Electronics4you Skript Schueler 2011
Werbung

Praktikumsunterlagen
7. März 2011
Vorwort
Liebe Leserin, lieber Leser
Im Frühjahr 2009 wurde der Kurs Elektronics4you an der HSR Hochschule für Technik
Rapperswil lanciert. Der Kurs soll Jugendlichen in der Berufsentscheidung eine Möglichkeit
bieten, um den Beruf des Elektronikers kennen zu lernen.
Dieses Dokument dient als Unterstützung und Ergänzung zum Kurs Electronics4you. Es
ist speziell für OberstufenschülerInnen ohne Vorkenntnisse in der Elektrotechnik verfasst worden. Aus verständlichen Gründen liegt der Schwerpunkt nicht auf der Vertiefung der Theorie.
Vielmehr geht es darum, Grundlegendes zu vermitteln und die Vielfältigkeit der Elektronik
aufzuzeigen. Dieses Dokument beinhaltet elektrotechnische Grundlagen wie das Ohmsche
Gesetz, Beschreibungen der elektronischen Bauteile sowie Theorie zur Handlöttechnik. Nebst
theoretischen Grundlagen sind auch die praktischen Projekte beschrieben. Das Dokument ist
so strukturiert, dass zu jedem Theorieblock eine praktische Übung folgt. Als Zusatzaufgabe
werden sehr knifflige und herausfordernde Aufgaben gestellt, welche fakultativ und mit
Unterstützung der Betreuer gelöst werden können.
Nun wünschen wir der Leserin, dem Leser viel Vergnügen beim Studieren des Dokumentes und hoffen, das Interesse an der Elektronik zu wecken.
Rapperswil, 7. März 2011
Nicola Ramagnano & Flurin Looser
Dieses Werk ist unter einer Creative Commons-Lizenz lizenziert.
Weitere Details unter: http://creativecommons.org/licenses/by-nc-sa/2.5/ch/
©2009-2011 - HSR Hochschule für Technik Rapperswil, www.electronics4you.hsr.ch
HSR Hochschule für Technik Rapperswil
Inhaltsverzeichnis
I
Erstes Semester
1 Wechselblinker
1.1 Funktionsbeschreibung
1.2 Bauteile . . . . . . . .
1.3 Bauanleitung . . . . .
1.4 Zusatzaufgabe . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Löttechnik
2.1 Tipps und Tricks zum Thema Löten .
2.1.1 Vorbereitungen . . . . . . . .
2.1.2 Lötvorgang . . . . . . . . . .
2.1.3 Bauteile . . . . . . . . . . . .
2.2 Widerstandswürfel . . . . . . . . . .
2.2.1 Zusatzaufgabe . . . . . . . . .
2.3 LED-Blitzer . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
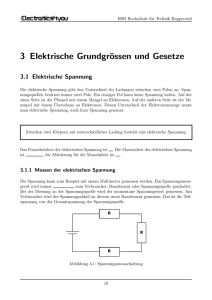
3 Elektrische Grundgrössen und Gesetze
3.1 Elektrische Spannung . . . . . . . . . . . . .
3.1.1 Messen der elektrischen Spannung . .
3.2 Elektrischer Strom . . . . . . . . . . . . . .
3.2.1 Messen des elektrischen Stroms . . .
3.3 Spannung und Strom . . . . . . . . . . . . .
3.4 Elektrischer Widerstand . . . . . . . . . . .
3.4.1 Messen des Ohmschen Widerstandes
3.5 Elektrische Leistung . . . . . . . . . . . . .
3.6 Elektrische Arbeit / Energie . . . . . . . . .
3.7 Ohmsches Gesetz . . . . . . . . . . . . . . .
3.7.1 Strom - Spannungs - Kennlinie . . .
3.8 Kirchhoffsche Regeln . . . . . . . . . . . . .
3.8.1 Knotenregel . . . . . . . . . . . . . .
3.8.2 Maschenregel . . . . . . . . . . . . .
3.9 Gefahren des elektrischen Stroms . . . . . .
3.9.1 FI-Schalter . . . . . . . . . . . . . .
3.9.2 Sicherung . . . . . . . . . . . . . . .
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
4
4
.
.
.
.
.
.
.
5
5
6
6
7
8
8
9
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
10
10
10
11
12
12
13
13
14
14
15
15
16
16
17
19
19
20
HSR Hochschule für Technik Rapperswil
4 Bauteile kennenlernen
4.1 Widerstand . . . . . . . . . . . . . . .
4.1.1 Serie- und Parallelschaltung von
4.2 Potentiometer . . . . . . . . . . . . . .
4.3 Kondensator . . . . . . . . . . . . . . .
4.3.1 Serie- und Parallelschaltung von
4.4 Diode . . . . . . . . . . . . . . . . . .
5 Projekt Soundbox
5.1 Funktion des Speisungsteils . . . .
5.1.1 Der Transformator . . . . .
5.1.2 Der Gleichrichter . . . . . .
5.1.3 Die Spannungsstabilisierung
5.2 Audioverstärker . . . . . . . . . . .
5.2.1 Lautstärkeregelung . . . . .
5.2.2 Vorverstärker . . . . . . . .
5.2.3 Leistungsverstärker . . . . .
5.3 Mechanische Fertigung . . . . . . .
5.3.1 Crimpverbindung . . . . . .
5.3.2 Schraubverbindung . . . . .
5.3.3 Schrumpfschlauch . . . . . .
5.3.4 Montageunterlagen . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . .
Widerständen .
. . . . . . . . .
. . . . . . . . .
Kondensatoren
. . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 GPS-Gerät mit u-blox Modul
6.1 Was ist GPS? . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Grundfunktion . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Wie wird die Position bestimmt? . . . . . . . . . . . . . . . . . .
6.2.1 Zweidimensionale Positionierung . . . . . . . . . . . . . . .
6.2.2 Dreidimensionale Positionierung . . . . . . . . . . . . . . .
6.2.3 Wieviele Satelliten sind notwendig für eine Position? . . .
6.3 GPS Empfänger . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Schemas und Bestückungspläne . . . . . . . . . . . . . . .
6.3.2 Installation der Software u-center . . . . . . . . . . . . . .
6.3.3 Aufzeichnen der Positionsdaten mit dem u-center . . . . .
6.3.4 Anzeigen des zurückgelegten Weges in Google Map/Earth
6.3.5 AssistNow Offline Satellitendaten aktualisieren . . . . . . .
6.3.6 Firmware Update des GPS-Moduls . . . . . . . . . . . . .
6.3.7 Aufzeichnen der Positionsdaten mit der Zusatzschaltung .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
21
22
22
23
23
24
.
.
.
.
.
.
.
.
.
.
.
.
.
26
26
26
27
29
29
29
30
30
30
30
31
31
32
.
.
.
.
.
.
.
.
.
.
.
.
.
.
36
36
36
37
38
38
38
39
39
43
43
43
44
44
45
7 Relaisschaltungen
46
7.1 Aufgabe 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2 Aufgabe 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8 Elektrosmog, GSM Detektor
49
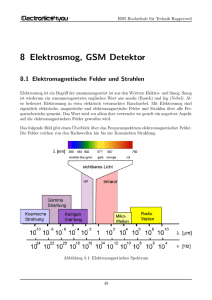
8.1 Elektromagnetische Felder und Strahlen . . . . . . . . . . . . . . . . . . . . . . 49
8.1.1 Tiefe Frequenzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.1.2 Mittlere Frequenzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
ii
HSR Hochschule für Technik Rapperswil
8.1.3
8.1.4
8.2 GSM
8.2.1
8.2.2
8.2.3
Licht . . . . . . . . . . . . . . . . . .
Hohe Frequenzen . . . . . . . . . . .
Detektor . . . . . . . . . . . . . . . . .
Die Geschichte von GSM . . . . . . .
Bauanleitung . . . . . . . . . . . . .
Funktionstest des Mobilfunkdetektors
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
51
51
52
52
53
54
II Zweites Semester
55
9 Regelungstechnik
56
10 FM Radiosender
58
10.1 Bau eines UKW/FM-Radiosender . . . . . . . . . . . . . . . . . . . . . . . . . . 59
10.2 UKW-Minisender: Rechtliche Grundlagen . . . . . . . . . . . . . . . . . . . . . . 60
11 Büchsen und andere Antennen
61
11.1 Weitere Antennenformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
11.2 Büchsenantenne bauen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
12 Digitale Logikschaltungen
12.1 Binäres Zahlensystem . . . .
12.2 Schaltalgebra . . . . . . . .
12.3 Praxisbeispiel: Alarmanlage
12.3.1 Veroboard-Layout . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
66
67
67
69
70
13 Mikrocontroller
13.1 Programmierung des Mikrocontrollers . . .
13.1.1 Die Struktur eines C-Programms .
13.2 Funktionen aus System.h . . . . . . . . .
13.3 Grundlegende Datentypen und Operatoren
13.4 Das Mikrocontrollerboard . . . . . . . . .
13.4.1 Die Hardware . . . . . . . . . . . .
13.4.2 Die Programmierumgebung . . . .
13.4.3 Dein erstes Programm . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
72
73
73
75
76
78
78
80
81
.
.
.
.
.
.
87
87
87
87
90
90
91
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14 Mee Controller
14.1 Mee Controller . . . . . . . . . . . . .
14.1.1 Blockschaltbild Mee Controller
14.1.2 Beschleunigungssensor . . . . .
14.2 Mee Receiver . . . . . . . . . . . . . .
14.2.1 Blockschaltbild Mee Receiver .
14.3 USB Interface . . . . . . . . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
HSR Hochschule für Technik Rapperswil
Teil I
Erstes Semester
1
HSR Hochschule für Technik Rapperswil
1 Wechselblinker
1.1 Funktionsbeschreibung
Der Wechselblinker ist eine astabile Kippstufe, welche mit zwei Transistoren zwei LEDs abwechslungsweise blinken lässt. Die Transistoren sind so durch zwei Elektrolytkondensatoren
(Elkos) gekoppelt, dass jeweils ein Kondensator geladen, der andere entladen wird. Für die
Dauer der Lade-/Entladezeit wird jeweils ein Transistor durchgeschaltet, der andere gesperrt.
Wenn die Schwellenspannung des gesperrten Transistors (Basisspannung = 0.7 Volt) erreicht
wird, kippt der Zustand um. Es leuchtet also stets eine LED, die andere ist dunkel. Dieser Vorgang wiederholt sich fortlaufend und die Leuchtdioden blinken wechselweise. Die Blinkfrequenz
wird durch die Widerstände und Kondensatoren bestimmt.
Abbildung 1.1: Schaltplan Wechselblinker
Name
Bezeichnung
Wert / Typ
Baugrösse
Lieferant, Art.Nr.
R1, R4
R2, R3
C1, C2
T1, T2
D1
D2
Bat
Widerstand
Widerstand
Kondensator
Transistor
Leuchtdiode (LED)
Leuchtdiode (LED)
Batterie
Lötnagel
Batteriekabel
560 Ω
120 kΩ
10 µF / 25 V
BC547B
rot
grün
9V
0207
0207
5×11
TO-92
5mm
5mm
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
9V
Tabelle 1.1: Stückliste Wechselblinker
2
714083
714153
800635
610007
251534
251536
970139
450202
300862
HSR Hochschule für Technik Rapperswil
1.2 Bauteile
Der Wechselblinker beinhaltet verschiedene elektronische Bauteile, jedes Bauteil wird im Schaltplan durch ein Symbol dargestellt. In der folgenden Tabelle kannst du zu jedem Bauteil das
Schaltsymbol skizzieren.
Bauteil
Schaltsymbol
Formelzeichen
Widerstand
Kondensator
Batterie
Leuchtdiode (LED)
Transistor (NPN)
Tabelle 1.2: Schaltsymbole
Bei den folgenden Bauteilen, welche beim Wechselblinker eingesetzt werden, muss die Polarität
beachtet werden:
• Batterie
• Leuchtdiode (LED)
• Elektrolytkondensator
• Transistor
3
HSR Hochschule für Technik Rapperswil
1.3 Bauanleitung
Der Wechselblinker wird als Brettschaltung realisiert. Auf einer 100 × 100 mm grossen Holzplatte werden Lötnägel nach folgendem Plan gesetzt.
Abbildung 1.2: Wechselblinker Lötnägel
Diesen Plan kannst du aus einem separat abgegebenen Blatt ausschneiden und mit Klebeband
auf dem Holz befestigen. Bei jedem Kreuz wird ein Lötnagel mit einem kleinen Hammer durchs
Blatt ins Holz schlagen. Anschliessend werden die elektronischen Bauteile nach dem Schaltplan
bestückt. Bei Linien ohne Bauteile kannst du zum Verbinden ein Stück Draht verwenden. Am
Schluss muss das Kabel für die Speisung angelötet und die Batterie angeschlossen werden.
1.4 Zusatzaufgabe
Überlege dir wie der Wechselblinker funktioniert, lese dazu nochmals die Funktionsbeschreibung
der Schaltung durch. Wie gross ist der Strom durch die LED1? Zeichne nun den Strom durch
die LED1 ins Diagramm ein. Beschrifte die Achsen.
Abbildung 1.3: Zeitdiagramm Wechselblinker
4
HSR Hochschule für Technik Rapperswil
2 Löttechnik
2.1 Tipps und Tricks zum Thema Löten
Beim Löten werden metallische Werkstoffe mittels eines Lotes verbunden. Dabei wird die Oberfläche der Grundwerkstoffe (Metalle, z.B. Kupfer) beim Löten mit einem Lot benetzt. Durch
Adhäsion und Diffusion entsteht so ein rein metallischer Kontakt zwischen Lot und Grundwerkstoff.
• Adhäsion: Haftung von Stoffen (z.B. Wasser auf Glas)
• Diffusion: Molekulare Durchmischung von zwei Stoffen
Die Oberfläche der Grundwerkstoffe ist häufig mit einer Oxydschicht bedeckt. Diese verhindert das Fliessen und Diffundieren des Lotes. Somit muss die Lötstelle vor dem eigentlichen
Lötvorgang gereinigt werden. Diese Aufgabe übernehmen Flussmittel, die meistens im Lot eingeschlossen sind, wie dies in Abbildung 2.1 zu sehen ist.
Abbildung 2.1: Lötzinn mit fünf Flussmittelseelen
In der Elektronik werden hauptsächlich Lote aus Zinn-Legierungen verwendet, daher der Name
“Lötzinn”. Elektronik-Lote werden hauptsächlich in zwei Gruppen unterteilt: solche die Blei
enthalten und andere die frei von Blei sind. Eine typische Zinn/Blei-Legierung, die sich bis heute
als Lot in der Elektronik bewährt hat, ist Sn60Pb40 (60% Zinn, 40% Blei). Diese Legierung
hat den Vorteil, dass sie einen tiefen Schmelzpunkt hat. Jedoch dürfen bleihaltige Lote seit Juli
2006 nicht mehr in der Produktion von elektronischen Geräten eingesetzt werden. Die bleifreien
Zinn-Lote sind wohl besser für die Umwelt, haben aber einen höheren Schmelzpunkt, wie dies in
Tabelle 2.1 gezeigt wird. Eine höhere Löttemperatur wirkt sich nachteilig auf die Lebensdauer
der elektronischen Bauteile aus.
5
HSR Hochschule für Technik Rapperswil
Legierung
Schmelzpunkt
Sn60/Pb40
Sn99/Cu1
Sn95,5/Ag3,8/Cu0,7
183°C
227°C
217°C
Tabelle 2.1: Am meisten eingesetzte Zinn-Legierungen für Lote
2.1.1 Vorbereitungen
Der Arbeitsplatz soll immer in einem ordentlichen und sauberen Zustand sein. Die Hände sollen
vor und nach dem Löten gewaschen werden. Erstens weil durch Fett, Obstsäuren oder Handschweiss die Lötstellen korrodieren können und zweitens um mögliche Lot- oder Flussmittelreste
an den Händen zu entfernen.
Zu den wichtigsten Werkzeugen gehört eine Lötstation mit Lötkolben und passender Lötspitze.
Zudem braucht es einen Lötkolbenhalter mit einem Schwamm, der zur Lötspitzenreinigung
dient. Der Schwamm soll nur feucht, aber nicht nass sein. Zu den weiteren Werkzeugen gehören
z.B. ein Seitenschneider, eine Pinzette und evtl. eine Biegelehre. Für die Enfernung des Lotes
beim Entlöten von Bauteilen eignet sich zudem eine Entlötlitze.
a)
b)
Abbildung 2.2: a) Lötstation mit Lötkolben und -halter, b) Entlötlitze
2.1.2 Lötvorgang
Während dem eigentlichen Lötvorgang müssen folgende Punkte unbedingt eingehalten werden,
um eine einwandfreie Lötstelle zu erzielen:
1. Voraussetzung für eine gute Lötstelle sind eine geeignete Lötspitzengrösse und eine geeignete Löttemperatur. Die Löttemperatur soll zwischen
betragen.
2. Die Oberfläche der Lötteile soll frei von Verunreinigungen und Oxydschichten sein.
6
HSR Hochschule für Technik Rapperswil
3. Lötteile nach Möglichkeit mechanisch fixieren. Mechanische Belastungen nach dem Löten
müssen vermieden werden.
4. Mit sauber verzinnter Lötkolbenspitze beide Lötteile gleichzeitig unter Zugabe von wenig
Lötzinn auf Arbeitstemperatur erwärmen (max. 2 Sekunden).
5. Wenig Lötzinn zuführen und Lötdraht rasch entfernen.
6. Geschmolzenes Lot fliessen lassen (max. 2 Sekunden) und Lötkolben mit einer Wischbewegung zurückziehen.
7. Zinn erschütterungsfrei erstarren lassen.
Eine gute Lötstelle sollte konkav und homogen sein. Es können unter gewissen Umständen
kalte Lötstellen entstehen, welche eine mangelhafte mechanische und elektrische Verbindung
aufweisen. Solche schlechten Lötstellen entstehen, wenn z.B. die Löttemperatur zu niedrig ist
und das Lot die Werkstückoberfläche nicht richtig benetzen kann. Auch oxydierte Oberflächen
führen zu kalten Lötstellen.
2.1.3 Bauteile
Grundsätzlich unterscheidet man zwischen zwei Bauteilarten: es gibt die konventionellen Bauteile, auch “Through Hole Technology” (THT) genannt; und die Oberflächen montierte Bauteile,
auch “Surface Mounted Device” (SMD) genannt. Bei SMD werden die Bauteile direkt auf die
Oberfläche der Leiterplatte gelötet. Wohingegen die konventionellen Bauteile durch den Print
gesteckt und gelötet werden. In der untenstehenden Abbildung 2.3 werden für beide Technologien gute und schlechte Lötstellen gezeigt.
THT Bauteile
gute Lötstelle (konkav)
schlechte Lötstelle (konvex)
SMD Bauteile
gute Lötstelle (konkav)
schlechte Lötstelle (konvex)
Abbildung 2.3: Vergleich von Lötstellen
7
HSR Hochschule für Technik Rapperswil
2.2 Widerstandswürfel
Bei der nächsten Aufgabe kann man die eben gelernten Löt-Tipps praktisch ausprobieren.
Benötigt werden 12 Widerstände, dessen Beinchen alle gleich lang abgeschnitten werden müssen.
Die Widerstände sollen nun, wie in Abbildung 2.4 gezeigt, zu einem 3-dimensionalen Würfel
zusammengelötet werden.
Tipp: Es geht am besten wenn man zu zweit an einem Würfel arbeitet, einer hält die Widerstände mit zwei Zangen fest und der andere lötet die Eckpunkte zusammen.
Abbildung 2.4: Widerstandswürfel
2.2.1 Zusatzaufgabe
Alle 12 Widerstände haben einen Wert von 120 Ω. Gefragt ist nun der Ersatzwiderstand gemessen über die Raumdiagonale des Würfels.
Ersatzwiderstand:
Tipp: Nütze die Symmetrie des Würfels aus um die Schaltung zuerst zu vereinfachen. Am
Schluss resultieren nur reine Serie- und Parallelschaltungen von Widerständen.
8
HSR Hochschule für Technik Rapperswil
2.3 LED-Blitzer
Der LED-Blitzer ist eine Schaltung, die eine Leuchtdiode (LED) immer wieder kurz aufblitzen
lässt. Speziell an dieser Schaltung ist, dass sie sehr wenig Strom benötigt und auch mit einer
9V-Batterie, die bereits als leer angenommen wird, noch sehr lange läuft.
http://www.elektronik-kompendium.de/sites/praxis/bausatz_led-blitzer.htm
Das entsprechende Schema dieser Schaltung ist in Abbildung 2.5a dargestellt. Eine Liste aller
eingesetzten Komponenten findet man in der Tabelle 2.2. Wie man im Print-Layout in Abbildung 2.5b sehen kann, wurde der LED-Blitzer ausschliesslich mit SMD Bauteilen realisiert.
a) Schema
b) Layout
Abbildung 2.5: LED-Blitzer
Name
Bezeichnung
Wert/Typ Baugrösse
Lieferant, Art.Nr.
R1
R2
R3
D1
D2
T1
T2
C1
Chip-Widerstand
Chip-Widerstand
Mini-Melf Widerstände
Silizium-Diode
Leuchtdiode (LED)
NPN-Transistor
PNP-Transistor
Tantal Kondensator
Batteriehalter 9V
330 kΩ
5.6 kΩ
680 Ω
SM 4001
grün
BC847C
BC857C
100 µF
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
1206
1206
Mini-MELF
MELF
1206
SOT-23
SOT-23
D
Tabelle 2.2: Stückliste des LED-Blitzers
9
711322
711301
713070
601624
254566
610383
611590
811011
970038
HSR Hochschule für Technik Rapperswil
3 Elektrische Grundgrössen und Gesetze
3.1 Elektrische Spannung
Die elektrische Spannung gibt den Unterschied der Ladungen zwischen zwei Polen an. Spannungsquellen besitzen immer zwei Pole. Ein einziger Pol kann keine Spannung haben. Auf der
einen Seite ist der Pluspol mit einem Mangel an Elektronen. Auf der anderen Seite ist der Minuspol mit einem Überschuss an Elektronen. Diesen Unterschied der Elektronenmenge nennt
man elektrische Spannung, auch kurz Spannung genannt.
Zwischen zwei Körpern mit unterschiedlicher Ladung besteht eine elektrische Spannung.
Das Formelzeichen der elektrischen Spannung ist . Die Masseinheit der elektrischen Spannung
ist
, die Abkürzung für die Masseinheit ist .
3.1.1 Messen der elektrischen Spannung
Die Spannung kann zum Beispiel mit einem Multimeter gemessen werden. Ein Spannungsmessgerät wird immer
zum Verbraucher, Bauelement oder Spannungsquelle geschaltet.
Bei der Messung an der Spannungsquelle wird der momentane Spannungswert gemessen. Am
Verbraucher wird der Spannungsabfall an diesem einen Bauelement gemessen. Das ist die Teilspannung von der Gesamtspannung der Spannungsquelle.
Abbildung 3.1: Spannungsmessschaltung
10
HSR Hochschule für Technik Rapperswil
Um die zu messende Schaltung nicht zu beinflussen, sollte der Innenwiderstand des Messgerätes
möglichst hochohmig sein. Beim Messen mit dem Spannungsmessgerät sind die folgenden Hinweise zu beachten:
•
•
•
3.2 Elektrischer Strom
Der elektrischer Strom ist die gezielte und gerichtete Bewegung freier Ladungsträger. Die Ladungsträger können Elektronen oder Ionen sein. Der elektrische Strom kann nur fliessen, wenn
zwischen zwei unterschiedlichen elektrischen Ladungen genügend freie und bewegliche Ladungsträger vorhanden sind. Zum Beispiel in einem leitfähigen Material. Folgende Materialien sind
gute Leiter:
•
•
•
•
Verbindet man Minuspol und Pluspol einer Spannungsquelle durch einen Leiter miteinander,
so fliessen Elektronen vom Minuspol zum Pluspol. Es entsteht ein Strom, der umso grösser
ist, je mehr Elektronen bewegt werden. Das ist die Elektronenstromrichtung. Als technische
Stromrichtung ist jedoch die Richtung vom Pluspol zum Minuspol festgelegt.
Elektrischer Strom fliesst vom Pluspol zum Minuspol.
Das Formelzeichen des elektrischen Stroms ist . Die Masseinheit des elektrischen Stromes ist
, die Abkürzung für die Masseinheit ist .
11
HSR Hochschule für Technik Rapperswil
3.2.1 Messen des elektrischen Stroms
Der elektrische Strom kann zum Beispiel mit dem Multimeter gemessen werden. Das Stromzum Verbraucher angeschlossen. Dazu muss die Leitung des
messgerät wird immer
Stromkreises unterbrochen werden, um das Messgerät in den Stromkreis einfügen zu können.
Während der Messung muss der Strom durch das Messgerät fliessen.
Abbildung 3.2: Strommessschaltung
Der Innenwiderstand des Messgerätes sollte möglichst niederohmig sein, um den Stromkreis
nicht zu beeinflussen. Beim Messen mit einem Strommessgerät sind folgende Hinweise zu beachten:
•
•
•
Praxis - Tipp: Ist der Stromkreis nur schwer zugänglich oder darf nicht aufgentrennt werden,
so ist die Spannung an einem bekannten Widerstand im Stromkreis zu messen. Danach
kann mit Hilfe des Ohmschen Gesetzes der Strom berechnet werden. Wird der Strom über
dieses Verfahren ermittelt, wird der Widerstand über den die Spannung gemessen wird,
Shuntwiderstand oder kurz Shunt genannt.
3.3 Spannung und Strom
Die elektrischen Grössen Spannung und Strom können mit einem Wasserkreislauf verglichen
werden. Die elektrische Spannung ist analog zum Wasserdruck. Der elektrische Strom ist analog zum Wasserfluss, also dem Wasser das sich verschiebt. Der Wasserdruck ist die Ursache,
dass Wasser fliesst. Ist kein Druckunterschied vorhanden, fliesst auch kein Wasser. Ebenso ist
im elektrischen Kreis die Spannung die Ursache, dass der Strom fliesst. Ist keine Spannung
vorhanden fliesst auch kein Strom.
Die folgende Tabelle gibt einen Überblick über die Grössenordungen von Spannungen und
Strömen.
12
HSR Hochschule für Technik Rapperswil
System
Spannung
Strom
Nervensystem:
Batterie:
Steckdose:
Hochspannungsleitung:
Gewitter:
Tabelle 3.1: Grössenordnungen von Spannungen und Ströme
3.4 Elektrischer Widerstand
Die Bewegung freier Ladungsträger im Inneren eines Leiters hat zur Folge, dass freie Ladungsträger gegen Atome stossen und in ihrem Fluss gestört werden. Diesen Effekt nennt man einen
Widerstand! Durch diesen Effekt hat der Widerstand die Eigenschaft, den Strom in einer Schaltung zu begrenzen.
Der elektrische Widerstand wird auch als ohmscher Widerstand bezeichnet. In der Elektronik
spielen Widerstände eine sehr grosse Rolle. Neben den klassischen Widerständen hat jedes Bauteil einen Widerstandswert, der Einfluss auf Spannungen und Ströme in Schaltungen nimmt.
Das Formelzeichen des elektrischen Widerstandes kommt vom englischen Begriff Resistor was
auf deutsch Widerstand bedeutet. Das Formelzeichen ist . Die Masseinheit des elektrischen
Widerstandes ist
, die Abkürzung für die Masseinheit ist .
3.4.1 Messen des Ohmschen Widerstandes
Der Wert des Ohmschen Widerstandes wird am besten mit einem digitalen Multimeter ermittelt, um Ablesefehler und Ungenauigkeiten zu verhindern.
Abbildung 3.3: Widerstandmessschaltung
Beim Messen mit einem Widerstandsmesser sind folgende Hinweise zu beachten:
•
•
13
HSR Hochschule für Technik Rapperswil
Die folgende Tabelle gibt dir einen Überblick über die Grössenordungen von Widerständen.
System
Widerstand
Kurze elektrische Leitungen:
Leitungen im Kraftfahrzeug:
Leitungen im Haushalt:
Lampen, Haushaltgeräte:
Elektronik Widerstände:
Isolationswiderstände:
Tabelle 3.2: Grössenordnungen von Widerständen
3.5 Elektrische Leistung
Die elektrische Leistung ist das Produkt aus Spannung und Strom.
P =U ·I
Das Formelzeichen der elektrischen Leistung ist . Die Masseinheit der elektrischen Leistung
ist
, die Abkürzung für die Masseinheit ist .
Pferdestärke: Eine andere Masseinheit für die Leistung ist die Pferdestärke, kurz PS. Die
Umrechnung ist
Wie viel PS hat ein Auto in dessen Fahrzeugausweis eine Leistung von 147 kW angegeben
ist?
3.6 Elektrische Arbeit / Energie
Die elektrische Arbeit ist das Produkt aus Spannung, Strom und der Zeit.
W = P ·t = U ·I ·t
14
HSR Hochschule für Technik Rapperswil
Das Formelzeichen der elektrischen Arbeit ist
, oder auch
die Masseinheit ist
bzw.
.
. Die Masseinheit der elektrischen Arbeit ist
. Die Abkürzung für
Energiekosten: Die elektrische Arbeit ist das was beim Strombezug schlussendlich abgerechnet
wird. Eine kWh elektrische Arbeit kostet ca. 20 Rappen.
3.7 Ohmsches Gesetz
Der Physiker Georg Simon Ohm hat den Zusammenhang zwischen Spannung, Strom und Widerstand festgestellt und nachgewiesen. Nach ihm wurde das Ohmsche Gesetz benannt. Mit
Hilfe des ohmschen Gesetzes lassen sich die drei Grundgrössen eines Stromkreises berechnen,
wenn mindestens zwei davon bekannt sind.
U =R·I
Legt man einen Widerstand R an eine Spannung U und bildet einen geschlossenen Stromkreis,
so fliesst durch den Widerstand ein bestimmter Strom I.
Die zwei Formeln URI und PUI zeigen die Beziehungen zwischen Spannung, Strom, Widerstand
und Leistung auf. Der Formelkreis zeigt die Formeln nach jeder Variable aufgelöst an.
3.7.1 Strom - Spannungs - Kennlinie
Miss die drei unbekannten Widerstände R1, R2 und R3 aus. Dazu müssen die Spannungswerte
nach folgender Tabelle eingestellt und der Strom gemessen werden.
U = 5V
U = 10 V
U = 15 V
U = 20 V
IR1
IR2
IR3
Tabelle 3.3: Gemessene Ströme durch die drei Widerstände R1, R2 und R3
Trägt man die Spannung und Ströme eines dazugehörigen Widerstandes in ein Diagramm ein
und verbindet die Punkte miteinander, dann bildet sich eine gerade Linie. Je steiler die Gerade,
desto kleiner ist der Widerstand.
15
HSR Hochschule für Technik Rapperswil
Abbildung 3.4: Spannungs-Strom-Kurve
3.8 Kirchhoffsche Regeln
3.8.1 Knotenregel
Die Knotenregel ist die erste Kirchhoffsche Regel. Bei der Parallelschaltung von Widerständen
oder anderen Bauteilen ergeben sich Verzweigungspunkte, sogenannte Knotenpunkte, des elektrischen Stroms. Betrachtet man die Ströme welche in und aus einem Knotenpunkt fliessen,
stellt man fest, dass die Summe der zufliessenden Ströme gleich der Summe der abfliessenden
Ströme ist.
Abbildung 3.5: Knotenregel
I1 + I2 + I4 = I3 + I5
Mit Hilfe der Knotenregel können Ströme in einem Knotenpunkt berechnet werden.
16
HSR Hochschule für Technik Rapperswil
3.8.2 Maschenregel
Die Maschenregel ist die zweite Kirchhoffsche Regel. In einem geschlossenen Stromkreis (Masche) stellt sich eine bestimmte Spannungsverteilung ein. Die Teilspannungen addieren sich in
ihrer Gesamtwirkung. Die Summe aller Quellenspannungen ist gleich der Summe aller Spannungabfälle.
Abbildung 3.6: Maschenregel
UQ1 + UQ2 = UR1 + UR2 + UR3
Mit Hilfe der Maschenregel kann eine unbekannte Quellenspannung oder ein unbekannter Spannungsabfall berechnet werden.
17
HSR Hochschule für Technik Rapperswil
Abbildung 3.7: Ohmscher Formelkreis
18
HSR Hochschule für Technik Rapperswil
3.9 Gefahren des elektrischen Stroms
Der menschliche Körper funktioniert elektrisch. Signale des Gehirns und der Sinnesorgane werden durch schwache elektrische Ströme mit Hilfe unserer Nerven weitergeleitet. Wirkt nun
von Aussen Strom auf unseren Körper ein, so wird das System gestört und der Körper wird
geschädigt.
• Der Strom unter
wird von den meisten Menschen nicht wahrgenommen.
• Ein Strom von
• Ab einem Strom von
wird als Kribbeln spürrbar.
können schmerzhafte Verkrampfungen auftreten.
• Durch das Verkrampfen der Handmuskulatur ab einem Strom von
schwer, den Strom führenden Gegenstand loszulassen.
• Wechselströme über
stand führen.
• Ströme über
fällt es
können zu Herzkammerflimmen und damit zum Herzstillkönnen zu starken Verbrennungen führen.
3.9.1 FI-Schalter
Der Fehlerstromschutzschalter dient als Personenschutz. Der FI-Schalter misst und vergleicht
die Ströme durch die Phase und den Nullleiter. Ist der hin- und zurückfliessende Strom nicht
gleich gross, wird der Stromkreis unterbrochen. Dieser Fall kann eintreten wenn Strom durch
eine Person vom Polleiter zur Erde fliesst. Hauptsächlich werden zwei Empfindlichkeitstypen
von FI-Schaltern installiert. Der empfindliche FI unterbricht den Stromkreis ab einem Differenzstrom von 10 mA, der Unempfindlichere ab 30 mA.
Abbildung 3.8: FI-Schutzschalter
19
HSR Hochschule für Technik Rapperswil
3.9.2 Sicherung
Sicherungen dienen zum Schutz von Leitungen und Geräte, vor Überlast und Kurzschluss.
Sicherungen dienen nicht als Personenschutz.
Die Sicherung besteht aus einem Glaskolben und einem Schmelzdraht darin. Bei Überbelastung
erwärmt sich der Schmelzdraht soweit bis er verbrennt.
Abbildung 3.9: Aufbau einer Sicherung
Geräteschutzsicherungen werden nach Stromstärke und ihrem Zeitverhalten unterschieden. Es
gibt Nennstromstärken zwischen 0.032 A und 10 A. Das zeitliche Verhalten der Sicherung wird
mit Buchstaben codiert.
Bezeichnung
Beschreibung
Superflink
Flink
Mittelträge
Träge
Superträge
Tabelle 3.4: Mögliche Codierungen von Sicherungen
Schaltzeichen
20
HSR Hochschule für Technik Rapperswil
4 Bauteile kennenlernen
4.1 Widerstand
Widerstände sind Bauteile mit einem gewünschten Widerstandsverhalten. Sie setzen der Elektronenströmung Widerstand entgegen. Man unterscheidet zwischen linearen und nichtlinearen
Widerständen. Lineare Widerstände werden auch als ohmsche Widerstände bezeichnet, weil das
Ohmsche Gesetz damit anwendbar ist. Widerstände haben einen Widerstandswert und eine Belastbarkeit. Die Belastbarkeit gibt an, welche elektrische Leistung der Widerstand dauernd in
Wärmeleistung umsetzen kann.
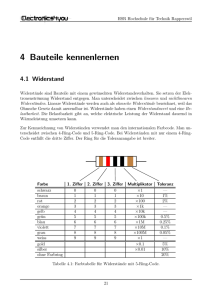
Zur Kennzeichnung von Widerständen verwendet man den internationalen Farbcode. Man unterscheidet zwischen 4-Ring-Code und 5-Ring-Code. Bei Widerständen mit nur einem 4-RingCode entfällt die dritte Ziffer. Der Ring für die Toleranzangabe ist breiter.
Farbe
schwarz
braun
rot
orange
gelb
grün
blau
violett
grau
weiss
gold
silber
ohne Farbring
1. Ziffer
0
1
2
3
4
5
6
7
8
9
2. Ziffer
0
1
2
3
4
5
6
7
8
9
3. Ziffer
0
1
2
3
4
5
6
7
8
9
Multiplikator
×1
×10
×100
×1k
×10k
×100k
×1M
×10M
×100M
×1
×0.1
×0.01
Toleranz
—
1%
2%
—
—
0.5%
0.25%
0.1%
0.05%
—
5%
10%
20%
Tabelle 4.1: Farbtabelle für Widerstände mit 5-Ring-Code.
21
HSR Hochschule für Technik Rapperswil
Widerstände werden nicht mit jedem beliebigen Widerstandswert hergestellt, sondern sind nach
bestimmten Normreihen abgestuft, sogenannte E-Reihen (z.B. E6, E12, E24, ...).
E6 (±20%)
1,0
1,5
2,2
3,3
4,7
6,8
E12 (±10%) 1,0
1,2
1,5
1,8
2,2
2,7
3,3
3,9
4,7
5,6
6,8
8,2
E24 (±5%) 1,0 1,1 1,2 1,3 1,5 1,6 1,8 2,0 2,2 2,4 2,7 3,0 3,3 3,6 3,9 4,3 4,7 5,1 5,6 6,2 6,8 7,5 8,2 9,1
Tabelle 4.2: IEC-Widerstands-Normreihen E6, E12 und E24
Folgende Bauformen werden für Widerstände üblicherweise eingesetzt:
Diskreter Schichtwiderstand
Chipwiderstand
MELF-Widerstand
4.1.1 Serie- und Parallelschaltung von Widerständen
R1
Rs
R3
R4
Rp
R2
RS =
RP =
4.2 Potentiometer
Ein Potentiometer ist ein einstellbarer Widerstand, dessen Widerstandswert durch Drehen einer
Achse verändert wird. Der gewünschte Widerstandswert wird mit Hilfe eines Schleifkontaktes
abgegriffen, der über eine Widerstandsbahn (z.B. Kohleschicht) bewegt wird. Der einstellbare
Widerstandswert geht von einem Kleinstwert (z.B. 0 Ω) bis zum Maximalwert (z.B. 10 kΩ).
22
HSR Hochschule für Technik Rapperswil
a)
b)
Abbildung 4.1: a) Schaltzeichen eines Potentiometers; b) Kohleschicht-Potentiometer
4.3 Kondensator
Kondensatoren sind Bauelemente, die elektrische Energie speichern können. Der einfachste Kondensator besteht aus zwei gegenüberliegenden Metallplatten und einem Dielektrikum (Isolator).
Legt man am Kondensator eine Spannung an, so entsteht zwischen den Platten ein elektrisches
Feld und der Kondensator “lädt” sich auf. Die Kapazität eines Kondensator besitzt das Formelzeichen
und die Masseinheit ist
(Farad). Kapazität ist die Eigenschaft, unter dem
Einfluss einer Spannung elektrische Ladungen speichern zu können. Die elektrische Ladung hat
das Formelzeichen Q und die Einheit Amperesekunden (As).
Kondensatorplatten
Formelzeichen: C
Dielektrikum (z.B. Luft, Keramik)
4.3.1 Serie- und Parallelschaltung von Kondensatoren
C1
Cs
C3
C4
C2
CS =
CP =
23
Cp
HSR Hochschule für Technik Rapperswil
Ladevorgang
R
Entladevorgang
Ic
C
U
Ic
Uc
Uc
UC
C
R
UC
t
t
IC
IC
t
t
Abbildung 4.2: Lade- und Entladevorgang eines Kondensators
Aluminium-Elko
Tantal-Elko
Keramik
Folien
Abbildung 4.3: Verschiedene Kondensatortypen
4.4 Diode
Eine Diode lässt den elektrischen Strom in einer Richtung durch und sperrt ihn in der angepolt, so hat die
deren Richtung. Wird die Diode in
Diode einen sehr niedrigen Widerstandswert und ein Strom kann fliessen. Ist die Diode in
gepolt, so hat sie einen sehr grossen Widerstandswert und sperrt
den Strom. Das Schaltzeichen einer Diode sieht wie folgt aus:
Anode
Kathode
Die zwei Diodenanschlüsse heissen Anode und Kathode. Die in Leitungsrichtung zeigende Spitze
gibt die Stromrichtung im Durchlasszustand an. Nun wollen wir die Abhängigkeit zwischen
24
HSR Hochschule für Technik Rapperswil
Strom und Spannung einer Diode mittels Messreihen genauer untersuchen. Der Messaufbau
sieht wie folgt aus:
A
100R
+
Netzgerät
0...10V
V
-
Aufgabe: Baue den Messaufbau auf und vervollständige die untenstehende Tabelle mit den gemessenen Werte. Tip: Eine negative Spannung an der Diode kann einfach erzeugt werden,
indem man die zwei Kabel (+/-) am Netzgerät vertauscht.
Diodenspannung
0V
0.3 V
0.4 V
0.5 V
Diodenstrom
1 mA
Diodenspannung
-0.2 V
-0.6 V
-1.0 V
-1.4 V
5 mA
-1.6 V
10 mA
20 mA
50 mA
-2.0 V
Diodenstrom
Aufgabe: Trage nun die Werte im untenstehenden Diagramm ein und verbinde sie miteinander.
ID
mA
50
40
30
20
10
−2.0
−1.8
−1.6
−1.4
−1.2
−1.0
−0.8
−0.6
−0.4
0.2
−0.2
−10
25
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
UD
V
HSR Hochschule für Technik Rapperswil
5 Projekt Soundbox
Die Soundbox spielt die Musik von einem MP3-Player oder einem anderen Audiogerät ab. Über
die Audiobuchse kann eine Audioquelle mit der Soundbox verbunden werden. Die Stromversorgung ist über die Netzspannung realisert. Die Elektronik der Soundbox ist bewusst mit Standardbauteilen konstruiert. Sowohl die Spannungsregelung als auch der Audioverstärker sind mit
diskreten Transistoren realisiert. Neben der Bestückung der Leiterplatte muss das Gehäuse bearbeitet werden, das heisst Löcher für den Lautsprecher, den Schalter und die Buchsen müssen
gebohrt werden. Am Schluss wird die Box verdrahtet, dabei werden die Techniken Crimpen,
Schraubklemmen sowie Löten und Isolieren mit Schrumpfschlauch angewendet.
Die Schaltung der Soundbox besteht hauptsächlich aus zwei Teilbereichen, die in der Elektronik
sehr häufig vorkommen. Der erste Bereich beinhaltet den Speisungsteil. Dieser Teil der Schaltung sorgt dafür, dass eine stabile und rauschfreie Speisespannung für die weitere Schaltung zur
Verfügung steht. Der zweite Bereich beinhaltet den eigentlichen Audioverstärker. Dieser Schaltungsteil verstärkt das eingespeiste Audiosignal und gibt es durch den Lautsprecher wieder.
5.1 Funktion des Speisungsteils
Die Soundbox wird über das Netzkabel gespeist und bezieht somit die nötige elektrische Energie
aus der Steckdose. Jedoch liefert das Netz eine Wechselspannung von 230 V. Bevor die Soundbox
damit betrieben werden kann, müssen noch einige wichtige Massnahmen getroffen werden,
denn das direkte Betreiben einer Schaltung mit Netzspannung hat grosse Nachteile und ist in
einigen Fällen sogar verboten. Die Netzspannung muss im Gerät zuerst galvanisch getrennt
und in eine niedrigere Spannung (z.B. 12 Volt) transformiert werden, damit ein Personenschutz
gewährleistet ist. Sowohl die galvanische Trennung wie auch die Transformierung wird mittels
eines Transformators erreicht.
5.1.1 Der Transformator
Das Prinzip des Transformators beruht auf elektromagnetischer Induktion. Ein Transformator
besteht grundsätzlich aus zwei Drahtwicklungen, die isoliert auf einem gemeinsamen Eisenkern
gewickelt sind. Die beiden Wicklungen werden Primär- und Sekundärwicklung genannt. Durch
den gemeinsamen Eisenkern sind die beiden Wicklungen miteinander magnetisch gekoppelt.
Somit kann elektrische Energie von der Primärwicklung auf die Sekundärwicklung übertragen
werden, ohne dass die beiden Wicklungen elektrisch verbunden sein müssen.
26
HSR Hochschule für Technik Rapperswil
Der Transformator ist in der Lage eine Primär-Wechselspannung sowohl in eine höhere wie auch
in eine niedrigere Sekundär-Wechselspannung zu transformieren. Die Spannungsübersetzung (ü)
ist grundsätzlich proportional zum Verhältnis der beiden Windungszahlen Nprim und Nsek .
ü =
=
=
(5.1)
In der Soundbox-Schaltung wird die Netzspannung auf eine Sekundärspannung von 12 V∼
transformiert. Da aber der Audioverstärker nicht mit einer Wechselspannung betrieben werden
kann, muss diese zuerst in eine Gleichspannung gewandelt werden. Diese Aufgabe übernimmt
das Speisungsteil der Soundbox-Schaltung.
Um die gewünschte Gleichspannung zu erreichen, muss die Wechselspannung zuerst gleichgerichtet werden und anschliessend geglättet und stabilisiert werden.
230V~
Primärwicklung
Sekundärwicklung
12V~
Abbildung 5.1: Schaltzeichen eines Transformators
5.1.2 Der Gleichrichter
Eine typische Gleichrichterschaltung ist der Brückengleichrichter. Dieser besteht aus vier Siliziumdioden, wie in Abbildung 5.2 dargestellt. Der Brückengleichrichter funktioniert wie folgt: die
positive Halbwelle der Wechselspannung wird unverändert durchgelassen; die negative Halbwelle
hingegen, wird vom Gleichrichter “hinaufgeklappt”. Somit resultiert am Ausgang des Gleichrichters eine rein positive Spannung, die in Abbildung 5.3b als gestrichelte Linie gezeichnet
ist. Um diese pulsierende Spannung zu glätten kann ein Kondensator parallel zum Ausgang
geschaltet werden. Dadurch werden die tiefen Spannungseinbrüche kompensiert und die Spannung sieht nun eher nach einer Gleichspannung aus, wie dies in Abbildung 5.3b die durchzogene
Linie zeigt.
U1
U2
Abbildung 5.2: Brückengleichrichter mit Glättungskondensator
27
HSR Hochschule für Technik Rapperswil
u1 (t)
a)
t
u2 (t)
b)
t
Abbildung 5.3: Spannungsverlauf: a) reine Wechselspannung, b) nach dem Gleichrichter
Bei einer reinen Wechselspannung (z.B. die Netzspannung) unterscheidet man zwischen verschiedenen Grössen:
Effektivwert Ueff : Der Effektivwert einer Wechselspannung entspricht der Grösse, die eine
Gleichspannung haben müsste, um die gleiche Leistung (z.B. an einer Glühlampe) zu
erzielen. Bei der Netzspannung aus der Steckdose gilt Ueff = 230 V.
Spitzenwert Û : Der Spitzenwert einer Wechselspannung entspricht dem höchsten
Wert der
√
Sinusschwingung. Diese √
errechnet sich bei einem reinen Sinus zu Û = 2 · Ueff . Bei der
Netzspannung gilt Û = 2 · 230 V ≈ 325 Vs .
Nach dem Gleichrichten und Glätten der Wechselspannung U1 = 12 Veff resultiert nun eine
Gleichspannung U2 mit einer Amplitude von ca. 17 Volt. Diese höhere Spannung lässt sich damit erklären, dass der Glättungskondensator immer auf den Spitzenwert der Wechselspannung
aufgeladen wird.
√
Spitzenwert Û = 2 · Ueff ≈ 17 Vs
Effektivwert Ueff = 12 V
u1 (t)
t
Abbildung 5.4: Spitzen- und Effektivwert der transformierten Wechselspannung
28
HSR Hochschule für Technik Rapperswil
5.1.3 Die Spannungsstabilisierung
Die Spannung nach dem Gleichrichter wird nun mittels dem nachgeschalteten Spannungsregler
auf einen konstanten Wert stabilisiert. Die Spannungsregler-Schaltung gleicht die restlichen
Schwankungen aus. Am Ausgang des Reglers resultiert dann eine Gleichspannung von exakt
12 V, die frei von jeglichen Schwankungen und Spannungseinbrüchen ist, die sich negativ auf
den nachfolgenden Verstärker auswirken könnten.
Abbildung 5.5: Schema des Speisungsteils
5.2 Audioverstärker
Die stabilisierte Spannung versorgt den Audioverstärker mit Energie. Der Audioverstärker besteht aus drei Teilen: die Lautstärkeregelung, der Vorverstärker und der Leistungsverstärker.
Abbildung 5.6: Schema des Verstärkerteils
5.2.1 Lautstärkeregelung
Unser Verstärker arbeitet als Monoverstärker, das heisst, er hat keine Stereofunktion. Am Eingang des Verstärkers werden zwei Signale eingespiesen: der linke und der rechte Musikkanal
29
HSR Hochschule für Technik Rapperswil
einer Stereo-Audioquelle. Diese beiden Signale werden addiert, damit kann die Leistung vom
Eingangssignal erhöht werden. Mit einem Potentiometer, einem einstellbaren Widerstand, kann
die Lautstärke eingestellt werden.
5.2.2 Vorverstärker
Das Audiosignal wird nun über den Kondensator C3 in den Vorverstärker eingekoppelt. Der
Kondensator lässt die Wechselspannung durch, blockiert aber die Gleichspannung. Im Vorverstärker wird hauptsächlich die Spannung verstärkt. Über die beiden Transistoren T7 und
T8 wird der Spannungspegel in die richtige Höhe gebracht, um das Signal anschliessend dem
Leistungsverstärker zu übergeben.
5.2.3 Leistungsverstärker
Der Leistungsverstärker besteht aus zwei komplementären Leistungstransistoren T9 und T10.
Wie das Wort Leistungsverstärker schon aussagt, wird hier die Leistung generiert, welche dem
Lautsprecher übergeben wird und dann als Lautstärke wahrgenommen wird. Zwischen dem Leistungsversstärker und dem Lautsprecher ist der Kondensator C7 geschaltet, er dient wiederum
als DC1 -Blocker. Der Leistungsverstärker und der Vorverstärker arbeiten eng zusammen. Der
Widerstand R17 wirkt als Rückkopplung und schliesst somit den Regelkreis des Verstärkers.
5.3 Mechanische Fertigung
5.3.1 Crimpverbindung
Eine Crimpverbindung ist eine lötfreie elektrische Verbindung. Sie wird durch Kaltverformen
(Verpressen) der Crimphülse mit dem elektrischen Leiter hergestellt. Beim Anfertigen einer
Crimpverbindung müssen Leiterquerschnitt, Crimphülse und Presswerkzeug aufeinander abgestimmt sein.
Arbeitsfolge für das Pressen von Crimpverbindungen:
1. Leiter abisolieren und verdrillen.
2. Hülse in Werkzeug stecken und leicht andrücken, damit dieses nicht hinaus rutscht.
3. Litze in Hülse einführen und verpressen.
4. Werkzeug bis zum Anschlag fest zusammendrücken.
1
englisch: direct current, deutsch: Gleichspannung/-strom
30
HSR Hochschule für Technik Rapperswil
Folgende Punkte machen eine gute Crimpverbindung aus:
1. Das Litzenende muss sichtbar sein.
2. Die Leiterisolation muss bei der Isolationshalterung unterklemmt sein.
3. Die Verbindung muss einem Zugversuch standhalten.
5.3.2 Schraubverbindung
Die Verbindungsstelle zwischen dem Netzkabel und dem Netzstecker oder der Soundbox-Leiterplatte
ist als Schraubverbindung realisiert. Litzen dürfen bei Schraubverbindungen weder direkt unterklemmt noch verzinnt werden. Es sind Aderendhülsen zu verwenden.
Arbeitsfolge für das Aufpressen von Aderendhülsen:
1. abisolieren
2. verdrillen
3. passende Hülse aufstecken
4. Hülse crimpen und bei Bedarf auf bestimmte Länge schneiden
5.3.3 Schrumpfschlauch
Der Schrumpfschlauch ist ein Kunststoffschlauch, der sich bei Erwärmung durch Heissluft
stark zusammenzieht. Diese werden hauptsächlich zur elektrischen Isolation von Leitern oder
Lötverbindungen eingesetzt. Schrumpfschläuche werden in verschiedenen Farben und mit Durchmessern von 1mm bis über 1m produziert. Das Schrumpfverhältnis vom ungeschrumpften zum
geschrumpften Durchmesser beträgt bei den üblichen Schläuchen 2:1.
Arbeitsfolge:
1. Passender Schlauchdurchmesser wählen. Die besten Ergebnisse erzielt man, wenn der
Schrumpfschlauch gerade noch über das zu umhüllende Objekt passt.
2. Schrumpfschlauch auf das gewünschte Mass abschneiden und auf saubere Schnittkanten
achten.
3. Schrumpfschlauch um das zu schrumpfende Objekt schieben und mit einem Heissluftfön
bei einer Temperatur von ca. 250-300°C schrumpfen.
31
HSR Hochschule für Technik Rapperswil
5.3.4 Montageunterlagen
Abbildung 5.7: Anschlussbelegung des Netzsteckers
32
HSR Hochschule für Technik Rapperswil
Name
Bezeichnung
Wert/Typ
Lieferant, Art.Nr.
TR1
LED1
X1
F1
D1-D4
D5-D7
D8
R1
R2
R3
R4,R19
R5,R10,R12,R13,R17
R6,R14,R18
R7
R8,R9,R15
R11
R16
C1
C2,C7
C3,C4,C5,C6
T1,T2,T8
T3
T4,T5,T6,T7
T9
T10
Printtransformator
LED
Printklemme
Sicherungshalter
Gleichrichterdiode
Siliziumdiode
Schottkydiode
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Widerstand
Elektrolyt-Kondensator
Elektrolyt-Kondensator
Elektrolyt-Kondensator
PNP-Transistor
NPN-Transistor
NPN-Transistor
NPN-Transistor
PNP-Transistor
Sicherungen 5×20 mm
Breitbandlautsprecher
Wippschalter
Netzkabel
Netzstecker Schweiz
Potentiometer
Mutterabdeckung für Poti
Knopf für Poti
Deckel für Poti
Kühlkörper für TO220
Senkschrauben Torx
Unterlagsscheiben
Sicherungsmuttern
Audiokabel
Klinkenbuchse
Kunststoffgehäuse
Flachsteckhülsen
Flachsteckhülsen
Kabelbinder T18R
Durchführungstülle
Flachsteckhülsen vollisoliert
Aderendhülse
12 V, 10 VA
grün, 5mm
MKDSN1.5/4
Distrelec, 352495
Distrelec, 251536
Distrelec, 141211
Distrelec, 270184
Distrelec, 603560
Distrelec, 603016
Distrelec, 601424
Distrelec, 714141
Distrelec, 714072
Distrelec, 714057
Distrelec, 714000
Distrelec, 714132
Distrelec, 714089
Distrelec, 714113
Distrelec, 714077
Distrelec, 714148
Distrelec, 714094
Distrelec, 801192
Distrelec, 801187
Distrelec, 800628
Distrelec, 611579
Distrelec, 611212
Distrelec, 610359
Distrelec, 610084
Distrelec, 610085
Distrelec, 280089
Distrelec, 153906
Distrelec, 202184
Distrelec, 510125
Distrelec, 958028
Distrelec, 748353
Distrelec, 261708
Distrelec, 261522
Distrelec, 261582
Distrelec, 650142
Distrelec, 343242
Distrelec, 343017
Distrelec, 343053
Distrelec, 672265
Conrad, 738619-62
Distrelec, 301689
Distrelec, 504265
Distrelec, 504261
Distrelec, 503782
Distrelec, 500572
Distrelec, 504290
Distrelec, 504241
1N4001
1N4148
BAT83S
51k
200R
100R
1R
22k
1k
8k2
330R
100k
1k5
1000 µF/35V
2200 µF/16V
47 µF/25V
BC557B
BD243C
BC547C
BD139
BD140
0.25 A T
15 W, 4 Ω
ON-OFF
0.75 mm2 , grau
10 A, schwarz
10 kOhm
15 mm, schwarz
15 mm, schwarz
15 mm, schwarz
27.3 K/W
M4×12 mm
M4×0.8 mm
M4
1.8 m
3.5 mm
180×130×60 mm
4.8×0.8 mm
2.8×0.8 mm
102 mm
4.8×0.8 mm
0.75 mm2 ×6 mm
Tabelle 5.1: Stückliste der Soundbox
33
HSR Hochschule für Technik Rapperswil
Abbildung 5.8: Bohrvorlage für den Gehäusedeckel
34
HSR Hochschule für Technik Rapperswil
Abbildung 5.9: Bestückungsplan der Soundbox
35
HSR Hochschule für Technik Rapperswil
6 GPS-Gerät mit u-blox Modul
6.1 Was ist GPS?
Das Global Positioning System oder kurz GPS ist heute das wichtigste Ortungs- und Navigationssystem. Das GPS, auch NAVSTAR-GPS (Navigational Satellite Timing and Ranging Global Positioning System) genannt, wird vom amerikanischen Verteidigungsministerium betreut. Mit Hilfe des GPS ist es möglich sowohl die eigene Position, wie auch die Geschwindigkeit
und die aktuelle Zeit überall auf der Welt sehr genau zu bestimmen.
Das GPS-Projekt wurde im Jahre 1973 von den USA gegründet. Bereits im Jahr 1978 wurde
der erste GPS-Satellit in den Weltraum entsandt. Aber erst am 17. Juli 1995 wurde das GPS
mit 24 Satelliten offiziell in Betrieb genommen.
6.1.1 Grundfunktion
Das NAVSTAR-System besteht aus drei Komponenten:
36
HSR Hochschule für Technik Rapperswil
Das System benötigt mind. 24 Satelliten, die auf sechs unterschiedliche Bahnen um die Erde
kreisen. Heute sind sogar 31 Satelliten aktiv. Die Satelliten fliegen auf einer Höhe von 20’183 km
mit einer Geschwindigkeit von ca. 3.7 km pro Sekunde. Abbildung 6.1 zeigt ein GPS-Satellit
neuester Generation. Jeder Satellit sendet ein Funksignal mit einer Frequenz von 1575.42 MHz
aus. Die Satelliten besitzen Rubidium und Cäsium Atomuhren, die eine hohe Uhrenstabilität
garantieren. Die extreme Ganggenauigkeit von ±1 Sekunde in 1 Million Jahren ist absolut
notwendig für das Funktionieren des Systems.
Abbildung 6.1: Navstar-2RM GPS-Satellit
6.2 Wie wird die Position bestimmt?
Um die Position des Empfängers bestimmen zu können, muss einerseits die Position der jeweiligen Satelliten bekannt sein und andererseits muss die Distanz zwischen dem Empfänger und
den Satelliten gemessen werden. Um die Distanz zu einem Satellit messen zu können, werden
zwei Arten an Informationen benötigt: die Geschwindigkeit mit der sich das Signal ausbreitet
und die benötigte Reisezeit des Signals vom Satellit bis zum Empfänger. Daraus folgt:
Distanz = Geschwindigkeit × Zeit
Beispiel:
Reisezeit des Signals
Lichtgeschwindigkeit
Distanz
≈ 67 Millisekunden
≈ 300’000 km/s
≈ 0.067 s · 300’000 km/s = 20’100 km
⇒ Dies ist nun die ungefähre Distanz zu den GPS Satelliten.
37
HSR Hochschule für Technik Rapperswil
6.2.1 Zweidimensionale Positionierung
Wenn man die Distanz zu zwei Satelliten kennt, kann die Position in der Ebene berechnet
werden. Die Position des Empfängers liegt genau im Schnittpunkt der 2 Kugeln. Dabei ergeben
sich theoretisch zwei Schnittpunkte, wobei eine davon ausgeschlossen werden kann weil sie
unrealistisch sein kann (geographisch unmöglich).
6.2.2 Dreidimensionale Positionierung
Mit drei Satelliten kann die Position im Raum berechnet werden. Hier ist die Position des
Empfängers genau im Schnittpunkt der drei Kugeln.
6.2.3 Wieviele Satelliten sind notwendig für eine Position?
Für die Lauftzeitmessung der Signale muss man die Zeit sehr genau kennen und die üblichen
Empfänger besitzen leider keine genaue Uhr. Dieses Problem kann man aber umgehen, falls
man einen weiteren Satellit zur Verfügung hat. Daher kann die Position und die Zeit mit den
Signalen von drei Satelliten ermittelt werden, wobei dann die Höhe geschätzt wird (2-D). Hat
man auch das Signal eines vierten Satelliten, kann sowohl die genaue Zeit, die Position als auch
die Höhe des Empfängers bestimmt werden (3-D).
38
HSR Hochschule für Technik Rapperswil
6.3 GPS Empfänger
x
xx
xx
x
xx
xx
x
x
x
xx
x
x
x
x
x
x
xx
x
x
xx
xx
x
x
xx
xx
x
x
xx
xx
x
x
x
x
x
xx
xx
x
xx
xx
xx
xx
x
6.3.1 Schemas und Bestückungspläne
Abbildung 6.2: Bestückungsplan des GPS-Empfängers
Position
Beschreibung
Wert
R1, R2
R3
R4
C1, C2
C3, C4
T1
D1
U1
U2
U3
J1
Chip-Widerstände, 1206
Chip-Widerstände, 1206
Chip-Widerstände, 1206
Kondensator, 1206
Kondensator, 1206
NPN-Bipolartransistor
LED, SMD PLCC-2
u-blox GPS-Modul
ESD Schutzdioden, SOT23-6
Spannungsregler 3.3 V, 250 mA
Mini USB B-Typ
Gehäuse blau 100x50x25 mm
Leiterplatte
USB-Kabel, USB B-Typ
Nylon Abstandhülse
Zylinderschrauben Polyamid
Sechskantmuttern Polyamid
27R
270R
22k
1 uF
100 nF
BC847
grün
LEA-5
USBLC6-2
MCP1701A
1.8 m, grau
L=10 mm
M3x20 mm
M3
Distributor Art. Nr.
Distrelec
Distrelec
Distrelec
Farnell
Distrelec
Farnell
Farnell
u-blox AG
Farnell
Farnell
Farnell
Farnell
PCB-Pool
Distrelec
Farnell
Distrelec
Distrelec
Tabelle 6.1: Stückliste des GPS-Empfängers
39
711273
711285
711308
9227865
830684
1081230
4134448
1269406
1605555
1243250
3818743
679464
666890
343430
348201
HSR Hochschule für Technik Rapperswil
Abbildung 6.3: Schema des GPS-Empfängers
40
HSR Hochschule für Technik Rapperswil
Abbildung 6.4: Bestückungsplan der Zusatzschaltung
Position
Beschreibung
C1
Keramikkondensator
C2
Tantalkondensator
LED1
LED
R1, R2, R4, R5 Chipwiderstand
R3
Chipwiderstand
U1
Mikrocontroller
X1
microSD-Card Sockel
Wert
Distributor
Art. Nr.
100nF
10uF
grün
100k
1k
MSP430F2272IDA
Farnell
Farnell
Distrelec
Distrelec
Distrelec
Farnell
Farnell
1650887
1457412
254566
711316
711292
1537188
1558178
Tabelle 6.2: Stückliste der Zusatzschaltung
41
HSR Hochschule für Technik Rapperswil
Abbildung 6.5: Schema der Zusatzschaltung
42
HSR Hochschule für Technik Rapperswil
6.3.2 Installation der Software u-center
Von der Firma u-blox AG existiert die PC-Software u-center, mit der die Daten des gebauten
GPS-Empfängers angeschaut und ausgewertet werden können. Die aktuellste Version dieser
Software kann von der folgenden Website kostenlos heruntergeladen werden:
http://www.u-blox.com/de/evaluation-tools-a-software/u-center/u-center.html
Das Installationsprogramm beinhaltet auch den USB-Treiber für den PC. Auch eine ausführliche
Benutzeranleitung ist unter dem gleichen Link zu finden.
6.3.3 Aufzeichnen der Positionsdaten mit dem u-center
Die Daten des GPS-Empfängers können im u-center in Echtzeit angeschaut werden. Unter
Anderem können folgende Informationen angezeigt werden:
•
•
•
•
•
•
aktuelle Position (Längen- und Breitengrad, Höhe über Meer)
Fahrgeschwindigkeit
genaue Zeit (Weltzeit, UTC)
Satellitenpositionen
Stärke der empfangenen Satellitensignale
...
Um den Empfänger mit dem u-center zu verbinden, geht man am besten folgendermassen vor:
1. Den GPS-Empfänger über das USB-Kabel mit dem PC verbinden.
2. Das u-center starten.
3. Im Menü unter Receiver→Port→COMx die entsprechende Schnittstelle wählen.
Nun sollte in der unteren Leiste ein grünes Steckersymbol
blinken und damit den korrekten Empfang der Daten signalisieren.
im Sekundentakt
Die Daten des GPS-Empfängers werden nun im u-center angezeigt und können nach Wunsch
auch aufgezeichnet werden. Um die Aufzeichnung zu starten, klickt man Player→Record.
Danach öffnet sich ein Dialog, wo man einen Dateinamen für die Aufzeichnung eingeben kann.
Die Aufzeichnung wird im Menü mit Player→Stop gestoppt.
6.3.4 Anzeigen des zurückgelegten Weges in Google Map/Earth
Die aufgezeichneten Daten können direkt aus dem u-center ins Google Map oder Google Earth
Format exportiert werden. Die Daten werden wie folgt exportiert:
1. Zuerst muss sichergestellt werden, dass das u-center eine genügend grosse Anzahl an
Positionen zwischenspeichern kann. Das heisst, im Menü auf Tools→Preferences klicken
und unter Database→“Maximum number of epochs” die Zahl entprechend einstellen, z.B.
10 Mio. sollten genügen.
43
HSR Hochschule für Technik Rapperswil
2. Die Daten aus einer Datei vollständig abspielen, d.h. im Menü auf File→Open und dann
auf Player→Scan klicken.
3. Nun können die Positionen mit File→Database Export→Google Map oder Earth exportiert werden.
Eine gute Alternative zum Exportieren der NMEA Rohdaten in das Google Earth Format ist
GPS-Babel. Diesen findet man unter www.gpsbabel.org.
6.3.5 AssistNow Offline Satellitendaten aktualisieren
Der GPS-Empfänger von u-blox verfügt über die sogenannte AssistNow Offline Funktionalität.
Diese ermöglicht Informationen über die Satellitenbahnen im Empfänger abzuspeichern, womit
die Satellitenpositionen auch über Tage hinweg noch sehr genau geschätzt werden können.
Der Vorteil dieser Funktion ist, dass der Empfänger nicht mehr lange warten muss, bis er
die entsprechenden Satellitendaten empfangen hat, sondern verfügt von Anfang an über alle
nötigen Satellitendaten. Einerseits verkürzt sich die Zeit bis zur ersten Positionsbestimmung
und andererseits resultiert dadurch eine höhere Positionsgenauigkeit.
Hier sind die nötigen Schritte aufgelistet, um die Offline-Daten im GPS-Empfänger zu aktualisieren:
1.
2.
3.
4.
5.
Den GPS-Empfänger über das USB-Kabel mit dem PC verbinden.
Das u-center auf dem PC starten.
Im Menü unter Receiver→Port→COMx die entsprechende Schnittstelle wählen.
Im Menü Tools→AssistNow Offline wählen.
Ein Dialog öffnet sich. Nun muss Flash update und die gewünschte Zeitperiode gewählt
werden.
6.3.6 Firmware Update des GPS-Moduls
Die Firmware des GPS-Empfängers kann mit dem u-center aktualisiert werden. Eine neue
Firmware bringt neue Funktionen und Verbesserungen für das GPS-Modul. Die Firmware findet
man auf der u-blox Website:
www.u-blox.com/en/firmware/gps-modules-firmware/u-blox-5-firmware.html.
Zu beachten ist, dass der vorliegende GPS-Empfänger die Firmware für das LEA-5H Modul
benötigt. Die neue Firmware wird nun wie folgt installiert:
1. Den GPS-Empfänger über das USB-Kabel mit dem PC verbinden.
2. Das u-center auf dem PC starten.
3. Im Menü unter Receiver→Port→COMx die entsprechende Schnittstelle wählen. Meistens
entspricht die letzte aufgeführte Zahl dem eigenen Empfänger.
4. Die heruntergeladene ZIP-Datei in einem beliebigen Ordner entpacken.
5. Im Menü bei Tools→Firmware Update u-blox 5/6 klicken.
44
HSR Hochschule für Technik Rapperswil
6. Unter Firmware image die entzippte Datei angeben und USB alternative update method
wählen, dann auf OK klicken.
6.3.7 Aufzeichnen der Positionsdaten mit der Zusatzschaltung
Falls man am GPS-Empfänger die Zusatzschaltung angeschlossen hat, können die Positionsdaten (NMEA-Format) auch ohne PC aufgezeichnet werden. Sobald der GPS-Empfänger gespeist
wird (z.B. über einem Akku-Pack), beginnt die Zusatzschaltung die Daten auf die eingesteckte
microSD-Card zu speichern.
45
HSR Hochschule für Technik Rapperswil
7 Relaisschaltungen
Geschichte: Der erste funktionsfähige Digitalrechner wurde von Konrad Zuse im Jahr 1941
gebaut und hiess Z3. Der Z3 gilt als erster Computer, der auf dem binären Zahlensystem
basierte und sich programmieren liess. Dieser Rechner konnte Gleitkommazahlen addieren, subtrahieren, multiplizieren, dividieren und die Quadratwurzel ziehen. Zudem besass
dieser einen Speicherplatz für 64 Gleitkommazahlen. Das Erstaunliche an diesem Rechner ist, dass er ausschliesslich aus Relais bestand. Sowohl die Recheneinheit wie auch der
Speicher wurde mit Relais realisiert.
Relais gehören zu den elektromechanischen Bauelemente. Der grobe Aufbau eines Relais ist in
Abbildung 7.1 ersichtlich. Ein Relais besteht hauptsächlich aus einer Spule, einem Anker und
aus einem oder mehreren Kontakten. Beim Anschliessen einer Steuerspannung fliesst ein Strom
durch die Spule, die im Eisenkern ein magnetisches Feld erzeugt und so den Anker magnetisch
anzieht. Der Anker wiederum drückt auf die Kontakte und schaltet diese so um. Sobald der
Spulenstrom unterbrochen wird, fällt der Anker wieder zurück in die Ausgangsposition.
Anker
Gehäuse
Spule
Arbeitskontakte
(offen)
Anschluss für
Steuerspannung
Arbeitskontakte
(geschlossen)
Anschluss für
Laststromkreis
Abbildung 7.1: Aufbau und Funktion eines Relais
Das Schemasymbol eines Relais ist unten in Abbildung 7.2 dargestellt. Das Rechteck links im
Bild symbolisiert die Spule mit den zwei Anschlüssen für die Steuerspannung. Links sind drei
Schaltkontakte dargestellt: 1 Wechsler, 1 Öffner (auch Ruhekontakt genannt) und 1 Schliesser
(auch Arbeitskontakt genannt). Die gestrichelte Linie symbolisiert die mechanische Betätigung
der Schaltkontakte durch den Anker.
46
HSR Hochschule für Technik Rapperswil
K
Abbildung 7.2: Schemasymbol eines Relais
7.1 Aufgabe 1
Die wichtigste Funktion, die in einer Relaisschaltung vorkommt, ist die Selbsthaltung. Dabei
geht es darum, dass sobald das Relais eingeschaltet wird, dieses sich selbst eingeschaltet halten
kann. Vervollständige das unten stehende Schema so, dass das Relais mit dem Taster A eingeschaltet werden kann und dass es auch beim Loslassen des Tasters A weiterhin eingeschaltet
bleibt. Dabei soll die Lampe H1 immer den Zustand (ein/aus) des Relais K1 anzeigen.
Material:
• 1 Taster mit Arbeitskontakt (Schliesser)
• 1 Relais mit 2 Wechsler
+12V
H1
A
K1
0V
Abbildung 7.3: Relais mit Selbsthaltung
47
HSR Hochschule für Technik Rapperswil
7.2 Aufgabe 2
Nun gilt es eine anspruchsvollere Aufgabe mit zwei Relais zu lösen. Beim Einschalten der
Speisespannung darf keines der beiden Relais anziehen. Wird nun Taste A gedrückt, muss
Relais K1 anziehen. Wird Taste A wieder losgelassen, muss nun auch Relais K2 anziehen. Mit
Taste B muss die ganze Schaltung rückgestellt werden können. Die Lampen H1 und H2 sollen
jeweils immer den Zustand (ein/aus) von K1 bzw. K2 anzeigen.
Ergänze die untenstehende Schaltung so, dass die oben genannte Aufgabe erfüllt wird!
Material:
• 1 Taster mit Arbeitskontakt (Schliesser) und Ruhekontakt (Öffner)
• 2 Relais mit je 2 Wechsler
+12V
A
H1
K1
H2
K2
B
0V
Abbildung 7.4: Schaltung mit zwei Relais
48
HSR Hochschule für Technik Rapperswil
8 Elektrosmog, GSM Detektor
8.1 Elektromagnetische Felder und Strahlen
Elektrosmog ist ein Begriff der zusammengesetzt ist aus den Wörtern Elektro- und Smog. Smog
ist wiederum ein zusammengesetztes englisches Wort aus smoke (Rauch) und fog (Nebel). Also bedeutet Elektrosmog in etwa elektrisch verursachter Rauchnebel. Mit Elektrosmog sind
eigentlich elektrische, magnetische und elektromagnetische Felder und Strahlen über alle Frequenzbereiche gemeint. Das Wort wird vor allem dort verwendet wo gezielt ein negativer Aspekt
auf die elektromagnetischen Felder geworfen wird.
Das folgende Bild gibt einen Überblick über das Frequenzspektrum elektromagnetischer Felder.
Die Felder reichen von den Radiowellen hin bis zur Kosmischen Strahlung.
Abbildung 8.1: Elektromagnetisches Spektrum
49
HSR Hochschule für Technik Rapperswil
8.1.1 Tiefe Frequenzen
Bei tiefen Frequenzen bis 1 kHz werden die elektrischen und die magnetischen Felder separat
betrachtet. Das bekannteste magnetische Gleichfeld ist das natürliche Erdmagnetfeld. Beim
Südpol treten die Feldlinien aus und treffen im Nordpol wieder in die Erde ein. Mit Hilfe des
Erdmagnetfeldes funktioniert der Kompass.
Abbildung 8.2: Erdmagnetfeld
Grundsätzlich kann man sagen, dass elektrische Felder durch eine elektrische Spannung entstehen. Magnetische Felder werden durch einen Stromfluss verursacht. Durch den Menschen
verursachte Felder treten auf bei
•
•
Elektrische Felder können sehr einfach abgeschirmt werden, bereits das Hausdach schützt die
Bewohner vor elektrischen Feldern. Magnetische Felder sind sehr aufwendig abzuschirmen. Eine Möglichkeit zur Abschirmung bietet der Faradaysche Käfig. Bis heute konnte ausser der
thermischen Wirkung kein gesundheitlicher Einfluss der Felder auf die Menschen nachgewiesen
werden. Thermische Wirkungen treten bei sehr hohen elektrischen oder magnetischen Feldern
auf, z.B. bei einem Blitzeinschlag.
50
HSR Hochschule für Technik Rapperswil
8.1.2 Mittlere Frequenzen
Bei Frequenzen von 10 kHz bis 100 GHz treten die elektrischen und die magnetischen Felder
nur noch paarweise auf. Aus diesem Grund spricht man da von elektromagnetischen Feldern,
Wellen und Strahlung. Durch den Menschen verursachte Felder treten auf bei
•
•
•
•
•
•
Bis heute konnte ausser der thermischen Wirkung kein gesundheitlicher Einfluss der Felder auf
die Menschen nachgewiesen werden. Um Schäden durch eine thermische Wirkung zu vermeiden,
gibt es gesetzliche Grenzwerte. Der sogenannte SAR-Wert legt fest wie gross die umgewandelte
Wärmeleistung im menschlichen Körper betragen darf.
8.1.3 Licht
Das Licht ist ein Frequenzbereich des Elektromagnetischen Spektrums von 300 GHz bis 1.5 PHz.
Hier spricht man selten von der Frequenz, sondern vielmehr von der Wellenlänge, diese beträgt
1 mm bis 50 nm. Dazu gehören das Infrarotlicht (IR), das sichtbare Licht und das ultraviolette
Licht (UV). Für diesen Frequenzbereich gelten die optischen Gesetze.
Licht, vor allem das UV Licht kann negative gesundheitliche Wirkungen auf den Menschen
haben. Augen und Haut sind sehr empfindlich auf hohe Dosen von Licht. Häufige und starke
UV Dosen erhöhen das Hautkrebsrisiko signifikant. Aus diesem Grund sollten wir uns am Strand
und in den Bergen mit Sonnencreme schützen und eine Brille mit UV-Filter, sprich Sonnenbrille,
tragen.
8.1.4 Hohe Frequenzen
Die sehr hohen Frequenzen der elektromagnetischen Wellen bzw. die sehr kleinen Wellenlängen
von 1 nm bis 0.1 pm, sind die die am meisten Energie beinhalten. Die Strahlung wird wie folgt
unterteilt:
•
•
•
51
HSR Hochschule für Technik Rapperswil
Die Leistung ist bei diesen Strahlen so hoch, dass eine Ionisierung (Elektron wird aus dem Molekül oder Atom geschlagen) entsteht. Hohe Dosen oder regelmässiges Einwirken von Röntgenstrahlen
sind für den menschlichen Körper schädlich. Aus diesem Grund muss immer abgewogen werden
ob eine Röntgenbild mehr Nutzen oder Schaden mit sich bringt. Gammastrahlen und Kosmische
Strahlung sind sehr gesundheitsschädigend. Das natürliche Auftreten dieser Strahlung kommt
auf der Erde nur in sehr schwachen Dosen vor.
8.2 GSM Detektor
Im folgenden wollen wir eine Schaltung aufbauen, die Aussendungen des Handys detektiert.
Solche geschehen z.B. beim Ein- und Ausschalten des Handys oder falls ein Anruf getätigt
wird. Dabei ist egal, ob vom Handy aus oder aufs Handy telefoniert wird. Solch eine Schaltung
leistet auch gute Dienste in einer Umgebung, in der der Rufton ausgeschaltet werden muss. Ein
ankommender Anruf wird dann durch Aufleuchten der roten Leuchtdiode des GSM-Detektors
angezeigt.
8.2.1 Die Geschichte von GSM
In den frühen 80er Jahren wurden analoge Mobiltelefone in Europa, vor allem in Skandinavien
und England, aber auch in Frankreich und der Schweiz immer beliebter. Jede Nation entwickelte
dabei ihr eigenes System, das zu allen anderen Systemen inkompatibel war. Die Nachteile
waren hohe Kosten, da die Systemkomponenten und Kundengeräte nur für das jeweilige Land
hergestellt wurden und somit keine grossen Absatzzahlen zusammenkamen. Ein immer stärker
zusammenwachsender europäischer Markt machte daher die Entwicklung eines einheitlichen
Standards für Mobile Telefonie nötig.
1982 gründete die CEPT (Conference of European Posts and Telegraphs) eine Studiengruppe,
die sich ’Groupe Spéciale Mobile’, kurz ’GSM’ nannte. Ziel der Gruppe war es, ein öffentliches
Mobiltelefonsystem für den europäischen Markt zu entwickeln. 1989 wurde die Verantwortung
für GSM an das ETSI (European Telecommunication Standards Institute) übergeben. Der erste
Teil der GSM-Spezifikation wurde 1990 veröffentlicht. Der erste kommerzielle Dienst startete
Mitte 1991 und bereits 1993 gab es 36 GSM-Netzwerke in 22 Nationen. Obwohl GSM für Europa
geschaffen wurde, wird es heutzutage nicht ausschliesslich in Europa eingesetzt. Heute gibt es
viele Hundert GSM-Netzwerke (einschliesslich der DCS-1800 und PCS-1900 Netze), die in mehr
als 200 Nationen im Betrieb sind. Anfang 1994 gab es 1.3 Millionen Netzteilnehmer, im Oktober
1997 bereits 55 Millionen. Ende 2002 waren es über 800 Millionen Netzteilnehmer und im Jahre
2006 über 1.5 Mia. Nachdem die USA recht verspätet mit einem GSM-Derivat namens PCS1900
in den GSM-Markt eingestiegen sind, gibt es nun auf jedem Kontinent der Erde GSM-Netze,
die Abkürzung steht nunmehr für ’Global System for Mobile Communications’.
Die Entwickler von GSM entschieden sich für ein bis dahin ungetestetes, digitales System.
Sie glaubten, dass Verbesserungen in Kompressionsalgorithmen und DSPs es möglich machen
würden, die gegebenen Anforderungen zu erfüllen, und das System kontinuierlich in Hinsicht auf
Qualität und Kosten zu verbessern. Die GSM-Spezifikation, ein mehr als 6.000 Seiten starkes
52
HSR Hochschule für Technik Rapperswil
Werk, beschreibt funktionale Aspekte und Schnittstellen für jede der funktionellen Einheiten des
Systems. Die Spezifikation versucht, Flexibilität und Innovationen zu Gunsten des Wettbewerbs
zu erlauben und gleichzeitig ausreichende Standardisierung vorzuschreiben, um problemlose
Zusammenarbeit zwischen den Netzkomponenten zu gewährleisten.
8.2.2 Bauanleitung
•
•
•
•
•
•
IC U1 gemäss Bestückungsplan einlöten. Markierung beachten!
Die Widerstände R1 bis R4 zuschneiden, bestücken und löten.
Kondensatoren C1 und C2 zuschneiden, bestücken und löten. (Kapazität beachten!)
Potentiometer R5 bestücken und löten.
Luftspule L1 wickeln (ca. 10 Windungen), Isolation entfernen, bestücken und löten.
Hochfrequenz-Diode D2 zuschneiden, bestücken und löten. Polarität beachten! Kathode
schwarz bezeichnet!
• Leuchtdiode D1 bestücken und löten. Polarität beachten!
• Batterieanschlusskabel anlöten. rot = Vpos, schwarz = Vneg
Abbildung 8.3: Schema des Mobilfunkdetektors
53
HSR Hochschule für Technik Rapperswil
Abbildung 8.4: Bestückungsplan Mobilfunkdetektor
Abbildung 8.5: Bottom-Ansicht Mobilfunkdetektor
8.2.3 Funktionstest des Mobilfunkdetektors
Sobald alle Bauteile bestückt sind und die Batterie angeschlossen ist, kann ein Funktionstest
durchgeführt werden. Dazu muss mit dem Potentiometer der Punkt gefunden werden, an dem
die Leuchtdiode zu leuchten beginnt. Von diesem Punkt aus muss das Potentiometer ein wenig
zurückgestellt werden, so dass die Leuchtdiode gerade nicht leuchtet. Nun kann durch Ein- und
Ausschalten des Mobiltelefons die Funktion des Detektors überprüft werden.
54
HSR Hochschule für Technik Rapperswil
Teil II
Zweites Semester
55
HSR Hochschule für Technik Rapperswil
9 Regelungstechnik
Abbildung 9.1: Unterschied zwischen Steuerung und Regelung
Man unterscheidet zwischen den zwei Begriffen Regelung und Steuerung. Das Steuern ist
ein rein vorwärts gerichteter Prozess ohne Rückkopplung. Die Ausgangsgrösse wird dabei nicht
überwacht und kann sich durch Störungen von aussen verändern.
In Abbildung 9.1 wird in der linken Spalte ein typisches Beispiel einer Steuerung gezeigt. Der
Mischer wird eingestellt, ohne dabei die tatsächliche Wassertemperatur zu überprüfen. Die resultierende Temperatur kann somit stark vom Sollwert abweichen. Auch allfällige Störungen,
wie z.B. das gleichzeitige Öffnen eines anderen Wasserhahns an der selben Rohrleitung, verursachen eine Temperaturabweichung.
Soll nun die Wassertemperatur konstant auf einen Sollwert gehalten werden, bedarf es einer
um über den Mischer die Temperatur anzupassen. Diese Rückkopplung ist
das Kennzeichen einer Regelung. Das Regeln ist ein Vorgang, bei dem die
,
im Beispiel die Wassertemperatur, fortlaufend gemessen wird und bei Abweichung über die
56
HSR Hochschule für Technik Rapperswil
, im Beispiel das Mischverhältnis, korrigiert wird. Eine Regelung besteht
immer aus einem geschlossenen Kreis, dem
.
z
w
e
y
Regler
Regelstrecke
x
Abbildung 9.2: Regelkreis
Die einzelnen Komponenten und Grössen, die in einem Regelkreis vorkommen, sind wie folgt
definiert:
Regler: Ist der Teil des Regelkreises, der die Regelstrecke (z.B. der Mischer) ansteuert und
versucht damit die Differenz zwischen SOLL- und IST-Wert zu minimieren.
Im vorherigen Beispiel ist dies
oder
.
Regelstrecke: Ist der Teil des Regelkreises, der vom Regler ausgeregelt werden soll.
Im Beispiel ist dies
.
Führungsgrösse (Soll-Wert) w: Vorgegebener Wert, auf dem die Regelgrösse durch die Regelung gehalten werden soll. Sie ist eine von der Regelung nicht beeinflusste Grösse und
wird von aussen zugeführt.
Im Beispiel ist dies
.
Regelgrösse (Ist-Wert) x: Ist die Ausgangsgrösse der Regelstrecke, die gemessen und zum
Vergleich rückgeführt wird.
Im Beispiel ist dies
.
Regelabweichung e: Differenz zwischen Führungsgrösse und Regelgrösse e = w − x, bildet die
eigentliche Eingangsgrösse des Reglers.
Stellgrösse y: Ausgangsgrösse der Regeleinrichtung und zugleich Eingangsgrösse der Strecke.
Sie überträgt die steuernde Wirkung des Reglers auf die Strecke.
.
Im Beispiel ist dies
Störgrösse z: Eine von aussen wirkende Grösse, die eine Änderung des Ist-Wertes bewirkt und
einen Regelvorgang auslöst.
Im Beispiel ist dies
.
57
HSR Hochschule für Technik Rapperswil
10 FM Radiosender
Weltweit senden Radiostationen ihre Musikprogramme über Rundfunk aus. Dabei werden verschiedene Frequenzen und Modulationsarten (AM/FM) verwendet. Die Tabelle 10.1 enthaltet
eine Übersicht der benutzten Frequenzbänder. Früher waren Lang- und Mittelwellen weit verbreitet. Dank der grossen Reichweite von mehreren 100 km, waren sie auch über die Landesgrenzen empfangbar. Bei Lang-, Mittel- und Kurzwellen wird die Amplitudenmodulation (AM)
angewendet, die den Vorteil hat, dass die Empfänger sehr einfach aufgebaut sein können. Bei
diesen AM-Signalen wird zudem die Audio-Bandbreite auf etwa 4.5 kHz begrenzt. Die Klangqualität ist nicht besonders hoch und ist vergleichbar mit der Qualität eines Telefons.
Erst mit der Einführung der Frequenzmodulation (FM) wurden bessere Audioqualitäten möglich.
Die heute bekannten Radiostationen benutzen die Frequenzmodulation und senden ihre Programme im UKW-Band (87.5-108 MHz) aus.
Bezeichnung
Langwellen (LW)
Mittelwellen (MW)
Kurzwellen (KW)
Ultrakurzwellen (UKW)
Frequenzbereich
30 kHz
300 kHz
3 MHz
30 MHz
bis 300 kHz
bis 3000 kHz
bis 30 MHz
bis 300 MHz
Wellenlänge
Rundfunk
1-10 km
100-1000 m
10-100 m
1-10 m
148.50-283.50 kHz
520-1620 kHz
87.5-108 MHz
Tabelle 10.1: Übersicht der Frequenzbänder beim Rundfunk
Amplitudenmodulation Bei AM wird die Amplitude des Trägersignals moduliert. Die momentane Spannung des Audiosignals bestimmt die Amplitude des Trägersignals. Die Frequenz
ist konstant.
Frequenzmodulation Bei AM wird die Frequenz des Trägersignals moduliert. Die momentane
Spannung des Audiosignals bestimmt die Frequenz des Trägersignals. Die Amplitude ist
konstant.
58
HSR Hochschule für Technik Rapperswil
10.1 Bau eines UKW/FM-Radiosender
Die folgende Schaltung in Abbildung 10.1 stellt einen einfachen UKW-Minisender dar. Der
Minisender benutzt das Audiosignal von z.B. einem MP3-Player um das Trägersignal im UKWBand mit FM zu modulieren. Das erzeugte Signal kann somit mit einem gewöhnlichem Radio
empfangen werden.
Abbildung 10.1: Schema des FM Radiosenders
Aufgabe: Nun soll die obige Schaltung zusammengelötet werden. Zur Verfügung steht eine
Veroboard-Leiterplatte, auf der die Bauteile geeignet positioniert und untereinander verbunden werden müssen. Die Leiterplatte besteht aus verschiedenen parallelen Leiterbahnen, die untereinander isoliert sind. Um zwei Leiterbahnen miteinander zu verbinden,
kann eine Drahtbrücke benutzt werden. Falls nötig können einzelne Leiterbahnen mit einem Bohrer aufgetrennt werden. Die Vorlage in Abbildung 10.2 dient als Hilfe für die
Skizzierung der Bauteile-Anordnung.
Hinweis: Es ist möglich die Schaltung mit nur zwei Brücken und keiner zusätzlichen
Auftrennung zu realisieren.
Abbildung 10.2: Vorlage für Veroboard-Schaltung
59
HSR Hochschule für Technik Rapperswil
10.2 UKW-Minisender: Rechtliche Grundlagen
Das Bundesamt für Kommunikation (BAKOM) schreibt Folgendes auf ihrer Website
(http://www.bakom.ch/themen/geraete/00568/00569/index.html?lang=de):
UKW-Minisender
In der Schweiz dürfen Minisender, die den UKW-Frequenzbereich (87.5 - 108 MHz) nutzen, unter
bestimmten Voraussetzungen in Verkehr gebracht werden. Damit der Handel und Betrieb solcher
UKW-Minisender erlaubt sind, müssen unter anderem folgende Grundregeln eingehalten werden:
Wahl des Sendekanals, beschränkte Leistung, automatische Abschaltung bei fehlendem Signal.
Minisender, die den UKW-Frequenzbereich (87.5 - 108 MHz) nutzen, dürfen in der Schweiz gemäss
der Empfehlung der CEPT (Europäische Konferenz für Post und Fernmeldewesen) über die Nutzung von Geräten mit kurzer Reichweite (ERC/REC 70-03) angeboten, in Verkehr gebracht und
betrieben werden.
Geräte, welche die unten beschriebenen Anforderungen nicht erfüllen, dürfen weder angeboten,
noch in Verkehr gebracht oder betrieben werden.
Anforderungen
Minisender sind gemäss Fernmeldegesetz Funkanlagen und müssen deshalb zwingend die Anforderungen der Verordnung über Fernmeldeanlagen erfüllen.
Minisender müssen ein Konformitätsbewertungsverfahren (bei dem geprüft wird, ob die grundlegenden Anforderungen eingehalten werden) erfolgreich durchlaufen haben und die übrigen Voraussetzungen für das Inverkehrbringen (Meldung beim BAKOM, Konformitätserklärung, Kennzeichnung der Anlage und Benutzerinformationen) erfüllen. Ausserdem müssen sie zwingend den in der
Schnittstellenanforderung RIR 1013-19 definierten technischen Parametern und Anforderungen
entsprechen. Dabei handelt es sich im Wesentlichen um folgende Anforderungen:
• Der Nutzer muss die Möglichkeit haben, einen Sendekanal im gesamten UKWFrequenzbereich (87.6 - 107.9 MHz) frei zu wählen;
• Die maximale Strahlungsleistung darf 50 nW e.r.p. nicht überschreiten;
• Die Anlage muss über eine eingebaute Antenne ohne Anschlussstecker verfügen;
• Die Anlage muss innerhalb einer Minute, nachdem am Audio-Eingang kein Signal mehr
empfangen wird, aufhören zu senden.
Der eben gebaute Minisender hält nicht ganz alle Anforderungen ein und darf so eigentlich
nicht in Betrieb genommen werden:
✘
✘
✔
✘
✔
✘
Konformitätsbewertungsverfahren erfolgreich durchlaufen
Meldung beim BAKOM
Sendekanal im UKW-Frequenzbereich (87.6 - 107.9 MHz) frei wählbar
Maximale Strahlungsleistung von 50 nW e.r.p.
Eingebaute Antenne ohne Anschlussstecker
Automatisches Ausschalten nach einer Minute ohne Audiosignal
60
HSR Hochschule für Technik Rapperswil
11 Büchsen und andere Antennen
Antennen gehören zum heutigen Alltagsbild. Sie finden z.B. Verwendung beim Radio, Fernsehen, Mobilfunk, WLAN, GPS, u.v.m. Das Wort “Antenne” kommt vom lateinischen Wort
“antenna” = (Segel)stange. Antennen gibt es seit über 100 Jahren. Antennen aus gestrecketen Drähten gehen zurück auf den deutschen Physiker Heinrich Hertz, der im Jahre 1887 mit
seinen Versuchen die Wellenausbreitungstheorie des englischen Physikers James Clerk Maxwell
aus dem Jahr 1865 überprüfen wollte. Der Erfinder Nikola Tesla konnte bereits Ende 1896
mit einer Sendestation in New York und einer 30 Kilometer entfernten Empfangsstation gute
Fernübertragungsergebnisse erzielen. Der Physiker Guglielmo Marconi baute auf dem Wissen
Teslas auf und ihm gelang im Jahre 1901 die erste transatlantische Funkübertragung von Irland
nach Neufundland (Kanada).
Die Antenne hat die Aufgabe, die vom Sender ausgehende Leitungswelle in die Freiraumwelle überzuführen oder umgekehrt die Freiraumwelle aus dem Raum aufzunehmen und in die
Leitungswelle überzuführen, die dann dem Empfänger zugeführt wird, siehe Abbildung 11.1.
Abbildung 11.1: Die Antenne als Übertragungselement.
Die einfachste Antenne, die man sich vorstellen kann, ist die sogenannte Dipol-Antenne. In
Abbildung 11.2 sieht man, dass die Dipol-Antenne aus zwei geraden Drahtstäbe besteht, deshalb
der Name Dipol (Zwei-Pol).
U
Abbildung 11.2: Hochfrequenz-Generator mit Dipol-Antenne
Die Wechselspannung des Hochfrequenz-Generators bewirkt zwischen den beiden Pole ein Aufund Abbauen der elektrischen und magnetischen Felder. Falls die Gesamtlänge des Dipols
61
HSR Hochschule für Technik Rapperswil
genau der halben Wellenlänge λ2 des Hochfrequenzsignals entspricht, kommt es zur Ablösung
der elektromagnetischen Felder von der Antenne. In Abbildung 11.3 ist der Ablöse-Vorgang
detailliert zu sehen. Die Wellenlänge λ (sprich: Lambda) berechnet sich wie folgt: λ = fc , wobei
c = Lichtgeschwindigkeit (≈ 300′ 000′000 m/s) und f = Frequenz des Signals in Hertz.
I=0
+
t=0
I
t=T/4
I=0
t=T/2
+
λ/2
I
t=3T/4
λ/2
Abbildung 11.3: Zeitliche Entwicklung des elektrischen Feldes bei einer Dipol-Antenne
Abbildung 11.4: Monopol-Antenne
Falls man bei der Dipol-Antenne den unteren Stab mit einer leitenden Fläche ersetzt, bekommt
man die Monopol-Antenne. Sowohl der Dipol, wie auch der Monopol werden dort eingesetzt,
wo der Empfang bzw. die Ausstrahlung in alle Richtungen gleich gut erfolgen soll. Die Länge
der Monopol-Antenne beträgt stets λ4 . Die typischen Anwendungsorte von Monopol-Antennen
und deren Längen sind z.B.:
•
,
λ
4
=
•
,
λ
4
=
•
,
λ
4
=
62
HSR Hochschule für Technik Rapperswil
11.1 Weitere Antennenformen
Je nach Anwendung kommen verschiedene Antennenformen in Einsatz, weil unterschiedliche
Eigenschaften erforderlich sind. Bei einer Antenne unterscheidet man folgende Kenngrössen:
Wirkungsgrad, Richtcharakteristik, Gewinnfaktor, Bandbreite, Wirkfläche.
Patch-Antenne
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
Yagi-Uda Antenne
obere Halbkugel
mittel
schmal
GPS-Empfänger
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
Parabol-Antenne
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
Logarithmisch-periodische Antenne
sehr schmale Keule
sehr hoch
mittel
Sat-TV, Richtfunk
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
Büchsen-Antenne
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
schmale Keule
hoch
mittel
TV-Empfang
schmale Keule
hoch
sehr breit
Messungen, TV
Helix-Antenne
mittlere Keule
mittel
schmal
W-LAN
Richtwirkung:
Gewinn:
Bandbreite:
Anwendung:
63
obere Halbkugel
mittel
schmal
GPS-Empfänger
HSR Hochschule für Technik Rapperswil
11.2 Büchsenantenne bauen
In diesem Abschnitt werden die Einzelheiten erklärt, die für den Bau einer Büchsenantenne
nötig sind. Wobei die folgenden numerischen Berechnungen nur für die Frequenz von 2.4 GHz
gelten, bei der z.B. das Wireless-LAN funktioniert. Mit einem geeignetem Kabel kann die selber
gebaute Antenne sogar am eigenen WLAN-Router betrieben werden, um damit die Reichweite
zu erhöhen.
Die Büchsenantenne besteht grundsätzlich aus zwei Teilen: Einem λ4 -Monopol und einer zylinderförmige, leitende Büchse drumherum. Der Monopol strahlt die HF-Wellen ab und die
Büchse bündelt sie zusammen. Damit wird eine grössere Richtwirkung erreicht, das wiederum
eine Verstärkung des Signals bewirkt.
mind. 3/4 Lg
Lg/4
D
Lo/4
Abbildung 11.5: Abmessungen der Büchsenantenne
Die eine Hälfte der ausgestrahlten Wellen werden von der hinteren Büchsenwand nach vorne
reflektiert. Somit steht in Richtung der Büchsenöffnung die doppelte Leistung zur Verfügung.
Damit dies auch richtig funktioniert, muss sowohl die Länge L0 /4 des Monopols, wie auch der
Abstand Lg /4 vom Monopol zur hinteren Wand genau abgemessen werden. Die Länge L0 /4
des Monopols berechnet sich für die W-LAN-Frequenz wie folgt:
Lo /4 =
299792458 ms
c
=
= 0.0306 m = 30.6 mm
4·f
4 · 2450000000 Hz
(11.1)
wobei c der Lichtgeschwindigkeit und f der Sendefrequenz entspricht. Der Abstand Lg /4 ist
vom Büchsendurchmesser abhängig und kann nach folgender Gleichung berechnet oder aus
Abbildung 11.6 ermittelt werden.
1
Lg /4 = r 2
1
4
−
L0
1
= r
2
2
2450000000 Hz
1
4
−
1.706·D
299792458 m
s
[Meter]
(11.2)
2
1
1.706·D
In Abbildung 11.7 ist zudem die Richtcharakteristik einer solchen Büchsenantenne angegeben. Gegenüber den üblichen Monopol-Antennen, die in WLAN-Routern eingesetzt werden,
64
HSR Hochschule für Technik Rapperswil
kann mit dieser Büchsenantenne die erreichbare Distanz etwa verdoppelt werden. Wird beim
Empfänger ebenfalls eine solche Antenne eingesetzt, kann die erreichbare Distanz gar vervierfacht werden.
11
W−LAN (2.45 GHz)
10
Abstand Lg/4 in cm
9
8
7
6
5
4
3
7
8
9
10
11
12
13
Büchsendurchmesser D in cm
14
15
Abbildung 11.6: Bestimmung des richtigen Abstandes zwischen Monopol und Büchsenwand.
90
120
60
10
5
150
30
0
−5
−10
180
0
210
330
240
300
270
Abbildung 11.7: Richtcharakteristik einer Büchsenantenne (D=8.5cm, L=18cm),
Antennengewinn in dBi.
65
HSR Hochschule für Technik Rapperswil
12 Digitale Logikschaltungen
Die Digitaltechnik ist in allen elektronischen Geräte vorhanden (z.B. Computer, Mobiltelefone,
Spielkonsolen, Taschenrechner und vieles mehr), denn diese Geräte arbeiten hauptsächlich mit
digitalen Werte. In der Elektronik unterscheidet man zwischen digitalen und analogen Werten
oder Signalen, siehe Abbildung 12.1. Analoge Werte können unendliche viele Zwischenwerte
annehmen. Deren Abstufung ist kontinuierlich, d.h. die Auflösung ist unendlich fein, es gibt
kein “Raster”. Das Wort digital stammt vom lateinischen digitus und heisst “Finger”. Digitale Grössen besitzen eine endliche Anzahl an Zwischenwerte. Man kann sie “an den Fingern
abzählen”.
5
5
4
4
3
3
2
2
1
1
0
0
analoge Werte
t
digitale Werte
t
Abbildung 12.1: Unterschied zwischen analogen und digitalen Werte
In der natürlichen Welt, die uns umgibt, ist praktisch alles analog, z.B. Temperatur, Lichtstärke,
Druck, Geschwindigkeit. Es existiert nicht nur Weiss oder Schwarz, sondern dazwischen gibt es
unendlich viele Grautöne, wie es unendlich viele Farben gibt. Um diese analogen Grössen mit
einem digitalen System, sei dies z.B. ein Computer oder eine Fotokamera, einfach bearbeiten
und speichern zu können, müssen diese Grössen zuerst digitalisiert werden. Das heisst, dass die
Zahl der Abstufungen begrenzt wird. In Abbildung 12.2 sieht man wie ein analoger Farbverlauf
digitalisiert wird.
a)
b)
Abbildung 12.2: a) analoger Farbverlauf mit unendlich vielen Graustufen; b) mit 8 Graustufen
digitalisierter Farbverlauf
Eine digitale Grösse kann also nur eine endliche Anzahl Werte annehmen. Im obigen Beispiel sind es 8 Graustufen. Nun kann man jeder Stufe eine Zahl zuordnen z.B. 0 bis 7, wobei
66
HSR Hochschule für Technik Rapperswil
Schwarz=0 und Weiss=7. Das Speichern einer digitalen Farbe geschieht nun so, dass man sich
einfach die zugehörige Zahl notiert.
12.1 Binäres Zahlensystem
In der Digitaltechnik werden Zahlen nicht im dezimalen Zahlensystem, sondern im binären
Zahlensystem dargestellt. Dies hat den Vorteil, dass bei jeder Stelle nur zwei Werte vorkommen,
nämlich 0 oder 1. Das binäre Zahlensystem wurde gewählt, weil man in digitalen Schaltungen
nur zwei Zustände unterscheiden kann. Diese sogenannten binären Zustände können einfach in
physikalischen Zuständen übersetzt werden, z.B. Ein oder Aus, 0 oder 5 Volt, hell oder dunkel,
(H)igh oder (L)ow, wahr oder falsch, etc. Die Tabelle 12.1 zeigt wie Zahlen im dezimalen und
binären Zahlensystem dargestellt werden.
dezimales Zahlensystem
···
103 = 1000
102 = 100
101 = 10
100 = 1
0
0
0
0
0
0
0
2
0
0
1
3
0
1
0
9
dezimale Zahl
binäres Zahlensystem
···
23 = 8
22 = 4
21 = 2
20 = 1
0
0
0
1
1
0
0
0
0
1
0
0
1
0
1
0
1
0
1
1
dezimale Zahl
Tabelle 12.1: Darstellung von Zahlen im Binär- und Dezimalsystem
12.2 Schaltalgebra
In der Digitaltechnik werden digitale Signale mittels sogenannten logischen Verknüpfungen verarbeitet. Diese Verknüpfungen lassen sich mit einer besonderen Art von Mathematik beschreiben, die sogenannte Boolesche Algebra oder Schaltalgebra. Wie in der “normalen” Algebra kommen auch hier Formeln und Variablen vor. Eine Variable kann jeweils nur die Werte
1=wahr oder 0=falsch annehmen. Das Verhalten einer logischen Verknüpfung kann mit einer
Funktionsgleichung beschrieben oder mittels einer Wahrheitstabelle dargestellt werden. Eine
Wahrheitstabelle listet alle mögliche Kombinationen der Eingangsvariablen mit dem jeweiligen
Ausgangsresultat auf.
67
HSR Hochschule für Technik Rapperswil
In der Booleschen Algebra sind folgende drei logischen Grundverknüpfungen definiert:
UND-Verknüpfung (engl. AND)
Bei der UND-Verknüpfung ist der Ausgang nur dann 1, wenn alle Eingänge auch 1 sind.
A
&
B
Y
Die Funktionsgleichung lautet Y = A ∧ B oder Y = A · B. Die Wahrheitstabelle lautet
A
B
0
0
1
1
0
1
0
1
Y
ODER-Verknüpfung (engl. OR)
Bei der ODER-Verknüpfung ist der Ausgang gleich 1, wenn mindestens ein Eingang gleich 1
ist.
A
1
B
Y
Die Funktionsgleichung lautet Y = A ∨ B oder Y = A + B. Die Wahrheitstabelle lautet
A
B
0
0
1
1
0
1
0
1
Y
NICHT-Verknüpfung (engl. NOT)
Die NICHT-Verknüpfung besitzt nur einen Eingang. Der Ausgang ist nur dann 1, wenn der
Eingang 0 ist.
1
A
Y
Die Funktionsgleichung lautet Y = A. Die Wahrheitstabelle lautet
A
Y
0
1
68
HSR Hochschule für Technik Rapperswil
12.3 Praxisbeispiel: Alarmanlage
Nun soll eine Alarmanlage gebaut werden, die mit digitaler Logik arbeitet. In der untenstehenden Skizze sind die einzelnen Komponenten ersichtlich, die in dieser Schaltung vorkommen. Mit
dieser Alarmanlage kann man z.B. die Türe des eigenen Zimmers absichern. Sobald die Türe
geöffnet wird, ertönt ein lauter Alarmton.
Sirene
Türe
Betriebs-LED
on
off
Alarm-LED
Mikroschalter
5V-Regler
Digitale Logik
9V-Batterie
Reset-Taste
Alarm-Taste
Aufgabenbeschreibung: Die Betriebs-LED soll immer leuchten solange die Schaltung eingeschaltet ist. Die Alarm-LED und die Sirene sollen erst dann aktiv werden, sobald die
Alarm-Taste gedrückt wird und/oder der Mikroschalter sich öffnet. Die Alarm-LED und
die Sirene müssen weiterhin eingeschaltet bleiben, auch wenn die Alarm-Taste oder der
Mikroschalter wieder losgelassen werden.
Definiere nun die entsprechenden Funktionsgleichungen für die beiden Ausgangsvariablen:
Funktionsgleichungen
Betriebs-LED
=
Alarm
=
Vervollständige die fehlende Logikschaltung in Abbildung 12.3 so, dass sich die Schaltung gleich
den beiden Funktionsgleichungen verhält. Benutze die gleichen Symbole für die UND-/ODERVerknüpfungen wie sie im Abschnitt 12.2 definiert wurden.
69
HSR Hochschule für Technik Rapperswil
+5V
5V
Spannungsregler
Schiebeschalter
9V Batterie
47uF
+5V
GND
GND
47uF
GND
GND
Logikschaltung
+5V
Betriebs-LED
+5V
Reset-Taste
+5V
1k
GND
1k
grün
Alarm-Taste
+5V
rot
GND
Mikroschalter
Alarm
BC 547 C
GND
10k
GND
GND
Abbildung 12.3: Logikschaltung der Alarmanlage
12.3.1 Veroboard-Layout
Nun soll die in Abbildung 12.3 definierte Schaltung in Hardware übersetzt werden. Dabei wird
die Schaltung komplett auf Veroboard verdrahtet. Überlege zuerst wie du die Komponenten
auf das Veroboard anordnen willst und zeichne dann das Layout der Schaltung auf Papier auf.
Benutze die untenstehende Vorlage, um dein Layout zu zeichnen. Zeichne auch die nötigen
Unterbrechungen und Drahtbrücken ein.
70
HSR Hochschule für Technik Rapperswil
Die einzelnen UND-/ODER-Verknüpfungen sind als ICs (Integrierte Schaltkreise) vorhanden.
Die jeweiligen Pinbelegungen der beiden ICs sind in Abbildung 12.4 dargestellt. Über die Pins
7 und 14 werden die ICs gespiesen, d.h. Pin 7 muss mit dem Ground (0V) und Pin 14 mit dem
Spannungsregler (+5V) verbunden werden.
14
13
12
11
10
9
14
8
13
12
11
10
9
+5V
+5V
&
1
&
&
1
1
&
1
GND
GND
1
8
2
3
4
5
6
1
7
74HCT08: 4 UND-Verknüpfungen
2
3
4
5
7
74HCT32: 4 ODER-Verknüpfungen
Abbildung 12.4: Pinbelegung der Logik-ICs
Vout
6
GND
Vin
Abbildung 12.5: Pinbelegung des Spannungsreglers LM7805
Menge
Beschreibung
Wert/Typ
Lieferant, Art. Nr.
1
1
1
1
1
2
1
1
1
1
2
1
1
Quad 2 Input AND
Quad 2 Input OR
Spannungsregler 5V
Miniatur Signalgeber
Laborkarte FR2
IC-Sockel
LED rot
LED grün
NPN-Transistor
Mikroschalter
Printtaste
Schiebeschalter
Batteriekabel
7408
7430
7805
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
Distrelec,
DIL14
BC547C
Tabelle 12.2: Stückliste der Alarmanlage
71
647589
647626
647078
560650
450124
650555
632045
632040
610359
230167
200525
200180
970038
HSR Hochschule für Technik Rapperswil
13 Mikrocontroller
Mikrocontroller (µC) bilden das Herzstück von unzähligen Geräten und Steuersystemen, wie
z.B. Spielkonsolen, Kaffeemaschinen, Mobiltelefone, Fernsehgeräten, Armbanduhren und vieles
mehr. Ein Mikrocontroller beinhaltet hauptsächlich einen Prozessor, Speicher, digitale Einund Ausgänge und verschiedene Peripherien wie Timer oder A/D-Wandler. Alles ist in einem
einzigen Chip integriert.
Ein µC ist in der Lage, wie ein PC-Prozessor auch, sehr viele Befehle in sehr kurzer Zeit durchzuführen. Er kann Zahlen miteinander verrechnen und vergleichen, digitale Signale einlesen
und ausgeben. Die Befehlsliste, auch “Programm” genannt, wird als binären Code im Speicher
abgelegt und der µC arbeitet diesen der Reihe nach ab, wobei auch Sprünge in der Befehlsliste
programmierbar sind. Der Mikrocontroller hat somit keine Eigenintelligenz. Er führt nur das
aus, was das “Programm” beinhaltet.
Bei unserem Board setzen wir ein MSP430-Mikrocontroller von Texas Instruments ein. Dieser
besitzt 6 Ports mit je 8 Anschluss-Pins die als digitale Ein-/Ausgänge dienen oder Spezialfunktionen bieten. Auf unserem µC-Board sind nun mehrere Komponenten mit dem Mikrocontroller
verbunden um unzählige Anwendungen realisieren zu können. Die externen Quarze liefern die
Takte für den Mikrocontroller. Eine Übersicht der einzelnen Komponenten auf dem µC-Board
liefert die Abbildung 13.1.
ϯϮ͘ϳϲϴŬ,nj
YƵĂƌnj
ϴ͘ϬD,nj
YƵĂƌnj
ydϭ
ƵĚŝŽ
ŝŶͲͬ
ƵƐŐĂŶŐ
Wϲ
ϴ
^ĐŚĂůƚĞƌ
Wϭ
ydϮ
>
Wϱ
ŵŝĐƌŽ^
D^WϰϯϬ
&ϭϲϭϭ
Wϰ
ϮdĂƐƚĞƌ
ϴ>
h^
WϮ
Wϯ
&ƌĞŝĞ/ͬK
^ĞŶƐŽƌ
Abbildung 13.1: Übersicht der Komponenten auf dem µC-Board.
72
HSR Hochschule für Technik Rapperswil
13.1 Programmierung des Mikrocontrollers
Wie gesagt, muss dem µC die Befehlsliste (Programm) in digitaler Form, also als binären
Code, abgeliefert werden. Dies ist die einzige “Sprache”, die der µC versteht. Um den µC zu
“programmieren” schreibt man nun nicht den binären Code direkt, sondern man benutzt eine
sogenannte Hochsprache. Mit Hilfe eines Übersetzungsprogramms, dem sogenannten Compiler,
wird das Programm dann in binären Code übersetzt.
Wir benutzen als Hochsprache die Programmiersprache C. Das C-Programm wird als Text (sog.
Quelltext) in einer oder mehreren Textdateien (sog. Quelldateien) auf dem PC geschrieben.
Dieser Text kann in einem simplen Texteditor geschrieben werden. Quelldateien haben die
Endung “.c”. Der Compiler übersetzt die einzelnen Quelldateien zu Objektdateien, die binären
Code enthalten. Ein weiteres Programm, der sog. Linker, fügt schliesslich alle Objektdateien zu
einer einzelnen Binärdatei zusammen. Diese beinhaltet den ausführbaren Binärcode, der nun
in den µC “heruntergeladen” werden kann.
main.c
adc.c
main.o
Compiler
adc.o
lcd.c
lcd.o
Quelltext-Dateien
Objekt-Dateien
Linker
*.elf
binäre Datei enthält
ausführbaren Code
Abbildung 13.2: Übersetzung der Quelldateien zum ausführbaren Code.
Eine Beschreibung um die nötige Software wie Texteditor, Compiler und USB-Treiber zu installieren ist im Abschnitt 13.4.2 zu finden.
13.1.1 Die Struktur eines C-Programms
In diesem Abschnitt werden die wichtigsten Bestandteile eines C-Programms anhand eines
Beispiels erläutert. Ein C-Programm besteht aus einzelnen “Bausteinen”, sogenannte Funktionen, die eine bestimmte Aufgabe lösen und sich gegenseitig aufrufen können. Wobei jedes
C-Programm eine Funktion mit dem Namen main() besitzt. Diese Funktion bildet das steuernde Hauptprogramm und wird automatisch nach jedem Start des µC aufgerufen. Die Bedeutung
der weiteren Codezeilen kann im Buch C kurz und gut auf den angegebenen Seiten nachgeschlagen werden.
73
HSR Hochschule für Technik Rapperswil
Listing 13.1: beispiel.c
1
/*
D a t e i n a m e:
Beschreibung:
2
3
4
b e i s p i e l. c
Dies ist ein B e i s p i e l p r o g r a m m .
*/
5
6
# i n c l u d e " ../ System . h "
// P r a e p r o zes sor - D i r e k t i v e n ( Buch S .69)
int Summe ( int a , int b );
// F u n k t i o n s p r o t o t y p ( Buch S .59)
int main ( void )
{
int Zahl1 ;
int Zahl2 ;
// H a u p t f u n k t i o n main ()
7
8
9
10
11
12
13
// V a r i a b l e ( Buch S .13)
// V a r i a b l e ( Buch S .13)
14
15
I n i t _ S y s t e m ();
// F u n k t i o n s a u f r u f ( Buch S .62)
Zahl1 = 3;
Zahl2 = 7;
// Z u w e i s u n g ( Buch S .24)
// Z u w e i s u n g ( Buch S .24)
16
17
18
19
P4OUT = Summe ( Zahl1 , Zahl2 ); // F u n k t i o n s a u f r u f und Z u w e i s u n g
20
21
return 0;
22
23
// R u e c k g a b e w e r t ( Buch S .62)
}
24
25
26
27
28
int Summe ( int a , int b )
{
return a + b ;
}
// F u n k t i o n s d e f i n i t i o n ( Buch S .60)
// R u e c k g a b e w e r t ( Buch S .62)
Das obige Beispiel zeigt die Struktur eines C-Programms. Das Programm besteht aus den
Funktionen main() und Summe(). Es zeigt die Summe zweier Zahlen als binäre Zahl durch die
LEDs an.
Grössere C-Programme werden in der Regel in mehreren Quelldateien aufgeteilt und getrennt
bearbeitet. Dabei werden zusammengehörende Funktionen in dieselbe Quelldatei zusammengefasst. Informationen, die in mehreren Quelldateien erforderlich sind, wie z.B. Funktionsprototypen, werden in Header-Dateien (*.h) gestellt. Diese Dateien können mit der #include-Direktive
in eine Quelldatei kopiert werden.
Weitere Details über den Bestandteilen eines C-Programms, die ein Programmierer kennen
muss, findet man im Buch auf den folgenden Seiten:
Variablen und Datentypen
Arithmetische Operatoren, ...
Anweisungen (if, while, switch, ...)
Funktionen
Buch
Buch
Buch
Buch
S.
S.
S.
S.
12-20
21-31
34-40
58-64
Tabelle 13.1: Die wichtigsten Kapitel aus dem Buch
74
HSR Hochschule für Technik Rapperswil
13.2 Funktionen aus System.h
Um die Programmierung mit unserem µC-Board zu erleichtern, wurde eine Reihe von nützlichen
Funktionen geschrieben, die die verschiedenen Komponenten auf dem Board ansteuern. Diese Funktionen sind in der Quelldatei System.c enthalten und können über die Header-Datei
System.h in das eigene Projekt mit #include importiert werden. Diese Funktionen werden nun
hier aufgelistet:
void Init System(void) Diese Funktion setzt die wichtigsten Grundeinstellungen, die für das
Mikrocontroller-Board nötig sind, wie z.B. das Initialisieren der Ports oder das Aktivieren
der externen Quarze für die Taktgenerierung.
void Delay ms(unsigned long d) Diese Funktion haltet die Programmausführung für eine definierte Zeit an. Die Zeit wird mittels dem Parameter d in Millisekunden angegeben.
Gültiger Wertebereich für d : 0...4’294’967’295.
void Init TimerA(unsigned int CCR0 Wert) Diese Funktion initialisiert den Timer A. Mit
dem Parameter CCR0 Wert wird das Zeitintervall bestimmt, nach dessen Ablauf der
Timer periodisch ein Interrupt auslöst. Die Wiederholfrequenz des Timers berechnet sich
8000000
wie folgt: F (in Hz) = CCR0
. Gültiger Wertebereich: 0...65’535.
Wert
void Init UART(void) Initialisiert die serielle Schnittstelle (UART), die über USB mit dem
PC kommuniziert. Die Einstellungen sind wie folgt:
Baudrate 9600
Datenbits
8
Parität
N
Stoppbits
1
void Init LCD(void) Diese Funktion schaltet das Display ein und führt die nötigen Initialisierungen durch.
void lcdInstr(char cmd) Mittels dieser Funktion können verschiedene Befehle an das Display
gesendet werden. Mögliche Befehle sind:
LCD ON
Display einschalten.
LCD OFF
Display ausschalten.
LCD CLEAR
Display löschen.
LCD LINE1
Springt zum Anfang der ersten Zeile.
LCD LINE2
Springt zum Anfang der zweiten Zeile.
LCD CURSORON
Schaltet den Cursor ein.
LCD CURSOROFF Schaltet den Cursor aus.
void printf Auswahl(int Eingabe) Mittels dieser Funktion kann definiert werden, auf welcher
Hardware die printf - und puts-Funktion ihre Zeichen ausgeben soll. Mögliche Werte für
den Parameter Eingabe sind:
LCD
Wählt das Display als Ausgabemedium. Standardeinstellung.
UART Wählt die serielle Schnittstelle (USB) als Ausgabemedium.
75
HSR Hochschule für Technik Rapperswil
void Init ADC12(int Eingabe) Diese Funktion initialisiert den Analog/Digital-Wandler. Mit
dem Parameter Eingabe wird der entsprechende Eingang selektiert, der gewandelt werden
soll. Die Auflösung beträgt 12 Bit und die Referenzspannung Uref wird entsprechend dem
Modus gesetzt. Mögliche Parameterwerte sind:
MUSIK Wählt den Audio-Eingang (Stereo-Signal). Uref = 3.3 V
POTI
Wählt das Potentiometer. Uref = 3.3 V
TEMP Wählt den Temperatursensor. Uref = 2.5 V
int ADC Einzelwandlung(void) Diese Funktion führt eine einzelne A/D-Wandlung durch und
gibt den digitalisierten Wert als Resultat zurück. Der Messwert liegt zwischen 0 (0 Volt)
und 4095 (Uref ). Diese Funktion kann nur in Modus POTI oder TEMP benutzt werden.
void Init DAC12(void) Diese Funktion initialisiert den Digital/Analog-Wandler. Die Auflösung
beträgt 12 Bit und die Referenzspannung beträgt 3.3 V. Der D/A-Wandler ist fest mit dem
Audio-Ausgangsverstärker verbunden.
13.3 Grundlegende Datentypen und Operatoren
Datentypen
Typ
Speicherplatz
Wertebereich
char
unsigned
short
unsigned
int
unsigned
long
unsigned
1
1
2
2
2
2
4
4
-128 bis 127
0 bis 255
-32768 bis 32767
0 bis 65535
-32768 bis 32767 oder -2147483648 bis 2147483647
0 bis 65535 oder 0 bis 4294967295
-2147483648 bis 2147483647
0 bis 4294967295
char
short
int
long
Byte
Byte
Byte
Byte
Byte oder 4 Byte
Byte oder 4 Byte
Byte
Byte
Typ
Speicherplatz
Wertebereich
Genauigkeit
float
double
4 Byte
8 Byte
1.2E-38 bis 3.4E+38
6 Stellen
2.3E-308 bis 1.7E+308 15 Stellen
76
HSR Hochschule für Technik Rapperswil
Arithmetische Operatoren
Operator
Bedeutung
Beispiel
Ergebnis
*
/
%
+
++
--
Multiplikation
Division
Modulodivision
Addition
Subtraktion
Inkrement
Dekrement
x*y
x/y
x%y
x+y
x-y
x++
x- -
Produkt von x und y
Quotient aus x und y
Rest bei der Division x/y
Summe von x und y
Differenz von x und y
x wird inkrementiert (x=x+1)
x wird dekrementiert (x=x-1)
Zuweisungsoperatoren
Operator
Bedeutung
Beispiel
Ergebnis
=
op=
einfache Zuweisung
zusammengesetzte Zuweisung
x=y
x += y
an x den wert von y zuweisen
x op= y ist äquivalent mit x = x op y
Vergleichsoperatoren
Operator
Bedeutung
Beispiel
Ergebnis: 1 (wahr) oder 0 (falsch)
<
<=
>
>=
==
!=
kleiner
kleiner gleich
grösser
grösser gleich
gleich
ungleich
x
x
x
x
x
x
wahr,
wahr,
wahr,
wahr,
wahr,
wahr,
<y
<= y
>y
>= y
== y
!= y
falls x kleiner als y
fall x kleiner oder gleich y
falls x grösser als y
falls x grösser oder gleich y
falls x gleich y
falls x ungleich y
Logische Operatoren
Operator
Bedeutung
Beispiel
Ergebnis: 1 (wahr) oder 0 (falsch)
&&
||
!
logisches UND
logisches ODER
logisches NICHT
x && y
x || y
!x
wahr, falls x und y ungleich 0
wahr, falls x oder y oder beide ungleich 0
wahr, falls x gleich 0
77
HSR Hochschule für Technik Rapperswil
13.4 Das Mikrocontrollerboard
Nun besitzt du dein erstes eigenes Mikrocontrollerboard und damit du es auch noch zu Hause
verwenden kannst, werden hier die wichtigsten Informationen über das Board und die Software
beschrieben.
13.4.1 Die Hardware
15
2
14
6
12
7
13
4
3
9
21
19
10
5
1
11
22
8
18
16
20
17
1. MSP430F1611 Der Mikrocontroller steuert die verschiedenen Peripherien des Boardes an
und ist somit der wichtigste Bestandteil, man könnte sagen, das Herz der Platine.
2. USB-Schnittstelle Über die USB-Schnittstelle werden die Programme herunter geladen,
ausserdem kann das Board via USB gespeist werden.
3. Batterieanschluss Es besteht die Möglichkeit das Board mit Hilfe einer 9V-Batterie zu
speisen.
4. Wahl der Speisung Diesen Jumper setzt man, um die gewünschte Speisungsart (USB oder
Batterie) zu wählen.
5. JTAG-Schnittstelle Diese Stiftleiste ist eine andere Art von Programmier-Schnittstelle, die
einen speziellen Adapter benötigt. Sie erledigt im Grunde dieselbe Arbeit, wie die USBSchnittstelle, einfach wesentlich schneller. Da neuere Computer oft nicht mehr über den
nötigen Parallelport verfügen, ist es wohl eher selten, dass diese Schnittstelle zu Hause
verwendet werden kann.
78
HSR Hochschule für Technik Rapperswil
6. Jumper TCK Will man das Programm nun doch über die JTAG-Schnittstelle laden, ist es
wichtig, den Jumper U8 zu unterbrechen.
7. Jumper UART/PROG Dieser Jumper bestimmt die Funktion der USB-Schnittstelle. Um
die Schnittstelle für die Programmierung des Mikrocontrollers zu aktivieren, muss der
Jumper auf die Stellung “PROG” gesetzt werden. Die Stellung “UART” bedeutet, dass
die Schnittstelle für die Datenkommunikation mit dem PC benutzt werden kann.
8. Schnittstelle UART0 und freie Pins Auf dieser Stiftleiste sind sowohl die zweite UART
Schnittstelle wie auch freie Pins heraus geführt. Weitere Peripherien können bei Bedarf
hier angeschlossen werden.
9. Reset-Taste Dieser Taster ist dazu gedacht, ein Programm neu zu starten. Durch drücken
des Tasters, wird der Mikroprozessor zurück gesetzt, das geladene Programm wird somit
neu gestartet.
10. Speisungsbuchsen Diese Buchsenleiste dient dazu, die vorhandene Speisung (3.3V/GND)
zu messen bzw. etwas damit zu speisen.
11. Temperatur- und Feuchtigkeitssensor Mit diesem digitalen Sensor kann die Temperatur
und die Luftfeuchtigkeit gemessen werden. Er ist am I2 C-Bus angeschlossen.
12. Tx-LED Diese LED leuchtet, wenn der Mikroprozessor Daten an den Computer sendet.
13. Rx-LED Diese LED leuchtet, wenn der Mikroprozessor Daten vom Computer empfängt.
14. SD-Card Slot Hier kann eine microSD-Card eingesetzt werden um Daten abzuspeichern.
Es werden nur Karten mit max. 2 GB unterstützt.
15. Ausgabe-LEDs Diese acht LEDs sind mit dem Port 4 des MSP430 verbunden. Programmiert man eine 1 an einen der Ausgänge von Port 4, leuchtet die entsprechende LED.
16. Eingabeschalter Diese acht Schalter können über die kleinen Tasten ein- und ausgeschaltet
und dessen Zustände über den Port 1 des MSP430 einzeln eingelesen werden.
17. Potentiometer Das Potentiometer ist ein verstellbarer Widerstand, der die Speisespannung (3 V) entsprechend aufteilen kann. Diese eingestellte Spannung wird mit dem Analogeingang A3 des Analog/Digital-Wandlers gemessen und digitalisiert.
18. Temperatursensor Dieser Sensor misst die Temperatur und gibt eine entsprechende Spannung an den Analogeingang A2 weiter, wo die Spannung gemessen werden kann.
19. Display Das Display besitzt zwei Zeilen mit je 16 Zeichen. Man kann es beispielsweise dazu
verwenden, gewandelte Werte des Potentiometers anzuzeigen.
20. Taster Die beiden Taster sind mit dem Port 2 verbunden (P2.0 und P2.1). Man kann sie
einzeln einlesen oder damit Interrupts auslösen.
21. Audioeingang Diese Buchse dient als Line-In. Das Stereo-Musiksignal von z.B. einem
MP3-Player wird auf die Analogeingänge A0 bzw. A1 des Analog-Digital-Wandlers geführt.
Damit kann die Musik digitalisiert und später z.B. auf die SD-Karte gespeichert werden.
79
HSR Hochschule für Technik Rapperswil
22. Audioausgang Diese Buchse dient als Line-Out. Die Analogausgänge DAC0 und DAC1
des Digital-Analog-Wandlers sind über einen Vorverstärker mit dieser Buchse verbunden.
Damit kann ein digitales Audiosignal ausgegeben werden und z.B. mit einem Kopfhörer
gehört werden.
13.4.2 Die Programmierumgebung
Unsere Programmierumgebung besteht aus drei Teilen: einem Texteditor, einem Compiler
(Übersetzer) und einem Downloader. Den Texteditor benötigen wir, um unsere Programme
zu schreiben. Sobald das Programm als Quelltext geschrieben ist, benötigen wir den Compiler, um den Quelltext in binären Code zu übersetzen. Die Übersetzung ist wichtig, weil der
Mikrocontroller nur binären Code versteht und keinen Quelltext. Schliesslich muss der binäre
Code in den Mikrocontroller geladen werden. Dazu ist der Downloader nötig. Der Downloader kommuniziert über das USB-Kabel mit dem Mikrocontroller und überträgt so das neue
Programm.
Installation des USB-Treibers
Damit du zu Hause das Mikrocontrollerboard am PC betreiben und programmieren kannst,
musst du zuerst den USB-Treiber installieren. Diesen findest du auf unserer Webseite als Datei
ftdi usb treiber.exe. Führe zuerst die Installation dieses Treibers durch und schliesse dann
das Board an den PC an.
Installation des Texteditors
Den Installer des Texteditors SciTE findest du auf unsere Website als Datei scite setup.exe.
Starte den Installer und es erscheint ein Installationsfenster:
1. Klicke 2-mal auf Next.
2. Wähle einen geeigneten Speicherort (C:\Programme\Scintilla Text Editor ist OK) und
klicke auf Next.
3. Es wird gefragt, ob du den Ordner “Scintilla Text Editor” nennen willst, klicke auf Next.
4. Auswahl zu den Icons, alles so lassen und klicke auf Next.
5. Klicke auf Install.
6. Klicke auf Finish.
Der Text Editor ist jetzt installiert. Kopiere nun die Datei SciTEGlobal.properties aus
install software.zip, die auf unserer Website zu finden ist, in den Installationsordner von SciTE
(z.B. C:\Programme\Scintilla Text Editor ). Dieser Ordner enthält bereits eine gleichnamige
Datei. Überschreibe sie einfach mit der neuen.
Wenn du auf deinen Desktop schaust, wirst du feststellen, dass dort eine neue Verknüpfung
entstanden ist, welche “Scintilla Text Editor” heisst. Benutze diese Verknüpfung, um den Texteditor zu starten oder rechts-klick auf eine Quelltext-Datei und wähle Edit with SciTE, um
diese zu öffnen.
80
HSR Hochschule für Technik Rapperswil
Installation des MSPGCC
Die weiteren Tools, wie Compiler und Downloader sind im Softwarepaket MSPGCC enthalten.
Diese Software findest du wiederum auf unserer Webseite als Datei mspgcc-20081230.exe.
Starte diesen Installer und es erscheint ein Installationsfenster. Führe die folgenden Schritte
aus, um die Software zu installieren:
1.
2.
3.
4.
5.
6.
Klicke auf Next.
Klicke auf I Agree.
Klicke auf Next.
Wähle einen geeigneten Speicherort (C:\mspgcc ist eigentlich OK) und klicke auf Next.
Klicke auf Install.
Es erscheint ein schwarzes Fenster, drücke eine beliebige Taste und das Fenster verschwindet wieder.
7. Es erscheint wieder das normale Installationsfenster. Wähle die beiden Häkchen und klicke
auf Next.
8. Klicke auf Finish.
9. Es erscheint ein Textfile, welches du einfach schliessen kannst.
Nun ist der Compiler auf deinem Computer installiert. Das einzige, was du jetzt noch tun
musst, ist die beiden Dateien make.exe und rm.exe aus install software.zip in den MSPGCCOrdner (z.B. C:\mspgcc\bin) zu kopieren. Diese zwei Dateien werden benötigt, damit aus dem
Texteditor die Kommandos im Makefile aufgerufen werden können. Wichtig noch zu wissen ist,
dass du den Compiler und den Downloader nicht extra starten musst. Diese werden direkt aus
dem Texteditor gestartet und arbeiten im Hintergrund.
13.4.3 Dein erstes Programm
Nun bist du bereit, um dein erstes Programm zu schreiben. In dieser Anleitung steht, wie du am
besten vorgehst. Zuallererst solltest du auf deinem PC einen neuen Ordner erstellen, in dem du
alle deine Programme abspeicherst. Der Ordnername könnte z.B. Meine Programme heissen.
Wenn du nun ein neues Programm schreibst, erstelle in deinem Ordner Meine Programme dafür
einen Unterordner und speichere die Daten dort hinein. So hast du immer eine gute Übersicht
und findest deine Programme sehr schnell wieder.
Wie du ein neues Programm für den Mikrocontroller erstellst, wird hier nun erklärt:
1. Erstelle im Ordner Meine Programme einen Unterordner mit dem Namen Schalter.
2. Kopiere in den Ordner Schalter die Datei makefile, sowie die beiden Dateien System.c und System.h. Diese drei Dateien findest du auf unserer Webseite in der Datei
uc programme xxxx.zip.
3. Starte den Texteditor SciTE und es erscheint eine weisse Schreibfläche mit dem Registernamen “untitled”.
4. Tippe den untenstehenden Quelltext in diese Schreibfläche ab.
81
HSR Hochschule für Technik Rapperswil
Listing 13.2: Schalter.c
1
# include " System . h "
2
3
4
5
6
7
8
9
10
int main ( void )
{
I n i t _ S y s t e m ();
while (1) {
P4OUT = P1IN ;
}
return 0;
}
5. Klicke nun im Menü auf File und dann auf Save as. . ., es erscheint ein Dialogfenster.
Wähle dort deinen Ordner Schalter aus, gib dem Programm den Namen Schalter.c und
klicke auf Save. (WICHTIG: Du musst immer ein “.c” beim Namen anfügen, ansonsten
funktioniert das Programm nicht!)
6. Klicke erneut im Menu auf File und wähle Open. . ., es erscheint ein Dialogfenster. Wähle
die Datei makefile an, die du vorhin im gleichen Ordner hinein kopiert hast und klicke
auf Open. Du hast nun zwei Registerkarten geöffnet, einmal dein Programm Schalter.c
und einmal das makefile.
7. Im nächsten Schritt geht es darum, das Makefile deinem Programm anzupassen. In der
Zeile: OBJECTS =
musst du nun deine Dateien einfügen. In diesem Falle sind es Schalter.c und System.c,
denn diese beiden Files benötigst du für dein Programm. Die Dateien fügt man folgendermassen ein:
OBJECTS = Schalter.o System.o
WICHTIG: Man schreibt “.o” und nicht “.c” im Makefile!
8. Die nächste Einstellung, welche du im Makefile vornehmen musst, ist die des COM-Ports.
Mache dafür einen Rechtsklick auf das Arbeitsplatz-Symbol auf dem Desktop. Wähle
Einstellungen, es erscheint das Einstellungsfenster. Klicke auf die Registerkarte Hardware und danach auf Geräte-Manager. Es erscheint ein neues Fenster mit diversen
Informationen über deinen PC. Klappe den Punkt Anschlüsse auf. Dort siehst du deine
verschiedenen Anschlüsse (Kommunikationsport etc.). Ein Port heisst USB Serial Port
und in Klammer steht “COM x”. Das “x” steht für eine Zahl, die ist von Computer zu
Computer verschieden. Es steht zum Beispiel die Zahl 10. Gehe nun zurück in den SciTE
zum Makefile. Dort gibt es die Zeile:
download-bsl: all
msp430-bsl -c N -e --invert-test --invert-reset $(NAME).elf
Anstelle des “N” kommt nun die UM 1 KLEINERE Zahl (N=x-1), als du im GeräteManager gelesen hast. Das heisst, wenn im Geräte-Manager “COM 10” stand, dann sieht
deine Zeile so aus:
download-bsl: all
msp430-bsl -c 9 -e --invert-test --invert-reset $(NAME).elf
Falls du nun ein neues Programm schreibst, kannst du dein neu eingestelltes Makefile
verwenden. Kopiere es einfach in den Ordner des neuen Programmes. Worauf du noch
achten musst, ist, in der Zeile “OBJECTS = ” die richtigen Dateinamen einzufügen.
82
HSR Hochschule für Technik Rapperswil
9. Nun hast du ein funktionstüchtiges Programm, welches nur noch darauf wartet heruntergeladen zu werden. Klicke dafür im Menü auf Tools. Es erscheint ein Register mit
verschiedenen Auswahlmöglichkeiten. Klicke dann auf Download. Der Compiler beginnt
nun zuerst mit der Übersetzung deines Programms. Falls dein Programm keine Schreibfehler enthält, wird der fertige Binärcode mit dem Downloader auf den Mikrocontroller
geladen. Falls du das Programm nur übersetzen willst ohne das Download, dann wähle
Build. Die Ausgabe des Compilers und des Downloaders erscheint in der rechten Hälfte
des Fensters. Somit siehst du immer was gerade geschieht. Wenn der Download fehlerfrei
abgeschlossen ist, sollten auf der rechten Seite ungefähr diese Zeilen stehen:
------------------------------------------------------MSP430 Bootstrap Loader Version: 2.0
Mass Erase...
Transmit default password ...
Invoking BSL...
Transmit default password ...
Current bootstrap loader version: 1.61 (Device ID: f16c)
Program ...
4734 bytes programmed.
Verify ...
>Exit code: 0 Time: 16.504
------------------------------------------------------10. Nun kannst du das Programm testen und schauen, ob es auch funktioniert. Kippe einen
Schalter und schaue, ob die dazugehörige LED leuchtet.
Viel Spass beim Programmieren!
Menge
5
1
13
5
2
4
4
1
1
9
1
1∗
3∗
1
1
∗
Name
Beschreibung
Wert/Typ
Lieferant
Art.Nr.
C1, C6, C17, C20, C23
C2
C3, C4, C5, C7, C14,
C15, C16, C18, C21, C22,
C28, C34, C35
C8, C9, C10, C12, C19
C11, C13
C24,C25,C26,C27
C29, C30, C31, C32
C33
D1
D2, D4, D5, D6, D7, D8,
D9, D10, D11
D3
J1∗
J2∗ , J3∗ , U8
U2, U7
U14
Tantal Elko
Keramikkondensator
Keramikkondensator
10uF
4.7uF
100nF
Distrelec
Farnell
Farnell
810983
1463404
1650885
Keramikkondensator
Tantal Elko
Keramikkondensator
Keramikkondensator
Keramikkondensator
LED grün
LED rot
1uF
100uF
1nF
12pF
10nF
LED
Farnell
Distrelec
Farnell
Farnell
Farnell
Distrelec
Distrelec
1650888
811025
1414709
1650892
1520307
254569
254571
BAV99
2x7pol
1x2pol
1x3pol
2Stk. 1x8pol
Distrelec
Distrelec
Distrelec
Distrelec
Distrelec
603652
122511
122350
122351
122382
Diodenarray
Stiftleiste
Stifleiste
Stifleiste
Stiftleiste
nicht bestücken
83
HSR Hochschule für Technik Rapperswil
1
1
1
1
2∗
1
2
10
1
1
2
3
1
1
1
1
1
2
1
1
1
1
1
1
1
1
J4
J5
J7
U9
U32∗
J6
R1, R2
R3, R4, R5, R6, R7, R8,
R9, R10, R37, R38
R11
R12, R29, R30, R31, R32,
R33, R34, R35, R36, R39,
R40
R13, R14, R15, R16, R17,
R18, R19, R20, R45, R46
R21,R22, R23, R24, R25,
R26, R27, R28
R41
R42
R43, R44
S1, S2, S3
S4
U3
U4
U6
U10
U11, U12
U13
U16
U19
U26
U28
U31
U33
1
1
1
1
3
4
8
Y1
Y2
-
4
-
1
11
10
8
Buchsenleiste
Buchsenleiste
Buchsenleiste
Buchsenleiste
Buchsenleiste
Mini USB B-Typ Buchse
Widerstand
Widerstand
2x5pol
1x10pol
1x8pol
1x6pol
1x36pol
USB
300R
20k
Distrelec
Distrelec
Distrelec
Distrelec
Distrelec
Farnell
Farnell
Farnell
121570
121550
120593
120592
122215
1243250
1653109
1469993
Widerstand
Widerstand
560R
100k
Farnell
Farnell
1653148
1469975
Widerstand
10k
Farnell
1469970
Widerstand
1k
Farnell
1469965
680R
47k
0R
Farnell
Farnell
Farnell
Farnell
Distrelec
Farnell
Distrelec
Farnell
Farnell
Distrelec
Farnell
Distrelec
Farnell
Distrelec
Distrelec
Farnell
Farnell
Sensirion
9240934
1470016
1469963
3801287
210334
9528172
645131
1146032
8456593
150419
1469223
740037
9664025
643332
682890
1558178
1470487
Distrelec
Distrelec
Distrelec
Distrelec
Distrelec
Farnell
Distrelec
644842
644082
661416
122215
121538
1466760
343610
Distrelec
340469
Widerstand
Widerstand
Widerstand
Taster
Piano Schalter
EMI Filter
3.3 V Spannungsregler
USB UART
Stereo Audioverstärker
Klinkenbuchse
Temperatursensor
Trimmpotentiometer
Analogschalter SPDT
Octal Bus Transceiver
MicroSD Card
MicroSD Card Sockel
Mikrocontroller
Feuchte- und Temperatursensor
Uhrenquarz
Quarz
Punktmatrix-LCD
Buchsenleiste für LCD
Kurzschlussstecker
Distanzhalter
Zylinderschrauben
Schlitz
Gummifüsse
8pol
NFE31P
BA033FP
FT232RL
TPA6111A2
3.5mm
LM20
10k
ISL84544IBZ
74HC245A
2GB
MSP430F1611
SHT21
32768Hz
8MHz
DEM16213SYH
1x16pol
M2.5x11mm
M2.5x4mm
Tabelle 13.2: Stückliste des Mikrocontrollerboards
84
HSR Hochschule für Technik Rapperswil
Abbildung 13.3: Bestückungsplan der Boardoberseite.
85
4
3
2
1
+
5
U2
GND
3
3
J6
1
2
3
4
5
C4
100nF
NFE31P
U1
Batterie
5V
1
C3
100nF
C2
4.7uF
1
Jumper_Speisung
2
10uF
2
C1
C28
100nF
Vcc_Bat
COM
Vcc_USB
-
2
U3
Spannungsregler_BA033FP
U4
3
1
Vout
Vin
3V3
VCC
D9
D+ 8
ID
7
GND 6
9
8
7
6
USB
5V
D
TXD
2
3V3
TCK_USB
1
TCK_MSP
U7
Jumper_RST
+ C6
2
1
2
3
Reset_JTAG
COM
Reset_USB
3V3
C5
6
5
4
U8
Loetbruecke_TCK
GND 3V3
GND 3V3
GND 3V3
1
2
3
7
11
C26
4
L2
5
K_LINKS
C11
7
+
R2
100uF
2
K_RECHTS
3
100uF
R9
6
20k
C13
1
GND
5
Audio_Output
VDD
Vo1
Vo2
IN1-
IN2-
BYPASS
SHUTDOWN
4
GND
L2
K_LINKS
1uF
1
R6
20k
C8
2
R7
20k
C12 1uF
K_RECHTS
3
3
R2
GND
13
1uF
5
C9
2
C10 1uF
20k R38
14
20k R37
R8
20k
R10
20k
20
18
GND
CBUS4
3V3OUT
CBUS2
USBDM
CBUS3
USBDP
5V
19
100nF
C7
17
16
15
FT232RL
1
Audio_Input
RESET#
CTS#
12
U11
1nF
U10 TPA6111A2
8
U12
R4
20k
2
3
R3
20k
R5
20k
VCC
DCD#
RXLED#
21
GND
DSR#
TXLED#
22
CBUS1
NC8
10
S1 Taster
4
1
23
CBUS0
GND
8
9
Buchsenliste_Speisung
3V3
10uF
100nF
24
NC24
RI#
D2
LED
25
AGND
RXD
D1
LED
26
TEST
VCCIO
6
27
OSCI
RTS#
4
5
3V3
U9
D
R2
300
28
OSCO
DTR#
3
+3.3V
+
C25
1nF
C24
1nF
4
3V3
C27 1nF
U13
4
C14
100nF
C15
5
100nF
Vcc
V0
GND
GND NC
3
2
1
R11
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
560
49
3V3
1
Temperatursensor_LM20
C
2
J2
J3
2
1
R44
0
47k
P_OUT
50
18
19
20
21
22
23
24
25
26
27
28
30
45
45
44
44
43
43
42
42
41
41
40
40
C23 +
C22
10uF
100nF
31
51
52
50
4
5
6
7
8
A
9
10
11
12
13
14
15
16
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
9
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
3
MSP430F1611
2
3
1
4
GND
GND
UTXD0
URXD0
3.3V
5V
P2.7
Haltepin4
14
12
13
Haltepin3
Haltepin2
7
11
Haltepin1
Card_Detect
6
9
10
8
RSV
COM
4
3
5
DIR Vcc
A1
/G
A2
B1
A3
B2
A4
B3
A5
B4
A6
B5
A7
B6
A8
B7
GND B8
20
19
18
17
16
15
14
13
12
11
LED
R21
R22
R23
R24
R25
R26
R27
R28
1k
1k
1k
1k
1k
1k
1k
1k
D4
LED
D5
LED
D6
LED
D7
LED
D8
LED_Treiber_MM74HC245A
LED
D9
1
2
3
4
5
6
7
8
D10
LED
48
D11
3V3
R46
10k
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
2
3
10
J7
P4_extern
3V3
U31
1
J4
Frei_Port
5V
49
4
53
54
4
55
56
11
LED
2
3
C31
12pF
57
P2.6
P2.5
7
Taster
S3
9
GND
1
6
Taster
S2
2
3
Y2
8MHz_CRYSTAL
1
C30 12pF
8
C32
12pF
58
12
U26
1
2
3
4
5
6
7
8
9
10
10
5
R40
100k
100nF
59
DB2
8
7
6
5
4
3
2
1
C34
60
DB3
DB1
30
B
3V3
61
DB4
DB0
13
3V3
R39
100k
62
DB5
E
C
19
14
32
Schalter_extern
63
R/W
20
R36 R35 R34 R33 R32 R31 R30 R29
100k 100k 100k 100k 100k 100k 100k 100k
J5
64
DB6
U28
Micro_SD_Card
C29 12pF
Y1
CRYSTAL
Data_OUT
34
33
Vcc
35
34
33
CLK
35
GND
36
Data_IN
37
2
38
36
Chip_Select
39
37
1
39
38
P3.4/UTXD0
P3.3/UCLK0
P3.2/SOMI0
29
DB7
RS
EW162B0YLY
U14
NC
52
49
51
P5.7
XT2OUT
P5.6/ACLK
P5.5/SMCLK
55
53
54
56
TCK
TMS
XT2IN
TDO/TDI
TDI/TCLK
57
/RST/NMI
62
59
58
P6.0/A0
P3.5/URXD0
17
Piano_Schalter
C33
10nF
10k
10k
10k
10k
10k
10k
10k
10k
P3.6/UTXD1
P1.4/SMCLK
P3.1/SIMO0
R13
R14
R15
R16
R17
R18
R19
R20
16
15
14
13
12
11
10
9
5
6
VLSS
V0
32
1
2
3
4
5
6
7
8
2
1
R42
P_IN
S4
P3.7/URXD1
P1.3/TA2
31
R43
0
1
3
5
7
9
11
13
P4.0/TB0
P1.2/TA1
30
B
2
4
6
8
10
12
14
P1.1/TA0
29
16
P4.1/TB1
P3.0/STE0
15
16
P4.2/TB2
P1.0/TACLK
P2.6/ADC12
14
15
P4.3/TB3
VREF-
P2.7/TA0
14
3V3
J1
JTAG
VeREF+
P2.5/Rosc
13
46
VLED
VDD
R45
10k
3V3
47
46
U33
45
1
44
43
2
42
41
3
40
39
38
SDA
SCL
VSS
VDD
NC3
NC4
6
3V3
5
C35
4
A
100nF
SHT21
37
36
35
34
33
Title
Mikroprozessorbord_iProg_V2.1
18
17
20
19
22
21
24
23
26
25
28
27
30
29
32
Size
B
31
Date:
5
4
3
2
Document Number
<Doc>
Wednesday, September 15, 2010
Rev
2.1b
Sheet
1
1
of
1
HSR Hochschule für Technik Rapperswil
12
13
P2.4/CA1
Analogschalter
10
11
12
27
11
8
7
6
5
28
V+
IN
N.C.6
N.C.5
P4.4/TB4
26
NO
COM
NC
GND
47
Vss
3V3
P4.5/TB5
MSP430F1611
XOUT
48
47
46
8
P4.6/TB6
XIN
48
7
P4.7/TBCLK
VREF+
25
10
3V3
U19
1
2
3
4
P6.7/A7
P2.3/CA0
9
P5.0/STE1
24
8
9
P6.6/A6
P2.2/CAOUT
7
8
P5.1/SIMO1
P2.1
6
7
P6.5/A5
23
6
28
P5.2/SOMI1
22
5
24
1uF
P5.4/MCLK
P5.3/UCLK1
P2.0/ACLK
5
4
C19
P6.4/A4
P1.7/TA2
4
23
C16 100nF
P6.3/A3
P1.6/TA1
4
3
DVcc
P1.5/TA0
3
20
2
3
19
C21
100nF
1
2
18
C20
10uF +
1
17
R12
100k
C18
100nF
21
C17
10uF +
P6.1/A1
64
63
61
AVss
AVcc
DVss
3V3
U16
10k
P6.2/A2
3V3
60
D3
BAV99
U32
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
323
86
Abbildung 13.4: Schema des Mikrocontrollerboards.
R1
300
U6
1
R41 680
5V
HSR Hochschule für Technik Rapperswil
14 Mee Controller
Der Mee Controller ist ein Gamecontroller, der eine ähnliche Funktionsweise wie jener der
bekannten Wii Konsole von Nintendo hat. Dabei werden die Steuerbefehle vom Beschleunigungssensor über ein 2.4 GHz Funkinterface an den Empfänger am Computer geschickt. Der
Computer selbst interpretiert die Befehle und steuert so das Game, welches auf dem Computer
läuft. Der Gamecontroller besteht aus zwei Teilen, dem Mee Controller, also dem Sender, und
dem Mee Receiver, dem Empfänger.
Der Name Mee ist ein zusammengesetztes Wort aus dem Begriff Wii und dem englischen
Pronomen me. Mee Controller steht also für “mein selbst gebauter Wii Controller“.
14.1 Mee Controller
Der Mee Controller ist die Bedieneinheit und wird benötigt um das Spiel zu steuern. Die Komponenten des Mee Controllers sind zwei Taster, ein Joystick und ein Beschleunigungssensor
welche als Eingangsperipherie dienen. Als Ausgangsperipherie dient eine LED. Das Herzstück
des Mee Controllers ist der Mikrocontroller CC2430, welcher auf der Struktur des 8051 Prozessors aufbaut und zusätzlich ein vollständig integriertes Funkinterface besitzt. Gespiesen wird
die Elektronik von einer AAA Batterie. Ein Step-up-Wandler generiert aus den 1.5 V eine Spannung von 3 V. Der benötigte Strom aus der Batterie beträgt ca. 5 mA. Daraus ergibt sich eine
Batterielebensdauer von 1000 mAh / 5 mA = 200 h.
14.1.1 Blockschaltbild Mee Controller
14.1.2 Beschleunigungssensor
Der Beschleunigungssensor misst die Beschleunigung der drei orthogonalen (rechtwinklig zu
einander) Achsen x, y und z. Mit Hilfe der trigoniometrischen Funktionen können die Beschleunigungswerte in Winkel umgerechnet und so das Spiel gesteuert werden. Um Strom zu sparen
werden die Umrechnungen nicht im Mikrocontroller sonder auf dem Computer durchgeführt.
87
HSR Hochschule für Technik Rapperswil
88
Name
Bezeichnung
Baugrösse
Lieferant, Art.Nr.
100k
43kΩ
56kΩ
56Ω
27kΩ
0R033
100n
220n
1nF
5p6
18p
4u7
100uF
22n
1n8
6n8
22uH
grün
SS12
CPU
LDO
0.9V
FMMT
32MHz
MMA7455
FSM
TSSJ30
1 Pol
0603
0603
0603
1206
0603
1206
0603
0603
0603
0402
0603
1206
Farnell, 9233628
Farnell, 1469809
Farnell, 9331360
Distrelec, 711277
Farnell, 9331980
Farnell, 1506138
Farnell, 8820023
Farnell, 3352020
Distrelec, 831448
Farnell, 7568088
Farnell, 1612182
Distrelec, 823523
Distrelec, 811025
Farnell, 1343085
Farnell, 1343061
Farnell, 1343077
Distrelec, 335178
Distrelec, 250241
Distrelec, 600692
Farnell, 1573878
Farnell, 1331482
Distrelec, 648775
Distrelec, 612915
MAAG, 12435618
Farnell, 605506
Distrelec, 201405
Distrelec, 201017
Distrelec, 202404
Distrelec, 972521
Distrelec, 972528
0402
0402
0402
3V
ZXSC 100
419A
AAA
AAA
HSR Hochschule für Technik Rapperswil
Tabelle 14.1: Stückliste Mee Controller
89
R1, R4, R8, R9, R10, R11, R12, R13, R14, R15 Widerstand
R2
Widerstand
R3
Widerstand
R7
Widerstand
R16
Widerstand
R17
Shuntwiderstand
C1, C4, C13, C15, C16
Keramikkondensator
C2, C3, C9, C10
Keramikkondensator
C5, C14
Keramikkondensator
C6
Keramikkondensator
C7, C8
Keramikkondensator
C11, C12
Keramikkondensator
C17, C18
Tantal Kondensator
L1
Spule
L2
Spule
L3
Spule
L4
Drossel
D2
LED
D3
Schottkydiode
U1
cc2430
U2
Spannungsregler
U3
Schaltregler
Q1
Transistor
Y1
Quarz
J2
Beschleunigungssensor
SW3, SW4
Printtaster
SW5
Joystick
SW6
Schalter
BAT1
Batteriehalter
BAT2
Batterie
Wert / Typ
HSR Hochschule für Technik Rapperswil
14.2 Mee Receiver
Der Mee Receiver hat die Aufgabe, die Daten, welche über das Funkinterface empfangen werden,
an den Computer weiterzuleiten. Der Mee Receiver wird direkt in die USB Schnittstelle des
Computers gesteckt und wird ähnlich betrieben wie ein USB Stick. Die zwei Hauptbestandteile
des Mee Receivers sind der Mikrocontroller CC2430 und der USB Treiber FTDI232. Zusätzlich
sind als Peripherie ein Taster sowie eine LED vorhanden.
14.2.1 Blockschaltbild Mee Receiver
Name
Bezeichnung
Wert / Typ
Baugrösse
Lieferant, Art.Nr.
R1, R4, R6
R2
R3
R5
C1, C4
C2, C3, C9, C10
C5
C6
C7, C8
C11, C13, C16
C12, C14, C17
C15
L1
L2
L3
D1
U1
U2
U3
Y1
CN1
SW1
Widerstand
Widerstand
Widerstand
Widerstand
Keramikkondensator
Keramikkondensator
Keramikkondensator
Keramikkondensator
Keramikkondensator
Keramikkondensator
Keramikkondensator
Keramikkondensator
Spule
Spule
Spule
LED
CC2430
Spannungsregler
USB-Treiber
Quarz
USB
Printtaster
100 kΩ
43k
56k
56R
100n
220n
1nF
5p6
18p
4u7
100n
10n
22n
1n8
6n8
grün
CPU
LDO
FT232RL
32 MHz
Connector
FSM
0805
0805
0603
0805
0603
0603
0603
0402
0603
1206
0805
0805
0402
0402
0402
0805
Farnell, 1469860
Farnell, 1469809
Farnell, 9331360
Distrelec, 713264
Farnell, 8820023
Farnell, 3352020
Distrelec, 831448
Farnell, 7568088
Farnell, 1612182
Distrelec, 823523
Farnell, 499687
Farnell, 499225
Farnell, 1343085
Farnell, 1343061
Farnell, 1343077
Distrelec, 250241
Farnell, 1573878
Farnell, 1331482
3V
TYP A
Tabelle 14.2: Stückliste Mee Receiver
90
MAAG, 12435618
Farnell, 1308875
Distrelec, 201405
HSR Hochschule für Technik Rapperswil
14.3 USB Interface
Wie kommen die Daten am PC an? Dieser Abschnitt gibt einen kurzen Überblick über den
Aufbau des Protokolls, welches für die Übertragung der Daten vom Mee Receiver zum PC
angewendet wird.
Das Protokoll ist Byte basiert. Zuerst wird das synchronisations Byte “0xaa“ sowie eine Controllernummer gesendet. Die Controllernummer wird für die Unterscheidung beim Betrieb mit
mehreren Mee Controllern benötigt. Anschliessend werden jeweils zwei Bytes pro Achse des Beschleunigungsmessers gesendet. Gefolgt von einem Byte mit Taster und Joystick Informationen
und einem reserve Byte. Zum Schluss kommen zwei parität Bytes.
Daraus ergibt sich eine Datenblocklänge von 12 Bytes. Diese werden mit 20 Hz gesendet, also
20 mal pro Sekunde.
Die Beschleunigungsdaten werden im 10-Bit Zweierkomplement Format bearbeitet. Wobei vom
High Byte nur zwei Bits (Bit 0 und Bit 1) verwendet werden.
Das Tas Byte beinhaltet die Daten der Taster sowie des Joysticks. Die Bits bedeuten folgendes:
Die Parity Bytes werden mit dem Fletcher Algorithmus wie folgt berechnet:
for(k=2; k<10; k++)
{
P_a += array[k];
P_b += P_a;
}
91
HSR Hochschule für Technik Rapperswil
92
HSR Hochschule für Technik Rapperswil
93
HSR Hochschule für Technik Rapperswil
94
HSR Hochschule für Technik Rapperswil
95
HSR Hochschule für Technik Rapperswil
96