Bewegungen im Zentralfeld
Werbung

Ergänzungen zu Physik I
Bewegungen im Zentralfeld
Bewegungen im Zentralfeld
Wir wollen jetzt einige allgemeine Eigenschaften der Bewegung eines Massenpunktes unter dem Einfluss
einer Zentralkraft untersuchen, d.h. der Bewegung in einem Zentralfeld1 . Danach soll der spezielle Fall der
Planetenbewegung behandelt werden, der historisch eines der Hauptprobleme der Mechanik und speziell
der Himmelsmechanik war. Zentralbewegungen spielen jedoch in vielen Zweigen der Physik eine Rolle, so
z.B. bei Streuprozessen atomarer oder subatomarer Teilchen.
1. Reduktion des Zwei-Körper- auf ein Ein-Körper-Problem
Das Zentralkraftproblem mit zwei Körpern ist eines der wichtigen Probleme der Physik; es umfasst in
der Himmelsmechanik das Problem Erde - Sonne, in der Atomphysik das klassische Atommodell mit zwei
endlichen Massen und in der Quantenmechanik Streuprozesse atomarer Teilchen oder Elementarteilchen.
Es wird dabei angenommen, dass zwei Massenpunkte in gegenseitiger Wechselwirkung Zentralkräfte (z.B.
Gravitations- oder Coulombkräfte) aufeinander ausüben, die nur von den Relativkoordinaten ~r = ~r2 − ~r1
oder auch von deren zeitlichen Ableitungen ~r˙2 , ~r˙1 abhängen. Die kinetischen Energien und die Bewegungsgleichungen der beiden Massen sind
H
6
y
1
m1 w HH ~r
(1)
E1kin = m1~r˙12 und F~21 = +f (r)~r = m1~r¨1 ,
Y
H
H
H
2
~0 H gS HH
1
j
H
r 1 HH H
E2kin = m2~r˙22 und F~12 = −f (r)~r = m2~r¨2 .
(2)
j w
0 H
~
r
2
2
* m2
~r1 ~
Die Kraft ist anziehend, wenn f (r) > 0 ist, und abstossend,
R
wenn f (r) < 0 gilt. Sie kann durch ein Potential, das nur von
~r2
den Relativkoordinaten ~r = ~r2 − ~r1 abhängt, dargestellt werden:
F~ = −∇V ,
x
und mit
∂V (~r)
∂V (~r) ∂(~r2 − ~r1 )
∂V (~r)
=
=−
,
∂~r1
∂(~r2 − ~r1 )
∂~r1
∂(~r2 − ~r1 )
∂V (~r)
∂V (~r)
gilt für F~12 = −
und F~21 = −
:
∂~r1
∂~r2
F~12
∂V (~r)
∂V (~r) ∂(~r2 − ~r1 )
∂V (~r)
=
=
∂~r2
∂(~r2 − ~r1 )
∂~r2
∂(~r2 − ~r1 )
u
P
q F~12 m2
P
2
~
m
1
= −F21 ( actio=reactio“ ).
~21
i
P
F
Pu
”
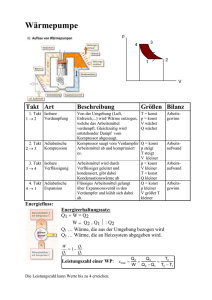
~ = (m1~r1 + m2~r2 )/(m1 +
Das System hat f = 6 Freiheitsgrade, z.B. 3 Komponenten für die Koordinate R
m2 ) des Schwerpunktes S und 3 Komponenten für die Relativkoordinate ~r = ~r2 − ~r1 . Die kinetische
Energie und die Kräfte können nun statt mit den Koordinaten ~r1 , ~r2 auch nur mit den Relativ- und
~ ausgedrückt werden. Wie sich der Skizze entnehmen lässt, ist
Schwerpunktskoordinaten ~r und R
~ − ~r m2 ,
~ + ~r m1 .
~r1 = R
(3)
~r2 = R
(4)
m1 + m2
m1 + m2
~¨ = p~˙ = 0, mit M = m1 + m2 gleich der
Und mit der Summe F~12 + F~21 = 0 = m1~r¨1 + m2~r¨2 folgt M R
r1 + m2~r2 gleich der Schwerpunktskoordinate. p~˙ = 0 bedeutet nichts anderes,
~ m1 ~
Gesamtmasse und R=
M
als dass der Gesamtimpuls p~ = m1~r˙1 + m2~r˙2 konstant ist. Multiplikation der Gleichungen (1) und (2)
mit m2 bzw. m1 sowie Subtraktion und Berücksichtigung des actio=reactio-Prinzips ergibt
m1 m2 (~r¨2 − ~r¨1 ) = m1 F~12 − m2 F~21 = (m1 + m2 ) F~12
| {z }
| {z }
M
~r¨
⇒
m1 · m2 ¨ ~
~r = F (~r) = µ~r¨ .
m1 + m2
| {z }
µ
(5)
1=
kugelsymmetrisches Kraftfeld
Erinnerung: Dieses hier beispielshaft nachgewiesene Prinzip (3. Newtonsches Gesetz) gilt nicht nur für Zentral-,
sondern ganz allgemein für alle zwischen zwei Körpern wirkenden Kräfte (vgl. Halliday, Kap. 5-7).
2 Zur
1
Ergänzungen zu Physik I
Bewegungen im Zentralfeld
Die obige Gleichung hat die Form des Newtonschen Gesetzes ausgedrückt in den Relativkoordinaten ~r
und der
m1 · m2
der beiden Körper des Systems.
(6)
reduzierten Masse
µ=
m1 + m2
Die Lösung der Gleichung (5) beschreibt also das System in den Relativkoordinaten ~r. Mit den Gleichungen (3) und (4) können sie in die ursprünglichen Koordinaten transformiert werden. Ist der Impuls
des Schwerpunktes zeitlich konstant und bewegt sich gleichförmig, kann er für die weitere Behandlung
weggelassen werden3 und nur die von ~r abhängigen Terme der Bewegungsgleichung müssen gelöst werden
(Separation der Schwerpunkts- und Relativkoordinaten). Natürlich muss dabei die spezielle Form von
f (r) bekannt sein.
Mit der reduzierten Masse wird das Zweikörperproblem auf ein einfacheres Einkörperproblem zurückgeführt. Mehrkörperprobleme mit mehr als zwei Massen können nur noch iterativ näherungsweise mit z.B.
S als Koordinatenursprung gelöst werden.
2. Konstanz des Drehimpulses
d2~r
= F~ (~r) = f (r) · ~r.
dt2
Da die Zentralkraft F~ = f (r)~r in Richtung des Ortsvektors weist (F~ k ~r), übt sie kein Drehmoment auf
den Massenpunkt aus:
~◦
dL
~τ◦ =
= ~r × F~ = 0.
(7)
dt
~ ◦ = konst.
Nach dem Drehimpulssatz folgt dann ohne äussere Kräfte: L
Mit Gl. (5) gilt µ
Bei einer Zentralbewegung ist der Drehimpuls konstant.
q
d
m
u
ϕ p~ =konst
~r
c
Auch für eine gleichförmige Bewegung mit F~ = 0 und ~τ◦ = 0 gilt
~◦
dL
= ~r × F~ = 0
dt
⇒
~ ◦ = konst.
L
Impuls und Drehimpuls sind erhalten.
~ ◦ | = L◦ = |~r × p~| = r · mv · sin ϕ = d · m · v; er hängt von der Wahl des
Der Betrag des Drehimpulses ist |L
~ ◦ = 0. L
~ ◦ ist also eine Konstante
Bezugspunktes ◦ ab: liegt dieser auf der Bahn, so ist d = 0 und damit L
~
der Bewegung. Da L◦ nach Grösse und Richtung konstant sein muss, ergeben sich zwei Konsequenzen:
~◦
L
6
1
c ~r
uµ
*
~r(t + dt) dA
~ d~r
-
~r(t)
~ ◦ = µ(~r × ~v ) = µ ~r × d~r/dt kann sich ~r nur in einer Ebene senkrecht zu
Wegen L
~ ◦ bewegen. Da aber L
~ ◦ raumfest ist, hat folglich auch die Bewegungsebene (mit
L
2 Freiheitsgraden) eine feste Orientierung im Raum.
~|
Die von ~r in der Zeit dt überstrichene infinitesimal kleine Dreiecksfläche ist | dA
= dA = 12 | ~r × d~r | (da | ~r × d~r | die Fläche des von ~r und d~r aufgespannten
Parallelogramms darstellt.)
~
~ = 0, d.h. ein Inertialsystem,
wählt häufig als Anfangsbedingungen für die Schwerpunktskoordinate dR/dt
= 0 und R
in dem der Schwerpunkt ruht.
3 Man
2
Ergänzungen zu Physik I
Bewegungen im Zentralfeld
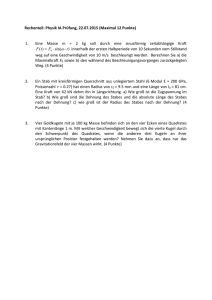
Also folgt der Keplersche Flächensatz:
~ ◦ | = µ|~r ×
|L
dA
d~r
| = 2µ
= konst.
dt
dt
dA 2
– Die pro Zeiteinheit überstrichene Fläche ist konstant.
dA 3
(8)
Bei der Zentralbewegung liegt der Ortsvektor
des Massenpunktes in einer raumfesten Ebene
und überstreicht in gleichen Zeiten gleiche Flächen.
dA 1
dA 4
Bei der Herleitung des Flächensatzes ist allgemein eine Zentralkraft vorausgesetzt worden und nicht
speziell die Gravitationskraft, er gilt also für alle Zentralkräfte.
Obwohl wir die Bahnkurve des Massenpunktes auf Grund der Bewegungsgleichung aus Gl. (5) für die
Relativkoordinaten berechnen könnten, ist es leichter, das Problem durch Kombination des Flächensatzes
mit dem (für Zentralkräfte gültigen) Energieerhaltungssatz zu lösen.
µ 2
v + V = E◦ = konst,
2
Zr
wobei die potentielle Energie V durch V (r) = − f (r) r dr
Der Energieerhaltungssatz lautet
∞
~ ◦ -Erhaltung), drücken wir die
gegeben ist, falls wir V (r → ∞) = 0 wählen. Da die Bahnkurve eben ist (L
4
Geschwindigkeit v durch ebene Polarkoordinaten aus:
y
6
µ
2
µ
1
u
ϕ
xp
r
Daraus folgt:
dr
dt
=
2
µ (E◦
− V ) − r2
dϕ
dt
2
"
dr
dt
2
+r
2
dϕ
dt
2 #
+ V = E◦ .
. Aus L◦ = µ | ~r × ~v |= µr2 dϕ
r × ~v | muss nur die
dt (für |~
senkrecht zu ~r stehende Koponente vϕ = r dϕ
v genommen werden) ergibt sich
dt von ~
L◦
dϕ
= 2,
dt
µr
(9)
und somit
dr
=
dt
s
2
(E◦ − V ) −
µ
L◦
µr
2
.
(10)
Dividieren wir die Gleichungen (9) und (10) um t zu eliminieren, so erhalten wir einen Zusammenhang
dϕ
dϕ
dt
dr
zwischen r und ϕ mit ( dϕ
dt )( dr ) = ( dt )/( dt ) = dr :
dϕ
=
dr
L◦
r
µr2
2
µ (E◦
−V)−
L◦
µr
2
–
die Gleichung der Bahnkurve.
(11)
Für eine Berechnung von r(ϕ) muss die Funktion V (r) bekannt sein, z.B. V (r) = −Γ Mrm .
4 In
2 (hergeleitet in den Kreisbewegungen“
den eckigen Klammern steht der Polarkoordinaten-Ausdruck für v 2 = vr2 + vϕ
”
auf S.4).
3
Ergänzungen zu Physik I
Bewegungen im Zentralfeld
3. Planetenbewegungen
Wir werden jetzt Gl. (11) für den Fall einer idealisierten Planetenbewegung lösen: M und m seien die
Massen der Sonne und eines Planeten.
Die Verteilung der Massen in beiden Körpern sei kugelsymmetrisch5 . Die reduzierte Masm
6
se6 ist
mM
µ=
.
~r
#
m+M
Die Bewegung dieses einen speziellen Planeten soll nicht durch die Anwesenheit anderer
M
Planeten gestört werden.
"!
Mit dem Gravitationspotential V (r) = −Γ mM
für die potentielle Energie wird die Bahnkurven-Gl. (11)
r
zu:
dϕ
L◦
r
.
=
dr
L◦ 2
µr2 µ2 E◦ + ΓmM
−
r
µr
Wir führen 1/r =: x als neue Variable ein, sodass dr = −dx/x2 gilt, und erhalten
dϕ = q
−L◦ /µ
2E◦
µ
+
=r
2E◦
µ
+
2ΓmM
x
µ
ΓmM
L◦
−
L2◦ 2
µ2 x
−L◦ /µ
2 r
dx = r − Lµ◦ x −
−L◦ /µ
2
2 dx
2E◦
ΓmM
ΓmM
+
+
L◦
µ
L◦
dx
−(L◦ x/µ−ΓmM/L◦ )2
2E◦
ΓmM 2
µ +( L◦ )
oder dϕ = √
+1
wenn wir nochmals eine neue Variable einführen: u := r
−du
,
1 − u2
(12)
L◦
µ x
2E◦
µ
− ΓmM
L◦
2 .
ΓmM
+ L◦
Integration von Gl. (12) liefert ϕ − ϕ◦ = arccos(u), oder, wenn wir ϕ◦ = 0 setzen,
cos(ϕ − ϕ◦ ) = cos ϕ = u.
(13)
Kehren wir in Gl. (13) wieder zur ursprünglichen Variablen r zurück, dann erhält man
s
2
L◦
2E◦
ΓmM
ΓmM
= cos ϕ
+
+
. Daraus kann die Bahnkurve des Planeten berechnet werden:
µr
µ
L◦
L◦
r=
1
L2◦
q
·
ΓmM µ 1 + cos ϕ 1 +
erhalten wir
r=
2E◦ L2◦
Γ2 µm2 M 2
p
1 + ε cos(ϕ)
–
.
L2◦
Mit den Abkürzungen p :=
, ε :=
ΓmM µ
s
1+
2E◦ L2◦
2
Γ µm2 M 2
die Gleichung eines Kegelschnittes in Polarkoordinaten.7
(14)
5 Abweichungen
von einer exakten Kugelsymmetrie z.B. von Sonne und Erde führen zu r−, ϑ−, ϕ−abhängigen Korrekturen
(Quadrupol-Terme).
6 In vielen Fällen ist m M und man kann für die reduzierte Masse µ ' m setzen. Sind jedoch beide Massen gleich,
wie in einigen Doppelsternsystemen oder beim Positronium dem e− e+ -Atom, dann rotieren beide Massen um ihren
gemeinsamen Schwerpunkt; es ist dann µ = m/2.
7 auch Polargleichung“ genannt – siehe Anhang am Ende für eine zweite Möglichkeit, zu ihr zu gelangen.
”
4
Ergänzungen zu Physik I
Bewegungen im Zentralfeld
P
a
r'
r
F2
F1
e
b
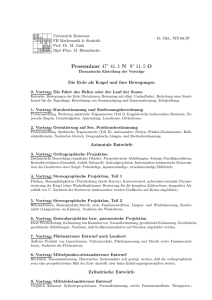
Gl. (14) ist die Gleichung eines Kegelschnittes, wenn der eine
Brennpunkt der Pol ist, von dem aus r gemessen wird, und ϕ
von dem Scheitel aus gemessen wird, der dem Pol am nächsten
ist. Die Abbildung links zeigt eine Ellipse. Allgemein gibt es
drei Arten von Kegelschnitten, die nach den Werte von ε, der
sogenannten Exzentrizität, unterschieden werden:
Die Fälle E◦ ≥ 0 entsprechen der ungebundenen Bewegung: der Himmelskörper kann das Sonnensystem
verlassen. Der Fall E◦ < 0 entspricht der eigentlichen, gebundenen Planetenbewegung. Den Wert der
Gesamtenergie E◦ findet man aus der direkt vor Gl.
(14) gegebenen Deklaration von ε.
ε = e/a
Kreis
Ellipse
Parabel
Hyperbel
0
<1
=1
>1
− µ2
ΓmM
L◦
E◦
2
<0
0
>0
Im Falle der gebundenen Planetenbewegung haben wir es also mit einer Ellipse zu tun.8 Die Gleichung
einer Ellipse lautet r + r0 = konst = 2a. (Vorstellung: Befestige die Enden einer Schnur der Länge 2a an
den Brennpunkten und führe einen darin eingespannten Bleistift im Kreis“ herum – so zeichnet sich eine
”
Ellipse.) Laut Kosinussatz ist r02 = r2 + 4e2 + 4er cos(ϕ) (vgl. Abb.). Indem man r0 eliminiert, ergibt sich
2
p
b /a
mit e2 = a2 − b2 und somit ε = a2 − b2 /a.
r=
1 + e/a cos ϕ
b2 /a = p nennt man den Parameter oder Scheitelkrümmungsradius.
Wir haben somit aus dem Gravitationsgesetz hergeleitet:
Das 1. Keplersche Gesetz
Die Planeten bewegen sich auf Ellipsen, in deren einem Brennpunkt die Sonne steht.
Das 2. Keplersche Gesetz ist der schon mit Gl. (8) formulierte Flächensatz.
Das 3. Keplersche Gesetz besagt:
Die Quadrate der Umlaufszeiten der Planeten verhalten sich zueinander wie die Kuben der grossen Achsen ihrer Bahnellipsen.
Zum Beweis führen wir im Flächensatz
dA
L◦
=
dt
2µ
die Ellipsenfläche
A = πab ein.
Ist T
2
4π 2 a2 µ2 aL2◦
4π 2 µ 3
=
a ,
L2◦
ΓmM µ
ΓmM
p2
wenn wir mit Hilfe der für Gl. (14) eingeführten Abkürzung9 für p noch b2 =
eliminieren.
a
die Umlaufszeit, so gilt
πab
L◦
=
und deshalb
T
2µ
2
T =
2πabµ
L◦
=
8 Vgl.
auch die Atomphysik (ã Coulombkraft): Hier beschreibt klassisch und quantenmechanisch E◦ < 0 ein im Coulombfeld gebundenes Elektron und E◦ > 0 ein am Atomkern gestreutes freies Elektron.
9 Es
war dies p =
L2
◦
.
ΓmM µ
5
Ergänzungen zu Physik I
Bewegungen im Zentralfeld
Johannes Kepler (1571-1630) leitete seine empirischen Gesetze aus den Daten von Tycho Brahe (15461601) ab, bevor das Newtonsche Gravitationsgesetz bekannt war. Diese Reihenfolge des Erkenntnisgewinns – zunächst empirische Beschreibung gefolgt von einer Parametrisierung der Daten, erst später
dann eine Erklärung durch entsprechende physikalische Gesetze – tritt in der Physik immer wieder auf.
Anhang: Bestimmung der Bewegungsgleichung durch Integration
Dies ist eine etwas aufwändigere Methode als die oben gewählte; ihre Anführung an dieser Stelle dient
bloss der Vollständigkeit:
Man multipliziert hierbei
m1 m2
m1~r¨ = p~˙ = −Γ 3 ~r
r
mit
~ und berücksichtigt das dreifache
×L
m1 m2
m1 m2
~
~
= −Γ 3
~r × L
[~r · (~r · p~) − p~ · r2 ]
= −Γ 3
p~˙ × L
| {z }
| {z }
|
{z
}
r
r
~
r
×
(~
r
×
p
~
)
d
˙
˙
~
r
·
(~
r
·
m
~
r
)
−
m
~
r
·
r2
~
p × L)
= (~
dt
d ~r
~r˙
d
1
~r · ~r˙
1
~r˙
√
= + ~r
= − ~r 3 = 3 [~r˙ r2 − ~r · (~r · ~r˙ )] für das Dreifachprodukt
2
dt r
r
dt
r
r
r
~r
d
~ = Γm21 m2 d ~r ⇒ p~ × L
~.
~ = Γm21 m2 ~r + C
ergibt sich
(~
p × L)
dt
dt r
r
Vektorprodukt
und mit
~ ist als Integrationskonstante der sogenannte Lenzsche Vektor, der in der festen Bewegungsebene liegt.
C
Multipliziert man die Gleichung mit ~r und setzt p := L2 /Γm21 m2 und ε := C/Γm21 m2 , erhält man:
~ =L
~ · (~r × p~) = L
~ ·L
~ = L2 = Γm2 m2 r + ~r · C
~
~r · (~
p × L)
1
|{z}
| {z
}
~r · ~r
r2 rC cos(ϕ)
=
r
r
⇒ r=
p
,
1 + ε cos(ϕ)
in Übereinstimmung mit der Fokaldarstellung der Kegelschnitte, Gl. (14).
6