Gleichstrommaschine
Werbung

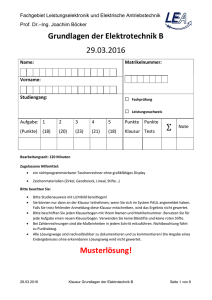
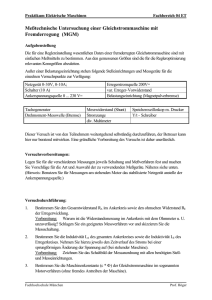
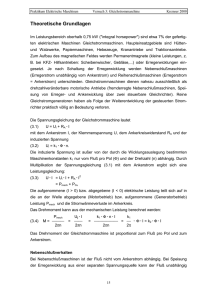
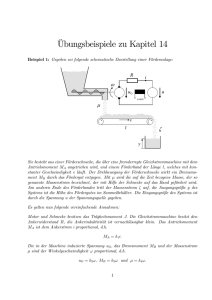
Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Laborpraktikum Versuch Gleichstrommaschine (GM) SS 2012 SS 2012 Datum: 10-04-2012 Seite 1 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Datum: 10-04-2012 SS 2012 Datum: 10-04-2012 Seite 2 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Inhaltsverzeichnis Inhaltsverzeichnis .................................................................................................................................... 3 Abbildungsverzeichnis ............................................................................................................................. 4 Tabellenverzeichnis ................................................................................................................................. 4 1 Einleitung ......................................................................................................................................... 5 2 Aufbau und Baugruppen ................................................................................................................. 6 3 Ausführungsformen von Gleichstrommaschinen............................................................................ 8 4 3.1 Fremderregte Gleichstrommaschine ...................................................................................... 8 3.2 Gleichstromnebenschlussmaschine ...................................................................................... 10 3.3 Gleichstromreihenschlussmaschine ...................................................................................... 10 Betriebsverhalten der Gleichstrommaschine................................................................................ 12 4.1 Anlaufverhalten der fremderregten Gleichstrommaschine und der Gleichstromnebenschlussmaschine .................................................................................................. 12 4.2 Belastungsmaschine .............................................................................................................. 12 5 Versuchsvorbereitung ................................................................................................................... 13 6 Versuchsdurchführung .................................................................................................................. 15 6.1 Motorbetrieb der Gleichstromnebenschlussmaschine ......................................................... 15 6.2 Drehzahlsteuerung der Gleichstromnebenschlußmaschine ................................................. 18 6.3 Die Belastungskennlinie der Gleichstromnebenschlussmaschine ........................................ 22 6.4 Betrieb der Gleichstromreihenschlussmaschine ................................................................... 25 6.5 Die Belastungskennlinie der Gleichstromreihenschlussmaschine ........................................ 29 7 Literatur ......................................................................................................................................... 31 8 Daten der Gleichstrom-Mehrfunktionsmaschine 0,3 kW ............................................................. 32 SS 2012 Datum: 10-04-2012 Seite 3 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildungsverzeichnis Abbildung 2.1: Baugruppen einer Gleichstrommaschine ....................................................................... 6 Abbildung 3.1: Elektrisches Ersatzschaltbild der fremderregten Gleichstrommschine .......................... 8 Abbildung 3.2: Elektrisches Ersatzschaltbild der Gleichstromnebenschlussmaschine ......................... 10 Abbildung 3.3: Elektrisches Ersatzschaltbild der Gleichstromreihenschlussmaschine ......................... 11 Abbildung 6.1: Schaltplan Gleichstromnebenschlussmotor ................................................................. 15 Abbildung 6.2: Aufbauplan Gleichstromnebenschlussmotor ............................................................... 16 Abbildung 6.3: Schaltplan Gleichstromnebenschlussmotor „Drehzahlsteuerung“ .............................. 19 Abbildung 6.4: Aufbauplan Gleichstromnebenschlussmotor „Drehzahlsteuerung“ ............................ 20 Abbildung 6.5: Schaltplan Gleichstromnebenschlussmotor „Belastungskennlinie“ ............................. 23 Abbildung 6.6: Aufbauplan Gleichstromnebenschlussmotor „Belastungskennlinie“ ........................... 24 Abbildung 6.7: Schaltplan...................................................................................................................... 26 Abbildung 6.8: Schaltskizze ................................................................................................................... 27 Tabellenverzeichnis Tabelle 6.1: Messwerte Belastungskennlinie Gleichstromnebenschlussmotor.................................... 18 Tabelle 6.2 : Messwerte Kennlinie „𝐼𝐴“ und „𝑛“ in Abhängigkeit von „𝑈𝐴 ......................................... 21 U Tabelle 6.3: Messwerte Kennlinie „𝐼𝐹“ und „𝑛“ in Abhängigkeit von 𝑅𝐹 ............................................ 22 U Tabelle 6.4: Tabelle ............................................................................................................................... 29 SS 2012 Datum: 10-04-2012 Seite 4 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 1 Einleitung Die Starkstromtechnik nahm mit der Energieerzeugung durch galvanische Elemente ihren Anfang. Da durch die galvanischen Elemente Gleichspannung bereitgestellt wird, entstand als erster elektromechanischer Energiewandler die Gleichstrommaschine. Bereits 1834 wurde durch Jakobi der erste Gleichstrommotor mit Kommutator (Stromwender) gebaut. Einen wesentlichen Beitrag für den Erfolg der Gleichstrommaschine leistete die Entdeckung des dynamoelektrischen Prinzips 1 durch Werner von Siemens im Jahre 1866. Mit der Einführung des Drehstroms ab 1889 verlor die Gleichstrommaschine an Bedeutung, konnte aber, begünstigt durch die Entwicklung der Stromrichtertechnik und die guten Regeleigenschaften, einen bedeutenden Marktanteil im Bereich der drehzahlgeregelten Antriebe behaupten. In jüngster Zeit erreichen Umrichtergespeiste Drehstromantriebe ähnlich gute Regeleigenschaften, so dass Gleichstrommotoren immer mehr an Bedeutung verlieren, wenngleich diese immer noch wichtige Anwendungsfelder, insbesondere im Kleinleistungsbereich, besetzen. An einer Gleichstrommaschine können wesentliche Wirkprinzipien und Eigenschaften elektrischer Maschinen erklärt werden, so dass sie in diesem Praktikum näher betrachtet werden sollen. Bei Gleichstrommaschinen werden verschiedene Ausführungsformen unterschieden. Im Rahmen dieses Praktikums soll das Betriebsverhalten einer Gleichstromnebenschluss- und einer Gleichstromreihenschlussmaschine untersucht werden. Das Betriebsverhalten von elektrischen Maschinen wird u.a. durch Belastungskennlinien charakterisiert. Solche Belastungskennlinien bilden das Drehmoment über der Drehzahl ab. Die Aufzeichnung von Belastungskennlinien ist ein Ziel dieses Praktikums. 1 1866 erkannte Werner von Siemens, dass im Eisen des Erregerkreises eines Generators ein geringer Magnetismus zurückbleibt. Dieser reicht aus, um eine, zunächst schwache Spannung im rotierenden Anker zu induzieren. Der dadurch hervorgerufene Strom lässt sich nutzen, um das Erregerfeld fortschreitend bis zur Sättigung zu verstärken. SS 2012 Datum: 10-04-2012 Seite 5 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 2 Aufbau und Baugruppen Abbildung 2.1: Baugruppen einer Gleichstrommaschine Das Wirkprinzip der Gleichstrommaschine beruht auf der Lorenzkraft auf eine mit der Geschwindigkeit v bewegte Ladung 𝑞. 𝐸 und 𝐵 sind die Elektrische Feldstärke und die magnetische Flussdichte: 𝐹𝐿 = 𝑞(𝐸 + 𝑣 × 𝐵) (Gl. 2.1) Ist kein äußeres elektrisches Feld vorhanden und betrachtet man den Sonderfall eines Leiters der Länge 𝑙, der senkrecht zum äußeren Magnetfeld verläuft und vom Strom 𝐼 durchflossen wird und so ergibt sich für die Kraft 𝐹 =𝐵⋅𝑙⋅𝐼 Die Erzeugung des Magnetfelds erfolgt (Gl. 2.2) durch die Erregerwicklung eines Elektromagneten, die sich auf dem Hauptpol des feststehenden Ständers aus geblechtem Eisen befindet. Der durch die Erregerwicklung hervorgerufene magnetische Fluss durchsetzt den Luftspalt und den Anker. Auf dem Anker befinden SS 2012 Datum: 10-04-2012 Seite 6 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) sich Leiter, die von dem Ankerstrom 𝐼𝐴 durchflossen werden. Die Stromzufuhr muss dabei so erfolgen, dass alle Ankerleiter, die sich im Bereich des gleichen magnetischen Poles befinden, gleichsinnig vom Ankerstrom durchflossen werden. Zur kontinuierlichen Drehmomenterzeugung ist es nötig, dass beim durch die Drehung des Motors hervorgerufenen Übergang der Ankerleiter von einem Polbereich auf den Nächsten die Stromrichtung in den jeweiligen Ankerleitern umgekehrt werden muss. Die Stromumkehr erreicht man durch den Kommutator (auch Stromwender oder Kollektor genannt). Für eine ausführliche Beschreibung sei auf Absatz 7 verwiesen. SS 2012 Datum: 10-04-2012 Seite 7 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 3 Ausführungsformen von Gleichstrommaschinen 3.1 Fremderregte Gleichstrommaschine Bei der fremderregten Gleichstrommaschine werden Erregerwicklung und Ankerwicklung unabhängig voneinander mit elektrischer Energie versorgt. Die Erregung kann auch durch Permanentmagnete erfolgen. Abbildung 3.1: Elektrisches Ersatzschaltbild der fremderregten Gleichstrommschine Für die Maschengleichung des Ankerkreises ergibt sich 𝑢𝐴 = 𝑅𝐴 𝑖𝐴 + 𝐿𝐴 𝑑𝑖𝐴 + 𝑢𝑖𝐴 𝑑𝑡 (Gl. 3.1) mit dem Ankerwiderstand 𝑅𝐴 , der Ankerinduktivität 𝐿𝐴 und der induzierten Gegenspannung 𝑢𝑖𝐴 (auch Elektro-Motorische-Kraft, EMK genannt). Analog ergibt sich für den Erregerkreis 𝑢𝐸 = 𝑅𝐸 𝑖𝐸 + 𝐿𝐸 𝑑𝑖𝐸 𝑑𝑡 (Gl. 3.2) Der durch den Erregerkreis hervorgerufene verkettete Fluss 𝜓𝐸 ergibt sich zu 𝜓𝐸 = 𝐿𝐸 𝑖𝐸 (Gl. 3.3) SS 2012 Datum: 10-04-2012 Seite 8 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) mit 𝜓𝐸 = 𝑁𝐸 𝜙𝐸 und Gl. 3.4 folgt: 𝑢𝐸 = 𝑅𝐸 𝑖𝐸 + 𝑁𝐸 𝑑𝜙𝐸 𝑑𝑡 (Gl. 3.4) Mit der Windungszahl der Erregerwicklung 𝑁𝐸 . Für das Drehmoment einer Gleichstrommaschine gilt: 𝑚𝑀 = 𝑐𝑀 𝜙𝐸 𝑖𝐴 (Gl. 3.5) mit der Maschinenkonstanten 𝑐𝑀 . Für die induzierte Gegenspannung (die elektromotorische Kraft, EMK) gilt 𝑢𝑖𝐴 = 𝑐𝑚 𝜙𝐸 𝜔 (Gl. 3.6) mit der Winkelgeschwindigkeit 𝜔 . Die Winkelgeschwindigkeit 𝜔 hängt mit der Drehzahl in wie folgt zusammen: 𝑛= 𝜔 𝜔 60 s = 2𝜋 2𝜋 1 min (Gl. 3.7) Für die belastete Gleichstrommaschine ergibt sich die folgende dynamische Gleichung 𝑑𝜔 1 = (𝑚𝑀 − 𝑚𝐿 ) 𝑑𝑡 𝐽 (Gl. 3.8) mit dem Massenträgheitsmoment 𝐽 und dem Lastdrehmoment 𝑚𝐿 . SS 2012 Datum: 10-04-2012 Seite 9 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 3.2 Gleichstromnebenschlussmaschine Bei der Gleichstromnebenschlussmaschine sind Erregerwicklung und Ankerwicklung parallel geschaltet. Erregerspannung 𝑢𝐸 und Ankerspannung 𝑢𝐴 sind gleich. Abbildung 3.2: Elektrisches Ersatzschaltbild der Gleichstromnebenschlussmaschine Betrachtet man den stationären Betrieb, entfallen die Ableitungen nach der Zeit. Für die Gleichstromnebenschlussmaschine ergeben sich damit die folgenden Gleichungen: 𝑈𝐴 = 𝑅𝐴 𝐼𝐴 + 𝑈𝑖𝐴 (Gl. 3.9) 𝑈𝐸 = 𝑈𝐴 = 𝑅𝐸 𝐼𝐸 (Gl. 3.10) 𝑀𝑀 = 𝑐𝑀 𝜙𝐸 𝐼𝐴 (Gl. 3.11) 3.3 Gleichstromreihenschlussmaschine Gleichstromreihenschlussmaschinen sind durch eine Reihenschaltung von Ankerund Erregerwicklung gekennzeichnet: 𝑈 = 𝑈𝐴 + 𝑈𝐸 (Gl. 3.12) Beide Wicklungen werden vom gleichen Strom durchflossen: SS 2012 Datum: 10-04-2012 Seite 10 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 𝑖 = 𝑖𝐴 = 𝑖𝐸 (Gl. 3.13) Abbildung 3.3: Elektrisches Ersatzschaltbild der Gleichstromreihenschlussmaschine Durch den Widerstand 𝑅𝑃 kann ein Teil des Ankerstroms an der Erregerwicklung vorbei fließen. In diesem Fall gilt nicht 𝑖𝐴 = 𝑖𝐸 . Das Verhältnis von Erreger- zu Ankerstrom wird als Erregergrad bezeichnet. Für einen Erregergrad 1 ergibt sich für das Drehmoment 𝑀𝑀 = 𝑐𝑀 𝐿𝐸 2 𝐼 𝑁𝐸 𝐴 (Gl. 3.14) mit 𝜙𝐸 = 𝐿𝐸 𝐼𝐸 𝑁𝐸 (Gl. 3.15) SS 2012 Datum: 10-04-2012 Seite 11 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 4 Betriebsverhalten der Gleichstrommaschine 4.1 Anlaufverhalten der fremderregten Gleichstrommaschine und der Gleichstromnebenschlussmaschine Für den Ankerstrom einer fremderregten Gleichstrommaschine folgt aus Gl. 3.9 𝐼𝐴 = (𝑈𝐴 − 𝑈𝑖𝐴 ) 𝑅𝐴 (Gl. 4.1) Hierbei kann die Induktivität 𝐿𝐴 im Ankerkreis vernachlässigt werden. Aus Gl. 3.6 folgt, dass die induzierte Gegenspannung im Stillstand (𝜔 = 0 ) 0 ist. Der Ankerstrom wird nur durch den Ankerwiderstand begrenzt. Die Ankerwicklungen werden niederohmig ausgeführt, um die Stromwärmeverluste im Betrieb möglichst gering zu halten. Damit kann sich beim Einschalten ein sehr großer Ankerstrom ergeben. Um das zu vermeiden gibt es zwei Möglichkeiten: 1. Die Spannung 𝑈𝐴 wird schrittweise von 0 bis zum gewünschten Endwert erhöht. 2. Während des Anlaufs wird ein zusätzlicher Widerstand (Anlaufwidertand) in den Ankerkreis geschaltet. 4.2 Belastungsmaschine Zur Aufnahme von Belastungskennlinien ist es notwendig, den Motor mit veränderlichen Lastdrehmomenten zu belasten. In diesem Praktikum erfolgt die Belastung durch eine 0,3 kW Servobremse. SS 2012 Datum: 10-04-2012 Seite 12 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 5 Versuchsvorbereitung 1. Welche Möglichkeiten existieren, um eine fremderregte Gleichstrommaschine vom Stillstand bis zu einer gewünschten Drehzahl zu beschleunigen, ohne den Ankernennstrom zu überschreiten? Geben Sie die entsprechenden Schaltungen an. 2. Lösen Sie folgende Aufgabe: Ein Gleichstrom-Nebenschlussmotor mit 220 V Nennspannung habe einen Ankerwiderstand von 0, 2 Ω. Im Nennpunkt des Motors betrage der Ankerstrom 1 A . Nun werde bei still stehendem Rotor über den Motorklemmen Nennspannung angelegt. Wie groß ist der sich einstellende Ankerstrom des Motors (Anlaufstrom)? Drücken Sie den Anlaufstrom in Prozent des Nennstromes aus. Berechnen Sie den (Vor-) Widerstand, der in Reihe zum Ankerkreis geschaltet werden muss, um den Anlaufstrom auf 150 % des Nennstroms zu begrenzen. Gehen Sie von Gl. 4.1 aus. 3. Leiten Sie die Gleichungen für die Belastungskennlinien 𝑛 = 𝑓 (𝑀𝑀 ), 𝐼𝐴 = 𝑓 (𝑀𝑀 ) für den fremderregten Gleichstrommotor her. Zeichnen Sie die entsprechenden Kennlinien 𝑛 = 𝑓(𝑀𝑀 ), 𝐼𝐴 = 𝑓(𝑀𝑀 ) in qualitativer Form für a. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝜙𝐸 = 𝜙𝐸𝑁 b. 𝑈𝐴 = 0,5𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝜙𝐸 = 𝜙𝐸𝑁 c. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 2𝑅𝐴 , 𝜙𝐸 = 𝜙𝐸𝑁 d. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝜙𝐸 = 0,5𝜙𝐸𝑁 4. Leiten Sie die Gleichungen für die Belastungskennlinien 𝑛 = 𝑓 (𝑀𝑀 ), 𝐼𝐴 = 𝑓 (𝑀𝑀 ) für den Gleichstromreihenschlussmotor her. Zeichnen Sie die entsprechenden Kennlinien 𝑛 = 𝑓 (𝑀𝑀 ), 𝐼𝐴 = 𝑓 (𝑀𝑀 ) in qualitativer Form für, e. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝐼𝐸 = 𝐼𝐸𝑁 f. 𝑈𝐴 = 0,5𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝐼𝐸 = 𝐼𝜙𝐸𝑁 g. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 2𝑅𝐴 , 𝐼𝐸 = 𝐼𝐸𝑁 h. 𝑈𝐴 = 𝑈𝐴𝑁 , 𝑅 = 𝑅𝐴 , 𝐼𝐸 = 0,5𝐼𝐸𝑁 SS 2012 Datum: 10-04-2012 Seite 13 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 5. Wie kann bei der Gleichstromnebenschluss- und der Gleichstromreihenschlussmaschine das Erregerfeld geschwächt werden? Geben Sie die entsprechenden Schaltungen an. SS 2012 Datum: 10-04-2012 Seite 14 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 6 Versuchsdurchführung 6.1 Motorbetrieb der Gleichstromnebenschlussmaschine - Bauen Sie die Schaltung nach folgendem Schalt und Aufbauplan auf - Integrieren Sie einen Strom- und Spannungsmesser in den Ankerkreis - Schalten Sie auch die Bremse ein, der Motor wird dabei nicht belastet (HINWEIS: Die Einstellung des Gleichstromversorgungsgerätes kann nur bei angeschlossenem Motor Erfolgen!) Abbildung 6.1: Schaltplan Gleichstromnebenschlussmotor SS 2012 Datum: 10-04-2012 Seite 15 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.2: Aufbauplan Gleichstromnebenschlussmotor Inbetriebnahme des Nebenschlussmotors: Erforderliche Einstellungen: - Anlasser: Minimalwert (0 Ω) - Multimeter-Messmethode: Arithmetischer Mittelwert („Mean“) - Gleichstromversorgungsgerät: 220 V Versuchsdurchführung: - Nehmen Sie den Motor in Betrieb und beobachten ihn o Dreht der Motor mit Nenndrehzahl o Wie ist die Drehrichtung des Motors? o Wie verhält sich der Einschaltstrom im Gegensatz zum Nennstrom? o Wie Verhält sich der Strom mit Steigender Drehzahl? SS 2012 Datum: 10-04-2012 Seite 16 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Messen des Ankerstromes: Erforderliche Einstellungen: - Bremse: Mode „Torque Control“ Versuchsdurchführung: - Bremsen Sie den Motor bis zu seiner Nenndrehzahl ab - Messen Sie dabei den Ankerstrom (HINWEIS: Achten Sie darauf, den Motor nicht bis zum Stillstand abzubremsen!) - Wie hoch ist der Ankerstrom bezogen auf den Nennstrom? Aufnahme einer Belastungskennlinie: Erforderliche Einstellungen: - Anlasser: Maximalwert (47 Ω) Nach dem Starten des Motors ist der Anlasser wieder auf 0Ω einzustellen. Versuchsdurchführung: - Erhöhen Sie schrittweise die Belastung des Motors bis zum 1,5-fachen Nennstrom und vervollständigen Sie die Tabelle - Übertragen Sie die Tabell in Excell Und stellen die Verläufe von 𝑛, 𝐼 und 𝑈 in Abhängigkeit von 𝑀 graphisch dar SS 2012 Datum: 10-04-2012 Seite 17 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Tabelle 6.1: Messwerte Belastungskennlinie Gleichstromnebenschlussmotor 𝑀/Nm 0 𝑛/(1/min) 𝐼/A 𝑈/V 0,2 0,4 0,6 0,8 1 1,2 1,4 - Wie verhält sich der Strom mit steigendem Drehmoment? - Wie verhält sich die Ankerspannung mit steigendem Drehmoment? - Wie verhält sich die Drehzahl mit Steigendem Drehmoment? - Wie verhält sich die Drehzahl im Bereich des Nenndrehmomentes? 6.2 Drehzahlsteuerung der Gleichstromnebenschlußmaschine - Bauen Sie die Schaltung nach folgendem Schalt- und Aufbauplan auf - Integrieren Sie einen Strom und Spannungsmesser in den Ankerkreis - Integrieren Sie einen Strommesser in den Erregerkreis - Schalten Sie auch die Bremse ein, der Motor wird dabei nicht belastet (HINWEIS: Die Einstellung des Gleichstromversorgungsgerätes kann nur bei angeschlossenem Motor erfolgen!) SS 2012 Datum: 10-04-2012 Seite 18 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.3: Schaltplan Gleichstromnebenschlussmotor „Drehzahlsteuerung“ SS 2012 Datum: 10-04-2012 Seite 19 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.4: Aufbauplan Gleichstromnebenschlussmotor „Drehzahlsteuerung“ Aufnahme der Kennlinie „𝑰𝑨 “ und „𝒏“ in Abhängigkeit von „𝑼𝑨 “: Erforderliche Einstellungen: - Einstellbares Gleichstromversorgungsgerät (Ankerspannung): 220 V - Gleichstromversorgungsgerät (Erregerkreisspannung): 210 V - Bremse: Mode „Torque Control“ - Felsteller: Minimalwert (0 Ω) Versuchsdurchführung: - Verringern Sie mit der Einstellbaren Gleichstromversorgung die - Ankerspannung in 3 Stufen (220 V / 190 V / 160 V) Messen Sie dabei jeweils 𝐼𝐴 und 𝑛 und übertragen die gemessenen Werte in die Tabelle SS 2012 Datum: 10-04-2012 Seite 20 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) - Übertragen Sie die Tabell in Excell und stellen die Verläufe von 𝑛 und 𝐼𝐴 in Abhängigkeit von 𝑈𝐴 graphisch dar Tabelle 6.2 : Messwerte Kennlinie „𝐼𝐴 “ und „𝑛“ in Abhängigkeit von „𝑈𝐴 𝑈𝐴 /V 220 𝑛/(1/min) 𝐼𝐴 /A 190 160 Aufnahme der Kennlinie „𝒏“ in Abhängigkeit von „𝑴“ mit Hilfe der Software „Active Servo“ Erforderliche Einstellungen: - Bremse: „PC Mode“ - Feldsteller: Minimalwert (0 Ω) - - Einstellbares Gleichstromversorgungsgerät (Ankerkreisspannung): 220V / 190 V / 160 V Gleichstromversorgungsgerät (Erregerkreisspannung): 210 V Versuchsdurchführung: - Starten Sie die Software „Active Servo“ - Wählen Sie im Menü Einstellung -> Betriebsart -> Momentenregelung - Der Motor soll bis zu seinem Nenndrehmoment belastet werden - Beschriften Sie die Diagramme entsprechend - Es werden nacheinander insgesamt drei Belastungskennlinien für die drei vorgegebenen Ankerkreisspannungen aufgenommen - Exportieren Sie nach erfolgter Messung das erstellte Diagramm mit den drei Kennlinien - Berechnen Sie das Nennmoment der Motors nach folgender Formel: 𝑀𝑁 = 𝑃2 𝜔 SS 2012 Datum: 10-04-2012 Seite 21 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Aufnahme der Kennlinie „𝑰𝑭 “ und „𝒏“ in Abhängigkeit von 𝑹𝑭 Erforderliche Einstellungen: - Bremse: Mode „Torque Control“ - Feldsteller: Minimalwert (0 Ω) - Schalten Sie die Gleichstromversorgung ein - Geleichstromversorgungsgerät: (Anker- & Erregerkreis) 220 V / 210 V Variieren Sie der Wert 𝑅𝐹 des Feldstellers in 3 Stufen, um die in der Tabelle vorgegebene Drehzahl zu erreichen - Messen Sie dabei jeweils 𝐼𝐹 und übertragen Sie die gemessenen Werte in die Tabelle - Übertragen Sie die Tabell in Excell und stellen den Verlauf von 𝑛 in Abhängigkeit von 𝐼𝑓 graphisch dar Tabelle 6.3: Messwerte Kennlinie „𝐼𝐹 “ und „𝑛“ in Abhängigkeit von 𝑅𝐹 𝑛/(1/min) 2300 𝐼𝐹 /mA 2600 3000 - Wie verhält sich die Drehzahl bei Verringerung der Ankerspannung? - Wie verhält sich die Drehzahl bei Verringerung des Erregerstromes? 6.3 Die Belastungskennlinie der Gleichstromnebenschlussmaschine - Bauen Sie die Schaltung nach folgendem Schalt- und Aufbauplan auf - Integrieren Sie einen Strom- und Spannungsmesser in den Anker/Erregerkreis - Schalten Sie auch die Bremse ein, der Motor wird dabei nicht belastet (HINWEIS: Die Einstellung des Gleichstromversorgungsgerätes kann nur bei angeschlossenem Motor erfolgen!) SS 2012 Datum: 10-04-2012 Seite 22 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.5: Schaltplan Gleichstromnebenschlussmotor „Belastungskennlinie“ SS 2012 Datum: 10-04-2012 Seite 23 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.6: Aufbauplan Gleichstromnebenschlussmotor „Belastungskennlinie“ Aufnahme der Belastungskennlinie des Motors mit Hilfe der Software „Active Servo“ Erforderliche Einstellungen: - Bremses: „PC Mode“ - Gleichstromversorgungsgerät: (Anker- & Erregerkreis) 220 V Versuchsdurchführung: - Starten Sie die Software „ActiveServo“ - Der Motor soll bis zu seinem Nenndrehmoment belastet werden - Beschriften Sie das Diagramm entsprechend SS 2012 Datum: 10-04-2012 Seite 24 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) - Folgende Parameter sollen aufgenommen werden: Der Wirkungsgrad 𝜂(𝑀) (𝜂=>“Eta“), der Ankerstrom 𝐼𝐴 , die abgegebene Leistung 𝑃2 und die Drehzahl - 𝑛(𝑀) Bevor Sie die Messung starten, müssen Sie noch die Frage nach dem Nenndrehmoment beantworten, welches Sie in dem Versuch „Drehzahlsteuerung“ ermittelt haben - Exportieren Sie das erstellte Diagramm nach erfolgter Messung - Ermitteln Sie aus dem Diagramm den höchsten Wirkungsgrad Das Nenndrehmoment beträgt: 𝑀𝑁 = _______Nm 6.4 Betrieb der Gleichstromreihenschlussmaschine - Bauen Sie die Shaltung nach folgendem Schalt- und Aufbauplan auf - Integrieren Sie einen Strom- und Spannungsmesser in den Motorkreis - Schalten Sie auch die Bremse ein, der Motor wird dabei nicht belastet (HINWEIS: Die Einstellung des Gleichstromversorgungsgerätes kann nur bei angeschlossenem Motor erfolgen!) SS 2012 Datum: 10-04-2012 Seite 25 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.7: Schaltplan SS 2012 Datum: 10-04-2012 Seite 26 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) Abbildung 6.8: Schaltskizze Ermittlung des (Nenn-) Wirkungsgrades Erforderliche Einstellungen: - Bremse: Mode „Torque Control“ (HINWEIS: Die Bremse sollte in jedem Falle aktiv sein!) - Anlasser: Minimalwert (0 Ω) - MultimeterMessmethode: Arithmetischesr Mittelwert („Mean“) - Gleichstromversorgungsgerät: 220 V Versuchsdruchführung: - Bremsen Sie den Motor bis zu seinem Nenndrehmoment ab - Messen Sie dabei den Motorstrom SS 2012 Datum: 10-04-2012 Seite 27 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) - Berechnen Sie mit der vorgegebenen Formel aus den Nenndaten und den gemessenen Größen den Wirkungsgrad des Motors Achten Sie darauf den Motor nicht ohne Belastung zu betreiben, da dieser sonst „durchgehen“ könnte! Der Wirkungsgrad ist definiert als : 𝜂= 𝑃2 𝑃1 (Gl. 6.1) 𝑃2 = 𝑀𝑛 𝜔 (Gl. 6.2) 𝑃1 = 𝑈𝑀 𝐼𝑀 (Gl. 6.3) 𝜔 = 2𝜋𝑛 - (Gl. 6.4) Der Wirkungsgrad „𝜂“ des Reihenschlussmotors beträgt ca.: Aufnahme einer Belastungskennlinie (mit Anlasser) Erforderliche Einstellungen: - Bremse: Mode „Torque Control“ (HINWEIS: Die Bremse sollte in jedem Fall aktiv sein!) - Anlasser: Minimalwert (0 Ω) Gleichstromversorgungsgerät: 220 V Versuchsdurchführung: - Bremsen Sie den Motor bis zu seinem 0,5-fachen Nenndrehmoment ab - Verstellen Sie nun in 5 Stufen den Anlasser von 0 bis 100% seines - Maximalwertes (~47 Ω) Messen Sie dabei den Motorstrom und –spannung Übertragen Sie die Messwerte in die Tabelle SS 2012 Datum: 10-04-2012 Seite 28 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) - Übertragen Sie die Tabell in Excell und stellen die Verläufe von 𝑛 und 𝐼 in Abhängigkeit von 𝑈 graphisch dar Tabelle 6.4: Tabelle 𝑈/V 𝑛/(1/min) 𝐼/A 6.5 Die Belastungskennlinie der Gleichstromreihenschlussmaschine - Bauen Sie die Schaltung nach folgendem Schalt- und Aufbauplan auf - Integrieren Sie einen Strom- und Spannungsmesser in den Motorkreis - Schalten Sie auch die Bremse ein, der Motor wird dabei vorerst nicht belastet (HINWEIS: Die Einstellung des Gleichstromversorgungsgerätes kann nur bei angeschlossenem Motor erfolgen!) Aufnahme der Belastungskennlinie des Motors mit Hilfe der Software „ActiveServo“ Erforderliche Einstellungen: - Bremse: „PC Mode“ o ActiveServo: Einstellung -> Betriebsart -> Drehzahlregelung - Gleichstromversorgungsgerät: (Motorkreis) 220 V Versuchsdurchführung: - Starten Sie die Software „ActiveServo“ - Starten Sie unbedingt die Bremse mit 3000 min−1 auf 1600 min−1 abgebremst werden - Beschriften Sie die Diagramme entsprechend SS 2012 Datum: 10-04-2012 Seite 29 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) - Im ersten Diagramm sollen folgende Parameter dargestellt werden: Der - Motorstrom 𝐼(𝑀) , die Motorspannung 𝑈(𝑀) und das Drehmoment 𝑀(𝑀) Im zweiten Diagramm sollen folgende Parameter dargestellt werden: Die aufgenommene elektrische und abgegebene mechanische Leistung (𝑃1(𝑀) , - 𝑃2(𝑀) ), sowie der sich daraus ergebene Wirkungsgrad 𝜂(𝑀) (𝜂 => „Eta“) - Ermitteln Sie aus dem zweiten Diagramm den höchsten Wirkungsgrad Exportieren Sie das erstellte Diagramm nach erfolgter Messung Der maximale Wirkungsgrad „𝜂“ des Reihenschlussmotors beträgt: 𝜂 = ca. _______% - Wie verhalten sich Erregerfeld und Ankerstrom bei kleinen Belastungen? - Wie verhält sich der Ankerstrom bei steigender Belastung - Ist der Wirkungsgrad konstant? - Wie verhält sich die Drehzahl zum Drehmoment? - Wie verhält sich die Drehzahl bei kleinen Belastungen? - Wesghalb sollte der Reihenschlussmotor niemals ohne Last betrieben werden? SS 2012 Datum: 10-04-2012 Seite 30 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 7 Literatur [1] Müller, G. - Elektrische Maschinen - Grundlagen, Aufbau und Wirkungsweise, 5. Auflage, Verlag Technik Berlin 1982 [2] Riefenstahl, U. – Elektrische Antriebstechnik, Verlag B.G. Teubner Stuttgart 2000 SS 2012 Datum: 10-04-2012 Seite 31 Von 32 Fachgebiet Leistungselektronik und Elektrische Antriebstechnik Prof. Dr.-Ing. Joachim Böcker LABORPRAKTIKUM – Versuch Gleichstrommaschine (GM) 8 Daten der Gleichstrom-Mehrfunktionsmaschine 0,3 kW - Nennspannung: 220 V Nennstrom: 1 A Erregerspannung: 220 V Erregerstrom: 100 mA Nenndrehzahl: 2000 min-1 Nennleistung: 0,2 kW Abmessungen: 340 x 210 x 210 mm (B x H x T) Gewicht: 10 kg SS 2012 Datum: 10-04-2012 Seite 32 Von 32