung der Atome oder der Moleküle. Diese entspricht der inneren Energie U des Körpers,
die die kinetische und die potentielle Energie aller Moleküle
beinhaltet.
U = U ( p,V , T ,...)
Die innere Energie U wird als eine Zustandsfunktion des Körpers
bezeichnet. Sie hängt vom Zustand des Körpers ab und wird durch
den Druck, das Volumen, die Temperatur, usw... des Körpers charakterisiert:
Die Thermodynamik beschreibt thermische Vorgänge, in denen ein
Körper aufgrund seiner Wechselwirkung mit seiner Umgebung von
einem thermischen Gleichgewichtszustand (Anfangszustand) in einen
anderen (Endzustand) gelangt.
→
U E = U ( pE ,VE , TE ,...)
Während des Vorganges kann sich die innere Energie U des Körpers
ändern:
U A = U ( pA ,VA , TA ,...)
Wir bemerken, dass die Änderung der inneren Energie nur vom
Anfangs- und Endzustand abhängt, und nicht von den Zwischenzuständen
∆U ≡ U E − U A
Haupts tze der Thermodynamik
Wenn wir einem Körper Wärme zuführen, wird sich seine innere
Energie ändern.
In gleicher Weise kann man dem Körper Energie durch mechanische
Arbeit W zuführen.
Experimente:
Blei hämmern und die fallende Kugel: Wegen mechanischen
Stössen wird sich die Temperatur eines Körpers erhöhen.
Die mechanische Arbeit und die Wärmeenergie stellen nur verschiedene Formen der Energie dar (Äquivalenz zwischen mechanischer
Arbeit und Wärme, Joule (1850)).
Der erste Hauptsatz1 der Thermodynamik drückt die Äquivalenz
und die Energieerhaltung aus. Er sagt:
Die innere Energie U eines Körpers kann sowohl durch
Zufuhr von Wärme als auch durch Leistung von mechanischer
Arbeit verändert werden.
Wird der Körper einer infinitesimal kleinen Zustandsänderung unterzogen, gilt
dU = dQ + dW
wobei dU die infinitesimale Änderung der inneren Energie U,
dQ die zugeführte Wärme und dW die vom Körper geleistete
Arbeit ist.2
1. Wurde in der Vorlesung als zweiter Haupsatz bezeichnet.
2. dU ist ein totales Differential der Zustandsfunktion U. W und Q sind keine Zustandsfunktionen. dW und dQ sind im mathematischen Sinn keine totalen Differentiale, sie stellen
nur sehr kleine Grössen dar. Man bezeichnet sie häufig als δQ und δW.
Im Kap. 8.5 haben wir gesagt, dass sich wegen der Energieerhaltung
die innere Energie U des Systems ändern muss, wenn wir einem Körper Energie zuführen.
Die Wärme Q ist eine Form der Energie, die allein aufgrund eines
Temperaturunterschiedes zwischen zwei Körpern ausgetauscht wird.
Physik
409
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
410
Thermodynamik
9.2 Mechanische Arbeit eines
expandierenden Gases
Wir beginnen mit einer idealisierten Anordnung, in der sich ein Gas
bei einem Druck p in einem Behälter befindet. Der Behälter wird mit
einem reibungsfrei beweglichen Kolben der Fläche A verschlossen.
Siehe Abb. 1.
Das Gas bewirkt eine nach aussen gerichtete Kraft F auf den Kolben,
wobei
F = pA
Wegen dieser Kraft wird sich der Kolben in der Abb. 1 nach rechts
bewegen. Das Gas expandiert.
dV = Adx
Die mechanische Arbeit, die benötigt wird, um den Kolben zu bewegen, wird vom Gas geleistet.
pA
dx
Figur 1. Die vom Gas geleistete Arbeit während der Expansion dV. Der
Druck des Gases ist als p bezeichnet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die W rmekapazit ten CV und Cp
Wenn der Kolben eine Verschiebung dx nach rechts ausführt, ist die
vom Gas geleistete Arbeit gleich
dW = − Fdx = −( pA) dx
Beachte das negative Vorzeichen! Wir definieren die vom Gas geleistete Arbeit so, dass seine innere Energie U abnimmt, wenn das Gas
expandiert.
Bei einer Kompression des Gases ist dx negativ und dW positiv, d.h.
seine innere Energie U erhöht sich.
dV = Adx
Nach dieser Expansion hat sich das Volumen des Gases vergrössert
und wir finden
dW = − pdV
411
Diese Beziehung gilt für eine beliebige Expansion eines Gases. Wenn
das Volumen eines Gases von V bis V+dV expandiert, ist die vom Gas
geleistete Arbeit gleich pdV, unabhängig von der Form des Behälters.
CdT ≡ dQ
9.3 Die Wärmekapazitäten CV und Cp
dQ
⇔
dT
Wir haben die Wärmekapazität C als
C≡
definiert (Siehe Kap. 8.5.2).
Physik
412
Thermodynamik
Wird einem Gas bei konstantem Volumen eine Wärme dQV zugeführt,
so tritt keine mechanische Volumenarbeit –pdV auf, d.h.
dW = − pdV = 0 bei konstantem Volumen
dU = dQ + dW
⇒
dU = dQV
und die ganze Wärme dQV wird benutzt, um die Temperatur des
Gases zu erhöhen. Es folgt, dass die Wärme dQV gleich der Änderung der inneren Energie U ist.
Man schreibt
dQV = dU = CV dT bei konstantem Volumen
wobei dU die Änderung der inneren Energie U ist.
Wenn wir dem Gas bei konstantem Druck Wärme zuführen, dehnt
sich das Gas aus, und deshalb wird das Gas eine Arbeit –pdV leisten.
Eine Konsequenz ist, dass nur ein Teil der zugeführten Energie zur
Erhöhung der inneren Energie benutzt werden kann.
Um dieselbe Temperaturerhöhung wie bei konstantem Volumen zu
bewirken, muss bei konstantem Druck mehr Energie zugeführt werden, d.h.
C p > CV
Die Wärmekapazität bei konstantem Druck wird definiert als
dQp = C p dT bei konstantem Druck
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die W rmekapazit ten CV und Cp
⇒
⇒
dQp − pdV = dU
dQp = dU + pdV
dQp + dW = dU
Wegen der Energieerhaltung muss die Erhöhung der inneren Energie
dU gleich der Summe der zugeführten Wärmeenergie dQp und der
vom Gas geleisteten mechanischen Arbeit dW sein
Es folgt,
C p dT = CV dT + pdV
Im Fall des idealen Gases erhalten wir
pV = nRT ⇒ ( p + dp)(V + dV ) = nR(T + dT )
⇒ pV + Vdp + pdV + dpdV = nR(T + dT )
⇒ Vdp + pdV ≈ nRdT
für ein ideales Gas
pdV ≈ nRdT
wobei wir dpdV als vernachlässigbar relativ zu Vdp und pdV betrachtet haben. Wenn dp=0, finden wir
und es folgt
C p = CV + nR
413
Die gemessenen CV und Cp für einige Gase sind in Tabelle 1 aufgelistet. Wie vorausgesagt, ist deren Differenz ungefähr gleich der Gaskonstante R.
Physik
414
Thermodynamik
O2
H2
N2
Ar
Ne
He
Gas
36,62
29,37
28,82
29,12
20,79
20,79
20,79
Cp (J/mol/K)
27,36
28,17
20,98
20,44
20,80
12,45
12,68
12,52
Cv (J/mol/K)
8,76
8,45
8,39
8,38
8,32
8,34
8,11
8,27
Cp-Cv (J/mol/K)
(pro Mol) Wärmekapazitäten (in J/mol/K) bei 25°C.
CO2
36,12
TABLE 1. Spefizische
H2O
9.4 Thermische Prozesse des idealen
Gases
Wir betrachten nun die thermischen Prozesse von idealen Gasen.
9.4.1 Isobare Zustandsänderung
⇒
Va
W = − ∫ pdV
Ve
Wir haben in Kap. 9.2 gesehen, dass ein expandierendes Gas die
Arbeit W leistet
dW = − pdV
wobei Va und Ve die Anfangs- und Endvolumen des Gases sind.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Prozesse des idealen Gases
bei konstantem Druck
Bei isobaren Zustandsänderungen wird der Druck p konstant
gehalten
Va
Ve
W = − p ∫ dV = − p(Ve − Va )
Beispiel: Wir betrachten den Vorgang des Siedens von Wasser.
Bei einer Temperatur T=100°C und einem Druck p=1 atm wird Wasser von der flüssigen Phase in die gasförmige Phase übergehen.
Bei p=1 atm werden aus 1 g Wasser (VF=1cm3) nach dem Verdamp-
fen VD=1671 cm3 Dampf.
Die spezifische (pro Masse, latente) Verdampfungswärme LV von
Wasser bei diesem Druck ist 2260 J/g.
Wärmeenergie für das Verdampfen von 1 g Wasser (Siehe Kap. 8.6)
Q = LV M = 2260 J
Die beim Ausdehnen von VF auf VD bei konstantem Druck geleistete
Arbeit
W = − p(Ve − Va ) = −(101, 3 × 10 3 Pa)(1671 − 1cm 3 ) = −170 J
415
Diese Arbeit wird vom Wasser geleistet und ist deshalb negativ zu
rechnen.
∆U = Q + W = 2260 − 170 = 2090 J
Änderung der inneren Energie U:
Physik
416
Thermodynamik
Nur ein kleiner Teil der zugeführten Energie (nämlich 170J) wird in
(äussere) mechanische Arbeit umgewandelt. Der grösste Teil (nämlich 2090 J) wird zur Erhöhung der inneren Energie benutzt. Diese
Energie ist zur Trennung der Wassermoleküle voneinander nötig.
9.4.2 Isotherme Ausdehnung und Umwandlung von
Wärme in mechanische Arbeit
Wir haben in Kap. 9.1 ein Beispiel gesehen, in dem die Temperatur T
eines Körpers durch eine Zufuhr von mechanischer Energie W erhöht
wurde.
Nun betrachten wir ein Beispiel, in dem eine Wärme Q mit einem
Wirkungsgrad von 100% in mechanische Energie W umgewandelt
wird.
Wir betrachten die isotherme Expansion eines idealen Gases von
einem Gasvolumen V1 zum V2.
Die Temperatur T des Gases wird in einer isothermen Expansion konstant gehalten.
Wenn T=Konst., ist für das ideale Gas pV=Konst., und der Druck p
and das Volumen V ändern sich gleichzeitig während des gesamten
Expansionsvorgangs.
Die Geschwindigkeit der Expansion wird mit Hilfe der Kraft F kontrolliert, die auf den Kolben wirkt. Siehe Abb. 2.
nRT
dV
V
Wenn das Gas expandiert, leistet es eine mechanische Arbeit W auf
den Kolben. Für eine kleine Expansion dV ist die vom idealen Gas
geleistete Arbeit gleich
dW = − pdV = −
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Prozesse des idealen Gases
Diese Arbeit ist gleich der von der Bewegung des Kolbens geleisteten
Arbeit.
F
F
Würden wir dem Gas keine Wärme zuführen, käme die Energie von
der inneren Energie des Gases. Die Abnahme der inneren Energie
würde als Temperaturabnahme des Gases beobachtet.
V1
Temperatur T (Wärmereservoir)
Q
V2
Temperatur T (Wärmereservoir)
Q
Figur 2. Isotherme Expansion eines Gases. Um die Temperatur des Gases
während der Expansion konstant zu halten, muss Wärme zugeführt
werden.
Um die Temperatur des Gases während der Expansion konstant zu halten, müssen wir gleichzeitig Wärme zuführen.
T = Konst. ⇒ U ≡ U (T ) = Konst. ⇒ dU = 0
417
Da die innere Energie des idealen Gases nur von der Temperatur
abhängt, folgt
Physik
418
Thermodynamik
dU = dQ + dW = 0
und mit der Energieerhaltung
⇒
dQ = − dW
Weil die Temperatur des Gases konstant ist, wird die gesamte zugeführte Wärme in mechanische Arbeit umgewandelt!
V2
V1
V2
V
dV
=nRT ln 2
V
V1
Für die ganze isotherme Expansion ist die gesamte zugeführte
Wärme Q gleich
V1
Q = ∫ dQ = − ∫ dW = −W = ∫ pdV = nRT ∫
isotherm
T
V2 Volumen
pV=Konst.
Eine solche Expansion kann man mit Hilfe eines sogenannten pVDiagramms graphisch dargestellt werden. Siehe Abb. 3.
Druck
p1
p2
V1
Figur 3. pV-Diagramm der isothermen Expansion. Der Betrag der
geleisteten Arbeit ist gleich der getönten Fläche.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Prozesse des idealen Gases
Im pV-Diagramm entspricht jeder Punkt (x=V,y=p) der Ebene einem
bestimmten Zustand des Gases.
Ve
Im Fall des idealen Gases entspricht eine Kurve pV=Konst einer
bestimmten Temperatur oder inneren Energie.
Weil die geleistete Arbeit gleich
Va
W = − ∫ pdV
ist, ist in einem pV-Diagramm der Betrag der geleisteten Arbeit gleich
der Fläche unter der Kurve.
9.4.3 Adiabatische Ausdehnung
adiabatisch
Während der adiabatischen Ausdehnung des Gases wird keine
Wärme ausgetauscht
Q≡0
Wir betrachten die Expansion eines idealen Gases, das sich in einem
thermisch isolierten Behälter befindet.
⇒
dU = dW
⇒
∆U = ∫ dW = W
Weil das Gas keine Wärme aufnehmen oder abgeben kann, ist die
geleistete Arbeit gleich der Abnahme der inneren Energie U:
dU = dQ + dW
Es folgt, dass die Temperatur des Gases während der adiabatischen
Expansion abnimmt.
419
Bei der adiabatischen Expansion wird die Wärmeenergie, die
im Gas gespeichert ist, in mechanische Arbeit umgewandelt.
Physik
420
Thermodynamik
adiabatisch
V2 Volumen
T2
Wir nehmen an, dass die Anfangs- und Endtemperaturen gleich T1
und T2 sind. Siehe Abb. 4.
T1
V1
pV-Diagramm der adiabatischen Expansion des Gases.
p2
p1
Druck
Figur 4.
Bei der adiabatischen Expansion nimmt der Druck p stärker ab als bei
der isothermen Expansion mit gleicher Volumenzunahme, weil die
Temperatur T abnimmt und pV=nRT gilt.
und
dU = CV dT
Nun bestimmen wir die pV-Kurve der adiabatischen Expansion.
Es gilt
dU = dQ + dW = 0 − pdV
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Thermische Prozesse des idealen Gases
nRT
dV = 0
V
dV
dT
+ nR
=0
V
T
CV dT + pdV = CV dT +
Mit der Zustandsgleichung des idealen Gases erhalten wir
oder
CV
C p = CV + nR
für ein ideales Gas
)
dV
dT
+ C p − CV
=0
V
T
(
Im Kap. 9.3 haben wir gesehen, dass
und daher
CV
)
γ≡
Cp
CV
Wir definieren den Koeffizient γ als das Verhältnis
und damit
(
TV γ −1 = Konst.
C − CV dV dT
dT
dV
p
+
=
+ (γ − 1)
=0
T
CV
V
T
V
ln T + (γ − 1) ln V = Konst. ⇒
Durch Integration erhalten wir
Physik
421
422
Thermodynamik
Mit pV=nRT finden wir noch
pV γ −1
V = Konst. ⇒
nR
pV γ = Konst.
Die Koeffizienten γ für die Gase, die in Tabelle 4 in Kap. 8.7 aufgelistet sind, sind die folgenden: Helium He, Argon Ar γ=1,66; Stickstoff
N2, Sauerstoff O2 γ=1,40; Kohlendioxid CO2 γ=1,28; Methan CH4
γ=1,29.
Die adiabatische und isotherme Expansionen sind in Abb. 5 gezeigt.
Die vom Gas geleistete Arbeit ist gleich der Fläche unter der Kurve
im pV-Diagramm.
In beiden Fällen sinkt der Druck p.
Die während der adiabatischen Expansion geleistete Arbeit ist kleiner
als die der isothermen Expansion (für gleiche Volumenänderungen).
Das ist zu erwarten, weil bei der adiabatischen Expansion die mechanische Arbeit auf Kosten der inneren Energie geleistet wird, und bei
der isothermen Expansion die zugeführte Wärme in mechanische
Arbeit umgewandelt wird.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
a
th e
rm
pV = Konstant
is o
a di
b a ti s
ch
p2
p3
Volumen V2
γ
pV = Konstant (for γ = 1.667)
Thermische Prozesse des idealen Gases
p1V1
V1
Vergleich der isothermen und adiabatischen Expansion des idealen
Druck
p1
Figur 5.
Gases.
Experiment: Adiabatische Expansion von Gasen
Gase werden in einem Volumen eingeschlossen und das Volumen
wird periodisch durch die Bewegung eines Kolbens verändert. Die
Temperatur T im Gas wird (mit einem Kupfer-Draht) gemessen.
Wir betrachten verschiedene Gase: Ar, Luft und SF6 (SchwefelHexafluorid).
CV
dV
dT
+ nR
=0
V
T
423
Die Kompression und die Expansion des Gases erfolgt adiabatisch.
Aus
Physik
424
Thermodynamik
folgt
dT
nR dV
dV
=−
= −(γ − 1)
T
CV V
V
Die Amplitude der periodischen Temperaturbewegung ist zu γ–1 des
Gases proportional.
Im Kap. 8.7 haben wir mit Hilfe des Gleichverteilungssatzes gefunden
dU
1
CV =
= nf R
2
dT
wobei f die Anzahl der Freiheitsgrade ist.
nR
2
=
1 f
nf R
2
Der γ-Koeffizient hängt von der Anzahl der Freiheitsgrade ab
nR
(γ − 1) = =
CV
Wir messen die folgenden Werte und vergleichen sie mit der Theorie.
Siehe Tabelle 2.
Ar
Gas
1/5≈0,2
2/3≈0,66
1
gemessen
(γ−1)/(γ−1)Ar
21/2R
5/2R
3/2R
Theorie
CV
23/2R
7/2R
5/2R
Theorie
CP=CV+R
1,1
1,40
1,67
Theorie
γ
0,2
0,6
1
Theorie
(γ−1)/(γ−1)Ar
und vorausgesagte Werte der Grösse γ–1.
Luft
TABLE 2. Gemessene
SF6
Wir diskutieren diese Werte.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
W rmemaschine
1.
2.
23
c p = cV + R ≈ R
2
⇒
γ − 1 ≈ 0, 2
Luft: der gemessene Wert ist kompatibel mit f=5. Das Molekül
schwingt nicht. Bei Zimmertemperatur sind die Freiheitsgrade der
Schwingung praktisch eingefroren, wie beim H2-Molekül.
Siehe Kap. 8.8.1 Abb. 10.
Schwfel-Hexafluorid (SF6): Ein Molekül mit 7 Atomen besitzt im
Prinzip (in der klassischen Beschreibung) f=3×7=21 Freiheitsgrade.
21
cV ≈ R
2
23
c p > R
2
⇒
γ − 1 <≈ 0,1
In Wirklichkeit haben wir gesehen, dass Schwingungsbewegungen
zwei Freiheitsgrade besitzen (Siehe Kap. 8.8.1) und deshalb sollen
wir sagen
21
cV > R
2
Wir schliessen daraus, dass die Schwingungen des SchwefelHexafluorid-Moleküls bei Zimmertemperatur teilweise eingefroren sind.
9.5 Wärmemaschine
isotherm
V
= −W isotherm = nRT ln 2
V1
425
Mit der Methode der isothermen Expansion (Siehe Kap. 9.4.2) des
Gases wird Wärme in mechanische Arbeit umgewandelt.
Q
wobei V1 das Anfangs- und V2 das Endvolumen des Gases ist.
Physik
426
Thermodynamik
Beispiel: die Wärmemaschine von Stirling
W rmemaschine
Kalt
Kalt
Schwungrad
Kolben A
Kolben V
Heiss
Heiss
Heiss
Illustration des Zykluses der Wärmemaschine von Stirling.
Heiss
Figur 7.
3. R. Stirling (1790-1878). Er hat seine Maschine erfunden, wenn er 26 Jahre alt war.
Physik
427
Dadurch wird die Luft periodisch zwischen dem “heissen” (TW) und
dem “kalten” (TK) Teil der Maschine verschoben.
Der Kolben V ist um eine Phasendifferenz von 90° gegenüber dem
Kolben A verschoben.
Zwei Kolben (der Verdrängerkolben V und der Arbeitskolben A) wird
vom Schwungrad S bewegt. Siehe Abb. 7.
Das Arbeitsgas der Maschine ist Luft. Die Maschine operiert zwischen zwei Temperaturen.
Stirling3 hat um 1816 eine periodische Maschine erfunden und
gebaut.
Eine Maschine, die Wärme in mechanische Arbeit umwandelt, heisst
eine Wärmemaschine.
In einer periodischen Wärmemaschine wird ein Zyklus durchgeführt und die Maschine operiert periodisch. Am Ende des Zykluses
befindet sich die Maschine wieder im Ursprungszustand.
Jede Maschine entählt eine Subtanz (das Arbeitsgas).
In einer Wärmemaschine nimmt diese Substanz bei der höheren Temperatur TW die Wärme QW auf, verrichtet eine Arbeit
W und gibt bei der tieferen Temperatur TK die Wärme QK ab.
Eine Wärmepumpe ist eine Wärmemaschine mit umgekehrter
Arbeitsrichtung: die Substanz nimmt bei der tieferen Temperatur TK eine Wärme QK auf, und gibt unter Ausnutzung der
Arbeit W die Wärme QW an das wärmere Reservoir der Temperatur TW ab.
Siehe Abb. 6.
Wärmepumpe
W
Wärmemaschine
QK
QW
Wärmereservoir
TW
W
Wärmereservoir
TW
QW
Wärmereservoir
TK
Prinzip der Wärmemaschine und Wärmepumpe. Es gilt TW > TK.
Wärmereservoir
TK
QK
Figur 6.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
428
Thermodynamik
In der Praxis können das kalte Wärmereservoir Kühlwasser und das
heisse Wärmereservoir die Flamme eines Bunsenbrenners sein.
Wir messen die Temperatur im unteren Teil des Gasbehälters. Sie
beträgt ca. 400°C. Das Kühlwasser hat eine Temperatur von ca. 20°C.
Bewegen wir das Schwungrad S im Gegenuhrzeigersinn, dann läuft
die Maschine nicht.
Die Entropie
Wir halten nun die Maschine an und bewegen das Schwungrad mittels einem Griff. Wir leisten Arbeit von aussen und die Maschine wird
als Wärmepumpe betrieben: sie entnimmt Wärme aus dem kälteren
Reservoir, um sie an das wärmere abzugeben.
9.6 Die Entropie
Physik
429
Ein Mol Helium enthält genug Energie, um ein Kilogramm auf eine
Höhe von ≈360 m zu heben.
3
≈ × (8 J / mol / K ) × 1mol × ( 300K )
2
≈ 3600 J
ganze thermische Energie
3 3
von 1 Mol He - Gas bei ≈ N A kT = RT
2 2
Zimmertemperatur
Jedoch ist die thermische Energie einer relativ grossen Menge von
Stoff nicht vernachlässigbar. Wir stellen uns z.B. vor, dass wir die
ganze thermische Energie aus 1 Mol Helium-Gas herausziehen könnten.
Im letzten Kapitel haben wir die thermische Energie von Atomen und
Molekülen behandelt.
Heiss
Bewegen wir das Schwungrad S im Uhrzeigersinn, dann beginnt die
Maschine frei zu laufen. Die Laufgeschwindigkeit wird schliesslich
durch Reibungsverluste begrenzt.
Kalt
Die thermische Energie der einzelnen Atome oder Moleküle ist nicht
sehr gross (einer Temperatur von T=0°C entspricht z.B. eine Energie
kT=3,77×10–21J pro Freiheitsgrad). Siehe Kap. 8.4.1.
Kalt
Kalt
Die Stirling-Maschine kann auch umgekehrt laufen.
Heiss
Natürlich kann die Stirling-Maschine auch “umgekehrt” laufen. Wir
ersetzen die Flamme durch flüssigen Stickstoff mit einer Temperatur
von ca. –190°C. Siehe Abb. 8.
Figur 8.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
430
Thermodynamik
Gleichfalls können wir z.B. die gespeicherte Energie in Wasser
bestimmen. Bei Zimmertemperatur ist die Wärmekapazität von Wasser ungefähr 75 J/mol/K (Siehe Kap. 8.5.3).
Ein Mol Wasser enthält 18 g. Ein Kilogramm oder ein Liter Wasser
entspricht ungefähr 55 Mol.
Ein Schwimmbad der Länge 25m, der Breite 10m und der Tiefe 2m
hat ein Volumen von 500 m3 oder 500’000 Liter. Die Wärmekapazität
des Schwimmbads ist deshalb gleich
9
Die Entropie
Carnot hat gefunden, dass es eine (theoretische)
Wärmemaschine gibt, deren Wirkungsgrad nur von der Temperatur der Wärmereservoirs abhängt und dass dieser Wirkungsgrad für gegebene Temperaturen der maximal mögliche
ist.
Um diesen Satz zu beweisen, hat Carnot eine idealisierte
Wärmemaschine erfunden: die Carnotsche Wärmemaschine.
Diese Maschine ist eine idealisierte Anordnung, bei der die isotherme
und die adiabatische Expansion und Kompression eines idealen
Gases benutzt werden.
5
(5 × 10 l) × (55mol / l) × (75J / mol / K ) = 2 × 10 J / K
Der Zyklus der Maschine (der Carnotsche Kreisprozess) wird mit
Hilfe eines reibungsfrei beweglichen Kolbens durchgeführt.
p1V1T1
i s ot h
er m
a di
ab
xp
.E
i
s
o
Ko therm nsio
mp
n
ress e
io n
ion
ns
io n
xpa
ress
e E
omp
adiab. K
p4V4T3
p2V2T1
oder 1 Giga-Joule pro Kelvin! Kann man diese grosse Menge thermischer Energie dem Schwimmbad entziehen?
Druck
p1
p2
p
4
p3
V4 V2
V3
Volumen
a
Das pV-Diagramm des Carnotschen Kreisprozesses.
V1
p3V3T3
Das pV-Diagramm des Prozesses ist in Abb. 9 gezeigt.
Figur 9.
Physik
431
Wenn es so viel thermische Energie in unserer Umgebung gibt,
warum brauchen wir Kohle- oder Kernkraftwerke?
Warum können nicht Schiffe die thermische Energie von Seen nutzen, um sich zu bewegen?
Die Antworten können mit Hilfe des Konzeptes der Entropie gefunden werden.
9.6.1 Der Carnotsche Kreisprozess
Im Jahr 1824 hat Carnot4 Ideen zum Konzept der Entropie entwikkelt. Carnot wollte den Wirkungsgrad von Wärmemaschinen verbessern.
4. S. Carnot (1796-1832).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
432
Thermodynamik
Schritt 3: Das Gas wird auf das kältere Wärmereservoir (T3<T1)
mit der Temperatur T3 gestellt und auf das Volumen V4 komprimiert. Dabei gibt es die Wärme QK an das Reservoir ab (QK<0).
Schritt 2: Das Gas wird abiabatisch weiter expandiert, bis es den
Zustand p3,V3,T3 erreicht hat. Da keine Wärme ausgetauscht wird,
fällt die Temperatur auf T3.
Schritt 1: Das Gas befindet sich zu Anfang in einem Gleichgewichtszustand, der durch p1,V1,T1 charakterisiert ist. Das Gas
expandiert isotherm (und langsam) in den Zustand p2,V2,T1. Um
seine Temperatur konstant zu halten, muss das Gas eine Wärme
QW aus einem warmen Reservoir aufnehmen (QW>0).
Der Kreisprozess läuft so:
1.
2.
3.
4.
Schritt 4: Das Gas wird adiabatisch auf sein Anfangsvolumen V1
komprimiert. Die Temperatur steigt auf T1.
In einem Zyklus kehrt die Maschine zum Anfangszustand p1,V1,T1
zurück. Es folgt, dass die innere Energie U zu Beginn und am Ende
des Zykluses denselben Wert hat.
Aus der Energieerhaltung folgt
∆U = U E − U A = 0 = Q + W = QK + QW + W
Weil die geleistete Arbeit gleich
W = − ∫ pdV
Die Entropie
negativen Wert (W<0). Ein negativer Wert entspricht einer vom Gas
an seiner Umgebung geleisteten Arbeit, d.h. die Wärmemaschine leistet Arbeit an ihrer Umgebung.
⇒
W = QW − QK
Aus der Energieerhaltung folgt, dass der Betrag der geleisteten Arbeit
gleich dem Betrag der aufgenommenen Wärme QW minus der Betrag
der abgegebenen Wärme QK ist
−W = QK + QW
wobei wir die folgenden Ergebnisse benutzt haben:
1) QW>0 (die Wärme wird vom warmen Reservoir abgeben und wird
vom Gas aufgenommen).
2) QK<0 (die Wärme wird vom Gas an das kalte Reservoir abgegeben).
Wir bemerken, dass die Maschine von Carnot, wie alle anderen
Maschinen, die wir kennen, immer Wärme von einem warmen Reservoir aufnimmt, mechanische Arbeit leistet, und Wärme an die kältere
Umgebung abgibt.
Q −Q
Q
W
K
= W
= 1− K
QW
QW
QW
Der Wirkungsgrad einer Wärmemaschine ist definiert als Verhältnis der geleisteten Arbeit und der zugeführten Wärme
ε=
Er gibt an, wieviel Wärme QW vom warmen Reservoir aufgenommen
werden muss, um die mechanische Arbeit W zu leisten.
Wie erwartet ist der Wirkungsgrad einer Wärmemaschine, die die
ganze Wärme QW in mechanische Arbeit W umwandelt, d.h. W=QW
und QK=0, gleich 100%.
ist, ist der Betrag der Nettoarbeit während des Kreisprozesses gleich
der Fläche innerhalb der Kurvenzüge.
Wir bemerken, dass die Arbeit mit einem negativen Vorzeichen definiert wurde (siehe Kap. 9.2), deshalb besitzt die Nettoarbeit einen
Physik
433
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
434
Thermodynamik
QK
W
In einer ähnlichen Weise ist die Leistungzahl einer Wärmepumpe
definiert als Verhältnis der vom kalten Reservoir entnommenen (und
an das warme Reservoir abgegebenen) Wärme und der mechanischen
Arbeit, die dem Gas zugeführt werden muss.
cL =
QK
Der Vorteil des Kreisprozesses von Carnot mit einem idealen Gas ist,
und
bestimmen können.
dass wir die Wärme
QH
Während der isothermen Expansion (Schritt 1) ist die aufgenommene
Wärme gleich der geleisteten Arbeit (siehe Kap. 9.4.2)
QW = nRT1 ln(V2 / V1 )
3
4
3
Q = nRT ln(V / V )
Während der isothermen Kompression (Schritt 4) ist die abgegebene
Wärme gleich
K
(Bemerke, dass V3 > V4, so dass QK < 0)
Das Verhältnis der Gleichungen gibt
QW T1 ln(V2 / V1 )
=
QK T3 ln(V4 / V3 )
Nun müssen wir das Verhältnis der Volumina während der adiabatischen Expansion und Kompression bestimmen.
und
p4V4γ = p1V1γ
Wir bemerken, dass für den adiabatischen Prozess gilt
p2V2γ = p3V3γ
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Entropie
p3 = RT3 / V3 ;
p4 = RT3 / V4
Schliesslich benutzen wir die Zustandsgleichung des idealen Gases
pV=nRT
p2 = RT1 / V2 ;
γ −1
⇒ TV
= T3V3γ −1
1 2
γ −1
= T3V4γ −1
TV
1 1
RT1 γ RT3 γ
V
V =
V3 3
V2 2
p1 = RT1 / V1;
und erhalten
und
γ −1
V
= 3
V4
γ −1
⇒
V2 V3
=
V1 V4
Wenn wir beide Gleichungen durcheinander dividieren, folgt
V2
V1
Mit diesem Ergebnis ist das Verhältnis einfach gleich
QW T1 ln(V2 / V1 ) T1
=
=
QK T3 ln(V4 / V3 ) T3
Q
W
T
= 1− K = 1− 3
QW
QW
T1
Der Wirkungsgrad der Wärmemaschine von Carnot ist dann
gleich
εCarnot =
435
Der Wirkungsgrad der idealisierten Wärmemaschine von Carnot
hängt nur von den Temperaturen der Wärmereservoirs ab! Da T3<T1
folgt, dass der Wirkungsgrad immer kleiner als 100% ist.
Physik
436
Thermodynamik
9.6.2 Wärmemaschine mit maximalem Wirkungsgrad
Carnot entwickelte das Konzept einer reversiblen Wärmemaschine.
Er wollte die folgende Frage beantworten: wie gross ist der maximale
Wirkungsgrad einer Wärmemaschine?
Er stellte das folgende Theorem auf
Der Wirkungsgrad aller zwischen zwei Temperaturen reversibel arbeitenden Wärmemaschinen ist gleich gross, und alle
irreversiblen Wärmemaschinen haben einen kleineren Wirkungsgrad.
nicht-reversibler
Reversible und nicht reversible Prozesse. Ein
Prozess ist ein Prozess, der nicht in umgekehrter Richtung ablaufen
kann, wie z.B.
1.
2.
3.
Das Schmelzen von Eis in Wasser. Ein Stück Eis wird in einer
Tasse mit Wasser eingetauscht. Das Eis schmilzt. Die Temperatur
des Wassers in der Tasse steigt. Der Prozess ist irreversibel. Es gibt
nur eine Richtung für den Vorgang. Man beobachtet nie, dass das
Wasser sich spontan abkühlt, um sich in Eis umzuwandeln. Der
Prozess ist vom Energieerhaltungsstandpunkt in beide Richtungen
erlaubt, wird aber nur in eine Richtung beobachtet.
Wärmeleitung. Werden zwei gleiche Körper verschiedener Temperatur miteinander in Berührung gebracht, nehmen sie beide nach
einer gewissen Zeit die gleiche Zwischentemperatur an. Der Prozess ist irreversibel. Man beobachtet nie, dass einer der Körper
sich spontan abkühlt und der andere sich erwärmt, obwohl der Prozess vom Energieerhaltungsstandpunkt erlaubt ist.
Freie Expansion eines Gases. Ein kleiner Behälter, der ein Gas
(oder ein Parfum) enthält, wird geöffnet. Das Gas (das Parfum)
expandiert im ganzen Zimmer. Der Prozess ist irreversibel. Man
beobachtet nie, dass sich das Gas (das Parfum) nach einer gewissen Zeit spontan wieder im Behälter befindet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Entropie
Im Allgemeinen sind Prozesse, bei denen mechanische Energie aufgrund von Reibung (oder anderen dissipativen Effekten wie z.B. viskose Kräfte, usw.) in Wärme umgewandelt wird, nicht reversibel.
Reversible Prozesse müssen quasistatisch ablaufen, d.h., das System
muss sich immer im Gleichgewichtszustand befinden. Prozesse wie
Explosionen sind nicht reversibel.
Wärmemaschine. Die idealisierte Maschine von Carnot läuft reversibel. Reale Maschinen laufen irreversibel.
T3
T1
Aus dem Theorem von Carnot folgt, dass eine reale Wärmemaschine
nie einen höheren Wirkungsgrad als die Maschine von Carnot erreichen kann:
ε reell ( irreversibel ) < εCarnot = 1 −
Wäre der Wirkungsgrad einer Maschine gleich 100%, würde Wärme
vom warmen Reservoir komplett in Arbeit umgewandelt. Das Theorem von Carnot sagt, dass eine solche Maschine nicht existieren kann.
T1 → ∞
⇔
T3 → 0
Der Wirkungsgrad einer (idealen, reversiblen) Wärmemaschine von
Carnot erreicht 100% nur wenn T3 nach Null oder T1 nach unendlich
geht
ε irreversibel < εCarnot → 1
437
und deshalb kann ein Wirkungsgrad von 100% nicht erreicht werden.
Thomson und Planck haben das so formuliert: es ist unmöglich, eine
periodisch arbeitende Maschine zu bauen, die nichts anderes
bewirkt, als durch Abkühlung eines Wärmereservoirs Wärme in
mechanische Arbeit umzuwandeln.
Physik
438
Thermodynamik
Ein zweites kälteres Wärmereservoir wird immer gebraucht und der
Wirkungsgrad einer Wärmemaschine hängt von den Temperaturen
beider Wärmereservoirs ab.
9.6.3 Die Definition der Entropie
Wir haben gesehen, dass bestimmte thermodynamische Prozesse irreversibel sind, d.h. sie laufen nur in einer Richtung ab.
Mathematisch wird eine neue Zustandsfunktion, die Entropie S,
eingeführt. Wie die innere Energie U ist die Entropie S eine Zustandsfunktion, die vom Zustand des Körpers abhängt. Sie wird durch den
Druck, das Volumen, die Temperatur, usw... des Körpers charakterisiert:
S = S ( p,V , T ,...)
Wir unterscheiden die Entropie des Systems S und die seiner Umgebung SU
Die Entropie
wobei T die Temperatur und dQ die ausgetauschte Wärme ist.
Einheit: ¨Entropie [S] = J/K
Um die Änderung der Entropie bei einer Zustandsänderung von
einem Zustand A zum Zustand E zu bestimmen, muss man die infinitesimalen Änderungen integrieren.
Wie schon erwähnt ist die Entropie S, wie die innere Energie U, eine
Zustandsfunktion. Ihre Änderung hängt nur von Anfangs- und Endzustand ab
∆S = SE − SA
Da die infinitesimale Änderung der Entropie dS von der Temperatur T
abhängt, muss sich in jedem Punkt der Integration das System im
Gleichgewichtszustand befinden, da sonst keine Temperatur des Körpers definiert werden kann.
Zusätzlich hängt die ausgetauschte Wärme dQ vom Weg vom
Zustand A zum Zustand E ab! Aus diesem Grunde müssen wir einen
bestimmten Weg von A bis E wählen, um dS=dQ/T zu integrieren.
4
1
1
Q
Q
W
− K = 0 ⇒ ∫ dQ + ∫ dQ = 0
T1
T3
T1 1
T3 3
2
S ≡ Entropie des Systems
SU ≡ Entropie der Umgebung
⇒
Wir betrachten den Kreisprozess von Carnot. Wir haben gesehen,
dass für eine solche Maschine gilt (siehe Kap. 9.6.1)
QW T1
=
QK T3
Beachte, QK wird so definiert, dass QK <0.
Physik
439
Wie im Fall der inneren Energie U interessiert uns die Änderung der
Entropie
∆S = Änderung der Entropie des Systems
∆SU = Änderung der Entropie der Umgebung
dQ
T
Eine infinitesimale Änderung der Entropie wird definiert als
dS =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
440
Thermodynamik
2
Wir erhalten,
4
1
1
dQ + ∫ dQ = 0 ⇒
T1 ∫1
T3 3
2
1
∫
4
dQ
dQ
+
=0 ⇒
T ∫3 T
∫
reversibel
dQ
=0
T
Die gesamte Entropie (System und Umgebung) kann nie
abnehmen
Die Entropie
2.
∆( S + SU ) ≥ 0
dQ = CV dT + nRT
dV
V
Bei reversiblen Prozessen bleibt die gesamte Entropie (d.h. System
und Umgebung) konstant. Bei nicht-reversiblen Prozessen nimmt
sie zu!
dQ
T
E
d.h. die Änderung der Entropie über einen geschlossenen reversiblen
Weg ist gleich Null.
E
A
=∫
E
Wir betrachten z.B. die Entropie eines idealen Gases. Wir wissen,
dass für ein ideales Gas gilt (Siehe Kap. 9.4.3)
E
∫A2dS
1
3
über reversibeln Weg
Es folgt
V
T
dV
dQ
dT
= ∫ CV
+ nR
= CV ln E + nR ln E
VA
TA
V
T
T
A
VE
VA
Bei (reversibler) isothermer Expansion ist die Entropieänderung des
idealen Gases gleich (TE=TA)
A
∆S = ∫
Aus diesem Grund wird die gesamte Änderung der Entropie durch
Integration über einen reversiblen Weg gewonnen
∆S = SE − SA =
Über nicht-reversible Wege kann sich die Entropie ändern, auch wenn
keine Wärme ausgetaucht wird, d.h. dQ=0! Die Entropieänderung
hängt aber nur vom Anfangs- und Endzustand ab. Um diese Änderung zu berechnen, müssen wir zuerst einen reversiblen Prozess finden, der denselben Anfangs- und Endzustand verbindet, dann über
diesen Weg die ausgetauschte Wärme bestimmen, um die obige Gleichung zu verwenden.
∆S = nR ln
Für eine isotherme Expansion sind die vom Gas geleistete Arbeit und
die zugeführte Wärme Q einander gleich (Siehe Kap. 9.4.2)
9.6.4 Eigenschaften der Entropie
Die Entropie S ist eine Zustandsfunktion, die vom Zustand des Körpers abhängt.
V
Q = −W = nRT ln E
VA
Die Entropie des Systems oder der Umgebung kann während eines
thermodynamischen Prozesses zu- oder abnehmen.
Physik
441
Die zugeführte Wärme kommt von einem Wärmereservoir (d.h. von
der Umgebung des Gases) und wird benutzt, um die Temperatur des
Gases während der Expansion konstant zu halten.
Die fundamentalen Eigenschaften der Entropie sind die folgenden:
1.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
442
Thermodynamik
⇒
∆S + ∆SU = 0
Weil vom Umgebungszustand die Wärme Q entzogen wird, erhalten
wir
∆S = Q / T
∆SU = −Q / T
Wie erwartet ist bei reversiblen Prozessen die gesamte Entropie des
Gases und seiner Umgebung konstant.
Entwertung der Energie. Wenn wir als System und seine Umgebund das ganze Universum betrachten, dann sagen die Eigenschaften
der Entropie, dass
bei irreversiblen Prozessen die Entropie des Universums
zunimmt.
In solchen Prozessen wird eine Wärmemenge
dQ = ∆( S + SU )T
“entwertet”, weil diese Wärme einer Form von Energie entspricht, die
nie mehr in mechanische Arbeit umgewandelt werden kann.
Man kann sagen, dass die Entropie eine Richtung für die Zeit definiert. Das Universum entwickelt sich in diese Richtung. Nicht-reversible Prozesse geschehen und sie ändern das Universum in einer
Weise, die nicht “ungeschehen gemacht” werden kann.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 10
Drehbewegung
10.1 Der Drehimpuls
Bei der Behandlung der Bewegung eines Teilchens haben wir den
Impuls eines Teilchens definiert (Siehe Kap. 2.2). Diese Grösse war
sehr hilfreich, wegen der Erhaltung des Gesamtimpulses (Siehe
Kap. 2.3).
Der Erhaltungssatz kann im Fall einer Drehbewegung (oder Rotation)
umformuliert werden. Man spricht von der Erhaltung des gesamten
Drehimpulses.
10.1.1 Definition des Drehimpulses
r r r
r r
L ≡ r × p ≡ m( r × v )
443
Der Drehimpuls bezüglich einem bestimmten Punkt O wird durch
das Vektorprodukt des Ortsvektors r und des (linearen) Impulses p,
d.h.
Physik
444
Drehbewegung
definiert, wobei m die Masse des Teilchens ist, und
r
r = Ortsvektor bezüglich O
r
r
p = mv = Implusvektor
Siehe Abb. 1.
L
O (Ursprung)
r
θ
Ebene
der Bewegung
p
Bahn
Figur 1. Definition des Drehimpulses. Der Drehimpulsvektor ist senkrecht
zur Ebene, die durch den Ortsvektor und den Impulsvektor definiert ist.
Der Drehimpuls ist ein Vektor, dessen Richtung durch die RechteHand-Regel für ein Vektorprodukt eindeutig bestimmt ist.
Siehe Abb. 2.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
p
r
p
Die Rechte-Hand-Regel für das Vektorprodukt.
r
p
Der Drehimpuls
r
Figur 2.
p
r
Der Drehimpuls ist senkrecht zur Ebene, die durch den Ortsvektor
und den Impuls definiert ist. Er ist senkrecht zur Bewegungsrichtung
der Masse.
Der Betrag des Drehimpulses ist gleich
r r r
L = r p sin θ
wobei θ der von r und p eingeschlossene Winkel ist. Der Betrag kann
auch in den folgenden Formen ausgedrückt werden
L = ( r sin θ ) p = r⊥ p
L = r( p sin θ ) = rp⊥
wobei rsinθ die Komponente von r senkrecht zur Wirkungslinie des
Impulses p ist, und psinθ ist die Impulskomponente senkrecht zu r.
445
Wenn der vom Ortsvektor und dem Impuls eingeschlossene Winkel θ
gleich 0° oder 180° ist, ergibt sich keine zu r senkrechte Impulskom-
Physik
446
Drehbewegung
Der Drehimpuls
Physik
kgm 2
s2
447
Das Drehmoment ist das Produkt aus der Kraft mg und dem Kraftarm
b. Nach der Rechte-Hand-Regel geht das Drehmoment senkrecht in
die Zeichenebene hinein.
wobei b der Kraftarm ist (siehe Abb. 3).
M = rF sin θ = ( r sin θ ) F = bmg = Konst.
Der Betrag des Drehmomentes ist gleich
Die Masse spürt ein Drehmoment M und besitzt einen Drehimpuls L
um eine Drehachse durch O.
Siehe Abb. 3.
Wir betrachten eine Masse m, die wegen der Erdbeschleunigung g
senkrecht nach unten fällt. Zur Zeit t=0 wird die Masse aus dem
Ruhezustand (mit einer Anfangsgeschwindigkeit v=0) losgelassen.
Beispiel 1: fallende Masse
Aus der Definition folgt der Drehimpulssatz (für m=Konst.): die
zeitliche Änderung des Drehimpulses eines Teilchens ist gleich dem
angreifenden Drehmoment, d.h.
r
r
dL r dp r r r
=r×
=r×F= M
dt
dt
[ M ] = [r][F ] = Nm =
Einheit: im MKSA-System
kg.m kg.m 2
=
s
s
ponente, und auch keine zur Wirkungslinie des Impulses senkrechte
Komponente von r. Der Drehimpuls verschwindet in diesem Fall.
Einheit: im MKS-System:
[ L] = m.
10.1.2 Erhaltung des Drehimpulses
=0 weil v // v
Wir betrachten nun die zeitliche Ableitung des Drehimpulses
r
r
r
r
r r dr r r dp
r
r r dp
dL
= ( r × p) = × p + r × = (v × mv ) + r ×
424
3
dt
dt
dt 1
dt
r r
Es folgt, dass die zeitliche Änderung des Drehimpulses gleich dem
Vektorprodukt des Ortsvektor und der zeitlichen Änderung des
(linearen) Impulses p ist:
r
r
dL r dp
=r×
dt
dt
Aus dem zweiten Newtonschen Gesetz kennen wir die Beziehung
zwischen der Kraft und dem (linearen) Impuls, nämlich
r
r
r
r r
dv
dp d ( mv )
=
={ m
= ma = F
dt
dt
dt m = Konst
.
wobei wir angenommen haben, dass die Masse des Teilchens konstant ist.
Das Drehmoment der Kraft F bezüglich r wird so definiert
r r r
M≡r×F
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
448
Drehbewegung
Der Betrag des Drehimpulses ist gleich
L = rp sin θ = ( r sin θ ) mv ( t) = bmv ( t) = bmgt
b
Drehmoment
r
M=r×mg
Drehachse
θ
Drehimpuls
dL
= M = r × mg
dt
F
wobei v(t)=gt die Geschwindigkeit der Masse als Funktion der Zeit
ist.
Kraft
F=mg
linearer Impuls
dp
= F = mg
dt
Figur 3. Eine Masse m fällt senkrecht nach unten. Ein Drehmoment wirkt
um eine Drehachse durch O. Der Drehmomentvektor geht senkrecht in die
Zeichenebene hinein.
Drehmoment und Drehimpuls sind hier parallele Vektoren. Die zeitliche Änderung des Drehimpulses wirkt somit nur auf den Betrag und
nicht auf die Richtung.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Drehimpuls
⇔
d
(bmgt) = bmg
dt
ok!
Wir können die folgende Bezeihung in Skalarform überprüfen
?
dL }
= M
dt
d
(mv ) = mg ⇒
dt
dp
=F
dt
Wir setzen in die Gleichung die Geschwindigkeit v für gt ein und
erhalten
d
(bmv ) = bmg ⇒
dt
Wie erwartet, stellt die Beziehung M=dL/dt der Drehbewegung keinen grundsätzlich neuen Satz der Physik dar, sondern ist nur eine
Umformulierung der Newtonschen Gesetze für die Drehbewegung.
Beispiel 2: zentrale Kraft
Die Gravitationskraft ist z.B. eine zentrale Kraft, weil sie die folgende Form besitzt
r
r r
r r
F (r ) = f ( r )
r
d.h., sie wirkt immer längs die Linie zwischen den zwei Körpern.
r r r r r rr f ( rr ) r r
M = r × F = r × f (r ) =
(r × r ) = 0
r
r
449
Wenn wir z.B. die Bewegung eines Planeten um die Sonne betrachten, ist das auf den Planet ausgeübte Drehmoment bezüglich der
Sonne gleich (wir stellen die Sonne in den Ursprung des Koordinatensystems)
Physik
450
Drehbewegung
Bezüglich O übt die Gravitationskraft kein Drehmoment auf den Planet aus. Es folgt, dass der Drehimpuls des Planeten bezüglich der
Sonne konstant ist
r
r
r
dL
= M = 0 ⇒ L = Konst.
dt
10.2 Die Bewegung starrer Körper
Ein spezieller und wichtiger Fall ist die Bewegung starrer Körper.
Ein starrer Körper wird definiert als ein Körper, bei dem die
Änderung der Abstände zwischen allen seinen Atomen oder
Molekülen bei Anwendung einer Kraft oder eines Drehmoments vernachlässigt wird.
Ein starrer Körper behält seine Gestalt, wenn er sich bewegt.
Wir unterscheiden zwischen zwei Arten von Bewegungen:
1.
2.
Translationsbewegung: alle Teilchen (Atome oder Moleküle) des
Körpers beschreiben parallele Bahnen;
Drehbewegung: alle Teilchen beschreiben kreisförmige Bahnen
um eine Gerade, die man als Drehachse (oder Rotationsachse)
bezeichnet. Die Achse kann fixiert sein oder ihre Richtung während der Bewegung relativ zum Körper verändern.
Die allgemeine Bewegung eines starren Körpers kann immer als
Kombination einer Translations- und einer Rotationsbewegung
betrachtet werden.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.1 Die Winkelgeschwindigkeit
Wir wollen nun einen starren Körper betrachten, der sich um die ∆Achse dreht (Siehe Abb. 4).
dθ ( t )
dt
Die Rotation des Körpers um die Drehachse kann mit Hilfe eines
Drehwinkels θ beschrieben werden. Die Winkelgeschwindigkeit
wird als die zeitliche Ableitung der Winkelfunktion θ(t) definiert
ω ( t) ≡
θ(t)
∆
Siehe Kap. 6.3.1. Die Winkelgeschwindigkeit kann als Vektorgrösse
definiert werden, deren Richtung parallel zur Drehachse und senkrecht zur Ebene der Rotation ist. Die Richtung des Vektors ist durch
die Rechte-Hand-Regel gegeben.
ω
451
Figur 4. Die Winkelgeschwindigkeit kann als Vektorgrösse definiert werden.
Seine Richtung ist zur Drehachse parallel und durch die Rechte-HandRegel gegeben.
Physik
452
Drehbewegung
r r
r
⇒ v i = ω ri sin γ
r r r
⇒ v i = ω × ri
1424
3
Beziehung für die
Vektorgrösse
Wenn der starrer Körper sich mit der Winkelgeschwindigkeit ω um
die Drehachse dreht, ist die Geschwindigkeit jedes seiner Teilchen
gleich
v i = ωr∆,i
1
424
3
Beziehung für die
Beträge
∆
vi
wobei r∆,i der Abstand des Teilchens von der Drehache ist.
Siehe Abb. 5.
v i = ω × ri
ω
γ r
i
O (Ursprung)
Figur 5. Beziehung zwischen dem Winkelgeschwindigkeitsvektor und der
(linearen) Geschwindigkeit der Teilchen (Atome oder Moleküle) i des
drehenden Körpers.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.2 Gesamte Energie eines starren Körpers
Nun werden wir uns mit der Translation und Rotation eines starren
Körpers beschäftigen.
r
ri =
mi
Ortsvektor
des Schwerpunkts
r
r{
SP
+
ri,SP
SP
Ortsvektor des Teilchens i
bezüglich des Schwerpunkts
r
ri,SP
{
Der Ortsvektor des Teilchens i des starren Körpers wird geschrieben
als
Siehe Abb. 6.
ri
r SP
Figur 6. Der Ortsvektor des Teilchens i wird bezüglich des Ortsvektors des
Schwerpunkts geschrieben.
453
Wenn ein starrer Körper sich bewegt, kann seine Bewegung aufgeteilt werden in eine Translation des Schwerpunkts und eine Rotation um den Schwerpunkt. Siehe Abb. 7.
Physik
454
Drehbewegung
Bahnkurve
des Schwerpunkts
SP
Rotation um
den Schwerpunkt
mi
ri,SP
SP
SP
Figur 7. Die Bewegung des starren Körpers wird in eine Translation des
Schwerpunkts und eine Rotation um den Schwerpunkt aufgeteilt.
In Kap. 7.1.7 haben wir gesehen, dass die gesamte kinetische Energie
eines Teilchensystems die Summe von zwei Termen ist: die kinetische
Energie des Schwerpunkts und die kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt.
E kin
kinetische Energie der einzelnen
Teilchen relativ zum Schwerpunkt
r
r 2
1 r
1
= ∑ miv i2 = ∑ mi (v SP + v i,SP )
2
i =1, N 2
i =1, N
r 2
r 2
1
1
M (v SP ) +
∑ m (v )
2 424
2 =1,N i i,SP
1
3
1i 4
42443
=
kinetische Energie
des Schwerpunkts
bezüglich SP
wobei die Geschwindigkeit eines Teilchens als die Summe der
Schwerpunktsgeschwindigkeit und der Geschwindigkeit des Teilchens relativ zum Schwerpunkt ausgedrückt wird
r r
r
v i = v SP + v i,SP
{
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
r r
r
⇒ v i = ω ri sin γ = ωr∆,i
Nun werden wir die Rotation um die Drehachse betrachten. Die
Drehachse geht durch den Schwerpunkt des starren Körpers.
Weil
r r r
v i = ω × ri
1
i
r
r
i
∑ 2 m (ω × r )
1
I ω2
2 ∆
i =1, N
2
=
i
∆, i
1
∑ 2 m (ωr )
i =1, N
2
1
= ∑ mi r∆,i 2 ω 2
2 i =1,N
wobei r∆,i der Abstand des Teilchens von der Drehache ist, folgt, dass
die kinetische Energie bezüglich des Schwerpunkts (d.h. die Rotationsenergie) gleich
Rot
E kin
=
≡
I∆ ≡
i ∆, i
∑mr
i =1, N
kg m2
2
Energie der Rotation
um den Schwerpunkt
455
ist. Dabei haben wir das Trägheitsmoment des Körpers I relativ
zur Rotationsachse ∆ definiert
Einheit: im MKS-System
E kin
kinetische Energie
des Schwerpunkts
r 2 1
r 2
1
= M (v SP ) + ∑ mi (v i,SP )
2
2
i =1, N
r 2
1
1
I ,SPω 2
= M (v SP ) +
2 4243
24∆2
1
1
4
3
Für die gesamte kinetische Energie des starren Körpers gilt
Physik
456
Drehbewegung
+
E pot ,externe
14
24
3
Potentielle Energie
wie wenn die Gesamtmasse
im SP konzentriert wäre
+ E pot, interne
Die Gesamtenergie ist die Summe der kinetischen und potentiellen
Energien (Siehe Kap. 7.1.8)
E = E kin + E pot
Energie der Rotation
um den Schwerpunkt
r 2
1
1
= M (v SP ) +
I SPω 2
2 4243
24∆,2
1
1
4
3
kinetische Energie
des Schwerpunkts
Die externe potentielle Energie ist die gleiche, wie wenn die Gesamtmasse im Schwerpunkt konzentriert wäre.
Experiment:Verschiedene Gewichte auf Rotator
Wir betrachten einen Rotator mit zwei gleichen Massen m. Wir können den Abstand r zwischen den Massen und der Drehachse ändern.
Ein Ende einer masselossen Schnur wird um die Achse des Rotators
aufgewickelt, und am anderen Ende der Schnur wird eine Masse M
angehängt.
1
I ∆ω 2
22
1
3
Rotationsenergie der Massen m
Die gesamte Energie des Systems ist gleich
Energie der Masse M
1
E = Mv 2 + Mgh +
2 4
1
4244
3
wobei ω die Winkelgeschwindigkeit des Rotators (d.h. die Winkelgeschwindigkeit der Massen m um die Rotatorachse) ist, und v und h
sind die Geschwindigkeit und die Höhe der aufgehängten Masse.
Wenn die Masse M losgelassen wird (Anfangsbedingung: v=0, d.h.
ω=0), wird ihre potentielle Energie Mgh in kinetische Energie der
Masse M und die Rotationsenergie des Rotators umgewandelt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
i =1, N
i ∆, i
∑mr
2
= mr 2 + mr 2 = 2 mr 2
Das Trägheitsmoment des Rotators (d.h. der beiden Massen m) ist
gleich
I∆ ≡
Es nimmt mit dem Quadrat des Abstandes r zu.
Wenn sich beide Masse mit einer bestimmten Winkelgeschwindigkeit
ω um die Rotatorachse drehen, dann ist umso mehr Rotationsenergie
im Rotator gespeichert, je grösser der Abstand r von der Achse ist.
Es folgt, dass weniger Energie für die Translationsbewegung der
Masse M vorhanden ist. Die Masse M wird desto langsamer fallen, je
grösser der Abstand r zwischen beiden Massen und der Rotatorsachse
ist.
10.2.3 Berechnung des Trägheitsmoments
Ein starrer Körper besteht aus einer sehr grossen Zahl dicht gepackter
Teilchen.
Für eine solche kontinuierliche Massenverteilung wird das Trägheitsmoment mit einem Integral gewonnen
I ∆ = ∫ r 2 dm
wobei r der Abstand des Massenelements dm von der Drehachse ist.
457
Das Trägheitsmoment eines homogenen Ringes. Wir
betrachten
die Drehbeweung eines homogenen Ringes um eine Achse, die durch
seinen Mittelpunkt geht und senkrecht zur Ringebene liegt.
Physik
458
Drehbewegung
Beim Ring mit Radius R befindet sich die gesamte Masse beim konstanten Abstand R. Das Integral ist dann
I ∆ ( Ring) = ∫ r 2 dm = R 2 ∫ dm = MR 2
wobei M die gesamte Masse des Ringes ist.
Das Trägheitsmoment eines homogenen Zylinders. Wir betrachten das Trägheitsmoment eines homogenen Zylinders mit Gesamtmasse M und Radius r bezüglich der Zylinderachse.
dr
Berechnung des Trägheitsmoments eines Zylinders.
R
r
Wir unterteilen den Zylinder in eine Serie von konzentrischen Ringen
mit Radius r und Dicke dr. Siehe Abb. 8.
Figur 8.
Das Trägheitsmoment dI des Ringes mit Radius r ist gleich
2πrdr 2 Mr 3 dr
=
dI = r 2 dm = r 2 M
R2
πR 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Das Trägheitsmoment des Zylinders ist die Summe der Trägheitsmomente der einzelnen Ringe mit Radius r:
3
r=R
r = R r dr
I ∆ ( Zylinder) = ∫ dI = 2 M ∫
=
r=0
r=0 R2
2 M r=R 3
2 M R4 1
r dr = 2
= MR 2
R 4 2
R 2 ∫r = 0
=
Das Trägheitsmoment des Zylinders mit einem Radius r ist kleiner als
das eines Ringes mit demselben Radius, weil im Fall des Zylinders
sich auch Teilchen bei Radien r<R befinden, und diese Teilchen tragen weniger zur Rotationsenergie bei, als wenn sie sich beim Radius
r=R befinden würden.
Experiment: Schiefe Ebene.
h(t)
x(t)
SP
H
Verschiedene Zylinder der gleichen Masse M, aber mit verschiedenen
radialen Massenverteilungen (d.h. verschiedenen Trägheitsmomenten) werden auf einer schiefen Ebene losgelassen. Siehe Abb. 9.
vSP(t)
α
459
Figur 9. Schiefe Ebene. Die vom Zylinder überstrichene Strecke wird als
x(t) bezeichnet.
Physik
460
Drehbewegung
1
1
2
Mv SP
+ I ∆,SPω 2 + Mgh
2
2
Die gesamte Energie eines Zylinders ist gleich
E=
wobei vSP die (lineare) Geschwindigkeit seines Schwerpunkts und ω
seine Winkelgeschwindigkeit ist.
Die verschiedenen Zylinder werden von einer Höhe H losgelassen.
Wenn die Zylinder auf der schiefen Ebene rollen, beobachten wir,
dass sie nicht zur selben Zeit den Boden erreichen, d.h. die Zylinder
werden nicht gleich beschleunigt.
Auf der schiefen Ebene wird die potentielle Energie der Zylinder in
kinetische und Rotationsenergie umgewandelt.
Die Beschleunigung hängt vom Trägheitsmoment des Zylinders ab.
Je grösser das Trägheitsmoment des Zylinders ist, desto langsamer
wird er beschleunigt.
10.2.4 Rollende Körper
Wir betrachten die Bewegung eines Körpers, der wie im Fall der obigen schiefen Ebene auf einer Fläche rollt. In diesem Fall kann die
Winkelgeschwindigkeit des Körpers in Beziehung mit der Geschwindigkeit seines Schwerpunkts gesetzt werden.
= Rω
v SP
R
für einen rollenden Körper (ohne zu gleiten)
Rollbedingung: Wenn wir annehmen, dass der Körper sich ohne zu
gleiten bewegt, gilt
v SP
ω=
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
Siehe Abb. 10.
vSP
ω
R
Rω
Figur 10. Die Beziehung zwischen der linearen Geschwindigkeit des
Schwerpunkts und der Winkelgeschwindigkeit um den Schwerpunkt, wenn
der Körper sich ohne zu gleiten bewegt.
I 2
1
1
1
2
Mv SP
+ I ∆,SPω 2 = M + ∆,SP
v
2
2
2
R 2 SP
461
Die gesamte kinetische (lineare und Rotations-) Energie ist in diesem
Fall gleich
E kin =
Beispiel: Schiefe Ebene
I 2
1
E = E kin + Mgh = M + ∆,SP
v + Mgh
2
R 2 SP
Die gesamte Energie ist gleich
Physik
462
Drehbewegung
10.2.5 Drehimpuls eines starren Körpers
Die Bewegung starrer K rper
r
i
∑L
i =1, N
ω
R
Das Velorad wird als ein homogener Ring betrachtet.
Siehe Abb. 11.
Figur 11.
Physik
463
Wir stellen uns vor, dass das Velorad aus einer Ansammlung von Teilchen der Masse m besteht, die mit masselossen Stäben verbunden
sind. Das Velorad wird deshalb als ein homogener Ring betrachtet.
Wir beginnen mit der Rechnung des gesamten Drehimpulses eines
Velorads.
r
L=
Der Drehimpuls eines starren Körpers ist gleich dem Gesamtdrehimpuls der Teilchen des Körpers
Wenn wir diese Gleichung als Funktion der Zeit betrachten, erhalten
wir für eine schiefe Ebene (Siehe Abb. 9)
I 2
1
E = M + ∆,SP
v ( t) + Mg( H − x ( t)sin α ) = Konst.
2
R 2 SP
Wenn die gesamte Energie konstant ist, wird die zeitliche Ableitung
der gesamten Energie verschwinden:
I d 2
d
dE 1
= M + ∆,SP
(v ( t)) − Mg sin α x ( t)
dt
dt 2
R 2 dt SP
I
dv
1
= M + ∆,SP
2v ( t) SP − Mg sin αv SP ( t) = 0
dt
R 2 SP
2
I
⇒ M + ∆,SP
a − Mg sin α = 0
R 2 SP
Es folgt, dass die Beschleunigung des Schwerpunkts des rollenden
Körpers gleich
Mg sin α
< g sin α
aSP =
I
∆, SP
M + 2
R
ist. Wie erwartet nimmt die Beschleunigung des Körpers mit seinem
Trägheitsmoment ab und sie ist kleiner als gsinα.
Der Wert gsinα ist das Ergebnis, wenn wir die Rotationsenergie des
Körpers vernachlässigen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
464
Drehbewegung
Der Drehimpuls der einzelnen Teilchen der Masse m ist gleich
r
Li = mRv i = mR( Rω ) = ( mR 2 )ω
weil jedes Teilchen dieselbe Geschwindigkeit Rω und denselben
Radius R besitzt.
L5
L7
ω
L
∆
Die Richtung des Drehimpulsvektors wird mit Hilfe der RechteHand-Regel gefunden. Wir bemerken, dass die Drehimpulsvektoren
der Teilchen parallel zueinander sind, weil
r
r r
r r
r
Li = mri × v i = mri × (ω × ri )
Siehe Abb. 12.
L1 L
2 L3
L4
L6
Figur 12. Der gesamte Drehimpuls des Velorads (des Ringes) ist zur
Winkelgeschwindigkeit parallel, weil die Drehimpulse der einzelnen
Teilchen parallel zueinander und zur Winkelgeschwindigkeit sind.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
i =1, N
i =1, N
Es folgt, dass der gesamte Drehimpuls einfach gefunden wird. Der
Betrag des gesamten Drehimpulses ist gleich der Summe der Beträge
der Drehimpulse der einzelnen Teilchen und die Richtung ist zur Winkelgeschwindigkeit parallel:
r
r
r
r
r
L = ∑ Li = ∑ ( mR 2 )ω = ( MR 2 )ω = I ∆ω
Wir erkennen einen Teil, der dem Trägheitsmoment des Velorads (des
Ringes) entspricht.
Im Allgemeinen schreiben wir:
r
r r
r
L = I ∆ω
nur wenn L / /ω
wobei L der gesamte Drehimpuls des Körpers bezüglich des Schwerpunkts ist, und ω ist die Winkelgeschwindigkeit um die Drehachse,
die durch den Schwerpunkt geht.
Die Beziehung gilt nur, wenn die Vektoren L und ω parallel zueinander sind.
10.2.6 Hauptachsen eines Körpers
Im Allgemeinen sind für einen Körper von beliebiger Form die Vektoren L und ω nicht parallel zueinander.
465
Man kann beweisen, dass es für jeden Körper mindestens drei
zueinander senkrechte Richtugen gibt, für die der gesamte
Drehimpuls parallel zur Winkelgeschwindigkeit ist. Diese
Achsen heissen die Hauptträgheitsachsen.
Für die Rotation um eine Hauptachse gilt
r
r
L = I ∆ω
nur für Rotation um Hauptachsen
Physik
466
Drehbewegung
wobei I∆ das Trägheitsmoment bezüglich der Hauptachse, L der
gesamte Drehimpuls des Körpers und ω die Winkelgeschwindigkeit
um die Achse ist.
10.2.7 Dynamik der starren Körper
Die Bewegungsgleichung des Schwerpunkts eines Teilchensystems,
die natürlich auch für einen starren Körper gilt, haben wir schon
erwähnt (Siehe Kap. 7.1.4)
r
r
r
dv
MaSP = M SP = Fext
dt
wobei Fext die resultierende äussere Kraft ist. Die Bewegung des
Schwerpunkts entspricht der Translationsbewegung des starren Körpers.
Für die Drehbewegung des Körpers gilt der sogenannte Drehimpulssatz.
Wir betrachten den gesamten Drehimpuls. Wenn wir den starren Körper als Teilchensystem betrachten, gilt
r
r
r
r r
dL
dL
= ∑ i = ∑ M = ∑ r × Fi
dt i =1,N dt i =1,N i i =1,N i
wobei Mi das auf das Teilchen i wirkende Drehmoment ist.
(
)
Als wir im Kap. 7.1.4 von der Dynamik des Schwerpunkts eines Teilchensystems gesprochen haben, haben wir die resultierende Kraft, die
auf ein Teilchen wirkt, in interne und externe Teile unterteilt:
r
r
r
Fi = Fi,int + Fi,ext
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
i
i =1, N
i
i,int
)
i =1, N
i =1, N
Es folgt, dass das resultierende Drehmoment, das auf das Teilchen i
wirkt, so geschrieben werden kann
r
r r
r r
r r
r r
+ Fi,ext = ∑ ri ×Fi,int + ∑ ri ×Fi,ext
i
∑ r × F = ∑ r ×(F
i =1, N
r1
1
r
F12 interne
F21 interne
2
467
Wegen dem Aktion-Reaktion Gesetz (Siehe Kap. 7.1.4) nehmen wir
an, dass die internen Kräfte zwischen Paaren von Teilchen wirken.
Die Drehmomente solcher Paare kompensieren einander.
Teilchen i
Siehe Abb. 13.
ri
r2
Figur 13. Das resultierende Drehmoment. Die durch innere Kräfte
ausgeübten Drehmomente von Paaren kompensieren einander.
Es folgt der Drehimpulssatz
r
r
r r
dL
= ∑ r ×F = M ext
dt i =1,N i i,ext
wobei Mext das resultierende Drehmoment ist.
Physik
468
Drehbewegung
Wenn die Drehung um eine Hauptachse stattfindet, kann der Drehimpulssatz so geschrieben werden
r
r
r
r
dω
dL d
= (I ω ) = I∆
= M ext
dt
dt dt ∆
Experiment: Garnrolle
Wir betrachten ein Garn, das um die Achse eines Yoyos aufgewickelt
ist. Das Yoyo besteht aus zwei identischen Zylindern und einem
koaxial dazwischen geklebten kleineren Zylinder.
Dass die Drehbewegung mit dem Drehmoment verknüpft ist, kann
man in der folgenden Weise demonstrieren: (Siehe Abb. 14).
1.
2.
F
Drehmoment verschwindet
F
Yoyo dreht nicht
r
Yoyo dreht nach links
aus Blattebene heraus
Drehmoment geht
r
F
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse in die Zeichenebene hinein geht. Das Yoyo dreht sich
nach rechts und das Garn wird um das Yoyo aufgewickelt.
Wir ziehen das Garn so, dass das Drehmoment bezüglich der
Drehachse aus der Zeichenebene heraus geht. Das Yoyo dreht sich
nach links und das Garn wird sich abrollen.
r
Drehmoment geht
Drehachse
in Blattebene hinein
Das Drehmoment ist für die Drehbewegung verantwortlich.
Yoyo dreht nach rechts
Figur 14.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Bewegung starrer K rper
10.2.8 Erhaltung des gesamten Drehimpulses
Wenn der Körper (oder ein System) isoliert ist, oder wenn das resultierende Drehmoment verschwindet, folgt aus dem Drehimpulssatz,
dass der gesamte Drehimpuls des Körpers konstant bleibt.
r
r
M ext = 0 ⇔ L = Konst.
Experiment: Drehimpulssatz mit Velorad
Wir betrachten die Anordnung der Abb. 15 (links). Eine Person hält
ein Velorad.
=0
Am Anfang dreht sich das Velorad um seine Achse “nach rechts”
(Siehe Abb. 15), so dass sein Drehimpuls nach oben zeigt. Der
gesamte Drehimpuls ist gleich
r
r
r
r
Lvor = LPerson + LVelorad = LVelorad
123
469
Die Person wird jetzt die Achse der Rotation des Velorads so ändern,
dass der Drehimpuls des Velorads nach unten zeigt, d.h. das Velorad
dreht sich “nach links”. Der Drehimpuls des Velorads hat sich so verändert
r
r
LVelorad → − LVelorad
Der gesamte Drehimpuls ist gleich
r
r
r
Lnach = LPerson − LVelorad
Weil der gesamte Drehimpuls erhalten werden muss, folgt
r
r
r
r
r
r
r
Lnach = LPerson − LVelorad = Lvor = LVelorad ⇒ LPerson = 2 LVelorad
Physik
470
Drehbewegung
L
Erhaltung des Drehimpulses.
L
2L
Die Person wird sich mit dem Drehimpuls 2LVelorad “nach rechts”
drehen.
Figur 15.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 11
Elektromagnetismus
11.1 Elektrische und magnetische
Felder
11.1.1 Das elektrische Feld
In Kap. 7.2.3 haben wir die Coulombsche (elektrostatische) Kraft
eingeführt.
Wenn wir eine Punktladung Q und, in einem bestimmten Abstand
von ihr, eine Punktladung q betrachten, so übt die Punktladung Q eine
Kraft auf die Punktladung q aus.
r
F=
r
1 qQ r
4πε 0 r 2 r
471
Die elektrische Kraft, die die Ladung Q auf eine Ladung q ausübt, ist
gleich
Physik
472
Elektromagnetismus
q
F
wobei ε0 die elektrische Feldkonstante, und r der Ortsvektor der
Ladung q ist. Der Ursprung des Koordinatensystems ist der Mittelpunkt der Ladung Q.
Siehe Abb. 1.
r
qQ>0
Die Kraft, die die Ladung Q auf die Ladung q ausübt.
Q
Figur 1.
Wir definieren das elektrische Feld der Punktladung Q als
r r
r
r r
1 Qr
F (r )
=
E (r ) ≡
4πε r 2 r
q
0
Siehe die Definition des Gravitationsfeld im Kap. 6.11.1.
Das Feld entspricht der Kraft, die eine Ladung q in diesem Feld
erfährt, dividiert durch ihre Ladung. Das Feld erklärt die Kraftwirkung auf eine endliche Distanz.
Wir sagen, dass die Punktladung Q ein elektrisches Feld im
ganzen Weltraum erzeugt. Im Allgemeinen erzeugt eine
Punktladung ein elektrisches Feld in jedem Punkt des Weltraums um sie. Dieses Feld übt eine elektrische Kraft auf
eine zweite Ladung q an deren Ort aus.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrische und magnetische Felder
Die zweite Ladung q spürt den lokalen Wert des Feldes und spürt
damit eine Kraft gleich
r r
r r
F ( r ) = qE ( r )
E
F = qE
E
Für eine positive Ladung q zeigt die Kraft in der Richtung des Feldes.
Für eine negative Ladung zeigt sie in entgegengesetzter Richtung.
Siehe Abb. 2.
q>0
q<0
Die Beziehung zwischen der Kraft und dem elektrischen Feld.
F = qE
Figur 2.
473
Definitionsgemäss zeigt das elektrische Feld einer positiven Ladung
weg von der Ladung und zu einer negativen hin.
Siehe Abb. 3.
Physik
474
Elektromagnetismus
E
E
Positive Ladung
+Q
E
E
E
Negative Ladung
–Q
Figur 3. Das elektrische Feld einer positiven und einer negativen
Punktladung.
11.1.2 Das elektrische Feld und die Relativität
E
Wir nehmen nun an, dass sich zwei Ladungen Q und q relativ zu
einem Beobachter O’ in Ruhe befinden.
und
r
rq ′ = ( x ′, y ′, 0)
Das Koordinatensystem wird so gewählt, dass die Ortsvektoren der
Ladungen die folgenden sind:
r
rQ ′ = (0, 0, 0)
Die elektrische Kraft, die auf q wirkt, hat die folgenden Kompenten:
r
1 qQ r
1 qQ
F′ =
r′ =
( x ′, y ′, 0)
4πε 0 ( r′ ) 3
4πε 0 ( r′ ) 3
Wir betrachten nun einen zweiten Beobachter O, relativ zu welchem
beide Ladungen und der Beobachter O’ sich mit einer Geschwindigkeit v=βc in der x-Richtung bewegen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrische und magnetische Felder
y
vt
z'
O'
x'2 q
y'
Q
y'2
x,x'
Beide Koordinatensysteme O und O’ fallen zur Zeit t=t’=0 zusammen.
O
Siehe Abb. 4.
z
Figur 4. Zwei Ladungen Q und q befinden sich in Ruhe relativ zum
Koordinatensystem O’, das sich relativ zum Koordinatensystem O mit der
Geschwindigkeit v in die x-Richtung bewegt.
Wir bestimmen die Kraft, die der Beobachter O misst.
Fx =
dpx c∆px γ (c∆px′ + β∆E ′ )
≈
=
=
dt
c∆t
γ (c∆t′ + β∆x ′ )
∆E ′
c∆px′
β ∆E ′
+
β
Fx ′ +
c∆t′
c∆t′
c ∆t′
=
=
β∆x ′
β
1 +
1 + ux′
c
c∆t′
475
Die Lorentz-Transformation (Siehe Kap. 6.7) für die x-Komponente
der Kraft, die auf ein Teilchen wirkt, ist gleich:
Physik
476
Elektromagnetismus
Elektrische und magnetische Felder
Fy ′
F′
; Fz = z
γ
γ
Aus den Transformations-Regeln für die Kraft folgt für den Fall, dass
die Geschwindigkeit des Teilchens gleich null ist:
Physik
1 qQ
1 1 qQ
x ′; Fy =
y ′; Fz = 0
4πε 0 ( r′ ) 3
γ 4πε 0 ( r′ ) 3
(
(
)
)
(
x
γqQ
3/2
Fx = 4πε
2 2
2
0
x
+
y
γ
y
y
qQ
γqQ
=
Fy =
4πε 0γ γ 2 x 2 + y 2 3 / 2 4πε 0 γ 2 x 2 + y 2
Fz = 0
)
3/2
2
(1 − β )
477
Die Kraft, die die Ladung Q zur Zeit t=t’=0 auf die Ladung q ausübt,
ist gleich
x ′ = γ ( x − βct) = γx; y ′ = y; z′ = z = 0 ⇒ r′ 2 = γ 2 x 2 + y 2
Zur Zeit t=t’=0 sind die Koordinaten der Ladung q gleich
Fx =
Die elektrische Kraft, die der Beobachter O beobachtet, ist dann
gleich
Wir haben in Kap. 7.2.2 schon erwähnt, dass die elektrische Ladung,
wie die Ruhemasse, relativistisch invariant ist (Siehe Kap. 6.9), d.h.,
die elektrische Ladung eines Teilchens ist für alle Beobachter gleich.
Fx = Fx ′ ; Fy =
wobei u die Geschwindigkeit des Teilchens ist, und wir die folgenden
Beziehungen für den relativistischen Energie-Impuls 4-Vektor
benutzt haben (Siehe Kap. 6.9)
E = γ ( E ′ + βcpx′ )
cp = γ (cpx′ + βE ′ )
x
cpy = cpy ′
cpz = cpz′
)
)
dE d r 2 2
=
p c + m02c 4
dt dt
r
r r
−1/ 2
r dp c 2 p dp r r
1 r
= ( p 2c 2 + m02c 4 ) (2c 2 p)
=
= u⋅F
dt
E dt
2
(
Die zeitliche Ableitung der Energie ist gleich
Es folgt,
(
β r r
F ′ + u′ ⋅ F ′
x
dp
c
Fx = x =
β
dt
1 + ux′
c
Die Lorentz-Transformation für die y-Komponente der Kraft ist
gleich:
c∆py′
dpy c∆py
c∆py′
Fy ′
1
1
c∆t′
Fy =
≈
=
=
=
∆
β
β
x
′
∆
∆
∆
γ
β
γ
γ
dt
c
t
c
t
+
x
′
′
(
)
1 + ux ′
1 +
c∆t′
c
und eine ähnliche Gleichung gilt für die z-Komponente.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
478
Elektromagnetismus
)
3/2
2
x
z
[rr + β y(er × er )]
(
2
,
,
)
0
1
0
3 / 2 ( x, y, 0) − β y (1
2
3
r
= ey
Die Kraft kann in Vektorform geschrieben werden als
(
)
γqQ
1
4πε 0 γ 2 x 2 + y 2
(
r γqQ
1
F=
4πε 0 γ 2 x 2 + y 2
=
(
(
)
)
)
)
r
γQ
r
r
vy
γQ
r
= q
e
3/2 + v ×
4πε 0c 2 γ 2 x 2 + y 2 3 / 2 z
4πε 0 γ 2 x 2 + y 2
3
144442
14442
r 444
r 44443
≡ EQ
≡ BQ
r
r r
= q EQ + v × BQ
(
Der erste Term EQ ist ein Vektorfeld, das der elektrischen Wechselwirkung entspricht. Wenn v=0 (d.h. γ=1) gilt
r
r
Q
r
EQ (v = 0) =
4πε 0 x 2 + y 2 3 / 2
und man erkennt das E-Feld, das wir in Kap. 11.1.1 definiert haben.
Der zweite Term v×BQ entspricht einer zusätzlichen Wechselwirkung
zwischen zwei bewegten Ladungen, der sogenannten magnetischen
Wechselwirkung. Das B-Feld wird als magnetisches Feld bezeichnet.
Die magnetische Wechselwirkung hängt von der Geschwindigkeit der
Teilchen ab und verschwindet, wenn die Geschwindigkeit der Teilchen v=0 ist.
Aus einer Folgerung des Coulombschen Gesetzes und der
Lorentz-Transformation der Relativitätstheorie haben wir
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrische und magnetische Felder
die allgemeine Form der elektromagnetischen Kraft zwischen zwei Ladungen hergeleitet.
(
)
r
ez
3/2
3/2
(
r
r
r
γQ
EQ =
4πε 0 γ 2 x 2 + y 2
)
3/2
(
)
vy
γQ
4πε 0c 2 γ 2 x 2 + y 2
(
vy
µ
0
γQ
4π
γ 2x2 + y2
r
ez
r
r
r r
F = q EQ + v × BQ
( Punktladung)
( Punktladung)
)
Die elektromagnetische Kraft zwischen den Punktladungen ist deshalb gleich
wobei
und
r
BQ =
=
Das Produkt ε0c2, das wir schon in Kap. 7.2.3 angetroffen haben,
wird in der folgenden Weise definiert:
1
≡ µ0
ε 0c 2
479
Das elektrische Feld und die elektrische Kraft sind radial. Die
magnetische Kraft wirkt senkrecht zur Bewegungsrichtung der
Ladungen.
Siehe Abb. 5.
Physik
480
Elektromagnetismus
Zusammenfassend kann man sagen, dass elektrische und magnetische
Wechselwirkungen zwei verschiedene Aspekte einer Eigenschaft der
Materie, d.h. ihrer Ladung, sind.
v
q
qEQ
qv×BQ
v
Der magnetische Term entspricht einer elektrischen Wechselwirkung
zwischen zwei Ladungen, wenn sie sich bewegen.
Q
Figur 5. Die elektrische und magnetische Kraft zwischen zwei Ladungen,
die sich mit derselben Geschwindigkeit v bewegen.
11.1.3 Die Lorentz-Kraft
Wir haben bewiesen, dass die allgemeine Form der elektromagnetischen Kraft zwei unterschiedliche Terme enthält.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrische und magnetische Felder
(
)
Die allgemeine elektromagnetische Kraft wird deshalb als Funktion
zweier Vektorfelder, des elektrischen und des magnetischen Feldes,
ausgedrückt
r r
r
r r r
F ≡ FE + FB = q E + v × B
Lorentz − Kraft
wobei E das elektrische Feld und B das magnetische Feld (oder
magnetische Flussdichte oder magnetische Induktion) ist. Diese
Form der elektromagnetischen Kraft heisst die Lorentz-Kraft1.
Im Allgemeinen können die Felder E und B Vektorfunktionen der
Raumkoordinaten und der Zeit sein
r r r
r r r
E ≡ E ( r , t) und B ≡ B( r , t)
Sie definieren eine Vektorgrösse (d.h. eine Grösse mit einem Betrag
und einer Richtung) in jedem Punkt des Raumes und der Zeit.
Elektrostatik
Magnetostatik
In der Elektrostatik oder der Magnetostatik betrachtet man Felder,
die sich mit der Zeit nicht ändern, d.h.
r r r
r r r
E4
≡2
E4
(3
r ) und B
≡2
B4
(3
r)
1
1
4
Wir erinnern uns daran, dass die elektromagnetische Lorentz-Kraft
als Folge der relativistischen Lorentz-Transformation der elektrischen Kraft erschienen ist.
Wir bemerken, dass
1.
481
eine Punktladung ein elektrisches Feld E in jedem Punkt des Weltraums um sie erzeugt. Das elektrische Feld übt die elektrische
Kraft qE auf eine zweite Ladung q an deren Ort aus.
1. H. Lorentz (1853-1928).
Physik
482
Elektromagnetismus
2.
eine bewegte Punktladung ein magnetisches Feld B in jedem Punkt
des Weltraums erzeugt. Das magnetische Feld übt die magnetische
Kraft qv×B auf eine zweite bewegte Ladung q aus. Siehe z.B. den
zweiten Term der Kraft in Kap. 11.1.2: für v=0 verschwindet er.
Einheit: im MKSA-System ist die Einheit des elektrischen Feld
gleich
r
Kraft N
[ E ] = Ladung
=
C
(Newton dividiert durch Coulomb).
r
Die Einheit des magnetischen Feld ist das Telsa (T)
Kraft
N
≡T
[B] = Ladung.Geschwindigkeit
=
C ( m / s)
Die Feldstärke des Erdmagnetfeldes ist ungefähr 10–4 T. Die Feldstärke eines Elektromagnets ist ungefähr 1-2 T. Supraleitende Elektromagneten können Feldstärken von ungefähr 10 T erreichen.
1 T = 10 4 G
Da das Erdmagnetfeld eine Grössenordnung ≈10–4 T hat, benutzt
man auch das Gauss (G):
Magnetische Kraft. Wir betrachten nun den magnetischen Term der
Lorentz Kraft.
die Kraft proportional zur Geschwindigkeit ist. Auf ein ruhendes
Teilchen wirkt keine magnetische Kraft.
Wir bemerken, dass
1.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Feldlininen
2.
3.
Die Kraft senkrecht zur Bewegungsrichtung und zur Richtung des
Feldes wirkt.
Der Betrag der magnetischen Kraft ist gleich
r
r r
FB = q v B sin α
B
v
+q
wobei α der Winkel zwischen v und B ist.
Siehe Abb. 6.
Fmag
Figur 6. Die magnetische Kraft wirkt senkrecht zur Ebene, die durch die
Geschwindigkeit und das Feld definiert ist.
11.2 Feldlininen
11.2.1 Elektrische Feldlinien
483
Feldlinien liefern eine graphische Darstellung von elektrischen und
magnetischen Feldern. Sie werden so definiert:
Physik
484
Elektromagnetismus
Die Feldlinien folgen in allen Punkten des Raumes der
Richtung des Feldes.
Die elektrischen Feldlininen beginnen bei positiven Ladungen und
enden bei negativen Ladungen oder im Unendlichen.
An einem bestimmten Punkt im Raum ist die “Liniendichte” zur
Stärke des Feldes an diesem Punkt proportional.
Um eine einzelne Punktladung sind die Feldlinien kugelsymmetrisch verteilt.
Die Anzahl der Feldlinien um eine Punktladung ist zur Grösse der
Ladung proportional.
Wir beginnen mit den elektrischen Feldlinien und erwähnen die folgenden Regeln:
1.
2.
3.
4.
Die elektrischen Feldlinien werden auch Kraftlinien genannt, weil sie
die Richtung der Kraft anzeigen, die das Feld auf eine positive
Ladung ausübt.
E
E
Feldlinien
+Q
E
Die elektrischen Feldlininen einer Punktladung sind z.B. in der
Abb. 7 gezeigt.
E
Elektrisches Feld
+Q
Figur 7. Die Beziehung zwischen dem elektrischen Feld und den Feldlinien.
Die Feldlinien folgen in jedem Punkt des Raumes der Richtung des Feldes.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Feldlininen
Die Dichte der Linien nimmt mit dem Abstand r von der Punktladung
ab. Wie erwartet, ist die Feldstärke zu 1/r2 proportional.
Beispiel: Der elektrische Dipol
Ein System aus zwei gleich grossen Ladungen mit entgegengesetzten
Vorzeichen und in relativ kleinem Abstand voneinander heisst elektrischer Dipol.
In der Nähe der positiven Ladung zeigen die Feldlinien radial nach
aussen und in der Nähe der negativen Ladung radial nach innen.
Die beiden Ladungen sind gleich gross und deshalb ist die Anzahl der
Linien, die von der positiven Ladung ausgehen, gleich der Anzahl der
Linien, die bei der negativen Ladung enden.
E
–Q
485
Das elektrische Feld ist stärker zwischen den zwei Ladungen, und die
“Dichte” der Linien ist deshalb dort höher.
Siehe Abb. 8.
+Q
Figur 8. Feldlinien des elektrischen Dipols. Die Linien gehen von der
positiven zur negativen Ladung.
Physik
486
Elektromagnetismus
11.2.2 Magnetische Feldlinien
Genau wie das elektrische Feld durch elektrische Feldlinien graphisch dargestellt werden kann, kann das magnetische Feld durch
magnetische Feldlinien (oder Induktionslinien) illustriert werden.
1.
2.
Wie bei einem elektrischen Feld gibt die Tangente in einem Punkt
an eine Induktionslinie die Richtung von B in diesem Punkt an.
Die Anzahl der Linien durch eine Fläche, die senkrecht zu den
Induktionslinien verläuft, d.h. die Dichte der Linien, ist zum
Betrag von B proportional.
Es gibt zwei wesentliche Unterschiede zwischen elektrischen und
magnetischen Feldlinien. Wir bemerken dazu, dass
1.
2.
die elektrischen Feldlinien immer auf positiven Ladungen beginnen und auf negativen Ladungen enden. Die elektrische und
magnetische Wechselwirkung sind zwei verschiene Aspekte einer
Eigenschaft der Materie, d.h. ihrer Ladung. Man hat nie eine
“magnetische Ladung” (sogenannte Monopole) in der Natur
beobachtet. Es folgt, dass es keine Punkte im Raum gibt, an
denen die magnetischen Feldlinien anfangen oder enden. Deshalb bilden die magnetischen Feldlinien geschlossene Schleifen.
die Kraft, die ein elektrisches Feld auf eine Ladung ausübt, wirkt
längs der Feldlinien. Im Gegensatz dazu wirkt die Kraft des
magnetischen Feldes nur auf eine bewegte Ladung und zwar senkrecht zum B-Feld und zur Bewegungsrichtung.
Beispiel: Das magnetische Feld der Erde
Im Jahre 1600 beobachtete W. Gilbert, dass die Erde selbst ein
magnetisches Feld erzeugt, dessen magnetische “Pole” in der Nähe
der geographischen Pole liegen.
Siehe Abb. 9.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrischer Strom
N
Magnetische Feldlinien
zeigen nach Norden
Drehachse der Erde
Die magnetischen Feldlinien zeigen vom magnetischen Nordpol zum
magnetischen Südpol (Konvention). Da der “Nordpol einer Kompassnadel” nach Norden zeigt, befindet sich der magnetische Südpol der
Erde im geographische Norden der Erde.
Magnetischer Südpol
S
Figur 9. Die Feldlinien des magnetischen Feldes der Erde gehen vom
geographischen Südpol zum Nordpol.
11.3 Elektrischer Strom
487
Wenn eine bestimmte Menge elektrischer Ladung in einem gegebenen Zeitintervall durch eine Querschnittsfläche tritt, fliesst ein elektrischer Strom durch die Fläche.
Physik
488
Elektromagnetismus
Die wirkliche Bewegung von Ladungen in einem leitenden Körper
kann sehr kompliziert sein.
Elektrischer Strom
dQ
dt
Physik
E freies
Elektron
1
3
≈ me v 2 ≈ kT
2
2
489
Unter dieser Annahme kann man die Geschwindigkeit der Elektronen
mit Hilfe des Gleichverteilungssatzes (Siehe Kap. 8.7) bestimmen.
Die mittlere kinetische Energie eines freien Elektrons ist gleich
Figur 10. Einfaches Modell des elektrischen Stroms durch einen leitenden
Kupferdraht.
–
–
–
–
+
+
+
+
+
+
+
+
–
–
–
–
Kupferdraht
bewegte
Positive KupferIonen im Ruhezustand Elektronen
Siehe Abb. 10.
Wenn es kein äusseres elektrisches Feld gibt, verhalten sich die Elektronen wie die Moleküle eines Gases in einem Behälter. Die freien
Elektronen sind mit den Gitterionen im thermodynamischen Gleichgewicht und tauschen durch Stösse Energie und Impuls mit ihnen aus.
Die erste mikroskopische Beschreibung wurde im Jahre 1900 von
Drude gefunden. Nach seinem klassischen Modell der elektrischen
Leitung ist ein Leiter ein dreidimensionales Ionengitter, in dem sich
Elektronen bewegen können.
Wenn der Ladungsfluss zeitlich nicht konstant ist, so wird die elektrische Stromstärke mit der Zeit variieren, und man definiert die
momentane elektrische Stromstärke als
I ( t) ≡
wobei dQ die Ladungsmenge ist, die in der Zeit dt durch die Fläche A
tritt. Man benutzt die historische Konvention, dass die positive
Stromrichtung der Flussrichtung der positiven Ladungen folgt.
1 A =1 C /s
Einheit: im MKSA-System wird die Stromstärke in Ampere2 (A)
gemessen
∆Q qn ( Av D ∆t)
=
= qnAv D
∆t
∆t
Wir nehmen nun an, dass jeder bewegte Ladungsträger eine Ladung q
hat, und dass er sich mit einer sogenannten Driftgeschwindigkeit vD
bewegt. Wenn die Dichte der beweglichen Ladungsträger gleich n ist,
dann ist die Stromsträrke, die durch eine Fläche A fliesst, gleich
I=
weil in dem Zeitintervall ∆t alle Ladungen, die sich im Volumen
AvD∆t befinden, durch die Fläche A fliessen.
Leitender Körper. Ein Leiter ist ein Körper, durch welchen sich
elektrische Ladungen bewegen können.
Beispiele: Metalle, ionisierte Gase, Mensch, Erde, usw...
2. A. Ampère (1775-1836).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
490
Elektromagnetismus
3kT
me
wobei me die Elektronenmasse ist, und es folgt
v≈
3kT
≈ 10 5 m / s
me
Bei Zimmertemperatur erhält man
v≈
Diese Geschwindigkeit können wir mit der Driftgeschwindigkeit der
Elektronen für eine bestimmte Stromstärke vergleichen.
Wir betrachten einen Kupferdraht mit einer Querschnittsfläche gleich
1mm2. Die Stromstärke ist 1 A. Wir nehmen an, dass es im Kupfer ein
freies Elektron pro Atom gibt. Die Dichte und molare Masse von
Kupfer sind 8,93 g/cm3 und 63,5 g/mol.
Dichte der freien Elektronen (1 freies Elektron pro Atom)
(8,93g / cm 3 )(6,02 × 1023 / mol) = 8,5 × 1022 Elektronen / cm 3
n=
63, 5 g / mol
Die Driftgeschwindigkeit ist dann gleich
I
1A
v =
=
qnA (1, 602 × 10 −19 C )(8, 5 × 10 22 Elektronen / cm 3 )(1mm 2 )
D
≈ 7 × 10 −5 m / s = 0, 07 mm / s
Diese Geschwindigkeit ist viel kleiner als die Elektronengeschwindigkeit, die wir mit Hilfe des Gleichverteilungssatzes berechnet
haben.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektrischer Strom
Wir haben sozusagen gefunden, dass die freien Elektronen sich nicht
ganz frei bewegen! Sie stossen sehr oft mit den Ionen und dadurch
wird die Richtung ihrer Bewegungen geändert.
λ = vτ
Die mittlere freie Weglänge λ wird definiert als die mittlere Wegstrecke, die ein Elektron zwischen zwei Stössen zurücklegt. Sie ist
gleich dem Produkt der mittleren Geschwindigkeit des Elektrons und
der Zeit zwischen zwei Stössen τ
Wenn ein äusseres elektrisches Feld auf ein Elektron die Kraft eE
ausübt, wird das Elektron beschleunigt und nach einer mittleren Zeit
τ wird es mit einem Ion zusammenstossen.
Weil die Driftgeschwindigkeit viel kleiner als die thermische
Geschwindigkeit der Elektronen ist, wird die Driftgeschwindigkeit
nach einem Stoss verschwinden.
Die Beschleunigung des Elektrons zwischen zwei Stössen ist deshalb
für die Driftbewegung verantwortlich
r
r
r
eτ r
r
r
−eE
F
τ=
τ = − E ≡ −µE
v D ≈ aτ =
me
me
me
wobei µ die Beweglichkeit der Elektronen ist.
Wir finden, dass die Driftgeschwindigkeit proportional zum elektrischen Feld ist.
491
Die Richtung der Elektronenbewegung ist zur Richtung des Feldes
parallel, zeigt aber in entgegengesetzer Richtung.
Siehe Abb. 11.
Physik
492
Elektromagnetismus
+
–
V
D
–
+
+
–
E
+
–
+
–
+
–
+
Figur 11. In einem Leiter wandern die Elektronen entgegen der Richtung
des elektrischen Feldes.
Wäre die Bewegung der Elektronen durch die Stösse nicht behindert,
so würden die Elektronen permanent mit einer Beschleunigung –eE/
me beschleunigt. Dass die Driftgeschwindigkeit der Elektronen proportional zum Feld ist, kann man aus dem Ohmschen Gesetz herleiten.
11.4 Berechnung der elektrischen und
magnetischen Felder
In einer mikroskopischen Beschreibung tritt die gesamte elektrische
Ladung immer als ganzzahliges Vielfaches der Elementarladung
(Siehe Kap. 7.2.2) auf.
In der Praxis können wir manchmal die Ladung in einem bestimmten
Raumgebiet als kontinuierlich verteilt betrachten.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der elektrischen und magnetischen Felder
Raumladungsdichte
Wir werden deshalb oft die Raumladungsdichte ρ benutzen, die so
definiert ist
r
dq
ρ( r ) ≡
dV
wobei dq die infinitesimale Ladung im Volumenelement dV ist. Die
Raumladungsdichte ist eine Skalargrösse3, d.h. sie definiert eine
Zahl (d.h. eine Grösse mit einem Betrag) in jedem Punkt des Raumes.
V
V
Es folgt, dass die gesamte Ladung eines Körpers gleich
r
Q ≡ ∫ dq = ∫∫∫ ρ( r ) dV = ∫∫∫ ρ( x, y, z) dxdydz
( Integration über das gesamte Volumen V )
V
V
V = ∫∫∫ dV = ∫∫∫ dxdydz
ist. Wir haben über das gesamte Volumen V integriert, und das
gesamte Volumen ist natürlich gleich
σ≡
dq
dA
Flächenladungsdichte
( Integration über die gesamte Fläche A)
493
Manchmal kann sich die Ladung in einer dünnen Schicht auf der
Oberfläche eines Körpers befinden. In diesem Fall ist es praktisch, die
Flächenladungsdichte σ zu definieren
und
A
Q ≡ ∫∫ dq
3. Vergleiche mit einer Vektorgrösse, die einen Betrag und eine Richtung definiert.
Physik
494
Elektromagnetismus
Die gesamte Fläche A ist gleich
A
A = ∫∫ dA
Dabei bedeutet das A unter dem Integral, dass wir über eine gesamte
Fläche A, von beliebiger Form, integrieren. Jedes Teilstück dA entspricht aber einer infinitesimalen ebenen Fläche.
dq
dl
Linienladungsdichte
In einer ähnlichen Weise wird man die Linienladungsdichte λ definieren:
λ≡
11.4.1 Berechnung des E-Feldes
Eine Punktladung dq erzeugt ein elektrisches Feld in einem bestimmten Punkt r gleich
r
r r
1 dq r
1 dq r
r
Coulomb
dE ( r ) =
=
4πε 0 r 2 r 4πε 0 r 3
wobei die Ladung sich im Ursprung des Koordinatensystems befindet.
r r
dq
1
r r (r − r ′)
4πε 0 r − r ′ 3
Wenn die Ladung sich in einem Punkt r’ befinden, dann ist das EFeld gleich
r r
dE ( r ) =
Für eine gegebene kontinuierliche Ladungsverteilung wird das
erzeugte elektrische Feld an einem bestimmten Ort im Raum gleich
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der elektrischen und magnetischen Felder
der Vektorsumme der E-Felder, die von den einzelnen Ladungen
dq=ρdV erzeugt werden (Prinzip der Superposition):
r
r
r
r
1 ρ( r ′ ) r r
E ( r ) = ∫∫∫ dE = ∫∫∫
r r ( r − r ′ ) dV
4πε 0 r − r ′ 3
V
V
Beispiel: Elektrisches Feld eines langen geladenen Stabes
Wir berechnen das Feld, das in einem Punkt auf der Mittelsenkrechten erzeugt wird. Wir nehmen an, dass der Stab homogen geladen ist
mit einer Linienladungsdichte λ.
Die Geometrie für die Berechnung wird in Abb. 12 gezeigt.
Die Koordinaten werden so gewählt, dass der Stab sich längs der xRichtung befindet.Wir sind am Feld in einem Punkt mit Abstand r
vom Stab interessiert.
λdx
1 dq
1
=
4πε 0 R 2 4πε 0 x 2 + r 2
Die Feldstärke, die durch ein Ladungselement dq=λdx erzeugt wird,
ist gleich
r
dE =
r
r
r
r
r
dE = dE1 cosθ + dE 2 cosθ = 2 dE1 2
x + r2
495
Wir bemerken, dass die x-Komponenten des Feldes von den Ladungselementen in +x und –x einander kompensieren, so dass das resultierende Feld radial und gleich
ist.
Physik
496
Elektromagnetismus
dq = λdx
dx
Figur 12.
x
dE1
θ
λ
dE
dq
Coulomb pro Meter
R
2
x
+
dE2
=
2
r
r
r
λdx
1
dE = 2
4πε 0 x 2 + r 2 x 2 + r 2
r
Die Geometrie, um das Feld eines geladenen Stabes zu berechnen.
Es folgt daraus,
2
dx
+ r2)
3/2
=
x
r2 x 2 + r2
A
0
=
r2 A2 + r2
A
Das gesamte E-Feld ist gleich dem Integral über dx. Das Ergebnis der
Integration können wir in Tabellen finden. Es gilt
A
0
∫ (x
und wir erhalten
r
dx
A
λr A
λ
=2
E =2
4πε 0 ∫0 ( x 2 + r 2 ) 3 / 2
4πε 0 r A 2 + r 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der elektrischen und magnetischen Felder
Wenn die Länge des Stabes viel grösser als der Abstand r ist, können
wir den Stab als unendlich betrachten.
In diesem Fall ist A>>r und wir finden
r
2λ 1
( unendlicher Stab)
E ≈
4πε 0 r
Das wichtige Ergebnis der Berechnung ist, dass das elektrische Feld
mit 1/r (und nicht 1/r2 wie im Fall einer Punktladung) vom Abstand
abhängt.
11.4.2 Berechnung des B-Feldes
r
r
r
Biot − Savart
Eine Punktladung dq, die sich mit der Geschwindigkeit v bewegt,
erzeugt ein magnetisches Feld in einem bestimmten Punkt, das durch
das Biot-Savartsche Gesetz4 bestimmt ist. Das Feld in einem Punkt r
ist gleich
r
r
µ dq r
dB( r ) = 0 2 v ×
4π r
wobei v der Geschwindigkeitsvektor des Teilchens ist.
(Vergleiche mit dem Coulombschen Gesetz).
Wir bemerken, dass
1.
497
der Betrag des Feldes der Ladunq dq und der Geschwindigkeit v
proportional ist und umgekehrt proportional zum Quadrat des
Abstandes r von der Ladung.
4. J.B. Biot (1774-1862) und F. Savart (1791-1841).
Physik
498
Elektromagnetismus
2.
3.
der Betrag zu sinγ proportional ist, wobei γ der Winkel zwischen
der Geschwindigkeit und dem Ortsvektor ist.
das Feld senkrecht zum Geschwindigkeitsvektor und Ortsvektor
ist. Seine Richtung wird durch die Rechte-Hand-Regel definiert.
Historisch wird das Produkt aus der Ladung und der Geschwindigkeit
vdq durch das Stromelement Idl ersetzt
r
r
dq r
(dq)v = (vdt) = Idl
dt
Das erzeugte magnetische Feld ist in diesem Fall gleich
r
r r
µ I r r
Biot - Savart
dB( r ) = 0 2 dl ×
r
4π r
Ausser dem Betrag gibt das Gesetz natürlich noch die Richtung des
Feldes an, die die Richtung des Vektorprodukts aus dl und r ist. Das
resultierende magnetische Feld in einem Punkt wird durch das Vektorintegral über alle Stromelemente gefunden:
r r
r
B( r ) = ∫ dB
Beispiel: Magnetisches Feld eines langen geraden Leiters
Wir betrachten einen langen geraden Leiter, durch den ein Strom I
fliesst. Siehe Abb. 13.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Berechnung der elektrischen und magnetischen Felder
=
I
r
µ
= 0 2
dx
4π ( x + r 2 )
x 2 + r2
r
µ0I
dx
4π ( x 2 + r 2 ) 3 / 2
dB =
Der Betrag des Feldes, das von einem infinitesimalen Leiterelement
dx erzeugt wird, ist gleich
r
µ0 I r R µ0 I
dx sin α
dx × =
R 4π R 2
4π R 2
α
dx
R
x
dB
geht aus der Blattebene heraus
i
r
Ein langer gerader Leiter durch welchen ein Strom fliesst.
499
Die Richtung der magnetischen Feldelemente dB von allen möglichen Leiterelementen dx haben im betrachteten Punkt dieselbe Richtung, nämlich senkrecht zur Blattebene und aus der Blattebene
heraus.
Figur 13.
Physik
500
Elektromagnetismus
r
rx
µI ∞
µI
0
dx = 0 2 2
4π ∫−∞ ( x 2 + r 2 ) 3 / 2
4π r ( x + r 2 )1/ 2
∞
−∞
=
2µ 0 I
4πr
Das Integral reduziert sich damit auf ein Skalarintegral der Beträge.
Für einen unendlich langen Leiter ist das Integral gleich
B( r ) =
Das wichtige Ergebnis der Berechnung ist, dass das magnetische Feld
von 1/r abhängt und proportional zum Strom I ist.
Die Feldlinien eines solchen Feldes sind in Abb. 14 gezeigt.
i
B
Figur 14. Die magnetischen Feldlinien eines langen geraden Leiters, durch
welchen ein elektrischer Strom i fliesst.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Bewegte Ladungen in elektrischen und magnetischen Feldern
11.5 Bewegte Ladungen in elektrischen
und magnetischen Feldern
11.5.1 Elektrische potentielle Energie und elektrisches
Potential
Wir betrachten zwei Ladungen q und Q im Abstand r voneinander.
Wenn die Ladungen ungleichnamig sind (d.h. sie ziehen einander an)
und man will den Abstand zwischen den Ladungen vergrössern, muss
man Arbeit an den Ladungen leisten.
Wenn die Ladungen gleichnamig sind (d.h. sie stossen einander ab),
erhält man Arbeit, wenn der Abstand sich vergrössert. In diesem Fall
wird die von den Ladungen geleistete Arbeit einen negativen Wert
besitzen.
Diese Arbeit wird im System der Ladungen als elektrische potentielle Energie gespeichert (Siehe Kap. 3.8 für die Definition der potentiellen Energie).
1 qQ
4πε 0 r
Wir haben von der elektrischen potentiellen Energie schon in
Kap. 7.2.5 gesprochen (Siehe auch Kap. 3.8.4), als wir das klassische Atom-Modell betrachtet haben. Wir haben dort bewiesen, dass
wenn sich die Ladungen q und Q im Abstand r voneinander befinden,
die elektrische potentielle Energie der Ladung q gegeben ist durch
r
E e pot ( r ) =
501
Die potentielle Energie hängt nur vom Betrag des Abstandes zwischen den Ladungen ab.
Physik
502
Bewegte Ladungen in elektrischen und magnetischen Feldern
1, 5 × 10 −10
= 1, 5 × 10 −10 J =
eV =
e
≈ 938 × 10 6 eV = 938 MeV = 0, 938 GeV
2
m p c 2 = (1, 67 × 10 −27 kg)( 3 × 10 8 m / s) =
Beispiel: die gesamte Energie eines Protons, das sich in Ruhe befindet
Das Elektronvolt ist deshalb gleich der gesamten Energiezunahme,
wenn ein Teilchen mit der Elementarladung e durch einen Potentialunterschied von 1 Volt beschleunigt wird.
E = m0c 2 + E kin + E pot
r
= γm0c 2 + qV ( r )
r
1
≈ m0c 2 + m0v 2 + qV ( r ) wenn v << c
2
Wir bemerken, dass die gesamte Energie eines Elementarteilchens
ausgedrückt werden kann als
1 eV ≡ (e) Joule = 1, 602 × 10 −19 J
Wenn wir Elementarteilchen wie Elektronen oder Protonen betrachten, dann ist das Elektronvolt (eV) eine praktische Einheit für die
Energie der Teilchen. Das Elektronvolt ist ein Mass der Energie. Die
Umrechnung von Elektronenvolt in Joule ist die folgende:
Elektromagnetismus
)
11.5.2 Das Elektronvolt
(
Wir konnten die elektrische potentielle Energie definieren, weil die
elektrische Kraft konservativ ist (Siehe Kap. 3.8.1).
A
Die Arbeit, die durch die elektrische Kraft F=qE geleistet wird, wenn
eine Ladung q entlang des Weges S vom Punkt A zum Punkt B verschoben wird, ist unabhängig vom Weg S:
B r r
r
r
W AB = ∫ F .dr ≡ − E pot ( rB ) − E pot ( rA ) = − ∆E pot
Es folgt,
A
B r r
q ∫ E .dr = −∆E pot
Das elektrische Potential (eine skalare Grösse) wird definiert als
r
E e (r )
r
r
r
V ( r ) ≡ pot
⇔ E epot ( r ) ≡ qV ( r )
q
es gilt deshalb
r
r
e
e
B r
r
r
r
(
E
r
pot
B ) − E pot ( rA )
= −(V ( rB ) − V ( rA ))
E .dr = −
q
A
∫
Einheit: das Volt (V)
Energie] J
= =V
[Ladung] C
oder ungefähr 1 Milliarde Elektronenvolt. Dieser Wert ist gleich der
kinetischen Energie eines Teilchens der Ladung e, wenn es durch
einen Potentialunterschied von 1 Milliarde Volt beschleunigt wird.
[V ] = [
Beispiel: Elektrisches Potential einer Punktladung
r
E (r )
r
1 Q
pot
V (r ) ≡
=
(Punktladung)
4πε 0 r
q
Physik
503
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
504
Elektromagnetismus
gie des Teilchens wird sich nicht ändern, sondern nur seine Bewegungsrichtung.
Bewegte Ladungen in elektrischen und magnetischen Feldern
Bahnkurve
v
F
qvB =
γm0v 2
r
–q
F = (–q) v X B
⇔
r=
γm0v
qB
505
Die Ablenkung eines Elektrons in einem homogenen magnetischen
Elektronquelle
Figur 15.
Physik
Die magnetische Kraft wirkt als eine Zentripetalkraft
Feld.
B zeigt aus
der Blattebene heraus
Homogenes magnetisches Feld
Siehe Abb. 15.
Wir betrachten ein homogenes magnetisches Feld. Wenn sich das
Teilchen genau senkrecht zum Feld bewegt, so beschreibt das Teilchen eine Kreisbahn.
11.5.3 Bewegung einer Punktladung in einem
elektrischen Feld
Unter der Wirkung der elektischen Kraft erfährt ein Teilchen der
Ladung q und Masse m die Beschleunigung
r
r
r
r
q r
F = qE = ma ⇒ a = E
m
Wir bemerken, dass die Geschwindigkeit von geladenen Elementarteilchen wie Elektronen oder Protonen in elektrischen Feldern oft so
hoch ist, dass wir die relativistische Masse benutzen müssen
r
q r
E
a=
γm0
Experiment: Elektronenquelle (Elektronkanone)
11.5.4 Bewegung einer Punktladung in einem
magnetischen Feld
Die Wirkung des magnetischen Feld ist immer senkrecht zur Bewegungsrichtung. Es folgt, dass durch die Wirkung des magnetischen
Feldes ein Teilchen nur die Richtung und nicht den Betrag seiner
Geschwindigkeit ändert.
Da die magnetische Kraft immer senkrecht zur Bewegungsrichtung
einer Ladung wirkt, ist die an dem Teilchen verrichtete Arbeit null
(Siehe Kap. 3.6):
r r
r r r r
F⊥v ⇒ W = F ⋅ ∆r = F ⋅ v ∆t = 0
Das magnetische Feld leistet somit keine Arbeit an dem Teilchen und
hat keinen Einfluss auf seine kinetische Energie. Die kinetische Ener-
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
506
Elektromagnetismus
wobei r der Radius der Kreisbahn, m0 die Ruhemasse des Teilchens,
und v die Geschwindigkeit des Teilchens ist.
qB
γm0
Da ω=v/r ist, ist die Winkelgeschwindigkeit ω gleich
ω=
2π 2πγm0
=
qB
ω
Die Zeit T, die für einen Umlauf des Teilchens benötigt wird, ist
T=
wenn
v << c
und die Frequenz des Umlaufes (die als Zyklotronfrequenz bezeichnet wird) ist gleich
1
qB
qB
ν= =
≈
T 2πγm0 2πm0
Diese Frequenz ist vom Radius der Kreisbahn unabhängig. Für nicht
relativistische Teilchen ist die Umlauffrequenz eine Konstante, die
unabhängig von der Geschwindigkeit des Teilchens ist.
Blasenkammer. In einer Blasenkammer werden die Bahnen geladener Teilchen nachgewiesen.
Siehe Abb. 16.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Strahl von
geladenen
Elementarteilchen
von einem
Beschleuniger
Kamera
Bewegte Ladungen in elektrischen und magnetischen Feldern
Flüssiger Wasserstoff
Licht
Figur 16. Die 10-inch Blasenkammer am Lawrence Radiation Laboratory,
University of California, Berkeley.
Man kann eine Blasenkammer in ein magnetisches Feld stellen und
von aussen Teilchen aus einem Beschleuniger in die Kammer schiessen.
Siehe z.B. Abb. 17.
Die Bahnkurve eines Elektrons und eines Protons sind sichtbar. Das
magnetische Feld ist zur Blattebene senkrecht und besitzt einen
Betrag von 1.17 Tesla.
507
Das Elektron verliert Energie wenn es sich durch die Kammer bewegt
und seine Bahnkurve ist deshalb eine Spirale. Der Anfangsradius der
Spirale ist 7.3cm.
Physik
508
Elektromagnetismus
B = 1.17 tesla
R i = 7.3 cm
p
e-
Figur 17. Eine Aufnahme von der Blasenkammer am Lawrence Radiation
Laboratory, University of California, Berkeley. Die Bahnkurve eines
Elektrons und eines Protons werden nachgewiesen. Das magnetische Feld
besitzt einen Betrag von 1.17Tesla und der Anfangsradius der Spirale des
Elektrons ist gleich 7.3cm. Das Elektron verliert Energie wenn es sich
durch die Kammer bewegt und deshalb ist die Bahnkurve eine Spirale.
Wenn ein Teilchen nicht genau senkrecht in ein magnetisches Feld
eintritt, wird sein Geschwindigkeitsvektor in eine Komponente parallel und eine Komponente senkrecht zum Feld zerlegt.
Der senkrechte Teil führt zu einer Kreisbewegung. Der parallele Teil
wird durch das Feld nicht beeinflusst.
Die Überlagerung ergibt eine Helix.
Siehe Abb. 18.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Helix.
θ
v
Der Fluss und die Divergenz
Figur 18.
v
B
v
v
11.6 Der Fluss und die Divergenz
11.6.1 Die Definition des Flusses
v
Der Fluss ist eine charakteristiche Grösse, die man für alle Vektorfelder einführen kann.
Der Fluss dφ eines Vektorfeldes F durch eine infinitesimale Fläche
dA wird definiert als (der Fluss ist eine Skalargrösse)
r r r r
dφ ≡ F ⋅ dA = F dA cosθ
wobei dA ein Vektor ist, der dem infinitesimalen Flächenelement dA
entspricht.
509
Die infinitesimale Oberfläche kann als eben betrachtet werden. Der
Betrag des Vektors dA ist gleich der Fläche der infinitesimalen Oberfläche und die Richtung ist senkrecht zur Ebene der Fläche.
Physik
510
Elektromagnetismus
Der Winkel θ ist der Winkel zwischen dem Vektor F und dem Vektor
des Flächenelements dA.
Siehe Abb. 19.
dA
θ
φ<0
dA
F
φ=0
90°
F
Definition des Flusses durch eine infinitesimale Fläche dA.
F
dA
Der Fluss ist gleich dem Produkt aus der Komponente des Vektors F,
die senkrecht zur Oberfläche der Fläche dA steht, und dem Betrag der
Fläche dA.
φ>0
θ
Figur 19.
A
Der Fluss und die Divergenz
geschlossene A
∫∫
Das Integral über eine solche Oberfläche wird so bezeichnet
r r
( geschlossene Oberfläche A)
F ⋅ dA
φ≡
11.6.2 Der elektrische und magnetische Fluss
A
Der elektrische Fluss durch eine Fläche A wird definiert als der Fluss
des elektrischen Feldes durch die Fläche
r r
φ E ≡ ∫∫ E ⋅ dA
( Elektrischer Fluss)
A
Der Fluss des magnetischen Feldes durch eine Fläche A wird in Analogie zum elektrischen Fluss definiert als
r r
φ B ≡ ∫∫ B ⋅ dA
( Magnetischer Fluss)
Können wir die physikalische Bedeutung dieser Integrale finden?
Wir betrachten den elektrischen Fluss. Die elektrischen Feldlinien
(Siehe Kap. 11.2) können uns helfen, uns den elektrischen Fluss vorzustellen.
1.
2.
An Punkten der Oberfläche, an denen die elektrischen Feldlinien
die Oberfläche verlassen, zeigt das Feld E ebenfalls nach aussen.
Der Fluss ist dann positiv.
An Punkten der Oberfläche, an denen die elektrischen Feldlinien
in die Oberfläche eindringen, zeigt das Feld E nach innen. Der
Fluss ist dann negativ.
Wir erinnern uns daran, dass die elektrischen Feldlininen bei positiven Ladungen beginnen und bei negativen Ladungen enden (Siehe
Kap. 11.2).
Für eine endliche Fläche von beliebiger Form wird der Fluss durch
Integration der infinitesimalen ebenen Flächenelemente gewonnen.
Der gesamte Fluss durch die Oberfläche A ist deshalb gleich
r r
φ ≡ ∫∫ F ⋅ dA
( Integration über die gesamte Fläche A)
Häufig sind wir am Fluss durch eine geschlossene Oberfläche interressiert. Definitionsgemäss zeigen in diesem Fall die infinitesimalen
Flächen dA an jedem Punkt der Oberfläche nach aussen.
Physik
511
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
512
Elektromagnetismus
Siehe Abb. 20.
Q=+5
Feldlinien von pos. und neg. Punktladungen
Q=–3
Figur 20. Die elektrischen Feldlinien beginnen bei positiven Ladungen und
enden bei negativen Ladungen.
Deshalb werden positive Ladungen als Quelle und negative Ladungen als Senke des elektrischen Flusses betrachtet. Positive Ladungen erzeugen elektrischen Fluss und negative Ladungen vernichten
ihn.
Es gibt eine anschauliche Beziehung zwischen dem Fluss und den
Feldlinien. Wir bemerken, dass der gesamte Fluss proportional ist
zur Zahl der Feldlinien, die die Oberfläche verlassen, minus der
Zahl der Feldlinien, die in die Oberfläche eindringen. (Wir erinnern uns daran (Siehe Kap. 11.2), dass an einem bestimmen Punkt im
Raum die “Liniendichte” zur Stärke des Feldes an diesem Punkt proportional ist. Es folgt daraus, dass der Fluss durch die Fläche von der
Zahl der Feldlinien, die die Oberfläche kreuzen, abhängt.)
Siehe Abb. 21.
In der Abbildung beobachtet man, dass der Fluss durch die Fläche A
proportional zu +5 ist, weil 5 Feldlinien sie verlassen. Der Fluss
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Fluss und die Divergenz
+5
C
A
durch die Fläche B ist zu –3 proportional, weil 3 Feldlinien in sie eindringen. Der Fluss durch die Fläche C ist proportional zu 2, weil nur
zwei Feldlinien sie verlassen.
B
–3
513
Figur 21. Der elektrische Fluss. Der Fluss ist zur Zahl der Linien, die die
Oberfläche verlassen, minus der Zahl der Linien, die in die Oberfläche
endringen, proportional.
Physik
514
Elektromagnetismus
Wir müssen die positive Ladung als eine Flussquelle von 5 Einheiten
und die negative Ladung als Flusssenke, die 3 Einheiten vernichtet,
betrachten.
+5(Quelle) − 3( Senke) = 2
Wie erwartet, ist der Fluss durch C die Summe der Quelle minus der
Senke und ist deshalb zu
proportional.
Beispiel: Elektrischer Fluss durch eine geschlossene Oberfläche, die
eine Punktladung umfasst.
Wir betrachten nun eine quantitative Bestimmung des Flusses durch
zwei kugelförmige (geschlossene) Oberflächen, die als A1 und A2
bezeichnet werden, in deren Mittelpunkt eine Punktladung Q liegt.
Siehe Abb. 22.
A1
Der Fluss durch die Fläche A1 mit Radius R1 ist gleich
r r
φ A1 ≡ ∫∫ E ⋅ dA
A1
Wir bemerken, dass das elektrische Feld überall auf der Oberfläche
A1 denselben Betrag besitzt und dass es immer radial ist.
A1
Es folgt,
r r
r r
r
r
φ A1 ≡ ∫∫ E ⋅ dA = ∫∫ E1 dA cosθ = E1 ∫∫ dA = E1 ( 4πR12 )
A1
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Der Fluss und die Divergenz
E2
E1
Q
r1
A1
A2
r2
Figur 22. Fluss durch zwei kugelförmige Oberflächen, die eine Punktladung
umfassen.
A2
A2
A2
Für die Fläche A2 gilt es
r r
r r
r
r
φ A 2 ≡ ∫∫ E ⋅ dA = ∫∫ E 2 dA cosθ = E 2 ∫∫ dA = E 2 ( 4πR22 )
r
E1 =
1 Q
4πε 0 R12
und
r
E2 =
1 Q
4πε 0 R22
515
Im Fall der Punktladung kennen wir den Ausdruck für das Feld als
Funktion des Abstandes. Es ist durch das Coulombsche Gesetz gegeben
Physik
516
Elektromagnetismus
1 Q
(4πR12 ) = εQ
4πε 0 R12
0
und der Fluss beim Radius R1 ist deshalb gleich
r
φ A1 = E1 ( 4πR12 ) =
und in einer ähnlichen Weise gilt
φA2
r
1
Q
= E 2 ( 4πR22 ) =
(4πR22 ) = εQ
4πε 0 R22
0
φ A1 = φ A 2
der Fluss durch die Fläche A1 gleich dem Fluss durch die Fläche
A2 ist. Es war zu erwarten, weil die Zahl von Feldlinien, die die
beiden Oberflächen kreuzen, dieselbe ist (die Feldlinien sind
radial, und jede Linie, die A1 kreuzt, wird auch A2 kreuzen!)
Wir beobachten, dass
1.
2.
der Fluss zur Punktladung Q, die von der Fläche eingeschlossen
wird, proportional ist. Die Proportionalitätskonstante ist die elektrische Feldkonstante
Q = ε 0φ A1 = ε 0φ A 2
11.6.3 Die Divergenz des Feldes
Wir betrachten nun den Fluss durch eine geschlossene Oberfläche,
die ein Volumenenelement dV umschliesst..
dV = dxdydz
Das Volumenelement ist gleich
Siehe Abb. 23.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
z
dy
y
dz
dx
Ein infinitesimales Volumenelement.
x
Der Fluss und die Divergenz
dA2
Figur 23.
(
)
Das Feld besitzt die folgenden drei Komponenten:
r
F = Fx , Fy , Fz
dA1
Wenn das Volumenelement infinitesimal ist, können wir annehmen,
dass das Feld über jede seiner Oberflächen konstant ist.
Der Fluss durch die Fläche dA1 ist gleich
dφ1 = Fy ( x, y + dy, z) dxdz
517
wobei wir das Feld über die Fläche dxdz konstant angenommen
haben.
Physik
518
Elektromagnetismus
Der Fluss durch die Fläche dA2 ist gleich
dφ 2 = − Fy ( x, y, z) dxdz
wobei das negative Vorzeichen daher kommt, dass der Winkel zwischen dem Feld und der Fläche, die nach aussen zeigt, gleich 180° ist.
Die Summe der Flüsse ist gleich
)
dφ1 + dφ 2 = Fy ( x, y + dy, z) dxdz − Fy ( x, y, z) dxdz
(
= Fy ( x, y + dy, z) − Fy ( x, y, z) dxdz
∂F ( x, y, z)
dydxdz
∂y
y
Der Fluss und die Divergenz
wobei wir den Nabla-Operator für die Divergenz des Feldes im
Punkt (x,y,z) eingeführt haben (Siehe Kap. 3.8.3).
Divergenz von F
r r
∂F ( x, y, z) ∂Fy ( x, y, z) ∂F ( x, y, z)
+
+ z
∇ ⋅ F ( x, y, z ) = x
∂x
∂y
∂z
1444444424444444
3
r
Das Symbol ∇ hat die folgende Bedeutung:
r ∂ ∂ ∂
∇≡ , ,
∂x ∂y ∂z
r r
∂f r ∂f r ∂f r
G = ∇f = ex + ey + ez
∂z
∂y
∂x
r r
F
∂
F
∂
F
∂
y
d = ∇⋅ F = x +
+ z
∂x
∂y
∂z
Es muss immer auf etwas operieren, wie z.B.
Gradient (Vektorgrösse):
=
Eine ähnliche Herleitung gilt auch für die zwei anderen Komponenten. Der gesamte Fluss durch die Oberfläche ist dann gleich
Divergenz (Skalargrösse):
)
Physik
519
Wir betrachten die Oberfläche, die beide Volumenelemente verbindet.
Der Fluss, der durch diese Oberfläche das Volumenelement dV1 verlässt, wird in das Volumenelement dV2 eindringen. In diesem Grenzpunkt werden die Flüsse, die dV1 verlassen und in dV2 eindringen,
einander kompensieren.
Nehmen wir einmal an, dass wir zwei Volumenelemente dV1 im
Punkt (x1,y1,z1) und dV2 im Punkt (x2,y2,z2) so neben einander stellen, dass sie sich berühren. Wir berechnen den gesamten Fluss, der
beide Volumenenelemente verlässt.
∂Fy
∂F
∂F
dy dxdz + z dz dxdy
dφ tot ( x, y, z) = x dx dydz +
∂x
∂z
∂y
∂F ( x, y, z) ∂F ( x, y, z) ∂F ( x, y, z)
y
+
+ z
= x
dxdydz
∂x
∂y
∂z
1444444424444
44443
r
Divergenz von F
wobei die Divergenz des Vektorfeldes F am Punkt (x,y,z) definiert
wurde.
(
Die Divergenz des Feldes in jedem Punkt (x,y,z) ist gleich
dem Fluss, der das Volumenelement im Punkt (x,y,z) des
Volumens dxdydz verlässt, pro Volumeneinheit.
r r
dφ tot ( x, y, z) = ∇ ⋅ F ( x, y, z) dxdydz
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
520
Elektromagnetismus
Wir können deshalb den gesamten Fluss, der beide Volumenelemente
verlässt, als die Summe der Flüsse, die die einzelnen Volumenelemente verlassen, betrachten:
(
)
(
)
dφ tot = dφ ( x1, y1, z1 ) + dφ ( x 2 , y 2 , z2 )
r r
r r
= ∇ ⋅ F ( x1, y1, z1 ) dxdydz + ∇ ⋅ F ( x 2 , y 2 , z2 ) dxdydz
V
V
(
)
)
V
(
)
Um dieses Ergebnis auf ein endliches, nicht-infinitesimales Volumen
zu erweitern, addieren wir die Flüsse, die in jedem Punkt des ganzen
Volumens die inifinitesimalen Volumen dV verlassen:
r r
r r
φ tot = ∫∫∫ dφ = ∫∫∫ ∇ ⋅ F ( x, y, z) dxdydz = ∫∫∫ ∇ ⋅ F dV
(
Volumenintegral
Zusammenfassend haben wir das Theorem der Divergenz (oder
Theorem von Gauss) für den gesamten Fluss φtot, der ein Volumen V
verlässt, hergeleitet:
r r
r r
φ tot ≡ ∫∫ F ⋅ dA = ∫∫∫ ∇ ⋅ F dV
A =∂
V 24
V4
1
4
3 1
4244
3
Flächenintegral
wobei A die Oberfläche ist, die das Volumen V umschliesst. Dieses
Theorem stellt ein Flächenintegral mit einem Volumenintegral in
Beziehung.
11.7 Das Gauss’sche Gesetz
Wir betrachten nun die elektrischen und magnetischen Felder.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Gauss sche Gesetz
11.7.1 Gesetz für das elektrische Feld
Im Kap. 11.6.2 haben wir gesehen, dass positive Ladungen elektrischen Fluss erzeugen und dass negative Ladungen ihn vernichten.
Wir betrachten das infinitesimale kugelförmige Volumenelement dV in
einem Punkt (x,y,z), das eine Ladung dq enthält. Die Ladung verhält
sich wie eine Flussquelle (dq>0) oder eine Flusssenke (dq<0).
ε 0 dφ = dq
Der Fluss, der das Volumenelement wegen der Anwesenheit der
Ladung verlässt, ist gleich (Siehe Kap. 11.6.2)
oder
(
)
r r
ε 0 ∇ ⋅ E ( x, y, z) dV = ρ( x, y, z) dV
wobei wir den Fluss, der das Volumenelment verlässt, durch die
Divergenz des Feldes im Punkt (x,y,z) ersetzt haben.
(
Gesetz von Gauss für das elektrische Feld
)
Es folgt,
r r r
r
ε ∇ ⋅ E ( r ) = ρ( r )
0
Man spricht von der differentiellen Form des Gauss’schen Gesetzes.
Diese Beziehung gilt in jedem Punkt des Raumes. Es sagt nichts über
das Feld aus, sondern nur etwas über dessen Divergenz (die Summe
der partiellen Ableitungen des Feldes).
521
Diese Beziehung zwischen der Divergenz des elektrischen
Feldes und der Ladungdichte im jedem Punkt des Raumes
Physik
522
Elektromagnetismus
entspricht einem fundamentalen Gesetz des Elektomagnetismus.
∫∫
A =∂V
(
)
r r
r r
r
Q
1
E ⋅ dA = ∫∫∫ ∇ ⋅ E dV = ∫∫∫ ρ( r ) dV = innerhalb
ε0 V
ε0
V
Mit Hilfe des Theorems der Divergenz können wir eine fundamentale
Beziehung für ein endliches Volumen V herleiten.
Es gilt
φ tot ≡
wobei A die Oberfläche ist, die das Volumen V umschliesst, und Qinnerhalb ist die gesamte Ladung, die von der Oberfläche A eingeschlossen wird, oder die sich im Volumen V befindet.
Beispiel: Elektrisches Feld einer Punktladung
Das elektrische Feld, das von einer Punktladung Q erzeugt wird, die
sich im Ursprung des Koordinatensystems befindet, ist gleich
r
r r
1 Qr
1 Q
=
E (r ) =
( x, y, z )
4πε 0 r 2 r 4πε 0 r 3
r Q
ρ( r ) =
0
Die Ladung befindet sich im Ursprung des Koordinatensystems. Es
folgt, dass die Ladungsverteilung sich so verhält5:
r r
wenn r = 0 d .h . r = 0
r r
wenn r ≠ 0 d .h . r > 0
Punktladung:
5. Im Prinzip muss die Ladungsdichte eine Ladung pro Volumeneinheit sein. Deshalb ist die
Ladungsdichte einer Punktladung Q als die Ladung Q mal eine Funktion δ(r), so dass
ρ=Qδ(r).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Gauss sche Gesetz
Wir wollen deshalb prüfen, ob die Divergenz dieses Feldes verschwindet, wenn der Abstand r verschieden von Null ist.
Es gilt,
r r
∂E
∂ x ∂ y ∂ z
∂E
E
∂
1
y
Q + +
+ z=
∇⋅ E = x +
∂x
∂y
∂z
4πε 0 ∂x r 3 ∂y r 3 ∂z r 3
wobei
r 3 − 3rx 2
r6
3 2
3
2
2 1/ 2
r − x (x + y + z ) 2x
x
∂ x ∂
2
=
=
∂x r 3 ∂x ( x 2 + y 2 + z 2 ) 3 / 2
r6
=
Die Divergenz des Feldes ist dann
r 3 − 3rx 2 r 3 − 3ry 2 r 3 − 3rz 2
1
Q
+
+
4πε 0
r6
r6
r6
1 Q
(3r 3 − 3rx 2 − 3ry 2 − 3rz 2 )
4πε 0 r 6
=0
=
r r
∇⋅ E =
wie erwartet.
∫∫
A =∂V
523
11.7.2 Berechnung des elektrischen Feldes mit Hilfe des
Gauss’schen Gesetzes
ε0
Das Gauss’sche Gesetz für ein endliches Volumen lautet
r r
E ⋅ dA = Qinnerhalb
Physik
524
Elektromagnetismus
wobei A die Fläche ist, die das Volumen V umschliesst. Qinnerhalb ist
die gesamte Ladung, die sich im Volumen V befindet.
Für eine sehr symmetrische Ladungsverteilung können wir Oberflächen finden, bei denen der Betrag des elektrischen Feldes konstant ist
und das Feld senkrecht zur Oberfläche steht.
Der gesamte elektrische Fluss durch diese Oberfläche wird leicht
berechnet.
Beispiel: Elektrisches Feld einer geladenen Kugel mit Radius R und
Ladung Q
Wir haben in Kap. 2.6.4 hergeleitet, dass die Gravitationskraft der
Erde dieselbe ist, wie wenn ihre ganze Masse im Zentrum der Erde
konzentriert wäre.
Wir können nun beweisen, dass das elektrische Feld (ausserhalb)
einer homogen geladenen Kugel dasselbe ist, wie wenn die ganze
Ladung im Zentrum der Kugel konzentriert wäre.
Im Kap. 2.6.4 haben wir das Ergebnis durch eine lange Integration
gefunden (Siehe Kap. 2.6.2 und 2.6.3).
Hier werden wir das Gauss’sche Gesetz benutzen (das Gesetz gilt
natürlich auch für die Gravitationskraft!).
A
Wir nehmen eine kugelförmige Oberfläche A mit Radius r>R. Es gilt,
r r
r
ε 0 ∫∫ E ⋅ dA = ε 0 E ( 4πr 2 )
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Gauss sche Gesetz
Die gesamte Ladung innerhalb der Oberfläche A ist die Gesamtladung Q:
r
r
1 Q
gilt für r > R
ε 0 E ( 4πr 2 ) = Q ⇒ E ( r) =
4πε 0 r 2
11.7.3 Gesetz für das magnetische Feld
Im Kap. 11.2.2 haben wir schon erwähnt, dass man noch nie eine
“magnetische” Ladung (sogenannte Monopole) in der Natur beobachtet hat.
Es folgt, dass nie magnetischer Fluss erzeugt oder vernichtet wird. Es
gibt keine Punkte im Raum, an denen die magnetischen Feldlinien
anfangen oder enden.
Die Divergenz des magnetischen Feldes muss deshalb in jedem
Punkt des Raumes gleich null sein:
r r r
∇ ⋅ B( r ) = 0
Gesetz von Gauss für das magnetische Feld
Eine Folgerung daraus ist, dass der magnetische Fluss durch eine
geschlossene Oberfläche immer gleich null ist.
525
Diese Bedingung für die Divergenz des magnetischen Feldes
im jedem Punkt des Raumes entspricht einem zweiten fundamentalen Gesetz des Elektomagnetismus.
Beispiel: Magnetisches Feld eines langen geraden Leiters
Physik
526
Das Gauss sche Gesetz
z
y
Elektromagnetismus
i
B
und
Das magnetische Feld eines langen geraden Leiters.
x
Siehe Abb. 24 (Betrachte z.B. B(x,0,0), B(0,y,0), usw...)
2µ 0 I
4πr
Physik
wie erwartet.
Die Divergenz des magnetischen Feldes ist dann gleich
r r 2µ I
∇ ⋅ B = 0 4 (2 yx − 2 xy ) = 0
4πr
∂ x ∂ x 0 − x2 y
=
=
r4
∂y r 2 ∂y x 2 + y 2
∂ y
∂ y
0 − y2 x
− = − 2
=−
r4
∂x x + y 2
∂x r 2
Die partiellen Ableitungen sind
Figur 24.
Wir haben im Kap. 11.4.2 hergeleitet, dass das magnetische Feld
eines langen geraden Leiters gleich
B( r ) =
r2 = x 2 + y 2
ist, wobei I der Strom ist, der durch den Leiter fliesst, und r ist der
Abstand zwischen dem Leiter und dem betrachteten Punkt im Raum.
Siehe Abb. 13.
Wenn wir die Richtung des magnetischen Feldes einsetzen wollen,
können wir den magnetischen Feldvektor ausdrücken als
r
2
2
I
y
x
µ
µ I y x
B( x, y, z) = 0 − , , 0 = 0 − 2 , 2 , 0
4π r r
4πr r r
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
527
528
Elektromagnetismus
11.8 Stromdichte und
Ladungserhaltung
Wir betrachten ein Volumen V, das eine gesamte Ladung Q enthält.
V
V
r
Q ≡ ∫∫∫ dq = ∫∫∫ ρ( r ) dV
Die Ladungsverteilung wird durch die Ladungsdichte ρ(r) charakterisiert, so dass gilt
Siehe Kap. 11.4.
Wenn die gesamte Ladung, die im Volumen V enthalten ist, sich
ändert, muss ein Strom durch die Oberfläche des Volumens fliessen.
Dies ist so, weil die Ladung immer erhalten ist, und sie deshalb weder
erzeugt noch vernichtet werden kann. Um die gesamte Ladung innerhalb des Volumens zu ändern, müssen wir Ladungen hinzufügen oder
wegnehmen, und deshalb müssen wir die Ladungen bewegen.
=
Strom, der durch die Oberfläche
des Volumens fliesst
I ( t)
{
Die zeitliche Änderung der gesamten Ladung innerhalb des Volumens ist deshalb gleich dem Strom, der durch die Oberfläche des
Volumens fliesst:
dQ
−
dt
{
Zeitliche Ableitung
der Ladung innerhalb
des Volumens
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Stromdichte und Ladungserhaltung
Strom durch
die Oberfläche A
{I
A
Wir definieren nun die Stromdichte j(r) als eine Vektorgrösse, so
dass die Summe der Stromdichte über eine endliche Fläche A gleich
der gesamten Stromstärke ist, die durch die Fläche A fliesst:
r
r r
≡ ∫∫ j ( r ) ⋅ dA
Siehe Abb. 25.
r
2
=
A
m2
529
Die Stromdichte wird definiert als die Stromstärke pro Flächeneinheit. Die Stromstärke durch eine ebene Fläche dA ist gleich
r r
iA = j ⋅ dA
Einheit:
[Ladung] = C
[ j ] = [Zeit
][Fläche] s.m
Aus der Definition folgt, dass
r
r
r r
r
∂ρ( r )
dQ d
dV = − ∫∫ j ( r ) ⋅ dA
=
ρ( r ) dV = ∫∫∫
∂t
dt dt ∫∫∫
V
V
A =∂V
wobei A die Oberfläche des Volumens V ist.
Physik
530
Elektromagnetismus
i
j =
j
Querschnittsfläche d
i
d
Die Stromdichte ist gleich der
Stromstärke pro Flächeneinheit.
θ
j
dA
Stromstärke durch die Fläche dA
iA = j ⋅ dA
Figur 25. Stromdichte in einem Leiter. Die Stromstärke i fliesst durch den
Leiter. Die Stromstärke durch die Fläche A wird als das Skalarprodukt der
Stromdichte und des Flächenvektors definiert.
V
∫∫∫
Kontinuitätsgleichung
Mit Hilfe des Divergenz-Theorems, können wir diese Beziehung in
der folgenden Weise schreiben
r
r
r r r
r r
∂ρ( r )
dV = − ∫∫ j ( r ) ⋅ dA = − ∫∫∫ ∇ ⋅ j ( r ) dV
∂t
A =∂V
V
oder
r
∂ρ( r ) r r r
+ ∇ ⋅ j (r ) = 0
∂t
Diese Gleichung gilt in jedem Punkt des Raumes.
Sie sagt, dass wenn sich die Ladung in einem Punkt ändert, in diesem Punkt ein elektrischer Strom fliessen muss.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Stromdichte und Ladungserhaltung
Beispiel: Drei Ströme, die in 3 verschiedenen Leitern durch eine Fläche A fliessen.
Siehe Abb. 26.
Wir nehmen an, dass die 3 Leiter die Querschnitte A1, A2 und A3
besitzen und dass die Stromstärken i1, i2, und i3 sind. Wir defininieren
diese Stromstärke als positiven Grössen:
i1 > 0, i2 > 0 und i3 > 0
Wir müssen zuerst eine Richtung der Fläche wählen! Wir nehmen an,
dass die positive Richtung nach oben ist, wie es in der Abb. 26
gezeigt ist.
Diese Richtung definiert auch die Richtung der Ströme.
A
i3
A2
i2
A1
i1
Der gesamte Strom, der durch die Fläche A fliesst, ist dann gleich
r r r r
r r
r
r r
= ∫∫ j ( r ) ⋅ dA = j1 ⋅ dA1 + j2 ⋅ dA2 + j3 ⋅ dA3 = i1 + i2 − i3
I{
Strom durch
die Oberfläche A
A3
Fläche A
531
Figur 26. Drei Ströme, die in drei unterschiedlichen Leitern senkrecht
durch eine Fläche A fliessen. Die Richtung der Ströme ist in Rot gezeigt.
Physik
532
Das Linienintegral eines Feldes
Wir haben z.B. eine solche Integration benutzt, als wir die von einer
Kraft geleistete Arbeit eingeführt haben (Siehe Kap. 3.6.2).
Elektromagnetismus
11.9 Das Linienintegral eines Feldes
i
dr
B
Kurve C
Eine geschlossene Kurve C.
Siehe Abb. 29.
Physik
i
Fi
533
Wir beginnen mit der Bemerkung, dass eine beliebige Fläche immer
von einer geschlossenen Kurve eingeschlossen werden kann. Wir
definieren die Richtung der Fläche mit Hilfe der Rechte-Hand-Regel.
11.9.2 Theorem von Stokes
Figur 28.
wobei C eine geschlossene Kurve ist. Siehe Abb. 28.
C
∫ F .dr
11.9.1 Linienintegral über eine Kurve
i
dr i
Wenn wir einen geschlossenen Weg betrachten wie in Abb. 28
gezeigt, dann wird das Integral so bezeichnet
r r
r r
F .dr
Wir betrachten ein Vektorfeld F und wir sind am Integral des Feldes
über eine bestimmte Kurve C von einem Punkt A zu einem Punkt B
interessiert
B
A
∫
i
i
Das Ergebnis dieses Linienintegrals ist eine skalare Grösse, die die
Summe der einzelnen Skalarprodukte F.dr entlang der Kurve darstellt.
Fi
Linienintegral über die Kurve C.
Kurve C
Siehe Abb. 27.
A
Figur 27.
Das Linienintegral ist gleich der Summe
r r
i
∑ F ⋅ dr
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
534
Elektromagnetismus
Hier haben wir den Nabla-Operator mit dem Vektorprodukt benutzt,
um die Rotation des Feldes F zu definieren:
Das Linienintegral eines Feldes
(
)
(
)
r r
∂f r ∂f r ∂f r
G = ∇f = ex + ey + ez
∂z
∂y
∂x
r r
F
∂
F
∂
F
∂
y
d = ∇⋅ F = x +
+ z
∂x
∂y
∂z
r r r
Fy r
∂
F
∂
R = ∇× F ≡ z −
e −
∂y
∂z x
∂Fz ∂Fx r ∂Fy ∂Fx r
−
−
e +
e
∂x
∂y z
∂z y ∂x
Wir bestimmen die Rotation dieses elektrischen Feldes.
Physik
535
Das elektrische Feld, das von einer Punktladung Q erzeugt wird, die
sich im Ursprung des Koordinatensystems befindet, ist gleich
r
r
r
Q x y z
1 Qr
E (r ) = E x , E y , E z =
=
, ,
4πε 0 r 2 r 4πε 0 r 3 r 3 r 3
Beispiel: Rotation des elektrischen Feldes einer Punktladung
Rotation (Vektorgrösse):
Divergenz (Skalargrösse):
Gradient (Vektorgrösse):
Schliesslich haben wir drei Grössen mit Hilfe des Nabla-Operators
eingeführt:
(Beachte das negative Vorzeichen!).
r r ∂F ∂Fy r ∂Fz ∂F r ∂Fy ∂F r
− x ez
∇× F ≡ z −
− x ey +
e −
∂z
∂x
∂y
∂y
∂z x ∂x
Das Theorem von Stokes setzt das Linienintegral über die geschlossene Kurve C mit dem Flächenintegral über die Fläche A in Beziehung.
A
Es sagt, dass das Linienintegral eines Feldes F über eine geschlossene
Kurve C gleich dem Flächenintegral der Rotation des Feldes über die
Fläche A ist, wobei A von C umgerandet wird, ist, d.h.:
r r
r r
r
F .dr = ∫∫ ∇ × F ⋅ dA
Theorem von Stokes
∫
C =∂A
F ist ein Vektorfeld und A eine beliebige Fläche; C ist die geschlossene Kurve, die die Fläche A einschliesst.
Fläche A
Positive Richtung
Kurve C
Figur 29. Eine Fläche A kann immer von einer geschlossenen Kurve C
eingeschlossen werden. Die Richtung der Fläche ist durch die RechteHand-Regel gegeben.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
536
Elektromagnetismus
Wir beginnen mit der x-Komponente der Rotation:
3 2
2
2 1/ 2
0 − z (x + y + z ) 2y
3
∂ z ∂
z
zy
2
=− 5
=
=
∂y r 3 ∂y ( x 2 + y 2 + z 2 ) 3 / 2
r6
r
3 2
2
2 1/ 2
0 − y ( x + y + z ) 2z
∂
3 yz
∂ y
y
2
=− 5
=
=
∂z r 3 ∂z ( x 2 + y 2 + z 2 ) 3 / 2
r6
r
und deshalb
∂E z ∂E y r 3zy 3zy r
−
+ 5 ex = 0
e = −
r
∂y
∂z x r 5
Mit einer ähnlichen Herleitung für die anderen zwei Komponenten
können wir beweisen, dass die Rotation des elektrischen Feldes einer
Punktladung in jedem Punkt des Raumes verschwindet:
r r
E
E
∂
∂
E
E
∂
∂
r
∂
E
∂
E r
y
yr
z
− x ez = 0
∇× E ≡ z −
− x ey +
e −
∂z
∂x
∂y
∂y
∂z x ∂x
Man spricht von der “Wirbelfreiheit” des elektrischen Feldes.
(
)
11.9.3 Rotation des Feldes und konservative Felder
A
Wir konnten die elektrische potentielle Energie und das elektrische
Potential definieren, weil die Arbeit, die benötigt wird, um eine
Ladung q von einem Punkt A zum Punkt B entlang des Weges S zu
bewegen, unabhängig vom Weg S ist (siehe Kap. 11.5.1):
B r r
r
r
W AB = q ∫ E .dr ≡ − E pot ( rB ) − E pot ( rA )
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Linienintegral eines Feldes
d.h. dass die Arbeit nur vom Anfangs- und Endpunkt abhängt. Sie
kann deshalb als Unterschied der potentiellen Energie zwischen
Punkt A und B geschrieben werden.
Wir haben gesehen, dass die Rotation des Feldes, das von einer
Punktladung erzeugt wird, in jedem des Raumes gleich null ist:
r r
in jedem Punkt des Raumes
(∇ × E )( x, y, z) = 0
(
)
Es folgt, dass das Flächenintegral der Rotation eines solchen Feldes
über eine beliebige Fläche gleich null ist:
r r
r
r r
wenn ∇ × E ( x, y, z) ≡ 0
A
∫∫ (∇ × E ) ⋅ dA = 0
Mit Hilfe des Theorems von Stokes finden wir
r r
r
r r
E .dr = 0
A
C =∂A
∫∫ (∇ × E ) ⋅ dA = ∫
⇒
C
Zusammenfassend haben wir bewiesen, dass wenn die Rotation des
Feldes in jedem Punkt des Raumes verschwindet, das Linienintegral
des Feldes über eine beliebige geschlossene Kurve gleich null ist:
r r
r r
∫ E .dr = 0
(∇ × E )( x, y, z) ≡ 0
r r
B
r r
entlang Weges S
A
.dr
∫ E .dr = 12
∫4E4
3
C
+
A
B
r r
E .dr
∫12
4 4
3
entlang Weges S ′
=0
537
Die geschlossene Kurve C kann in zwei Teile S und S’ getrennt werden:
Physik
538
Elektromagnetismus
Es folgt, dass wenn die Rotation des Feldes in jedem Punkt des Raumes verschwindet, das Linienintegral des Feldes vom Punkt A zum
Punkt B vom Weg unabhängig ist.
r
r r
r
⇒ E ( r ) ≡ −∇V ( r )
In diesem Fall ist das Feld konservativ (oder ein Potentialfeld) und
wir können die entsprechende potentielle Energie oder das Potential
definieren:
r
(∇ × E ) ≡ 0
wobei V(r) das elektrische Potential ist.
11.10 Das Ampèresche Gesetz
2µ 0 I
4πr
Wir betrachten das magnetische Feld eines langen geraden Leiters.
Der Betrag des magnetischen Feldes ist (siehe Kap. 11.4.2)
B( r ) =
wobei I der Strom ist, der durch den Leiter fliesst, und r ist der
Abstand zwischen dem Leiter und dem betrachteten Punkt im Raum.
Siehe Abb. 14.
Wir bestimmen das Linienintegral des magnetischen Feldes entlang
einer Kreiskurve mit dem Radius R um den Leiter.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das Amp resche Gesetz
Siehe Abb. 30.
R
i
Bi
dr i
Figur 30. Gesetz von Ampère. Wir bestimmen das Linienintegral des Feldes
über den geschlossenen Kreis mit Radius R. Wir bemerken, dass der Strom
nach “oben” fliesst und deshalb das B-Feld gegen dem Uhrzeigersinn zeigt.
2µ I
0
C
2µ 0 I
In allen Punkten auf dem Kreis ist die Strecke dr immer tangential
zum Integrationsweg. Das Feld B und die Stecke dr sind immer parallel zueinander.
Es gilt,
r r
C
0
∫ B.dr = ∫ Bdr = 4πR ∫ dr = 4πR (2πR) = µ I
C
539
d.h. das Linienintegral des Feldes ist zur Stromstärke proportional.
Das ist das Ampèrsche6 Gesetz. Es gilt für jede mögliche Anordnung
von (stationären) elektrischen Strömen und für jeden Integrationsweg.
6. A. Ampère (1775-1836).
Physik
540
Elektromagnetismus
A
(
)
A
Es folgt mit Hilfe des Theorems von Stokes, dass
r r
r r
r
r r
B.dr = ∫∫ ∇ × B ⋅ dA = µ 0 I = ∫∫ µ 0 j ⋅ dA
∫
C =∂A
Weil diese Beziehung für eine beliebige Fläche gilt, muss in jedem
Punkt des Raumes gelten:
r r
r
0
(∇ × B)(rr) = µ j (rr)
Gesetz von Ampère für das magnetische Feld
wobei j(r) die Stromdichte und µ0 die magnetische Feldkonstante ist.
Wie im Fall des Gesetzes von Gauss, kann das Gesetz von Ampère
benutzt werden, um das magnetische Feld zu bestimmen, wenn die
geometrische Anordnung der Störme zu einer Symmetrie des Feldes
führt. Man sucht in diesem Fall eine Kurve, für die das Linienintegral
sich einfach als das Produkt des Feldes und der Länge schreiben lässt.
Wir erinnern uns daran, dass die Richtung der Fläche A durch die
Rechte-Hand-Regel gegeben ist.
Das Amp resche Gesetz
i2
Kurve C
Fläche A
Illustration zum Gesetz von Ampère.
zu bestimmen.
Figur 31.
B
dr
i1
Wir wickeln einen isolierten Draht in dicht nebeneinanderliegenden
Windungen auf. Wir erhalten eine zylindrische Spule, die als Solenoid bezeichnet wird.
Beispiel: Das Solenoid
Wenn viele Ströme durch die Fläche fliessen, müssen sie mit dem
richtigen Vorzeichen addiert werden.
Die Länge der Spule soll relativ zu ihrem Durchmesser gross sein.
Siehe Abb. 29.
Siehe Abb. 31.
(i1 > 0, i2 > 0)
541
In der Abb. ist die gesamte Stromstärke als
I tot = i1 − i2
Physik
In Punkten nahe einer einzelnen Windung ist das magnetische Feld
fast gleich demjenigen eines geraden Leiters. Die Feldlinien bilden
konzentrische Kreise um diese Windung. Die Felder aller Windungen
der Spule addieren sich vektoriell zu einem Gesamtfeld.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
542
Elektromagnetismus
i
Siehe Abb. 32.
d
h
L
n = N/L ist
gleich der
Zahl der
Windungen
pro
Längeneinheit
Das magnetische Feld eines Solenoids.
N Windungen
Figur 32.
i
B
Im Innenrn der Spule resultiert ein paralleles Feld, welches bei einer
sehr eng gewickelten Spule tatsätchlich homogen ist.
Wir betrachten die blaue Kurve für die Integration des Feldes. Es gilt
r r
r
Nh
⇒ B ≈ µ 0 In
0
L
∫ B.dr ≈ Bh = µ I
C
wobei n=N/L die Zahl der Windungen pro Längeneinheit ist.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Maxwellsche Gleichungen
11.11 Maxwellsche Gleichungen
Die Maxwellschen Gleichungen beschreiben die Dynamik elektrischer und magnetischer Felder.
Sie haben für die Elektrodynamik eine ähnliche Bedeutung wie die
Newtonschen Axiome für die klassische Mechanik.
Die Gleichungen setzen die Felder mit ihren Quellen in Beziehung.
Im Prinzip können alle elektromagnetischen Phänomene mit Hilfe
dieser Gleichungen erklärt werden. In der Praxis ist die Lösung der
Maxwellschen Gleichungen oft schwierig, und in diesen Fällen sucht
man numerische Lösungen der Gleichungen.
Die Maxwellschen Gleichungen fassen in einer kompakten
mathematischen Formulierung die beiden Gesetze von
Gauss für das elektrische und das magnetische Feld sowie
das Gesetz von Ampère zusammen.
(
)
r r
∇⋅ B = 0
r
r r
r
E
∂
∇ × B = µ 0 j + ε 0µ 0
∂t
Maxwellsche Gleichungen
543
Zusätzlich wurden auch das sogenante Gesetz von Faraday
und eine Erweiterung des Gesetzes von Ampère, die mit der
zeitlichen Änderung der Felder zu tun hat, von Maxwell
hinzugefügt.
)
Die Maxwellsche Gleichungen:
(
r r
ε0 ∇ ⋅ E = ρ
r
r r
B
∂
∇× E = −
∂t
wobei ρ(r,t) die Ladungsdichte und j(r,t) die Stromdichte ist.
Physik
544
Elektromagnetismus
Diese Gleichungen gelten in jedem Punkt des Raumes.
(
)
(
)
Zeitunabhängige Maxwellsche Gleichungen
0
Im Fall der Elektrostatik oder Magnetostatik sind die Felder von der
Zeit unabhängig, und die Gleichungen vereinfachen sich zu:
r r
r r
ε0 ∇ ⋅ E = ρ ∇ ⋅ B = 0
r r
r r
r
∇× E = 0
∇× B = µ j
(
)
)
Diese Gleichungen gelten für stationäre Ströme.
(
Wir erkennen in diesen Gleichungen die Gesetze, die wir schon in
den vorherigen Kapiteln studiert haben:
r r
ε 0 ∇ ⋅ E = ρ
Gesetze von Gauss
r r
∇ ⋅ B = 0
r r
r
∇× E = 0
konservatives Feld ⇒ E = −∇V
r r
r
∇ × B = µ0 j
Gesetz von Ampère
Was wir nun studieren wollen, sind die zeitabhängigen Teile der Gleichungen, nämlich
r
r r
∂B
∇ × E = −
∂t
r
∂E
r r
∇ × B = ε 0µ 0 ∂t
Aus diesen Gleichungen folgt eine sehr wichtige physikalische
Regel:
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gesetz von Faraday (Induktionsgesetz)
Ein zeitveränderliches magnetisches (bez. elektrisches) Feld
erzeugt ein elektrisches (bez. magnetisches) Feld.
11.12 Gesetz von Faraday
(Induktionsgesetz)
11.12.1 Die induzierte Spannung
Dass eine elektrische Spannung (die Induktionsspannung) durch
die Änderung eines magnetischen Feldes durch eine Leiterschleife
erzeugt wird, beobachteten zuerst im Jahr 1830 Faraday und Henry7.
Man sagt, dass eine Spannung induziert wird.
Experiment: Grundversuch der Induktion - Drahtschleife und Stabmagnet
Experiment: Induktion im Erdfeld
545
Die elektrische Spannung ist gleich dem Potentialunterschied zwischen zwei Punkten:
r
r
U AB ≡ V ( rA ) − V ( rB )
7. M. Faraday (1791-1867), J. Henry (1797-1878).
Physik
546
Elektromagnetismus
U
+
–
Siehe Abb. 33.
Volt
meter
2
1
r1
r2
Figur 33. Ein Voltmeter misst den Potentialunterschied zwischen zwei
Punkten. Die gestrichelten Linien sind die Äquipotentiallinien, d.h. die
Linien gleichen Potentials.
Einheit: Die Einheit der Spannung ist das Volt (d.h. dieselbe wie die
des Potentials).
Die Spannung wird definiert als Arbeit pro Ladung
r
r
r
r
U AB ≡ V ( rA ) − V ( rB ) = −(V ( rB ) − V ( rA ))
r
r
E pot ( rB ) − E pot ( rA ) W AB
=
q
q
=−
Wir betrachten eine Leiterschleife in einem magnetischen Feld. Wir
nehmen an, dass sich das Feld mit der Zeit ändert. Eine Induktionsspannung wird erzeugt.
Siehe Abb. 34.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gesetz von Faraday (Induktionsgesetz)
Wenn sich eine Ladung in der Schleife befindet, muss aufgrund der
Induktionsspannung eine Kraft auf sie wirken.
A
∫
q
A
B r
r
= ∫ E ⋅ dr
Die Kraft wirkt aufgrund des elektrischen Feldes, das wegen der
Änderung des magnetischen Feldes erzeugt wird:
r
r
F = qE
W AB
=
q
Die von dem Feld geleistete Arbeit ist
B r
r
F ⋅ dr
U AB =
Das Linienintegral des elektrischen Feldes über die geschlossene
Schleife ist deshalb gleich der Induktionsspannung:
r r
U induziert = ∫ E ⋅ dr
Bisher haben wir elektrische Felder betrachtet, die durch elektrische
Ladungen erzeugt wurden.
(∇ × E ) ≡ 0
⇒
C
547
Das Linienintegral über eine geschlossene Kurve von solchen elektrostatischen Feldern verschwindet immer:
r r
r r
∫ E .dr = 0
Physik
548
Elektromagnetismus
E q
E dr
+
_
A
B
UAB
Figur 34. Die in der Schleife induzierte Spannung ist gleich dem
Linienintegral des elektrischen Feldes über die Schleife.
Solche Felder haben wir als konservativ bezeichnet (Siehe
Kap. 11.9.3).
r
r
(
r
)
C =∂A
r r
E .dr = U induziert
Im Fall der Induktionsspannung ist das Linienintegral nicht gleich
null, und es gilt
r
r
r r
r r
r
r r
d
∂B r
∂B
⋅ dA = − ∫∫ B ⋅ dA
⇒ ∫∫ ∇ × E ⋅ dA = − ∫∫
∇× E = −
dt A
∂t
∂t
A
A
Weil
A
∫∫ (∇ × E ) ⋅ dA = ∫
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
r r
r r
dφ
d
E .dr = − ∫∫ B ⋅ dA = − B
dt
dt A
Gesetz von Faraday (Induktionsgesetz)
∫
C =∂A
folgt das Induktiongesetz
U induziert =
wobei φB der magnetische Fluss durch die Fläche A ist, und C ist die
Kurve, die die Fläche A einschliesst.
Wenn wir das Faradaysche Gesetz auf eine Schleife mit N Windungen
anwenden, so wird in jeder der Windungen eine Spannung induziert,
weil der magnetische Fluss durch jede Windung gleich gross ist.
dφ B
dt
Die induzierte Spannung ist in diesem Fall gleich
U induziert = − N
Nun müssen wir etwas über das Vorzeichen der induzierten Spannung
sagen.
Wir bemerken, dass die induzierte Spannung ein negatives Vorzeichen
besitzt.
Siehe Abb. 35.
r
r r
B
∂
∇× E = −
∂t
549
Das negative Vorzeichen kommt vom Vorzeichens in der Maxwellschen Gleichung:
Physik
550
Elektromagnetismus
Positive
Richtung
B
nimmt nach
oben,zu
E
∂B
∇× E =−
∂t
Rechte-Hand-Regel
Figur 35. Die Richtung des induzierten Stromes (in Richtung vom E-Feld).
Das magnetische Feld zeigt nach oben und nimmt mit der Zeit zu.
Wir nehmen an, dass ein nach unten gerichtetes magnetisches Feld
mit der Zeit abnimmt. Die zeitliche Ableitung des magnetischen
Feldvektors zeigt nach oben.
Gesetz von Faraday (Induktionsgesetz)
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
E
∂B
∂t
X
X
X
X
X
X
E
induziertes
elektrisches
Feld
∇ × B = µ0 j
i
nach oben
gerichteter Strom
nach oben
gerichtet
B
Magnetisches Feld
um den Strom
Im Gegensatz dazu erzeugt ein nach oben gerichteter Strom ein
magnetisches Feld, das gegen den Uhrzeigersinn zeigt
X
X
X
X
nach unten gerichtetes
magnetisches Feld, das mit der Zeit
abnimmt (Die zeitliche Änderung
zeigt nach oben)
E
∇× E =−
nach oben
gerichtet
Figur 36. Richtung der induzierten Spannung. Ein nach unten gerichtetes
magnetisches Feld nimmt mit der Zeit ab. Seine zeitliche Ableitung zeigt
nach oben. Wegen dem negativen Vorzeichen zeigt das induzierte
elektrische Feld im Uhrzeigersinn. Im Fall des Gesetzes von Ampère
erzeugt ein nach oben gerichteter Strom ein magnetisches Feld, das gegen
den Uhrzeigersinn zeigt.
11.12.2 Das Ohmsche Gesetz
551
Wir haben in Kap. 11.3 gesehen, dass die Driftgeschwindigkeit der
beweglichen Elektronen in einem Leiter proportional zum elektrischen Feld ist:
wobei µ die Beweglichkeit der Elektronen ist.
r
r
v D = −µE
Wegen dem negativen Vorzeichen zeigt das induzierte elektrische
Feld im Uhrzeigersinn.
Physik
Siehe Abb. 36.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
552
Elektromagnetismus
Gesetz von Faraday (Induktionsgesetz)
Physik
I = jA
jA = σ
A
A
LE ⇒ I = σ U
L
L
553
Wenn die Leiterschleife einen geschlossenen Stromkreis bildet, werden sich die beweglichen Elektronen in der Schleife bewegen. Man
spricht von induziertem Strom.
Wir betrachten eine Leiterschleife, in welcher eine elektrische Spannung induziert wird. Bisher haben wir diese Spannung mit Hilfe eines
Voltmeters gemessen.
11.12.3 Der induzierte Strom
wobei R der Widerstand des Leiters ist. Das Gesetz gilt für alle
Metalle. Wir bemerken, dass der Widerstand von der Temperatur des
Leiters abhängt. Er nimmt mit der Temperatur zu.
L
U = RI = I
σA
Dieses Ergebnis entspricht dem Ohmschen Gesetz:
j = σE ⇒
wobei L die Länge des Leiters ist. Es folgt,
Es gilt
Ein elektrisches Feld im Leiter wird erzeugt, wenn wir an die Enden
des Leiters eine elektrische Spannung anlegen. Das elektrische Feld
wird in allen Punkten des Leiters konstant sein, und deshalb ist auch
die Stromdichte konstant.
⇒
−1
r r
U = ∫ E ⋅ dr = ∫ Edr = EL
Wir betrachten einen Leiter vom Querschnitt A, durch welchen ein
konstanter Strom der Stromstärke I fliesst. Es gilt (Siehe Kap. 11.3)
r
r
r
r I
j = = (enµ ) E = σE
A
r
r
r
I = qnAv D = −(− e) nAµE
wobei σ die Leitfähigkeit des Leiters ist. Die Stromdichte ist zum
elektrischen Feld proportional.
A
Einheit: Weil das Linienintegral des elektrischen Feldes
B r
r
U AB = ∫ E ⋅ dr
die Einheit einer Spannung besitzt, kann die Einheit des elektrischen
Feldes als V/m ausgedrückt werden:
r
[ E ] = NC = Vm
[E]
[]
Die Einheit der Leitfähigkeit ist dann
r
j
A / m2
A
r =
=
V / m Vm
[σ ] =
V
A
Das Verhältnis V/A wird als Ohm bezeichnet:
Ohm Ω =
(Ωm) −1
= 6 × 10 7 (Ωm)
Man spricht von der Leitfähigkeit von Materialien: z.B.
σ
Kupfer
σ Quarz = 10 −16
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
554
Elektromagnetismus
Im Fall der Metalle können wir das Ohmsche Gesetz benutzen:
1 dφ B
I induziert = U induziert / R = −
R dt
für einen geschlossenen Stromkreis
wobei R der Widerstand des Stromkreises ist.
Lenzsche Regel: Lenz8 beobachtete, dass
die induzierten Ströme so gerichtet sind, dass sie ihrer Ursache, d.h. der Änderung des magnetischen Flusses, entgegenwirken.
(Diese Beobachtung folgt aus der Energieerhaltung.)
Wir betrachten z.B. eine Leiterschleife, die sich im magnetischen
Feld befindet.
Siehe Abb. 37
Wir nehmen an, dass das magnetische Feld zunimmt. Der induzierte
Strom ist gegen den Uhrzeigersinn gerichtet.
Der induzierte Strom erzeugt selbst ein magnetisches Feld (die sogenannte Selbstinduktion)!
Das “induzierte” magnetische Feld Bind schwächt den magnetischen
Fluss durch die Schleife:
r
r
∂B
sind entgegengesetzt
Bind und
∂t
8. H.F. Lenz (1804-1865).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gesetz von Faraday (Induktionsgesetz)
induziertes magnetisches Feld
Lenzsche Regel.
induziertes magnetisches Feld
Figur 37.
Physik
B
B
Das Feld nimmt zu!
∂B
∂t
induzierter Strom
Das Feld nimmt ab!
∂B
∂t
induzierter Strom
555
556
Elektromagnetismus
11.12.4 Induktion durch Bewegung
Wir betrachten einen Leiterstab, der sich in einem magnetischen Feld
bewegt. Eine Spannung wird induziert.
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
h
V
Experiment: Induktion durch Verschiebung eines Drahtes im
Magnetfeld.
Siehe Abb. 38.
v
X
x
X
nach unten
gerichtetes magnetisches
Feld
Figur 38. Ein Stab bewegt sich in einem magnetischen Feld, das nach unten
senkrecht zur Blattebene zeigt.
A
Der magnetische Fluss durch den geschlossenen Stromkreis ist gleich
r r
φ B = ∫∫ B ⋅ dA = Bhx
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Gesetz von Faraday (Induktionsgesetz)
Der Stab bewegt sich mit der Geschwindigkeit v. Die Fläche des
Stromkreises nimmt mit der Zeit zu:
dx
dφ B d
= Bhx = Bh
= Bhv
dt
dt
dt
U induziert = −
dφ B
= − Bhv
dt
557
Die Änderung des Flusses sowie der induzierte Strom hängen von der
Geschwindigkeit ab:
Physik
558
Elektromagnetismus
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 12
Elektromagnetische
Wellen
12.1 Felder eines bewegten geladenen
Drahtes
( unendlicher Stab)
Wir haben in Kap. 11.4.1 das elektrische Feld berechnet, das von
einem unendlich langen, geladenen Stab erzeugt wird. Das Feld ist
radial und hängt umgekehrt proportional vom Abstand r des Stabes
ab:
r
2λ 1
E ≈
4πε 0 r
wobei λ die Linienladungsdichte ist.
559
Wir betrachten einen positiv geladenen Stab. Das erzeugte elektrische
Feld ist in Abb. 1 gezeigt.
Physik
560
Elektromagnetische Wellen
+
+
+
+
+
+
+
+
+
+
Figur 1. Das radiale elektrische Feld, das von einem unendlich langen,
geraden, positiv geladenen Draht erzeugt wird.
Wir nehmen nun an, dass die positiven Ladungen zur Zeit t=0 anfangen, sich mit einer Geschwindigkeit VD zu bewegen. Zur Zeit t=t1
hält der Draht wieder an. D.h. der Draht bewegt sich während des
Zeitintervalls zwischen t=0 und t=t1.
Wie wird die räumliche Verteilung des elektrischen Feldes sein?
Felder eines bewegten geladenen Drahtes
Es folgt daraus, dass das Verhalten des elektrischen Feldes wie in
Abb. 2 gezeigt ist.
vt
t > t1
+
+
+
+
+
+
+
+
+
+
v(t–t1)
Für Abstände kleiner als v(t-t1) entsprechen die Feldlinien der
neuen Position des Drahtes.
In den Punkten mit Abständen grösser als vt entsprechen die elektrischen Feldlinien noch dem Draht, bevor es sich bewegte.
Zwischen den Abständen vt und v(t-t1) ändern sich die Feldlinien.
Die Ausbreitung der Änderung des Feldes verhält sich wie ein Puls,
der sich mit einer Geschwindigkeit v bewegt:
1.
2.
3.
+
VD +
+
+
+
+
t>0 +
+
+
+
Figur 2. Der positiv geladene Draht bewegt sich zwischen der Zeit t=0 und
t=t1. Ein Puls, der sich mit einer Geschwindigkeit v ausbreitet, wird
erzeugt.
vt
Die Relativitätstheorie sagt voraus, dass die Information, dass der
Draht sich bewegt, sich nicht schneller als mit Lichtgeschwindigkeit
ausbreiten kann.
Wir nehmen nun eine Anordnung an, in der zwei Drähte sich nebeneinander befinden. Einer ist positiv geladen und der andere ist mit
derselben Ladung, aber negativ geladen. Die elektrostatischen Felder
Die elektrischen Feldlinien müssen den Ladungen folgen. Sie
müssen immer bei den positiven Ladungen beginnen. Aber
das Feld kann sich nicht gleizeitig und spontan in allen Punkten des Raumes ändern!
Wir nehmen deshalb an, dass die Änderung des Feldes sich mit einer
Geschwindigkeit v durch den Raum ausbreitet, wobei die
Geschwindigkeit v später bestimmt wird.
Physik
561
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
562
Elektromagnetische Wellen
E+ und E– der Drähte werden sich kompensieren und das resultierende elektrostatische Feld verschwindet in jedem Punkt des Raumes.
Der positiv geladene Draht bewegt sich nun mit der Geschwindigkeit
VD zwischen den Zeiten t=0 und t=t1. Der negativ geladene Draht
ruht.
+
+
+
+
+
+
+
+
+
+
Die elektrischen Felder der einzelnen Drähte sind in Abb. 3 gezeigt.
Ein Puls, der von der Bewegung der positiven Ladungen erzeugt
wird, wird sich ausbreiten.
–
–
–
–
–
–
–
–
–
–
Figur 3. Die elektrischen Felder zweier geladener, paralleler Drähte. Der
positiv geladene Draht bewegt sich während dem Zeitintervall t=0 und t=t1.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Felder eines bewegten geladenen Drahtes
Das resultierende elektrische Feld ist die Vektorsumme der elektrischen Felder der positiv, respektive negativ geladenen Drähte:
r r
r
E = E+ + E−
E
E–
E+
E+
E–
E
v
Es verschwindet in jedem Punkt des Raumes ausserhalb des Pulses.
E–
Siehe Abb. 4.
–
+
E+
Figur 4. Das resultierende Feld. Die elektrischen Felder, die von den
positiven und negativen Ladungen erzeugt werden, kompensieren einander
in jedem Punkt des Raumes ausserhalb des Pulses, der sich mit der
Geschwindigkeit v bewegt.
Es folgt daraus, dass
ein Strom, der während einem Zeitintervall nach oben gerichtet fliesst, ein nach unten gerichtetes elektrisches Feld erzeugt.
Das elektrische Feld verhält sich wie ein “Puls”, der sich mit
einer Geschwindigkeit v radial ausbreitet.
563
Natürlich wissen wir aus der Elektrodynamik, dass ein sich veränderndes elektrisches Feld ein magnetisches Feld erzeugt.
Wie muss sich in diesem Fall das magnetische Feld verhalten?
Physik
564
Elektromagnetische Wellen
Nach den Maxwellschen Gleichungen gilt
r
r r
E
∂
∂
∂
= ε 0µ 0 ( E x , E y , E z ) = ε 0µ 0 (0, 0, E z )
∇ × B = ε 0µ 0
∂t
∂t
∂t
wobei wir die z-Koordinate entlang des Drahtes angenommen haben.
Es folgt,
∂
(0, 0, E z )
∂t
r r
B
B
∂
∂
B
B
∂
∂
r
B
B r
∂
∂
y
yr
z
− x ez
∇× B = z −
− x ey +
e −
∂z
∂x
∂y
∂y
∂z x ∂x
= ε 0µ 0
unabhängig von x, y − Koordinaten
⇒ z − Komponente
unabhängig von z − Koordinate
⇒ x und y − Komponente
Wir bemerken, dass die x- und y-Komponenten der Rotation des Feldes verschwinden. Wir nehmen deshalb an, dass
∂Bx ∂By
=
=0
∂z
∂z
∂Bz ∂Bz
=
=0
∂x
∂y
Dass die x- und y-Komponenten des Feldes unabhängig von der zKoordinate sind, wird erwartet, weil wir den Draht entlang der zKoordinate angenommen haben. Das Problem ist deshalb entlang der
z-Koordinate symmetrisch.
Die z-Komponente des Feldes ist unabhängig von x und y, d.h. vom
Abstand r. Sie muss verschwinden:
Bz = 0
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Felder eines bewegten geladenen Drahtes
Eine Lösung, die diese Bedingungen erfüllt, hat die Feldlinien des
magnetischen Feldes in konzentrischen Kreisen um den Draht:
r
y x
B( x, y, z, t) = B0 ( x, y, t) − , , 0
r r
B
E
v
v
wobei B0 eine Konstante ist, die bestimmt werden muss.
Siehe Abb. 5.
v
v
E
565
Figur 5. Elektromagnetischer Puls, der erzeugt wird, wenn ein Strom
während eines kurzen Zeitintervalls durch den geraden Leiter fliesst. Der
Puls breitet sich mit der Geschwindigkeit v radial aus.
Physik
566
Elektromagnetische Wellen
Ein elektromagnetischer Puls, der einen elektrischen und
einen magnetischen Teil enthält, wird deshalb erzeugt, wenn
ein Strom während eines kurzen Zeitintervalls durch einen
geraden Leiter fliesst. Der elektromagnetische Puls breitet
sich mit einer Geschwindigkeit v radial aus.
Die elektrischen und magnetischen Felder zeigen senkrecht
zur Ausbreitungsrichtung des Pulses .
⇒
A
r
r
C
r r
∂
E .dA =
∂t ∫∫
A
r
0
r r
0
∫∫ (∇ × B) ⋅ dA = ∫ B.dr = ε µ
0
r r
d
E ⋅ dA
dt ∫∫
A
Um die Beziehung zwischen den Feldern zu bestimmen, betrachten
wir ein Linienintegral des magnetischen Feldes.
Siehe Abb. 6.
Es gilt,
r
r r
E
∂
∇ × B = ε 0µ 0
∂t
Wir bemerken, dass
r r
0
∂
dr
( Ehr) = ε 0µ 0 Eh = ε 0µ 0 Ehv
∂t
dt
∫ B.dr = Bh = ε µ
C
= ε 0µ 0
wobei v die Ausbreitungsgeschwindigkeit des Pulses ist.
Es folgt, dass die Beträge der Felder nur von der Feldkonstanten und
der Ausbreitungsgeschwindigkeit abhängen:
r
r
1 r v r
B = (ε 0µ 0v ) E = ε 0
v E = 2 E
c
ε 0c 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Felder eines bewegten geladenen Drahtes
B
r
v
Integrationskurve
Wir bemerken, dass der Betrag des magnetischen Feldes um den Faktor v/c2 kleiner ist, als der Betrag des elektrischen Feldes.
h
E geht in die
v Blattebene hinein
567
Figur 6. Integrationskurve für die Bestimmung des magnetischen Feldes.
Das elektrische Feld geht in der Blattebene hinein. Der elektromagnetische
Puls breitet sich mit der Geschwindigkeit v aus.
Physik
568
Elektromagnetische Wellen
12.2 Die elektromagnetischen Wellen
Die Maxwellschen Gleichungen sagen die Existenz der elektromagnetischen “Wellen” voraus.
Maxwell hat im Jahr 1865 diese Existenz vorhergesagt.
Hertz1 hat erst 20 Jahre später einen experimentellen Nachweis der
elektromagnetischen Wellen erbracht.
Im Allgemeinen werden elektromagnetische Wellen erzeugt,
wenn geladene Teilchen beschleunigt werden.
12.2.1 Die Wellengleichung und die
Ausbreitungsgeschwindigkeit
)
)
Wir beginnen mit den Maxwellschen Gleichungen im Vakuum (d.h.
die Ladungsdichte ρ=0 und die Stromdichte j=0)
r
r r
∂B
∇ × E = −
∂t
r
∂E
r r
∇ × B = ε 0µ 0
∂t
(
(
Wir bilden die Rotation der beiden Gleichungen:
r
r ∂B
r r r
∂ r r
= − ∇× B
∇ × ∇ × E = −∇ ×
∂t
∂t
r
r ∂E
∂ r r
r r r
∇× E
= ε 0µ 0
∇ × ∇ × B = ε 0 µ 0∇ ×
∂t
∂t
1. H. Hertz (1857-1894).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die elektromagnetischen Wellen
Nun benutzen wir eine mathematische Beziehung für ein beliebiges
Vektorfeld F:
(
)
( ) (
)
r
r r
r r
r r r
∇ × ∇ × F = ∇ ⋅ ∇F − ∇ ⋅ ∇ F
)
)
Laplace − Operator
wobei der Laplace-Operator (eine Skalargrösse) ist gegeben durch
r r r
∂2
∂2
∂2
∇ ⋅ ∇ = ∇2 = 2 + 2 + 2
∂z
∂y
∂x
(
(
Es folgt,
r
r
2
r r
r r r r r r
∂
∂
∂
∂
E
E
= −ε 0µ 0 2
εµ
∇ ⋅ ∇ ⋅ E − ∇ ⋅ ∇ E = − ∇ × B = −
{
{
∂t
∂t
∂t 0 0 ∂t
= 0 ∇r 2
r
∂2B
∂ r r
r r r r r
⋅ B − ∇
⋅ ∇ B = ε 0µ 0
∇ × E = −ε 0µ 0 2
{
{
∇ ⋅ ∇
r
∂t
∂t
=0 ∇ 2
oder die Wellengleichungen der elektromagnetischen Wellen
r
r
r r
r r
∂2B
∂2 E
∇ 2 B = ε 0µ 0 2
und
∇ 2 E = ε 0µ 0 2
∂t
∂t
569
Diese vektoriellen Gleichungen entsprechen einem System von 6
Gleichungen, eine für jede Komponente der Felder
r
∂ 2ξ 1 ∂ 2ξ
∂ 2ξ ∂ 2ξ ∂ 2ξ
∇ 2ξ = 2 + 2 + 2 = ε 0µ 0 2 ≡ 2 2
∂t
∂z
∂y
∂x
v ∂t
wobei ξ(x,y,z,t)=Ex, Ey, Ez, Bx, By, und Bz.
Physik
570
Elektromagnetische Wellen
1
= c 2 !!!
ε 0µ 0
Die Ausbreitungsgeschwindigkeit der Wellen, die einer solchen Wellengleichung folgen (Siehe Kap. 5.2.2), ist gleich
v2 =
Wir haben bewiesen, dass sich die elektromagnetischen Wellen mit
einer Geschwindigkeit gleich der Lichtgeschwindigkeit ausbreiten.
r
r
E =cB
für elektromagnetische Wellen
oder
Die Beziehung zwischen den Beträgen der Felder ist die folgende:
r
r
r
v
1
B = 2 E = E
c
c
12.3 Ebene Wellen
Wir haben bisher angenommen, dass der Strom durch den Draht während eines kurzen Zeitintervalls fliesst.
Wir nehmen nun an, dass der Strompuls periodisch ist, und dass er
seine Richtung zwischen den Perioden ändert.
Siehe Abb. 7.
Die resultierende Reihe von elektromagnetischen Pulsen, die
erzeugt werden, wenn der Strom fliesst, entspricht einer elektromagnetischen Welle, die sich radial mit der Lichtgeschwindigkeit ausbreitet.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Ebene Wellen
c
E
nach
unten
nach
i
oben
i0
–i 0
B
t
c
E
Figur 7. Der resultierende elektromagnetische Puls, der durch einen “nach
oben und nach unten” oszillierenden Strom erzeugt wird.
571
Weit entfernt vom Draht kann die Krümmung der radialen Wellenfront nicht mehr beobachtet werden.
Die elektromagnetische Welle erscheint als eine ebene Welle.
Siehe Abb. 8.
Physik
572
Elektromagnetische Wellen
B
Vertikaler Draht
Ebene Welle
Figur 8. Ebene elektromagnetische Wellen. Weit entfernt von der Quelle
erscheinen die gekrümmten Wellen als eben.
c
Elektrisches
Feld
c
In der ebenen elektromagnetischen Welle bewegen sich die elektrischen Felder zueinander parallel. Sie sind senkrecht zu den magnetischen Feldern.
B
Magnetisches
Feld
Die Ausbreitung von ebenen elektromagnetischen Wellen.
Siehe Abb. 9.
E
Figur 9.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Ebene Wellen
Die elektrischen und magnetischen Felder bilden eine Ebene, die
immer senkrecht zur Ausbreitungsrichtung der Welle ist.
12.3.1 Harmonische ebene Wellen
Die ebenen Wellen breiten sich in einer Richtung aus, die immer
senkrecht zu den elektrischen und magnetischen Feldern ist.
Die Ausbreitungsrichtung kann mit Hilfe des Wellenvektors k ausgedrückt werden:
(
)
r
k ≡ kx , ky , kz = Wellenvektor
Die Felder einer harmonischen, ebenen, elektromagnetischen
Welle werden dann geschrieben als (Siehe Kap. 5.4)
r r
r
r r
E ( r , t) = E 0 sin( k ⋅ r − ωt)
r
r r
r r
B( r , t) = B0 sin( k ⋅ r − ωt)
wobei E0 und B0 die Amplitudenvektoren sind. Sie besitzen einen
Betrag und eine Richtung, die der Polarisation der Welle entspricht.
573
Eine Beziehung zwischen k und ω haben wir in Kap. 5.4 hergeleitet:
r
ω
oder
c= r
ω= kc
k
Aus den Maxwellschen Gleichungen
r r
r r
∇ ⋅ E = 0 und ∇ ⋅ B = 0
Physik
574
)
Elektromagnetische Wellen
folgt
(
(
)
(
)
r r ∂E
r
r r
∂E y ∂E z
+
∇⋅ E = x +
wobei E = E 0 x , E 0 y , E 0 z sin( k ⋅ r − ωt)
∂x
∂y
∂z
r r
= E 0 x kx + E 0 y ky + E 0 z kz cos( k ⋅ r − ωt)
r r
r r
= k ⋅ E 0 cos( k ⋅ r − ωt) = 0
und
r r r r
r r
∇ ⋅ B = k ⋅ B0 cos( k ⋅ r − ωt) = 0
Wie schon erwähnt, müssen die Felder senkrecht zur Ausbreitungsrichtung sein:
r r
r r
r r
r r
k ⋅ E 0 = k ⋅ B0 = 0 ⇒ k ⊥E 0 und k ⊥B0
Und aus der Maxwellschen Gleichung
r
r r
B
∂
∇× E = −
∂t
folgt
(
)
)
(
)
r
r
r
r
r r
r
r
r
B
∂
∇ × E 0 sin( k ⋅ r − ωt) = k × E 0 cos( k ⋅ r − ωt) = −
∂t
und deshalb
(
r
r r
r
r
1
1 r r
B = k × E 0 sin( k ⋅ r − ωt) =
k×E
ω
ω
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das elektromagnetische Spektrum
Das magnetische Feld ist gleich dem Vektorprodukt des Wellenvektors und des elektrischen Feldes. Er ist deshalb, wie erwartet, senkrecht zum elektrischen Feld und zur Ausbreitungsrichtung.
B=
1
E
kE =
c
ω
Der Betrag dieses Vektors ist gleich
wie erwartet.
Ebene, harmonische, elektromagnetische Welle.
c
Eine solche ebene, harmonische, elektromagnetische Welle wird in
Abb. 10 dargestellt.
c
Figur 10.
575
Eine solche Welle kann z.B. beobachtet werden, wenn ein sinusförmiger Strom durch einen langen geraden Draht fliesst, und wir weit
entfernt vom Draht die erzeugte Welle beobachten.
12.4 Das elektromagnetische Spektrum
Radiowellen,
Mikrowellen,
Elektromagnetische Wellen treten auf in Form von
1.
2.
Physik
576
Infrarotstrahlung,
sichtbares Licht,
Ultraviolettstrahlung,
Röntgenstrahlung,
und Gammastrahlung.
Elektromagnetische Wellen
3.
4.
5.
6.
7.
c = λν
Diese verschiedenen Arten elektromagnetischer Strahlung unterscheiden sich nur durch ihre Frequenz ν (und ihre Wellenlänge λ):
In Abb. 11 ist das elektromagnetische Spektrum gezeigt.
Die Frequenzen zwischen ungefähr 4 und 8x1014 Hz entsprechen
dem sichtbaren Spektrum. Diese elektromagnetischen Wellen werden
als sichtbares Licht bezeichnet. Die Farben hängen von der Frequenz
ab. Für einen Durchschnittsmenschen entsprechen sie den Bereichen,
die in Tab. 1 angegeben sind.
Gelb
Grün
Blau
Violett
Farbe
5,97-6,22x10–7
5,77-5,97x10–7
4,92-5,77x10–7
4,55-4,92x10–7
3,99-4,55x10–7
Wellenlänge (m)
4,82-3,84x1014
5,03-4,82x1014
5,20-5,03x1014
6,10-5,20x1014
6,59-6,10x1014
7,69-6,59x1014
Frequenz (Hertz)
und Wellenlängen des sichtbaren Lichts.
Orange
6,22-7,80x10–7
TABLE 1. Frequenzen
Rot
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das elektromagnetische Spektrum.
Die Polarisation
Figur 11.
12.5 Die Polarisation
577
Wir definieren die Polarisation der Welle als die Richtung des elektrischen Feldes.
Physik
578
Elektromagnetische Wellen
Siehe Abb. 12.
Elektrisches
E
Feld
B
Magnetisches
Feld
E
Elektrisches
Feld
c
c
a) Vertikal polarisierte elektromagnetische Welle
Magnetisches
B
Feld
Die horizontale und vertikale Polarisation der Welle.
c
c
b) Horizontal polarisierte elektromagnetische Welle
Figur 12.
Weil das elektrische Feld in der Ebene senkrecht zur Ausbreitungsrichtung liegen muss, gibt es nur zwei unabhängige Komponenten des
elektrischen Feldes einer elektromagnetischen Welle.
Siehe Abb. 13.
Die Zerlegung des elektrischen Feldes in diese zwei Richtungen
ergibt zwei Komponenten des Feldes, die als Ex und Ey bezeichnet
werden können.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Polarisation
E
E
b) Horizontale Polarisation
Definition der Polarisation.
a) Vertikale Polarisation
Figur 13.
Ey
c) Kombination
E
Ex
Der Polarisator: es gibt bestimmte Platten aus einem polarisierenden Material, die nur die Wellen hindurchlassen, die parallel zu einer
bestimmten Transmissionsrichtung sind. Die Wellen, die senkrecht
zu dieser Richtung polarisiert sind, werden von der Platte absorbiert.
Experiment: Polaroidfolie mit sichtbarem Licht
Wir benutzen zwei Polarisationsfolien hintereinander. Die erste Folie
wirkt als Polarisator und die zweite als Analysator.
Wenn die beiden Transmissionsrichtungen senkrecht zueinander sind,
gelangt keine Welle durch die Anordnung.
579
Wenn der Winkel zwischen den Transmissionsrichtungen gleich θ ist,
ist die Intensität der durchgelassenen Welle (Gesetz von Malus2)
I = I 0 cos2 θ
wobei I0 die Intensität der ursprünglichen Welle ist.
Experiment: Gitter mit 3cm elektromagnetischen Wellen.
2. E.L. Malus (1775-1812).
Physik
580
Elektromagnetische Wellen
12.6 Energie und Impuls der
elektromagnetischen Wellen
von der Sonne zur Erde, oder
von einem Feuer auf unsere Hand, wenn die Hand sich in der Nähe
des Feuers befindet.
Es ist uns vertraut, dass durch elektromagnetische Wellen Energie
transportiert wird, z.B.
1.
2.
J
W
=
=
s.m 2 m 2
Die Energiestromdichte (oder Leistungsdichte) der Wellen wird
definiert als die transportierte Energie pro Zeiteinheit und Flächeneinheit.
Einheit:
[ Energie]
[Zeit][Fläche]
wobei W=J/s das Watt ist.
12.6.1 Der Poynting-Vektor
r 1 r r
S≡
E×B
µ0
Die Energiestromdichte wird durch den Poynting3-Vektor S
beschrieben:
3. J.H. Poynting (1852-1914).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Energie und Impuls der elektromagnetischen Wellen
Er zeigt in die Richtung, in der die Energie transportiert wird. Er zeigt
z.B. im Fall der ebenen harmonischen Wellen in die Richtung des
Wellenvektors k.
2
=
J m
= [ Energiedichte][Geschwindigkeit]
m3 s
Die Einheit ist gleich Watt/m2 und kann als das Produkt der Energiedichte und der Geschwindigkeit der Welle ausgedrückt werden
r
[S ] = s.mJ
Beispiel: ebene harmonische Welle
r r
1
1
EB =
E B sin 2 ( k ⋅ r − ωt)
µ0
µ0 0 0
Der Betrag des momentanen Poynting-Vektors ist gleich
S=
Oft ist man am mittleren Betrag des Vektors über mehrere Periodendauern interessiert.
Die Intensität der Welle wird definiert als der mittlere Wert des
Betrags des Poynting-Vektors
r
1
I≡ S =
EB
für harmonische Wellen
2µ 0 0 0
wobei wir den Mittelwert der Sinus-Funktion im Quadrat durch 1/2
ersetzt haben.
581
Beispiel: ein Beobachter befindet sich in einer Entfernung r von einer
Punktquelle der Energie pro Zeiteinheit (die Strahlungsleistung)
P0. Die Quelle ist isotrop, d.h. sie sendet Wellen gleichmässig in alle
Richtungen aus.
Physik
582
Elektromagnetische Wellen
Energie durch eine Kugel mit Radius r:
S ( 4πr 2 ) wobei S = Mittelwert auf der Oberfläche der Kugel
0
1 P0µ 0c
2π
r
und
B0 = 8 × 10 −7 T
B0 = E 0 / c
1
1
P = S ( 4πr 2 ) =
E B ( 4πr 2 ) =
E 2 ( 4πr 2 )
2µ 0c 0
2µ 0 0 0
Weil diese Leistung genau so gross wie die Leistung P0 sein muss,
gilt
Es folgt,
E0 =
und
Für P0=1000 W und r=1 m, finden wir
E 0 ≈ 240 V / m
Ein solches elektrisches Feld findet man oft im Labor. B0 ist sehr
klein.
12.6.2 Elektromagnetischer Druck
Weniger bekannt ist die Tatsache, dass elektromagnetische Wellen
auch Impuls transportieren.
D.h., elektromagnetische Wellen können auf einen Körper oder eine
Fläche Druck ausüben: der Strahlungsdruck.
Dieser Effekt wurde von Maxwell theoretisch vorausgesagt. Er
betrachtete die Kraft, die die elektromagnetischen Felder der Welle
auf ein geladenes Teilchen ausüben. Er konnte beweisen, dass die
resultierende Kraft wie ein Druck wirkt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Energie und Impuls der elektromagnetischen Wellen
Nichols und Hull (Dartmouth) und Lebedev (Russland) haben in den
Jahren 1901-1903 den Effekt erfolgreich experimentell nachgewiesen.
Wir betrachten eine elektromagnetische Welle, die auf eine Fläche
fällt und vollständig absorbiert wird. Wir nehmen an, dass die absorbierte Energie (während einem Zeitintervall) gleich E ist.
E
c
(Totalabsorption)
Nach Maxwell ist der auf die Fläche übertragene Impuls gleich:
pem − Druck =
[ Energie] = J = Nm = (kg
[Geschwindigkeit] m / s m / s
m / s2 ) s = kg.
m
s
wobei c die Lichtgeschwindigkeit ist. Die Richtung des übertragenen
Impulses ist durch die Ausbreitungsrichtung der Welle bestimmt.
Einheit:
[ p] =
= [Impuls]
2E
c
(Totalreflexion)
Wird die Welle vollständig von der Fläche reflektiert, so ist der übertragene Impuls doppelt so gross
pem − Druck =
In Analogie ist der übertragene Impuls eines elastich reflektierten
Balls auf eine Wand doppelt so gross, wie der eines inelastisch absorbierten Balls.
583
Wir bemerken, dass der Impuls einer elektromagnetischen Welle im
Vergleich zu den im Alltag beobachteten Impulsen sehr klein ist.
Physik
584
Elektromagnetische Wellen
Beispiel: Licht mit der Energiestromdichte S = 10 W/cm2 fällt eine
Stunde lang auf einen vollständig reflektierenden Spiegel mit der Fläche 1 cm2.
Reflektierte Energie E:
E = (10 W / cm 2 )(1 cm 2 )( 3600 s) = 36000 J
m
2U 2( 36000 J )
=
= 2, 4 × 10 −4 kg.
s
c
3 × 10 8 m / s
Übertragener Impuls p
p=
Die mittlere Kraft, die auf den Spiegel wirkt
m
−4
dp 2, 4 × 10 kg. s
=
= 6, 7 × 10 −8 N
F=
dt
3600 s
(Der Spiegel wird wegen dieses Impulses nicht zerbrechen!).
12.7 Wellentheorie der
elektromagnetischen Wellen
Grundsätzlich kann die “Theorie der elektromagnetischen Wellen”
aus den Maxwellschen Gleichungen hergeleitet werden. Wir haben
z.B. mit diesen Gleichungen die Ausbreitungsgeschwindigkeit der
elektromagnetischen Wellen bestimmt.
Huygens4 hat im Jahre 1678 einen einfachen Mechanismus entwickelt, um die Ausbreitung des Lichts zu verfolgen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellentheorie der elektromagnetischen Wellen
Er kannte die Natur des Lichts nicht: insbesondere wusste er nicht,
dass das Licht eine elektromagnetische Welle ist. Er wusste nur
wenig über die Frequenzen oder die Ausbreitungsgeschwindigkeit
des Lichts.
Dennoch war seine Theorie eine wertvolle Theorie für das Verständnis optischer Phänomene, wie z.B. die Beugung.
12.7.1 Das Prinzip von Huygens
Die Theorie basiert auf einer geometrischen Konstruktion (das Huygenssche Prinzip):
Jeder Punkt einer Wellenfront kann als Ausgangspunkt für
eine kugelförmige Elementarwelle betrachtet werden.
585
Mit dem Prinzip können wir die Wellenfront zu einer späteren Zeit
voraussagen. Nach einer Zeit t wird die neue Position der Wellenfront
durch die Summe der einzelnen Elementarwellen gegeben.
Siehe Abb. 14.
4. C. Huygens (1629-1695).
Physik
586
Elektromagnetische Wellen
Wellenfront zur späteren
Zeit
Wellenfront
Die Huygenssche geometrische Konstruktion.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Abb. 15 zeigt z.B. Wasserwellen in einer flachen Wellenwanne, die
dadurch erzeugt werden, dass man einen Stab periodisch in die Wasseroberfläche eintauscht.
a≈λ
Wir betrachen z.B. eine ebene Welle der Wellenlänge λ, die auf einen
Spalt mit einer Breite a fällt. Der Spalt ist etwa so gross wie die Wellenlänge:
Figur 14.
Ausbreitungsgeschdinwigkeit v
undurchsichtiger Schirm
Wellentheorie der elektromagnetischen Wellen
λ
Spalt der Breite a
Wasserwellen in einer Wellenwanne fallen auf einen Spalt. Es gilt
a
Figur 15.
a ≈ λ.
Nach dem Prinzip von Huygens wirkt jeder Punkt des Spalts als eine
Quelle einer sich ausbreitenden Elementarwelle.
Weil die Breite des Spaltes ungefähr so gross wie die Wellenlänge ist,
entspricht der Spalt einer einzelnen Quelle.
587
Es folgt daraus, dass die ebene Welle, die auf den Spalt fällt, sich
nachher als konzentrische Kreise ausbreiten wird.
Physik
588
Elektromagnetische Wellen
Dieses Phänomen wird als Beugung der Welle bezeichnet. Sie wurde
von F. Grimaldi5 entdeckt.
Im Allgemeinen versteht man unter der Beugung die Ablenkung der
Wellen an einem Hindernis, wie z.B. an der Kante eines Spalts.
12.7.2 Interferenz der elektromagnetischen Wellen
In Kap. 5.5 haben wir gesehen, dass Interferenzeffekte in mechanischen Wellen aus dem Prinzip der Superposition (Siehe Kap. 5.3)
folgen.
Wir haben dort die Überlagerung zweier mechanischer Wellen derselben Frequenz und mit einer zeitlich konstanten Phasendifferenz
betrachtet.
Wir hatten festgestellt, dass als Folge der Interferenz die resultierende
Welle nicht gleichförmig im Raum verteilt ist, sondern an bestimmten
Bereichen des Raumes Maxima und Minima auftreten (Konstruktive
und destruktive Interferenz).
Der experimentelle Nachweis von Interferenzeffekten für Licht
gelang T. Young6 im Jahre 1801.
Damit konnte die Wellentheorie des Lichts auf eine feste experimentelle Basis gestellt werden.
Bei seinen Versuchen konnte Young auch als Erster die Wellenlänge
des Lichts messen.
5. F. Grimaldi (1618-1663).
6. T. Young (1773-1829).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellentheorie der elektromagnetischen Wellen
Young liess durch zwei kleine Löcher in einem Schirm Sonnenlicht
fallen (Youngsches Experiment). Dadurch entstanden auf der anderen Seite des Schirms zwei sich überlagernde Kugelwellen.
Die Löcher beim Youngschen Experiment sollten sehr klein sein,
etwas so gross wie die Lichtwellenlänge, so dass die Löcher als einzelne Quellen für Huygenssche Elementarwellen wirken:
a ≈ λ ≈ 0.5 µm = 5 × 10 −7 m
Wenn diese Bedingung erfüllt ist, können wir beide Löcher als Quellen einzelner Elementarwellen, die sich ausbreiten, betrachten. Die
resultierende Welle ist in jedem Punkt gleich der Summe der einzelnen Wellen.
Experiment: Interferenz von Wasserwellen in einer Wasserwanne.
Das resultierende Muster können wir mit Hilfe der Interferenz von
Wasserwellen in einer Wasserwanne herleiten.
589
Hier werden kreisförmige Wasserwellen durch die periodische Bewegung zweier synchroner Stäbe erzeugt, die ins Wasser eingetauscht
werden.
Siehe Abb. 16.
Physik
590
Elektromagnetische Wellen
Knotenlinie
Linie von Bäuchen
Wellentheorie der elektromagnetischen Wellen
Wenn diese Bedingung erfüllt ist, können wir beide Löcher als Quellen einzelner Elementarwellen, die sich als Kugelwellen ausbreiten,
betrachten.
Die resultierende Welle ist in jedem Punkt gleich der Summe der einzelnen Wellen (Interferenz des Lichts).
Wenn wir in den Bereich, wo die Wellen interferieren, einen Schirm
bringen, so erwarten wir, dass auf ihm dunkle (Minima der Intensität) und helle (Maxima der Intensität) Stellen entstehen.
Knotenlinie
Linie von Bäuchen
erstes Nebenmaximum
zentrales Maximum
591
erstes Nebenmaximum
Die Intensitätsverteilung auf einem Schirm.
Schirm
Intensität
Siehe Abb. 17.
Physik
Figur 17.
a << λ
Knotenlinie
Linie von Bäuchen
Knotenlinie
Figur 16. Interferenz von Wasserwellen in einer Wasserwanne. Entlang der
Knotenlinien findet Auslöschung statt, und dazwischen liegen die Bäuche,
in denen sich die zwei Wellen verstärken.
12.7.3 Beugung am Doppelspalt
Wir studieren die Beugung des Lichts beim Youngschen Experiment.
Wir nehmen an, dass die Breite der Löcher viel kleiner als die Wellenlänge sind:
a << λ
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
592
Elektromagnetische Wellen
θ
P
Wir nehmen an, dass der Abstand D zwischen den Schirmen viel
grösser als der Abstand d zwischen den Löchern ist.
d
∆x
D
Bestimmung des Winkels des ersten Maximums.
θ
Siehe Abb. 18.
Figur 18.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellentheorie der elektromagnetischen Wellen
n = 0,1, 2,...
Wir betrachten einen Punkt P auf dem Schirm. Um eine konstruktive
Interferenz in diesem Punkt zu beobachten, muss der Gangunterschied ∆x so sein, dass gilt (Siehe Kap. 5.5):
1
k∆x = nπ
2
2πn
= nλ
k
n = 0,1, 2,...
In diesem Fall ist der Gangunterschied so, dass die beiden Wellen in
Phase sind, weil der Gangunterscheid gleich einer ganzen Anzahl von
Wellenlängen ist:
∆x =
∆x = d sin θ = nλ
n = 0,1, 2,...
( Maxima)
Damit im Punkt P ein Maximum der Intensität entsteht, muss gelten
wobei θ der Winkel zwischen dem Lichtstrahl und der Normalen auf
den Schirm ist.
n = 0,1, 2,...
( Minima)
Für ein Minimum in P muss der Gangunterschied ein halbzahliges
Vielfaches von Wellenlängen enthalten
1
∆x = d sin θ = n + λ
2
12.7.4 Beugung am Einzelspalt
Wir studieren die Beugung an einem Einzelspalt als Funktion der
Breite des Spalts.
593
Wir nehmen an, dass eine ebene Welle auf einen langen und engen
Spalt mit der Breite a fällt.
Physik
594
Beugung an einem Einzelspalt.
Elektromagnetische Wellen
Figur 19.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
a << λ
a ≈ 2λ
a ≈ 6λ
Wellentheorie der elektromagnetischen Wellen
a << λ
Wenn die Breite a viel kleiner ist als die Wellenlänge λ, können wir
den Spalt als einzelne Quelle von Elementarwellen betrachten.
Einzelspalt mit
a≈λ
oder
a>λ
Wenn die Breite a nicht mehr viel kleiner als die Wellenlänge λ ist,
können wir jeden Punkt des Spalts als Quelle von Elementarwellen
betrachten:
Siehe Abb. 19.
Diese Elementarwellen, die einen Punkt P erreichen, unterscheiden
sich in der Phase voneinander.
Experiment: Ausbreitung des Lichts durch einen Einzelspalt.
Licht von einem Laser wird durch einen Spalt der Breite
≈10µm durchgelassen.
Die Intensitätverteilung des Lichts wird mit Hilfe eines
Empfängers gemessen und projiziert.
Wir beobachten Interferenzstreifen.
Die beobachtete Intensitätsverteilung wird in Abb. 20 gezeigt.
Wir bemerken, dass der Hauptteil der Intensität sich beim Winkel θ=0
befindet (das zentrale Beugungsmaximum).
595
Auf beiden Seiten des zentralen Maximums finden wir andere, sehr
viel schwächere, Nebenmaxima. Die Intensität der Nebenmaxima
nimmt mit der Ablenkung ab.
Zwischen den Maxima gibt es Minima.
Physik
596
Gemessene Intensitätsverteilung bei der Einzelspaltbeugung.
Elektromagnetische Wellen
Figur 20.
Wir bestimmen die Position des ersten Minimums.
Wir können den Spalt in kleine Teile unterteilen, die als Quelle für
eine Elementarwelle wirken. Wir können z.B. 1000 Teile betrachten.
Siehe Abb. 21.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellentheorie der elektromagnetischen Wellen
Wir betrachten die Quelle #1, die sich oben am Spalt befindet und die
Quelle #501, die sich in der Mitte des Spalts befindet.
499
500
501
502
503
1
2
3
4
5
6
λ/2
λ
icht
in R
ung
des
Min
ms
imu
Wenn der Gangunterschied zwischen diesen Quellen gleich einer halben Wellenlänge ist, werden die Wellen sich auslöschen.
a
998
999
1000
Figur 21. Bestimmung des Winkels eines Minimums in der Beugung durch
einen Einzelspalt der Breite a.
597
Entsprechend gilt dies auch für die Quelle #2 und die Quelle #502.
Sie werden sich auslöschen. Und so weiter mit den Quellen #3, #4, ..
bis #499.
Physik
598
Elektromagnetische Wellen
⇒
sin θ =
λ
→∞
a
a sin θ = λ
Kein Minimum
( Erstes Minimum)
Aus der Abb. 21 erhalten wir die gesamte Bedingung für das erste
Minimum
λ
a
sin θ =
2
2
⇒
Wir bemerken, dass wenn
a << λ
Siehe Abb. 19.
⇒
sin θ =
λ
→0
a
⇒
Beugung verschwindet
Wenn die Breite viel grösser als die Wellenlänge ist, verschwindet der
Beugungseffekt und ist nur an den Rändern des Spalts sichtbar:
a >> λ
Siehe Abb. 22.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellentheorie der elektromagnetischen Wellen
a >> λ
599
Figur 22. Beugungmuster wenn die Breite viel grösser als die Wellenlänge
ist. Der Beugungseffekt verschwindet und ist nur an den Rändern des
Spalts sichtbar.
Physik
600
Elektromagnetische Wellen
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Kapitel 13
Quantenmechanik
13.1 Einleitung
Die Quantenmechanik basiert im Wesentlichen auf folgender experimentellen Beobachtung:
Alle Elementarteilchen (z.B. Elektronen oder Protonen) sind
gleichzeitig ein Teilchen und eine Welle.
Alle Systeme, die aus Elementarteilchen aufgebaut sind, d.h.
Atome, Moleküle, usw., d.h, alles, was wir in der Natur kennen, zeigt einen Teilchen-Wellen-Dualismus.
Elektromagnetische Wellen können sich auch wie ein Teilchen
oder eine Welle verhalten.
601
Teilchen. Wenn wir von einem Teilchen sprechen, meinen wir etwas,
das eine bestimmte räumliche Ausdehnung besitzt. Die Elementarteilchen werden z.B. oft als sehr kleine Kugel dargestellt.
Physik
602
Quantenmechanik
Teilchen befinden sich an einem bestimmten Punkt des Weltraumes
(sie sind an einem Ort lokalisiert). Wir definieren diese Punkte mit
Hilfe ihrer Ortsvektoren
r
r ≡ ( x, y, z )
Teilchen können beschleunigt werden und bewegen sich auf
bestimmten Bahnen durch den Raum, die als Funktionen der Zeit dargestellt werden können:
r
r
r
a ( t) ⇒ v ( t) ⇒ r ( t)
Teilchen besitzen eine bestimmte Energie und einen bestimmten
Impuls. Wir erinnern uns an den relativistischen Energie-Impuls 4Vektor (Siehe Kap. 6.9)
r
p µ ≡ ( E , pc )
Wenn zwei Teilchen in “Berührung” miteinander kommen, werden
sie streuen. Sie wechselwirken miteinander und können Energie und
Impuls austauschen. Während diesen Vorgängen müssen die gesamte
Energie und der gesamte Impuls erhalten werden.
Welle. Wenn wir von einer Wellen sprechen, meinen wir etwas, das
eine ausgedehnte räumliche Verteilung besitzt.
Man kann nicht von einem einzigen Ortsvektor einer Wellen sprechen. Die Energie und der Impuls, die sie übertragen, sind kontinuierlich im Raum verteilt. Die Felder einer harmonischen, ebenen,
elektromagnetischen Welle sind z.B.
r r
r
r r
E ( r , t) = E 0 sin( k ⋅ r − ωt)
r
r r
r r
B( r , t) = B0 sin( k ⋅ r − ωt)
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Quantisierung des Lichts
Die Wellennatur kann sich in bestimmten Fällen zeigen, wie z.B. bei
der Beugung einer Welle. D.h., eine Welle besitzt Interferenzfähigkeit.
Wenn zwei Wellen in “Berührung” miteinander kommen, werden sie
interferieren. Nachher trennen sich die Wellen wieder und laufen
weiter, ohne dass sich ihre Form geändert hat.
13.2 Die Quantisierung des Lichts
Einstein1 hat im Jahre 1905 eine wichtige Annahme über die Natur
des Lichts gemacht (die Photonentheorie des Lichts). Seine Vorstellung war in scharfem Kontrast zur Wellentheorie des Lichts.
Er schlug vor, dass
elektromagnetische Welle nicht kontinuierlich im Raum verteilt sind, sondern in kleinen Paketen quantisiert sind.
Elektromagnetische Wellen entstehen aus der Bewegung einer
endlichen Zahl von im Raum lokalisierten Quanten, die nur
als Ganzes absorbiert oder emittiert werden können.
Diese Quanten werden als Photonen (γ) bezeichnet.
603
Elektromagnetische Wellen sind deshalb als Strahlung von
Elementarteilchen (die Photonen) zu betrachten.
1. A. Einstein (1789-1956).
Physik
604
Quantenmechanik
hc
λ
Die Energie eines einzelnen Photons ist durch die Beziehung
gegeben:
E = hν =
= J .s
wobei ν die Frequenz der elektromagnetischen Welle, λ die
Wellenlänge, c die Lichtgeschwindigkeit bedeuten, und h ist
eine Konstante, die als Plancksche Konstante bezeichnet
wird.
Einheit:
[Frequenz]
Energie]
[h] = [
Der Wert der Planckschen Konstante h ist
h = 6, 63 × 10 −34 J .s = 4,14 × 10 −15 eV .s
Das Produkt hc ist gleich (1eV=1,602x10–19 J)
hc ≈ 2 × 10 −25 J .m = 1, 2 eV .µm
Beispiel: sichtbares Sonnenlicht
E Rot ≈
1, 2 eV .µm
= 1, 7 eV
0, 7µm
Sichtbares Spektrum λ ≈ 0,4(Violett)-0,7(Rot) µm
hc 1, 2 eV .µm
≈
= 3 eV
0, 4 µm
λ
Die Quantisierung des Lichts
(2eV )(1, 602 × 10 −19 J )
150 W / m 2
= 4, 7 × 1016 γ / s / cm 2 !!
Annahme: PSonne≈150 W/m2 auf der Erdoberfläche, Eγ≈2 eV
Nγ ≈
Eine sehr grosse Anzahl von Photonen! Wir beginnen zu merken,
dass die Plancksche Konstante sehr klein ist relativ zur Grösse der
Energien und Zeiten, die uns aus dem Alltag vertraut sind.
Experiment: Photonenzähler
Ruhemasse des Photons: Jedes Photon verhält sich wie ein Teilchen
und besitzt deshalb eine Energie E und einen Impuls p.
E
c
(Totalabsorption)
Wir haben in Kap. 12.6 schon erwähnt, dass auch in der klassischen
Theorie elektromagnetische Wellen Energie und Impuls tragen. Wir
haben in Kap. 12.6.2 gesehen, dass im Fall der Totalabsorption der
Welle die Beziehung zwischen der Energie der Wellen und dem übertragenen Impuls die folgende ist
pem − Druck =
⇒
β=
pc
=1
E
⇒ E = pc ( Photonen )
Die Photonen müssen sich mit Lichtgeschwindigkeit bewegen. Die
Beziehung zwischen Energie und Impuls der Photonen folgt deshalb
aus der Relativitätstheorie
β = v /c =1
Wenn die Photonen von einer Fläche absorbiert werden, ist natürlich
die gesamte Energie und der gesamte Impuls erhalten. Die Welle
scheint deshalb Energie und Impuls zu tragen.
EViolett =
Anzahl der Photonen auf der Oberfläche der Erde:
Physik
605
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
606
Quantenmechanik
Weil (Siehe Kap. 6.9)
r
( E ) 2 − ( pc ) 2 = ( m0c 2 )
2
folgt, dass die Ruhemasse des Photons gleich null ist:
r
E = pc ⇒ m0c 2 ≡ 0
( Photonen )
Wir sprechen von masselosen Elementarteilchen.
Es folgt daraus, dass es kein Bezugssystem gibt, relativ zu welchem
Photonen sich in Ruhe befinden.
Photonen besitzen nur kinetische Energie und bewegen sich relativ zu
allen Beobachtern mit derselben Geschwindigkeit, der Lichtgeschwindigkeit.
γ =∞
Streng genommen ist der Lorentzfaktor von Photonen gleich unendlich:
β =1 ⇔
Das Photon kann nur eine endliche Energie besitzen, wenn es masselos ist:
E = γm0c 2 → (∞)(0)c 2 = endlicher Wert
13.3 Die Wellennatur der Teilchen
13.3.1 Die Hypothese von de Broglie
Louis de Broglie2 schlug im Jahr 1924 vor, dass
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
auch Elektronen, wie Photonen, Wellen- und Teilcheneigenschaften besitzen.
und
E = pc ⇒
hω
≡ hω
2π
und
p=
pc =
p=
h
λ
hc
⇒
λ
h hk
=
≡ hk
λ 2π
h
≈ 1, 054 × 10 −34 J .s
2π
p=
h
λ
607
Wenn die Photonen sowohl Wellen- als auch Teilcheneigenschaften
besitzen, warum sollte dies nicht auch für Elektronen gelten?
hc
λ
Für das Photon schlug Einstein vor, dass
E = hν =
und
Für ein Elektron müssen dieselben Gleichungen gelten:
E = hν
wobei E die Energie und p der Impuls des Elektrons ist.
E = hν =
Oft werden diese Beziehungen so geschrieben:
wobei
h=
Beispiel: nicht-relativistisches Elektron
2. L. de Broglie (1892-1987).
Physik
608
Quantenmechanik
Sein Impuls ist
E kin =
⇒
h
=
2 me E kin
1
p2
m v2 =
2 e
2 me
und seine Wellenlänge ist
h
λ= =
p
p = 2 me E kin
hc
2 me c 2 E kin
2 me c 2eU
hc
≈
1, 23 × 10 −9 m
U (Volt)
Wenn ein ruhendes Elektron durch einen Potentialunterschied U
beschleunigt wird, ist seine kinetische Energie gleich
E kin = eU ⇒ λ =
Für U=10’000 Volt finden wir λ ≈ 1,23x10–11 m.
Wir bemerken noch einmal, dass die Plancksche Konstante klein ist.
Sie führt zu Wellenlängen, die sehr klein sind, relativ zur Grösse der
Längen, die uns aus unserem Alltag vertraut sind.
13.3.2 Ein Elektron in einem Kasten
Wir betrachten ein endliches Volumen V, das die Form eines Kastens
besitzt. Wir nehmen an, dass ein Elektron sich im Volumen V befindet.
Um das Problem zu vereinfachen, werden wir die eindimensionale
Lösung suchen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
0 wenn 0 < x < d
E pot ( x ) =
∞ andernfalls
Der eindimensionale Kasten der Breite d wird durch einen Potentialtopf mit unendlich hohen Wänden beschrieben, wobei gilt
Siehe Abb. 1.
d
Die Definition des eindimensionalen Kastenpotentials Epot(x).
Epot(x)
Figur 1.
609
In der klassischen Mechanik würde man die Position des Elektrons
mit Hilfe seines Ortsvektors beschreiben. Wir sagen, dass zur Zeit t
das Elektron sich bei der Position r befindet, wobei r der Ortsvektor
des Elektrons ist.
Physik
610
Quantenmechanik
E=
e
p2
+ E pot
2m
Die klassische, nicht-relativistische, gesamte Energie des Elektrons
ist
Weil
E pot ( x ) = ∞ wenn x < 0 oder x > d
kann das Elektron sich nie in diesen Bereichen befinden. Das Elektron muss deshalb im Kasten bleiben.
In der Quantenmechanik kann das Elektron nicht mehr mit Hilfe seines Ortsvektors lokalisiert werden. Wir müssen das Elektron als eine
Welle betrachten.
Das Elektron wird mit Hilfe seiner Wellenfunktion ψ beschrieben:
r
ψ = ψ ( r , t)
ψ = ψ ( x, t)
in 3 Dimensionen:
Wellenfunktion:
in 1 Dimension:
Wir müssen für die Wellenfunktion eine Bedingung finden, die der
Tatsache entspricht, dass das Elektron sich nie ausserhalb des Kastens
befinden wird. Wir nehmen an, dass die Wellenfunktion des Elektrons
ausserhalb des Kastens verschwindet (diese Annahme gilt nur, wenn
das Kastenpotential unendlich hoch ist) !
ψ ( x, t) ≡ 0 wenn x ≤ 0 oder x ≥ d
Randbedingung für Kastenpotential
Wir werden deshalb der Wellenfunktion sogenannte Randbedingungen auferlegen
ψ (0, t) = ψ ( d, t) ≡ 0
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
Zeitabhängigkeit
f ( t)
{
Wir suchen eine harmonische stationäre Lösung für das Elektron,
die die Randbedingungen erfüllt. In Analogie zu stehenden Wellen
(Siehe Kap. 5.6) faktorisieren wir die räumliche und die zeitliche
Abhängigkeit der Wellenfunktion:
Räumliche Abhängigkeit
Ansatz: ψ ( x, t) = ( A sin( kx ) + B cos( kx )) ×
1444
424444
3
wobei A und B Konstanten sind, die bestimmt werden müssen.
und
kd = nπ
ψ (0, t) = (0 + B) f ( t) = 0
ψ ( d, t) = ( A sin( kd ) + B cos( kd )) f ( t) = 0
Aus den Randbedingungen folgt, dass die Wellenfunktion zu jeder
Zeit in den Punkten x=0 und x=d verschwinden muss:
oder
B=0
π
d
n = 1, 2, 3,...
wobei n als Wellenzahl bezeichnet wird.
Es folgt daraus,
kn = n
611
Wir sehen, dass als Folge der Randbedingung der Wellenvektor des
Elektrons ein ganzzahliges Vielfaches von π/d sein muss.
Physik
612
h2
p2
n
= n2
2 me
8 me d 2
1.
2.
3.
E n = n 2 E1
wobei
h2
E1 =
8 me d 2
annehmen!
Die Energie mit n=1 ist die Grundzustandsenergie, d.h. die niedrigste Energie, die das Elektron im Kasten besitzen kann.
Die Energie und der Impuls des Elektrons im endlichen Kasten
werden nie verschwinden, d.h. n>0 ! Das Elektron kann im Kasten
nie ruhen. Es besitzt immer eine minimale kinetische Energie und
wird sich immer bewegen.
Es gilt
2
h 2 1 (6, 63 × 10 −34 J .s) 1 6 × 10 −38 J 3, 8 × 10 −19 eV
E1 =
≈
≈
=
d2
d2
8 me d 2 8(9,11 × 10 −31 kg) d 2
Wir haben in Kap. 7.2.6 gesehen, dass in Atomen der Abstand der
Elektronen vom Kern ungefähr bei
rElektron ≈ 10 −10 m
−10
m)
2
3, 8 × 10 −19 eV
(10
≈ 40 eV !!
2 E1
≈ 0, 01c
me
613
liegt. Die minimale Energie eines Elektrons, das sich in einem
Kasten des Durchmessers gleich diesem Radius befindet, ist gleich
E1 ≈
p1 = 2 me E1 = me v e ⇒ v e =
Diese Energie entspricht der Geschwindigkeit
Physik
4.
Die Energie ist quantisiert. D.h., das Elektron kann nicht eine
beliebige Energie annehmen. Da die Energie E von der Wellenzahl
n abhängt, kann die Energie des Elektrons nur die Werte
Die Wellennatur der Teilchen
En =
Quantenmechanik
und
Wir bemerken:
hkn hnπ nh
=
=
2π
2πd 2 d
Mit Hilfe der Beziehungen von de Broglie können wir die Energie
und den Impuls des Elektrons im Kasten bestimmen:
pn ≡ hkn =
Die Wellenfunktionen für n=1,2,..,6 und die entsprechenden Energien
sind in Abb. 2 gezeigt.
ψ
Figur 2. Die (räumliche) Abhängigkeit der stationären Wellenfunktionen
und die entsprechenden Energien eines Elektrons in einem Kasten (hh=1
und me=1).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
614
Quantenmechanik
5.
Ein Elektron kann sich nie im Bereich eines Atoms befinden, und
sich langsamer als mit 1% der Lichtgeschwindigkeit bewegen.
Die niedrigste Energie nimmt mit der Grösse des Kastens d im
Quadrat ab. Für makroskopische Längen ist sie naturlich vernachlässigbar, und wir finden das klassische Ergebnis wieder zurück.
Ein Elektron in einem makroskopischen Kasten kann sich in Ruhe
befinden. Dieses Ergebnis ist aber nur eine Näherung.
13.3.3 Die Schrödinger-Gleichung
Im Jahr 1926 formulierte E. Schrödinger3 eine Wellengleichung zur
Beschreibung der Ausbreitung der Wellenfunktion des Teilchens, in
Analogie zur Wellengleichung für klassische mechanische oder elektromagnetische Wellen.
E=
Die gesamte klassische Energie eines nicht-relativistischen Teilchens,
das sich in einem Potential bewegt, ist gleich
r
r
p2
+ E pot ( r , t)
2m
∂
∂t
und
r
∂ ∂ ∂
r
p ≡ −ih∇ = −ih , ,
∂x ∂y ∂z
Schrödinger postulierte, dass man die klassische Energie-ImpulsBeziehung benutzen muss, und die Energie und den Impuls durch
Operatoren, die auf die Wellenfunktion wirken, ersetzen muss:
E ≡ ih
Die Wellennatur der Teilchen
Eψ ≡ ih
∂
ψ
∂t
Der Energie-Operator (wird auch als Hamilton-Operator bezeichnet) wird folgendermassen benutzt
und der Impuls-Operator
r
∂ψ ∂ψ ∂ψ
r
,
,
pψ ≡ −ih∇ψ = −ih
∂x ∂y ∂z
(
)
Die kinetische Energie wird so berechnet
r
2 r
r 2
2
p
h
h 2 ∂ 2ψ ∂ 2ψ ∂ 2ψ
−
−
1
+
+
∇ 2ψ =
−ih∇ ψ =
ψ =
2m
2m
2 m ∂x 2 ∂y 2 ∂z 2
2m
wobei wir den Laplace-Operator (Siehe Kap. 12.2.1) erkennen.
Die Schrödinger-Gleichung wird deshalb so hergeleitet:
r
r
r
r
r
p2
Eψ ( r , t) =
ψ ( r , t) + E pot ( r , t)ψ ( r , t)
2m
oder
r
r
− h2 r 2 r
∂ r
∇ ψ ( r , t) + E pot ( r , t)ψ ( r , t)
ih ψ ( r , t) =
∂t
2m
Schrödinger − Gleichung
Sie beschreibt, wie die klassische Wellengleichung, die zeitliche Entwicklung der Wellenfunktion.
Diese Differentialgleichung setzt die zeitliche und die räumlichen
partiellen Ableitungen der Wellenfunktion miteinander in Beziehung.
3. E. Schrödinger (1887-1961).
Physik
615
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
616
Quantenmechanik
Die Zeitentwicklung der Wellenfunktion wird deshalb durch Integration der Schrödinger-Gleichung gewonnen.
Wir bemerken, dass die Schrödinger-Gleichung explizit die imaginäre Zahl i verwendet. Deshalb erwarten wir, dass die allgemeinen
Lösungen der Schrödinger-Gleichung komplexwertig sind.
ih
− h2 ∂2
∂
ψ ( x, t) =
ψ ( x, t)
∂t
2 m ∂x 2
Beispiel: ein freies Teilchen in 1 Dimension
Ansatz:
ψ ( x, t) = Ae i( kx −ωt ) = A cos( kx − ωt) + Ai sin( kx − ωt)
wobei k der Wellenvektor und ω die Kreisfrequenz ist.
Es folgt,
∂
− h2 ∂2
ih ( Ae i( kx −ωt ) ) =
( Ae i( kx −ωt ) )
∂t
2 m ∂x 2
− h2
(ik ) 2 Ae i( kx −ωt )
2m
ih(−iω ) Ae i( kx −ωt ) =
h2k 2
2m
freies Teilchen
und die Beziehung zwischen dem Wellenvektor und der Kreisfrequenz des freien Teilchen ist
hω =
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
⇒
E=
p2
2m
Diese Gleichung ist das Analogon zu der Beziehung zwischen Energie und Impuls des freien Teilchens. Mit Hilfe der Gleichungen von
de Broglie finden wir, wie erwartet, folgendes:
E = hω und p = hk
13.3.4 Die stationären Zustände
Räumliche Abhängigkeit
Zeitabhängigkeit
Um eine stationäre Lösung der Schrödinger-Gleichung zu finden,
werden wir, in Analogie zu den stehenden Wellen, einen Ansatz
betrachten, in dem die räumliche und die zeitliche Abhängigkeit faktorisiert werden (Siehe Kap. 5.6 und 13.3.2):
r
φ{
(r )
×
χ ( t)
{
Ansatz: ψ ( x, t) =
Im Fall, dass die potentielle Energie Epot unabhängig von der Zeit ist,
wird sich die Schrödinger-Gleichung vereinfachen:
r
r
r
∂
− h2 r 2 r
ih (φ ( r ) χ ( t)) =
∇ (φ ( r ) χ ( t)) + E pot ( r )(φ ( r ) χ ( t))
∂t
2m
r
r ∂
r
r
r
− h2
χ ( t)∇ 2 (φ ( r )) + E pot ( r )(φ ( r ) χ ( t))
⇒ ihφ ( r ) ( χ ( t)) =
∂t
2m
r
1 ∂χ ( t) − h 2 1 r 2 r
=
r ∇ φ ( r ) + E pot ( r )
χ ( t) ∂t
2m φ (r )
⇒ ih
617
Wir bemerken, dass die linke Seite der letzten Gleichung nur von der
Zeit abhängt und die rechte Seite nur vom Ortsvektor. Beide Seiten
sind deshalb voneinander unabhängig und müssen gleich einer Konstanten sein!
Physik
618
Quantenmechanik
Ansatz:
1 ∂χ ( t)
= ihe iωt (−iω )e − iωt = hω = E = Konst. → ok!
χ ( t) ∂t
χ ( t) ≡ e − iωt
⇒ ih
r
r
r
∂
− h 2 r 2 r − iωt
ih (φ ( r )e − iωt ) =
∇ (φ ( r )e ) + E pot ( r )(φ ( r )e − iωt )
∂t
2m
r
r
r
− h 2 r 2 r − iωt
E (φ ( r )e − iωt ) =
∇ (φ ( r )e ) + E pot ( r )(φ ( r )e − iωt )
2m
Die allgemeine Lösung der stationären Zustände ist dann
r
r
ψ ( r , t) = φ ( r )e − iωt
wobei
oder
r − h2 r 2 r
r r
Eφ ( r ) =
∇ φ ( r ) + E pot ( r )φ ( r )
2m
Zeitunabhängige Schrödinger − Gleichung
Diese Gleichung hängt natürlich nur vom Ortsvektor ab. Wenn die
potentielle Energie bekannt ist, kann sie im Prinzip gelöst werden,
um die räumliche Abhängigkeit der Wellenfunktion zu finden.
Die vollständige Lösung ist dann
r
r
ψ ( r , t) = φ ( r )e − iωt
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
wobei wir eine sehr einfache Zeitabhängigkeit erkennen. Die Kreisfrequenz ist gleich
ω = E /h
13.3.5 Die Interpretation der Wellenfunktion
Die Wellenfunktion ψ kann komplexe Werte annehmen. Ihre Interpretation wurde während des ersten Teils des 20. Jahrhunderts viel diskutiert.
M. Born4 hat eine Interpretation der Wellenfunktion gegeben, die
heutzutage als die richtige angenommen wird:
Die Wellenfunktion beschreibt den Zustand des Elektrons. Ein
Elektron wird tatsächlich als ein “Teilchen” nachgewiesen.
Sein Verhalten, d.h. seine Position im Raum, sein Impuls und
seine Energie wird aber durch seine Wellenfunktion beschrieben.
Das Betragsquadrat der Wellenfunktion entspricht der Wahrscheinlichkeit, das Teilchen an einem bestimmten Ort zu finden:
619
Die Wahrscheinlichkeit P, dass das Teilchen sich in einem infinitesimalen Volumen dV an einem Punkt r befindet, ist gleich
r 2
r
r
ψ ( r , t) dV = ψ * ( r , t)ψ ( r , t) dV
wobei ψ* die komplex Konjugierte der Wellenfunktion ist.
4. M. Born (1882-1970).
Physik
620
Quantenmechanik
V
V
Die mittlere Position des Elektrons im Volumen V (oder der sogenannte Erwartungswert des Ortsvektors r) wird deshalb durch die
folgende Beziehung gegeben:
r
r r 2
r r r
r ( t) = ∫∫∫ r ψ ( r , t) dV = ∫∫∫ ψ * ( r , t) r ψ ( r , t) dV
Wir bemerken, dass das Elektron nicht mehr in einem bestimmten
Punkt des Raumes lokalisiert wird. Tatsächlich kann man nicht mehr
sagen, wo das Elektron sich befindet!
Die Schrödinger-Gleichung sagt nicht voraus, wie sich das
Elektron als Funktion der Zeit bewegt. Sie sagt voraus, wie
die Wellenfunktion des Elektrons sich ausbreitet. Die Wellenfunktion sagt nicht voraus, wo das Elektron sich befindet. Sie sagt voraus, was die Wahrscheinlichkeit ist, das
Elektron an einem bestimmten Ort zu finden.
Wir können deshalb nicht mehr die Bahnkurve eines Elektrons definieren.
Beispiel: Elektron im Kastenpotential.
ψ ( x, t) ≡ φ ( x )e − iωt
Wir betrachten die eindimensionalen stationären Wellenfunktionen
des Elektrons im Kasten
Stationärer Zustand ⇒
2
2
2
weil
e iz = 1
Das Betragsquadrat des räumlichen Teils der Wellenfunktionen ist in
Abb. 3 gezeigt:
ψ ( x, t) = φ ( x )e − iωt = φ ( x )
Der zeitabhängige Teil spielt deshalb keine Rolle im Betrag. Wenn
das Elektron sich in einem stationären Zustand befindet, ist die Wahr-
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
scheinlichkeit, es an einem bestimmten Punkt des Raumes zu finden,
unabhängig von der Zeit!
Wir bemerken auch, dass das Elektron im Raum nicht lokalisiert ist.
D.h., es gibt verschiedene unabhängige entfernte Raumgebiete, in
denen die Wahrscheinlichtkeit, das Elektron zu finden, nicht verschwindet.
621
Die Anzahl dieser Raumgebiete hängt von der Energie ab und nimmt
mit ihr zu.
Figur 3. Das Betragsquadrat der Wellenfunktionen, die die stationären
Zustände des Elektrons im Kasten beschreiben.
Physik
622
Quantenmechanik
13.3.6 Überlagerung von Zuständen
Wir haben gesehen, dass ein Elektron im Raum nicht lokalisiert sein
muss.
Wahrscheinlichkeit von 50%
Es kann z.B. sein, dass das Elektron sich in sehr entfernten Raumgebieten mit gleicher Wahrscheinlichket befinden kann!
Siehe Abb. 4.
Vor dem Nachweis:
Wahrscheinlichkeit von 50%
Nach dem Nachweis (Reduktion der Wellenfunktion):
Wahrscheinlichkeit von 100%
Figur 4. Reduktion der Wellenfunktion. Wenn das Elektron nachgewiesen
wird, wird seine Wellenfunktion auf den Punkt, wo es nachgewiesen wird,
reduziert.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Wellennatur der Teilchen
Was geschieht, wenn das Elektron nachgewiesen wird?
Wir haben gesagt, dass das Elektron sich als ein Teilchen verhalten
wird. D.h., ein Elektron wird immer an einem bestimmten Punkt des
Raumes nachgewiesen.
Die Wellenfunktion beschreibt die Wahrscheinlichkeit vor dem Nachweis, das Elektron an einem bestimmten Punkt zu finden.
Nach dem Nachweis ist das Elektron lokalisiert. Wenn wir zur Zeit t
das Elektron an einem bestimmten Punkt nachweisen, muss sich zur
Zeit t das Elektron in diesem Punkt befinden.
Die Wahrscheinlichkeit, das Elektron zur Zeit t an diesem
Punkt zu finden, muss gleich 100% sein.
Es folgt daraus, dass die Wellenfunktion sich spontan entsprechend
ändern wird, wenn das Elektron an einem bestimmten Punkt nachgewiesen wird. Wir sprechen von der Reduktion der Wellenfunktion.
Die Reduktion ist spontan, und wenn die Wellenfunktion vor dem
Nachweis sehr ausgedehnt war, dann muss sie spontan in einen Punkt
kollabieren.
Wenn wir die Wellenfunktion als eine räumlich ausgedehnte Welle
betrachten, würden wir sagen, dass während ihrer Reduktion sie sich
mit unendlicher Geschwindigkeit durch den Raum (d.h. schneller als
die Lichtgeschwindigkeit) bewegen muss.
Deshalb können wir die Wellenfunktion nicht als etwas betrachten,
das wirklich im Raum ausgedehnt ist.
623
Die Reduktion der Wellenfunktion ist noch heutzutage das am wenigsten verstandene Rätsel der Quantenmechanik. Einstein hat z.B. diese
Erklärung als nicht befriedigend betrachtet.
Physik
624
Quantenmechanik
Siehe Abb. 5.
Elektron durch Doppelspalt
Physik
λ
d
d
θ
Schirm
Intensität des Elektronstrahls
n = 0,1, 2,...
( Maxima)
625
Wir erwarten deshalb Interferenzstreifen (d.h. ein Beugungsmuster) auf dem Schirm, wenn der Abstand d zwischen den
Für d>>λ verschwindet der Beugungseffekt natürlich. Wir haben
z.B. eine solche Situation angetroffen, als wir den Einzelspalt studiert
haben. Siehe Kap. 12.7.4 und die entsprechenden Figuren.
wobei θ der Winkel zwischen dem Elektronenstrahl und der Normalen auf den Schirm ist.
sin θ = n
Damit in einem Punkt ein Maximum der Intensität entsteht, muss gelten (Siehe Kap. 12.7.3)
Figur 5. Das erzeugte Beugungsmuster, wenn Elektronen auf einen
Doppelspalt fallen.
Elektronstrahl
13.4 Elektron durch Doppelspalt
Wir haben bemerkt, dass ein Elektron (oder ein Photon) sich unter
bestimmten Umständen wie ein Teilchen oder wie eine Wellen verhält. Man spricht von Dualismus.
N. Bohr5, der bei der Entwicklung der Quantenmechanik eine
wesentliche Rolle spielte, hat ein Komplementaritätsprinzip ausgedrückt:
Für die vollständige Beschreibung eines Teilchens braucht
man sowohl den Wellen- als auch den Teilchenaspekt.
Wir können nun ein Experiment betrachten, bei dem sich der Wellenund der Teilchenaspekt gleichzeitig zeigen müssen.
Elektron durch Doppelspalt: Im Experiment fällt ein Elektronstrahl
auf einen Doppelspalt.
Wir nehmen an, dass die Elektronen mit Hilfe eines Schirms nachgewiesen werden. Wenn die Elektronen auf den Schirm fallen, werden
sie Licht erzeugen. Man kann durch die Intensität des Lichts auf dem
Schirm die räumliche Verteilung der Elektronen berechnen.
5. N. Bohr (1885-1962).
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
626
Quantenmechanik
h
=
p
hc
2m c 2 E
kin
Spalten ungefähr so gross wie die Elektronenwellenlänge λ
ist:
d ≈λ =
e
Für ein ruhendes Elektron, das durch einen Potentialunterschied von
10’000 Volt beschleunigt wird, ist die Wellenlänge ungefähr gleich
(Siehe Kap. 13.3.1) λ ≈ 1,23x10–11 m. Dann muss der Abstand zwischen den Spalten ungefähr so “klein” sein!
Im Jahre 1961 gelang es C. Jönsson, diesen Effekt direkt nachzuweisen.
Siehe Abb. 6.
Wie erwartet ist das Beugungsmuster dasselbe wie bei der Beugung
von Licht, wenn die Elektronen sich wie Wellen verhalten.
Figur 6. Beugungsmuster von Elektronen beim Doppelspaltexperiment. Das
Muster ist dasselbe wie bei der Beugung von Licht.
Doppelspaltexperiment - Ein Elektron nach dem anderen. Wir
nehmen nun an, dass einzelne Elektronen durch die Anordnung
gesendet werden. D.h., die Elektronen sind zeitlich so getrennt, dass
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Elektron durch Doppelspalt
sich zu einer bestimmten Zeit nur ein einzelnes Elektron in der Anordnung befindet.
Wir ersetzen den Schirm durch einen photographischen Film. Der
photographische Film wird einzelne Elektronen als kleine Punkte
nachweisen.
Beugungmuster mit 10 Elektronen.
Wenn wir 10 Elektronen durch die Spalten lassen, werden wir auf
dem Film z.B. das folgende Muster beobachten. Siehe Abb. 7.
Figur 7.
627
Wenn wir mehr Elektronen, ein Elektron nach dem anderen, durch
die Spalten lassen, werden wir den Aufbau der Interferenzstreifen
beobachten!
Siehe Abb. 8.
Physik
628
Quantenmechanik
100 Elektronen
1000 Elektronen
10000 Elektronen
Intensitätsverteilung
Exp. Resultat
Figur 8. Simulation des Aufbaus der Interferenzstreifen, wenn Elektronen
auf den photographischen Film fallen.
Nun können wir eine Frage über die Bahnkurve des Elektrons beantworten. Die Frage ist die folgende: durch welchen Spalt ist das Elektron gegangen?
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Unsch rferelation
Wir haben im Experiment angenommen, dass sich zu einer bestimmten Zeit nur ein einzelnes Elektron in der Anordnung befindet. Das
Experiment zeigt aber, dass auch in diesem Fall Interferenzstreifen
entstehen. Sie bilden sich langsam, in dem ein Elektron nach dem
anderen auf den Film trifft.
Wenn wir das Beugungsmuster in diesem Fall beobachten, folgt, dass
das Elektron mit sich selbst interferieren muss. D.h., die Wellenfunktion des Elektrons spürt beide Spalte.
Die Wellenfunktion des einzelnen Elektrons wird mit sich
selbst interferiren, und sie bestimmt wo mit welcher Warscheinlichkeit die Elektronen auf den Film gelangen.
Im Prinzip könnten wir vor jeden Spalt einen Elektronendetektor
platzieren, der beim Durchgang eines Elektrons z.B. ein elektronisches Signal erzeugt.
Wir könnten dann versuchen die Bahnen der einzelnen Elektronen zu
identifizieren. Sobald wir die Anordnung bauen, beobachten wir, dass
die Interferenzstreifen verschwunden sind. Beim Durchgang durch
die Spaltdetektoren werden die Elektronen so beinflusst, dass das
Interferenzmuster zerstrört wird.
Wenn wir die Beugung beobachten, können wir nicht sagen, welchen
Spalt das Elektron durchquert hat.
13.5 Die Unschärferelation
ψ ( x, t) = Ae i( kx −ωt ) = A cos( kx − ωt) + Ai sin( kx − ωt)
629
Wir haben in Kap. 13.3.3 gesehen, dass die (eindimensionale) Wellenfunktion eines freien Teilchen mit einem Impuls p die folgende ist
Physik
630
Quantenmechanik
wobei
p2
p2
= hω ⇒ ω =
2m
2 mh
p = hk ⇒ k = p / h
und E =
Das Teilchen besitzt einen bestimmten Impuls p. Wir bemerken, dass
die Lokalisierung eines solchen Teilchens unmöglich ist!
Wenn wir das Betragsquadrat der Wellenfunktion nehmen, beobachten wir, dass es zu jeder Zeit über den gesamten Raum konstant ist:
2
ψ ( x, t) = ψ *ψ = Ae i( kx −ωt ) A*e − i( kx −ωt ) = A 2 = konst.
D.h., harmonische ebene Wellen beschreiben ein Teilchen, das
räumlich und zeitlich unendlich ausgedehnt ist. Das Teilchen ist zu
jeder Zeit mit gleicher Wahrscheinlichkeit an jedem Ort des Raumes!
n
Ein lokalisiertes Teilchen kann nicht durch eine harmonische Welle
mit einer einzigen Kreisfrequenz ω und Wellenzahl k beschrieben
werden. Wir brauchen sogenannte Wellenpakete, die aus einer
Summe von ebenen Wellen bestehen:
n
ψ ( x, t) = ∑ψ n ( x, t) = ∑ An e i( kn x −ω n t )
wobei An die Amplitude der harmonischen Wellen mit Wellenvektor
kn und Kreisfrequen ωn ist.
Die Summe harmonischer Wellen führt zu einem lokalisierten Teilchen.
Wir beginnen mit einer kleinen Anzahl von Wellen. Die Amplituden
der Wellen wurden so gewählt, dass sie ein Maximum um einen Wellenvektor k besitzen.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Unsch rferelation
Die Summe von 3 harmonischen Wellen wird in Abb. 9 gezeigt. Mit
nur 3 Wellen ist die resultierende Welle nicht lokalisiert.
Figur 9. Wellenpakete: die resultierende Wellenfunktion ist die Summe der
3 gezeigeten Wellenfunktionen mit verschiedenen Amplituden und
Kreisfrequenzen.
631
In Abb. 10 betrachten wir die Summe von 5 harmonischen Wellen.
Die resultierende Welle besitzt verschiedene Maxima. Zwischen diesen Maxima verschwindet die resultierende Welle, weil die harmonischen Wellen einander auslöschen.
Physik
632
Wellenpakete: die Summe von 5 harmonischen Wellen.
Quantenmechanik
Figur 10.
Wenn die Anzahl der Terme in der Summe zunimmt, wird die resultierende immer mehr lokalisiert.
Die Summe von 9 harmonischen Wellen wird in Abb. 11 gezeigt.
Zusammenfassend haben wir gefunden, dass die Wellenfunktion
eines lokalisierten Teilchens gleich der Summe harmonischer Wellen
mit verschiedenen Wellenvektoren ist. Es folgt, dass ein lokalisiertes
Teilchen keinen bestimmten Impuls p besitzen kann.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Wellenpakete: die Summe von 9 harmonischen Wellen.
Die Unsch rferelation
Figur 11.
633
Wir ersetzen nun die Summe der harmonischen Wellen durch ein
Integral
ψ ( x, t) = ∫ dkA( k )e i( kx −ωt )
wobei A(k) die Verteilungsfunktion der Wellenvektoren ist.
Physik
634
Quantenmechanik
A( k ) ∝ e
−
4σ k2
( k − k0 ) 2
k
k
Die Amplituden A(k) wurden so gewählt, dass sie ein Maximum um
einen Wellenvektor k besitzen. Man kann z.B. eine Gauss-Verteilung
benutzen
k0
wobei σk die Standardabweichung ist. Siehe Abb. 12.
A(k)
k0
Figur 12. Gauss-Verteilung mit Mittelwert gleich k0 und
Standardabweichung gleich σk.
Man kann beweisen, dass ein Integral von harmonischen Wellen,
deren Amplituden eine Gauss-Verteilung haben, zu einem lokalisierten Teilchen mit einer räumlichen Gauss-Verteilung führt, und es gilt
k
1
σσ ≈
2
x
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Die Unsch rferelation
wobei σk und σx die Standardabweichungen der Gauss-Verteilungen
sind. Diese Beziehung gilt für eine Gauss-Verteilung. Für andere Verteilung ist das Produkt grösser als 1/2.
Für eine harmonische Welle ist σk =0 und deshalb ist σx unendlich.
Das Teilchen kann nicht lokalisiert werden!
Für ein unendlich gut lokalisiertes Teilchen, d.h. σx =0, ist σp unendlich. Es besitzt keinen bestimmten Impuls.
Die Standardabweichungen σk und σx entsprechen den
Genauigkeiten ∆k und ∆x, mit welchen man die Position oder
den Impuls des Teilchens gleichzeitig messen kann. Man kann
den Ortsvektor und den Impuls nicht gleichzeitig mit unendlicher Genauigkeit messen.
h
2
Heisenbergsche Unschärferelation
Diese Beziehung ist als die Unschärferelation von Heisenberg6
bekannt und wurde zuerst im Jahre 1926 formuliert:
∆x∆px ≥
Sie sagt aus, dass im Bereich der Quantenmechanik der Ortsvektorund der Impulsoperator eines Teilchens korreliert sind. Man sagt,
dass sie nicht kommutieren.
Entweder wollen wir die Position des Teilchens mit unendlicher
Genauigkeit messen, oder wir werden den Impuls messen.
635
Wenn wir zusätzlich die Position des Teilchens mit unendlicher
Genauigkeit messen, wird die Wellenfunktion so zerstört, dass der
Impuls nicht mehr definiert ist.
6. W. Heisenberg (1901-1976).
Physik
636
Quantenmechanik
In einer ähnlichen Weise ist die Position des Teilchens nicht mehr
definiert, wenn wir seinen Impuls mit unendlicher Genauigkeit messen.
Man kann diese Beobachtung noch einmal mit der Reduktion der
Wellenfunktion (Siehe Kap. 13.3.6) in Beziehung setzen.
wobei k = p / h und ω =
p2
2 mh
Wenn wir den Impuls p eines freien Teilchens mit unendlicher
Genauigkeit messen, wird die Wellenfunktion so kollabieren, dass sie
eine harmonische Wellen mit einem bestimmten Wellenvektor k wird
(Siehe Kap. 13.3.3):
ψ ( x, t) = Ae i( kx −ωt )
Das Betragsquadrat dieser Funktion ist, wie schon erwähnt, eine
Konstante über den ganzen Raum,
2
ψ ( x, t) = ψ *ψ = Ae i( kx −ωt ) A*e − i( kx −ωt ) = A 2 = konst.
und das Teilchen befindet sich in jedem Punkt des Raumes mit derselben Wahrscheinlichkeit.
Beispiel: ein freies 10 eV-Elektron bewegt sich in die x-Richtung
Geschwindigkeit vx ≈ 1,9 x 106 m/s
Impuls des Elektrons:
px = me v x = (9,11 × 10 −31 kg)(1, 9 × 10 6 m / s) ≈ 1, 7 × 10 −24 kgm / s
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
R ntgen- und Elektronenbeugung
h
1, 054 × 10 −34 Js
≈
≈ 3 × 10 −9 m
2 ∆px 2(1%)(1, 7 × 10 −24 kgm / s)
Wir nehmen an, dass wir die Geschwindigkeit auf 1% genau messen
können. Mit welcher Genauigkeit kann man gleichzeitig den Ort des
Elektrons messen?
∆x ≈
Das Ergebnis entspricht ungefähr 200 Atomsdurchmessern.
Beispiel: ein Golfball
h
1, 054 × 10 −34 Js
≈
≈ 3 × 10 −33 m
2 ∆px 2(1%)(1, 8 kgm / s)
Masse : 45g, Geschwindigkeit v=40m/s. Wir messen die Geschwindigkeit mit einer Genauigkeit von 1%.
∆x ≈
Diese Länge ist etwa 1018 mal kleiner als der Durchmesser des
Atomkerns!! Die Unschärferelation liefert bei makroskopischen
Objekten keine sinnvolle Grenze.
13.6 Röntgen- und Elektronenbeugung
13.6.1 Röntgenbeugung
637
Photonen fallen auf die Oberfläche eines Kristalls. Wir nehmen an,
dass im Kristall die Atome die fundamentalen Bausteine des Kristallgitters bilden, und dass das Gitter eine kubische Symmetrie hat.
Siehe Abb. 13.
Physik
638
Quantenmechanik
n
Photo
a
enwe
lle
Kristall
Figur 13. Ein Schnitt durch einen Kristall. Jedes Atom wird als ein Punkt
dargestellt.
Der Abstand zwischen zwei benachbarten Atomen ist a.
Analog zu einem Spalt betrachten wir jeden Punkt in der Abb. als
eine Quelle von Elementarwellen, d.h. jeder Punkt wirkt als ein Beugungszentrum.
Wir sind an der Abhängigkeit des Beugungsmusters von den Winkeln
der einfallenden und gebeugten Wellen interessiert.
Wir betrachten eine Ebene, die durch eine Reihe von Atomen geht.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
gebeugte Welle
acosθ
acosφ
einfallende Welle
R ntgen- und Elektronenbeugung
Siehe Abb. 14.
θ
a
φ
Atom
Figur 14. Die Photonenwelle fällt unter dem Winkel θ ein. Der Winkel
zwischen der Atomebene und den gebeugten Wellen ist gleich φ.
Relativ zu dieser Ebene fällt die Photonenwelle unter dem Winkel θ
ein, und der Winkel zwischen der Ebene und der gebeugten Welle ist
gleich φ.
639
Jedes Atom wirkt als Beugungszentrum. Die gebeugten Strahlen werden sich überlagern und ein Intensitätsmaximum wird erzeugt, wenn
Physik
640
Quantenmechanik
R ntgen- und Elektronenbeugung
θ =φ
hc 1, 24 × 10 −6 eV .m
≈
≈ 12400 eV
10 −10 m
λ
7. Bragg, W.H. (1862-1942) und Bragg, W.L. (1890-1971).
Physik
641
In Abb. 16 wird das erzeugte Interferenzmuster gezeigt, wenn ein
monochromatischer Röngtenstrahl auf ein kristallines Silber-Bromid
Pulver fällt.
d.h., die Photonen müssen im Bereich der Röntgenstrahlen sein.
E = hν =
Wir bemerken, dass die Wellenlänge der Photonen ungefähr so gross
wie der Abstand zwischen benachbarten Atomen des Gitters sein
muss. Wenn wir z.B. einen Abstand gleich 10–10 m betrachten, folgt
bei bestimmten Wellenlängen und bestimmter Orientierung
der einfallenden Photonenwelle konstruktive Interferenz der
gebeugten Photonenwelle beobachtet wird. Die Richtungen
der Interferenzmaxima wird durch die Geometrie des Kristallgitters bestimmt.
Es folgt, dass
Um eine konstruktive Interferenz in einer Richtung zu erreichen,
müssen sich die von den einzelnen Ebenen gebeugten Strahlen
verstärken. Dies bedeudet, dass der Gangunterschied zwischen
benachbarten Ebenen ein ganzzahliges Vielfaches der Wellenlänge
sein muss. Diese Bedingung heisst die Bragg7-Bedingung.
θ einfallende = φ gebeugte
Jede Ebene erzeugt eine gebeugte Welle, wobei
m = 0,1, 2, 3,...
der Gangunterschied zwischen benachbarten Strahlen gleich einem
ganzzahligen Vielfachen der Wellenlänge ist:
a cosθ − a cosφ = mλ
⇒
Das Hauptmaximum kommt bei m=0 vor. Diese Bedingung führt zu
a cosθ = a cosφ
D.h., die Ebene wirkt wie ein Spiegel.
Photonenwelle
gebeugte Welle
Wir betrachten nun verschiedene Ebenen durch die Atome. Wir nehmen an, dass die Photonenwelle nicht mehr nur auf eine einzelne
Ebene fällt, sondern auf die ganze Reihe von Ebenen.
Siehe Abb. 15.
Photonenwelle
gebeugte Welle
Atomenebene
Figur 15. Die Photonenwelle fällt auf die ganze Reihe von Ebenen. Eine
intensive Beugungswelle wird erzeugt.
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
642
Quantenmechanik
eug
l
trah
ter S
Man sieht charakteristische Beugungspunkte, die sich um den
Röntgenstrahl befinden. Diesen Punkten entsprechen die verschiedenen Ebenen von Atomen im Kristall.
Siehe Abb. 16.
geb
Kristall
Film
Interferenzmuster bei Beugung von Röntgenstrahlen an einem
Röntgenstrahl
Figur 16.
Kristall.
13.6.2 Elektronenbeugung
Davisson und Germer8 entdeckten zuerst im Jahr 1927 die Beugungsund Interferenzeffekte von Elektronen.
Bei ihrem Experiment wurden Elektronen auf einen Kristall (Nickeloder Goldkristall) geschossen. Die Elektronen wurden durch einen
variablen Potentialunterschied beschleunigt.
Siehe Abb. 17.
Kristall
R ntgen- und Elektronenbeugung
Schirm
18 cm
gebeugtes Elektron
Elektronenkanone
Elektronenstrahl
Figur 17. Illustration des Davisson-Germer-Experiments. Die Elektronen
wurden durch einen Potentialunterschied beschleunigt und auf einen
Kristall geschossen.
Mit diesem Experiment konnte man die Beugungsmuster eines Elektrons mit dem eines Photons vergleichen.
Wenn die Photonen und Elektronen dieselbe Wellenlänge besitzen,
werden sie änhliche Beugungsmuster erzeugen.
Siehe Abb. 18.
Anwendung: Elektronenmikroskop (E. Ruska, 1986)
Die Auflösung eines Mikroskops hängt von der Wellenlänge des
Strahls ab, der benutzt wird, um die Abbildung zu erzeugen. Weil das
Weil auch Elektronen Welleneigenschaften besitzen, kam die Vermutung auf, dass man auch Elektronen zur Abbildung von Objekten verwenden kann.
8. C.J. Davisson (1881-1958) und L. Germer.
Physik
643
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
644
4 cm
emittiert.
wobei
−13, 6 eV
n2
Eγ = hν = E1 − E 2
h2
E1 =
8 me d 2
wobei
⇔
n = 1, 2, 3,...
ν=
E1 − E 2
h
Die möglichen Energieniveaus werden in Abb. 19 dargestellt.
Physik
645
Beim Übergang des Elektrons von einem stationären Zustand mit
Energie E1 in einen stationären Zustand mit niedrigerer Energie E2
wird ein Photon der Energie
En =
N. Bohr schlug ein Modell des Wasserstoffatoms vor. Er postulierte,
dass die stabilen Bahnen des Elektrons im Wasserstoffatom, d.h. die
stationären Zustände des Elektrons, diskrete Energien besitzen:
Gegen Ende des 19. Jahrhunderts beobachtete man, dass Atome diskrete Lichtlinien unterschiedlicher Farbe emittieren. Die Wellenlängen-Abstände und Intensitäten der Linien sind für jedes chemische
Element charakteristisch.
13.7.1 Elektronen in Atomen
Es gibt viele andere Anordnungen, bei denen die Energie der stationären Zustände quantisiert ist.
wobei n=1,2,3,.. eine Quantenzahl ist.
E n = n 2 E1
Mehr Quantisierung
3
Quantenmechanik
2
Elektrons quantisiert war. D.h., die Energie des Elektrons kann nur
die folgenden Werte annehmen:
1
Das Beugungsmuster eines Elektronenstrahls.
0
Elektron geladen ist, kann man mit Hilfe von hohen Potentialunterschieden sehr kleine Wellenlängen erreichen. Es ist schwieriger Photonen mit solchen kleinen Wellenlängen zu erzeugen.
Figur 18.
13.7 Mehr Quantisierung
Im Kap. 13.3.2 haben wir ein Elektron in einem Kasten studiert. Wir
haben gesehen, dass als Folge der Randbedingungen, die Energie des
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
646
n=5
n=4
n=3
E
0
–.544
–.850
–1.51
n=2
n=1
–3.40
–13.6
Die Energieniveaus für ein Wasserstoffatom.
Quantenmechanik
Figur 19.
Das niedrigste Energieniveau ist der Grundzustand und ist für ein
Wasserstoffatom gleich –13,6 eV. Wenn n nach unendlich geht,
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Mehr Quantisierung
nimmt die Energie En den Maximalwert null für ein gebundenes
Elektron an.
Die Differenz zwischen den beiden Niveaus ist gleich der Energie,
die dem Elektron zugeführt werden muss, um es aus dem Atom zu
lösen. Diese Energie wird als Ionisierungsenergie bezeichnet.
Die vollständige Lösung des Wasserstoffatoms kann mit Hilfe der
Schrödinger-Gleichung gewonnen werden. Man nimmt an, dass das
Proton, d.h. der Kern des Atoms, sich in Ruhe befindet.
e2 1
4πε 0 r
Ein Elektron bewegt sich um den Kern mit der kinetischen Energie
Ekin=p2/2me und besitzt die potentielle Energie (Siehe Kap. 7.2.5)
E pot ( r) = −
Wasserstoffatom
Es folgt, dass die stationären Lösungen der Schrödinger-Gleichung
die folgende Differentialgleichung erfüllen: (Siehe Kap. 13.3.4)
r − h2 r 2 r
e2 1 r
Eφ ( r ) =
∇ φ (r ) −
φ (r )
2m
4πε 0 r
n = 1, 2, 3, 4,...
Hauptquantenzahl
l = 0,1, 2, 3,..., n − 1 Drehimpulsquantenzahl
magnetische Quantenzahl
m = − l, l + 1,..., 0,..., l − 1, l
647
Die Lösung dieser Gleichung führt zu drei unabhängigen Quantenzahlen, die als n, l und m bezeichnet werden. Diese Quantenzahlen
können beim Wasserstoffatom folgende Werte haben:
Physik
648
Quantenmechanik
wobei
E0 =
(4πε 0 )2
1
e 4 me
≈ 13, 6eV
2h2
Die Energie des Elektrons hängt nur von der Hauptquantenzahl ab:
E0
n2
Mehr Quantisierung
= 0, m =0
(a)
= 0, m =0
= 0, m =0
(b)
top view
z
(c)
top view
z
= 1, m =0
side view
n = 2,
(
e)
(f
top view
z
= 1, m = –1
side view
n = 2,
+8 zusätzliche Lösungen
= 1, m =1
side view
n = 2,
(i )
(d)
Die entsprechenden Wellenfunktionen sind in Abb. 20 gezeigt.
n = 1,
n = 2,
n = 3,
Physik
E = –13.6eV
En = −
Die radiale Abhängigkeit der Wellenfunktion hängt von n ab. Sie
bestimmt die Wahrscheinlichkeit, das Elektron in verschiedenen
Abständen vom Kern anzutreffen.
Die Quantenzahlen l und m entsprechen dem Bahndrehimpuls des
Elektrons. Man kann beweisen, dass der Drehimpuls L des Elektrons
durch
L = l( l + 1) h
gegeben ist. D.h., der Drehimpuls des Elektrons ist auch quantisiert!
Die magnetische Quantenzahl gibt die Komponente des Drehimpulses in einer bestimmten Richtung an.
n = 2, l = 0, m = 0
n = 2, l = 1, m = −1, 0,1
n = 1, l = 0, m = 0
Wir betrachten z.B. die folgenden Lösungen:
und
und
n = 3, l = 0, m = 0
n = 3, l = 1, m = −1, 0,1
n = 3, l = 2, m = −2, −1, 0,1, 2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
E = –3.40eV
E = –1.51eV
(g)
h)
649
650
Einige stationäre Zustände des Wasserstoffatoms.
Quantenmechanik
Figur 20.
1
πa03
e −r /a0
Wir betrachen z.B. den Grundzustand mit n=0, l=0 und m=0. Die
Wellenfunktion zeigt eine Kugelsymmetrie, d.h. sie hängt nur vom
Abstand r ab:
φ ( r) =
wobei a0 der sogenannte Bohr-Radius ist.
h2
a0 ≡ 4πε 0
≈ 0, 529 × 10 −10 m
me e 2
Die radiale Wahrscheinlichkeitsdichte wird definiert als die Wahrscheinlichkeit dafür, dass man das Elektron in einer Kugelschale mit
den Radien r und r+dr findet, dividiert durch dr. Für den Grundzustand ist sie gleich
4
φ 2 ( r) dV = φ 2 ( r)( 4πr 2 ) dr = 3 r 2e −2 r / a 0 dr
a0
wobei 4πr2dr das Volumen der Schale ist. Diese Funktion besitzt ein
Maximum bei r=a0. Wir sprechen nicht mehr von einer Bahn, die das
Elektron um den Kern beschreibt. Man hat eine Wahrscheinlichkeit
von 90%, das Elektron innerhalb einer Kugel mit Radius 2.7a0 zu finden. Die Frage nach der Grösse des Wasserstoffatoms ist deshalb
nicht sehr einfach zu beantworten.
Wir können nun den ersten angeregte Zustand (d.h. mit n=2) des
Wasserstoffatoms betrachten. Die Drehimpulsquantenzahl kann zwei
verschiedene Werte annehmen: l=0 oder 1. Wenn die Zahl verschieden von null ist, besitzt das Elektron einen Bahndrehimpuls. Seine
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Mehr Quantisierung
top
z
n = 2,
z
= 1, m =0
top
side
z
n = 2,
L
z
= 1, m = –1
Komponente entlang einer bestimmten Richtung wird durch die
magnetische Quantenzahl m gegeben.
L
L
side
Wellenfunktionen der ersten angeregten Zustände.
z
= 1, m =1
Siehe Abb. 21.
top
z
n = 2,
side
Figur 21.
13.7.2 Rotation und Vibration von Molekülen
651
Im Kap. 8.8 haben wir die Wärmekapazitäten von Gasen und
Festkörpern studiert.
Physik
652
Quantenmechanik
In niedrigen Temperaturbereichen konnten die Rotation und Schwingung von Gasmoleküle nicht angeregt werden. Die Rotations- und
Schwingungsfreiheitsgrade existieren nicht, sie sind eingefroren.
2
1
(I ω ) = L2 = l(l + 1)h2
I ω2 = ∆
2 ∆
2I∆
2I∆
2I∆
l = 0,1, 2,...
Wir können dieses Ergebnis durch die Quantisierung des Drehimpulses erklären. Die Rotationsenergie eines Moleküls kann mit Hilfe seines Trägheitsmoments ausgedrückt werden (Siehe Kap. 10.2.2):
E Rot =
l = 0,1, 2,...
wobei l die Quantenzahl des Drehimpulses ist. Diese Gleichung entspricht verschiedenen Rotationsenergieniveaus
E Rot ( l) = Bl( l + 1)
wobei B eine charakteristische Rotationsenergie des Moleküls ist.
Das Energieniveau mit l=1 entspricht der niedrigsten Rotationsenergie, bei der das Molekül rotiert.
Wenn die Temperatur T so klein ist, dass
kT << E Rot ( l = 1) = 2 B
wobei k die Boltzmann-Konstante ist, kann das Molekül nicht rotieren!
wobei ω = k / m
Eine ähnliche Situation gilt auch für die Schwingung des Moleküls.
Die Lösungen der Schrödinger-Gleichung für einen einfachen harmonischen Oszillator (Siehe Kap. 4.1.4) ergeben die Energieniveaus
1
EVib = n + hω
2
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das EPR-Paradoxon
wobei n=0,1,2,... die Schwingungsquantenzahl ist. Für den Übergang zwischen den Schwingungszuständen muss man mindestens die
Energie hν zuführen. Ein typischer Wert für ein Molekül ist
hν≈0,1 eV. Zum Vergleich ist bei Zimmertemperatur kT≈0,02 eV, und
die Schwingung des Moleküls kann nicht angeregt werden.
13.8 Das EPR-Paradoxon
Im Jahre 1935 haben Einstein, Podolsky und Rosen ein Gedankenexperiment vorgeschlagen. Sie betrachteten ein System, das aus zwei
Photonen besteht.
γ
Quelle
γ2
Zwei Photonen werden gleichzeitig von einer Quelle emittiert.
1
Die experimentelle Anordnung ist die folgende: eine Quelle emittiert
gleichzeitig und in entgegengesetzen Richtung zwei Photonen.
Figur 22.
Wir sind an der Polarisation der Photonen interessiert. Wir haben in
Kap. 12.5 gesehen, dass elektromagnetische Wellen polarisiert sein
können.
653
Die Polarisation muss einem internen Freiheitsgrad des Photons entsprechen. Wir sagen, dass
Physik
654
Quantenmechanik
die Polarisation der Welle dem Spin J der Photonen entspricht.
Weil es zwei unabhängige mögliche Polarisationen einer elektromagnetischen Welle gibt (d.h. z.B. vertikale oder horizontale Richtungen), kann der Spin des Photons nur zwei unabhängige Werte
annehmen.
Der Spin wird als ein Vektor betrachtet, der nur in Bewegungsrichtung oder in entgegengesetzer Bewegungsrichtung des Photons zeigen kann!
Bewegungsrichtung
z
z
Spin Jz=+1
Bewegungsrichtung
Spin Jz=–1
oder
J z = −1
Der Spin des Photons kann in zwei unabhängige Richtungen
Siehe Abb. 23.
γ
γ
Figur 23.
zeigen.
Diese Richtungen werden als
J z = +1
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das EPR-Paradoxon
bezeichnet.
Wenn ein Photon von der Quelle emittiert wird, nehmen wir an, dass
sein Spin in einer beliebigen Richtung zeigen kann (in Wirklichkeit
gibt es Regeln, die den Spin bestimmen). D.h., die entsprechende
elektromagnetische Welle ist nicht polarisiert.
Wenn zwei Photonen gleichzeitig emittiert werden, können ihre Spins
auch in einer beliebigen Richtung zeigen. Diese Spins sind aber korreliert!
D.h., es gibt nur eine Wellenfunktion, die beide Photonen und ihren
Spin beschreibt:
r
r
ψ ( r1, J z1, r2 , J z 2 , t)
wobei r die Ortsvektoren und Jz1, Jz2 die Spins der Photonen sind.
Wir nehmen an, dass sich beide Photonen durch den Raum bewegen
werden, und dass nach einer gewissen Zeit t, d.h., in einem Abstand
d=ct, die Polarisation eines der Photonen gemessen wird.
Der Spin eines Photons wird immer als +1 oder –1 gemessen. D.h.
der Spinvektor zeigt immer in die Bewegungsrichtungs des Photons
oder in entgegengesetzter Richtung dazu.
Wenn das Photon nicht polarisiert ist, ist die Wahrscheinlichkeit, das
Photon in einer gegebenen Spinrichtung zu beobachten, gleich 50%.
In 50% der Fälle wird der Spin in die Bewegungsrichtung gemessen,
und in den anderen 50% der Fälle wird er in entgegengesetzter Richtung gemessen.
655
Wenn wir den Spin des Photons messen, wird der Teil der Wellenfunktion, der den Spin beschreibt, kollabieren. D.h., nach dem Nachweis
Physik
656
Quantenmechanik
ist die Richtung des Spins bestimmt, und die Wellenfunktion muss
deshalb dieser Richtung entsprechen.
Wir betrachten nun die Messung des Spins beider Photonen. Jeder
Spin kann als +1 oder –1 gemessen werden.
Nun haben wir gesagt, dass beide Photonen, die gleichzeitig emittiert
werden, korreliert sind. Eine einzige Wellenfunktion beschreibt beide
Photonen.
D.h. die Messung eines Photons wird den Zustand des anderen Photons beeinflussen!
Dieser Einfluss ist spontan und wirkt immer, auch wenn die
Photonen sehr weit voneinander entfernt sind.
Man sagt, dass die Quantentheorie nicht lokal ist, d.h. die Messung in
einem bestimmten Ort des Raumes kann die Beobachtung in einem
anderen, a priori sehr entfernten Ort, spontan beeinflussen.
Dass eine solche nicht-lokale Wirkung tatsächlich existiert, wurde
vor kurzem noch einmal experimentell bewiesen.
Siehe Abb. 24.
In diesem Experiment wurden die nicht-lokalen Quantenkorrelationen zwischen Photonen mit einem Abstand von 10 km nachgewiesen!
Zwei Infrarot-Photonen werden erzeugt und durch optische Glasfasern ungestört in sehr entfernte Bereiche gebracht.
Die experimentellen Resultate sind in ausgezeichneter Übereinstimmung mit der Theorie!
Dies besagt, dass die Wellenfunktion beider Photon wirklich dieselbe
ist. Die Photonen bewegen sich mit beiden Spinzuständen bis einer
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Das EPR-Paradoxon
der Spins gemessen wird. Die Wellenfunktion kollabiert dann spontan und beeinflusst den Spin des anderen Photons. Dies passiert spontan, unabhängig von der Entfernung zwischen beiden Photonen.
r
se
La
P
R+R--
R++
R-+
km
4.5
&
k
8.1
nel
han
mc
ntu
qua
m
FL
9.3
km
ch
an
ne
l
7.3
km
qu
an
tum
KNbO3
Genev
a
Bell
evue
δ1
APD1 +
classicalchannels
δ2
APD2 +
Bernex
APD2-
APD1 -
Das sogenannte EPR-Paradoxon ist kein Widerspruch!
Physik
657
Figure 1 . Schematic setup to demonstrate quantum
correlations : pairs of correlated photons are produced
in Geneva and each of the twins routed through a
Swisscomfiber-optic network to analyzerslocated in
the villages of Bernexand Bellevue,respectively.The
results of the measurements are retransmitted to
Geneva, revealing the nonlocal quantum correlations.
10.9 km
658
Quantenmechanik
Figur 24. Das Experiment von Genf, um die Existenz von nicht-lokalen
Quantenkorrelationen zu beweisen.
13.9 Eine weitere Unschärferelation
Nach de Broglie hängt die Frequenz eines Teilches mit der Energie
über die Beziehung
E = hω
wobei k = p / h und ω =
p2
2 mh
zusammen. Wenn wir nun eine harmonische Welle betrachten, sehen
wir dieselbe Symmetrie zwischen Ortsvektor und Wellenvektor wie
zwischen Kreisfrequenz und Zeit:
ψ ( x, t) = Ae i( kx −ωt )
h
2
Heisenbergsche Unschärferelation
Diese Symmetrie führt zu einer zusätzlichen Unschärferelation für
die Energie und die Zeit:
∆E∆t ≥
D.h., es ist unmöglich die Energie E während eines Zeitintervalls ∆t
mit einer Genauigkeit kleiner als ∆E, zu messen.
Wenn wir sehr kurze Zeitintervalle betrachten, können wir nicht mehr
sagen, ob die Energie wirklich erhalten wird, weil es nicht mehr möglich ist, die Energie mit unendlicher Genauigkeit zu definieren.
Man kann sagen, dass die Energie eines Systems nicht erhalten werden muss, solange wir die Verletzung der Energieerhaltung nicht
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia
Eine weitere Unsch rferelation
messen können! D.h., die Energieerhaltung kann während sehr kurzen Zeitintervallen verletzt werden.
h
h
≈
2 ∆E 2( M 0c 2 )
Eine interessante Folge ist, dass das Vakuum nicht wirklich “leer” ist.
Es wirken sogenannte Quantenfluktuationen des Vakuums, bei
denen Elementarteilchen aus dem Vakuum während sehr kurzen Zeitintervallen erzeugt werden. Die Erzeugung dieser Teilchen der
Gesamtmasse M0 würde im Prinzip zu einer Verletzung der Energieerhaltung führen. Wenn diese Teilchen nur während dem Zeitintervall
∆t leben und sich nacher vernichten, wobei
∆t ≈
gilt, kann diese Verletzung der Energieerhaltung nicht bemerkt werden.
659
Solche Effekte wurden experimentell nachgewiesen, und sie beweisen noch einmal, dass die Konzepte der Quantentheorie eine richtige
Beschreibung der Natur ergeben.
Physik
660
Quantenmechanik
Physik I&II, WS 00/01-SS01, Prof. A. Rubbia