AR-, MA- und ARMA-Prozeß weißes Rauschen random walk
Werbung

Stochastische Prozesse und Box-Jenkins Technik
Stichwörter:
AR-, MA- und ARMA-Prozeß
weißes Rauschen
random walk
Autokorrelations-Funktion
Stationarität
Invertierbarkeit
Korrelogramm
Box-Jenkins Technik
o1-15.tex/0
Stochastischer Prozeß
ist eine Folge {Yt, t = 1, . . . , n} von Zufallsvariablen Yt, die
in t = 1, . . . , n beobachtet werden.
Zeitreihe: eine Realisation von {Yt, t = 1, . . . , n}
Gemeinsame Verteilung der Yt
p(y1, . . . , yn)
Strenge Stationarität:
p(yt, . . . , yt+k ) = p(yt+s, . . . , yt+s+k )
für beliebige ganze Zahlen t, s und k > 0
schwache Stationarität:
µt = E{Yt} = E{Yt+s} = µt+s
γkt = Cov{Yt, Yt+k } = Cov{Yt+s, Yt+k+s} = γk,t+s
für beliebige ganze Zahlen t, s und k > 0
o1-15.tex/1
Autokorrelations-Funktion
γkt = Cov{Yt, Yt+k }
bei Stationarität:
γkt = γk
für beliebige ganze Zahlen t und k > 0
Symmetrie:
γ−k = Cov{Yt, Yt−k }
= Cov{Yt−k , Yt} = Cov{Yt, Yt+k } = γk
Autokorrelations-Funktion (ACF)
γk
ρk = , k = 0, ±1, . . . ,
γ0
mit γ0 = Cov{Yt, Yt} = Var{Yt}
empirische Autokorrelations-Funktion (Korrelogramm):
Pn−k
rk =
o1-15.tex/2
t=1
(yt − ȳ)(yt−k − ȳ)
Pn
2
t=1 (yt − ȳ)
AR(1)-Prozeß
Yt = ϕYt−1 + εt,
X i
=
ϕ εt−i
εt ∼ IID(0, σ 2)
i
Wenn
|ϕ| < 1
ergeben sich
σ2
Var{Yt} =
1 − ϕ2
ϕk
2
Cov{Yt, Y t − k} =
σ
1 − ϕ2
Man nennt |ϕ| < 1 die Stationaritäts-Bedingung
Autokorrelations-Funktion:
ρk = ϕk
für k = 0, ±1, . . .
o1-15.tex/3
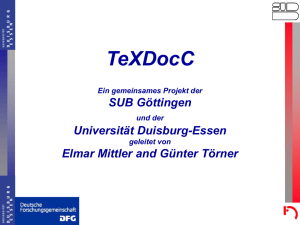
Einige Korrelogramme
o1-15.tex/4
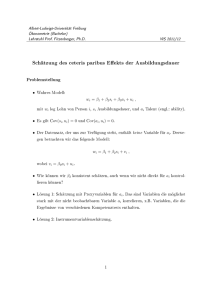
retail sales
o1-15.tex/5
retail sales, ACF
o1-15.tex/6
retail sales, ACF Forts.
o1-15.tex/7
MA(1)-Prozeß
Yt = εt − θεt−1,
εt ∼ IID(0, σ 2)
stets stationär
Momente:
• Var{Yt} = σ 2(1 + θ2)
• Cov{Yt, Yt−1} = −θσ 2 = Cov{Yt, Yt+1}
• für |k| > 1: Cov{Yt, Yt−k } = 0
• Autokorrelations-Funktion:
θ
− 1+θ
2 k = 1
ρk =
0
k>1
Invertierbarkeit, d.h., daß εt als Funktion von Yt−i, i ≥ 0,
darstellbar ist, setzt voraus, daß |θ| < 1:
Yt = +εt − θYt−1 − θ2Yt−2 − . . .
Voraussetzung: θs → 0 für s → ∞ oder |θ| < 1.
o1-15.tex/8
MA(q)-Prozeß
Yt = εt − θ1εt−1 − . . . − θq εt−q
= (1 − θ1L − . . . − θq Lq )εt = Θ(L)εt
mit εt ∼ IID(0, σ 2)
stets stationär
Autokorrelations-Funktion:
ρk =
P
q−k
θi θi+k
i=0
Pq
2
i=0 θi
0
k = 1, . . . , q
k>q
Invertierbarkeit setzt voraus, daß für alle Wurzeln zi aus
Θ(z) = 0 gilt:
|zi| > 1
In EViews: Inverted Roots kleiner als Eins!
o1-15.tex/9
Weißes Rauschen
Weißes Rauschen (white noise)
Yt = ε t ,
εt ∼ IID(0, σ 2)
können wir als MA(0)-Prozeß ansehen
Momente:
µ = 0
σ2 k = 0
γk =
0 k =
6 0
ρk =
1 k=0
0 k =
6 0
Weißes Rauschen ist ein stationärer Prozeß
o1-15.tex/10
AR(1)-Prozeß
Yt = ϕYt−1 + εt,
εt ∼ IID(0, σ 2)
oder
Yt − ϕYt−1 = (1 − ϕL)Yt = Φ(L)Yt = εt
Aus Yt =
P
iϕ
i
εt−i ergibt sich
|ϕ| < 1
als Stationaritäts-Bedingung
Yt ist stationär, wenn die Wurzel z1 aus Φ(z) = 0 erfüllt:
|zi| = |ϕ−1| > 1
Autokorrelations-Funktion:
ρk = ϕk
für k = 0, ±1, . . .
o1-15.tex/11
Der random walk
random walk Prozeß
Yt = Yt−1 + εt,
εt ∼ IID(0, σ 2)
Ist ein Spezialfall des AR(1)-Prozesses mit ϕ = 1
Momente:
µt = µt−1
Var{Yt} = Var{Yt−1} + σ 2 6= Var{Yt−1}
Yt ist nicht stationär (∆Yt ist stationär!)
Xt heißt integriert von der Ordnung 1 [Xt ∼ I(1)],
wenn Xt nicht stationär, aber ∆Xt stationär ist.
Yt heißt integriert von der Ordnung d, wenn Yt ∼ I(d), d.h.,
wenn ∆dYt stationär
zeigen Monatsdaten (Quartalsdaten) eine Saisonalität, so ist
oft eine Differenzenbildung mit ∆12 = 1 − L12 [∆4 = 1 − L4]
notwendig, um einen stationären Prozeß zu erhalten
o1-15.tex/12
AR(p)-Prozeß
Yt = ϕ1Yt−1 + . . . + ϕpYt−p + εt,
εt ∼ IID(0, σ 2)
Für γk = Cov{Yt, Yt−k } (und ρk ) ergibt sich eine Differenzengleichung für k = 1, 2, . . .
γk = ϕ1γk−1 + . . . + ϕpγk−p
(Yule-Walker Gleichungen)
Beispiel: p = 2
Yt = ϕ1Yt−1 + ϕ2Yt−2 + εt
Die Yule-Walker Gleichungen für die ρk , k = 1, 2, lauten
ρ1 = ϕ1 + ϕ2ρ1
ρ2 = ϕ1ρ1 + ϕ2
daraus folgt
ρ1 =
ϕ1
1 − ϕ2
ϕ21
ρ2 = ϕ2 +
1 − ϕ2
Allgemeine Lösung der Differenzengleichung
ρk = A1z1k + A2z2k
o1-15.tex/13
ARIMA-Prozesse
Der Prozeß {Yt, t = 1, . . . , n} mit
wt − ϕ1wt−1 − . . . − ϕpwt−p = δ + εt − θ1εt − . . . − θq εt−q
wobei wt = ∆dYt und εt ∼ IID(0, σ 2)
oder
Φ(L)wt = δ + Θ(L)εt,
εt ∼ IID(0, σ 2)
heißt ARIMA(p, d, q)-Prozeß. Gilt d = 0, so spricht man
von einem ARIMA(p, 0, q)- oder ARMA(p, q)-Prozeß.
Stationarität: Wurzeln zi aus Φ(z) = 0 erfüllen |zi| > 1
Invertibilität: Wurzeln zi aus Θ(z) = 0 erfüllen |zi| > 1
o1-15.tex/14
Stationarität und Invertibilität
o1-15.tex/15
Empirische Autokorrelations-Funktion
Beurteilung der Stationarität: Vergleich der empirischen Autokorrelations-Funktion mit theoretischer ACF
empirische Autokorrelations-Funktion:
P
ρ̂k = rk =
(Yt − Ȳ )(Yt+k − Ȳ )
,
P
(Yt − Ȳ )2
k = 0, ±1, . . .
rk wird auch Korrelogramm genannt
Es gilt (Bartlett, 1946)
q
1
X
Var{rk } =˙
1 + 2 ρ2i
n
i=1
für k > q, wenn ρj = 0 für alle j > q.
o1-15.tex/16
Box-Jenkins Technik
Verfahren zum Spezifizieren, Schätzen und Prüfen von Modellen für ARIMA-Modellen
1. Identifikation, d.i. das Festlegen von p, d, und q durch
Inspektion der Autokorrelations-Funktion und partiellen
Autokorrelations-Funktion
2. Schätzen der Parameter; nichtlineares Problem außer,
wenn q = 0
3. Diagnostische Prüfung des Modells durch Analyse der
Residua
et = Θ̂−1(L)[Φ̂(L)wt − δ̂]
mit wt = ∆dYt
Box-Pierce Test:
Q=n
K
X
ri2 ∼
˙ χ2(K − q − p)
mit
P
rk =
o1-15.tex/17
etet−k
e2t
P
Box-Jenkins Technik in EViews
ARMA(p, q)-Modell
Yt = β0 + ut
mit
ut = ϕ1ut−i . . . ϕput−p + εt − θ1εt − . . . − θq εt−q
1. Identifikation, d.i. das Festlegen von p und q mit Hilfe
von “View/Correlogramm...”
2. Schätzen in “Specify/Estimate” etc. mit
depvar c ar(1) ...ar(p) ma(1) ...ma(q)
3. Diagnostische Prfung mit Hilfe von “View/Correlogramm...”,
angewendet auf Residuen
ARIMA(p, d, q)-Modell: Identifikation von d (wie oben), Berechnung der Variablen d(depvar,d) und Schritte 2 und 3
wie oben
o1-15.tex/18