Kapitel 0 Einführung in die Lineare Algebra und die mathematische
Werbung

Kapitel 0
Einführung in die Lineare
Algebra und die mathematische
Sprache
Zum Einstieg gehen wir dieser Ausgangsfrage nach:
Welche Lösungen hat das folgende lineare Gleichungssystem?
(∗)
2x1 +
−x1 +
x1
2x1 +
x2
x2 +
+
2x2 +
−2x2 −
6x3
3x3
9x3
3x3
−
−
+
−
+
3x4
2x4
2x4
3x4
7x4
= −1
= 3
= 6
= 8
= 4
Wir betrachten einige mögliche Antwortreaktionen auf diese Frage:
1. Antwortversuch: Das System hat mehr Gleichungen als Unbekannte, ist
”
daher überbestimmt und besitzt keine Lösung.“
Ist das korrekt?
Zwar werden wir nach einiger Zeit feststellen, daß ein solcher Begriff des
Überbestimmt-Seins“, der sich auf den Vergleich der Anzahlen der Glei”
chungen und der Unbekannten gründet, für die Frage nach Lösbarkeit bzw.
nach den Lösungen eines linearen Gleichungssystems vollständig untauglich
ist. Jedoch haben wir diese Einsichten hier noch nicht und lassen den 1. Antwortversuch zunächst in unentschieden-ratloser Offenheit stehen; allerdings
nicht lange: Betrachten wir einmal den
2. Antwortversuch: Durch x1 = 1, x2 = 0, x3 = 1, x4 = 1 ist eine Lösung
”
gegeben.“
1
Ist das korrekt?
In der Tat ist dies leicht zu überprüfen und als zutreffend einsehbar:
Beweis der Aussage: Es gilt
2·1 +
−1 +
1
2·1 +
0
0 +
+
2·0 +
−2 · 0 −
6·1
3·1
9·1
3·1
−
−
+
−
+
3·1
2·1
2·1
3·1
7·1
= −1
= 3
= 6
= 8
= 4
1
Der 2. Antwortversuch ist also eine wahre Aussage. Damit sieht man
aber unmittelbar, daß der oben noch offengelassene 1. Antwortversuch eine falsche Aussage ist: Wir haben gesehen, daß es eine Lösung des Gleichungssystems gibt, und daher ist die Behauptung falsch, daß es keine Lösung
besitze. Wir können damit auch festhalten:
Daß ein lineares Gleichungssystem mehr Gleichungen als Unbekannte hat,
bedeutet keineswegs, daß es unlösbar ist.
Wir betrachten noch weitere Reaktionen auf die Ausgangsfrage:
3. Antwortversuch: Durch x1 = − 34 , x2 = 53 , x3 = 0, x4 = 0 ist eine Lösung
”
gegeben.“
Ist das korrekt?
Zwar sind die ersten beiden Gleichungen des Gleichungssystems damit erfüllt,
die anderen drei jedoch nicht. Eine Lösung muß aber alle Gleichungen des
Gleichungssystems erfüllen. Also ist der 3. Antwortversuch eine falsche Aussage.
Wir führen eine Schreibweise für Lösungskandidaten“ des Gleichungssy”
stems ein. Prinzipiell liefert jede Liste von 4 Zahlen a1 , a2 , a3 , a4 einen
Kandidaten für eine Lösung: Man überprüft, ob nach Einsetzen von a1 für
x1 , a2 für x2 , a3 für x3 , a4 für x4 alle Gleichungen erfüllt sind. Die Reihenfolge, in der die Elemente ai dastehen, ist natürlich von großem Belang; denn
nur durch sie weiß man, welcher Wert für die jeweilige Unbekannte xj einzusetzen ist. Um eine Liste von Objekten (hier in unserem Beispiel: Zahlen)
anzugeben, deren Reihenfolge wichtig ist, benutzt man die sogenannte
Tupelschreibweise“: (a1 , a2 , a3 , a4 ) (im Falle von 4 Objekten in der Liste,
”
bei anderen Listenumfängen entsprechend).
1
Wir verwenden dieses Zeichen “ stets, um das Ende eines Beweises zu kennzeichnen.
”
Auf eine sehr lange Tradition kann statt dessen die zu diesem Zweck ebenfalls übliche
Abkürzung q.e.d.“ (für quod erat demonstrandum“, Lateinisch für was zu beweisen
”
”
”
war“) zurückblicken.
2
So ist etwa (1, 0, 1, 1) (s. 2. Antwortversuch) eine Lösung, dagegen (− 34 , 35 , 0, 0)
(s. 3. Antwortversuch) keine Lösung des linearen Gleichungssystems (∗).
Kann es außer (1, 0, 1, 1) weitere Lösungen geben? Unter Verwendung der
eben eingeführten Tupel-Schreibweise formulieren wir den
7
22
, 0) (anders geschrieben: ( 58 , −21
, 15
, 0)) ist
4. Antwortversuch: (1 35 , −4 15 , 1 15
5
”
eine Lösung“.
Einsetzen zeigt (prinzipiell wie beim Beweis der Aussage im 2. Antwortversuch, nur rechnerisch etwas unangenehmer), daß dies tatsächlich eine wahre
Aussage ist. D. h. das Gleichungssystem ist nicht nur lösbar, sondern hat
mindestens zwei verschiedene Lösungen!2
Der 2. und der 4. Antwortversuch enthalten damit zwar inhaltlich wahre Aussagen, beantworten die Ausgangsfrage aber jeweils beide nicht erschöpfend.
Natürlich ist darüber hinaus auch ganz und gar nicht sicher, ob es neben
den beiden angegebenen vielleicht nicht noch eine Vielzahl anderer gibt.3 Es
stellt sich so insgesamt das
Problem: Wie erhält man alle Lösungen des Gleichungssystems (∗) ?
Gesucht ist die Menge aller Lösungen. Die intuitive Vorstellung einer Menge
ist die einer Gesamtheit von Objekten“: Sozusagen durch einen Akt der
”
”
Zusammenfassung“ wird aus vorgegebenen Objekten ein neues Objekt geschaffen: die Menge, die sich aus den vorgegebenen Objekten konstituiert.
Die Beziehung zwischen einem von diesen, genannt x, und der vorerwähnten
Menge, genannt M, wird ausgedrückt durch die Schreibweise x ∈ M“, gele”
sen: x ist ein Element von M“. Man beachte, daß der Elementbegriff ein sog.
”
Relativbegriff ist, d. h. er ist nicht für sich allein, sondern nur mit Bezug auf
eine Menge sinnvoll. Es ist sinnlos, von einem Objekt auszusagen, es sei ein
”
Element“. Stets ist anzugeben, von welcher Menge das Objekt ein Element
ist. Zum Beispiel besteht die Menge der Lösungen unseres Gleichungssystems
aus Objekten, die wir in der Form (a1 , a2 , a3 , a4 ) schreiben, wobei die ai Zahlen sind. Nur, welche dieser Objekte tatsächlich Lösungen sind und welche
nicht, das ist gerade die Frage.
Beispiele
(1) Sei M die Menge unserer Ziffern. Die Elemente von M sind 0, 1, 2, 3, 4,
5, 6, 7, 8, 9.
2
Ein in Schulen häufig betrachteter Typus von linearen Gleichungssystemen ist stets
eindeutig lösbar, was aber nicht zu der sich möglicherweise unwillkürlich einstellenden
Fehlmeinung führen darf, daß dies generell so wäre. Das ist, wie unser Beispiel zeigt, ganz
und gar falsch.
3
Dies ist tatsächlich so, wie in der weiteren Folge erkannt werden wird.
3
(2) Sei M die Menge der (positiven) Teiler von 12. Die Elemente von M sind
1, 2, 3, 4, 6, 12.
(3) Sei M die Menge der ganzen Zahlen. (Die Standard-Bezeichnung für diese
Menge lautet: Z) Deren Elemente sind: . . . , −3, −2, −1, 0, 1, 2, . . .
Für diese Vorlesung gilt: Unter der Menge der natürlichen Zahlen verstehen
wir die Menge der Elemente 1, 2, 3, . . . (also die Menge der positiven ganzen
Zahlen). Die Standard-Bezeichnung für diese Menge in dieser Vorlesung lautet: N. 4
Ein weiterer wichtiger Zahlbereich ist der Bereich Q der rationalen Zahlen,
also der Zahlen, die sich als Bruch zweier ganzer Zahlen darstellen lassen.
Zur Angabe von Mengen bedarf es einer Schreibweise, aus der klar hervorgeht,
welche Objekte die Elemente der jeweils betrachteten Menge sind. Enthält
eine Menge M nur wenige Elemente a1 , . . . , ak , die man alle auflisten kann,
so kann man M in folgender Form angeben:
M = {a1 , . . . , ak }
Für die Angabe einer Menge ist die Verwendung der geschwungenen Klammern {“ , }“ das Erkennungsmerkmal. Z. B. gilt im Beispiel (1) : M =
”
”
{0, 1, 2, 3, 4, 5, 6, 7, 8, 9}, im Beispiel (2) : M = {1, 2, 3, 4, 6, 12}. Bei der Auflistung der Elemente von M innerhalb der geschweiften Klammern (auch
Mengenklammern“ genannt) ist die Reihenfolge unwichtig und ein mehr”
faches Vorkommen eines Elementes von M in der Liste ist für die Bedeutung von M ebenfalls unwichtig. Bei der zuvor betrachteten Art der
Auflistung, die durch die Tupel-Schreibweise (siehe S. 2) bezeichnet wird, ist
dies ganz und gar anders. Zur Verdeutlichung stellen wir die Unterschiede an
einem einfachen Beispiel heraus:
(1, 2, 3, 1) =
6
(1, 2, 1, 3) =
6
(1, 2, 3),
{1, 2, 3, 1} = {1, 2, 1, 3} = {1, 2, 3}.
Will man zum Ausdruck bringen, daß eine Menge M nicht mehr und nicht
weniger als n Elemente besitzt (wo n eine natürliche Zahl ist), so benutzt man
4
In einer anderen, ebenfalls weit verbreiteten Tradition wird N für die Menge der nichtnegativen ganzen Zahlen geschrieben, also im (einzigen) Unterschied zu unserer Setzung
auch 0 als natürliche Zahl, mithin als Element von N aufgefaßt. Dieser Tradition folgen
wir in dieser Vorlesung jedoch nicht. Für uns gilt: 0 6∈ N. – Man mag schon dieser Stelle
entnehmen, daß Mathematiker bezüglich der Wahl ihrer Bezeichnungen und Schreibweisen frei sind: Eine Bezeichnung bzw. eine Schreibweise kann nicht richtig oder falsch sein,
sondern nur zweckmäßig oder unzweckmäßig, sprechend oder nichtssagend, natürlich oder
irreführend!
4
dafür die Sprechweise: M hat genau n Elemente“. Ohne das Wort genau“
”
”
hingegen entsteht in mathematischen Kontexten ein veränderter Sinn: M
”
hat n Elemente“ bedeutet dasselbe wie: M hat mindestens n Elemente“; es
”
können also genau n Elemente oder auch mehr sein. In der Umgangssprache
ist eine so präzise Festlegung nicht gegeben. Um zu sagen, daß M entweder
genau n oder weniger als n Elemente hat, verwendet man, wie in der Umgangssprache gewohnt, die Sprechweise: M hat höchstens n Elemente“.
”
Nur für Mengen mit wenigen Elementen ist die bisher betrachte Schreibweise, die eine konkrete Auflistung der Elemente bedeutet, tatsächlich möglich.
Ganz und gar ausgeschlossen ist sie jedenfalls, wenn die betrachtete Menge unendlich viele Elemente enthält. Daher bedarf es einer umfassenderen
Möglichkeit der Mengenangabe. Man knüpft die Zugehörigkeit eines Objektes a zu einer Menge M (also die Entscheidung über die Frage, ob a ∈ M“
”
gilt) an das Erfülltsein einer sog. definierenden Eigenschaft. Sei zum Beispiel
G die Menge aller geraden (ganzen) Zahlen. Dann können wir G beschreiben
durch
G = {a|a ∈ Z und 2 teilt a},
gelesen: G ist die Menge aller Objekte a, für die gilt: a ist eine ganze Zahl,
”
und 2 teilt a.“ Die definierende Eigenschaft besteht in diesem Fall aus zwei
durch und“ verbundene Bedingungen. Ebenso für die Menge U aller unge”
raden Zahlen:
U = {a|a ∈ Z und 2 teilt nicht a}.
Allgemein hat diese Art der Mengenbeschreibung die Form
M = {a|E(a)},
wobei E eine aus Bedingungen an ein (variables) Objekt bestehende Eigenschaft ist. Ist diese bei vorliegendem Objekt a erfüllt (d. h. die Aussage E(a)
ist wahr), so ist a ein Element von M. Ist sie nicht erfüllt (d. h. die Aussage
E(a) ist falsch), so ist a kein Element von M. Z. B. wurde zur Beschreibung der Menge U als definierende Eigenschaft, die für ein Objekt a über die
Zugehörigkeit zu U entscheidet, verwendet:
a ∈ Z und 2 teilt nicht a
Dabei bezeichnet a die Variable,
für die man ein zu testendes Objekt einzu√
setzen hat. Etwa für a = 2 ist E(a) falsch, da bereits die erste Bedingung
(Element von Z zu sein) nicht erfüllt ist. Auch für a = 6 ist E(a) falsch, da
zwar die erste Bedingung, nicht aber die zweite erfüllt ist: Es ist nicht wahr,
daß 2 die Zahl a nicht teilt. Für a = 7 dagegen ist E(a) wahr, da 7 sowohl
5
Element von Z ist als auch nicht durch 2 geteilt werden kann.
Sei nun L die Menge der Lösungen des linearen Gleichungssystems (∗). Wir
schreiben die Elemente von L in der Tupelschreibweise (a1 , a2 , a3 , a4 ), wobei
die ai Zahlen sind; aber durch welche Eigenschaft E wird aus der Gesamtheit
aller dieser Objekte gerade die gewünschte Menge L ausgesondert? Wählen
wir für E die Eigenschaft, daß bei Einsetzen der ai für die xi alle 5 Gleichungen von (∗) erfüllt sein müssen, so ist natürlich nichts gewonnen. Gesucht ist
dagegen eine Eigenschaft, die so formuliert ist, daß ihre Überprüfung direkt,
d. h. ohne das Involvieren von (∗) leicht möglich ist.
Die Idee, die wir dazu verfolgen werden, besteht hierin: Statt des Systems
(∗) betrachten wir ein etwas einfacheres, verändertes lineares Gleichungssystem, das aber dieselbe Lösungsmenge hat. Ein solcher Schritt, der von (∗)
zu einem einfacheren Gleichungssystem führt, wird dann so lange erneut angewandt, bis man schließlich zu einem Gleichungssystem gelangt ist, dessen
Lösungsmenge man ohne Rechnung ablesen kann. Wenn man weiß, daß die
Lösungsmengen aller nach und nach betrachteten Gleichungssysteme dieselben sind, hat man damit (∗) gelöst. Wir geben ein Gleichungssystem (∗∗)
an, das aus (∗) durch einen ersten Vereinfachungsschritt der oben gemeinten
Art entstanden ist:
2x1 +
(∗∗)
x1
2x1
x2
x2 +
+
+
2x2 +
−2x2 −
− 3x4
9x3
3x3 + 2x4
9x3 − 3x4
3x3 + 7x4
= −1
= 9
= 6
= 8
= 4
Nur die zweite der 5 Gleichungen ist gegenüber (∗) verändert, und zwar ist
sie additiv aus den Gleichungen 2 und 3 aus (∗) entstanden: Die Summe der
Terme auf der linken Seite der Gleichungen sowie die der Zahlen 3 und 6
auf der rechten Seite wurde gebildet. Sei L′ die Lösungsmenge von (∗∗). Wie
zeigt man, daß L = L′ gilt?
Wieder gibt die Frage Anlaß zu einem Exkurs von fundamentaler Bedeutung,
in dem es um die allgemeine Frage geht, wie man überhaupt Gleichheiten
von Mengen beweisen kann. Seien M, M ′ beliebige Mengen. Da diese jeweils
durch die ihnen zugehörigen Elemente gegeben sind, besagt die Gleichheit
M = M ′ offenbar, daß M und M ′ genau dieselben Elemente enthalten. Dies
aber bedeutet zweierlei:
(i) Jedes Element von M ist auch ein Element von M ′ ,
(ii) Jedes Element von M ′ ist auch ein Element von M.
6
Für das alleinige Erfüllt-Sein der Bedingung (i) schreiben wir in dieser Vorlesung5 : M ⊆ M ′ , gelesen: M ist eine Teilmenge von M ′ (entsprechend für
(ii): M ′ ⊆ M). Als Beispiele führen wir an:
N ⊆ Z,
{−1, 1} ⊆ Z,
Z ⊆ Z, aber {−1, 1} 6⊆ N,
wobei das Zeichen 6⊆“ – wie bereits die Notation nahelegt – bedeuten soll:
”
ist nicht Teilmenge von“, (auch: ist keine Teilmenge von“).6 Unter Ver”
”
wendung unseres Symbols für die Teilmengenbeziehung erhalten wir also aus
dem zuvor Gesagten das
Gleichheitskriterium M = M ′ bedeutet: M ⊆ M ′ und M ′ ⊆ M.
Damit zerfällt grundsätzlich der Beweis einer Gleichheit zweier gegebener
Mengen M, M ′ stets in zwei Teile: 1) Man zeigt: M ⊆ M ′ , 2) Man zeigt:
M ′ ⊆ M.
Gilt M ⊆ M ′ , aber M 6= M ′ , so schreiben wir in dieser Vorlesung dafür :
M ⊂ M ′ (gelesen: M ist eine echte Teilmenge von M ′“). Zum Beispiel gelten
”
die Aussagen
N ⊂ Z,
{−1, 1} ⊂ Z, aber Z 6⊂ Z,
{−1, 1} 6⊂ N,
wobei natürlich wieder ⊂
6 “ zur Negation verwandt wird.
”
Man beachte: Für jede Menge M ist die Aussage M ⊆ M wahr. Daß die
naiv erwartete Aussage M = M auch wahr ist und manchem natürlicher“
”
erscheinen mag, widerspricht dem in keiner Weise: Zu den Teilmengen von M
gehört eben auch M selbst. Dagegen ist bei dem für diese Vorlesung gültigen
Gebrauch der eingeführten Zeichen für jede Menge M die Aussage M ⊂ M
falsch, da eine echte Teilmenge von M kraft Definition von M verschieden
sein muß.
Weiter ist bei der Aussage M 6⊂ M ′ zu beachten, daß das Nichterfülltsein
der echten Teilmengenbeziehung ⊂“ zwei wesentlich verschiedene Gründe
”
haben kann: Zum Beispiel gilt Z 6⊂ Z, weil Z (zwar eine Teilmenge von Z,
aber) nicht von Z verschieden ist. Dagegen gilt {−1, 1} 6⊂ N, weil {−1, 1}
(zwar von N verschieden, aber) keine Teilmenge von N ist.7
Einer anderen Tradition nach wird dafür statt dessen M ⊂ M ′“ geschrieben; dies hat
”
jedoch bei uns eine andere Bedeutung, wie oben in Kürze ausgeführt wird.
6
Die Aussage: M ⊆ M ′ ist nicht erfüllt“ nennt man die Negation der Aussage M ⊆
”
”
′
M . In der Logik nennt man allgemein die Aussage, daß eine gegebene Aussage A nicht
erfüllt ist, die Negation der Aussage A. Letztere wird in Zeichen ausgedrückt durch ¬A“.
”
7
Sind A, B Aussagen, so wird in der Logik die Aussage, die das gleichzeitige Erfülltsein
von A und B ausdrückt, in der Form A ∧ B (gelesen: A und B“) notiert. Die Negation
”
”
5
7
Klar zu unterscheiden sind die Bedeutungen von ∈“ ( ist ein Element von“)
”
”
und ⊆“ ( ist eine Teilmenge von“): Zum Beispiel gelten die Aussagen
”
”
3 ∈ N,
{2, 3, 4} ⊆ N,
{3} ⊆ N, aber {3} 6∈ N,
3 6⊆ N,
wobei wieder analog zu dem vorher Gesagten mit 6∈“ bzw. 6⊆“ das negiert
”
”
wird, was ∈“ bzw. ⊆“ an dieser Stelle zum Ausdruck bringen würde. Ele”
”
mente einer Menge M sind die Objekte selbst, aus deren Gesamtheit sich M
konstituiert. Teilmengen von M dagegen sind Mengen, die man durch Zusammenfassung, durch eine Auswahl gewisser Elemente von M erhält.
Wir kehren nun zu der Betrachtung der Lösungsmengen L (von (∗)), L′ (von
(∗∗)) zurück und wollen mit Hilfe unseres Gleichheitskriteriums die Gleichheit L = L′ einsehen. Danach gibt es zwei Inklusionen zu beweisen:
1. Teil. Wir zeigen: L ⊆ L′ .
Wir müssen nachweisen, daß jedes Element von L auch ein Element von L′
ist. Sei also ein beliebiges Element von L gegeben. Wir wissen, daß wir dies
prinzipiell in der Form (a1 , a2 , a3 , a4 ) (wobei die ai Zahlen sind) annehmen
dürfen. Zu zeigen ist, daß (a1 , a2 , a3 , a4 ) jetzt auch eine Lösung von (∗∗) ist.
Daß zunächst die 1., 3., 4. und 5. Gleichung von (∗∗) erfüllt ist, ist klar, weil
diese Gleichungen genauso im System (∗) vorkommen.
Zu zeigen bleibt: (A) a2 + 9a3 = 9.
Es gilt nach Voraussetzung (da ja (a1 , a2 , a3 , a4 ) Lösung von (∗) ist und folglich insbesondere die 2. und 3. Gleichung in (∗) erfüllen muß):
−a1 + a2 + 6a3 − 2a4
a1
+ 3a3 + 2a4
= 3
= 6
Daraus folgt: (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ) = 3 + 6 = 9.
Andererseits gilt: (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ) = a2 + 9a3 .
Aus beidem zusammen folgt: a2 + 9a3 = 9. Also gilt (A), und damit ist der
1. Teil beendet.
Zwar gibt das Aufgeschriebene genau wieder, jedoch ist der wiederholte Zeilenbeginn mit dem langen Term (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 )
¬(A ∧ B) bedeutet daher, daß (wenigstens) eine der beiden Aussagen A, B nicht erfüllt
ist; dabei kann es sein, daß sogar beide nicht erfüllt sind. Mit anderen Worten, ¬(A ∧ B)
bedeutet dasselbe wie ¬A oder ¬B“, wobei oder“ in dem Sinne benutzt wird, daß sich
”
”
die beiden Alternativen nicht gegenseitig ausschließen. Dafür verwendet man in der Logik
die Schreibweise ¬A ∨ ¬B.
8
etwas umständlich. Wir können den gemachten Schluß in einer einzigen Zeile
zusammenfassen durch
a2 + 9a3 = (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ) = 3 + 6 = 9.
Daß wir in Wahrheit, ausgehend von der Summe der beiden geklammerten Terme, einmal nach rechts“, einmal nach links“ gerechnet haben, ist
”
”
für die Korrektheit des angegebenen Schlusses unerheblich: Die angegebenen
Gleichheiten sind wahre Aussagen, und das ist das einzig Entscheidende. Es
ist dagegen nicht für die Korrektheit des Beweises relevant, ob erkennbar ist,
wie man auf die Gleichungen gekommen ist. Es muß nur im Kontext das
Erfülltsein der Gleichung (für den Leser zumutbar) zu verifizieren sein; dies
war oben offensichtlich der Fall.8
2. Teil. Wir zeigen: L′ ⊆ L.
Sei jetzt (a1 , a2 , a3 , a4 ) ∈ L′ .9 Es gilt nach Voraussetzung (da ja (a1 , a2 , a3 , a4 )
Lösung von (∗∗) ist und folglich insbesondere die 2. und 3. Gleichung in (∗∗)
erfüllen muß):
−a1 + a2 + 6a3 − 2a4 = (a2 + 9a3 ) − (a1 + 3a3 + 2a4 ) = 9 − 6 = 3.
Vor.
Es folgt: (a1 , a2 , a3 , a4 ) ∈ L.
Natürlich enthält der Beweis des 2. Teils ähnlich ausführliche Überlegungen
8
Dennoch sei auf einen Unterschied in der Verwendung der Gleichheitszeichen hingewiesen: Die Gleichungen
a2 + 9a3 = (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ), 3 + 6 = 9
sind Folgen unserer gewohnten Rechengesetze (mit Termen bzw. Zahlen). Dagegen ist bei
der Gleichung
(−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ) = 3 + 6
überhaupt nicht gerechnet worden, sondern es wurde schlicht verwandt, daß nach unserer
Voraussetzung (Lösungs-Eigenschaft von (a1 , a2 , a3 , a4 )!) der erste Term den Wert 3, der
zweite den Wert 6 hat. Um mitzuteilen, daß an dieser Stelle die Voraussetzung benutzt
wurde und nicht nur eine unmittelbar einleuchtende Term-Umformung, kann man den
Leser darauf hinweisen, etwa folgendermaßen:
a2 + 9a3 = (−a1 + a2 + 6a3 − 2a4 ) + (a1 + 3a3 + 2a4 ) = 3 + 6 = 9.
Vor.
9
Der 1. Teil ist abgeschlossen. Daß dort die Bedeutung von (a1 , a2 , a3 , a4 ) am Beweisausgangspunkt eine andere war – nämlich zu L zu gehören – hat nun, nach Beendigung
des 1. Teils, keine Bedeutung mehr. Die Variablen a1 , a2 , a3 , a4 stehen für den 2. Teil der
Beweisformulierung wieder neu“ zur Verfügung, wovon wir Gebrauch machen.
”
9
wie der des 1. Teils. Jedoch ist die komprimierte Form, wenn man sie in der
Denkweise des 1. Teils liest, als Beweis vollständig ausreichend. Mathematische Beweise sollten knapp, ohne unnötiges Beiwerk sein, damit der Kern des
Gedankens stets ohne Verhüllungen ersichtlich wird. Daher ist die Formulierung des 2. Teils vorzuziehen, auch wenn beim ersten Lesen die des 1. Teils
leichter verstehbar erscheinen sollte.
Der gerade durchgeführte Schluß hängt nicht von den konkreten Zahlen ab,
die in unseren Gleichungssystemen auftreten, und wird in seiner allgemeinen
Form zu einer wichtigen Regel bei der Behandlung beliebiger linearer Gleichungssysteme. Wir müssen nur mit Variablen das durchführen, was bei dem
beendeten Beweis mit Zahlen gerechnet wurde:
Proposition über die elementaren Gleichungssystem-Umformungen
Seien m, n ∈ N, und seien c11 , c12 ,. . . , c1n , c21 , c22 ,. . . , c2n ,. . . , cmn , b1 ,. . . ,bm
rationale Zahlen, 1 ≤ i < m. Sei L die Lösungsmenge des linearen Gleichungssystems
(∗)
c11 x1 + · · · +
c1n xn = b1
..
..
..
..
.
.
.
.
ci1 x1 + · · · +
cin xn = bi
ci+1,1 x1 + · · · + ci+1,n xn = bi+1
..
..
..
..
.
.
.
.
cm1 x1 + · · · +
cmn xn = bm
.
(1) Sei L′ die Lösungsmenge des linearen Gleichungssystems
(∗∗)
c11 x1 + · · · +
c1n xn =
b1
..
..
..
..
.
.
.
.
(ci1 + ci+1,1 )x1 + · · · + (cin + ci+1,n )xn = bi + bi+1
ci+1,1 x1 + · · · +
ci+1,n xn =
bi+1
..
..
..
..
.
.
.
.
cm1 x1 + · · · +
cmn xn =
bm
.
Dann gilt: L = L′ .
(2) Sei d eine rationale Zahl 6= 0 und L′′ die Lösungsmenge des linearen
Gleichungssystems
10
c11 x1 + · · · +
c1n xn = b1
..
..
..
..
.
.
.
.
dci1 x1 + · · · + dcin xn = dbi
ci+1,1 x1 + · · · + ci+1,n xn = bi+1
..
..
..
..
.
.
.
.
cm1 x1 + · · · +
cmn xn = bm
.
Dann gilt: L = L′′ .
(3) Sei L′′′ die Lösungsmenge eines linearen Gleichungssystems, das aus (∗)
durch Veränderung der Reihenfolge der Gleichungen entsteht. Dann gilt:
L = L′′′ .
Beweis. (1) 1. Teil: L ⊆ L′ : Sei (a1 , . . . , an ) ∈ L. Dann folgt:
ci1 a1 + · · · +
cin an = bi
ci+1,1 a1 + · · · + ci+1,n an = bi+1 ,
also auch
(ci1 + ci+1,1 )a1 + · · · + (cin + ci+1,n )an
= (ci1 a1 + · · · + cin an ) + (ci+1,1 a1 + · · · + ci+1,n an ) = bi + bi+1 .
Da alle außer der i-ten Gleichung in (∗) und (∗∗) dieselben sind, folgt:
(a1 , . . . , an ) ∈ L′ .
2. Teil: L′ ⊆ L: Sei (a1 , . . . , an ) ∈ L′ . Dann folgt:
(ci1 + ci+1,1 )a1 + · · · + (cin + ci+1,n )an = bi + bi+1
ci+1,1 a1 + · · · + ci+1,n an = bi+1 ,
also auch
ci1 a1 + · · · + cin an
= (ci1 + ci+1,1 )a1 + · · · + (cin + ci+1,n )an − (ci+1,1 a1 + · · · + ci+1,n an )
= (bi + bi+1 ) − bi+1 = bi .
Da alle außer der i-ten Gleichung in (∗∗) und (∗) dieselben sind, folgt:
(a1 , . . . , an ) ∈ L′ .
(2) 1. Teil: L ⊆ L′′ : Sei (a1 , . . . , an ) ∈ L. Dann folgt: ci1 a1 + · · · + cin an = bi ,
also auch dci1 a1 + · · · + dcin an = dbi . Da alle außer der i-ten Gleichung in
beiden Systemen dieselben sind, folgt: (a1 , . . . , an ) ∈ L′′ .
11
2. Teil: L′′ ⊆ L: Sei (a1 , . . . , an ) ∈ L′′ . Dann folgt: dci1 a1 + · · · + dcin an = dbi .
Da d 6= 0 gilt, können wir die Zahl d1 bilden und erhalten durch Multiplikation: ci1 a1 +· · ·+cin an = d1 (dci1 a1 +· · ·+dcin an ) = 1d ·dbi = bi . Da alle außer der
i-ten Gleichung in beiden Systemen dieselben sind, folgt: (a1 , . . . , an ) ∈ L.
(3) Trivial.
Es soll gleich gezeigt werden, wie man mit Hilfe der drei in der Proposition
bewiesenen Regeln das gegebene Gleichungssystem (∗) in ein sehr leicht überschaubares Gleichungssystem verwandeln kann, aus dem man die Lösungsmenge schnell ablesen kann. Zunächst wollen wir aber eine weitere Schreibweise einführen, mit der lineare Gleichungssysteme sparsamer“ erfaßt wer”
den können als in der durch (∗) gegebenen Darstellung. Alle Schritte, die die
Proposition durchzuführen erlaubt, verändern nur die Koeffizienten cij der
Unbekannten und die Werte bi auf der rechten Seite, während die Unbekannten xj stereotyp an denselben Stellen nur abgeschrieben werden, ebenso wie
die Gleichheitszeichen. Um das Gleichheitssystem zu erfassen, genügt es also,
die Werte cij und bi in folgendem rechteckigen Schema wiederzugeben:
c11 · · · c1n b1
..
..
..
.
.
.
cm1 · · · cmn bm
Dem Übergang von (∗) zu (∗∗) im konkreten Fall
entspricht in dieser Schreibweise die Umformung
2 1
2
1
0 −3 −1
0 1
−1 1
6
−2
3
1
0
3
2
6
→ 1 0
2 2
2
2
9 −3 8
0 −2
0 −2 −3 7
4
unseres Ausgangsbeispiels
0 −3 −1
9
0
9
3
2
6
9 −3 8
−3 7
4
Wir wissen dank Teil (3) der Proposition, daß das Ersetzen einer Zeile dieses
Schemas durch die Zeile aus den Summenwerten mit den jeweiligen Werten
der folgenden Zeile (gemäß Teil (1) der Proposition) auch bezüglich einer beliebigen anderen Zeile vorgenommen werden kann, ohne daß sich die Lösungsmenge dabei verändert. Multiplizieren wir gemäß Teil (2) der Proposition die
Werte der 3. Zeile mit −2 und addieren dann einerseits diese zu denen der
4. Zeile, andererseits auch zu denen der 1. Zeile, so erhalten wir:
0 1 −6 −7 −13
0 1
9
0
9
3
2
6
→
,
1 0
0 2
3 −7 −4
0 −2 −3 7
4
12
wobei wir die Multiplikation mit −2 (in der 3. Zeile) durch eine weitere
Anwendung des Teils (2), nämlich die nachträgliche Multiplikation mit − 12 ,
wieder rückgängig gemacht haben. Die bisherigen Anwendungen der Proposition haben dazu geführt, daß in der äußersten linken Spalte nunmehr
einmal der Wert 1 und ansonsten nur Nullen stehen. Ein solches Ziel verfolgen wir anschließend auch bezüglich der 2. Spalte. Bevor wir aber stereotyp
die analogen Rechnungen vornehmen, lassen wir uns eine auffällige Besonderheit nicht entgehen: Addiert man nämlich die Werte der ersten beiden Zeilen
(an den sich entsprechenden Stellen), so ergibt sich gerade die 4. Zeile, und
diese stimmt bis auf das Vorzeichen mit der 5. Zeile überein. Durch unsere
Proposition erlaubt diese Beobachtung die Umformungen
0
0
→
1
0
0
2
1
0
0
0
0 0 −15 −7 −22
3 −7 −4
0 1 9
0
9
9 0
9
2
6
3 2
6 → 1 0 3
0 0 0
0
0
0 0
0
0 0 0
0
0
0 0
0
7
7
0 0 1 15
1 15
1 0
1
0 1 0 −4 −4 1
0 1
5
5
3
3
0 0
1
0
0
1
→
→
5
5
0 0 0 0
0 0
0
0 0 0 0
0
0 0
3
3
1
0
5
5
0 −4 15 −4 51
7
7
1 15
1 15
.
0 0
0
0 0
0
D. h. unser anfangs gegebenes lineares Gleichungssystem ist lösungsgleich zu
dem linearen Gleichungssystem
x1
x2
x3
+ 53 x4
− 4 51 x4
7
+ 15
x4
= 1 53
= −4 15
7
= 1 15
x1
, d. h. x2
x3
= 1 53 − 35 x4
= −4 51 + 4 15 x4
7
7
− 15
x4
= 1 15
.
Dieses Gleichungssystem ist bei beliebigem Wert d für x4 erfüllbar; allerdings
sind die Werte für x1 , x2 , x3 mit der Wahl von d (für x4 ) eindeutig festgelegt:
Jede Lösung hat die Form
3 3
1
1
7
7
(1 − d, −4 + 4 d, 1 − d, d)
5 5
5
5
15 15
mit einer rationalen Zahl d, und jede Wahl von d führt auf die eben beschriebene Weise tatsächlich zu einer Lösung.
7
, 0), die
Die Wahl von d = 0 führt zu der speziellen Lösung (1 53 , −4 15 , 1 15
von d = 1 dagegen zu der speziellen Lösung (1, 0, 1, 1). Das sind genau
die beiden Lösungen aus dem 4. bzw. 2. Antwortversuch“ vom Beginn des
”
13
Kapitels, die sich somit als zwei singuläre Fälle einer unendlichen Menge
von Lösungen erweisen. Die gesamte Lösungsmenge haben wir inzwischen
vollständig beschrieben.
Wir wollen die Darstellung der Lösungen aber übersichtlicher gestalten als
bisher. Dazu werden uns folgende Setzungen von Nutzen sein, durch die wir
in der Lage sein werden, Objekte der Form (a1 , . . . , an ) allgemein zu addie”
ren“ bzw. auch mit rationalen Zahlen zu multiplizieren“:
”
Für alle Zahlen a1 , . . . , an , a′1 , . . . , a′n , d definieren wir:
(a1 , . . . , an ) + (a′1 , . . . , a′n ) := (a1 + a′1 , . . . , an + a′n ),
d · (a1 , . . . , an ) := (da1 , . . . , dan ).
Unter Benutzung dieser Festlegungen (im Falle n = 4) können wir unsere
allgemeine Lösung wie folgt umformen:
3 3
1
1
7
7
(1 − d, −4 + 4 d, 1 − d, d)
5 5
5
5
15 15
1
7
3 1
7
3
= (1 , −4 , 1 , 0) + d · (− , 4 , − , 1).
5
5 15
5 5
15
Sind a1 , a2 , a3 , a4 rationale Zahlen, so ist (a1 , a2 , a3 , a4 ) genau dann10 eine
Lösung des Gleichungssystems aus unserer Ausgangsfrage, wenn es ein d ∈ Q
gibt mit der Eigenschaft
3
1
7
3 1
7
(a1 , a2 , a3 , a4 ) = (1 , −4 , 1 , 0) + d · (− , 4 , − , 1).
5
5 15
5 5
15
Wir können damit unsere (unendliche) Lösungsmenge L in der auf S. 5 eingeführten Art beschreiben:
L = {(a1 , a2 , a3 , a4 )|a1 , a2 , a3 , a4 ∈ Q, und es gibt ein d ∈ Q mit
3
1
7
3 1
7
(a1 , a2 , a3 , a4 ) = (1 , −4 , 1 , 0) + d · (− , 4 , − , 1)}.
5
5 15
5 5
15
7
, 0) die
Alle Lösungen erhält man, indem man zu der Lösung (1 35 , −4 15 , 1 15
3
1
7
sämtlichen rationalen Vielfachen“ von (− 5 , 4 5 , − 15 , 1) addiert, im Sinne
”
der obigen Definition. Wir schreiben für die Menge aller dieser rationalen
”
7
Vielfachen“, also für die Menge der Elemente der Form d · (− 53 , 4 51 , − 15
, 1)
kurz
3 1
7
(− , 4 , − , 1) Q
5 5
15
10
d. h.: jedenfalls dann, aber auch in keinem anderen Fall!
14
und verwenden dies für die folgende abgekürzte Schreibweise für die Lösungsmenge L:
3 1
3
1
7
7
L = (1 , −4 , 1 , 0) + (− , 4 , − , 1) Q ,
5
5 15
5 5
15
wobei wir das Zeichen +, das eigentlich nur zwischen zwei Objekten des Typs
(a1 , . . . , an ) erklärt ist, in veränderter Form verwandt11 haben: zwischen einem Objekt des angegebenen Typs und einer ganzen Menge M von solchen
Objekten. Darunter soll die Menge aller Summen verstanden werden, die
man aus (a1 , . . . , an ) und einem der Elemente von M bilden kann.
7
, 1) Q einfacher schreiben in der
Wir können die Menge (− 53 , 4 51 , − 15
Form (−9, 63, −7, 15) Q , denn die Menge aller rationalen Vielfachen von
7
(− 53 , 4 51 , − 15
, 1) ist zugleich auch die Menge aller rationalen Vielfachen von
7
, 1).
15 · (− 35 , 4 51 , − 15
7
Während in der obigen Darstellung von L das Objekt (1 53 , −4 15 , 1 15
, 0) uns
schon (nämlich als eine spezielle Lösung
des gegebenen Gleichungssystems)
7
bekannt ist, besitzt bislang die Menge (− 35 , 4 15 , − 15
, 1) Q für uns noch
keine griffige Deutung bezüglich unseres Ausgangssystems. Wählen wir aber
7
ein rationales Vielfaches von (− 53 , 4 15 , − 15
, 1) für (x1 , x2 , x3 , x4 ) und setzen
in die linken Seiten der Gleichungen unseres Ausgangssystems ein, so ergeben
sich auf der rechten Seite nicht etwa die
stehenden Zahlen
−1, 3, 6, 8,
dort
3
1
7
4, sondern jedesmal 0. D. h. die Menge (− 5 , 4 5 , − 15 , 1) Q enthält12 lauter
Lösungen des veränderten Gleichungssystems
(∗)0
2x1 +
−x1 +
x1
2x1 +
x2
x2 +
+
2x2 +
−2x2 −
6x3
3x3
9x3
3x3
−
−
+
−
+
3x4
2x4
2x4
3x4
7x4
=
=
=
=
=
0
0
0
0
0
.
Dieses nennen wir das zu (∗) gehörige homogene lineare Gleichungssystem.
Allgemein legen wir fest:
Definition Sei (∗) wie in der Proposition gegeben. Gilt dann b1 = · · · =
bm = 0, so heißt das lineare Gleichungssystem (∗) homogen, andernfalls inhomogen. Zu jedem beliebigen linearen Gleichungssystem (∗) erhält man das
11
drastisch gesagt: mißbraucht“
”
In der Tat handelt es sich sogar um die genaue Lösungsmenge des homogenen Systems.
Das haben wir an dieser Stelle jedoch noch nicht bewiesen, sondern nur eine der dazu
einzusehenden Mengeninklusionen.
12
15
zugehörige homogene lineare Gleichungssystem (∗)0 , indem man in (∗) jeden
der Werte b1 , . . . , bm durch 0 ersetzt.
Die Lösungsmengen homogener linearer Gleichungssysteme haben interessante Eigenschaften, die man im Falle von inhomogenen linearen Gleichungssystemen nicht vorfindet: Sind nämlich (a1 , . . . , an ) und (a′1 , . . . , a′n ) beides
Lösungen eines homogenen linearen Gleichungssystems, so ergibt sich beim
Einsetzen der ai (für die jeweilige Unbekannte xi ) sowie auch beim Einsetzen der a′i auf der rechten Seite jeder Gleichung stets der Wert 0, also beim
Einsetzen von ai + a′i ebenfalls (da 0+0=0). Dasselbe ist bei gegebenem
rationalen Faktor d festzustellen, wenn man statt ai stets dai einsetzt (da
d · 0 = 0). Auch ist ein homogenes lineares Gleichungssystem stets lösbar, da
ja (0, . . . , 0) offensichtlich eine Lösung ist. (Man nennt sie die triviale Lösung
des Gleichungssystems.) Damit erhalten wir:
Bemerkung Sei L0 die Lösungsmenge eines homogenen linearen Gleichungssystems
(1) Gilt (a1 , . . . , an ) ∈ L0 und (a′1 , . . . , a′n ) ∈ L0 , so gilt auch
(a1 , . . . , an ) + (a′1 , . . . , a′n ) ∈ L0 .
(2) Gilt (a1 , . . . , an ) ∈ L0 , so gilt für alle d ∈ Q auch d · (a1 , . . . , an ) ∈ L0 .
(3) (0, . . . , 0) ∈ L0 .
Mit ähnlichen Überlegungen erhalten wir das folgende wichtige Hauptergebnis über den Zusammenhang zwischen der Lösungsmenge eines linearen
Gleichungssystems und der des zugehörigen homogenen linearen Gleichungssystems:
Satz Seien m, n ∈ N, und seien c11 , c12 ,. . . , c1n , c21 , c22 ,. . . , c2n ,. . . , cmn ,
b1 ,. . . ,bm rationale Zahlen. Sei L die Lösungsmenge des linearen Gleichungssystems
(∗)
c11 x1 + · · · + c1n xn = b1
..
..
..
..
.
.
.
.
cm1 x1 + · · · + cmn xn = bm
und L0 die Lösungsmenge des zugehörigen homogenen linearen Gleichungssystems. Ist (ã1 , . . . , ãn ) eine Lösung von (∗), so gilt die Gleichheit
L
=
(ã1 , . . . , ãn ) + L0 ,
d. h. man erhält jedes Element von L, indem man zu der speziellen Lösung
(ã1 , . . . , ãn ) jedes Element von L0 addiert.
16
Beweis. 1. Teil: Wir zeigen L ⊆ (ã1 , . . . , ãn ) + L0 :
Sei (a1 , . . . , an ) ∈ L. Dann ist sowohl (ã1 , . . . , ãn ) als auch (a1 , . . . , an ) eine
Lösung von (∗). Es folgt:
c11 (a1 − ã1 ) + · · · +
..
.
c1n (an − ãn ) =
..
.
b1 − b1
cm1 (a1 − ã1 ) + · · · + cmn (an − ãn ) = bm − bm
= 0
..
.
.
= 0
Setzen wir also (h1 , . . . , hn ) := (a1 , . . . , an )−(ã1 , . . . , ãn ) 13 , so gilt: (h1 , . . . , hn )
∈ L0 . Es folgt:
(a1 , . . . , an ) = (ã1 , . . . , ãn )+(h1 , . . . , hn ) ∈ (ã1 , . . . , ãn )+L0 .
2. Teil: Wir zeigen (ã1 , . . . , ãn ) + L0 ⊆ L:
Sei (a1 , . . . , an ) ∈ (ã1 , . . . , ãn )+L0 . Dann gibt es eine Lösung (h1 , . . . , hn ) des
zu (∗) gehörigen homogenen linearen Gleichungssystems mit der Eigenschaft
(a1 , . . . , an ) = (ã1 , . . . , ãn )+(h1 , . . . , hn ) = (ã1 + h1 , . . . , ãn + hn ).
Es folgt:
c11 a1 + · · · + c1n an = c11 (ã1 + h1 ) + · · · + c1n (ãn + hn ) = b1 + 0 = b1
..
..
,
.
.
cm1 a1 + · · · + cmn an = cm1 (ã1 + h1 ) + · · · + cmn (ãn + hn ) = bm + 0 = bm
also (a1 , . . . , an ) ∈ L.
Folgerung Ein lineares Gleichungssystem, das lösbar ist, hat eine eindeutig
bestimmte Lösung genau dann, wenn das zugehörige homogene lineare Gleichungssystem nur die triviale Lösung (0, . . . , 0) hat.
Ist nämlich (ã1 , . . . , ãn ) eine nach Voraussetzung gegebene Lösung, so ist diese nach dem Satz genau dann die einzige, wenn L0 nur das Element (0, . . . , 0)
enthält.
Man beachte, daß die Darstellung von L gemäß unserem Satz in der Form
(ã1 , . . . , ãn ) + L0 immer gilt, wenn nur (ã1 , . . . , ãn ) irgendeine Lösung von (∗)
ist. Daher können wir in der bisherigen Darstellung, die wir für die Lösungsmenge unseres Ausgangsbeispiels gewonnen haben, die spezielle Lösung
7
, 0) durch irgendeine andere ersetzen. Insbesondere gilt auch:14
(1 53 , −4 15 , 1 15
L = (1, 0, 1, 1) + (−9, 63, −7, 15) Q .
13
Natürlich soll das bedeuten: (a1 , . . . , an )+(−ã
1 , . . . , −ãn ) Daß die noch unbewiesene Inklusion L0 ⊆ (−9, 63, −7, 15) Q gilt, wenden wir hierbei
an. Wie sähe ein Beweis dafür aus?
14
17
Ein unlösbares lineares Gleichungssystem läßt sich auf einfachste Weise angeben, z. B. durch
x = 0
x = 1
Eine Menge, die (wie die Lösungsmenge in diesem Beispiel) kein Element
enthält, wird leer genannt. Zum Beispiel ist auch die Menge M := {z|z ∈ N
und z < 0} leer. Wir überlegen nun:
Bemerkung Ist X eine leere Menge, so gilt X ⊆ Y für jede Menge Y .
Beweis. Seien also X, Y Mengen, dabei X leer. Wäre die Aussage X ⊆ Y
falsch, so müßte es ein Element von X geben, das nicht in Y liegt. Da X leer
ist, enthält X aber überhaupt kein Element. Daher kann die Aussage X ⊆ Y
nicht falsch, also nur wahr sein, d. h. es gilt X ⊆ Y .
Erstmalig haben wir hier eine Aussage indirekt bewiesen: Statt eine Aussage
A in ihrer gegebenen Form ins Visier zu nehmen, zeigt man dabei, daß die
Negation von A, also die Aussage ¬A, falsch ist. Dann kann nämlich A nicht
ebenfalls falsch sein; und dies bedeutet, daß A wahr ist. Der Schluß beruht
auf dem Prinzip, daß es zu A ist wahr“ und A ist falsch“ keine (dritte)
”
”
Alternative gibt (tertium non datur).
Folgerung Je zwei leere Mengen sind gleich.
Beweis. Seien M, M ′ leere Mengen. Nach der Bemerkung (mit X := M,
Y := M ′ ) gilt M ⊆ M ′ . Eine zweite Anwendung der Bemerkung (nämlich
X := M ′ , Y := M) ergibt aber auch: M ′ ⊆ M. Es folgt: M = M ′ .
D. h. in welchem mathematischen Kontext auch immer sich irgendeine Menge als leer erweist, so ist sie damit stets ein eindeutig bestimmtes Objekt
der Mathematik: die leere Menge“. Dadurch ist auch gerechtfertigt, für sie
”
ein von dem jeweiligen Zusammenhang unabhängiges Symbol zu verwenden;
dafür ist das Zeichen ∅ üblich.15
Zwischen den bislang eingeführten Schreibweisen für Lösungen eines linearen Gleichungssystems (nämlich als Tupel) und der Matrizenschreibweise als
ein lineares Gleichungssystem eindeutig festlegendes Zahlenschema sind offenkundig natürliche Beziehungen vorhanden: Im Falle unseres Ausgangsbeispiels etwa,
15
In der Bemerkung und in der Folgerung geht es um die eindeutige Bestimmtheit, nicht
aber um die Existenz einer leeren Menge. Wie jedoch die vorgenannten Beispiele bereits
nahelegen, ist diese ein für die mathematische Begriffswelt unverzichtbares Postulat. Wir
betrachten in aller Folge die leere Menge als ein gegebenes grundlegendes Objekt der
Mathematik.
18
2x1 +
−x1 +
x1
2x1 +
x2
x2 +
+
2x2 +
−2x2 −
6x3
3x3
9x3
3x3
−
−
+
−
+
3x4
2x4
2x4
3x4
7x4
= −1
= 3
= 6
= 8
= 4
∼
2
1
0 −3 −1
−1 1
6 −2 3
0
3
2
6
C := 1
,
2
2
9 −3 8
0 −2 −3 7
4
entnehmen wir der Matrix in Form ihrer Zeilen“ fünf 5-Tupel:
”
C1 : = (2, 1, 0, −3, −1) heißt die erste Zeile von C,
C2 : = (−1, 1, 6, −2, 3) heißt die zweite Zeile von C,
..
.
Ebenso erhalten wir durch senkrechtes Lesen“
”
1
C : = (2, −1, 1, 2, 0) heißt die erste Spalte von C,
C 2 : = (1, 1, 0, 2, −2) heißt die zweite Spalte von C,
..
.
Daß die Matrix C in diesem Fall genauso viele Zeilen wie Spalten hat, ist eine
im allgemeinen nicht zu erwartende Besonderheit. Man nennt solche Matrizen
quadratisch. Unserer quadratischen Matrix C entnehmen wir durch schräges
”
Abwärtslesen“ noch ein weiteres in späteren Zusammenhängenden gelegentlich eine Rolle spielendes Tupel: (2, 1, 3, −3, 4), die sogenannte Hauptdiagonale
von C. Zunächst sind für uns die Zeilen einer Matrix am wichtigsten:
Sei ein beliebiges lineares Gleichungssystem (∗) mit den Bezeichnungen wie
in unserer Proposition gegeben. Da man jede Matrix durch Angabe ihrer
Zeilen beschreiben kann, geben wir in Kurzform auch die zu (∗) gehörige
Matrix
c11 · · · c1n b1
C1
..
.
.
..
.. wieder durch ...
C : = .
.
cm1 · · · cmn bm
Cm
Anläßlich der Angabe unserer Lösungsmengen hatten wir eine Addition“ +
”
von Tupeln (gleicher Länge) und eine Multiplikation“ · zwischen rationa”
len Zahlen und Tupeln kennengelernt. Nun werden wir feststellen, daß diese
19
Festlegungen bestens geeignet sind, die in der Proposition behandelten elementaren Umformungen eines linearen Gleichungssystems in Umformungen
der zugehörigen Matrix zu übertragen. Wir erhalten nämlich durch Anwendung unserer Proposition die Einsicht:
Für beliebige i, j ∈ {1, . . . , m} mit i 6= j gilt: Ersetzt man die i-te Zeile Ci
durch Ci +d · Cj (für irgendein d ∈ Q) und nennt die so entstehende Matrix
C ′ , so sind C, C ′ lösungsgleich.
Sind nämlich i, j ∈ {1, . . . , m} und etwa i < j (der Fall i > j verläuft
analog), so ist die Behauptung im Falle d = 0 trivial (da dann C = C ′ ),
und im Falle d 6= 0 gibt die folgende Kette wieder, wie man durch sukzessive Anwendungen der Proposition unter Lösungsgleichheit von C nach C ′
gelangt:
C1
C1
C1
C1
..
..
..
..
.
.
.
.
Ci
Ci
Ci +d · Cj
Ci +d · Cj
.
..
→ d · Cj → d · Cj →
→ C′
.
C→
.
.
(3) . (1)
(2)
(3)
..
d · C
..
d · C (2)
.
j
j
.
.
..
..
..
..
.
.
Cm
Cm
Cm
Cm
Ganz unmittelbar aus der Proposition erhält man, daß eine Zeile durch ihr dfaches ersetzt werden darf, sofern d eine rationale Zahl 6= 0 ist, und daß man
die Reihenfolge der Zeilen beliebig ändern darf, ohne daß sich die Lösungsmenge des zugehörigen Gleichungssystems ändert. Unter einer elementaren
Zeilenumformung einer Matrix C aus rationalen Zahlen verstehen wir eine
der folgenden Operationen:
(i) Ersetzen von Ci durch Ci +d · Cj (d ∈ Q, j 6= i),
(ii) Ersetzen von Cj durch d · Cj (d ∈ Q, d 6= 0 (!)),
(iii) Veränderung der Reihenfolge der Zeilen von C.
Vermöge der oben festgehaltenen Einsicht erhalten wir aus unserer Proposition über die elementaren Gleichungssystem-Umformungen daher:
Proposition von den elementaren Zeilenumformungen einer Matrix
Entsteht eine Matrix D aus einer Matrix C durch eine elementare Zeilenumformung, so sind C und D lösungsgleich.
Natürlich bleibt die Lösungsgleichheit erhalten, wenn man nun nacheinander solche elementaren Zeilenumformungen vornimmt. Wir tun jetzt genau
20
das, indem wir einen Algorithmus formulieren, durch den wir jede beliebige
Matrix rationaler Zahlen auf eine bestimmte Endgestalt bringen; dieser läßt
sich die Lösungsmenge dann ohne weiteres entnehmen:
Algorithmus durch elementare Zeilenumformungen
Ausgangssituation: Gegeben sei eine Matrix C aus rationalen Zahlen cij .
1. Falls C eine Nullmatrix16 ist, ist der Algorithmus hier beendet.
2. Andernfalls sei s die kleinste natürliche Zahl mit der Eigenschaft, daß
die Spalte C s ein Element 6= 0 enthält. Sei dann r die kleinste Zahl mit
der Eigenschaft crs 6= 0.
(a) Vermöge (ii) ersetzen wir Cr durch c1rs · Cr ; dadurch entsteht eine
Matrix mit einer 1 an der Stelle des früheren Elementes crs .
(b) Vermöge (i) mit j : =r können wir dann alle Zeilen mit Zeilenindizes > r durch Zeilen ersetzen, deren s-te Komponente 0 ist.
(c) Vermöge (iii) verschieben wir die r-te Zeile ganz nach oben und
erhalten dadurch eine Matrix D, bei der die ersten s Spalten nur
Nullen enthalten, mit Ausnahme des s-ten Elementes der ersten
Zeile; dieses ist 1.
3. Falls C nur eine Zeile enthält, ist der Algorithmus hier beendet.
4. Andernfalls sei C ′ die ( Rest“)-Matrix, die sich aus D durch Streichen
”
der 1. Zeile und der ersten s Spalten ergibt, und man fahre (innerhalb
der Matrix C) mit der Matrix C ′ gemäß 1. und 2. fort.
Da bei jeder Durchführung der Punkte 1. – 4. entweder der Algorithmus
terminiert oder sich die Zahl der Zeilen der weiter zu betrachtenden Matrix
um 1 reduziert, kann die Anzahl der algorithmischen Schritte (gezählt durch
den jeweils einleitenden Sprung zur Entscheidung 1.) nicht die Zahl der Zeilen
von C übersteigen.
Ist C keine Nullmatrix, so hat die aus
entstehende Matrix D die Gestalt:
0 ... 0 1
0 . . . 0 0
.
.. ..
..
. .
0 ... 0 0
16
C nach Durchlauf der Teile von 2.
· ... ·
· ...
..
. C′
· ...
·
,
..
.
·
Darunter verstehen wir eine Matrix, bei der sämtliche Elemente cij gleich 0 sind.
21
also nach Abschluß des gesamten Algorithmus:
0 ... 0 1 · ... · · · ...
0 0 ... 0 1 · ...
..
.
.. ..
..
..
.
.
. .
.
.
.
..
.. ..
... 0 0 ... 0 1 ·
O
0 0
.. ..
. .
0 ... ... 0 0 ...
0 0
...
0 0
*
... ·
. . . ·
..
.
..
.
. . . ·
. . . 0
..
.
... 0
Man sagt, daß eine Matrix dieser Art Zeilenstufenform hat: Eine Matrix A
mit m Zeilen und l Spalten hat Zeilenstufenform, wenn es eine nichtnegative
ganze Zahl k ≤ m und natürliche Zahlen j1 , j2 , . . . , jk ∈ {1, . . . , l} mit j1 <
j2 < · · · < jk gibt, so daß gilt:
Ai = (0, . . . , 0, 1, · · · ) für alle i ∈ {1, . . . , k},
| {z }
ji
Ak+1 = · · · = Am = (0, . . . , 0).
Im Falle k = m gibt es dann keine Nullzeilen in der Matrix. Im Falle jk = l ist
die k-te Zeile die letzte Zeile, die keine Nullzeile ist, und sieht folgendermaßen
aus:
Ak = (0, . . . , 0, 1) falls jk = l
In diesem Fall ist das zu A gehörige lineare Gleichungssystem unlösbar, da
seine letzte (nichttriviale) Gleichung offenbar unerfüllbar ist. In jedem anderen Fall ist das Gleichungssystem lösbar: Sind ai,k+1, . . . , ail die rationalen
Zahlen, für die gilt:
Ai = (0, . . . , 0, 1, ai,k+1, . . . , ail ),
n: = l − 1, bi : =ai,l für alle i ≤ m, so hat das zu A gehörige lineare Gleichungssystem dieselben Lösungen wie das System
xjk = bk − akn xn − · · · − ak,jk +1 xjk +1
..
.
xj1 = b1 − a1n xn − · · · − a1,j1 +1 xj1 +1
Hierin sind offensichtlich die Unbekannten xi mit i 6∈ {j1 , . . . , jk } beliebig
wählbar und die übrigen dann eindeutig bestimmt. Es gilt also:
Proposition über Gleichungssysteme von Zeilenstufenform Hat eine
Matrix A Zeilenstufenform, genau k Zeilen 6= (0, . . . , 0) und genau n + 1
22
Spalten, so ist das zugehörige lineare Gleichungssystem (in n Unbekannten)
entweder unlösbar oder es lassen sich genau n − k der Unbekannten frei
wählen.
Die Bestimmung der Lösungen vereinfacht sich noch, wenn man zuvor die
Zeilenstufenform vermöge Zeilenumformungen vom Typ (i) so verfeinert, daß
für jedes i ≤ k die ji -te Spalte statt der Werte a1,ji , . . . , ai−1,ji nur Nullen
enthält.
Bezüglich unseres Ausgangsbeispiels etwa sieht man, daß sich die zweite auf
S. 13 gegebene Matrix zwar in die Zeilenstufenform
1 0 3 2
6
0 1 9 0
9
0 0 1 − 7 − 22
15
15
0 0 0 0
0
0 0 0 0
0
bringen läßt, jedoch ist es geschickter, die verfeinerte Zeilenstufenform (siehe
die letzte auf S. 13 angegebene Matrix) anzustreben, bei der nicht nur unterhalb, sondern auch oberhalb der 1en in den ersten drei Spalten jeder Wert 0
ist.
Wir betrachten dazu noch ein abschließendes Beispiel: Die ZeilenstufenformMatrix
1 2 3 5 −1 −2 1 b1
0 0 0 1 −2 −3 −1 b2
0 0
1
2 b3
O
0
1 b4
bringen wir durch elementare Zeilenumformungen in folgende verfeinerte
Form:
1 2 3 0 9 0 0 b1 − 5b2 − 13b3 + 20b4
0 0 0 1 −2 0 0
b2 + 3b3 − 5b4
,
0 0 1 0
b3 − 2b4
O
0 1
b4
was dem linearen Gleichungssystem
x7
x6
x4
x1
=
=
=
=
b4
b3 − 2b4
b2 + 3b3 − 5b4 + 2x5
b1 − 5b2 − 13b3 + 20b4 − 9x5 − 3x3 − 2x2
23
entspricht. Jede Lösung hat also die Gestalt
(b1 − 5b2 − 13b3 + 20b4 − 9f − 3e − 2d, d, e, b2 + 3b3 − 5b4 + 2f, f, b3 − 2b4 , b4 )
mit geeigneten d, e, f ∈ Q, d. h. die Lösungsmenge ist
L = (b1 − 5b2 − 13b3 + 20b4 , 0, 0, b2 + 3b3 − 5b4 , 0, b3 − 2b4 , b4 )
+h(−2, 1, 0, 0, 0, 0, 0)iQ+h(−3, 0, 1, 0, 0, 0, 0)iQ+h(−9, 0, 0, 2, 1, 0, 0)iQ
Einige Elemente mathematischer
Ausdrucksweise
Wir stellen im folgenden einige Elemente mathematischer Ausdrucksweise
zusammen, zunächst einige Symbole aus dem Bereich der Logik. Seien A, B
Aussagen. Es bedeuten:
A∧B
:
A und B; sowohl A als auch B gilt.
A∨B
:
A oder B; wenigstens eine der Aussagen A, B gilt.
¬A
:
nicht A; A gilt nicht.
A⇒B
:
Aus A folgt B; wenn A, so B.
A⇔B
:
A ist gleichwertig (äquivalent) zu B; (A ⇒ B) ∧ (B ⇒ A).
∀...
(∗) :
Für alle . . . gilt (∗).
∃...
(∗) :
Es gibt ein . . . mit der Eigenschaft (∗).
Man beachte, daß bei der umgangssprachlichen Übertragung des Symbols
∀“ das Wort gilt“ bereits durch das Symbol mit ausgedrückt wird; ebenso
”
”
ist mit der Eigenschaft“ bereits durch das Symbol ∃“ mit erfaßt. Es handelt
”
”
sich also nicht um Abkürzungen für für alle“ bzw. es gibt“, auch wenn
”
”
man diese Art der Verwendung häufig antreffen kann. Tatsächlich sind die
Quantoren ∀“, ∃“ Bestandteile einer formalen Sprache, nämlich der der
”
”
Prädikatenlogik, in der für sie auch eine klare Grammatik“ festgelegt ist.
”
Will man sie nicht nur als willkommene Abkürzungen“, sondern in jenem
”
Sinne korrekt verwenden, so sollte man beachten:
• Die Zeichen ∀“, ∃“ leiten stets eine Aussage ein, stehen also stets am
”
”
Beginn, nie am Ende einer formalisierten Aussage.
24
• Auf die Zeichen ∀“, ∃“ muß zwingend eine freie Variable folgen, nie”
”
mals eine Konstante oder ein Term, der eine funktionale Abhängigkeit
ausdrückt.17
Wir stellen uns in der Folge auf den Standpunkt, daß in einer formalisierten
Zeile auch die Grammatik der Sprache, in der die Formalisierung vorgenommen wird, beachtet werden soll. D. h. wir halten es für einen guten Stil, in
Formelzeilen auf umgangssprachliche Elemente möglichst ganz zu verzichten
und zumindest die beiden genannten grammatikalischen Regeln“ für den
”
Gebrauch der All- und Existenzquantoren zu respektieren. Das schließt Formulierungen wie etwa x2 ≥ 0 ∀x ∈ Q“ oder ∃sin x ∈ R cos(sin x) = 12“
”
”
aus; nach dem zuvor Gesagten gilt dies auch z. B. für ∀x ∈ Q gilt x2 ≥ 0“,
”
∃x ∈ R mit cos(sin x) = 21“. (Unterstrichen ist jeweils der Stein des An”
”
stoßes“.) Dagegen erlauben wir uns in der Regel, bei den Variablen, die auf
ein Quantorensymbol folgen, in Form von Elementzugehörigkeit den Bereich
anzugeben, über den sich die Variable erstrecken darf. Bei einer quantorisierten Aussage trennen wir optisch den Quantorenteil (der den Beginn der
Aussage ausmacht) von der sogenannten Kernformel“ durch einen gewissen
”
Abstand, nicht jedoch durch ein umgangssprachliches Wort. Mit diesen stilistischen Abmachungen konform wären also z. B. die folgenden Fassungen des
inhaltlich in den kritisierten Formulierungen Gemeinten:
∀x ∈ Q
x2 ≥ 0 ,
∃x ∈ R
cos(sin x) =
1
2
.
Schon diese Beispiele zeigen aber, daß man den Inhalt auch dann u. U. verstehen kann, wenn man gegen die geschilderte Grammatik verstößt. So kommt
es, daß in anderen mathematischen Darstellungen durchaus eine abweichende
( lockerere“) stilistische Wahl getroffen werden kann, ohne daß die Korrekt”
heit des inhaltlich Mitgeteilten davon beeinträchtigt wird. Tatsache ist, daß
stilistisch gelockerte“ mathematische Texte sogar häufig anzutreffen sind.
”
Da wir jedoch keinen Vorteil darin sehen, uns über die aus der Logik bekannte Grammatik hinwegzusetzen, schließen wir uns solchen abweichenden
stilistischen Entscheidungen im Grundsatz nicht an.
Weiter stellen wir einige mengentheoretische Konzepte zusammen, die wenigstens zum Teil wohlbekannt sein dürften. Auch hier ist allerdings die Verwendung der Schreibweisen nicht ganz einheitlich. Für beliebige Mengen S,
T wird gesetzt:
17
Im Volkston: Nach einem Quantor hat ein nackter Buchstabe“ zu folgen wie x, A,
”
ϕ . . . – kein geschminkter“ wie etwa x−1 , A2 , ϕij . Ganz und gar dem Sinn eines
”
Quantors widersprechend ist eine Zusammenstellung wie ∃1 ∈ N“ oder ∃0 ∈ Z“.
”
”
25
S ∩ T := {x|x ∈ S ∧ x ∈ T } (Durchschnitt von S und T )
S ∪ T := {x|x ∈ S ∨ x ∈ T } (Vereinigung von S und T )
S r T := {x|x ∈ S ∧ x ∈
/ T } ( S ohne T“, Differenzmenge von T in S)
”
Zur Bildung der Differenzmenge von T in S braucht T keineswegs in S enthalten zu sein. Gilt aber T ⊆ S, so wird S r T auch das mengentheoretische
Komplement von T in S genannt. Unter der mengentheoretischen Differenz von
S und T versteht man die Menge
S△T := (S ∪ T ) r (S ∩ T ).
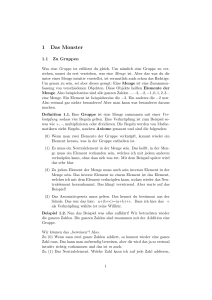
In der bekannten geometrischen Veranschaulichung der Mengen S, T :
S
T
SrT
S∩T
T rS
findet sich S ∪T als die gesamte umgrenzte Fläche, S△T dagegen als dieselbe
unter Aussparung des S und T gemeinsamen Teils S ∩ T repräsentiert. Die
mengentheoretische Differenz ist von den hier erwähnten Konzepten das von
der geringsten Relevanz. Jedoch sei ohne Beweis die folgende bemerkenswerte
nichttriviale Eigenschaft erwähnt: Für beliebige Mengen S, T , U gilt:
(S△T )△U = S△(T △U)
Eine ganz besonders wichtige Operation besteht in der Bildung der sogenannten Potenzmenge einer Menge M, definiert durch
P(M) := {T |T ⊆ M}.
Die Elemente von P(M) sind genau die Teilmengen von M. Zum Beispiel
gilt:
P({1, 2, 3}) = {1, 2, 3}, {1, 2}, {1, 3}, {2, 3}, {1}, {2}, {3}, ∅ .
26
Unsere Bemerkung auf S. 18 besagt: ∅ ∈ P(M) für jede Menge M. Insbesondere gilt – eben deswegen nämlich – P(M) 6= ∅ für jede Menge M. Wir
setzen
P′ (M) := P(M) r {∅}
für jede Menge M, d. h. P′ (M) ist die Menge der nichtleeren Teilmengen von
M. Im Falle M = ∅ gilt P′ (M) = ∅, in jedem anderen wegen ∅ =
6 M ∈ P(M)
′
jedenfalls M ∈ P (M).
Bemerkung 1 Für beliebige Mengen M, N gilt stets P(M) 6= P′ (N),
da die erste Menge ∅ als Element enthält, die zweite hingegen nicht. – Ein
wichtiges Konstruktionsprinzip interessanter mathematischer Objekte sieht
nun so aus, daß man zunächst zu einer vorgegebenen Menge M die Potenzmenge bildet und anschließend daraus eine gewisse Auswahl von Elementen
(also von Teilmengen von M) trifft, d. h. man bildet Mengen, deren Elemente gewisse Teilmengen von M sind. Betrachtet man eine Menge X, deren
Elemente gewisse zuvor gegebene Mengen T1 , T2 , . . . sind, so kann man sich
diesen Übergang als ein Betreten eines höher gelegenen Stockwerks“ vorstel”
len: Man denke sich die Elemente der Mengen T1 , T2 , . . . im Erdgeschoß eines
Gebäudes angesiedelt, über dem die umfassenden Mengen Ti im ersten Stock
thronen. Macht man nun die Mengen Ti zu Elementen einer neuen Menge X,
so gleicht dies dem Betreten eines 2. Stockwerks. Allgemein kann man nach
Erreichen eines gewissen höheren Stockwerks stets dort angesiedelte Mengen zu Elementen einer neuen Menge machen, die dann in diesem Bild im
nächsthöheren Stockwerk angesiedelt ist. Wie jedes Bild, so hat auch dieses
vom Hochhaus der Mengen“ seine Schwächen; es könnte aber bei einem er”
sten Zugang jedenfalls zu einer halbwegs anschaulichen und zur Orientierung
nützlichen Vorstellung verhelfen.
Zum Beispiel enthält die Menge Q unendlich viele Elemente (die Brüche).
Die im nächsthöheren Stockwerk gelegene“ Menge {Q} dagegen enthält ein
”
einziges Element: Q.
Sei nun M eine Menge, deren Elemente selbst Mengen sind.18 Wir setzen
dann:
[
M := {x|∃T ∈ M x ∈ T } (Vereinigung über M)
und im Falle M 6= ∅
\
M := {x|∀T ∈ M
x ∈ T } (Durchschnitt über M).
18
Dieser Relativsatz ist natürlich unnötig, da wir ja, sofern nicht anderes gesagt wird,
ohnehin nur Mengen als mathematische Objekte in Betracht ziehen. Er dient lediglich als
Hilfe für den, dem diese Sichtweise ungewohnt ist.
27
Im Falle M = ∅ ist die Bedingung ∀T ∈ M x ∈ T“ für jede Menge
x
S
”
erfüllt, ∃T ∈ M x ∈ T“ hingegen für keine Menge x. Daher gilt: ∅ = ∅,
”
während der Durchschnitt über ∅ (für die Vorstellung: der Durchschnitt über
ein System von Mengen, dem überhaupt keine Menge angehört) jede Menge
als Element enthalten müßte. An dieser Stelle gelangen wir an die Grenzen
unseres naiven Mengenkonzeptes: Die blauäugige“ Weise, mit der wir bislang
”
mit Mengen umgegangen sind, verschweigt nämlich einen wichtigen Punkt:
Man darf keineswegs auf beliebige Weise Mengen zu neuen Mengen zusammenfassen, wenn man sich nicht in Widersprüche verstricken will. Ohne auf
die hiermit verbundenen nichttrivialen Untersuchungen genauer einzugehen,
bemerken wir nur, daß es jedenfalls keine Menge gibt, die sämtliche Mengen
(also auch sich selbst!) als Elemente enthielte. Auf ein für solche Einsichten notwendiges rigoroses Studium axiomatischer Mengenlehre kann hier nur
verwiesen werden. Hierin liegt jedoch der Grund dafür, daß der Durchschnitt
über eine Menge M nur für nichtleeres M definiert ist.
Der Zusammenhang zum gewöhnlichen“ Durchschnitt bzw. zur gewöhnli”
”
chen“ Vereinigung zweier Mengen (siehe S. 26) ist klar, denn offensichtlich
gilt:
T
S
Bemerkung 2 Gilt M = {S, T }, so folgt: M = S ∩ T ,
M = S ∪ T. Im speziellen Fall S = T (in dem also M einelementig ist) ergibt dies:
T
S
Bemerkung 3 Für jede Menge S gilt: {S} = S = {S}.
Die Vereinigungsmenge aller Teilmengen einer Menge M ist offensichtlich M,
ebenso wie die Vereinigungsmenge aller nichtleeren Teilmengen von M:
S
S
Bemerkung 4 Für jede Menge M gilt:
P(M) = M = P′ (M).
28
Kapitel 1
Urpaare, Funktionen,
Relationen
1.1 Definition (Urpaar, Komponenten) Ein Urpaar ist eine 2-elementige
Menge p, für die gilt: Es gibt Mengen A, B mit P(A), P′ (B) ∈ p.
Nach Bemerkung 1 auf S. 27 hat dann p genau die Elemente P(A), P′ (B).
Dabei sind die Mengen A, B eindeutig bestimmt; es gilt:
1.1.1 Ist p = {P(A), P′ (B)} und sind C, D Mengen mit P(C), P′ (D) ∈ p,
so folgt A = C, B = D.
Beweis: Da P(A) das (einzige) Element von p ist, das ∅ als Element enthält,
und da auch ∅ ∈ P(C) gilt, folgt P(A) = P(C); aus der ersten der beiden
Gleichungen in Bemerkung 4 (S. 28) erhalten wir nun A = C. Mit der zweiten
Gleichung derselben Bemerkung folgt ebenso B = D.
Die eindeutig bestimmte Menge A mit P(A) ∈ p heißt die erste Komponente,
die eindeutig bestimmte Menge B mit P′ (B) ∈ p die zweite Komponente des
Urpaars p. Für das Urpaar mit der ersten Komponente A und der zweiten
Komponente B schreiben wir
(A; B).
Damit besagt 1.1.1:
1.1.1’ (A; B) = (C; D) ⇒ A = C ∧ B = D für alle Mengen A, B, C, D.
D. h. durch die rein mengentheoretische Konstruktion in Definition 1.1 entstand ein mathematisches Objekt, durch das Mengen A, B – die auch dieselben sein dürfen – unter Berücksichtigung ihrer Reihenfolge aufgeführt werden.
Ist p ein Urpaar, so schreiben wir p1 für die erste, p2 für die zweite Komponente von p, also: p = (p1 ; p2 ).
29
1.2 Definition (Vorbereich, Nachbereich, Funktion, Abbildung, Bild, Wertemenge, Identität, injektiv, surjektiv, bijektiv, Teilmengenfunktion, Umkehrung, vollständiges Urbild, disjunkt) Sei ϕ eine Menge von Urpaaren. Wir
nennen
V (ϕ) := {x|∃p ∈ ϕ x = p1 } den Vorbereich,
N(ϕ) := {y|∃p ∈ ϕ y = p2 } den Nachbereich
von ϕ.
1.2.1 Beispiel Sei ϕ0 := {(1; 1), (1; 2), (2; 3), (0; 4)}. Dann gilt: V (ϕ0 ) =
{0, 1, 2}, N(ϕ0 ) = {1, 2, 3, 4}.
ϕ heißt eine Funktion (oder Abbildung), wenn es zu jedem x ∈ V (ϕ) genau
ein y ∈ N(ϕ) gibt mit (x; y) ∈ ϕ. Ist dies der Fall, so benutzen wir auch die
Sprechweise ϕ ordnet dem Element x das Element y zu“, nennen y das Bild
”
von x unter ϕ und schreiben dafür:
y = xϕ
(Rechtsschreibweise für Abbildungen).
Andere gebräuchliche Schreibweisen sind die aus historischen Gründen weitest verbreitete Linksschreibweise ϕ(x) sowie die Exponentenschreibweise xϕ .
ϕ0 ist keine Funktion, da es zu dem Element 1 ∈ V (ϕ0 ) mehr als ein Element y ∈ N(ϕ0 ) gibt mit (1; y) ∈ ϕ0 , nämlich y = 1 und y = 2. Die zweite
Komponente ist also nicht eindeutig durch die erste Komponente bestimmt.
1.2.2 Beispiele ϕ1 := {(1; 1), (2; 3), (0; 4)} und ϕ2 := {(1; 3), (2; 3), (0; 4)}
sind Funktionen.
Ist ϕ eine Funktion, so heißt V (ϕ) der Definitionsbereich und N(ϕ) das Bild
(oder die Bildmenge) von ϕ. Jede Menge Y mit N(ϕ) ⊆ Y heißt eine Wertemenge für ϕ. Hat eine Funktion ϕ den Definitionsbereich X und ist Y
eine Wertemenge für ϕ, so heißt ϕ eine Abbildung von X nach (oder: in) Y .
Schreibweise dafür:
ϕ:X →Y
Ordnet ϕ dem Element x ∈ X das Element y ∈ Y zu, so schreiben wir:
ϕ : x 7→ y.
Häufig definiert man Abbildungen durch Angabe von Definitionsbereich,
Wertemenge und Elementzuordnung unter Verwendung beider Pfeil-Schreib”
weisen“, zum Beispiel:
ϕ:
Z → N0
x 7→ x2
30
Für jede Menge X verstehen wir unter der Identität auf X die Funktion
idX :
X → X
x 7→ x,
also: idX = {(x; x)|x ∈ X}.
Eine Funktion heißt injektiv, wenn für alle x, x′ ∈ V (ϕ) gilt:
x 6= x′ ⇒ xϕ 6= x′ ϕ
(bzw. als Kontraposition gleichwertig dazu : xϕ = x′ ϕ ⇒ x = x′ ). Von
unseren obigen Beispielen ist ϕ1 injektiv, ϕ2 nicht.
Seien nun X, Y vorgegebene Mengen und ϕ eine Abbildung von X nach Y . ϕ
heißt surjektiv, wenn die Menge der Bilder unter ϕ ganz Y ergibt, d. h. wenn
gilt:
∀y ∈ Y ∃x ∈ X xϕ = y.
Man beachte: Die Aussage ϕ ist surjektiv“ ist nur sinnvoll in bezug auf eine
”
zuvor gegebene Wertemenge Y . Dagegen ist die Injektivität von ϕ allein an
der Menge ϕ von Urpaaren zu entscheiden. Statt ϕ ist surjektiv“ sagt man
”
auch: ϕ ist eine Abbildung auf Y “. ϕ heißt eine Bijektion von X auf Y (als
”
Adjektiv: bijektiv), wenn ϕ injektiv und surjektiv ist. X heißt gleichmächtig
zu Y , wenn es eine Bijektion von X auf Y gibt.
1.2.3 Beispiele (
ϕ : N → N, k 7→ 2k ist injektiv, aber nicht surjektiv.
k − 1 falls k 6= 1
ist surjektiv, aber nicht injektiv.
ψ : N → N, k 7→
1
falls k = 1
(
−2k
falls k ≤ 0
ist bijektiv.
ω : Z → N0 , k 7→
2k − 1 falls k > 0
Für endliche Mengen X, Y bedeutet die Gleichmächtigkeit, daß X, Y gleich
viele Elemente besitzen.
Mit einer beliebigen Menge ϕ von Urpaaren sind auf natürliche Weise gewisse
andere Mengen von Urpaaren verbunden, die in manchen (auch unseren)
Kontexten eine Rolle spielen werden und daher hier eingeführt seien. Sei
X := V (ϕ), Y := N(ϕ). Ist T ⊆ V (ϕ), so setzen wir
ϕ|T := {p|p ∈ ϕ, p1 ∈ T }.
Ist ϕ eine Funktion, so offensichtlich auch ϕ|T . Sie hat den Definitionsbereich
T und heißt die Einschränkung (oder Restriktion) von ϕ auf T .
31
Sei nun wieder ϕ beliebig, X := V (ϕ), Y := N(ϕ). Wir setzen
xϕ+ := {y|y ∈ Y, (x; y) ∈ ϕ} für jedes x ∈ X
und
ϕ⊆ := {(S; T )|S ⊆ X, T ⊆ Y, T =
[
x∈S
xϕ+ }.
1.2.4 Ist ϕ eine Menge von Urpaaren, X := V (ϕ), Y := N(ϕ), so ist ϕ+
eine Funktion von X in P′ (Y ) und ϕ⊆ eine Funktion von P(X) in P(Y ). Wir nennen ϕ⊆ die zu ϕ gehörige Teilmengenfunktion. Für alle T ⊆ X gilt
T ϕ⊆ = {y|y ∈ Y, ∃x ∈ T
(x; y) ∈ ϕ},
insbesondere {x}ϕ⊆ = {xϕ} für alle x ∈ V (ϕ). Durch Vertauschung der
Komponentenreihenfolge bei den zu ϕ gehörigen Urpaaren erhalten wir
ϕ−1 := {(y; x)|(x; y) ∈ ϕ}
und nennen diese Menge von Urpaaren die Umkehrung von ϕ. Davon klar zu
unterscheiden ist die Menge von Urpaaren
ϕ− := (y; T )|y ∈ N(ϕ), T = {x|(x; y) ∈ ϕ}
(gelesen: ϕ-invers“). Im Gegensatz zu ϕ−1 ist ϕ− stets eine Funktion (und
”
zwar von Y in P′ (X)); dies ergibt sich durch Anwendung von 1.2.4 auf ϕ−1 ,
denn es gilt: ϕ− = (ϕ−1 )+ .
1.2.5
S − Ist ϕ eine Menge von Urpaaren, X := V (ϕ), Y := N(ϕ), so gilt:
yϕ = X.
y∈Y
Beweis: Die Inklusion ⊆“ ist klar.
S Zu− ”⊇“: Sei x ∈ X und z ∈ Y mit
”
−
(x; z) ∈ ϕ. Dann gilt: x ∈ zϕ ⊆
yϕ .
y∈Y
Ist ϕ eine Funktion, y ∈ N(ϕ), so nennt man yϕ− das vollständige Urbild von
y unter ϕ. 1
1.2.6 Ist ϕ eine Funktion, so gilt: ∀y, y ′ ∈ N(ϕ) y 6= y ′ ⇒ yϕ− ∩y ′ ϕ− = ∅.
Insbesondere ist die Funktion ϕ− dann injektiv.
Bisweilen erweitert man den Vorbereich von ϕ− auf eine beliebige Wertemenge W für
ϕ, indem man für alle y ∈ W r N (ϕ) setzt: yϕ− := ∅.
1
32
Beweis: Seien y, y ′ ∈ N(ϕ) und yϕ− ∩ y ′ ϕ− 6= ∅. (Zu zeigen ist: y = y ′) Sei
x ∈ yϕ− ∩ y ′ ϕ− . Dann folgt: y = xϕ = y ′ .
1.2.7 Beispiel Sei ϕ : Z → N0 , z 7→ z 2 . Dann ist N(ϕ) die Menge der
Quadratzahlen, und es gilt: 0ϕ− = {0}, 1ϕ− = {1, −1}, 4ϕ− = {2, −2},
9ϕ− = {3, −3},. . . .
Zwei Mengen A, B heißen disjunkt, wenn gilt: A ∩ B = ∅. Damit besagt
1.2.6: Je zwei verschiedene vollständige Urbilder unter einer Funktion ϕ sind
disjunkt. Daher nennt man die Vereinigung in 1.2.5 bei gegebener Funktion
ϕ auch eine disjunkte Vereinigung.
1.3 Definition (Partition, kanonische Projektion, charakteristische Funktion) Sei X eine Menge und M ⊆ P(X). M heißt eine Partition von X, wenn
gilt:
(o) ∅ ∈
/ M,
S
(i) M = X,
(ii) Je zwei verschiedene zu M gehörige Mengen sind disjunkt.
1.3.1 Beispiele (1) {Z r N0 , {0}, N} ist eine Partition von Z.
(2) Ist G die Menge der geraden, U die Menge der ungeraden ganzen Zahlen,
so ist {G, U} eine Partition von Z.
(3) Ist M eine endliche Menge, n die Anzahl ihrer Elemente, so sei für alle
k ∈ N0 gesetzt: Tk := {S|S ⊆ M, S enthält genau k Elemente}. Dann
ist {Tk |k ∈ n ∪ {0}} eine Partition von P(M).
Aus 1.2.4, 1.2.5 und 1.2.6 erhalten wir:
1.4 Proposition Ist ϕ eine Funktion, so ist die Menge der vollständigen
Urbilder der Elemente von N(ϕ) eine Partition von V (ϕ).
Für diese Partition der ϕ-Urbilder“ verwenden wir die Bezeichnung X/ϕ.
”
Nach Definition ist X/ϕ die Bildmenge der Abbildung ϕ− , und nach 1.2.6
ist ϕ− injektiv. Es folgt:
1.4.1 (Folgerung aus 1.4) Für jede Funktion ϕ mit dem Vorbereich X ist
ϕ− eine Bijektion von N(ϕ) auf die Partition X/ϕ.
33
Sei nun M eine beliebige Partition einer Menge X. Wir setzen
ϕM := {(x; T )|x ∈ X, T ∈ M ∧ x ∈ T }.
Da je zwei verschiedene Elemente von M disjunkt sind, gibt es zu jedem
x ∈ X höchstens ein T ∈ M mit x ∈ T . Da die Vereinigung über M ganz
X ergibt, gibt es zu jedem x ∈ X ein T ∈ M mit x ∈ T . Also ist ϕM eine
Funktion von X in M. Da jede Menge T ∈ M nach (o) nichtleer ist, also
ein Element x enthält, gilt (x; T ) ∈ ϕM , also ist das Bild der Funktion ϕM
gleich M:
1.4.2 Ist M eine Partition einer Menge X, so ist ϕM eine Abbildung von
X auf M.
Die Abbildung ϕM heißt die kanonische Projektion von X auf M.
Sei zum Beispiel M die Partition {G, U} aus 1.3.1(2). Dann gilt: U = 1ϕM =
(−1)ϕM = 3ϕM = (−3)ϕM = . . . , G = 0ϕM = 2ϕM = (−2)ϕM = 4ϕM =
(−4)ϕM = . . . .
Für jede Teilmenge T einer Menge X heißt
χT :
X → {0, 1}
(
1 falls x ∈ T
x 7→
0 falls x ∈
6 T
die charakteristische Funktion bezüglich der Teilmenge T von X. Für die Menge U in 1.3.1(2) erhalten wir zum Beispiel:
(
1 falls x ungerade
χU : Z → {0, 1}, x 7→
.
0 falls x gerade
Die Partition Z/χU ist die Menge {G, U}. Allgemein gilt für jede Teilmenge
T einer Menge X: X/χT = {T, X r T }.
1.5 Definition (Komposition) Seien ϕ, ψ Mengen von Urpaaren. Dann heißt
ϕψ := {(x; z)|x ∈ V (ϕ), z ∈ N(ψ), ∃y ∈ N(φ)∩V (ψ) (x; y) ∈ ϕ∧(y; z) ∈ ψ}
die Komposition von ϕ mit ψ. Der Definition entnimmt man unmittelbar die
folgenden beiden Bemerkungen:
1.5.1 V (ϕψ) = {x|x ∈ V (ϕ), ∃y ∈ V (ψ) (x; y) ∈ ϕ}
34
1.5.2 idV (ϕ) ⊆ ϕϕ−1 , idN (ϕ) ⊆ ϕ−1 ϕ.
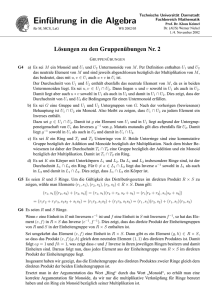
1.5.3 Sind ϕ, ψ Funktionen, so ist auch ϕψ eine Funktion, und für alle
x ∈ V (ϕψ) gilt: x(ϕψ) = (xϕ)ψ. Genau dann gilt V (ϕ) = V (ϕψ), wenn
N(ϕ) ⊆ V (ψ).
V (ϕ)
N (ϕ)
ϕ
x
V (ψ)
✲
N (ψ)
ψ
y
✲
z
Die Gleichung x(ϕψ) = (xϕ)ψ besagt, daß erst ϕ, dann ψ auszuführen ist“.
”
Deswegen nennt man ϕψ auch die Hintereinanderausführung von ϕ und ψ.2
Zum Beweis der Funktions-Eigenschaft von ϕψ sei x ∈ V (ϕψ), und seien z,
z ′ ∈ N(ψ) mit (x; z), (x; z ′ ) ∈ ϕψ. Dann gibt es y, y ′ ∈ N(ϕ) ∩ V (ψ) mit
(x; y) ∈ ϕ ∧ (y; z) ∈ ψ ∧ (x; y ′ ) ∈ ϕ ∧ (y ′; z ′ ) ∈ ψ. Da ϕ eine Funktion ist,
folgt y = y ′. Da ψ eine Funktion ist, folgt daraus z = z ′ .
Weiter zeigen wir: ∀x ∈ V (ϕψ) x(ϕψ) = (xϕ)ψ. Dazu sei x ∈ V (ϕψ),
y := xϕ, z := yψ. Es gilt: (xϕ)ψ = yψ = z und auch x ∈ V (ϕ), z ∈ N(ψ),
y ∈ N(ϕ) ∩ V (ψ), (x; y) ∈ ϕ ∧ (y; z) ∈ ψ, d. h. (x; z) ∈ ϕψ, also x(ϕψ) = z.
Die Inklusion V (ϕψ) ⊆ V (ϕ) ist klar. Daher gilt:
V (ϕ) = V (ϕψ) ⇔ ∀x ∈ V (ϕ) xϕ ∈ V (ψ) ⇔ N(ϕ) ⊆ V (ψ).
1.5.4 Sind ϕ, ψ, ω Funktionen, so gilt (ϕψ)ω = ϕ(ψω).
Denn für alle x ∈ V ((ϕψ)ω) gilt: x((ϕψ)ω) = (x(ϕψ))ω = ((xϕ)ψ)ω =
(xϕ)(ψω) = x(ϕ(ψω)) vermöge durchgehender Anwendungen von 1.5.3; desgleichen auch für alle x ∈ V (ϕ(ψω)): Man lese dieselbe Zeile von rechts nach
links. Insbesondere folgt: V ((ϕψ)ω) = V (ϕ(ψω)).
1.5.5 Seien X, Y , Z Mengen, ϕ : X → Y , ψ : Y → Z Abbildungen.
(1) Sind ϕ, ψ injektiv, so auch ϕψ.
(2) Sind ϕ, ψ surjektiv, so auch ϕψ.
(3) Sind ϕ, ψ bijektiv, so auch ϕψ.
2
Man beachte: Bei Verwendung der Links-Schreibweise für Abbildungen (siehe S. 30)
schreibt man dafür ψ ◦ ϕ, gelesen: ψ nach ϕ“. Durch den sprachlichen Trick der Verwen”
dung der Präposition nach wird die Ungunst neutralisiert, daß bei Links-Schreibweise die
später auszuführende Funktion leider als erste zu notieren ist. Es gilt also: ψ ◦ ϕ = ϕψ.
35
(4) Ist ϕψ injektiv, so ist ϕ injektiv.
(5) Ist ϕψ surjektiv, so ist ψ surjektiv.
Beweis. (1) Sind x, x′ ∈ X mit x(ϕψ) = x′ (ϕψ), so folgt aus 1.5.3: (xϕ)ψ =
(x′ ϕ)ψ, also xϕ = x′ ϕ aufgrund der Injektivität von ψ und daraus x = x′
aufgrund der Injektivität von ϕ.
(2) Sei z ∈ Z. Da ψ surjektiv ist, gibt es ein y ∈ Y mit yψ = z. Da ϕ surjekiv
ist, gibt es ein x ∈ X mit xϕ = y. Aus 1.5.3 folgt: x(ϕψ) = (xϕ)ψ = yψ = z.
(3) ist nach (1) und (2) klar.
(4) Seien x, x′ ∈ X mit xϕ = x′ ϕ. Dann folgt aus 1.5.3: x(ϕψ) = (xϕ)ψ =
(x′ ϕ)ψ = x′ (ϕψ), also x = x′ wegen der Injektivität von ϕψ.
(5) Sei z ∈ Z. Nach Voraussetzung gibt es dann ein x ∈ X mit x(ϕψ) = z.
Sei y := xϕ. Dann gilt: y ∈ Y ∧ yψ = (xϕ)ψ = x(ϕψ) = z.
1.6 Proposition (Kennzeichnung der Bijektionen) Seien X, Y Mengen, ϕ
eine Abbildung von X in Y . Es sind äquivalent:
(i) ϕ ist eine Bijektion von X auf Y ,
(ii) ϕϕ−1 = idX ∧ ϕ−1 ϕ = idY ,
(iii) ∃α, β ∈ X Y
ϕα = idX ∧ βϕ = idY
Zusatz Ist ϕ eine Bijektion und sind α, β wie in (iii), so folgt: α = ϕ−1 = β.
Wir nennen diese Funktion dann die Umkehrfunktion von ϕ. Wie (ii) lehrt,
ist 1.6(iii) auch für ϕ−1 anstelle von ϕ erfüllt (nämlich mit α := β := ϕ). Die
Implikation 1.6((iii)⇒(i)) ergibt nun, daß ϕ−1 eine Bijektion von Y auf X
ist. Ist X gleichmächtig zu Y , so ist also auch Y gleichmächtig zu X. Man
sagt in diesem Falle daher kurz: X, Y sind gleichmächtig.“
”
Beweis von 1.6. (i)⇒(ii) Da ϕ surjektiv ist, gilt N(ϕ) = Y . Dank 1.5.2 sind
daher nur noch die Inklusionen ϕϕ−1 ⊆ idX , ϕ−1 ϕ ⊆ idY einzusehen.
Seien x, x′ ∈ X mit (x; x′ ) ∈ ϕϕ−1 . Dann gibt es ein y ∈ Y mit (x; y) ∈ ϕ,
(y; x′ ) ∈ ϕ−1 . Es folgt: (x′ ; y) ∈ ϕ, also x = x′ wegen der Injektivität von ϕ.
Weiter seien y, y ′ ∈ Y mit (y; y ′) ∈ ϕ−1 ϕ. Dann gibt es ein x ∈ X mit
(y; x) ∈ ϕ−1 , (x; y ′) ∈ ϕ. Es folgt (x; y) ∈ ϕ und somit y = y ′ aufgrund der
Funktionseigenschaft von ϕ.
(ii)⇒(iii) Wir möchten α := β := ϕ−1 setzen und müssen nur noch einsehen,
daß die Umkehrung ϕ−1 von ϕ eine Funktion von Y nach X ist. Sind y ∈ Y
36
und x, x′ ∈ X mit (y; x), (y; x′) ∈ ϕ−1 , so folgt (x; y), (x′ ; y) ∈ ϕ, also x = x′
wegen der Injektivität von ϕ.
(iii)⇒(i) Da idX trivialerweise injektiv ist, folgt aus 1.5.5(4) die Injektivität
von ϕ. Da idY surjektiv ist, folgt aus 1.5.5(5) die Surjektivität von ϕ.
Beweis des Zusatzes: Seien α, β ∈ X Y mit ϕα = idX , βϕ = idY . Nach 1.6
und 1.5.4 gilt dann:
α = idY α = (ϕ−1 ϕ)α =ϕ−1 (ϕα) = ϕ−1 idX = ϕ−1 =
= idY ϕ−1 = (βϕ)ϕ−1 = β(ϕϕ−1 ) = β idX = β.
Wir kombinieren nun die beiden Bemerkungen 1.4.1 und 1.4.2: Sei ϕ eine
Abbildung einer Menge X in eine Menge Y , M := X/ϕ. Nach 1.4 ist dann
M eine Partition von X.
Nach 1.4.2 ist die kanonische Projektion ϕM : X → M surjektiv.
Nach 1.4.1 ist die Invers-Funktion ϕ− : N(ϕ) → M bijektiv.
Sei nun ϕ := (ϕ− ) −1 (die Umkehrfunktion von ϕ− gemäß 1.6, Zusatz). Dann
ist ϕ eine bijektive Abbildung M → N(ϕ), also insbesondere eine injektive
Abbildung M → Y .
Für alle x ∈ X gilt: (xϕM )ϕ = xϕ, denn (xϕ)ϕ −1 = (xϕ)ϕ− = xϕM , also
xϕ = ((xϕ)ϕ −1 )ϕ = (xϕM )ϕ, d. h. es gilt:
ϕM ϕ = ϕ.
X
...
...
Y
...
.......
..
ϕ
✲y
✸
...
ϕM
M := X/ϕ
N (ϕ)
ϕ
...
s•
yϕ−
Wir konkretisieren dieses Bild noch durch ein simples Beispiel, die Funktion
ϕ : Z → N0 , x 7→ x2 .
Der Bildbereich N(ϕ) ist dann die Menge der Quadratzahlen, die wir hier
mit Q bezeichnen. Bildgleich unter ϕ sind Elemente von Z genau dann, wenn
sie sich höchstens um das Vorzeichen unterscheiden, also z. B. 2 und −2:
37
Z
...
N0
3. −3.
ϕ
2
..
-2
...
·5
✲ ·4
✸
...
ϕM
M := Z/ϕ
...
•
·9
Q
ϕ
{3, −3}
s•
{2, −2}
Jede Funktion ϕ ist Hintereinanderausführung der surjektiven Abbildung
ϕM : X → M und der injektiven Abbildung ϕ : M → Y .
Damit erhalten wir als Folgerung aus den Bemerkungen 1.4.1 und 1.4.2:
1.7 Proposition (Homomorphiesatz für Mengen) Ist ϕ eine surjektive Abbildung einer Menge X auf eine Menge Y , so ist
{(T ; y)|T ∈ X/ϕ, ∀x ∈ T
xϕ = y}
eine Bijektion von X/ϕ auf Y . Insbesondere sind X/ϕ und Y gleichmächtig.
Denn {(y; T )|T ∈ X/ϕ, ∀x ∈ T xϕ = y} = ϕ− , folglich ist die in 1.7
angegebene Menge von Urpaaren gleich ϕ, also eine Bijektion von X/ϕ auf
N(ϕ) = Y .
Ist zum Beispiel P′fin (N) die Menge der nichtleeren endlichen Teilmengen von
N und
ϕ : P′fin (N) → N, T 7→ max T,
so ist ϕ eine surjektive Abbildung und nϕ− = {T |∃S ∈ P(n − 1) T =
S ∪ {n}} für alle n ∈ N, denn dies ist die Menge aller Teilmengen von N,
deren Maximum n ist. Es ist also die Partition von P′fin (N), die aus diesen
Mengen nϕ− (n ∈ N) besteht, gleichmächtig zu N. Da für jedes n ∈ N die
Menge nϕ− endlich3 ist, läßt sich darüber hinaus zeigen, daß damit sogar
P′fin (N) selbst zu N gleichmächtig ist. Zu N gleichmächtige Mengen heißen
abzählbar.4
1.8 Definition (Folge, Tupel, geordnetes Paar, Matrix) Seien X, Y Mengen. Für die Menge aller Abbildungen von X nach Y schreiben wir Y X .
Aus 1.8.4 erhalten wir die genaue Anzahl der Elemente: 2n−1 .
Es gibt Autoren, die auch endliche Mengen als abzählbar bezeichnen. In deren Sprachgebrauch werden die zu N gleichmächtigen Mengen zur Unterscheidung abzählbar unendlich
genannt.
3
4
38
Von besonderer Bedeutung sind Funktionen, deren Definitionsbereich eine
Teilmenge von Z ist: Unter einer allgemeinen Folge über Y verstehen wir eine Abbildung einer Teilmenge T von Z in Y , und wir verwenden dafür die
Schreibweise (yj )j∈T (wobei yj das Bild von j ∈ T in Y bezeichnet). Im wichtigen Fall T = N heißt (yj )j∈T eine (Standard-)Folge über Y .5
Ein anderer wichtiger Fall liegt vor, wenn T = n für ein n ∈ N gilt. Jede
Abbildung (yj )j∈n heißt ein n-Tupel über Y . Üblich ist dafür die Schreibweise (y1 , . . . , yn ) (wobei wieder yj das Bild von j ∈ n bezeichnet und die
j-te Komponente des n-Tupels heißt); sie ist uns schon bei der Bestimmung
der Lösungen linearer Gleichungssysteme begegnet. So ist etwa (−1, 0, 1) begrifflich nichts anderes als die Funktion {(1; −1), (2; 0), (3; 1)} (unter Verwendung von Pfeilen für die Element-Zuordnung geschrieben: 1 7→ −1, 2 7→ 0,
3 7→ 1). Es ist also
Y N die Menge aller (Standard-)Folgen über Y ,
Y n die Menge aller n-Tupel über Y .
Bei letzterem ist es üblich, den Haken“ wegzulassen, d. h. man schreibt Y n
”
statt Y n .
Ein besonders wichtiger Spezialfall ist durch n = 2 gegeben: Ein 2-Tupel
über Y heißt auch ein geordnetes Paar über Y .
Der Name erinnert nicht zufällig an die Urpaare. In der Tat haben auch die
geordneten Paare die zu 1.1.1’ analoge typische Paar-Eigenschaft“:
”
1.8.1 (a, b) = (c, d) ⇒ a = c ∧ b = d für alle Mengen a, b, c, d.
Gilt nämlich (a, b) = (c, d) und schreiben wir τ für das geordnete Paar (a, b)
(Y := {a, b}), so gilt nach Definition eines 2-Tupels: a = 1τ = c, b = 2τ = d.
Sind M, N Mengen, so setzen wir Y := M ∪ N und
M × N := {(a, b)|a ∈ M, b ∈ N} (⊆ Y 2 ).
Diese Menge heißt das cartesische Produkt6 von M mit N.
5
Dies ist ein vor allem für die Belange der Analysis fundamentaler Begriff. Ihm liegt
die Vorstellung zugrunde, daß gewisse Elemente von Y (die sich dabei allerdings auch
wiederholen dürfen) mit natürlichen Zahlen durchnumeriert“ werden: y1 , y2 , y3 , . . . . Ist
”
in einem mathematischen Kontext ohne weiteren Kommentar von einer Folge die Rede, so
kann man davon ausgehen, daß eine Standard-Folge im oben definierten Sinn oder aber
eine Abbildung mit dem Definitionsbereich N0 gemeint ist. Man nennt allgemeiner eine
Abbildung ϕ einer Menge I in Y bisweilen auch eine Indizierung durch die Indexmenge“
”
I. Das Urpaar (Y ; ϕ) heißt dann eine Familie. Man schreibt Familien in der Regel in der
Form (yi )i∈I , was die Anlehnung an den Folgenbegriff signalisiert.
6
nach René Descartes ( Cartesius“), 1596-1650
”
39
1.8.2 |M × N| = |M| · |N| falls M, N endliche Mengen sind.
Beweis durch Induktion nach |M|: Ist |M| = 0, so folgt M = ∅, also auch
M × N = ∅ und damit |M × N| = |∅| = 0 = 0 · |N| = |M| · |N|. Sei nun
|M| > 0, a ∈ M, M ′ := M r {a}, und es gelte |M ′ × N| = |M ′ | · |N|
(Induktions-Voraussetzung). Für jedes b ∈ N sei definiert: τb := (a, b). Dann
gilt für alle b ∈ N: τb 6∈ M ′ × N, und weiter M × N = (M ′ × N) ∪ {τb |b ∈ N},
also wegen der Disjunktheit dieser Vereinigung
|M × N| = |M ′ × N| + |{(a, b)|b ∈ N}| = |M ′ | · |N| + |N| = |M| · |N|.
Unter einer (M × N)-Matrix über einer Menge X verstehen wir eine Abbildung von M ×N in X. In dem wichtigen Fall M = m, N = n (m, n ∈ N) läßt
man wieder den Haken“ fort und schreibt: (m × n)-Matrix (statt (m × n)”
Matrix).7 Eine (m × n)-Matrix wird häufig in der Form (aij )(i,j)∈m×n bzw.
(aij ) i∈m geschrieben (wobei, analog zu dem Vorherigen, aij für das Bild von
j∈n
(i, j) in X steht).
Jede (m×n)-Matrix A hat m Zeilen“ A1 , . . . , Am und n Spalten“ A1 , . . . , An ,
”
”
definiert als n-Tupel (∼ Zeilen) bzw. m-Tupel (∼ Spalten) über X wie in unseren Setzungen in Kapitel 0, S. 12ff.8
Schließlich beweisen wir zwei wichtige, aufeinander aufbauende klassische
Anzahlformeln:
1.8.3 |Y X | = |Y ||X| , falls X, Y endliche Mengen sind.
Beweis durch vollständige Induktion nach |X|: Ist |X| = 0, also X = ∅, so
gibt es genau eine Abbildung von X in Y , nämlich ∅ (die leere Menge von
Urpaaren). In der Tat ist dann |Y X | = |Y ∅ | = 1 = |Y |0 = |Y ||X| .9 Sei nun
X eine endliche Menge 6= ∅, x ∈ X, X ′ := X r {x}, und es gelte bereits
′
′
′
|Y X | = |Y ||X | (Induktions-Voraussetzung). Für jedes ϕ ∈ Y X und y ∈ Y
sei definiert: ϕy := ϕ ∪ {(x; y)}. Dann ist die Abbildung
′
Y X × Y → Y X , (ϕ, y) 7→ ϕy
7
Man beachte den erheblichen Unterschied zu Kapitel 0: Dort haben wir lediglich
Schreibweisen eingeführt und zugehörige Vorstellungen entwickelt. Hier hingegen erhalten die mit Tupel“ bzw. Matrix“ benannten Gegenstände ihren Platz im systematischen
”
”
Aufbau der mathematischen Begriffswelt.
8
Formal: Ist A eine (m × n)-Matrix über X, i ∈ m, j ∈ n, so heißt das n-Tupel
((i, 1)A, . . . , (i, n)A) die i-te Zeile Ai , das m-Tupel ((1, j)A, . . . , (m, j)A) die j-te Spalte Aj
von A.
9
U. a. an dieser Stelle zeigt sich, wie vernünftig es ist, daß wirklich jede nullte Potenz“
”
0
x durch 1 definiert ist, also auch 00 . Dies bewährt sich (als Randfall) in eigentlich jeder
kombinatorischen Anzahlformel, die eine Potenz als Term enthält.
40
bijektiv: Jede Funktion von X nach Y erhält man auf eindeutige Weise,
indem man eine Funktion von X ′ nach Y dadurch ergänzt, daß man auch
′
noch dem Element x einen Wert in Y zuweist. Es folgt: |Y X | = |Y X ×Y | =
1.8.2
′
|Y X | · |Y | = |Y ||X| .
1.8.4 Für jede Menge X ist {(T ; χT )|T ⊆ X}
auf {0, 1}X . Ist also X endlich, so gilt:
10
eine Bijektion von P(X)
|P(X)| = 2|X| .
Denn zum einen sind zwei Teilmengen gleich, wenn sie dieselbe charakteristische Funktion besitzen, nämlich jeweils gleich dem vollständigen Urbild
von 1. Zum anderen erhält man bei gegebener Funktion ϕ von X in {0, 1}
durch das vollständige Urbild von 1 eine Teilmenge T von X mit χT = ϕ. Die
angegebene Funktion ist also sowohl injektiv wie auch surjektiv. Die Formel
im endlichen Fall folgt nun direkt aus 1.8.3.
1.9 Definition (Relation, reflexiv, symmetrisch, transitiv, teilt, Kongruenz,
Äquivalenz-Relation) Eine Relation ist eine Menge von Paaren. Seien X, Y
Mengen. Unter einer Relation zwischen X und Y versteht man eine Teilmenge
von X × Y . Für uns wird hier ausschließlich der Spezialfall X = Y von
Interesse sein. Eine Relation zwischen X und X wird eine Relation auf X
genannt. Für jede Relation S heißt S ∩ (X × X) die von S auf X induzierte
Relation.
1.9.1 Beispiel Sei X := N, R := {(x, y)|x, y ∈ N, ∃n ∈ N y = x + n}.
Offenbar liegt ein Paar (x, y) natürlicher Zahlen genau dann in R, wenn x
echt kleiner als y ist. Daher heißt diese Relation die Kleiner-Relation auf N.
Sie gehört zu den aus Schulzeiten altgewohnten Gegenständen, wird allerdings nicht nur für natürliche Zahlen, sondern allgemeiner für reelle Zahlen
betrachtet (was in der obigen Definition ausdrücklich nicht geschehen ist!). R
ist die von der (auf der Menge der reellen Zahlen gegebenen) Relation < auf
N induzierte Relation.11 Bildet man bei geordneten Paaren wie bei Urpaaren
nun die Umkehrung, so wird aus < die Relation größer“, geschrieben: >.
”
Die Gewohnheit, z. B. 3 < 5“ statt (3, 5) ∈<“ zu schreiben, läßt auch die
”
”
allgemeine Konvention folgender Schreibweise als natürlich erscheinen: Ist R
10
Zur Definition von χT siehe 1.3.
Baut man systematisch die Zahlbereiche vom Mengenbegriff aus auf und hat auf N
erklärt, was +“ bedeuten soll – Teil eines Themas, das uns noch im nächsten Kapitel
”
bevorsteht, – so kann man kleiner“ wörtlich als unsere obige Relation R definieren; d. h.
”
im systematischen Aufbau erhält kleiner“ erst dadurch seinen Platz in der Begriffswelt.
”
11
41
eine Relation, so schreiben wir xRy statt (x, y) ∈ R.
Eine Relation R heißt auf einer Menge X
reflexiv, wenn gilt: ∀x ∈ X
12
xRx
symmetrisch, wenn gilt: ∀x, x′ ∈ X
transitiv, wenn gilt: ∀x, x′ , x′′ ∈ X
(xRx′ ⇒ x′ Rx)
(xRx′ , x′ Rx′′ ⇒ xRx′′ ).
Zum Beispiel sind die Relationen < und > auf der Menge der reellen Zahlen,
also erst recht auf N, transitiv, aber weder reflexiv noch symmetrisch, dagegen die (die Gleichheit zulassende) Kleiner-oder-gleich“-Relation ≤ reflexiv
”
und transitiv, aber sie ist nicht symmetrisch. Weiter ist die Relation 6=, Un”
gleichheit“, symmetrisch, aber nicht reflexiv und nicht transitiv; es gilt z. B.
1 6= 2 und 2 6= 1, aber nicht 1 6= 1.
Ein besonders wichtiges Beispiel einer Relation auf der Menge Z der ganzen
Zahlen erhält man durch die Setzung
| := {(x, y)|x, y ∈ Z, ∃z ∈ Z y = xz}.
Dies ist die Teiler-Relation auf Z, kurz: teilt“.
”
| ist reflexiv, denn für alle x ∈ Z gilt x = x · 1, also x|x. | ist transitiv; sind
nämlich x, y, v ∈ Z mit x|y, y|v, so gibt es z, z ′ ∈ Z mit y = xz, v = yz ′ , so
daß folgt: v = xzz ′ , mithin x|v. | ist nicht symmetrisch, denn z. B. gilt 2|6,
aber nicht 6|2. (Für x teilt nicht y“ schreibt man: x ∤ y.)
”
Die Relation | ist Grundlage für eine wichtige Sorte von Relationen auf Z,
von der wir zunächst ein Beispiel betrachten: Wir setzen
≡:= {(x, y)|x, y ∈ Z, 3|x − y}.
3
Diese Relation heißt die Kongruenz modulo 3. Sie ist reflexiv, da für jedes
x ∈ Z die Differenz x − x, also die Zahl 0, von jeder ganzen Zahl geteilt
wird, also auch von 3. Sie ist symmetrisch, da für alle x, y ∈ Z die Gleichung
y − x = −(x − y) gilt, also 3|x − y genau dann gilt, wenn 3|y − x. Weiter
12
Ohne den relativierenden Bezug auf X nennt man R (absolut) reflexiv, symmetrisch
bzw. transitiv, wenn die angegebenen Implikationen für die gesamte Komponentenmenge
von R (d. h. die Menge aller bei den zu R gehörigen Paaren vorkommenden Komponenten)
erfüllt sind. Ist R im absoluten Sinne symmetrisch bzw. transitiv, so ist R auch auf jeder
Menge X symmetrisch bzw. transitiv. Man beachte aber: Die Reflexivität überträgt sich
nur auf solche Mengen X, die in der Komponentenmenge von R enthalten sind ! Als Extremfall sei erwähnt: Die leere Relation ∅ ist symmetrisch und transitiv auf jeder Menge,
aber reflexiv nur auf der Menge X = ∅.
42
ist sie auch transitiv: Sind x, y, z ∈ Z und gilt x ≡ y, y ≡ z, d. h. 3|x − y,
3
3|y − z, so folgt: 3|(x − y) + (y − z) = x − z, d. h. x ≡ z.
3
3
Für welche x ∈ Z gilt x ≡ 0, 1, . . . ?
3
x ≡ 0 ⇔ 3|x − 0 ⇔ ∃z ∈ Z x = 3z.
3
Für die Menge dieser Elemente x schreiben wir kurz 3Z.
x ≡ 1 ⇔ 3|x − 1 ⇔ ∃z ∈ Z x = 3z + 1.
3
Für die Menge dieser Elemente x schreiben wir entsprechend 3Z + 1. Ebenso
versteht es sich, daß wir 3Z + 2 für die Menge der ganzen Zahlen x mit x ≡ 2
3
schreiben. Die Bedingung x ≡ 3 ist gleichwertig zu x ≡ 0, wurde also schon
3
3
behandelt, wie überhaupt jede weitere Kongruenz x ≡ j für irgendein j ∈ Z.
3
Die Menge der x, die eine solche Kongruenz erfüllen, ist eine der drei Mengen
3Z, 3Z + 1, 3Z + 2: Es gilt 3Z + j = 3Z + i für dasjenige i ∈ {0, 1, 2}, für das
gilt: j ≡ i. Jede ganze Zahl liegt also in genau einer der Mengen
3
3Z :
{ . . . , −9, −6, −3, 0, 3, 6, 9, 12, . . . }
3Z + 1 : { . . . , −8, −5, −2, 1, 4, 7, 10, 13, . . . }
3Z + 2 : { . . . , −7, −4, −1, 2, 5, 8, 11, 14, . . . }
Diese bilden daher eine Partition von Z.
Eine Relation R auf einer Menge X heißt eine Äquivalenz-Relation auf X,
wenn R reflexiv, symmetrisch und transitiv ist. Zum Beispiel ist ≡ eine
3
Äquivalenz-Relation auf Z. Allgemein beweist man dies bei gegebenem k ∈ Z
genauso wie im Falle k = 3 für die Kongruenz modulo k: 13
≡:= {(x, y)|x, y ∈ Z, k|x − y}.
k
1.9.2 Für jedes k ∈ Z gilt: ≡ ist eine Äquivalenz-Relation auf Z.
k
1.9.3 Ist ϕ eine Abbildung einer Menge X in eine Menge Y , so setzen wir
∼ϕ := {(x, x′ )|x, x′ ∈ X, xϕ = x′ ϕ}.
Dann ist ∼ϕ eine Äquivalenz-Relation auf X:
13
Man beachte, daß ≡ die All-Relation“ Z × Z, ≡ dagegen die Gleichheits-Relation auf
”
1
0
Z ist. Negative Werte für k haben keine eigenständige Bedeutung, denn es gilt ≡= ≡ für
k
alle k ∈ Z.
43
−k
Denn für alle x ∈ X gilt xϕ = xϕ, d. h. ∼ϕ ist reflexiv; weiter bedeutet
(x, x′ ) ∈∼ϕ dasselbe wie (x′ , x) ∈∼ϕ , nämlich xϕ = x′ ϕ, d. h. ∼ϕ ist symmetrisch; schließlich folgt genauso simpel auch die Transitivität von ∼ϕ .
Ist nun ∼ eine beliebige Relation auf einer Menge X, x0 ∈ X, so setzen wir
[x0 ]∼ := {x|x ∈ X, x ∼ x0 }.
Trivial ist
1.9.4 ∼ reflexiv ⇔ ∀x0 ∈ X
x0 ∈ [x0 ].
Ist ∼ eine Äquivalenz-Relation, so heißt [x0 ]∼ die Äquivalenzklasse von x0 .
Jedes Element x ∈ [x0 ]∼ heißt ein Repräsentant der Äquivalenzklasse von x0 .
Eine Teilmenge T von X heißt eine Äquivalenzklasse bezüglich ∼, wenn es ein
x0 ∈ X gibt mit T = [x0 ]∼ .
1.9.5 Beispiele (1) Kongruenzklassen:
[0]≡ = 3Z,
[1]≡ = 3Z + 1,
3
[2]≡ = 3Z + 2,
3
3
= [3]≡ = [6]≡ = . . .
= [4]≡ = [7]≡ = . . .
= [5]≡ = [8]≡ = . . .
= [−3]≡ = [−6]≡ = . . .
= [−2]≡ = [−5]≡ = . . .
= [−1]≡ = [−4]≡ = . . .
3
3
3
3
3
3
3
3
3
3
3
3
Allgemein: [0]≡ = kZ, [1]≡ = kZ+1, . . . , [k−1]≡ = kZ+(k−1) = kZ+(−1)
k
k
k
(2) Vollständige Urbilder: Sei ϕ eine Abbildung einer Menge X in eine Menge
Y . Die Äquivalenzklassen bezüglich ∼ϕ (siehe 1.9.3) sind die vollständigen
Urbilder yϕ− mit y ∈ N(ϕ).
Zum Beweis von (2) seien x0 , x ∈ X. Es gilt: x ∈ [x0 ]∼ϕ ⇔ x ∼ϕ x0 ⇔ xϕ =
x0 ϕ. Setzen wir y := x0 ϕ− , so folgt: [x0 ]∼ϕ = yϕ− .
Insbesondere ergibt nun 1.4: Die Menge der Äquivalenzklassen bezüglich ∼ϕ
ist die Partition X/ϕ der ϕ-Urbilder.
1.9.6 Ist ∼ Äquivalenz-Relation auf einer Menge X, so gilt für alle x0 , x ∈ X
x ∈ [x0 ]∼ ⇔ [x]∼ = [x0 ]∼
Beweis. Es gelte zunächst x ∈ [x0 ]∼ , also x ∼ x0 . Für beliebiges y ∈ X folgt
dann aus der Transitivität von ∼
y ∈ [x]∼ ⇒ y ∼ x ⇒ y ∼ x0 .
44
Weil wegen der Symmetrie von ∼ auch x0 ∼ x gilt, folgt wieder mit der
Transitivität auch
y ∈ [x0 ]∼ ⇒ y ∼ x0 ⇒ y ∼ x.
Also gilt [x]∼ = [x0 ]∼ . – Für die Umkehrung ist nur zu bemerken, daß nach
1.9.4 x ∈ [x]∼ gilt.
1.10 Satz Sei X eine Menge.
(1) Sei ∼ eine Äquivalenz-Relation auf X. Dann ist die Menge der Äquivalenzklassen bezüglich ∼ eine Partition von X.
(2) Sei M eine Partition von X. Dann ist
∼:= {(x, x′ )|x, x′ ∈ X, ∃T ∈ M x ∈ T, x′ ∈ T }
eine Äquivalenz-Relation auf X und M die Menge ihrer Äquivalenzklassen.
Für die Menge der Äquivalenzklassen zu einer Äquivalenz-Relation ∼ schreiben wir X/ ∼.
Beweis. (1) Wir haben die drei definierenden Eigenschaften einer Partition
(siehe 1.3) nachzuweisen:
(o) Ist T ∈ X/∼, so gibt es ein x0 ∈ X mit T = [x0 ]∼ , nach 1.9.4 also x0 ∈ T ,
damit T 6= ∅.
S
S
(i) Sei x ∈ X. Nach 1.9.4 gilt: x ∈ [x]∼ ⊆ X/∼. Es folgt: X ⊆ X/∼,
also Gleichheit.
(ii) Seien S, T ∈ X/∼ mit S ∩ T 6= ∅, x ∈ S ∩ T . Durch Anwendung von
1.9.6 auf S und T erhalten wir: S = [x]∼ = T.
(2) Wir haben zunächst für ∼ die drei definierenden Eigenschaften einer
Äquivalenz-Relation nachzuweisen:
S
Reflexivität: Sei x ∈ X. Wegen M = X gibt es ein T ∈ M mit x ∈ T .
Also gilt (x, x) ∈ ∼.
Symmetrie: Seien x, x′ ∈ X mit (x, x′ ) ∈ ∼. Dann gibt es ein T ∈ M mit
x ∈ T , x′ ∈ T . Es folgt: (x′ , x) ∈ ∼.
Transitivität: Seien x, x′ , x′′ ∈ X mit (x, x′ ) ∈ ∼, (x′ , x′′ ) ∈ ∼. Dann gibt
es ein T ∈ M mit x, x′ ∈ T und ein S ∈ M mit x′ , x′′ ∈ S. Dann gilt
x′ ∈ S ∩ T , also S = T , aufgrund der paarweisen Disjunktheit der Elemente
von M. Da also x, x′′ ∈ T , folgt (x, x′′ ) ∈ ∼.
45
Gilt T ∈ M und x ∈ T , so ist (x, x′ ) ∈ ∼ gleichwertig zu x′ ∈ T ; also gilt
[x]∼ = T . Daher ist jedes T ∈ M eine Äquivalenzklasse bezüglich ∼. Ist umgekehrt S eine Äquivalenzklasse
bezüglich ∼, so S 6= ∅. Ist x ∈ S, so gibt es
S
ein T ∈ M mit x ∈ T (da M = X). Da T eine Äquivalenzklasse bezüglich
∼ ist, folgt aus 1.9.6: S = [x]∼ = T ∈ M.
Damit besteht zwischen Äquivalenz-Relationen auf X und Partitionen von
X eine bijektive Entsprechung.
Folgerung Sei k ∈ N. Die Menge der Kongruenzklassen modulo k ist eine
k-elementige Partition von Z. Es gilt: Z/≡ = {kZ, kZ+1, . . . , kZ+(k −1)}.
k
Schließlich streifen wir einen weiteren wichtigen Spezialfall des Relationsbegriffs, den der Ordnungsrelation:
1.11 Definition (strikt antisymmetrisch, vergleichbar, Striktordnung, totale (lineare) Ordnung) Sei X eine Menge. Eine Relation R heißt auf X strikt
antisymmetrisch, wenn gilt:
∀a, b ∈ X
(a, b) 6∈ R ∨ (b, a) 6∈ R,
d. h. wenn niemals zugleich (a, b) ∈ R und (b, a) ∈ R gilt. Eine auf X transitive, strikt antisymmetrische Relation heißt eine strikte Ordnung (oder Striktordnung oder strikte Ordnungsrelation) auf X.
Zum Beispiel sind auf N die Relationen < ( echt kleiner“), > ( echt größer“)
”
”
und k( := {(x, y)|x, y ∈ N, x|y ∧ x 6= y}) ( echter Teiler von“) Striktordnun”
gen.
Ein Element v ∈ X heißt vergleichbar bezüglich einer Relation R auf X, wenn
für alle a ∈ X r {v} gilt: (a, v) ∈ R ∨ (v, a) ∈ R. Ist R eine strikte Ordnung
auf X und jedes Element von X vergleichbar bezüglich R, so heißt R eine
totale (oder lineare) Striktordnung auf X.
Von den genannten Striktordnungen auf N sind < und > totale Ordnungen,
k dagegen nicht; z. B. gilt weder 2k3 noch 3k2.
Eine (gewöhnliche) Ordnung auf X erhält man, indem man eine Striktordnung auf X mit der Gleichheit auf X vereinigt. D. h. eine Striktordnung R
auf X induziert eine (gewöhnliche) Ordnung R auf X durch die Setzung
∀x, y ∈ X
(xRy
: ⇔ xRy ∨ x = y).
R ist die kleinste reflexive Relation auf X, die R enthält. Die naheliegendsten Beispiele auf N sind die Ordnungen ≤, ≥, |. Dabei sind wieder die
46
ersten beiden totale Ordnungen, die letzte nicht. Relationen, die reflexiv, antisymmetrisch und transitiv sind, dennt man auch teilweise Ordnungen, zur
Unterscheidung von totalen Ordnungen, in denen die Bedingung der Vergleichbarkeit erfüllt sein muß. Ist (X; R) eine geordnete Menge, so heißt eine
Teilmenge K von X eine Kette, wenn (K; R) eine total geordnete Menge ist.
Aufbau der wichtigsten Begriffe
→ : wird begrifflich weiterentwickelt zu“
”
↓ : wird spezialisiert zu“
”
Urpaar →
Funktion, Y X
↓
n-Tupel (X = n)
↓
geordnetes Paar (n = 2), M × N
47
→ Relation
↓
(i) Äquivalenz-Relation↔Partition
(ii) Ordnungsrelation
Kapitel 2
Verknüpfungen
2.1 Definition Seien A, B Mengen. Unter einer Verknüpfung zwischen A und
B verstehen wir eine Funktion ϕ mit A × B ⊆ V (ϕ). 1
2.1.1 Beispiele Sei n ∈ N.
(1) ϕ : Q × Qn → Qn , (a, (b1 , . . . , bn )) 7→ (ab1 , . . . , abn ) ist eine Verknüpfung
zwischen Q und Qn und erinnert an Kapitel 0, S. 14, wo wir für das
Bildelement die Schreibweise
a · (b1 , . . . , bn )
verwendet haben.
(2) ϕ : Qn × Qn → Q, ((a1 , . . . , an ), (b1 , . . . , bn )) 7→ a1 b1 + · · · + an bn . Diese
Verknüpfung zwischen Qn und Qn heißt das Standardskalarprodukt von
Qn .
(3) Seien X, Y , Z beliebige Mengen. Dann erhalten wir vermöge der Komposition von Abbildungen eine Verknüpfung HEA zwischen Y X und Z Y :
HEA : Y X × Z Y → Z X ,
(α, β) 7→ αβ,
(wobei die Bezeichnung HEA an Hinter-Einander-Ausführung erinnern soll).
Besonders wichtig und häufig sind Fälle, in denen sowohl A = B als auch
(A × A)ϕ ⊆ A gilt. Dann nennt man ϕ eine Verknüpfung auf der Menge A.2
1
Wir weisen darauf hin, daß unsere Definition nicht verlangt, daß A × B der genaue
Definitionsbereich von ϕ ist! Ist dies jedoch der Fall, so ist eine Verknüpfung ϕ zwischen
A und B nichts anderes als eine (A × B)-Matrix über X, wenn X eine den Bildbereich
von ϕ enthaltende Menge ist (s. S. 40).
2
Das Wort auf“ bedeutet hier nicht, daß ϕ surjektiv sein muß!
”
48
Die in der Schule als Grundrechenarten“ bezeichneten Verknüpfungen +
”
und · sind Beispiele für Verknüpfungen auf N, auf Z, auf Q, auf R. Ist A
endlich, so läßt sich eine Verknüpfung auf A konkret in Matrix-Schreibweise
angeben, wobei die Elemente von A oberhalb der Spalten und vor Beginn
der Zeilen (üblicherweise in derselben Reihenfolge) aufgelistet werden. Am
Schnittpunkt der Zeile zu dem Element a ∈ A mit der Spalte zu dem Element
b ∈ A wird das Element (a, b)ϕ notiert, wodurch die sog. Verknüpfungsta”
fel“ zu ϕ entsteht.3 Hat A zum Beispiel genau zwei Elemente G, U – die
Bezeichnung soll an gerade“, ungerade“ denken lassen –, so können wir
”
”
in naheliegender Weise zwei Verknüpfungen #, · durch die folgenden Verknüpfungstafeln definieren:
Addition“:
”
# G U
G G U
U U G
,
Multiplikation“:
”
· G U
G G G
U G U
Ist ϕ irgendeine Verknüpfung auf einer Menge A und sind a, b, c ∈ A mit
(a, b)ϕ = c, so schreibt man dafür üblicherweise aϕb = c, d. h. der Name ϕ
wird zu einem Verknüpfungssymbol“, und aus diesem Grunde wählt man als
”
Bezeichnungen für Verknüpfungen statt eines (griechischen oder lateinischen)
Buchstabens meist Zeichen wie ◦, •, +, ·.
(3) +̇ : Qn × Qn → Qn ,
(a1 , . . . , an )+̇(b1 , . . . , bn ) = (a1 + b1 , . . . , an + bn )
(4) Ist A = P(X) für eine Menge X, so sind ∩, ∪, △ Verknüpfungen auf A.
Eine Verknüpfung ◦ auf A heißt assoziativ auf A 4 , wenn für alle a, b, ∈ A
gilt: (a ◦ b) ◦ c = a ◦ (b ◦ c); kommutativ auf A, wenn für alle a, b ∈ A gilt:
a ◦ b = b ◦ a.
Ein Element e ∈ A heißt neutral in (A; ◦) (auch: in A bezüglich ◦), wenn für
alle a ∈ A gilt: a ◦ e = a = e ◦ a.5
Beispielsweise (siehe (4)) sind bei beliebiger gegebener Menge X die Verknüpfungen ∩, ∪, △ auf P(X) assoziativ und kommutativ.6 Bezüglich jeder
der drei Verknüpfungen gibt es in P(X) ein neutrales Element: X ist neutral
3
Man vergleiche mit der in Fußnote 1 erwähnten Sichtweise einer Verknüpfung.
Gilt V (◦) = A × A, so nennt man ◦ kurz assoziativ (statt assoziativ auf A). Entsprechendes gilt bezüglich der Kommutativität.
5
Das Entscheidende an der Neutralität ist, daß das Verknüpfen mit einem beliebigen
Element von A das letztere unverändert läßt. Die daraus folgende schwächere Eigenschaft,
daß e mit jedem a ∈ A vertauschbar ist, sollte nicht etwa zu einer verfehlten Assoziation
mit dem Kommutativgesetz verleiten.
6
Die Assoziativität von △ ist eine keineswegs offensichtliche Übungsaufgabe!
4
49
bezüglich ∩, ∅ ist neutral sowohl bezüglich ∪ als auch bezüglich △. In N gibt
es bezüglich + kein neutrales Element, während bezüglich · das Element 1
neutral ist. Man verifiziert unmittelbar:
2.1.2 Die zu einer Verknüpfung ◦ auf A gehörige Teilmengenfunktion7 ◦⊆
ist eine Verknüpfung auf P(A). Ist ◦ assoziativ (bzw. kommutativ) auf A, so
ist ◦⊆ assoziativ (bzw. kommutativ) auf P(A). Ist e ∈ A neutral bezüglich
◦, so ist {e} neutral in P(A) bezüglich ◦⊆ .
2.1.3 Ist ◦ irgendeine Verknüpfung auf A, so gibt es in A höchstens ein
neutrales Element bezüglich ◦.
Beweis. Seien e, f ∈ A neutrale Elemente bezüglich ◦. Dann gilt:
e = e ◦ f = f,
die erste Gleichung wegen der Neutralität von f , die zweite wegen der Neutralität von e. Es folgt: e = f .
2.2 Definition (Magma, Trägermenge, unitär, Halbgruppe, Semigruppe, Monoid, Gruppe) Ein Magma ist ein Urpaar (A; ◦), bei dem ◦ eine Verknüpfung
auf A ist. A heißt die Trägermenge des Magmas. Ein Magma (A; ◦) heißt assoziativ, wenn ◦ assoziativ auf A; kommutativ, wenn ◦ kommutativ auf A ist;
unitär, wenn es in A ein bezüglich ◦ neutrales Element gibt. Eine Halbgruppe
(auch: Semigruppe) ist ein assoziatives Magma. Ein Monoid ist eine unitäre
Halbgruppe.
Zum Beispiel ist (N; +) eine kommutative Halbgruppe, aber kein Monoid,
während (N0 ; +) ein kommutatives Monoid (mit dem neutralen Element 0)
ist. (Z; ·) ist ein kommutatives Monoid (mit dem neutralen Element 1), ebenso (Q; ·).
Ist (A; ◦) ein unitäres Magma mit neutralem Element e und sind a, b ∈ A
mit a ◦ b = e = b ◦ a, so heißt b invers zu a (bezüglich ·). Trivialerweise gilt
für beliebige Elemente a, b der Trägermenge eines unitären Magmas:
2.2.1 Ist b invers zu a, so ist a invers zu b.
Zwar formal inkorrekt, aber bequem und ohne sonderliche Gefahr von Mißverständnissen üblich ist es, kurz Element eines Magmas“ statt Element
”
”
der Trägermenge eines Magmas“ sagen. Ein Element a ∈ A heißt invertierbar
in (A; ◦), wenn es in A ein zu a (bezüglich ◦) inverses Element gibt.
7
Siehe S. 32. Zwar ist ◦⊆ auf P(A × A) erklärt, doch ist für uns nur von Interesse, daß
P(A) × P(A) darin enthalten ist (siehe Fußnote 1).
50
Zum Beispiel ist bei gegebener Menge X in (P(X); ∩) das neutrale Element
X auch das einzige invertierbare Element. Gibt es nämlich zu S ⊆ X ein
T ⊆ X mit S ∩ T = X, so folgt S = T = X. In (P(X); ∪) ist ähnlich ∅ das
einzige invertierbare Element. In (P(X); △) dagegen ist jedes Element invertierbar, und zwar invers zu sich selbst, denn für alle T ⊆ X gilt: T △T = ∅.
Sehr leicht lassen sich bereits unitäre Magmen mit 3-elementiger Trägermenge definieren, in der es zu einem Element sogar mehr als ein inverses Element
gibt. Solche Magmen sind dann jedoch jedenfalls nicht assoziativ, denn es
gilt:
2.2.2 In einem Monoid gibt es zu jedem Element höchstens ein inverses
Element.
Beweis. Sei (A; ◦) ein Monoid, e sein neutrales Element, a ∈ A, und seien b,
b′ ∈ A invers zu a. Wir berechnen auf zweifache Weise das Produkt b ◦ a ◦ b′ :
(b ◦ a) ◦ b′ = e ◦ b′ = b′ ,
b ◦ (a ◦ b′ ) = b ◦ e = b.
Da die Terme auf der linken Seite wegen der Assoziativität von ◦ gleich sind,
müssen auch die rechten Seiten gleich sein, d. h. b = b′ .
Wenn es also in einem Monoid zu einem Element a ein inverses Element gibt,
so ist dieses eindeutig bestimmt. Auf dieser Einsicht beruht die folgende
Konvention für die Schreibweise inverser Elemente in Monoiden (A; ◦): Bezeichnet man ◦ als Multiplikation“, so schreibt man a−1 für das zu einem
”
invertierbaren Element a inverse Element in (A; ◦). Bezeichnet man ◦ als Ad”
dition“, so schreibt man −a für das zu a inverse Element (auch genannt: das
”
Inverse zu a“) in (A; ◦). Das neutrale Element wird als die Eins“ (Schreib”
weise: 1A ) bzw. als die Null“ (Schreibweise: 0A ) des Monoids bezeichnet,
”
je nachdem man für die Verknüpfung die multiplikative oder die additive
Sprechweise benutzt.8
2.2.3 Seien a, b invertierbare Elemente eines Monoids. Dann folgt:
(1) a−1 ist invertierbar, und zwar gilt: (a−1 )−1 = a,
(2) a ◦ b ist invertierbar, und zwar gilt: (a ◦ b)−1 = b−1 ◦ a−1 .
8
Gebräuchlich ist es, für kommutative Verknüpfungen das Zeichen +, für beliebige
Verknüpfungen – die aber im Spezialfall natürlich ebenfalls kommutativ sein dürfen –
dagegen · oder ◦ zu verwenden.
51
Beweis. (1) ist nur eine Neuformulierung von 2.2.1, während (2) aus der
Gleichungskette
(a ◦ b) ◦ (b−1 ◦ a−1 ) = ((a ◦ b) ◦ b−1 ) ◦ a−1 = (a ◦ (b ◦ b−1 )) ◦ a−1 =
= (a ◦ e) ◦ a−1 = a ◦ a−1 = e = · · · = (b−1 ◦ a−1 ) ◦ (a ◦ b)
folgt.
Eine Gruppe ist ein Monoid, in dem jedes Element invertierbar ist. Kommutative Gruppen nennt man auch abelsche Gruppen9 .
Zum Beispiel sind (N0 ; +), (Z; ·), (Q; ·) kommutative Monoide, aber keine
Gruppen, ebenso (P(X); ∩), (P(X); ∪) bei gegebener nichtleerer Menge X.
Dagegen sind (Z; +), (Q; +), (Q r {0}; ·) abelsche Gruppen. Für jede Menge
X ist auch (P(X); △) eine abelsche Gruppe, und zwar mit der Besonderheit,
daß jedes Element gleich seinem Inversen ist.
2.3 Proposition Für jede Menge X gilt:
(1) (X X ; HEA) ist ein Monoid (mit idX als neutralem Element),
(2) SX := {ϕ|ϕ ∈ X X , ϕ bijektiv} ist (bezüglich der Verknüpfung HEA) eine
Gruppe.
Die Gruppe (SX ; HEA) heißt die symmetrische Gruppe auf X. Die Elemente
von SX heißen Permutationen von X.
Beweis. (1) Nach Beispiel (3) in 2.1.1 ist HEA eine Verknüpfung auf X X und
nach 1.5.4 assoziativ. Ferner gilt: ϕidX = ϕ = idX ϕ.
(2) Nach 1.5.5(3) ist HEA eine Verknüpfung auf SX und nach (1) assoziativ.
Wegen idX ∈ SX ist SX Monoid mit neutralem Element idX . Ist ϕ ∈ SX , so
nach dem Zusatz zu 1.6 auch die Umkehrfunktion von ϕ, und deren Komposition mit ϕ ergibt – von links wie von rechts – idX ; also ist sie invers zu
ϕ.10
Im häufig betrachteten Spezialfall X = n (für ein n ∈ N) schreibt man Sn
(statt Sn ). Eine Permutation von n ist ein bijektives n-Tupel über n. In
natürlicher Weise schreibt man Permutationen ϕ ∈ Sn daher als sog. Bildzeile:
(1ϕ, 2ϕ, . . . , nϕ),
9
nach Niels Hendrik Abel (1802 – 1829), norwegischer Algebraiker
Die früher eingeführte Schreibweise ϕ−1“ für die Umkehrfunktion von ϕ ist also mit
”
der in 2.2 eingeführten Schreibweise für inverse Elemente konsistent.
10
52
häufig aber auch als Zweizeiler, in dem die obere Zeile die Elemente 1, . . . , n
in ihrer natürlichen Reihenfolge, die untere dagegen in der durch ϕ permutierten Reihenfolge wiedergibt; es stehen hierbei also stets Urbild und Bild
übereinander:
1 2 ... n
1ϕ 2ϕ . . . nϕ.
Für n ≥ 3 ist die Gruppe (Sn ; HEA) nicht kommutativ, denn zum Beispiel
gilt: 11
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
=
6=
=
3 1 2
2 1 3
3 2 1
1 3 2
2 1 3
3 1 2
Wir geben eine Verknüpfungstafel der Gruppe S3 an:
HEA id3
id3
α
β
ρ
σ
τ
id3
α
β
ρ
σ
τ
α= 1 2 3
2 3 1
α
β
id3
σ
τ
ρ
β= 1 2 3
3 1 2
β
id3
α
τ
ρ
σ
ρ= 1 2 3
2 1 3
ρ
τ
σ
id3
β
α
σ= 1 2 3
3 2 1
σ
ρ
τ
α
id3
β
τ= 1 2 3
1 3 2
τ
σ
ρ
β
α
id3
Verknüpft man Elemente der Teilmenge {id3 , α, β}, so liegt das Ergebnis
stets wieder in {id3 , α, β}; dies ist der Verknüpfungstafel unmittelbar zu entnehmen. Auch die folgenden Teilmengen haben offenbar diese Eigenschaft:
{id3 , ρ},
{id3 , σ},
{id3 , τ },
ferner trivialerweise auch S3 selbst und {id3 }. Diese Teilmengen sind also
Trägermengen von Magmen (bezüglich der Verknüpfung HEA), und zwar sogar
von Gruppen, wie leicht zu sehen. Eine leichte Übungsaufgabe ist es zu zeigen,
daß die eben genannten Teilmengen die einzigen mit dieser Eigenschaft sind.
2.4 Definition (abgeschlossen, Teilmagma, Teilhalbgruppe, Teilmonoid, Teilgruppe, Untermagma, Untermonoid, Untergruppe) Sei (A; ◦) ein Magma,
T ⊆ A. T heißt (bezüglich ◦) abgeschlossen, wenn ◦ eine Verknüpfung auf
11
Warnung: Autoren, die die Linksschreibweise von Abbildungen verwenden, erlauben
sich bisweilen, bei der Komposition von Permutationen, das Zeichen ◦ ( nach“!) aus Be”
quemlichkeit wegzulassen. Die irritierende Konsequenz ist leider, daß die Komposition
dann wie hier notiert wird, die Ergebnisse gegenüber der von uns angegebenen Rechnung
aber vertauscht erscheinen! Darauf sollte man beim Lesen in der Literatur gefaßt sein.
53
T ist (d. h. (T × T )◦⊆ ⊆ T ). Eine abgeschlossene Teilmenge heißt auch ein
Teilmagma oder ein Untermagma von (A; ◦). T nennen wir eine Teilhalbgruppe
bzw. ein Teilmonoid bzw. eine Teilgruppe von (A; ◦), wenn (T ; ◦) eine Halbgruppe bzw. ein Monoid bzw. eine Gruppe ist.
Eine Teilhalbgruppe einer Halbgruppe (A; ◦) nennt man eine Unterhalbgruppe
von (A; ◦), ein Teilmonoid T eines Monoids (A; ◦) mit 1T = 1A ein Untermonoid von (A; ◦). Eine Teilgruppe einer Gruppe (A; ◦) wird eine Untergruppe
von (A; ◦) genannt; in diesem Fall stimmen die neutralen Elemente von (T ; ◦)
und (A; ◦) automatisch überein:
2.4.1 Ist T eine Teilgruppe einer Gruppe (A; ◦), so gilt 1T = 1A . Gilt a ∈ T ,
so hat a in (G; ◦) dasselbe Inverse wie in (T ; ◦).
Beweis: Sei x das Inverse von 1T in der Gruppe (A; ◦). Es gilt:
1A = 1T ◦ x = (1T ◦ 1T ) ◦ x = 1T ◦ (1T ◦ x) = 1T ◦ 1A = 1T .
Wegen 1T = 1A ist das Inverse von a ∈ T in (T ; ◦) auch ein Inverses in (A; ◦).
Dieses ist aber nach 2.2.2 eindeutig bestimmt.
Zum Beispiel ist N Unterhalbgruppe (aber kein Teilmonoid) von (Z; +) und
Untermonoid von (Z; ·). Die Menge −N der negativen ganzen Zahlen ist eine
Unterhalbgruppe von (Z; +), nicht jedoch von (Z; ·). Nach 2.3 ist für jede
Menge X die Menge SX der Permutationen von X eine Teilgruppe des Monoids (X X ; HEA), und zwar mit demselben neutralen Element, also auch ein
Untermonoid.
Ohne Gefahr von Mißverständnissen erlauben wir uns im Fall einer Teilgruppe T eines unitären Magmas (A; ◦) mit 1T = 1A , von einer Untergruppe zu
sprechen, auch wenn (A; ◦) keine Gruppe ist. Im Gegensatz zu dem äußerst
wichtigen Begriff der Untergruppe hat der oben aus rein systematischem
Grund eingeführte Begriff der Teilgruppe kaum eine Bedeutung in klassischen algebraischen Theorien.
Die einelementige Teilmenge {0} ist Untergruppe von (Z; +), sowie Teilgruppe, aber keine Untergruppe von (Z; ·). Allgemein ist in einem Magma (A; ◦)
eine einelementige Teilmenge {x} genau dann ein Teilmagma, wenn gilt:
x ◦ x = x. Ein Element x mit dieser Eigenschaft heißt idempotent (oder: ein
”
Idempotent“ von (A; ◦)). Die Idempotenten von (Z; ·) sind 0 und 1, während
0 das einzige Idempotent von (Z; +) ist. In einer Gruppe ist das neutrale
Element stets das einzige Idempotent, wie aus der Gleichung x ◦ x = x durch
Multiplikation mit x−1 sofort folgt.
2.4.2 Ist T ein unitäres Teilmagma eines Magmas (A; ◦), so ist T ein idempotentes Element des Magmas (P(A); ◦⊆ ).
54
Denn T ◦⊆ T ⊆ T , weil T unter ◦ abgeschlossen ist, und T = {1T } ◦⊆ T ⊆
T ◦⊆ T.
2.4.3 Sei x ein Idempotent einer Semigruppe (A; ◦) und M(x) := {y|y ∈
A, y ◦ x = y = x ◦ y}. Dann ist M(x) ein Teilmonoid von (A; ◦) mit dem
neutralen Element x.
Nach Voraussetzung über x gilt x ∈ M(x), und für alle y, z ∈ M(x) gilt:
(y ◦ z) ◦ x = y ◦ (z ◦ x) = y ◦ z = (x ◦ y) ◦ z = x ◦ (y ◦ z),
also y ◦ z ∈ M(x). Nach Definition von M(x) ist x neutral in (M(x); ◦). Da
◦ assoziativ auf A ist, folgt die Behauptung.
2.5 Proposition Sei (M; ◦) ein Monoid und E die Menge der invertierbaren
Elemente von (M; ◦). Dann ist E eine Untergruppe von (M; ◦).
Beweis. Sei e das neutrale Element von (M; ◦). Nach 2.2.3(2) ist E bezüglich
◦ abgeschlossen. Da ◦ auf M assoziativ ist, ist ◦ auch auf E assoziativ. Die
Gleichung e = e ◦ e zeigt, daß e ∈ E gilt; also ist e auch neutral in (E; ◦)
und letzteres somit ein Monoid. Gilt a ∈ E, so liegt nach 2.2.3(1) das in M
existierende Inverse a−1 ebenfalls in E. Daher ist in (E; ◦) jedes Element von
E invertierbar.
Die Gruppe (E; ◦) in 2.5 heißt die Einheitengruppe des Monoids (M; ◦).
Zur Hervorhebung des Bezuges zu (M; ◦) wird ihre Trägermenge auch mit
E(M; ◦) bezeichnet.
Zum Beispiel gilt: E(Z; ·) = {1, −1} (neutral: 1), E(Z; +) = Z (neutral: 0),
E(Q; ·) = Q r {0} (neutral: 1), E(X X ; HEA) = SX (neutral: idX ).
Eine besonders interessante Einheitengruppe gerät durch die Kombination
von 2.4.2 und 2.4.3, ausgehend von einer abelschen Gruppe (A; +), ins Blickfeld: Jede Untergruppe T von (A; +) ist ein Idempotent von (P(A); +⊆ ), so
daß nach 2.4.3 M(T ) ein Teilmonoid von (P(A); +⊆ ) ist. Die Gruppe dessen
invertierbarer Elemente beschreibt
2.6 Proposition Sei T eine Untergruppe einer abelschen Gruppe (A; +).
Dann besteht die Gruppe der invertierbaren Elemente des Teilmonoids M(T )
von (P(A); +⊆ ) aus den Teilmengen T + a mit a ∈ A.12 Jedes Element von
M(T ) ist Vereinigung einer Menge invertierbarer Elemente von (M(T ); +⊆ )
12
Dabei steht T + a für T +⊆ {a}, besteht also aus den Elementen x ∈ A, zu denen es
ein y ∈ T gibt mit x = y + a.
55
Beweis. Sei X ∈ M(T
S ). Dann gilt T +⊆ X = X, folglich T + b ⊆ X für alle
b ∈ X und X = b∈X (T + b), da (nach 2.4.1) b = 0A + b ∈ T + b für alle
b ∈ X.
Sei nun E die Menge der invertierbaren Elemente des Monoids (M(T ); +⊆ ).
Für alle a ∈ T gilt dann (unter Verwendung der Kommutativität von + an
der mit (∗) markierten Stelle)
(T +a)+⊆ (T +(−a)) = T +⊆ {a}+⊆ T +⊆ {−a} = T +⊆ T +⊆ {a}+⊆ {−a} = T
(∗)
und vermöge Anwendung desselben mit −a statt a auch
(T + (−a)) +⊆ (T + a) = T,
also T + a ∈ E. (Die Schlußaussage in 2.6 ist damit insbesondere schon
bewiesen.) Sei X ∈ E und Y das Inverse zu X in (E; +⊆ ). Dann folgt
[
[
[
T = X +⊆ Y =
(T + b) +⊆
(T + b′ ) =
T + b + b′ ,
b∈X
b′ ∈Y
(∗)
(b,b′ )∈X×Y
also b + b′ ∈ TSfür alle b ∈ X, b′ ∈ Y . Ist also c ein beliebiges Element von Y ,
so folgt X = b∈X (T + b) ⊆ T + (−c). Für alle b ∈ X gibt es also ein t ∈ T
mit b = t + (−c),
S woraus T + b = T + t + (−c) = T + (−c) folgt. Mit a := −c
gilt also X = b∈X (T + b) = T + a.
2.7 Definition (Restklasse, Faktorgruppe) Sei (A; +) eine abelsche Gruppe
und T eine Untergruppe von (A; +). Unter einer Restklasse von (A; +) nach
T versteht man eine Teilmenge X von A, zu der es ein a ∈ A gibt mit
X = T + a. Für jedes a ∈ A heißt T + a die Restklasse von a modulo T . Mit
A/T wird die Menge aller Restklassen von (A; +) nach T bezeichnet. Nach
2.6 ist (A/T ; +⊆ ) eine Gruppe. Diese heißt die Faktorgruppe von (A; +) nach
56
T.
13
Für alle a, b ∈ A gilt:
(T + a) +⊆ (T + b) = T + (a + b).
Untergruppen von Gruppen werden durch das folgende gleichermaßen einfache wie wichtige Kriterium gekennzeichnet:
2.8 Proposition (Untergruppenkriterium) Sei (G; ◦) eine Gruppe,
T ⊆ G. Es sind äquivalent:
(i) T ist eine Untergruppe von (G; ◦),
(ii) T 6= ∅
∧
∀a, b ∈ T
a ◦ b−1 ∈ T .14
Folgerung T
Ist M eine nichtleere Menge von Untergruppen einer Gruppe G,
so ist auch M eine Untergruppe von G.
Beweis. (i)⇒(ii) Es gelte (i). T hat ein neutrales Element, also gilt T 6= ∅.
Sind a, b ∈ T , so (mit 2.4.1) auch b−1 ∈ T , also aufgrund der Abgeschlossenheit von T auch a ◦ b−1 ∈ T .
(ii)⇒(i) Es gelte (ii). Es ist T 6= ∅, sei also c ∈ T . Nach Voraussetzung (mit
a = b = c) gilt dann c ◦ c−1 ∈ T , d. h. 1G ∈ T . Sind a, b ∈ T , so gilt daher
zunächst auch 1G ◦ b−1 ∈ T , also b−1 ∈ T. Weiter gilt dann a ◦ (b−1 )−1 ∈ T ,
nach 2.2.3(1) heißt das a ◦ b ∈ T . Also ist (T ; ◦) ein Monoid. Da mit b ∈ T
auch b−1 = 1G ◦ b−1 ∈ T gilt, ist (T ; ◦) eine Gruppe.
Zur Folgerung: Sei T
M eine nichtleere Menge von Untergruppen einer Gruppe G. Wir zeigen: M erfüllt (ii): Für alle T ∈ M gilt 1G ∈ T nach 2.4.1,
13
Bei genauem Hinsehen stellt man leicht fest, daß statt der Kommutativität von (A; +)
für die gesamte Konstruktion der Faktorgruppe nach T nur die wesentlich schwächere Eigenschaft der Untergruppe T eingeht, die im Beweis von 2.6 an der durch (∗) gekennzeichneten Stelle benutzt wird: T +⊆ {a} = {a} +⊆ T , bequemer“ geschrieben: T + a = a + T
”
für alle a ∈ T . Ist also (A; ◦) eine beliebige Gruppe und T eine Untergruppe mit der
Eigenschaft
(∗)
∀a ∈ A
T ◦ a = a ◦ T,
so ist die Menge A/T der Restklassen T ◦ a mit a ∈ A eine Teilgruppe von (P(A); ◦⊆ ),
die die Faktorgruppe von (A; ◦) nach T genannt wird. Die Untergruppen T mit der Eigenschaft (∗) spielen daher in der Gruppentheorie eine besonders wichtige Rolle; sie werden
Normalteiler von (A; ◦) genannt. In abelschen Gruppen ist natürlich jede Untergruppe ein
Normalteiler. In der Gruppe (S3 ; HEA) dagegen (siehe S. 53 sind die drei 2-elementigen
Untergruppen keine Normalteiler, die drei übrigen dagegen sind Normalteiler.
14
Bei additiver Schreibweise nimmt (ii) die Form an: T 6= ∅ ∧ ∀a, b ∈ T a − b ∈ T ,
wobei a − b := a + (−b). Die Subtraktion“ ist keine Verknüpfung von eigenständiger
”
Bedeutung, sondern wird (in abelschen Gruppen) wie angegeben auf die Addition und die
Inversenbildung zurückgeführt.
57
T
T
also: 1G ∈ M. Sind a, b T
∈ M, so a ◦ b−1 ∈ T für alle
T T ∈ M (nach
2.8(i)⇒(ii)), also a ◦ b−1 ∈ M. Damit wird 2.8(ii) von M erfüllt. Die
Behauptung folgt somit aus 2.8.
2.8.1 Beispiel Für alle k ∈ Z ist kZ eine Untergruppe von (Z; +).
Denn 0 ∈ kZ, und wenn a, b ∈ kZ, so k|a, k|b und damit auch: k|(a − b),
d. h. a − b ∈ kZ. 15
2.9 Proposition (Fundamentalbeispiel einer Gruppenkonstruktion)
Sei (G; ◦) eine Gruppe und X eine Menge. Auf der Menge GX definieren wir
˙ indem wir für alle ϕ, ψ ∈ GX setzen:
eine Verknüpfung ◦,
˙ : X → G, x 7→ xϕ ◦ xψ.
ϕ◦ψ
˙ eine Gruppe. Genau dann ist (GX ; ◦)
˙ abelsch, wenn (G; ◦)
Dann ist (GX ; ; ◦)
abelsch ist.
Beweis. ◦˙ ist assoziativ: Sind ϕ, ψ, ω ∈ GX , so gilt für alle x ∈ X:
˙ ◦ω)
˙ = x(ϕ◦ψ)
˙ ◦ xω = (xϕ ◦ xψ) ◦ xω
x((ϕ◦ψ)
˙ = x(ϕ◦(ψ
˙ ◦ω)).
˙
= xϕ ◦ (xψ ◦ xω) = xϕ ◦ x(ϕ◦ω)
◦ass.
˙ ◦ω
˙ = ϕ◦(ψ
˙ ◦ω).
˙
Es folgt: (ϕ◦ψ)
Bezeichnet e das neutrale Element von (G; ◦), so ist die Funktion ε : X → G,
˙ Ist ϕ ∈ GX , so gilt für alle x ∈ X
x 7→ e, neutral in (GX ; ◦):
˙ = xϕ ◦ xε = xϕ ◦ e = xϕ = e ◦ xϕ = xε ◦ xϕ = x(ε◦ϕ).
˙
x(ϕ◦ε)
˙ ein Monoid. Sei ϕ ∈ GX . Wir definieren ϕ̄ : X → G,
Also ist (GX ; ◦)
−1
x 7→ (xϕ) . Dann ist ϕ̄ zu ϕ invers, denn für alle x ∈ X gilt:
˙
x(ϕ◦˙ ϕ̄) = xϕ ◦ (xϕ)−1 = e = (xϕ)−1 ◦ xϕ = x(ϕ̄◦ϕ),
˙ Ist ◦ auf G kommutativ, so folgt für alle ϕ, ψ ∈ GX ,
also gilt: ϕ◦˙ ϕ̄ = ε = ϕ̄◦ϕ.
x∈X
˙
˙
x(ϕ◦)ψ)
= xϕ ◦ xψ = xψ ◦ xϕ = x(ψ ◦ϕ),
15
Es ist übrigens nicht schwer einzusehen, daß diese Untergruppen auch die einzigen
Untergruppen von (Z; +) sind: Die triviale Untergruppe {0} hat die Form kZ, da man nur
k = 0 zu setzen braucht. Ist T eine Untergruppe 6= {0} von (Z; +), so enthält T eine von 0
verschiedene, damit aber auch eine natürliche Zahl (da zu einer ganzen Zahl a 6= 0 entweder
a oder −a in N liegt). Setzt man nun k := min(T ∩ N), so folgt mittels vollständiger
Induktion für alle n ∈ N leicht kn ∈ T , damit aber aufgrund der Abgeschlossenheit von
T gegen Inversenbildung auch kZ ⊆ T . Ist jetzt t ∈ T und z ∈ Z minimal mit kz ≥ t, so
folgt 0 ≤ kz − t < k und kz − t ∈ T , nach Wahl von k also kz − t = 0, d. h. t = kz ∈ kZ.
58
˙ = ψ ◦ϕ.
˙ Ist umgekehrt ◦˙ auf GX kommutativ und sind a, b ∈ G, so
also ϕ◦ψ
sei ϕ : X → G, x 7→ a, ψ : X → G, x 7→ b. Dann folgt:
˙ = x(ψ ◦ϕ)
˙ = xψ ◦ xϕ = b ◦ a.
a ◦ b = xϕ ◦ xψ = x(ϕ◦ψ)
1. Spezialfall: n ∈ N, X = n, also GX = Gn . Die Menge der n-Tupel über
G ist bezüglich komponentenweiser Verknüpfung eine Gruppe.
2. Spezialfall: m, n ∈ N, X = m × n, also GX = Gm×n . Die Menge der
(m × n)-Matrizen über G ist bezüglich komponentenweiser Verknüpfung eine
Gruppe.
2.10 Definition (direkte Summe, direktes Produkt, direkte Zerlegung, direkter Summand, direkter Faktor) Seien (A; ◦), (B; ◦ ) Magmen. Für alle a,
A
a′ ∈ A, b, b′ ∈ B setzen wir
B
(a, b) ◦ (a′ , b′ ) := (a ◦ a′ , b ◦ b′ ).
A
B
Das Magma (A × B; ◦) heißt bei additiver Sprechweise die direkte Summe
(und wird dann häufig in der Form A ⊕ B geschrieben), bei multiplikativer
Sprechweise das direkte Produkt von (A; ◦) mit (B; ◦ ). Trivial ist:
A
B
2.10.1 Ist T ein Teilmagma von (A; ◦) und S ein Teilmagma von (B; ◦ ), so
A
B
ist T × S ein Teilmagma von (A × B; ◦).
Die Teilmagmen von (A×B; ◦) entstehen jedoch i. a. keineswegs alle auf diese
Weise! Vor dem katastrophalen Irrtum, dies zu denken, kann nicht deutlich
genug gewarnt werden. Wir betrachten einige Beispiele mit A = B = Q und
der Addition als Verknüpfung (auf Q bzw. Q2 ):
2.10.2 Beispiele (1) Q × {0}, {0} × Q sind Teilmagmen von (Q2 ; +) nach
2.10.1 (sogar Untergruppen). Betrachtet man die Funktion ϕ : Q → Q2 ,
c 7→ (c, 0), so gilt:
(i) ϕ ist eine Bijektion von Q auf Q × {0}.
(ii) Sind a, a′ , b ∈ Q mit a + a′ = b, so folgt aϕ + a′ ϕ = bϕ,
denn (a, 0)+(a′, 0) = (a+a′ , 0+0) = (a+a′ , 0). Man nennt eine Abbildung
ϕ mit (1i),(1ii) einen Isomorphismus von (Q; +) auf (Q × {0}; +).
(2) Sei U := {(a, a)|a ∈ Q}. Dann ist U eine Untergruppe von (Q2 ; +) und
ϕ : Q → U, a 7→ (a, a), ist ein Isomorphismus von (Q; +) auf (U; +). Die
Untergruppe U hat nicht die Form T × S mit T , S ⊆ Q.
59
(3) Sei V := {(a, −a)|a ∈ Q}. Da + kommutativ ist, ist V eine Untergruppe
von (Q2 ; +), denn für alle a, a′ ∈ Q gilt
(a, −a) + (a′ , −a′ ) = (a + a′ , (−a) + (−a′ )) = (a + a′ , −(a′ + a))
= (a + a′ , −(a + a′ )).
Es ist also ϕ : Q → V , a 7→ (a, −a) ein Isomorphismus von (Q; +) auf
(V ; +). Auch V hat nicht die Form T × S mit T , S ⊆ Q.
Es gilt: U ∩ V = {(0, 0)}, denn für ein a ∈ Q folgt aus a = −a offenbar a = 0.
Weiter gilt U +⊆ V = Q2 : Ist nämlich x ∈ Q2 , so existieren r, s ∈ Q mit
x = (r, s). Setzen wir a := r+s
, b := r−s
, so folgt
2
2
r + s r − s r + s r − s
= (r, s) = x.
+
,
−
2
2
2
2
(a, a) + (b, −b) =
Offenbar gilt auch: (Q×{0})∩({0}×Q) = {(0, 0)}, (Q×{0})+⊆ ({0}×Q) =
Q2 .
Gewisse Phänomene aus diesen Beispielen sind von allgemeinem Charakter:
2.10.3 Besitzen (A; ◦), (B; ◦ ) neutrale Elemente eA bzw. eB , so ist (eA , eB )
A
B
neutral in (A × B; ◦).
2.10.4 Sind (A; ◦), (B; ◦ ) Gruppen, so ist auch (A × B; ◦) eine Gruppe.
A
B
Denn nach 2.10.3 ist (eA , eB ) neutral bezüglich ◦, und zu (a, b) ∈ A × B ist
(a−1 , b−1 ) invers.
Additiv schreibt man (bei gegebenen Gruppen (A; +), (B; +))
A⊕B
für die Gruppe (A × B; ◦).
Sei (G; ◦) eine Gruppe. Unter einer 2-teiligen direkten Zerlegung von (G; ◦)
versteht man eine Menge {Y, Z} von Untergruppen Y , Z von (G; ◦) mit den
Eigenschaften:
(i) Für alle y ∈ Y , z ∈ Z gilt: y ◦ z = z ◦ y.16
(ii) Für jedes x ∈ G gibt es genau ein Paar (y, z) mit y ∈ Y , z ∈ Z, so daß
gilt: x = y ◦ z.
16
Für diese Bedingung wird auch die Formulierung verwandt: Y , Z sind miteinander
”
elementweise vertauschbar“. Sie besagt nichts über die Vertauschbarkeit zweier Elemente,
die beide zu Y bzw. beide zu Z gehören.
60
Sei 1G das neutrale Element von (G; ◦). Wir nennen {{1G }, G} die triviale
direkte Zerlegung von (G; ◦). Ist Y eine Untergruppe von (G; ◦), zu der es
eine Untergruppe Z von (G; ◦) gibt, so daß {Y, Z} eine direkte Zerlegung
von (G; ◦) ist, so heißt Y bei additiver Sprechweise ein direkter Summand, bei
multiplikativer Sprechweise ein direkter Faktor von (G; ◦). Wir beweisen eine
Äquivalenz zu (ii):
2.10.5 (ii)⇔ Y ◦⊆ Z = G, Y ∩ Z = {1G }
Die Gleichung Y ◦⊆ Z = G bedeutet, daß es zu jedem x ∈ G Elemente y ∈ Y ,
z ∈ Z gibt mit y ◦ z = x. Gilt Y ∩ Z = {1G } und sind y, y ′ ∈ Y , z, z ′ ∈ Z
mit y ◦ z = y ′ ◦ z ′ , so folgt
y ′−1 ◦ y = z ′ ◦ z −1 ,
| {z } | {z }
∈Z
∈Y
wegen Y ∩ Z = {1G } also y ′−1 ◦ y = 1G = z ′ ◦ z −1 und damit y = y ′, z = z ′ .
Gilt dagegen Y ∩ Z 6= {1G } und ist 1G 6= x ∈ Y ∩ Z, so sind (x, 1G ) und
(1G , x) beides Paare, deren Komponentenprodukt jeweils gleich x ist. Wegen
x 6= 1G gilt (x, 1G ) 6= (1G , x), also ist die Eindeutigkeitsbedingung in (ii)
verletzt. Damit gilt die Eindeutigkeit genau dann, wenn Y ∩ Z = {1G }. Die Bedingung (i) gilt in abelschen Gruppen (G; ◦) trivialerweise. In unseren
obigen Beispielen gilt daher, daß {U, V } sowie {Q × {0}, {0} × Q} 2-teilige
direkte Zerlegungen von (Q2 ; +) sind.17 U, V , Q × {0}, {0} × Q sind also Beispiele für direkte Summanden von (Q2 ; +). Diese Untergruppen sind
sämtlich zu (Q; +) isomorph.
2.11 Definition (Isomorphismus, Monomorphismus, Epimorphismus, Endomorphismus, Automorphismus) Sind (A; ◦), (B; ·) Magmen, so versteht
man unter einem Isomorphismus von (A; ◦) auf (B; ·) eine Abbildung ϕ :
A → B mit
(i) ϕ ist bijektiv,
(ii) ∀x, y ∈ A (x ◦ y)ϕ = xϕ · yϕ.
Gibt es einen Isomorphismus von (A; ◦) auf (B; ·), so heißt (A; ◦) isomorph
zu (B; ·). Schreibweise dafür: (A; ◦) ∼
= (B; ·). Gilt (ii), so heißt ϕ ein Homomorphismus von (A; ◦) in (B; ·). Ein injektiver Homomorphismus heißt ein
17
Die erste dieser Aussagen wird falsch, wenn man darin Q durch Z ersetzt, die zweite
nicht. – Man erkennt leicht, daß auch {U, {0} × Q}, {V, {0} × Q}, {U, Q × {0}) und {V, Q ×
{0}) 2-teilige direkte Zerlegungen von (Q2 ; +) sind.
61
Monomorphismus, ein surjektiver Homomorphismus ein Epimorphismus. Unter einem Endomorphismus von (A; ◦) versteht man einen Homomorphismus
von (A; ◦) in (A; ◦). Ist dieser gleichzeitig eine Bijektion von A auf sich, so
nennt man ihn einen Automorphismus von (A; ◦).
2.11.1 Beispiel (siehe 2.9, 1. Spezialfall) Sei (G; ◦) eine Gruppe, e ihr neutrales Element, n ∈ N und j ∈ n. Wir setzen
Gj := {(e, . . . , e, g, e, . . . , e)|g ∈ G} = {ϕ|ϕ ∈ Gn , ∀i ∈ n r {j} iϕ = e} .
| {z } | {z }
j−1
n−j
˙ Setzen wir nämlich
Dann ist Gj ein direkter Summand von (Gn ; ◦).
G(j) := {(g1 , . . . , gj−1, e, gj+1, . . . , gn }|gi ∈ G} = {ϕ|ϕ ∈ Gn , jϕ = e} ,
˙ Die Abbildungen
so ist {Gj , G(j) } eine 2-teilige direkte Zerlegung von (Gn ; ◦).
G → Gj ,
und
Gn−1 → G(j) ,
g 7→ (e, . . . , e, g, e, . . . , e)
| {z } | {z }
j−1
n−j
(x1 , . . . , xn−1 ) 7→ (x1 , . . . , xj−1 , e, xj , . . . , xn−1 )
sind Isomorphismen (bezüglich der jeweils zugehörigen Gruppenverknüpfungen). Sei
ω : G → Gn , g 7→ (g, . . . , g),
˙ und ω ein IsomorphisU := Bild ω. Dann ist U eine Untergruppe von (Gn ; ◦)
˙ Ist (G; ◦) abelsch, so ist {U, G(j) } für jedes j ∈ n
mus von (G; ◦) auf (U; ◦).
˙
eine 2-teilige direkte Zerlegung von (Gn ; ◦).
2.11.2 Seien (A; ◦), (B; ◦ ) Gruppen, 1A bzw. 1B ihre neutralen Elemente,
A
B
G := A × B und ◦ wie in 2.10. Sei
A∗ := {(a, 1B )|a ∈ A}, B ∗ := {(1A , b)|b ∈ B}.
Dann ist {A∗ , B ∗ } eine 2-teilige direkte Zerlegung von (G; ◦), und
ϕ : A → A∗ , a 7→ (a, 1B ),
sind Isomorphismen.
62
ψ : B → B ∗ , b 7→ (1A , b)
Beweis. Seien y ∈ A∗ , z ∈ B ∗ . Dann existieren a ∈ A, b ∈ B mit y = (a, 1B ),
z = (1A , b). Es folgt:
y ◦ z = (a, 1B ) ◦ (1A ; b) = (a, b) = (1A , b) ◦ (a, 1B ) = z ◦ y.
Ist x ∈ G, so gibt es a ∈ A, b ∈ B mit x = (a, b) = (a, 1B ) ◦ (1A , b), es gilt
also: G = A∗ ◦⊆ B ∗ . Weiter gilt A∗ ∩ B ∗ = {(1A , 1B )}. Mit 2.10.5 folgt nun
die erste Behauptung. Für alle a, a′ ∈ A gilt
(a ◦ ϕ = (a ◦ a′ , 1B ) = (a, 1B ) ◦ (a′ , 1B ) = aϕ ◦ a′ ϕ.
A
A
Also ist ϕ ein Homomorphismus, und die Bijektivität von ϕ ist aufgrund der
Definition von A∗ klar. Ebenso ist auch ψ ein Isomorphismus.
In umgekehrter Richtung gilt:
2.11.3 Ist {Y, Z} eine 2-teilige direkte Zerlegung einer Gruppe (G; ·), so
gilt (Y × Z; ◦) ∼
= (G; ·), und zwar ist ϕ : Y × Z → G, (y, z) 7→ y · z, ein
Isomorphismus.
Beweis. Seien y, y ′ ∈ Y , z, z ′ ∈ Z. Es gilt:
((y, z) ◦ (y ′ , z ′ ))ϕ = (y · y ′ , z · z ′ )ϕ = (y · y ′ ) · (z · z ′ ) = y · (y ′ · z) · z ′
= y · (z · y ′) · z ′ = (y · z) · (y ′ · z ′ ) = (y, z)ϕ · (y ′, z ′ )ϕ.
Also ist ϕ ein Homomorphismus. Nach 2.10.5 gilt Y ·⊆ Z = G, woraus die
Surjektivität von ϕ folgt. Aus der Eindeutigkeitsaussage in 2.10,(ii), folgt die
Injektivität von ϕ.
2.12 Definition (Distributiv(-Gesetze), Doppelmagma, Algebra, Trägergruppe, Ring, unitär, Null-Element, Eins-Element) Seien Magmen (A; +),
A
(B; +), (C; +) gegeben. (Wir verwenden für die Verknüpfungen hier die adB
ditive Schreibweise, da unsere hauptsächlichen Anwendungen im Folgenden
sich auf abelsche Gruppen beziehen werden. Zunächst wird aber über die Verknüpfungen auf A, B, C noch nichts Einschränkendes vorausgesetzt.) Eine
Verknüpfung · zwischen A und B mit A ·⊆ B ⊆ C heißt distributiv, wenn die
folgenden beiden Bedingungen gelten:
(D1 )
∀a ∈ A ∀b, b′ ∈ B
a · (b + b′ ) = a · b + a · b′
(D2 )
∀a, a′ ∈ A ∀b ∈ B
(a + a′ ) · b = a · b + a′ · b
B
A
Dabei heißt (D1 ) das Links-Distributivgesetz, (D2 ) das Rechts-Distributivgesetz.
63
2.12.1 Besitzt A ein bezüglich + neutrales Element 0A und ist (C; +) eine
A
Gruppe mit dem neutralen Element 0C , so folgt aus (D2 ) für alle b ∈ B
(1) 0A · b = 0C ,
(2) (−a) · b = −(a · b) für alle bezüglich + invertierbaren Elemente a ∈ A.
A
Beweis. (1) Für alle b ∈ B gilt 0A · b = (0A + 0A ) · b = 0A · b + 0A · b, also
A
0C = 0A · b + (−(0A · b)) = 0A · b + 0A · b + (−(0A · b)) = 0A · b.
(2) Ist a ∈ A bezüglich + invertierbar, so folgt für alle b ∈ B
A
a · b + (−a) · b = (a + (−a)) · b = 0A · b = 0C ,
(1)
also die Behauptung.
Natürlich gilt ebenso:
2.12.2 Besitzt B ein bezüglich + neutrales Element 0B und ist (C; +) eine
B
Gruppe mit dem neutralen Element 0C , so folgt aus (D1 ) für alle a ∈ A
(1) a · 0B = 0C ,
(2) a · (−b) = −(a · b) für alle bezüglich + invertierbaren Elemente b ∈ B.
B
Eine wichtige Sorte algebraischer Strukturen ergibt sich durch die Spezialisierung A = B = C, + = + = +. Sind +, · zunächst irgendwelche VerA
B
knüpfungen auf der Menge A, so nennen wir ((A; +); ·) ein Doppelmagma.
Interessante Doppelmagmen entstehen, wenn zwischen den Verknüpfungen +
und · gewisse Beziehungen gelten: Ist (A; +) eine abelsche Gruppe und · eine
distributive Verknüpfung auf A, so heißt das Doppelmagma ((A; +); ·) eine
Algebra. Dann wird (A; +) die Trägergruppe der Algebra und · ihre Multipli”
kation“ genannt. Ist · kommutativ auf A, so heißt die Algebra kommutativ;
ebenso heißt die Algebra assoziativ, wenn · auf A assoziativ ist.18 Assoziative
Algebren heißen auch Ringe. Das additiv neutrale Element 0A einer Algebra
((A; +); ·) heißt das Null-Element (auch die Null“) der Algebra. Eine Alge”
bra ((A; +); ·) wird unitär genannt, wenn sie ein neutrales Element 1A 6= 0A
bezüglich · enthält; dieses heißt dann das Eins-Element (auch die Eins“) der
”
18
Daß diese Spezifikation sich nur auf die Multiplikation der Algebra beziehen kann, ist
deswegen klar, weil ja die Verknüpfung + ohnehin stets kommutativ und assoziativ auf A
ist.
64
Algebra.19
Zum Beispiel ist ((Z; +); ·) ein kommutativer unitärer Ring; allgemeiner gilt
dies für ((Zn ; +̇); ·) (n ∈ N), wobei die Verknüpfungen komponentenweise zu
verstehen sind. Auch ((Q; +); ·), ((R; +); ·) sind kommutative unitäre Ringe.
Dagegen ist ((N; +); ·) kein Ring, weil (N; +) keine Gruppe ist.
Aus 2.12.1 und 2.12.2 folgt
2.12.3 Ist ((A; +); ·) eine Algebra, so gilt für alle a, b ∈ A
(1) 0A · a = 0A = a · 0A ,
(2) (−a) · b = −(a · b) = a · (−b).
2.13 Definition (Körper) Ein Körper ist ein kommutativer unitärer Ring
((A; +); ·), in dem jedes Element 6= 0A ein multiplikativ Inverses besitzt. Ein
Doppelmagma ((A; +); ·) ist also genau dann ein Körper, wenn (A; +) und
(A r {0A }; ·) abelsche Gruppen sind und · distributiv ist. Zum Beispiel sind
((Q; +)·), ((R; +)·) Körper, jedoch ist ((Z; +)·) kein Körper, da (Z r {0}; ·)
keine Gruppe ist.
Es gibt jedoch auch Körper ganz anderer Bauart: Setzen wir nämlich etwa
A := {G, U} und definieren zwei Verknüpfungen #, · auf A wie auf S. 49, so
ist (A; #) eine abelsche Gruppe (0A = G) und (A r {G}; ·) ebenfalls (und
zwar mit der 1-elementigen Trägermenge {U}). Ein Produkt a·b mit a, b ∈ A
ist gleich G, wenn a = G gilt, und gleich b, wenn a = U gilt; daraus folgt
sofort die Distributivität der Multiplikation ·. Also ist ((A; #); ·) ein Körper,
der genau zwei Elemente enthält: 0A = G 6= U = 1A .
Wir schreiben im folgenden [x] für die Kongruenzklasse einer ganzen Zahl x
modulo 3 (siehe 1.9) und setzen K := Z/≡. Dann gilt: K = {[0], [1], [2]}.
3
Zusätzlich zu der uns schon bekannten Verknüpfung +⊆ definieren wir (per
Verknüpfungstafel) eine Multiplikation • auf K:
+⊆
[0]
[1]
[2]
[0]
[0]
[1]
[2]
[1]
[1]
[2]
[0]
[2]
[2]
[0]
[1]
•
[0]
[1]
[2]
,
[0]
[0]
[0]
[0]
[1]
[0]
[1]
[2]
[2]
[0]
[2]
[1]
,
Dann ist (K; +⊆ ) die Faktorgruppe von (Z; +) nach der Untergruppe 3Z
(s. 2.7), und für alle x, y ∈ Z gilt [x] • [y] = [xy]. Aus dieser Regel folgt sehr
19
Die Gleichheit 1A = 0A würde bedeuten: A = {0A }. Eine nur aus dem Null-Element
bestehende Algebra wird also nicht zu den unitären Algebren gezählt.
65
schnell, daß • distributiv ist, durch Zurückführung auf die Distributivität der
Multiplikation in Z: Für alle x, x′ , y ∈ Z gilt
([x] +⊆ [x′ ]) • [y] = [(x + x′ )y] = [xy + x′ y] = [x] • [y] +⊆ [x′ ] • [y].
Betrachten wir nun Kr{[0]}, so erhalten wir dafür die folgende Verknüpfungstafel:
• [1] [2]
[1] [1] [2] .
[2] [2] [1]
Wir wissen aber schon, daß dies die Verknüpfungstafel einer abelschen Gruppe ist, denn wie ein Vergleich mit der Verknüpfungstafel für die additive
Gruppe ({G, U}; #) des gerade oben zuvor betrachteten Körpers (siehe S. 49)
lehrt, ist die Abbildung [1] 7→ G, [0] 7→ U ein Isomorphismus von (K; •) auf
({G, U}; #).20 Daher ist ((K; +⊆ ); •) ein Körper.21 Es gilt: 0K = [0], 1K = [1].
Die Multiplikation • stimmt, wenn nur einer der Faktoren von [0] verschieden
ist, mit dem Teilmengenprodukt ·⊆ überein. Man sollte jedoch beachten, daß
laut Definition [0] • [0] = [0], dagegen [0] ·⊆ [0] = 9Z 6= [0] gilt. Es handelt
sich bei • also nicht um das Teilmengenprodukt!
Wir sind es von den in der Schule behandelten Zahlbereichen gewohnt, daß
Quadrate keine negativen Zahlen sein können, insbesondere daß −1 kein
Quadrat ist. Es gibt aber Körper, in denen letzteres der Fall ist: Ein Beispiel
dafür ist bereits der oben betrachtete 2-elementige Körper A = {G, U}, denn
in diesem gilt die merkwürdige Gleichung −1A = 1A = (1A )2 . In unserem 3elementigen Körper ((K; +̇); •) hingegen gilt:
−1K = [2] 6= x2 für alle x ∈ K,
denn [0]2 = [0], [1]2 = [1] = [2]2 . Wir stellen nun eine Konstruktion vor,
bei der man, ausgehend von einem beliebigen Körper ((K; +); ·), in dem
20
Natürlich läßt sich die Gruppen-Eigenschaft der winzigen Struktur ({[1], [2]}; •) auch
sehr leicht direkt einsehen. Dennoch ist der oben vorgeschlagene Weg der weit elegantere:
Er vermeidet jegliches Rechnen, sondern verwendet nur die Tatsache, dasß ein Magma,
das zu einer Gruppe isomorph ist, selbst eine Gruppe ist – eine ohnehin unverzichtbare
Einsicht, die mit klarem Verständnis des Isomorphiebegriffs sich als Trivialität ausnimmt.
21
Ersetzt man die Zahl 3 durch eine beliebige natürliche Zahl k > 1, so erhält man
entsprechend stets einen kommutativen unitären Ring mit der Trägermenge Z/≡, also mit
k
genau k Elementen. Ein Körper entsteht dabei genau dann, wenn k eine Primzahl ist. Wir
beweisen diese Aussage hier nicht, möchten aber darauf hinweisen, daß für die Entstehung
des drei-elementigen Körpers in der obigen Konstruktion die Tatsache entscheidend ist,
daß 3 eine Primzahl ist! – Wählt man statt dessen k = 2, so erhält man übrigens einen zu
(({G, U }; #); ·) isomorphen Körper.
66
die Gleichung x2 = −1K unlösbar ist, einen Körper ((L; +̇); ◦) gewinnt, in
dem die Gleichung x2 = −1L lösbar ist; dabei wird L eine zu K isomorphe
Teilstruktur enthalten:
Sei also ((K; +); ·) zunächst ein beliebiger Körper. Wir setzen L := K 2 und
definieren zwei Verknüpfungen auf L:
(a, b)+̇(c, d) :=
(a + c, b + d)
(a, b) ◦ (c, d) := (a · c − b · d, a · d + b · c)
für alle a, b, c, d ∈ K. Durch überraschungsloses Nachrechnen verifiziert
man, daß dann ((L; +̇); ◦) ein kommutativer unitärer Ring mit 0L = (0K , 0K ),
1L = (1K , 0K ) ist. Ferner ist die Abbildung
ϕ : K → L,
a 7→ (a, 0K )
ein Monomorphismus sowohl bezüglich der Additionen +, +̇ als auch bezüglich
der Multiplikationen ·, ◦. Es ist Bild ϕ = K × {0K }, letzteres also ein
Teil-Doppelmagma von ((L; +̇); ◦), das zu ((K; +); ·) (bezüglich beider Verknüpfungen) isomorph ist: Es ist ein zu ((K; +); ·) isomorpher Teilkörper von
((L; +̇); ◦). Es gilt:
(0K , 1K )2 = (−1K , 0K ) = −1L ,
also ist die Gleichung x2 = −1L in ((L; +̇); ◦) lösbar.
Wenn nun bereits K ein Element c enthält mit c2 = −1K , so folgt, daß auch
(c, 0K )2 = −1L gilt, also
(c, 1K ) ◦ (c, −1K ) = ((c, 0K )+̇(0K , 1K )) ◦ ((c, 0K ) − (0K , 1K )) = 0L ,
d. h. L r {0L } ist nicht multiplikativ abgeschlossen, insbesondere keine Gruppe. Also ist dann ((L; +̇); ◦) kein Körper.
Sei nun die Gleichung x2 = −1K in ((K; +)·) unlösbar. Sind dann a, b ∈ K
mit (a, b) 6= 0L , so folgt a2 + b2 6= 0K : Im Falle b 6= 0K erhielten wir
sonst nämlich zunächst die Gleichung a2 = −b2 und daraus den Widerspruch (a · b−1 )2 = −1K , im Falle a 6= 0K entsprechend den Widerspruch
(a−1 · b)2 = −1K . Nun zeigt die Gleichung
(a, b) ◦ (a · (a2 + b2 )−1 , −b · (a2 + b2 )−1 ) = (1K , 0K ) = 1L ,
daß (a, b) in (L r {0L }; ◦) invertierbar ist. Also ist ((L; +̇); ◦) ein Körper. Bezeichnet man das Element (0K , 1K ) mit i und schreibt man für (a, 0K ) ◦ (b, c)
kurz a(b, c), so läßt sich jedes Element von L eindeutig in der Form a1L +̇bi
67
mit a, b ∈ K schreiben.
Im Falle von R als Startkörper wird der hier konstruierte Körper komplexer Zahlkörper genannt. Er ist aufgrund zahlreicher Eigenschaften, die weder ihrer Art nach noch viel weniger hinsichtlich ihrer Relevanz für enorm
viele Kontexte hier diskutiert werden können, eines der zentralen mathematischen Objekte. Doch schon in dem sehr viel bescheideneren“ Fall des
”
Körpers mit 3-elementiger Trägermenge K (s. o.) ergibt sich durch die Konstruktion immerhin die bemerkenswerte Tatsache, daß es einen Körper mit
9 (= 32 ) Elementen gibt. Die weiterführenden Fragen in dieser Richtung sind
ein klassisches Thema der Algebra und werden in der späteren gleichnamigen
Vorlesung ausführlich behandelt.
Nachdem wir damit Ringe und Körper kennengelernt haben, lohnt sich ein
zweiter Blick auf Früheres: Wo wir uns aus Gründen der Konkretheit bzw.
Vertrautheit mit Konzepten unter Bezugnahme auf den rationalen Zahlkörper
((Q; +); ·) beschäftigt haben, läßt sich nämlich häufig Q durch die Trägermenge eines beliebigen kommutativen unitären Ringes K ersetzen, in gewissen
Fällen aber auch nur“ durch die eines Körpers K: Werden in den Nach”
weisen nur die allgemeinen Ringgesetze verwendet, so gilt das Behandelte in
der vollen Allgemeinheit eines beliebigen Ringes; benutzt man jedoch in den
Schlußweisen multiplikativ Inverse von 0 verschiedener Zahlen (d−1 bzw. d1
für d ∈ Qr{0}), so gilt das Behandelte jedenfalls noch für Körper. An keiner
Stelle haben wir die konkrete Gestalt der Elemente von Q als Brüche verwandt, sondern – aus der inzwischen erreichten allgemeineren Optik heraus
– nur Ringgesetze bzw. Körpergesetze.
Einen Körper anstelle des Bereichs der rationalen Zahlen benötigen in Kapitel 0 die Proposition über die elementaren Gleichungssystem-Umformungen
(S. 10), entsprechend auch die Proposition von den elementaren Zeilenumformungen einer Matrix (S. 20) und der Algorithmus durch elementare Zeilenumformungen (S. 21).
Dagegen genügt ein kommutativer unitärer Ring anstelle des Bereichs der rationalen Zahlen im Falle der Bemerkung und des Satzes in Kapitel 0 (S. 16)
sowie in den Beispielen 2.1.1(1), (2), (3), 2.10.2(1), (2) (3). Man beachte aber,
daß bei den abschließenden Aussagen in 2.10.2 Brüche mit dem Nenner 2
gebildet werden. Will man diese also in allgemeinerer Form erhalten, so muß
in dem betrachteten kommutativen unitären Ring ((K; +); ·) zumindest das
Element 1K + 1K (welches ja die Rolle der rationalen Zahl 2 übernimmt)
multiplikativ invertierbar sein. Wir haben schon darauf hingewiesen, daß das
für K = Z nicht der Fall ist (Fußnote 17). Inzwischen kennen wir aber sogar einen Körper, für den dies nicht gilt: In dem oben betrachteten Körper
68
mit 2-elementiger Trägermenge A = {G, U} gilt 1A #1A = U#U = G = 0A ,
nicht invertierbar! Bei einem kommutativen unitären Ring ((K; +); ·), in dem
1K = −1K gilt, fallen die Untergruppen U, V in 2.10.2(2), (3) zusammen.22
22
Unser aus 2 Elementen bestehender Körper ist nur das kleinste aus einer riesigen
Palette von Beispielen dafür.
69
Index
Abbildung, 30
abgeschlossene Teilmenge, 53
abzählbar, 38
abzählbar unendlich, 38
Äquivalenz-Relation, 43
Äquivalenzklasse, 44
Algebra, 64
assoziative, 64
kommutative, 64
unitäre, 64
antisymmetrisch, strikt, 46
Automorphismus, 61
Beweis, indirekter, 18
Bijektion, 31
bijektiv, 31
Bild
einer Menge, 30
eines Elements, 30
Bildmenge, 30
charakteristische Funktion, 34
Definitionsbereich, 30
disjunkt, 33
Distributivgesetz
Links-, 63
Rechts-, 63
Doppelmagma, 64
Einheitengruppe, 55
Eins-Element, 64
Einschränkung, 31
Element von, 3
elementare Zeilenumformung, 20
Endomorphismus, 61
Epimorphismus, 61
Faktor
direkter, 60
Faktorgruppe, 56
Familie, 39
Folge
allgemeine, 39
Standard-, 39
Funktion, 30
gleichmächtig, 31
Gleichungssystem
homogenes, 15
inhomogenes, 15
Gruppe, 52
abelsche, 52
symmetrische, 52
Halbgruppe, 50
Hauptdiagonale (einer Matrix), 19
Hintereinanderausführung, 35
Homomorphismus, 61
idempotent, 54
Identität, 31
Indizierung, 39
injektiv, 31
inverses Element, 50
invertierbar, 50
isomorph, 61
Isomorphismus, 59, 61
kanonische Projektion, 34
70
Kette, 47
Kleiner-Relation, 41
Körper, 64
Komplement, mengentheoretisches, 26
komplexer Zahlkörper, 67
Komponente
eines Urpaars, 29
eines n-Tupels, 39
Komposition, 34
Kongruenz, 42
leere Menge, 18
Magma, 50
assoziatives, 50
kommutatives, 50
unitäres, 50
Matrix
(M × N)-, (m × n)-, 40
quadratische, 19
mengentheoretische Differenz, 26
Monoid, 50
Monomorphismus, 61
Nachbereich, 30
Negation, 7
neutrales Element, 49
nicht (log.), 7
Normalteiler, 56
Null-Element, 64
oder (log.), 8
Ordnung, 46
strikte, 46
teilweise, 47
Paar, geordnetes, 39
Partition, 33
Permutation, 52
Potenzmenge, 26
Produkt
cartesisches, 39
direktes, 59
reflexiv, 42
Relation, 41
Repräsentant, 44
Restriktion, 31
Ring, 64
Semigruppe, 50
Spalte einer Matrix, 40
Standardskalarprodukt, 48
Striktordnung, 46
lineare, 46
totale, 46
Summand
direkter, 60
Summe
direkte, 59
surjektiv, 31
symmetrisch, 42
TeilGruppe, 54
Halbgruppe, 54
Magma, 54
Monoid, 54
Teiler-Relation, 42
Teilmenge von, 7
Teilmengenfunktion, 32
Trägergruppe, 64
Trägermenge, 50
transitiv, 42
Tupel, 39
Umkehrfunktion, 36
Umkehrung, 32
und (log.), 7
UnterGruppe, 54
Halbgruppe, 54
Magma, 54
Monoid, 54
71
Urbild, vollständiges, 32
Urpaar, 29
vergleichbar, 46
Verknüpfung
assoziative, 49
auf einer Menge, 48
distributive, 63
kommutative, 49
zwischen Mengen, 48
Vorbereich, 30
Wertemenge, 30
Zeile einer Matrix, 40
Zeilenstufenform einer Matrix, 22
verfeinerte, 23
Zerlegung
2-teilige direkte, 60
triviale direkte, 60
72