2. Fuzzy-Control
Werbung

[1.3]
Fuzzy Control
Unscharfe Regler und dessen Anwendungen
Ein Vortrag im Rahmen des mathematischen Seminars Stochastik
TU-Freiberg SS2002
Ronny Vorpahl
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
1
Gliederung
1. Wiederholung Fuzzy
Scharfe und unscharfe Mengen
Gebräuchliche Fuzzy-Mengen
Operationen auf Fuzzy-Mengen (UND, ODER, NICHT)
Linguistische Variable
2. Fuzzy-Control
Der Fuzzy-Controller
Ein einfaches Beispiel
„FLOP“ (Winfact 6)
Alternative Verarbeitungsmethoden
3. Der Hintergrund
Allgemeines
Anwendungsgebiete
Einsatzziele
4. Ein Beispiel mit JAVA
5. Quellen
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
2
1. Wiederholung als Einstieg
(Wurde alles bereits in vorherigen Vorträgen erzählt)
1.1 Scharfe und unscharfe Mengen
Bsp.:
Der Modellierung der Menge (x sehr viel größer als 1)
x : ( x) {x X | x 1}
Herkömmliche scharfe Menge (nach Boole)
Unscharfe Fuzzy-Menge (nach Zadeh)
Nicht sinnvoll
x=9.9 nicht viel größer als 1 aber
x=10 ist viel größer als 1
Daher sinnvoll
Die unscharfe Menge mit stetig
steigendem Wahrheitsgehalt
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
3
1.2 Gebräuchlichste Fuzzy-Mengen
Wegen der einfacheren Handhabung bei Berechnungen werden praktisch fast nur lineare Mengen genutzt.
Die Arten:
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
4
1.3 Die einfachsten Operationen
Logisches UND , Logisches ODER , Logisches NICHT
(Im Folgenden werden ausschließlich die von Zadeh definierten
Normen verwendet, sind auch die gebräuchlichsten. )
Wahrheitsgrad 2er Aussagen, die durch UND verknüpft sind
(Minimumoperator für den Durchschnitt zweier Fuzzy-Sets)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
5
Wahrheitsgrad 2er Aussagen, die durch ODER verknüpft sind
(Maximumoperator für die Vereinigung zweier Fuzzy-Sets)
Wahrheitsgrad der Negation
(Komplement C eines Fuzzy-Set A)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
6
1.4 Begriff Linguistische Variable
Einer linguistischen Variable hier „Temperatur“ wird ein Satz von linguistischen Termen (sehr_niedrig bis
sehr_hoch) samt Fuzzy-Mengen zugeordnet wird, die den zu betrachtenden Wertebereich abdecken.
Üblich sind je 3,5 oder 7 Fuzzy-Mengen pro linguistische Variable.
(Linguistische Terme sind Adjektive aus der Umgangssprache)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
7
2. Fuzzy-Control
2.1 Der Fuzzy-Controller
Prinzip:
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
- einer oder mehrere scharfen Einganswerte (X1..Xn) gehen hinein,
- werden unscharf gemacht (Fuzzifizierung)
- Mit WENN / DANN-Regeln unscharf behandelt (Interferenz)
- scharf gemacht (Defuzzifizierung)
- der scharfer Ausgangswert (Y) geht hinaus.
8
2.2 Ein einfaches Beispiel
2.2.1 Die Ausgangssituation
Regelung einer Bremsanlage eines
Autos auf einer Autobahn
Eingänge :
A - Abstand zum Vordermann
G - aktuelle Geschwindigkeit
Ausgang :
K - Bremskraft
Scharfe Eingangswerte:
A = 175 m
G = 190 km/h
Gesucht ist die scharfe
Ausgangsgröße
K=?%
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
9
2.2.2 Fuzzifizierung
- Überführung eines scharfen Signalwertes auf den dazugehörigen Fuzzy-Signalwert
- allgemein
A*=( µsehr_niedrig(A); µniedrig(A); µmittel(A); µhoch(A); µsehr_hoch(A) )
G*=( µsehr_niedrig(G); µniedrig(G); µmittel(G); µhoch(G); µsehr_hoch(G) )
hier :
A*=( 0; 0,75; 0,25; 0; 0 )
G*=( 0; 0; 0; 0; 1)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
10
2.2.3 Interferenz
Verarbeitungsvorschriften
hier nur der Einfachheit 2 Regeln die auch beide aktiv sind, meist sind es aber ganze Gruppen
WENN / DANN -Prinzip
R1: WENN A=mittel UND G=sehr_hoch DANN K=dreiviertel
R2: WENN A=niedrig UND G=sehr_hoch DANN K=voll
Ermittlung der einzelnen Ausgangs-Fuzzy-Mengen
Dies ergibt
H1= MIN ( µA mittel(175m); µG sehr_hoch(190 km/h ) )= MIN (0,25; 1) = 0,25
H2= MIN ( µA niedrig(175m); µG sehr_hoch(190 km/h ) )= MIN (0,75; 1) = 0,75
Das heißt
K= „dreiviertel“ (K=70%) hat einen Wahrheitsgehalt von 0,25
K= „voll“ (K=100%) hat einen Wahrheitsgehalt von 0,75
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
11
Max-Min-Interferenz
Die Fuzzy-Menge K= „dreiviertel“ wird bei 0,25 abgeschnitten
Die Fuzzy-Menge K= „voll“ wird bei 0,75. abgeschnitten.
Zusammenfassen der resultierenden Fuzzy-Mengen zu einer resultieren mit dem MAX-Operator (Vereinigung).
Dies ergibt die resultierende Ausgangs-Fuzzy-Menge µK res(dunkel eingefärbt)
Aus dieser Menge muss man nun einen scharfen Ausgangswert bestimmen:
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
12
2.2.4 Defuzzifizierung
am Beispiel der genäherten Schwerpunktmethode
Es gibt noch eine Handvoll anderer Methoden, das ist aber das gebräuchlichste
mehr dazu im Nächsten Teil]
Aus der gilt es mit der Defuzzifizierung einen scharfen Wert zu machen.
- Allgemein
m
H
yres =
i 1
m
i
H
i 1
yi
i
hier
Kres
y1 *H1 y 2 * h 2
70 % * 0,25 100 % * 0,75
=
=
H1 H 2
( 0,25 0,75)
= 92,5 %
K= 92,5 % ist dann die aus den scharfen Eingangswerten resultierende Bremskraft.
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
13
2.2.5 Das ganze Beispiel mal in Kurzform
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
14
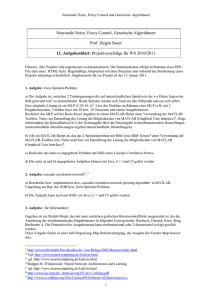
2.3 „FLOP“ (Fuzzy Logic Operating Program)
Winfact selbst ist eine komplette Entwicklungsumgebung für den Entwurf, und die Simulation komplexer Regler.
Flop ist ein Teilprogramm von Winfact und speziell für Fuzzy-Regler gedacht. Das Programm ist dabei sehr
anschaulich und übersichtlich. Dummerweise erlaubt die Demo nicht das speichern von erstellten Beispielen .
Deshalb ein ähnliches Beispiel wie oben, lediglich andere Wertebereiche und mehr Regeln. Das vorherige
Beispiel war auf 2 Regeln beschränkt beide aktiv hier sind volle 25 Regeln vorhanden (2 Eingänge à 5 FuzzyMengen = 25 mögliche Regeln).
Folgendes Bild
Das Hauptfenster von FLOP
- Links die Modellübersicht
- Eingänge: Abstand und Geschwindigkeit ( l.o., r.o. )
- Ausgang : Bremskraft (l.u.),
- Kennfeld der Bremskraft in Abhängigkeit von Abstand und Geschwindigkeit (r.u.)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
15
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
16
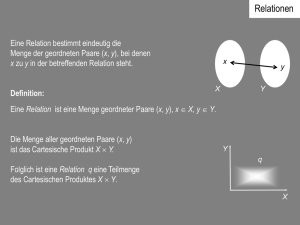
Regelbasen (Abstand und Geschwindigkeit sind mit UND verknüpft)
z.B. WENN Abstand= „mittel“ UND Geschwindigkeit = „mittel“ DANN Bremskraft= „halb“
Einstellung der Parameter der einzelnen Fuzzy-Sets (Typ: Dreiecksförmig, Trapezförmig, Singleton)
z.B. hier: Abstand=“sehr_niedrig“ ist dreiecksförmig und geht von 0 bis 25 (Meter)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
17
2.4 Alternative Methoden der Verarbeitung:
Regelverknüpfung
Verknüpfung der Regeln mit den Verschiedenen UND / ODER Normen
Die Normen wurden ausführlich bereits im 1. Vortrag erläutert.
(Menu : Interferenz / Operatoren)
Interferenzmechanismen
Max-Min-Interferenz
(wurde gezeigt)
MAX-PROD- Interferenz
(ist eher unüblich)
Resultierende Fuzzy-Menge wird oberhalb des
Erfüllungsgrades Hi abgeschnitten
Resultierende Fuzzy-Menge wird mit dem
Erfüllungsgrad Hi multipliziert
(Menu : Interferenz / Interferenzmechanismus)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
18
Weitere Defuzzifizierungsmethoden
Defuzzifizierungsmethoden die FLOP anbietet
(Menu : Interferenz / Defuzzifizierung)
Die letzten 4 Methoden lassen sich leicht nachvollziehen.
Die Näherung der Scherpunktmethode siehe oben.
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
19
Auf weitere Methoden einzugehen würde hier zu weit gehen, nur soviel sei gesagt:
Unterschiedliche Methoden haben alle spezifische Eigenschaftem, und Vor- und Nachteile.
Je nach dem resultiert der typische Einsatz.
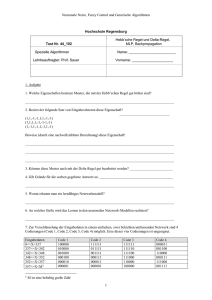
Beispiel Unterschiede in der Defuzzifizierung Anhand des E/A-Diagramms
Schwerpunktmethode
Ideal für STETIGE Stellwerte
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
Methode der maximalen Höhe
Ideal für DISKRETE Stellwerte
20
3. Der Hintergrund
3.1 Allgemeines zu Fuzzy-Control
- Fuzzy-Controller Sie weisen meist ein relativ lineares Verhalten beim Regeln auf.
(Siehe Kennfelder in FLOP)
- Aufgrund des simplen Konzepts sind sie sehr robust gegenüber Störeinflüssen
- Mit Relativ wenig Aufwand lassen sich komplexe Regler günstig und einfach Implementieren,
- Sie bieten ein sehr gutes Preis-Leistungsverhältnis jedoch auf Kosten der Genauigkeit der Regelung.
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
21
3.2 Anwendungsgebiete
- Bei Konsumartikeln
Bei ganz gewöhnlichen Artikeln des täglichen Konsums sitzt das größte Potential für Fuzzy-Control weil
Mit Fuzzy-Control einfache und GÜNSTIGE Lösungen bietet.
In Japan existieren schon seit längerem eine Vielzahl von Anwendungen in allen möglichen Konsumartikeln,
in anderen Ländern ist die Entwicklung eher zögerlich.
Beispiel Waschmaschine :
Es ist möglich, dass eine Waschmaschine anhand von 2 Systemgrößen ( Beladung der Maschine,
Verschmutzungsgrad des Wassers) und ganzen 6 Regeln das optimale Waschprogramm berechnet.
Außerdem: Unwuchtkontrolle mit Fuzzy-Logik.
Weiterhin:
verwackelsichere Camcorder, basierend auf einer Fuzzy- gestützten Entfernungseinstellung,
Staubsauger mit Verschmutzungserkennung, Eierkocher usw.
- In der Fahrzeugtechnik
Bei Antiblockiersystemen, Tempomaten , intelligenten Kupplungen für Automatikgetriebe
- In der Robotik
- In der Prozesstechnik
Meist nichtlineare, kompliziertere Systeme.
Die Modellbildung meist nur strukturell möglich (Dafür gibt’s Experten)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
22
3.3 Einsatzziele von Fuzzy-Control:
- Indirekte Messung von Systemgrößen
- Identifikation von Systemen, z.B. in der Mustererkennung
Man kann nach den oben genannten Schema mit minimalsten Aufwand mit guter Zuverlässigkeit
Muster identifizieren. Dies spielt auch in der Überwachung von Prozessen eine große Rolle.
- Verbesserung der Systemdynamik durch Steuerung und Regelung
- Überwachung technischer Prozesse (Fuzzy-Supervision)
Hier werden oft Prozesse die vorher oft "nach Erfahrung" reguliert wurden, in Fuzzy-Control umgesetzt.
Meist kann dadurch das Systemverhalten deutlich optimiert werden.
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
23
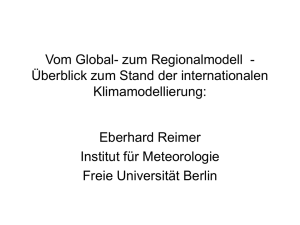
4. Ein Beispiel in JAVA
Die Aufgabe :
Steuerung des Roboters durch den Raum.
Dabei werden selbst gesetzte Hindernisse erkannt und umgangen.
Eingangsgrößen:
Abstand zum nächsten Hindernis,
Auftreffwinkel in Grad
Regeln :
9 Stück, mit UND verknüpft
Ausgangsgrößen:
Richtungsänderung in Grad
Bedeutung der
linguistischen Terme:
NB
NM
NS
Z
PS
PM
PB
Negative Big
Negative Medium
Negative Small
Zero
Positive Big
Positive Medium
Positive Small
(international am geläufigsten linguistischen Terme)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
24
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
25
5. Quellen:
1. Fuzzy Logic - Fuzzy Control (Kahlert / Frank)
2. Winfact 6 Demo, speziell das Tool FLOP von http://www.kahlert.de
3. Skript Neuronale Netze und Fuzzy- Control- Systeme (Prof. Jürgen Sauer)
http://rfhs8012.fh-regensburg.de/~saj39122/
4. JAVA-Applet der Robotersteuerung (neben rund 30 weiteren)
http://rfhs8012.fh-regensburg.de/~saj39122/vhb/NN-Script/script/gen/k0301020302.html
5. Einführung in die Fuzzy-Methoden (Bandemer / Gottwald)
6. Fuzzy-Logic and Fuzzy-Control (Driankov / Eklund / Ralescu)
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
26
Zusatz
(wegen Zeitmangels weggelassen)
Aufbau eines Regelkreises
Ziel: Die Anpassung des Sollwertes an den Istwert
- Führungsgröße w (Sollwert)
- von der Messeinrichtung gemessene Messwert x
- Vergleicher (Differentiator) bestimmt die Abweichung xw=x-w
- Steuer- und Regeleinrichtung berechnet daraus den Stellwert y
- Störgrößen z beeinflussen diesen
- Ausgangswert (Regelwert) - geht raus
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
27
Der Fuzzy-Controller im Regelkreis
Fuzzy-Regelungssysteme weisen grundsätzlich die gleichen Strukturen auf, wie konventionelle Regelkreise
Der Fuzzy-Controller besteht aus den Komponenten Fuzzifizierung, Interferenzmechanismus, Defuzzifizierung
Fuzzy Control, Ronny Vorpahl, Stand 30.6.2002
28