Lösung 3
Werbung

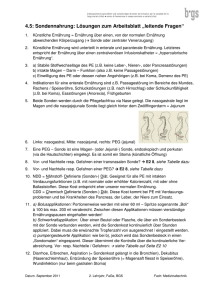
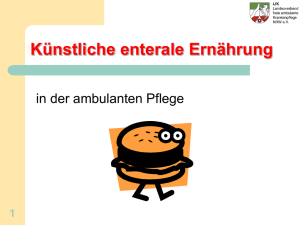
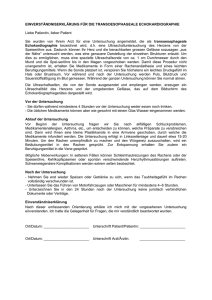
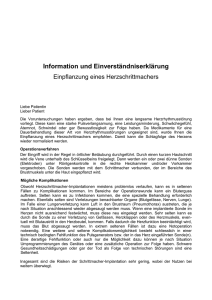
Allgemeine Mechanik Musterlösung 3. Übung 1. HS 2014 Prof. Thomas Gehrmann Umlaufbahnen für Zweikörperprobleme Die Bewegungsgleichung von zwei Körpern in einem zentralwirkendem Kraftfeld, U (r) = −α/r, lautet wie folgt: Z dr q , (1) t= 2 L2 µ E − U (r) − µ2 r 2 wobei µ die reduzierte Masse, U (r) das zentrale Kraftpotential, r der absolute Abstand zwischen den Körpern und L das Drehimpuls der beiden Körper ist. Führe für die beiden Fälle (a) E = 0 (b) E > 0 die Integration ohne Einfürung der Winkelvariablen φ mit Hilfe geeigneter Variablensubstitutionen r = r(η) durch, um zunächst t(η) zu erhalten. Bestimme mit Hilfe der allgemeinen Lösungsform der Umlaufbahnen x(η) und y(η). Lösung. (a) Da E = 0 und U = −α/r, gilt Z t= rdr q 2α µ r − L2 µ2 (L.1) Durch die Variablensubstitutionen, r= wobei p = L2 µα p L2 (1 + η 2 ) = (1 + η 2 ), 2µα 2 (L.2) erhält man r η2 µp3 η (1 + ). α 2 3 Die allgemeine Form der Umlaufbahnen ist gegeben durch s p 2EL2 = 1 + e cos φ, e = 1 + , r µα2 t= (L.3) (L.4) wobei e die Exzentrizität der Kurve ist. Für E = 0 erhält man e = 1. Weiter gilt für kartesische Koordinaten x = r cos φ, y = r sin φ, wenn die x-Achse parallel zur Hauptachse der Parabel ist. Daraufhin erhält man p p x = p − r = p − (1 + η 2 ) = (1 − η 2 ). 2 2 √ Für y hat man dann durch y = r2 − x2 , y = pη. Je nach Variablensubstitution sind auch andere Lösungen möglich. 1 (L.5) (L.6) (b) Der zweite Fall wird analog zum ersten gelöst. r Z Z r µ rdr µa rdr q p t= = , 2 2|E| α (r + a)2 − a2 e2 r2 + α r − L |E| (L.7) 2µ|E| wobei a = α/2E ist. Durch die Variablensubstitution, r = a(e cosh η − 1), (L.8) erhält man dann r t= µa3 α r Z (e cosh η − 1)dη = Nun gilt a= e2 µa3 (e sinh η − η). α p α = . −1 2E (L.9) (L.10) Dann erhält man ex = p − r = a(e2 − 1) − a(e cosh η − 1) = ae(e − cosh η). (L.11) Woraufhin p y = a e2 − 1 sinh η. x = a(e − cosh η), Übung 2. (L.12) Reise zum Mars Die Sonde “Mariner4” sollte in einer elliptischen Umlaufbahn, mit Perihel auf der Erde (E) und Aphel auf dem Mars (M), von der Erde zum Mars fliegen (siehe Graphik). Nehme an, dass sowohl die Erde als auch der Mars in einer kreisförmigen Umlaufbahn gegen den Uhrzeigersinn um die Sonne (S) kreisen. Die entsprechende Radii für die Umlaufbahnen der Erde und des Mars betragen dabei jeweils RE = 150 · 106 km und RM = 230 · 106 km. Gravitative Effekte der Planeten auf die Sonde sind vernachlässigbar. Mariner4 M θ r RE E S RM (a) Bestimme Mariner4’s potentielle und kinetische Energie im Gravitationsfeld der Sonne, wobei m die Masse der Sonde und M = 2 · 1030 kg die Masse der Sonne ist. 2 (b) h = r2 θ̇ ist eine Konstante, wobei r der Radius und θ der polare Winkel der Sonde in ihrer Sonnenumlaufbahn sind (siehe Graphik). Bestimme die Energie der Sonde in Abhängigkeit von h am Perihel (r minimal) und am Aphel (r maximal). Benutze das Prinzip der Energieerhaltung um h zu bestimmen. (c) Bestimme die absolute Geschwindigkeit, v, der Sonde am Perihel. (d) Angenommen die Sonde wird tangential und augenblicklich zur Sonnenumlaufbahn der Erde von der Erde abgeschossen. Bestimme die absolute Anfangsgeschwindigkeit der Sonde relativ zur Erdoberfläche, um die beschriebene Umlaufbahn zu erreichen? (e) Mit welcher absoluten Geschwindigkeit relativ zur Oberfläche des Mars wird die Sonde ihr Ziel erreichen? (f ) Was ist die Periode von Mariner4’s Umlaufbahn? (g) Wie lange dauert die Reise der Sonde? Lösung. (a) Mariner4 wird nur durch die Gravitationskraft der Sonne beeinflusst, deshalb haben wir E= mṙ2 mr2 θ̇2 GmM + − . 2 2 r (L.13) (b) Am Perihel und Aphel gelten jeweils ṙ = 0, r = RE und ṙ = 0, r = RM . Aus der Energieerhaltung ergibt sich dann E= −GmM mh2 mh2 −GmM + + = 2 2 . RM RE 2RM 2RE (L.14) Daraus folgt für h, r h= 2GM RM RE . RM + RE (L.15) (c) Da h = r2 θ̇ und ṙ = 0 am Perihel, gilt h = r(rθ̇) = RE v. (L.16) Daraus folgt s v= 2GM RM . RE (RM + RE ) (L.17) Und für G = 6.7 · 10−11 m3 kg−1 s−2 erhält man v = 32.885kms−1 . (d) Da Mariner4 tangential zur Sonnenumlaufbahn der Erde abgeschossen wird, wird folgende absolute Geschwindigkeit relativ zur Erde vr benötigt: s r 2GM RM GM − ≈ 3kms−1 . (L.18) vr = v − vE = RE (RM + RE ) RE (e) Analog wird die absolute Ankunftsgeschwindigkeit berechnet: s r 2GM RE GM 0 0 vr = v − vM = − ≈ 2.7kms−1 . RM (RM + RE ) RM 3 (L.19) (f) Aus dem dritten Keplerschen Gesetz folgt RE + RM 3 −3 RE , 2 ≈ 1.43 Jahre. T 2 = TE2 T (L.20) (g) Die Reisezeit der Sonde beträgt dann t = T /2 = 0.7 Jahre. Übung 3. Supernova in einem Zweisternsystem Zwei Sterne mit jeweiliger Masse M und m, separiert durch eine Distanz d, rotieren in kreisförmigen Umlaufbahnen um ihren gemeinsamen Schwerpunkt (MS), wobei beide Sterne als punktförmige Objekte angenommen werden können. In einer Supernovaexplosion verliert der Stern der Masse M eine Masse ∆M . Die Explosion geschieht plötzlich, ist sphärisch-symmetrisch und übt dabei weder Reaktionskräfte auf das Überbleibsel der Supernova noch auf den anderen Stern aus. Zeige, dass das Stern-SupernovaüberbleibselSystem im Falle von, M +m , (2) ∆M < 2 nach der Explosion gebunden ist. Die untere Graphik zeigt das System unmittelbar nach der Explosion, wobei sich nun der MS mit einer Geschwindigkeit v fortbewegt. r1 ω M − ∆M r1 ω MS r2 m v r2 ω Hinweis: Ermittel die potentielle und kinetische Energie der zwei Körper in dem Masseschwerpunktssystem nach der Explosion, benutzte T + V < 0 als Bedingung für ein gebundenes System. Lösung. Es gilt, md Md , r2 = . (L.21) M +m M +m Vor der Explosion bewegen sich die Sterne in kreisförmigen Umlaufbahnen mit Winkelgeschwindigkeit ω, daher haben wir r1 + r2 = d, r1 = M r1 ω 2 = GM m GM m mr2 ω 2 = , d2 d2 oder ω2 = G(M + m) . d3 4 (L.22) (L.23) Betrachtung der potentiellen Energie V sowie kinetischen Energie T ergibt dann im neuen Massenschwerpunktsystem: −G(M − ∆M )m) d 2 (M − ∆M )(r1 ω) ) (m)(r2 ω)2 ) T = + − T0 , 2 2 V = (L.24) (L.25) mit T0 gleich der kinetischen Energie auf Grund der Bewegung des MS nach der Explosion. Die Geschwindigkeit des MS nach der Explosion wird bestimmt durch (M − ∆M + m)v = mr2 ω − (M − ∆M )r1 ω = r1 ω∆M. (L.26) Durch die Konfiguration der Sterne vor der Explosion weiss man, dass mr2 ω − M r1 ω = 0. (L.27) Deshalb hat man T +V G(M − ∆M ) 1 1 m + (M − ∆M )(r1 ω)2 + m(r2 ω)2 d 2 2 (∆M )2 1 (r1 ω)2 − (M − ∆M + m) · 2 (M − ∆M + m)2 1 Gm∆M GM m 1 + M (r1 ω)2 + m(r2 ω)2 + − d 2 2 d 2 2 1 (∆M ) (r1 ω) − ∆M (r1 ω)2 − 2 2(M − ∆M + m) GM m Gm∆M 1 (∆M )2 (r1 ω)2 − + − ∆M (r1 ω)2 − 2d d 2 2(M − ∆M + m) 1 (∆M )2 (r1 ω)2 1 − M dr1 ω 2 + dr1 ω 2 ∆M − ∆M (r1 ω)2 − 2 2 2(M − ∆M + m) 1 (∆M )2 r1 − r1 ω 2 M d − 2d∆M + r1 ∆M + 2 (M − ∆M + m) 2 dr1 ω − (2∆M − M − m)(∆M − M ). 2(M − ∆M + m) = − = = = = = (L.28) (L.29) (L.30) (L.31) (L.32) (L.33) (L.34) Die Bedingung, dass das neue System gebunden ist, lautet T + V < 0, i.e. 2∆M < M + m, ∆M < M, (L.35) 2∆M > M + m, ∆M > M. (L.36) oder Da ∆M < M benötigt man ∆M < M +m . 2 5 (L.37)