Robotik in der Medizin
Werbung

Hauptseminar Roboter Navigation
Kartenerstellung nach Gutmann
Vortrag:
Gunther Klein
25. Januar 2002
Inhalt
1. Einführung
2. Konsistente Positionsschätzung
3. LRGC-Verfahren nach Gutmann
25.01.2002
Inhalt
Folie 2/31
Gründe für Kartenerstellung
1. Selbstlokalisierung
2. Eintragen wichtiger Positionen (Postfach, Kaffeemaschine, ...)
3. Pfadplanung
25.01.2002
1. Einführung
Folie 3/31
Kartenbegriffe
• Topologisch korrekte Karten:
enthaltene Beobachtungen und zugehörige Objekte sind
identisch (nur sehr wenig Odometriefehler).
• Konsistente Karten:
entspricht realer Umgebung (zB. Keine Wand darf mehrfach
vorkommen)
Ziel: topologisch korrekte und konsistente Karten!
25.01.2002
1.Einführung
Folie 4/31
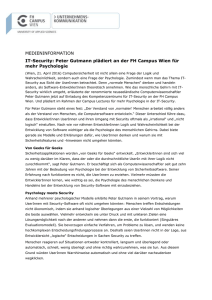
Kartenbegriffe
Beispiel: topologisch korrekte, aber nicht konsistente Karte
25.01.2002
1. Einführung
Folie 5/31
Problematik der Kartenerstellung
• Konkurrenzproblem:
Integration neuer Daten in Karte über Roboterposition
Bestimmung der Roboterposition mit Hilfe der Karte
• Problem zyklischer Umgebungen
25.01.2002
1. Einführung
Folie 6/31
Verfahren mit lokaler Aktualisierung
• inkrementelle Integration von Sensordaten durch
Überdeckung mit Karte/vorherigem Sensorbild
• Positionsbestimmung durch Mittelung/Kalman-Filter
• Probleme: - Inkonsistenz (bes. bei Zyklen)
- feste Integration der Daten
• Beispiel
• Besser: Konsistente Repräsentation der Umgebung
25.01.2002
1. Einführung
Folie 7/31
Verfahren für zyklische Umgebungen
• Entfernungsdaten als Objekte
• Referenzierung in globalem Koordinatensystem
• Bei Objekterkennung Aktualisierung der Roboterposition
• Rückwärtspropagierung innerhalb der Schleife
• Probleme: - Objekterkennung
- keine globale Konsistenz
25.01.2002
1. Einführung
Folie 8/31
Konsistente Positionsschätzung
• von Lu & Milios entwickelt
• konsistente Karten in zyklischen Umgebungen
• nicht-inkrementeller Ansatz
• Scan-Positionen als Knoten eines Netzwerks
• Herleitung von Beziehungen zwischen den Positionen:
- Odometrie (weak-links)
- Scan-Matching (strong-links)
25.01.2002
2. Konsistente Positionsschätzung
Folie 9/31
Aufbau eines Netzwerks
25.01.2002
2. Konsistente Positionsschätzung
Folie 10/31
Aufbau eines Netzwerks
25.01.2002
2. Konsistente Positionsschätzung
Folie 11/31
Aufbau eines Netzwerks
Grundidee:
• Netzwerk aufbauen:
• Positionen als Knoten (freie Variablen)
• Beziehungen als Kanten Feder:
minimale Energie <=> Positionen = Beziehungen
• Aufstellen einer Fehlersumme:
berechnet Gesamtenergie
Bestimmung der Positionen, so dass Gesamtenergie minimal
25.01.2002
2. Konsistente Positionsschätzung
Folie 12/31
Optimierungsproblem
• Positionen als freie Variablen X 0 , X 1 ,..., X n
wobei X i ( x , y , ) t , i {0,.., n}
• Kanten: Dij X i X j
• Beobachtung von Dij : Dij Dij Dij (Odometrie, ScanMatching)
• Dij : gaussverteilter Fehler mit Cij
• Ziel: Optimale Schätzung der X i
25.01.2002
2. Konsistente Positionsschätzung
Folie 13/31
Optimalitätskriterium
Kriterium: minimale Varianz
=> Minimierung der Mahalanobis-Distanz:
W ( Dij Dij ) Cij ( Dij Dij );
T
1
(i , j )
W ( X i X j Dij ) T Cij ( X i X j Dij );
1
(i , j )
W
0;
X
25.01.2002
Auflösen nach X .... X G 1 B
2. Konsistente Positionsschätzung
Folie 14/31
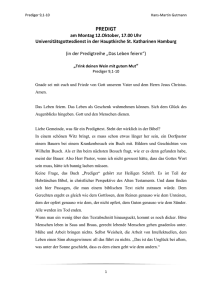
Beispiel: Universität Toronto (29 x 30 m)
25.01.2002
2. Konsistente Positionsschätzung
Folie 15/31
Resultat
• hohe Laufzeit, wegen Invertierung O(n³)
• nicht echtzeitfähig
• Scan-Matching benötigt topologisch korrekte Daten
• noch besser: inkrementeller Ansatz
25.01.2002
2. Konsistente Positionsschätzung
Folie 16/31
LRGC-Verfahren nach Gutmann
• LRGC: “Local Registration and Global Correlation”
• benutzt 3 Techniken:
1. Scan-Matching
2. Konsistente Positionsschätzung
3. Kartenkorrelation
• inkrementelles Verfahren
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 17/31
Grundidee
• Geg.: Konsistente Karte, neue Position ln
• Beziehungen nur über kurze Distanzen -> lokale Aktualisierung
• bei Schliessen eines Zyklus: globale Aktualisierung
-> Kartenkorrelation
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 18/31
Scan-Matching
• IDC-Algorithmus:
- in nicht-pologonalen Umgebungen besser
- polygonale Umgebungen: zu optimistisch
• Cox-Algorithnus: bessere Laufzeit
=> kombinierter Scan-Matching-Algortihmus (Cox + IDC):
Entscheidungslogik bzgl. Umgebung
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 19/31
Konsistente Positionsschätzung
1. zum Erstellen lokaler Kartenstücke aus den letzten k Scans
2. zum Schliessen von Zyklen nach Kartenkorrelation
Vergleich lokale/globale
Aktualisierung abhängig
von k ->
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 20/31
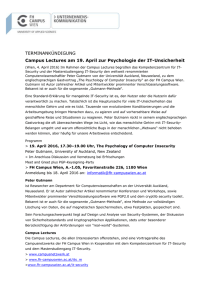
Konsistente Positionsschätzung
Durchschnittliche Positionsfehler bei schwierigen Scans für
K=5 und K=10
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 21/31
Konsistente Positionsschätzung
Beurteilung:
• konstanter Rechenaufwand (da k konstant)
• Rechenaufwand unabhängig von Kartengrösse:
< 100ms in typischen Situationen
• für Schliessen eines Zyklus Optimierung notwendig:
selbst für grosse Zyklen Laufzeit < 10s
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 22/31
Kartenkorrelation
• Schliessen von Zyklen
• keine Historie
• läuft im Hintergrund
Bayes:
p(l| r , m) k p(r| l , m) p(l , m)
r: lokales Kartenstück
m: Karte
l: Roboterposition
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 23/31
Kartenkorrelation
p(r| l , m) Corr (r , m) p(ri ) p(mi )
i
p(l , m) p(l )
für k Filter verwenden:
1. Hoher Überdeckungswert => k gross
2. Keine Mehrdeutigkeiten => steile Peaks
3. Niedrige Varianz
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 24/31
Kartenkorrelation: Beispiel
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 25/31
LRGC-Algorithmus
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 26/31
Anmerkungen zum LRGC-Algorithmus
• Beschränkung des Suchbereichs bei Kartenkorrelation
• Suchbereich wächst mit Positionsunsicherheit
• lineare Anpassung der lokalen Kartengrösse (k) an Positionsunsicherheit
• Schliessen eines Zyklus: Suchgrösse und k verringern sich
• weitere Optimierung möglich
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 27/31
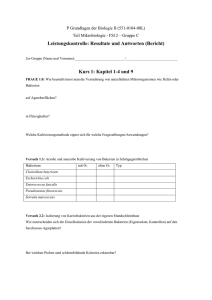
Bsp: Wean Hall der Carnegie Mellon University
• B21-Roboter mit 180° Laserscanner
• Umgebung: 80 mal 25 m, längster Zyklus 200 m
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 28/31
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 29/31
Bewertung
• inkrementelles Verfahren
• zusätzlicher Aufwand nur beim Schliessen eines Zyklus
• Algortihmus benötigt gute Scan-Matching-Resultate
• robuste Erkennung topologischer Zusammenhänge
• mögliche Erweiterung: Roboterteam
25.01.2002
3. LRGC-Verfahren nach Gutmann
Folie 30/31
Vielen Dank für Ihre Aufmerksamkeit!
25.01.2002
Ende
Folie 31/31