Einführung in die Funktionentheorie
Werbung

Einführung in die Funktionentheorie
Jürgen Grahl, SS 2013
Version: 23. April 2013, Kapitel 1 bis 2
1
Inhaltsverzeichnis
Vorwort
1
Einleitung und Motivation
2
1 Wiederholungen und Ergänzungen zur Analysis: Komplexe Zahlen, Potenzreihen, zusammenhängende Mengen
3
1.1 Die komplexen Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2 Potenzreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.3 Elementare transzendente Funktionen . . . . . . . . . . . . . . . . . . . . . .
9
1.4 Wege, Wegzusammenhang und Zusammenhang . . . . . . . . . . . . . . . .
12
2 Holomorphe Funktionen
2.1 Komplexe Differenzierbarkeit
20
. . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.2 Der Zusammenhang von komplexer Differenzierbarkeit mit Differenzierbarkeit
im R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
2.3 Lokal konforme Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3 Cauchy’scher Integralsatz und Cauchy’sche Integralformel für sternförmige Gebiete
35
3.1 Komplexe Wegintegrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
3.2 Die Holomorphie von Potenzreihen und parameterabhängigen Integralen . .
40
3.3 Der Cauchy’sche Integralsatz für sternförmige Gebiete . . . . . . . . . . . . .
43
3.4 Die Umlaufszahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
3.5 Die Cauchy’sche Integralformel für sternförmige Gebiete . . . . . . . . . . .
57
4 Fundamentalsätze über holomorphe Funktionen
63
4.1 Das Identitätsprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.2 Das Maximum- und das Offenheitsprinzip . . . . . . . . . . . . . . . . . . .
66
4.3 Lokal injektive Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
4.4 Ganze Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
5 Die Riemann’sche Sphäre und Möbiustransformationen
80
5.1 Die Riemann’sche Sphäre . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
5.2 Möbiustransformationen und Automorphismengruppen . . . . . . . . . . . .
83
6 Isolierte Singularitäten und meromorphe Funktionen
91
6.1 Die globale Version des Cauchy’schen Integralsatzes und der Cauchy’schen
Integralformel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
6.2 Laurent-Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
2
Vorwort
Angesichts der Vielzahl an bereits vorhandenen hervorragenden Texten zu StandardVorlesungen wie der Einführung in die Funktionentheorie erscheint es mir nicht angezeigt,
bei der Konzeption einer solchen Vorlesung das Rad neu erfinden zu wollen. Ich habe mich
daher wesentlich an bereits vorhandenen Vorlagen orientiert, insbesondere an den Vorlesungsausarbeitungen von G. Köhler, S. Ruscheweyh, J. Steuding und D. Kraus, für deren
Überlassung ich diesen sehr verbunden bin, sowie an den Büchern von R. Remmert und K.
Fritzsche. Insofern beansprucht dieses Skript in keiner Weise Originalität. Ferner danke ich
Oliver Roth dafür, dass er mir den LaTeX-Quellcode und die Grafiken seiner Mitschrift der
Funktionentheorie-Vorlesungen von S. Ruscheweyh vom WS 1992/93 zur Verfügung gestellt
hat. Mehrere der Bilder und Formeln in diesem Skript sind hieraus entnommen.
Einige wenige Themen, die aus Zeitgründen nicht bzw. nur kursorisch in der Vorlesung behandelt werden konnten, sind durch Sternchen (∗) gekennzeichnet. Für das Verständnis der
übrigen Vorlesung sind diese Abschnitte nicht erforderlich, und sie sind auch für die Semesterabschlussklausur bzw. später für die mündlichen Prüfungen nicht relevant. Dennoch
empfehle ich, diese Inhalte in einer ruhigen Stunde (z.B. in den Semesterferien) im Selbststudium durchzuarbeiten.
Verweise der Form A.x.y beziehen sich auf mein Vorlesungsskript zur Analysis 1/2 und zur
Vertiefung Analysis im WS 2011/12, SS 2012 und WS 2012/13. Mit A.I.x.y, A.II.x.y bzw.
VAN.x.y verweise ich auf einzelne Aufgaben aus den Übungen zu diesen drei Veranstaltungen.
1
Einleitung und Motivation
Der Umgang mit komplexen Zahlen und den (differenzierbaren) Abbildungen zwischen ihnen bereitet vielen Anfängern sichtlich Unbehagen und Berührungsängste. Die folgenden
Argumente sollen einen Beitrag leisten, diese etwas zu entschärfen:
• Die Funktionentheorie benötigt kaum Methoden aus der (in der Vertiefung Analysis
behandelten) mehrdimensionalen Analysis, sondern ist vom Flair eher eine eindimensionale Theorie: Es wird lediglich“ der eindimensionale reelle Vektorraum R durch
”
den eindimensionalen komplexen Vektorraum C ersetzt.
An einigen wenigen Stellen werden wir zwar (hoffentlich erhellende) Querverbindungen
zur mehrdimensionalen reellen Differentialrechnung kennenlernen, diese spielen letztlich aber keine tragende Rolle: Für alle Resultate geben wir zumindest einen Beweis
an, der ohne die mehrdimensionale Differentialrechnung auskommt.
• Da die in der Funktionentheorie betrachteten Funktionen praktisch alle zumindest
stetig sind, können wir uns (jedenfalls im Rahmen dieser einführenden Vorlesung) völlig
auf den Riemann’schen Integralbegriff beschränken. Kenntnisse der Lebesgue-Theorie
sind nicht erforderlich (wenngleich die starken Konvergenzsätze der Lebesgue-Theorie
gelegentlich die Chance böten, die Argumentation zu vereinfachen.)
• Vom algebraischen Standpunkt aus mag man einem Körper, in dem man Wurzeln
aus negativen Zahlen ziehen kann, mit einem gewissen Misstrauen begegnen – das bis
zu einem gewissen Grad durchaus verständlich ist (und auch eine lange historische
Tradition hat, insofern als die Verwendung komplexer Zahlen über Jahrhunderte hinweg durchaus umstritten war). Vom geometrischen Standpunkt sollten die komplexen
Zahlen und die komplex differenzierbaren Funktionen aber alsbald ihren Schrecken
verlieren: Letztlich ist der Körper C nichts anderes als die Ebene R2 (die man allerdings mit einer zusätzlichen multiplikativen Struktur versieht). In gewissem Sinne
knüpft die Funktionentheorie an die in der Schulgeometrie der Mittelstufe behandelten
Ähnlichkeitstransformationen (Translationen, Drehstreckungen und Spiegelungen) der
Ebene an: Komplex differenzierbare Abbildungen verhalten sich lokal“, im Kleinen,
”
tatsächlich fast überall“ (genauer: abseits ihrer Ableitungsnullstellen) wie Ähnlich”
keitstransformationen, unter Ausschluss allerdings von Spiegelungen. Anders als in der
Schulgeometrie werden jedoch bei etwas globalerer Betrachtung Verzerrungseffekte relevant; diese rühren von den nichtlinearen Termen in der Taylor-Entwicklung dieser
Funktionen her.
• Der komplexe Differenzierbarkeitsbegriff ist deutlich stärker als der reelle, was dazu führt, dass viele aus dem Reellen bekannten pathologischen“ Phänomene in der
”
komplexen Analysis überhaupt nicht auftreten. Ganz anders als bei der reellen Differenzierbarkeit gilt beispielsweise, dass Funktionen, die auf einer offenen Menge einmal
komplex differenzierbar sind, dort bereits unendlich oft differenzierbar sind. Zwischen
den Funktionswerten komplex differenzierbarer Funktionen bestehen starke innere Bindungen, die es in dieser Form im Reellen nicht gibt. Sie sind es, die die eigentliche
Faszination der Funktionentheorie ausmachen.
2
1
Wiederholungen und Ergänzungen zur Analysis:
Komplexe Zahlen, Potenzreihen, zusammenhängende Mengen
In diesem Kapitel wiederholen wir einige aus der Analysis bekannte Grundtatsachen, die
für die Funktionentheorie von besonderer Bedeutung sind, und beschäftigen uns mit dem
Konzept des zusammenhängenden metrischen Raumes.
1.1
Die komplexen Zahlen
Die erste Motivation zur Einführung komplexer Zahlen bestand darin, dass die Gleichung
x2 + 1 = 0
keine Lösung in R besitzt. Diesem Missstand hilft man durch Einführung der sog. imaginären
Einheit i ab, die diese Gleichung löst. Allerdings kann man i nicht kurzerhand als Lösung
dieser Gleichung definieren“, sondern man muss zeigen, dass eine solche Lösung in einer
”
geeigneten Obermenge von R – in der man zudem vernünftig“ rechnen können soll, die also
”
möglichst die Struktur eines Körpers tragen soll – existiert.
Formal kann das dadurch geschehen, dass man den Vektorraum R2 mit einer zusätzlichen
multiplikativen Struktur versieht, indem man nämlich
(a, b) · (c, d) := (ac − bd, ad + bc)
für alle (a, b), (c, d) ∈ R2
setzt. Man kann dann nachweisen, dass R2 hiermit zu einem Körper wird (Satz A.3.1). Er
heißt der Körper der komplexen Zahlen und wird mit C bezeichnet.
In diesem Körper findet“ man die reellen Zahlen wieder, wenn man das Element (a, 0) ∈ R2
”
mit der reellen Zahl a identifiziert. Wesentlich hierbei ist, dass die Rechenoperationen in R
und C miteinander verträglich sind: Es gilt
(a, 0) + (b, 0) = (a + b, 0),
(a, 0) · (b, 0) = (ab, 0)
für alle a, b ∈ R. In diesem Sinne ist R in C enthalten, und R wird zu einem Teilkörper von
C. Setzen wir nun
i := (0, 1) ,
so folgt i2 = (−1, 0) = −1. Damit haben wir in C die gewünschte Lösung i der Gleichung
x2 + 1 = 0 gefunden. Wir nennen i die imaginäre Einheit. Selbstverständlich gilt auch
(−i)2 = −1. Für beliebige a, b ∈ R folgt nun
(a, b) = (a, 0) + (0, b) = (a, 0) + (b, 0) · (0, 1) = a + bi.
Das rechtfertigt die übliche Notation
a + bi
für komplexe Zahlen, die von jetzt an anstelle der (für konkrete Rechnungen wenig praktikablen) Schreibweise (a, b) benutzt wird.
Auf den ersten Blick mag sich die Frage stellen, was mit einer solchen Erweiterung von R,
die zunächst nur die Lösung einer ganz speziellen Gleichung erlaubt, gewonnen ist. Denn
3
natürlich kann man sich viele andere Gleichungen ausdenken, von denen a priori zu befürchten ist, dass sie in C ebenso unlösbar sind wie in R, so dass man C immer weiter vergrößern
müsste, um auch diese Gleichungen lösen zu können. Tatsächlich stellt sich jedoch heraus,
dass in C bereits alle Polynomgleichungen lösbar sind, so dass solche zusätzlichen Erweiterungsschritte unnötig sind. Dies ist der Inhalt des berühmten Fundamentalsatzes der Algebra.
Dieser war in Satz A.12.27 mit Methoden der reellen Analysis bewiesen worden. Wir werden
in Satz 4.29 sehen, wie sich dieser Satz mit funktionentheoretischen Methoden wesentlich
eleganter beweisen lässt.
Der Preis für die Lösbarkeit der Gleichung x2 + 1 = 0 besteht allerdings darin, dass C nicht
zu einem geordneten Körper gemacht werden kann.
Wir verzichten darauf, die in den Körperaxiomen enthaltenen Rechenregeln“ für komple”
xe Zahlen in ermüdender Vollständigkeit aufzulisten. Hingegen lohnt es sich, einige für C
eigentümliche Begriffe und die zugehörigen Rechenregeln zu notieren:
Definition 1.1 Es seien a, b ∈ R und z = a + bi. Dann heißt a = Re (z) der Realteil und
b = Im(z) der Imaginärteil der komplexen Zahl z. Man setzt
z := a − bi
und nennt z die zu z konjugiert komplexe Zahl. Es ist
z · z = (a + bi)(a − bi) = a2 + b2
eine reelle Zahl und nicht negativ, und für z 6= 0 ist z · z > 0. Man definiert
|z| :=
√
zz
und nennt diese reelle Zahl |z| ≥ 0 den (Absolut-)Betrag der komplexen Zahl z.
Satz 1.2 (Rechenregeln in C)
z = z,
Für alle z, w ∈ C gilt
z +w = z +w,
1
Re (z) = (z + z) ,
2
| Re (z)| ≤ |z|,
Das Inverse z −1 =
1
z
zw = z · w,
Im(z) =
| Im(z)| ≤ |z|,
1
(z − z),
2i
|zw| = |z| · |w|,
|z| = |z|.
einer komplexen Zahl z 6= 0 ist
z
1
= 2.
z
|z|
Beweis. Satz A.3.3
4
Im(z)
6
z = a + bi
bi
i
a
0
1
- Re (z)
z = a − bi
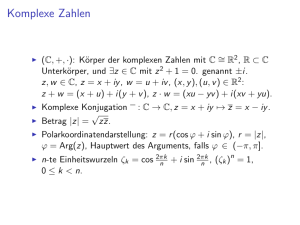
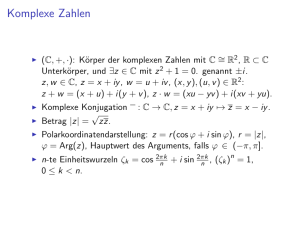
Abbildung 1: Geometrische Interpretation der komplexen Konjugation
Bemerkung 1.3 (Kartesische Koordinaten und Polarkoordinaten) Gemäß der
Konstruktion von C kann man sich die komplexe Zahl z = a + bi (mit a, b ∈ R) als Punkt
(a, b) in der Ebene R2 veranschaulichen. In diesem Zusammenhang nennt man R2 auch die
komplexe Zahlenebene bzw. zu Ehren von Gauß die Gauß’sche Zahlenebene. Die Darstellung z = a + bi für komplexe Zahlen ist dann die aus dem R2 vertraute Darstellung von
Vektoren in kartesischen Koordinaten.
Die komplexe Konjugation lässt sich geometrisch als Achsenspiegelung an der reellen Achse
interpretieren (Abbildung 1).
√
Auch der Betrag |z| = a2 + b2 von z hat in der Zahlenebene eine einfache anschauliche
Bedeutung: Er ist aufgrund des Satzes von Pythagoras der euklidische Abstand des Punktes
z vom Nullpunkt.
Die Addition komplexer Zahlen z und w entspricht der Addition von Vektoren im R2 (Abbildung 2 (a)).
Im(z)
Im(z)
6
6
z+w
z·w
w
w
z
z
-
Re (z)
-
Re (z)
Abbildung 2: Geometrische Interpretation der (a) Addition und (b) Multiplikation in C
5
Die geometrische Bedeutung der Multiplikation komplexer Zahlen ist weniger offensichtlich.
Sie erschließt sich jedoch durch die Einführung von Polarkoordinaten (vgl. Bemerkung
A.12.24): Wie in Korollar A.12.22 gezeigt, kann man jede komplexe Zahl z in der Form
z = reit
mit einem r ≥ 0 und einem t ∈ [0, 2π[ darstellen, wobei |eit | = 1 ist. Daher ist r = |z| der
Betrag von z. Aufgrund der in Satz A.12.14 (2) bewiesenen Formel von Euler-Moivre
eit = cos t + i sin t
erweist sich t hierbei als der Winkel, den z (als Vektor im R2 aufgefasst) mit der positiven
reellen Achse einschließt (vgl. Abbildung 3). Man nennt t auch das Argument von z und
schreibt t = arg(z); hierbei ist zu beachten, dass das Argument nur modulo 2π, d.h. bis auf
ganzzahlige Vielfache von 2π eindeutig ist.
eit
1
t
sin t
cos t
Abbildung 3: Zur Formel von Euler-Moivre
Nun gilt nach dem Additionstheorem der Exponentialfunktion
eis eit = ei(s+t)
für alle s, t ∈ R. Für das Produkt zweier komplexer Zahlen z = r1 eit1 und w = r2 eit2 ergibt
sich damit
z1 z2 = (r1 r2 ) · ei(t1 +t2 ) .
Hierbei ist r1 r2 der Betrag und t1 +t2 das Argument von zw. Dies kann man so interpretieren:
Bei der Multiplikation komplexer Zahlen multiplizieren sich die Beträge, und die Winkel
addieren sich (Abbildung 2 (b)).
Abschließend noch einige Worte zur topologischen Struktur von C: Sie stimmt mit der topologischen Struktur des R2 , d.h. der uns wohlvertrauten Ebene überein; der Betrag |z − w| ist
gerade der (euklidische) Abstand der Punkte z und w (aufgefasst als Vektoren im R2 ).
Durch
d(z, w) := |z − w|
6
ist dann eine Metrik d auf C, die euklidische Metrik, definiert. Bezüglich dieser ist C
(ebenso wie der R2 ) vollständig, d.h. jede Cauchy-Folge in C ist konvergent.
Dabei lässt sich die Konvergenz von Folgen komplexer Zahlen prinzipiell auf die Konvergenz
reeller Folgen zurückführen (Satz A.5.16 (c)): Eine Folge (zn )n in C konvergiert genau dann,
wenn die beiden Folgen (Re zn )n und (Im zn )n in R konvergieren. In diesem Fall gilt
lim zn = lim Re zn + i · lim Im zn .
n→∞
Definition 1.4
n→∞
n→∞
Ist z ∈ C und A eine nichtleere Teilmenge von C, so setzen wir
dist (z, A) := inf {|z − a| : a ∈ A}
und nennen dist (z, A) den Abstand des Punktes z von der Menge A. Analog definieren
wir den Abstand zweier nichtleerer Mengen A, B ⊆ C durch
dist (A, B) := inf {|a − b| : a ∈ A, b ∈ B} .
Man beachte, dass dist (A, B) = 0 sein kann, auch wenn A und B zueinander disjunkt sind.
Selbst zwei abgeschlossene disjunkte Mengen können den Abstand 0 voneinander haben. Falls
jedoch A abgeschlossen und B kompakt ist (oder umgekehrt), so kann man aus A ∩ B = ∅
auf dist (A, B) > 0 schließen (Aufgabe A.I.12.4).
Notationen: Die offene bzw. abgeschlossene Kreisscheibe mit Mittelpunkt a ∈ C und Radius
r ≥ 0 bezeichnen wir stets mit
Ur (a) := {z ∈ C : |z − a| < r}
Br (a) := Ur (a) = {z ∈ C : |z − a| ≤ r} .
bzw.
Für r = ∞ ist hierbei unter Ur (a) bzw. Br (a) die gesamte komplexe Ebene zu verstehen.
Von besonderer Bedeutung in der Funktionentheorie sind die offene Einheitskreisscheibe
(kurz: der Einheitskreis)
D := U1 (0) = {z ∈ C : |z| < 1}
und allgemeiner die offene Kreisscheibe Dr := Ur (0) vom Radius r um den Nullpunkt.
Eine wichtige Rolle als Definitionsgebiete holomorpher Funktionen spielen außerdem die
offene linke, rechte, obere und untere Halbebene, die wir mit LH, RH, OH und UH
bezeichnen:
LH := {z ∈ C | Re z < 0} ,
RH := {z ∈ C | Re z > 0} ,
OH := {z ∈ C | Im z > 0} ,
UH := {z ∈ C | Im z < 0} .
Schließlich ist es gelegentlich bequem, die Intervallschreibweise auf beliebige Strecken in C
zu übertragen und
[z, w] := {(1 − λ)z + λ · w : 0 ≤ λ ≤ 1}
für beliebige z, w ∈ C zu setzen. Es ist dann [z, w] die Strecke in C von z nach w.
7
1.2
Potenzreihen
Definition 1.5
Es sei z0 ∈ C und (an )n≥0 eine Folge in C. Dann heißt die Reihe
∞
X
n=0
an (z − z0 )n
eine Potenzreihe. Man nennt z0 den Entwicklungspunkt und die Zahlen an die Koeffizienten dieser Potenzreihe.
Potenzreihen haben ein sehr übersichtliches und angenehmes Konvergenzverhalten, das zumindest grob durch eine einzige Zahl, den Konvergenzradius beschrieben werden kann:
Satz 1.6 (Konvergenz von Potenzreihen)
Für jede Potenzreihe
ein eindeutig bestimmtes R ∈ [0, ∞] mit den folgenden Eigenschaften:
P∞
n=0
an z n gibt es
(1) Die Potenzreihe ist in jedem Punkt z ∈ C mit |z| < R konvergent und in jedem Punkt
z ∈ C mit |z| > R divergent.
(2) Ist 0 < r < R, so ist die Potenzreihe
Kreisscheibe Br (0) gleichmäßig
P auf der kompakten
n
|a
|
·
|z|
(bei
der
es sich nicht um eine Potenzkonvergent, und auch die Reihe ∞
n
n=0
reihe handelt!) ist auf jeder solchen Kreisscheibe gleichmäßig konvergent.
(3) Im Falle R > 0 wird durch
f (z) :=
∞
X
an z n
n=0
eine stetige Funktion f : UR (0) −→ C auf der offenen Kreisscheibe UR (0) in C definiert.
Die Größe R heißt der Konvergenzradius der Potenzreihe, und die Kreisscheibe UR (0)
heißt ihr Konvergenzkreis.
Beweis. Satz A.11.13. Der Beweis fußt auf dem Weierstraßschen Majorantenkriterium und
dem Konvergenzverhalten der geometrischen Reihe.
Über die Konvergenz in den Randpunkten des Konvergenzkreises ist hingegen keine allgemeine Aussage möglich, wie man z.B. anhand der Potenzreihen
f0 (z) :=
∞
X
n=1
zn ,
f1 (z) :=
∞
X
1 n
z ,
n
n=1
f2 (z) :=
∞
X
1 n
z .
2
n
n=1
sieht.
Warnung: Die Konvergenz einer Potenzreihe ist i. Allg. nicht gleichmäßig im Konvergenzkreis, sondern nur gleichmäßig auf kompakten Kreisscheiben in dessen Innerem. (Man spricht
hier auch von lokal gleichmäßiger Konvergenz.)
Rand hin wird die Konvergenz i.Allg.
P∞ 1 Zum
n
schlechter“. (Das Beispiel der Reihe
zeigt allerdings, dass gelegentlich doch
n=1 n2 z
”
gleichmäßige Konvergenz auf dem ganzen Konvergenzkreis vorliegen kann.)
Der folgende Satz stellt zwei probate Formeln bereit, mit deren Hilfe man den Konvergenzradius von Potenzreihen berechnen kann.
8
Satz 1.7
(a)
Es sei
P∞
n=0 an z
n
eine Potenzreihe und R ihr Konvergenzradius. Dann gilt:
p
1
= lim sup n |an |.
R
n→∞
(b) Falls der (eigentliche oder uneigentliche) Grenzwert
an lim n→∞ an+1 existiert, so ist er gleich R.
Beweis. Sätze A.11.15 und A.11.21
Aus Satz A.20.12 ist bekannt, dass man reelle Potenzreihen gliedweise differenzieren darf.
Eine entsprechende Aussage gilt auch in der komplexen Analysis. Wir können sie allerdings
nicht einfach aus der reellen Analysis übertragen, denn der komplexe Differenzierbarkeitsbegriff ist ein anderer als der reelle. Wir werden hierauf in Satz 3.11 zurückkommen.
Aus der reellen Analysis übernehmen können wir eine Bezeichnung für Funktionen, die lokal
als Potenzreihen darstellbar sind.
Definition 1.8 Es sei D ⊆ C offen und nicht-leer. Eine Funktion f : D −→ C heißt
analytisch, wenn sie um jeden Punkt von D in eine Potenzreihe (mit Koeffizienten
in C)
P∞
entwickelbar ist. Dies bedeutet, dass zu jedem z0 ∈ D eine Potenzreihe n=0 an (z − z0 )n
mit Konvergenzradius R > 0 gibt, so dass
f (z) =
∞
X
n=0
an (z − z0 )n
für alle z ∈ D ∩ UR (z0 )
gilt.
Selbstverständlich hängen hierbei der Konvergenzradius R und die Koeffizienten an vom
Entwicklungspunkt z0 ab.
1.3
Elementare transzendente Funktionen
In diesem Abschnitt stellen wir die aus der Analysis bekannten Eigenschaften der wichtigsten elementaren transzendenten Funktionen, d.h. der Exponentialfunktion, der trigonometrischen Funktionen Sinus und Cosinus sowie der Hyperbelfunktionen Sinus hyperbolicus und
Cosinus hyperbolicus zusammen.
Ausgangspunkt für alles weitere ist die Definition der Exponentialfunktion exp : C −→ C
über die in ganz C konvergente Exponentialreihe (Definition A.7.33)
∞
X
1 k
·z
exp(z) = e :=
k!
k=0
z
9
für alle z ∈ C
und der Nachweis des Additionstheorems
exp(z + w) = exp z · exp w
für alle z, w ∈ C,
aus dem sich u.a. die Nullstellenfreiheit der Exponentialfunktion ergibt.
Die Funktionen sin, cos, sinh, cosh : C −→ C werden dann definiert durch
1 iz
1 iz
sin(z) :=
e − e−iz
cos(z) :=
e + e−iz ,
2i
2
1 z
1 z
sinh(z) :=
e − e−z ,
cosh(z) :=
e + e−z
2
2
für alle z ∈ C. Sie heißen der Sinus, der Cosinus, der Sinus hyperbolicus und der
Cosinus hyperbolicus.
Ihr wichtigsten Eigenschaften sind in den folgenden Sätzen zusammengestellt (Satz A.12.14,
Satz A.12.20 und Korollar A.12.22):
Satz 1.9
Die trigonometrischen Funktionen und die Hyperbelfunktionen haben die folgenden Eigenschaften: Für alle z ∈ C gilt
(1)
cosh(−z) = cosh(z),
sinh(−z) = − sinh(z),
cos(−z) = cos(z),
sin(−z) = − sin(z),
d.h. cos und cosh sind gerade, sin und sinh ungerade Funktionen.
(2)
cosh(iz) = cos(z),
sinh(iz) = i · sin(z),
(3)
eiz = cos(z) + i sin(z)
ez = cosh(z) + sinh(z).
(Formel von Euler-Moivre),
(4)
cosh2 (z) − sinh2 (z) = 1,
cos2 (z) + sin2 (z) = 1.
Die zweite Beziehung bezeichnet man auch als trigonometrischen Pythagoras.
(5) Es bestehen die auf ganz C gültigen Potenzreihenentwicklungen
cos(z) =
∞
X
(−1)n z 2n
n=0
cosh(z) =
∞
X
n=0
(2n)!
,
sin(z) =
∞
X
(−1)n z 2n+1
n=0
z 2n
,
(2n)!
sinh(z) =
∞
X
n=0
(2n + 1)!
z 2n+1
,
(2n + 1)!
(6) Für alle z, w ∈ C gelten die Additionstheoreme
cos(z + w) = cos(z) cos(w) − sin(z) sin(w),
sin(z + w) = sin(z) cos(w) + cos(z) sin(w),
cosh(z + w) = cosh(z) cosh(w) + sinh(z) sinh(w),
sinh(z + w) = sinh(z) cosh(w) + cosh(z) sinh(w).
10
.
Satz 1.10
(1) Die Funktionen exp, cos und sin sind periodisch. Die sämtlichen Perioden von exp sind
die Zahlen 2kπi mit k ∈ Z, und das sind die sämtlichen Stellen, an denen exp den Wert
1 annimmt. Für reelle x und y gilt
|ex+iy | = ex .
Die sämtlichen Perioden von Cosinus und Sinus sind die Zahlen 2kπ mit k ∈ Z, und
zwar sowohl für cos, sin : R −→ R als auch für cos, sin : C −→ C.
(2) Für alle z ∈ C gilt
π
cos z +
= − sin z,
2
π
= cos z,
sin z +
2
cos(z + π) = − cos z,
sin(z + π) = − sin z.
(3) Der Sinus hat in C genau die (reellen) Nullstellen kπ mit k ∈ Z.
Der Cosinus hat in C genau die (reellen) Nullstellen
π
2
+ kπ mit k ∈ Z.
Satz 1.10 (1) enthält insbesondere die Beziehung
|ez | = eRe z
für alle z ∈ C,
die sich im Folgenden immer wieder als nützlich erweisen wird.
Korollar 1.11
(a) Für jede reelle Zahl a wird das Intervall [a, a + 2π[ durch x 7→ eix bijektiv und stetig
auf die Einheitskreislinie in C abgebildet.
(b) Für jede reelle Zahl a wird der horizontale Streifen {z ∈ C | a ≤ Im(z) < a + 2π}
durch z 7→ ez bijektiv und stetig auf die punktierte Ebene C \ {0} abgebildet.
Aus der Formel von Euler-Moivre und aus Korollar 1.11 (a) ergibt sich insbesondere die
bereits in Bemerkung 3.4 diskutierte Polarkoordinatendarstellung z = |z| · ei arg(z) komplexer
Zahlen. Als Folgerung hieraus erhält man u.a. das folgende Resultat:
Lemma 1.12 (Einheitswurzeln)
Es sei n ∈ N. Die Gleichung z n − 1 = 0 hat in C die
n verschiedenen Lösungen
2πik
mit k ∈ {0, 1, . . . , n − 1}.
zk = exp
n
Für jede komplexe Zahl a 6= 0 gibt es n verschiedene Lösungen der Gleichung z n = a in C.
Die Lösungen zk der Gleichung z n −1 = 0 bilden die auf der Einheitskreislinie gelegenen Ecken
eines regelmäßigen n-Ecks. Deswegen nennt man z n − 1 = 0 eine Kreisteilungsgleichung,
und die Lösungen zk = exp(2πik/n) heißen n-te Einheitswurzeln.
11
e2πi/7
1
Abbildung 4: 7-te Einheitswurzeln
1.4
Wege, Wegzusammenhang und Zusammenhang
Ein wichtiges Resultat der eindimensionalen reellen Analysis war der Zwischenwertsatz, demzufolge Intervalle durch stetige reellwertige Funktionen wieder auf Intervalle abgebildet werden. Hierbei waren die Intervalle genau die (im naiven Sinne) zusammenhängenden“ Men”
gen. Der Versuch, den Zwischenwertsatz in einen allgemeineren Kontext zu übertragen, führt
daher in natürlicher Weise auf die Frage, wie man die Vorstellung einer zusammenhängen”
den Menge“ präzisieren kann. Dass eine Menge zusammenhängend ist, bedeutet anschaulich,
dass man jeden Punkt in der Menge von jedem anderen aus erreichen“ kann, d.h. dass sich
”
je zwei Punkte in der Menge durch einen in der Menge verlaufenden Weg verbinden lassen1 .
Auf genau diese Weise werden wir den sog. Wegzusammenhang definieren. Vorher erinnern
wir an die Definition von Wegen und führen bei dieser Gelegenheit auch gleich den später
eminent wichtigen Begriff des Integrationsweges ein.
Definition 1.13
(a) Es sei X ein beliebiger metrischer Raum. Jede stetige Abbildung γ : [a, b] −→ X eines
kompakten Intervalls [a, b] nach X heißt ein Weg in X. Die Bildmenge
Spur (γ) := γ([a, b]) = {γ(t) | a ≤ t ≤ b} ⊆ X
heißt die Spur des Weges γ. (Weitere geläufige Notationen sind z.B. T (γ) oder
tr(γ).)
Weiter heißen γ(a) der Anfangspunkt und γ(b) der Endpunkt des Weges γ. Im
Falle γ(a) = γ(b) heißt γ ein geschlossener Weg.
(b) Nun sei speziell X = C.
Ein Weg γ : [a, b] −→ C heißt differenzierbar in t0 ∈ [a, b], wenn der Grenzwert
lim
t→t0
γ(t) − γ(t0 )
=: γ ′ (t0 )
t − t0
1
So ist etwa das Staatsgebiet der USA nicht zusammenhängend, da man z.B. Alaska von Kalifornien aus
nicht erreichen kann, ohne die USA zu verlassen.
12
existiert. In diesem Falle nennt man γ ′ (t0 ) den Tangentialvektor von γ zum Parameterwert t0 . Offensichtlich ist die Differenzierbarkeit von γ in t0 äquivalent damit,
dass Re γ und Im γ differenzierbar in t0 sind.
Ein Weg γ : [a, b] −→ C in C heißt ein Integrationsweg, wenn γ stückweise stetig
differenzierbar ist, wenn es also eine Zerlegung a = t0 < t1 < · · · < tN = b von [a, b]
gibt, so dass γ auf jedem Intervall [tν−1 , tν ] stetig differenzierbar ist. Insbesondere sollen
die einseitigen Ableitungen γ ′ (tν −) (für ν ≥ 1) und γ ′ (tν −) (für ν ≤ N − 1) existieren;
sie müssen jedoch nicht gleich sein.
Ein Weg γ : [a, b] −→ C in C heißt glatt (oder regulär), falls γ stetig differenzierbar
ist mit γ ′ (t) 6= 0 für alle t ∈ [a, b]. Insbesondere ist jeder glatte Weg ein Integrationsweg.
Ein geschlossener Weg γ : [a, b] −→ C, der auf [a; b[ injektiv ist, heißt ein JordanWeg2 .
10
5
5
-5
10
15
-5
15
10
10
5
5
5
-5
10
5
15
10
15
20
25
-5
-5
-10
-10
-15
Abbildung 5: Oben: ein Integrationsweg (links) und ein glatter Weg (rechts); unten: ein geschlossener glatter Weg (links) und ein (nicht-glatter) Jordan-Weg (rechts)
2
In Anbetracht von Satz A.13.28 können wir Jordan-Wege auch als homöomorphe Abbildungen der
Einheitskreislinie S 1 definieren.
13
Beispiel 1.14
von Wegen.
Abbildung 5 zeigt einige typische Beispiele der soeben definierten Klassen
Ein Integrationsweg kann Knicke“ haben, z.B. an den Parameterstellen, an denen die links”
und rechtsseitigen Ableitungen nicht übereinstimmen. Aber selbst bei stetig differenzierbaren
Wegen können solche Knicke auftreten, wie etwa die (aus Beispiel A.22.7 bekannte) sog.
Neilsche Parabel zeigt, die durch
γ(t) := (t2 , t3 ),
t ∈ R,
parametrisiert wird (Abbildung 64): Der Weg γ ist stetig differenzierbar mit γ ′ (t) = (2t, 3t2 ).
Es ist γ ′ (0) = (0; 0). Dem Parameterwert t = 0 entspricht eine Spitze“ in (0, 0); diese rührt
”
- anschaulich gesprochen - daher, dass die Bewegung im Punkt (0; 0) für einen (infinitesimal
kurzen) Moment zur Ruhe kommt und daher dort ihre Richtung wechseln kann.
Abbildung 6: Die Neilsche Parabel
Bei glatten Wegen sind solche Spitzen und Knicke nicht möglich: Die Forderung, dass γ ′ nir′ (t)
gends verschwindet, stellt sicher, dass der Tangenteneinheitsvektor |γγ ′ (t)|
stetig von t abhängt,
und garantiert damit einen glatten“ Kurvenverlauf.
”
Andererseits wäre es für die Zwecke der Funktionentheorie zu einschränkend, lediglich glatte
Wege zu betrachten, da man z.B. auch längs der Ränder von Dreiecken, Rechtecken etc.
integrieren will, die nicht als Spuren glatter Wege darstellbar sind. Daher ist der Begriff des
Integrationsweges gerade der für die Funktionentheorie angemessene.
Definition 1.15 Ein metrischer Raum X heißt wegzusammenhängend, falls es zu je
zwei Punkten a, b ∈ X einen Weg γ : [0, 1] −→ X in X mit Anfangspunkt γ(0) = a und
Endpunkt γ(1) = b gibt (also einen Weg, der a und b verbindet).
In manchen Beweisen ist allerdings ein anderer, etwas abstrakterer Zusammenhangsbegriff
nützlich, der sich freilich in dem für uns relevanten Kontext offener Teilmengen von C als
äquivalent zum Begriff des Wegzusammenhangs erweist.
14
Definition 1.16 Ein metrischer Raum X heißt zusammenhängend, wenn es keine Zerlegung X = A ∪ B von X in zwei offene, disjunkte, nichtleere Teilmengen A und B gibt.
Warnung 1: Will man diese Definition auf Teilmengen von C (oder allgemeiner des Rn )
anwenden, so muss man beachten, dass Offenheit bezüglich der Relativtopologie zu verstehen
ist (vgl. Bemerkung A.13.38). Beispielsweise lässt sich die Menge X := {1; 2} nicht disjunkt
in zwei in C offene Mengen zerlegen (sonst wäre X selbst offen). Dennoch ist X nicht
zusammenhängend, denn X = {1}∪{2} ist eine Zerlegung von X in zwei nichtleere, disjunkte
Mengen, die in der Relativtopologie von X offen sind.
Warnung 2: Vom Begriff des Zusammenhangs ist der des einfachen Zusammenhangs zu
unterscheiden, den wir in Definition 10.7 kennenlernen werden.
Proposition 1.17
ein Intervall ist.
Eine Teilmenge von R ist genau dann zusammenhängend, wenn sie
Beweis. ⇐=“: Es sei X = I ein Intervall in R. Wir nehmen an, es gäbe eine Zerlegung
”
I = A ∪ B von I in zwei disjunkte, nicht-leere Mengen A und B, die beide in I offen sind.
Wir finden dann Punkte a ∈ A und b ∈ B, wobei wir o.E. a < b annehmen dürfen. Da
I ein Intervall ist, ist auch [a, b] ⊆ I. Wegen a ∈ [a, b] ∩ A 6= ∅ und der Vollständigkeit
von R existiert das Supremum s := sup([a, b] ∩ A). Offensichtlich ist s ≤ b. Da A = I \ B
abgeschlossen in I ist, liegt s in A, es ist also s < b. Nach Definition von s folgt ]s, b] ⊆
I \ A = B. Andererseits gehört ein gewisses Intervall [s, s + ε[ mit ε > 0 zu A, da A offen in
I ist. Wir erhalten also einen Widerspruch zu A ∩ B = ∅.
=⇒“: Nun sei X ⊆ R kein Intervall. Dann gibt es Punkte a, b ∈ X mit o.E. a < b und
”
dazwischen einen Punkt s 6∈ X. Die Mengen
A := {x ∈ X | x < s}
und
B := {x ∈ X | x > s}
sind dann disjunkt, offen in X, und wegen s 6∈ X ist A ∪ B = X. Somit ist X nicht
zusammenhängend.
Angesichts von Proposition 1.17 kann man den Zwischenwertsatz auch so formulieren, dass
der Zusammenhang unter stetigen Funktionen f : R −→ R erhalten bleibt. Der folgende
Satz verallgemeinert dies auf beliebige metrische Räume.
Satz 1.18 Es seien X und Y metrische Räume. Falls X zusammenhängend und f : X −→
Y stetig ist, dann ist auch f (X) (als metrischer Teilraum von Y ) zusammenhängend. Gleiches
gilt, wenn man zusammenhängend“ durch wegzusammenhängend“ ersetzt.
”
”
Beweis.
(a) Es sei X zusammenhängend. Wir nehmen an, dass f (X) nicht zusammenhängend
ist. Dann existieren nichtleere disjunkte, in f (X) offene Mengen A, B ⊆ f (X) mit
f (X) = A ∪ B. Da f stetig ist, sind die Urbilder U := f −1 (A) und V := f −1 (B) offen
in X (Satz A.10.4). Somit ist
X = f −1 (f (X)) = f −1 (A ∪ B) = f −1 (A) ∪ f −1 (B) = U ∪ V
15
die Vereinigung zweier nichtleerer, in X offener Mengen, und wegen
U ∩ V = f −1 (A) ∩ f −1 (B) = f −1 (A ∩ B) = f −1 (∅) = ∅
ist diese Vereinigung disjunkt3 . Dies ist ein Widerspruch zur Voraussetzung, dass X
zusammenhängend ist.
Damit ist gezeigt, dass f (X) zusammenhängend ist.
(b) Übungen, Aufgabe 2.?
Satz 1.19
(a) Jede wegzusammenhängende Teilmenge von C ist zusammenhängend.
(b) Eine offene Teilmenge von C ist genau dann zusammenhängend, wenn sie wegzusammenhängend ist.
Beweis.
(a) Es sei X ⊆ C wegzusammenhängend. Wir nehmen an, es gäbe eine Zerlegung
X = A ∪ B in disjunkte, nicht-leere und (bezüglich der Relativtopologie von X) offene
Teilmengen A und B. Wegen A, B 6= ∅ gibt es Punkte a ∈ A und b ∈ B. Da X wegzusammenhängend ist, lassen sich a und b mit einem Weg γ : [0, 1] −→ X verbinden. Es
ist dann
[0, 1] = γ −1 (X) = γ −1 (A) ∪ γ −1 (B)
eine Zerlegung des Intervalls [0, 1] in die beiden Mengen γ −1 (A) und γ −1 (B). Wegen
0 ∈ γ −1 (A), 1 ∈ γ −1 (B) sind diese beide nicht-leer, und wegen der Stetigkeit von γ
sind sie offen in [0, 1] (Satz A.10.4). Wegen
γ −1 (A) ∩ γ −1 (B) = γ −1 (A ∩ B) = γ −1 (∅) = ∅
ist die Zerlegung außerdem disjunkt. Dies ist aber ein Widerspruch dazu, dass [0, 1]
gemäß Proposition 1.17 zusammenhängend ist. Damit ist gezeigt, dass X zusammenhängend ist.
(b) Es sei X ⊆ C offen. Wenn X wegzusammenhängend ist, so ist X nach (a) auch zusammenhängend.
Nun sei X zusammenhängend. Falls X = ∅ ist, ist X trivialerweise wegzusammenhängend. Es sei also X 6= ∅. Dann können wir ein a ∈ X wählen und die Menge
A := {z ∈ X | Es existiert ein Weg in X von a nach z}
betrachten. Wir zeigen, dass A und B := X \ A offen in X sind:
(i) A ist offen: Zum Beweis sei ein z ∈ A gegeben. Da X offen ist, gibt es eine Kugel
Uε (z) ⊆ X. Es sei ein y ∈ Uε (z) gegeben. Wegen z ∈ A lässt sich z durch einen
in X verlaufenden Weg mit a verbinden. Setzt man diesen mit der (in Uε (z) ⊆ X
verlaufenden) Strecke von z nach y zusammen, so erhält man einen Weg in X,
der a mit y verbindet. Also ist y ∈ A. Damit ist Uε (z) ⊆ A gezeigt. Hieraus folgt
die Offenheit von A.
3
Hier haben wir die aus Abschnitt A.13.1 bekannten Regeln über den Urbildoperator benutzt.
16
(ii) X \ A ist offen: Hierzu sei ein w ∈ X \ A gegeben. Da X offen ist, gibt es
eine Kugel Uε (w) ⊆ X. Gäbe es ein y ∈ Uε (w) ∩ A, so wären a und y durch
einen in X verlaufenden Weg verbindbar. Da aber auch y und w durch einen
Weg in X verbunden werden können, würde dies dann auch für a und w gelten.
Definitionsgemäß wäre dann aber w ∈ A, ein Widerspruch. Also ist Uε (w) ⊆ X \A.
Damit ist auch die Offenheit von X \ A gezeigt.
Da X = A ∪ (X \ A) eine disjunkte Zerlegung von X in zwei, wie wir soeben nachgewiesen haben, offene Mengen ist und X zusammenhängend ist, muss A = ∅ oder
X \ A = ∅ gelten. Wegen a ∈ A liegt der letztere Fall vor. Dies bedeutet aber A = X,
d.h. jeder Punkt in X lässt sich durch einen Weg in X mit a verbinden. Damit lassen sich auch zwei beliebige Punkte x1 , x2 ∈ X durch einen in X verlaufenden Weg
verbinden, nämlich durch einen, der von x1 über a nach x2 führt. Dies zeigt, dass X
wegzusammenhängend ist.
Beispiel 1.20
Auf die Offenheitsvoraussetzung in (b) kann nicht verzichtet werden: Für
beliebige Teilmengen von C ist der Begriff des Wegzusammenhangs enger als der des Zusammenhangs. Beispielsweise kann man zeigen, dass die in Abbildung 7 skizzierte Menge
1
t + i sin : 0 < t ≤ 1 ∪ {0}
t
zusammenhängend, aber nicht wegzusammenhängend ist. Für Details verweisen wir auf
[Königsberger 2, S. 40].
1.0
0.5
•
0.02
0.04
0.06
0.08
0.10
-0.5
-1.0
Abbildung 7: Eine zusammenhängende, aber nicht wegzusammenhängende Menge
Die Definitionsbereiche komplex differenzierbarer Funktionen sind typischerweise offene zusammenhängende Teilmengen von C. Für solche Mengen führen wir einen eigenen Begriff
ein:
Definition 1.21 Unter einem Gebiet in C verstehen wir eine nichtleere, offene, zusammenhängende Teilmenge von C.
Gemäß Satz 1.19 können wir für Gebiete die Begriffe Zusammenhang und Wegzusammenhang synonym verwenden. M.a.W. ist eine offene nichtleere Teilmenge von C genau dann ein
Gebiet, wenn sie wegzusammenhängend ist.
17
Definition 1.22 Es sei U ⊆ C eine nichtleere offene Menge. Zwei Punkte p, q ∈ U nennen
wir äquivalent, wenn es einen Weg in U von p nach q gibt. Hierdurch ist offensichtlich eine
Äquivalenzrelation auf U definiert. Die zugehörigen Äquivalenzklassen heißen die Zusammenhangskomponenten von U.
Proposition 1.23 Es sei U ⊆ C eine nichtleere offene Menge. Jede Zusammenhangskomponente von U ist ein Gebiet. U besitzt nur abzählbar viele Zusammenhangskomponenten
Beweis. Es sei G eine Zusammenhangskomponente von U.
Es seien zwei Punkte p, q ∈ G gegeben. Nach Definition von G lassen sich dann p und q durch
einen Weg γ in U verbinden. Alle Punkte auf Spur (γ) lassen sich offensichtlich auch mit p
verbinden (durch einen Teilweg“ von γ), liegen also in derselben Zusammenhangskompo”
nente von U wie p, d.h. in G. Daher ist γ sogar ein Weg in G. Also ist G zusammenhängend.
Es sei ein p ∈ G gegeben. Wegen der Offenheit von U gibt es ein δ > 0 mit Uδ (p) ⊆
U. Offensichtlich lassen sich alle Punkte in Uδ (p) durch einen in Uδ (p) (und damit in U)
verlaufenden Weg mit p verbinden, liegen also in derselben Zusammenhangskomponente von
U wie p. Dies zeigt Uδ (p) ⊆ G. Damit ist die Offenheit von G nachgewiesen. Insgesamt ist
G also ein Gebiet.
Da die einzelnen Zusammenhangskomponenten von U paarweise disjunkt sind (wie Äquivalenzklassen generell) und in jeder von ihnen eine komplexe Zahl mit rationalen kartesischen Koordinaten liegt, lassen sich die Zusammenhangskomponenten von U ebenso wie Q2
abzählen.
B
A
Spur (γ)
Abbildung 8: Der Jordan’sche Kurvensatz
Gelegentlich benötigen wir im Folgenden den Jordan’schen Kurvensatz:
Satz 1.24 (Jordan’scher Kurvensatz) Jeder Jordan-Weg γ in C zerlegt die Ebene
C in zwei disjunkte Zusammenhangskomponenten, das Innere A und das Äußere B dieses
Weges, so dass
C = Spur (γ) ∪ A ∪ B
und
gilt.
18
∂A = ∂B = Spur (γ)
Dieser Sachverhalt erscheint unmittelbar einleuchtend und beinahe selbstverständlich (vgl.
Abbildung 8). Der Beweis ist jedoch überraschend schwierig und aufwändig; wir müssen für
ihn auf Lehrbücher der Topologie verweisen.
Nach diesen Vorbereitungen können wir uns nun dem eigentlichen Gegenstand der Funktionentheorie zuwenden: den holomorphen, d.h. auf offenen Mengen komplex differenzierbaren Funktionen.
19
2
Holomorphe Funktionen
Die Funktionentheorie beschäftigt sich mit differenzierbaren komplexwertigen Funktionen
von einer komplexen Variablen. Hierbei wird Differenzierbarkeit im Komplexen auf den ersten
Blick völlig analog zur (eindimensionalen) reellen Differenzierbarkeit definiert, nämlich über
die Existenz des Grenzwerts des Differenzenquotienten. Insofern mag es überraschen, dass im
Vergleich zur Theorie reell differenzierbarer Funktionen ganz neuartige Aspekte auftreten.
Insbesondere erweist sich die komplexe Differenzierbarkeit als wesentlich stärker als die reelle
Differenzierbarkeit: Während im Reellen die Ableitung einer Funktion nicht einmal stetig sein
muss, gilt im Komplexen, dass eine Funktion, die einmal differenzierbar ist, bereits unendlich
oft differenzierbar ist, ja sogar (was noch wesentlich stärker ist!) analytisch, d.h. lokal in eine
Potenzreihe entwickelbar ist.
2.1
Komplexe Differenzierbarkeit
Definition 2.1 Es sei U eine offene Menge in C. Eine Funktion f : U −→ C heißt in
einem Punkt z0 ∈ U komplex differenzierbar, falls der Grenzwert
f (z) − f (z0 )
=: f ′ (z0 )
z→z0
z − z0
lim
existiert. In diesem Fall heißt f ′ (z0 ) die Ableitung von f in z0 .
Falls f in jedem Punkt von U komplex differenzierbar ist, so nennt man f holomorph in U.
Ferner heißt f holomorph im Punkt z0 ∈ U, falls es eine Umgebung U0 ⊆ U von z0 gibt,
so dass die Restriktion f |U0 holomorph ist4 , so dass f also in jedem Punkt von U0 komplex
differenzierbar ist.
Bemerkung 2.2
(1) Wie in der reellen Analysis auch kann diese Definition wie folgt äquivalent umgeschrieben werden:
Eine Funktion f : U −→ C auf einer offenen Menge U ⊆ C ist genau dann komplex
differenzierbar in z0 ∈ U mit Ableitung f ′ (z0 ), wenn es eine in einer Umgebung U0 von
0 definierte Funktion r : U0 −→ C gibt, so dass
f (z0 + Z) = f (z0 ) + f ′ (z0 ) · Z + r(Z)
für alle Z ∈ U0
und
r(Z)
= 0,
Z→0 Z
lim
d.h. wenn f lokal um z0 linear approximierbar ist.
(2) Für die Definition komplexer Differenzierbarkeit ist die Körperstruktur von C entscheidend: Sie erlaubt es, überhaupt Differenzenquotienten zu bilden; im Vektorraum R2
(ohne die multiplikative Struktur von C) beispielsweise wäre dies nicht möglich.
4
Etwas weniger präzise sagt man in diesem Fall für gewöhnlich, dass f in U0 holomorph ist.
20
(3) Die obige Definition einer holomorphen Funktion geht auf Riemann zurück. Bei ihm
steht die geometrische Interpretation holomorpher Funktionen als Abbildungen zwischen Bereichen in der Zahlenebene C, die in ihren entsprechenden kleinsten Thei”
len ähnlich sind“ im Vordergrund (vgl. hierzu den Abschnitt 2.3 über lokal konforme
Abbildungen). Von Weierstraß stammt ein anderer Zugang. Er definiert holomorphe
Funktionen als Funktionen, die lokal in konvergente Potenzreihen entwickelbar sind.
Die Äquivalenz beider Definitionen wird in Satz 3.11 und Korollar 3.31 gezeigt.
(4) Die Existenz des komplexen Grenzwerts limz→z0 ist eine viel restriktivere Forderung
als im Reellen: Anders als in R gibt es nicht nur zwei Richtungen, aus denen man
sich z0 annähern kann (nämlich von links und von rechts), sondern unendlich viele,
und man kann sich nicht nur auf Halbgeraden annähern, sondern auf allen möglichen
anderen Wegen (z.B. spiralförmigen, oszillierenden,. . . ). Dies mag eine erste Plausibilisierung dafür sein, dass der komplexe Differenzierbarkeitsbegriff ungleich stärker ist als
der reelle. Den Unterschied illustriert das folgende, für die gesamte Funktionentheorie
fundamentale Beispiel:
Beispiel 2.3 Die durch f (z) := z für alle z ∈ C definierte Funktion f : C −→ C (Konjugation) ist stetig in C, aber in keinem z0 ∈ C komplex differerenzierbar, denn der Differenzenquotient
z0 + h − z0
h
f (z0 + h) − f (z0 )
=
=
h
h
h
besitzt für h → 0 keinen Grenzwert: Z.B. ist
h
=1
h
für h ∈ R,
aber
h
= −1
h
für h ∈ i · R.
Dieses einfache Beispiel ist insofern überraschend, als in der rellen Analysis stetige, nirgends
differenzierbare Funktionen eher pathologisch“ sind. Das erste solche Beispiel, nämlich
”
∞
X cos(an πx)
a
3π
f (x) :=
mit
b
>
1
und
>
1
+
bn
b
2
n=0
hat Weierstraß 1861 bekannt gemacht. Ein weiteres Beispiel findet man in [Königsberger 1,
S. 153].
Ungeachtet des letzten Beispiels übertragen sich viele der aus dem Reellen bekannten Resultate über differenzierbare Funktionen ins Komplexe und können wörtlich wie in der Analysis
einer reellen Variablen bewiesen werden. Sie sind in den folgenden beiden Sätzen zusammengefasst.
Satz 2.4 (Rechenregeln für Ableitungen)
Es sei U ⊆ C eine offene Menge und
z0 ∈ U. Die Funktionen f, g : U −→ R seien in z0 komplex differenzierbar. Dann gilt:
(1) Die Funktion f ist stetig in z0 .
(2) Für alle a, b ∈ C ist die Linearkombination a · f + b · g im Punkt z0 komplex differenzierbar mit der Ableitung
(af + bg)′ (z0 ) = a · f ′ (z0 ) + b · g ′ (z0 ).
21
(3) (Produktregel) Das Produkt f · g ist in z0 komplex differenzierbar mit der Ableitung
(f · g)′(z0 ) = f ′ (z0 ) · g(z0 ) + f (z0 ) · g ′(z0 ).
(4) (Quotientenregel) Wenn g(z0 ) 6= 0 ist, dann ist die Funktion
bar in z0 mit der Ableitung
f
g
komplex differenzier-
′
f
f ′ · g − f · g′
(z0 ) .
(z0 ) =
g
g2
Beweis. Analog zum Beweis von Satz A.14.11.
Aus Satz 2.4 folgt insbesondere, dass alle Polynomfunktionen holomorph in C sind. Ob auch
Potenzreihen in ihrem Konvergenzkreis holomorphe Funktionen darstellen, lässt sich mit
diesem Satz allerdings noch nicht entscheiden.
Satz 2.5 (Kettenregel)
Es seien U und V offene Mengen in C. Die Funktion f : U −→
V sei im Punkt z0 ∈ U komplex differenzierbar, und die Funktion g : V −→ C sei im Punkt
w0 := f (z0 ) ∈ V komplex differenzierbar. Dann ist die Funktion g ◦ f : U −→ C im Punkt
z0 komplex differenzierbar mit der Ableitung
(g ◦ f )′ (z0 ) = g ′ (w0 ) · f ′ (z0 ).
Falls f auf U und g auf V holomorph ist, dann ist g ◦ f auf U holomorph mit
(g ◦ f )′ = (g ′ ◦ f ) · f ′ .
Beweis. Analog zum Beweis von Satz A.14.12.
Diese Rechenregeln bleiben deshalb im Komplexen gültig, weil ihr Beweis lediglich die Definition von Differenzierbarkeit benutzt, die im Reellen und Komplexen formal gleich ist. Die
Entsprechungen zwischen reeller und komplexer Differentialrechnung enden jedoch bereits
beim Mittelwertsatz, für den es kein komplexes“ Analogon gibt:
”
Beispiel 2.6
Die Funktion f := exp ist holomorph in C mit f (0) = 1 = f (2πi). Wäre
der Mittelwertsatz (und damit der Satz von Rolle) im Komplexen gültig, so müsste es ein
ξ zwischen“ 0 und 2πi geben mit f ′ (ξ) = 0. Jedoch nimmt f ′ = exp weder auf der Strecke
”
[0, 2πi] noch sonstwo in C den Wert Null an. (Dass auch in der komplexen Analysis exp′ = exp
gilt, wird in Korollar 3.13 bewiesen.)
Der Mittelwertsatz ist für holomorphe Funktionen also nicht gültig.
Bekanntlich beruhen viele wichtige Sätze der eindimensionalen reellen Differentialrechnung
auf dem Mittelwertsatz. Damit ist zumindest fraglich, inwieweit diese für holomorphe Funktionen gültig bleiben. Vor der unkritischen Übertragung von Resultaten aus der reellen in
die komplexe Analysis sollte man sich daher sehr hüten.
22
Beispiel 2.7 (Veranschaulichung holomorpher Funktionen)
Mitunter wird die
Funktionentheorie auch deshalb als unanschaulich empfunden, weil es nicht möglich ist, den
Graphen einer holomorphen Funktion vernünftig zu zeichnen – dieser ist ja eine Teilmenge
von C2 ∼
= R4 . Man kann das Abbildungsverhalten holomorpher Funktionen aber auch gut
veranschaulichen, ohne den Graphen zu verwenden, nämlich auf exakt die gleiche Weise, wie
man das Abbildungsverhalten von Ähnlichkeitstransformationen (Drehstreckungen, Translationen und Spiegelungen) des R2 in der Schulgeometrie veranschaulicht, indem man nämlich
gewisse Figuren und deren Bilder unter der Abbildung zeichnet. Die genaue Information über
die punktweise Zuordnung, die der Graph zur Verfügung stellt, wird dabei aufgegeben, was
aber eher einen Gewinn an Übersichtlichkeit darstellt. Stattdessen ist es hilfreich, die abzubildenden Mengen (typischerweise oft Kreise oder Rechtecke) mit einem Koordinatengitter
(entweder in kartesischen oder Polarkoordinaten) zu versehen und dieses mitabzubilden. Wir
betrachten einige typische Beispiele:
(1) Es seien a, b ∈ C, a 6= 0. Dann ist a = reiϕ mit gewissen r > 0, ϕ ∈ [0, 2π[. Durch
f (z) := az + b
wird eine holomorphe Funktion f : C −→ C definiert. Sie stellt die Verkettung einer
Drehstreckung (mit dem Streckungsfaktor r und dem Drehwinkel ϕ) mit einer Translation um den Vektor“ b dar. Abbildung 9 illustriert, wie Quadrate und Kreise um 0
”
durch f abgebildet werden. Offensichtlich ist f winkel- und orientierungserhaltend.
4
4
3
3
2
2
f
1
-
1
0
0
-1
-1
-2
-2
0
2
4
-2
-2
6
4
4
3
3
2
2
4
6
0
2
4
6
2
f
1
-
1
0
0
-1
-1
-2
-2
0
0
2
4
-2
-2
6
Abbildung 9: Die Abbildung f (z) := az + b mit a = 1.5 · eπi/4 , b = 3 + i
(2) Es sei n ≥ 2 eine natürliche Zahl. Das Abbildungsverhalten der Potenzfunktion
g(z) := z n
wird am einfachsten in Polarkoordinaten einsichtig: Für alle r > 0, ϕ ∈ R ist
g(reiϕ ) = r n einϕ .
23
Durch g werden Winkel mit 0 als Scheitelpunkt also um den Faktor n vergrößert
(während Winkel mit anderem Scheitelpunkt invariant bleiben). Zudem werden Punkte
nahe“ bei 0 (mit |z| < 1) zur 0 hingezogen“, während Punkte mit |z| > 1 von der
”
”
Null abgestoßen“ werden. Kleine“ Kreise mit Radius < 1 werden also noch weiter
”
”
verkleinert, große“ Kreise mit Radius > 1 hingegen vergrößert. Abbildung 10 zeigt
”
die Abbildung eines Sektors des Einheitskreises durch g im Fall n = 4.
1.0
1.0
0.5
0.5
4
z 7→ z0.0
0.0
-0.5
-0.5
-1.0
-1.0
-1.0
-0.5
0.0
0.5
1.0
-1.0
-0.5
0.0
0.5
1.0
Abbildung 10: Die Abbildung eines Kreissektors mit Öffnungswinkel 2π/5 durch g(z) := z 4
(3) Abbildung 11 zeigt, wie der Einheitskreis D (und die Kreise Ur (0) mit r = 0.1, r =
0.2, . . . , r = 0.9) durch die holomorphe Funktion
abgebildet werden.
h(z) := 5z + z 2 + iz 3 − 2z 4
Man kann gut erkennen, wie kleine Kreise um 0 fast exakt auf (um den Faktor 5
gestreckte) Kreise um Null abgebildet werden, wie aber bei wachsendem Kreisradius
zunehmend Verzerrungseffekte ins Spiel kommen. Sie rühren daher, dass mit wachsendem |z| die nichtlinearen Anteile z 2 , iz 3 und −2z 4 gegenüber dem linearen Anteil 5z
(der für kleine“ z der dominante Anteil ist) zunehmend ins Gewicht fallen.
”
(4) Es sei a = b + ic mit b, c ∈ R und 0 < ε < π. Das offene Quadrat
Qε (a) = {x + iy : x, y ∈ R, |x − b| < ε, |y − c| < ε}
wird durch die Exponentialfunktion auf das Gebiet
Bε (a) = ex · eiy : x, y ∈ R, |x − b| < ε, |y − c| < ε
= reit : eb−ε < r < eb+ε , |t − c| < ε ,
also einen offenen Kreisringsektor mit Öffnungswinkel 2ε abgebildet. (Die Voraussetzung ε < π stellt dabei sicher, dass sich das obere“ und das untere“ Endstück des
”
”
Kreisringsektors nicht überlappen.) In diesem Beispiel sieht man schön, wie die Form
des Quadrats Qε (a) unter der Abbildung durch exp ungefähr erhalten bleibt, wie aber
wiederum Verzerrungseffekte auftreten (Abbildung 12). Diese sind um so ausgeprägter,
je größer die Ausdehnung des Quadrats, d.h. je größer ε ist.
24
6
4
2
0
-2
-4
-6
-8
-6
-4
-2
0
2
4
6
Abbildung 11: Die Abbildung von D durch h(z) := 5z + z 2 + iz 3 − 2z 4
3
2.5
2
1.5
1
0.5
1
2
3
4
Abbildung 12: Die Abbildung von Qε (a) durch die Exponentialfunktion im Fall a = 1 + 0.5i,
ε = 0.4
25
2.2
Der Zusammenhang von komplexer Differenzierbarkeit mit
Differenzierbarkeit im R2
Da es sich bei C lediglich“ um den mit einer zusätzlichen (multiplikativen) Struktur versehe”
nen Vektorraum R2 handelt, lassen sich Funktionen f : U −→ C auf einer offenen Teilmenge
U von C auch auf totale Differenzierbarkeit im Sinne der mehrdimensionalen reellen Analysis
untersuchen. Wir erinnern zunächst an die Definition der totalen Differenzierbarkeit (Definition A.24.6), die wir in unserem Kontext als reelle totale Differenzierbarkeit bezeichnen,
um sie von der komplexen Differenzierbarkeit abzugrenzen.
Definition 2.8 (Reelle totale Differenzierbarkeit) Es sei U eine offene Teilmenge
von C, z0 ∈ U und x0 := Re z0 , y0 := Im z0 . Eine Funktion f : U −→ C heißt reell (total)
differenzierbar in z0 , falls es eine R-lineare Abbildung
L : R2 −→ R2
und eine in einer Umgebung U0 von 0 definierte Funktion r : U0 −→ C gibt, so dass
f (x0 + X, y0 + Y ) = f (x0 , y0) + L(X, Y ) + r(X, Y )
und
lim
(X,Y )→(0,0)
für alle (X, Y ) ∈ U0
r(X, Y )
=0
||(X, Y )||
gilt. In diesem Fall heißt L die Ableitung oder das (totale) Differential von f im Punkt
z0 und wird mit Df (z0 ) bezeichnet. Die Funktion f heißt reell (total) differenzierbar,
falls sie in jedem Punkt z0 ∈ U reell total differenzierbar ist.
Die Schreibweisen (X, Y ) und f (x0 +X, y0 +Y ) anstelle von X +iY und f (x0 +X +i(y0 +Y ))
mögen zunächst überraschen. Gemäß unserer Definition von C ist aber x + iy (mit x, y ∈ R)
nur eine andere Notation für (x, y).
Gemäß Satz A.24.9 folgt aus der reellen totalen Differenzierbarkeit von f die Existenz der
partiellen Ableitungen von u := Re f und v := Im f ; die Darstellungsmatrix der Ableitung
Df (z0 ) bezüglich der Standardbasis des R2 hat dann die Form
ux uy
(z0 )
Jf (z0 ) =
vx vy
und heißt die Jacobi-Matrix von f im Punkt z0 . (Hierbei ist ux :=
∂u
∂x
usw.)
Vergleicht man die Definitionen von komplexer und reeller Differenzierbarkeit einer Funktion
f : U −→ C im Punkt z0 ∈ U, so zeigt sich eine weitreichende Übereinstimmung: Beide
Definitionen bedeuten lokale lineare Approximierbarkeit; genauer wird in beiden Fällen die
Existenz einer in einer Umgebung U0 von z0 definierten Funktion r : U0 −→ C verlangt,
welche
r(Z)
r(X, Y )
lim
=0
bzw.
lim
=0
Z→0 Z
(X,Y )→(0,0) ||(X, Y )||
erfüllt, so dass
f (z0 + Z) = f (z0 ) + f ′ (z0 ) · Z + r(Z)
26
für alle Z ∈ U0
(K)
bzw.
f (z0 + Z) = f (z0 ) + Jf (z0 ) · (X, Y )T + r(Z)
für alle Z = (X, Y ) ∈ U0
(R)
gilt5 . Die beiden Grenzwertbedingungen an r sind offensichtlich äquivalent; allerdings tritt
im Fall (K) der komplexen Differenzierbarkeit die C-lineare Abbildung Z 7→ f ′ (z0 ) · Z (von
C in sich) auf, im Fall (R) der reellen Differenzierbarkeit hingegen die R-lineare Abbildung
Df (z0 ) : R2 −→ R2 , (X, Y ) 7→ Jf (z0 ) · (X, Y )T . Wie die Definition des Produkts in C zeigt,
ist die Multiplikation mit f ′ (z0 ) - als lineare Abbildung des R2 in sich aufgefasst - aber nichts
anderes als die Multiplikation mit der Matrix
a −b
,
b a
wobei a := Re f ′ (z0 ), b := Im f ′ (z0 ). Damit ist der im folgenden Satz beschriebene enge
Zusammenhang zwischen den beiden Differenzierbarkeitsbegriffen plausibilisiert (und auch
schon beinahe bewiesen).
Satz 2.9 Es sei U ⊆ C offen. Eine Funktion f : U −→ C ist im Punkt z0 ∈ U genau
dann komplex differenzierbar, wenn sie dort reell total differenzierbar ist und für u := Re f ,
v := Im f die Cauchy-Riemannschen Differentialgleichungen
ux (z0 ) = vy (z0 ),
uy (z0 ) = −vx (z0 )
(CRD)
erfüllt sind. In diesem Fall gilt f ′ (z0 ) = (ux + ivx )(z0 ).
Beweis. =⇒“: Es sei f in z0 komplex differenzierbar. Dann gilt die Darstellung (K). Wie
”
oben setzen wir a := Re f ′ (z0 ), b := Im f ′ (z0 ). Da die C-lineare Abbildung Z 7→ f ′ (z0 ) · Z
auch R-linear ist und die Darstellungsmatrix
a −b
b a
hat, genügt f der Darstellung (R), ist also reell total differenzierbar in z0 , und es gilt
a −b
ux uy
= Jf (z0 ) =
(z0 ).
b a
vx vy
Insbesondere gilt ux (z0 ) = a = vy (z0 ) und vx (z0 ) = b = −uy (z0 ), d.h. die CauchyRiemannschen Differentialgleichungen sind in z0 erfüllt.
Ferner ist damit auch
f ′ (z0 ) = a + ib = (ux + ivx )(z0 )
gezeigt.
⇐=“: Nun sei f in z0 reell total differenzierbar und erfülle dort die Cauchy-Riemannschen
”
Differentialgleichungen. Der lineare Anteil in (R) ist dann
ux −vx
X
T
Jf (z0 ) · (X, Y ) =
(z0 ) ·
= (ux + ivx )(z0 ) · (X + iY ).
vx ux
Y
Also ist f in z0 komplex differenzierbar mit der Ableitung f ′ (z0 ) = (ux + ivx )(z0 ).
5
Hierbei haben wir die Notationen gegenüber den in obigen Definitionen verwendeten bereits so angepasst,
dass die Analogie möglichst augenfällig wird.
27
Beispiel 2.10 Die Gültigkeit der Cauchy-Riemannschen Differentialgleichungen alleine
(ohne die reelle totale Differenzierbarkeit) stellt noch keine komplexe Differenzierbarkeit
sicher. Beispielsweise kann man zeigen, dass die durch
(
exp −1
für alle z ∈ C \ {0}
z4
f (z) :=
0
für z = 0
definierte Funktion f : C −→ C in ganz C stetig partiell differenzierbar ist und dort (insbesondere auch in z = 0) die Cauchy-Riemannschen Differentialgleichungen erfüllt (siehe
Aufgabe 3.2). Jedoch ist f nicht einmal stetig in z = 0. Es gilt nämlich
+1
iπ/4
lim f e t = lim exp
= ∞.
t→0
t→0
t4
Mithilfe des sog. Wirtinger-Kalküls lassen sich die beiden Cauchy-Riemannschen Differentialgleichungen zu einer zusammenfassen.
Definition 2.11
Es sei U ⊆ C offen, f : U −→ C eine Funktion und u := Re f ,
v := Im f . Es seien u und v partiell differenzierbar. Dann setzt man
fx =
∂f
:= ux + ivx ,
∂x
fy =
∂f
:= uy + ivy
∂y
und nennt fx , fy die partiellen Ableitungen von f nach x bzw. y. Weiter erklärt man die
Wirtinger-Ableitungen von f durch
fz :=
Satz 2.12
v := Im f .
1
(fx − ify ) ,
2
fz :=
1
(fx + ify ) .
2
Es sei U ⊆ C offen, z0 ∈ U und f : U −→ C eine Funktion mit u := Re f ,
(a) Genau dann ist f in z0 komplex differenzierbar, wenn f in z0 reell total differenzierbar
ist mit fz (z0 ) = 0.
(b) Falls f in z0 komplex differenzierbar ist, gilt
f ′ (z0 ) = fz (z0 ) = fx (z0 ) = −ify (z0 )
und
|f ′ (z0 )|2 = (u2x + vx2 )(z0 ) = det Jf (z0 ).
Beweis.
(a) Nach den Definitionen ist
fz =
1
1
1
(fx + ify ) = (ux + ivx + i(uy + ivy )) = (ux − vy + i(uy + vx )) .
2
2
2
Daher ist die Bedingung fz (z0 ) = 0 äquivalent zur Gültigkeit der Cauchy-Riemannschen Differentialgleichungen (CRD) im Punkt z0 . Hieraus und aus Satz 2.9 folgt die
Behauptung in (a).
28
(b) Es sei f in z0 komplex differenzierbar. Dann ist gemäß (a) fz (z0 ) = 0. Hieraus und aus
den Definitionen der Wirtinger-Ableitungen folgt
1
fx (z0 ) = −ify (z0 )
und somit
fz (z0 ) = (fx − ify ) (z0 ) = fx (z0 ).
2
Nach Satz 2.9 gilt außerdem
f ′ (z0 ) = (ux + ivx )(z0 ) = fx (z0 ).
Damit folgt nunmehr auch
|f ′(z0 )|2 = |(ux + ivx )(z0 )|2 = (u2x + vx2 )(z0 ) = det Jf (z0 ).
Damit sind alle Behauptungen gezeigt.
Variante: Die Identität f ′ (z0 ) = fx (z0 ) erhält man alternativ auch, wenn man in der
Definition von f ′ (z0 ) als Grenzwert des Differenzenquotienten den Grenzübergang auf
Variationen des Arguments in Richtung der reellen Achse einschränkt: Es gilt
f (z0 + h) − f (z0 )
f (z0 + x) − f (z0 )
= lim
x→0,x∈R
h→0,h∈C
h
x
v(z0 + x) − v(z0 )
u(z0 + x) − u(z0 )
+ i · lim
=
lim
x→0,x∈R
x→0,x∈R
x
x
= ux (z0 ) + ivx (z0 ) = fx (z0 ).
f ′ (z0 ) =
lim
Beispiel 2.13
Es sei f (z) := |z|2 = zz bzw. in reeller Schreibweise f (x, y) := x2 + y 2 .
Für u := Re f , v := Im f gilt u(x, y) = x2 + y 2 und v ≡ 0, also
ux (x, y) = 2x,
uy (x, y) = 2y,
vx (x, y) = vy (x, y) = 0
und folglich (mit z = (x, y))
1
1
fz (z) = (fx − ify ) (z) = (ux − iuy ) (x, y) = x − iy = z,
2
2
1
fz (z) = (fx + ify ) (z) = x + iy = z.
2
Dasselbe Ergebnis für fz (bzw. fz ) erhält man wesentlich schneller, wenn man f (z) = zz
formal nach z differenziert und dabei z festhält (bzw. umgekehrt).
Die Cauchy-Riemannschen Differentialgleichungen sind für f nur im Nullpunkt erfüllt. Daher
ist f zwar in ganz C reell total differenzierbar, aber nur in z = 0 komplex differenzierbar.
Damit ist f in keinem z0 ∈ C holomorph - auch nicht in 0.
Es sei an dieser Stelle betont, dass für die gesamte Funktionentheorie nicht das Konzept der komplexen Differenzierbarkeit (in evtl. wenigen“ Punkten), sondern das der Ho”
lomorphie das relevante ist. Den Grund dafür erkennt man anhand der Charakterisierung komplex-differenzierbarer Funktionen mittels der Cauchy-Riemannschen Differentialgleichungen: Komplexe Differenzierbarkeit in einem Punkt bedeutet, dass diese Differentialgleichungen in diesem einen Punkt erfüllt sind. Es ist aber augenscheinlich wenig ergiebig,
Differentialgleichungen punktweise zu lösen; man interessiert sich immer für Lösungen auf
ganzen Umgebungen eines gegebenen Punktes.
Umgekehrt sind es die Cauchy-Riemannschen Differentialgleichungen, die – falls sie auf einer
offenen Menge erfüllt sind – für die starken inneren Bildungen zwischen den Funktionswerten einer holomorphen Funktion verantwortlich sind, denen wir im Folgenden noch häufig
begegnen werden.
29
Bemerkung 2.14 (Wirtinger-Kalkül) Die Definition der Wirtinger-Ableitungen ist so
eingerichtet, dass sie die folgende einprägsame Merkregel ermöglicht:
Bei der Berechnung von fz bzw. fz darf man so tun, als ob f eine Funktion der
beiden unabhängigen Variablen z und z wäre, und darf formal nach z bzw z
differenzieren.
Dies ergibt sich daraus, dass (wie man leicht nachrechnet)
∂z
= 1,
∂z
∂z
= 1,
∂z
∂z
= 0,
∂z
∂z
=0
∂z
∂
∂
gilt und dass für die Differentialoperatoren ∂z
und ∂z
formal die gleichen Rechenregeln wie
bei der gewöhnlichen partiellen Differentiation, einschließlich der Produkt- und Kettenregel gelten. Letzteres ist allerdings keineswegs selbstverständlich, sondern bedarf einer Begründung. Da der Wirtinger-Kalkül für unsere Zwecke (anders als in der Funktionentheorie
mehrerer Variabler) keine große Rolle spielt, verzichten wir darauf, dies in allen Einzelheiten
auszuführen, und geben in Lemma 2.15 lediglich exemplarisch eine Variante der Kettenregel
an, die wir später mehrfach benötigen.
Zum Verständnis äußerst nützlich ist allerdings die folgende Interpretation der CauchyRiemannschen Differentialgleichung fz = 0:
Holomorphe Funktionen sind unabhängig von z und hängen nur von z ab.
Mit anderen Worten ist eine Funktion, in deren Funktionsvorschrift ein z explizit oder implizit auftaucht, in aller Regel nicht holomorph (sofern sich die z-Anteile nicht zufällig wegheben). Dies gilt auch für Funktionen, die nur indirekt von z abhängen, wie beispielsweise
z 7→ Re (z) =
1
· (z + z) ,
2
z 7→ Im(z) =
1
· (z − z) ,
2i
z 7→ |z| =
√
zz.
alle diese Funktionen sind zwar reell total differenzierbar auf C bzw. (im Fall von z 7→ |z|)
auf C \ {0}, aber nicht holomorph. Dies außer acht zu lassen ist ein häufiger Anfängerfehler.
Lemma 2.15 Es sei U eine offene Teilmenge von C, f : U −→ C eine reell total differenzierbare Funktion, und es sei ϕ : I −→ U eine differenzierbare Funktion auf einem echten
Intervall I ⊆ R. Dann gilt die Kettenregel
d
(f ◦ ϕ)(t) = fz (ϕ(t)) · ϕ′ (t) + fz (ϕ(t)) · ϕ′ (t)
dt
Beweis. Aufgabe 3.1
für alle t ∈ R.
Die Definition der reellen totalen Differenzierbarkeit ist in der Praxis oft nur schwer zu überprüfen. Hier erweist sich ein Kriterium aus der reellen Analysis als äußerst nützlich, wonach
eine stetig partiell differenzierbare Funktion auch reell total differenzierbar ist (Satz A.24.11).
Damit erhalten wir das folgende hinreichende Kriterium für komplexe Differenzierbarkeit.
30
Korollar 2.16
Es sei U ⊆ C offen und z0 ∈ U. Falls für eine Funktion f : U −→ C die
partiellen Ableitungen fx und fy in einer Umgebung U0 ⊆ U von z0 existieren und in z0
stetig sind und falls in z0 die Cauchy-Riemannschen Differentialgleichungen gelten, dann ist
f in z0 komplex differenzierbar.
Ausblick: Will man nicht die komplexe Differenzierbarkeit in einem Punkt, sondern die
Holomorphie in einer offenen Menge nachweisen, so lassen sich die Bedingungen an f noch
abschwächen. Es gilt der folgende Satz von Looman-Menchoff [Narasimhan, S.43-51]: Es sei
U ⊆ C offen und f : U −→ C stetig. Falls die partiellen Ableitungen fx und fy in ganz U
existieren und dort die Cauchy-Riemannschen Differentialgleichungen (d.h. fz = 0) erfüllen,
dann ist f in U holomorph. Auf die Voraussetzung der Stetigkeit kann man hierbei allerdings
nicht verzichten, wie Beispiel 2.10 zeigt.
2.3
Lokal konforme Abbildungen
Die Holomorphie einer Funktion F : G −→ C besitzt eine anschauliche geometrische Interpretation: Sie bedeutet, dass f im Wesentlichen“ winkel- und orientierungstreu abbildet,
”
wobei man allerdings die Ableitungsnullstellen von f ′ ausnehmen muss. Aufgrund des später
zu beweisenden Identitätsprinzips liegen diese freilich isoliert in G, sofern f nicht gerade
konstant ist. Diese geometrische Interpretation der Holomorphie wird ein zentrales Motiv
dieser Vorlesung sein.
Vorüberlegung: Es sei n ∈ N. Eine lineare Abbildung L : Rn −→ Rn heißt eigentlich
orthogonal oder eine Drehung, falls L alle Skalarprodukte invariant lässt und positive
Determinante (und damit Determinante +1) hat. Solche Abbildungen lassen alle Längen
und alle Winkel inklusive ihrer Orientierung invariant. Man nennt L eine Streckung, falls
es eine reelle Zahl c > 0 gibt, so dass L(X) = c · X für alle X ∈ Rn ist. Kompositionen
aus Drehungen und Streckungen heißen Drehstreckungen. Sie lassen alle Winkel inklusive
ihrer Orientierungen unverändert, während alle Längen mit einem festen Faktor multipliziert
werden. Im Falle n = 2 lassen sich alle Drehstreckungen L : R2 −→ R2 in der Form
cos t sin t
X
L(X) := c ·
− sin t cos t
a b
∈ R2×2 beschreibt also genau
mit gewissen c > 0, t ∈ R schreiben. Eine Matrix A =
c d
dann eine Drehstreckung, wenn a = d und b = −c sowie det(A) 6= 0 ist.
Die Eigenschaft der Winkel- und Orientierungstreue bezeichnet man auch als Konformität:
Definition 2.17
Es sei G ein Gebiet in C und f : G −→ C reell total differenzierbar.
Dann heißt f lokal konform in einem Punkt z0 ∈ G, falls die Jacobi-Matrix Jf (z0 ) regulär
ist und falls der Winkel und die Orientierung zwischen je zwei sich in z0 schneidenden glatten
Wegen bei der Abbildung durch f erhalten bleiben.
Falls f injektiv und in jedem z0 ∈ G lokal konform ist, so nennt man f konform in G.
Hierbei verstehen wir unter dem Winkel zwischen zwei glatten Wegen γ1 , γ2 : [−1, 1] −→ C,
die sich in einem Punkt z0 = γ1 (0) = γ2 (0) schneiden, den Winkel zwischen den zugehörigen
Tangentialvektoren γ1′ (0) und γ2′ (0) dieser beiden Wege.
31
Die Regularitätsvoraussetzung an Jf (z0 ) in der Definition hat dabei folgende Bewandtnis:
Ist γ : ] − 1, 1[−→ C ein glatter Weg durch z0 = γ(0) und Jf (z0 ) regulär, so ist nach der
Kettenregel
(f ◦ γ)′ (0) = Jf (γ(0)) · γ ′ (0) = Jf (z0 ) · γ ′ (0) 6= 0,
d.h. der Tangentialvektor (f ◦ γ)′ (0) ist nicht der Nullvektor; dies gewährleistet, dass man
die Winkel zwischen den Bildwegen von Wegen durch z0 sinnvoll (über die Betrachtung von
Tangentialvektoren) messen kann.
f
•
z0
-
•
f (z0 )
Abbildung 13: Lokale Konformität
Satz 2.18 Es sei G ein Gebiet in C, z0 ∈ G und f : G −→ C reell total differenzierbar.
Dann sind die folgenden drei Aussagen äquivalent:
(a) In z0 ist f lokal konform.
(b) Das Differential Df (z0 ) von f in z0 ist eine Drehstreckung.
(c) Die Funktion f ist in z0 komplex differenzierbar mit f ′ (z0 ) 6= 0.
Beweis. (a) ⇐⇒ (b)“: Es sei u := Re f , v := Im f . Nach der Vorüberlegung ist die Jacobi”
Matrix
ux uy
Jf (z0 ) =
(z0 )
vx vy
genau dann die Matrix einer Drehstreckung, wenn ux (z0 ) = vy (z0 ) und uy (z0 ) = −vx (z0 )
sowie det(Jf (z0 )) > 0 ist. Erstere Bedingung bedeutet, dass die Cauchy-Riemannschen Differentialgleichungen erfüllt sind, ist also – da f als reell total differenzierbar vorausgesetzt
war - äquivalent damit, dass f in z0 komplex differenzierbar ist (Satz 2.9). In diesem Fall ist
die zweite Bedingung det(Jf (z0 )) > 0 gemäß Satz 2.12 (b) äquivalent mit f ′ (z0 ) 6= 0. Dies
zeigt die Äquivalenz von (a) und (b).
(c) =⇒ (a)“: Es sei f in z0 ∈ G komplex differenzierbar mit f ′ (z0 ) 6= 0. Es seien γ1 , γ2 :
”
[−1, 1] −→ G zwei glatte Wege in G, die sich in z0 = γ1 (0) = γ2 (0) schneiden, und es seien
Γj := f ◦ γj (j = 1, 2) die zugehörigen Bildwege. Der Tangentialvektor von Γj im Punkt
f (z0 ) ist dann nach Lemma 2.15
Γ′j (0) = (f ◦ γj )′ (0) = fz (γj (0)) · γj′ (0) + fz (γj (0)) · γj′ (0) = f ′ (z0 )) · γj′ (0),
32
denn wegen der komplexen Differenzierbarkeit von f in z0 ist fz (z0 ) = 0 und fz (z0 ) = f ′ (z0 ).
Deshalb und in Anbetracht von f ′ (z0 ) 6= 0 ist
Γ′2 (0)
γ2′ (0)
=
,
Γ′1 (0)
γ1′ (0)
d.h.
arg Γ′2 (0) − arg Γ′1 (0) = arg
Γ′2 (0)
γ2′ (0)
=
arg
= arg γ2′ (0) − arg γ1′ (0).
Γ′1 (0)
γ1′ (0)
Dies bedeutet, dass sich Γ1 und Γ2 in f (z0 ) im gleichen Winkel schneiden wie γ1 und γ2 in
z0 . Somit ist f in z0 ∈ G lokal konform.
(a) =⇒ (c)“: Nun sei f als in z0 ∈ G lokal konform vorausgesetzt.
”
Wir nehmen an, es wäre fz (z0 ) 6= 0, und setzen
q :=
fz (z0 )
.
fz (z0 )
Es sei ein α ∈ [0, 2π] gegeben. Wegen der Offenheit von G gibt es ein ε > 0, so dass durch
γ1 (t) := z0 + eiα t,
γ1 , γ2 : [−ε, ε] −→ G,
γ2 (t) := z0 + t
für − ε < t < ε
zwei glatte Wege in G definiert sind, die sich in z0 = γ1 (0) = γ2 (0) schneiden. Es seien
Γj := f ◦ γj (j = 1, 2) die zugehörigen Bildwege. Wie oben ist dann für j = 1, 2
Γ′j (0) = fz (z0 ) · γj′ (0) + fz (z0 ) · γj′ (0),
also
Γ′1 (0) = fz (z0 ) · eiα + fz (z0 ) · e−iα ,
Γ′2 (0) = fz (z0 ) + fz (z0 ).
Wegen der lokalen Konformität von f ist
arg Γ′2 (0) − arg Γ′1 (0) = arg γ2′ (0) − arg γ1′ (0).
Daher gibt es ein (von α abhängiges) c > 0, so dass
γ2′ (0)
Γ′2 (0)
=
c
·
,
Γ′1 (0)
γ1′ (0)
Mit der Definition von q folgt
Also gilt
also
fz (z0 ) + fz (z0 )
= c · e−iα .
fz (z0 ) · eiα + fz (z0 ) · e−iα
q+1
= c > 0.
q + e−2iα
q+1
>0
q + e−2iα
für alle α ∈ [0, 2π].
Dies ist offensichtlich absurd. Also muss fz (z0 ) = 0 gelten, d.h. f muss in z0 komplex
differenzierbar sein. Da Jf (z0 ) nach Definition der lokalen Konformität regulär ist, folgt mit
Satz 2.12 (b)
|f ′ (z0 )|2 = det Jf (z0 ) 6= 0,
also f ′ (z0 ) 6= 0.
33
Beispiel 2.19
In unserer Definition der lokalen Konformität haben wir den Fall einer
nicht-regulären Jacobi-Matrix von vornherein ausgeklammert. Dies hat die einprägsame Formulierung von Satz 2.18 ermöglicht. Jedoch kann auch eine Abbildung f , deren Jacobi-Matrix
in einem Punkt z0 singulär ist, in diesem Punkt winkel- und orentierungserhaltend sein
(auch wenn diese Eigenschaft dann nicht mehr durch die Betrachtung von Tangentialvektoren erklärt werden kann). Ein Beispiel hierfür ist die Abbildung f (z) := z · |z|2 : Hier ist
fz (0) = fz (0) = 0, also Jf (0) = 0. Jedoch ist f in z0 winkel- und orientierungstreu, wie man
am besten in Polarkoordinaten sieht: Es ist
f (reiα ) = r 3 eiα
für alle r ≥ 0, α ∈ R.
Allerdings ist diese Funktion nicht holomorph. (Sie ist nirgends außer in z0 = 0 komplex differenzierbar.) Für eine in z0 holomorphe Abbildung f mit in z0 singulärer Jacobi-Matrix (d.h.
mit f ′ (z0 ) = 0) kann man hingegen zeigen, dass sie in z0 nicht winkel- und orientierungserhaltend sein kann (vgl. Bemerkung 4.21). Dies liegt daran, dass sich ein (nicht-konstantes)
holomorphes f in einer hinreichend kleinen Umgebung einer Nullstelle z0 von f ′ so ähnlich“
”
verhält wie z 7→ f (z0 ) + a(z − z0 )n mit einem n ≥ 2 und einem a 6= 0. Letztere Abbildung ist
aber offensichtlich nicht winkeltreu. (Lokal um z0 vergrößert sie die Winkel um den Faktor n,
vgl. Beispiel 2.7 (2).) Wir werden dies alles exakt begründen können, sobald wir holomorphe
Funktionen in Potenzreihen werden entwickeln können.
Analog zu Satz 2.18 gilt, dass eine reell total differenzierbare Abbildung f : G −→ C auf
einem Gebiet G ⊆ C winkeltreu und orientierungsumkehrend genau dann ist, wenn fz = 0
und fz 6= 0. Man spricht hier manchmal von antiholomorphen Funktionen. Ein typisches
Beispiel ist die Funktion f (z) = z.
34