6 Numerische Integration - TU Bergakademie Freiberg
Werbung

251
Numerik I
6
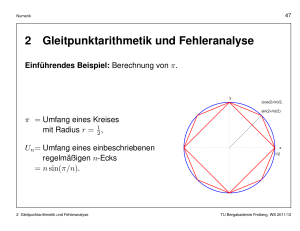
Numerische Integration
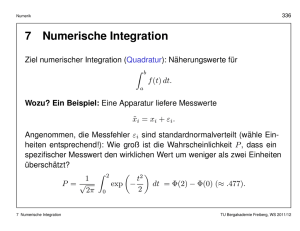
Ziel numerischer Integration (Quadratur): Näherungswerte für
Z b
f (t) dt.
a
Wozu? Eine Apparatur liefere Messwerte x
ei = xi + εi . Angenommen, die
Messfehler εi sind standardnormalverteilt (wähle Einheiten entsprechend!):
Wie groß ist die Wahrscheinlichkeit P , dass ein Messwert den wirklichen
Wert um weniger als zwei Einheiten überschätzt?
2
Z 2
t
1
√
exp −
dt = Φ(2) − Φ(0) (≈ .477).
P =
2
2π 0
6 Numerische Integration
TU Bergakademie Freiberg, WS 2011/12
252
Numerik I
1
1
0.8
0.8
0.6
0.6
exp(−.5*t2)/(2 π)1/2
0.4
0.4
0.2
0.2
0
−4
−2
0
2
4
0
−5
Φ(x)
0
5
Aber: Es gibt keine geschlossene Formel für den Wert von
2
Z x
t
1
Φ(x) = √
exp −
dt
2
2π −∞
(und vieler anderer Integrale). Selbst wenn geschlossenene Formeln bekannt sind, ist eine numerische Approximation oft ökonomischer.
6 Numerische Integration
TU Bergakademie Freiberg, WS 2011/12
253
Numerik I
6.1
Newton-Cotes-Formeln
Gesucht: Wert von I =
Rb
a
f (x) dx.
Idee der interpolatorischen Quadraturformeln:
Wähle n + 1 Knoten a ≤ x0 < x1 < · · · < xn−1 < xn ≤ b, bestimme das
zugehörige Interpolationspolynom pn ∈ Pn für f
pn (x) =
n
X
f (xj )`j (x)
mit
j=0
n
Y
x − xi
`j (x) =
xj − xi
i=0
i6=j
(Lagrange-Form) und betrachte
Z b
Z b
n
n
X
X
γj f (xj )
pn (x) dx =
f (xj )
`j (x) dx =
a
j=0
} j=0
| a {z
=:γj
als Näherung für I.
γj bzw. xj heißen Gewichte bzw. Knoten der Integrationsformel.
6.1 Newton-Cotes-Formeln
TU Bergakademie Freiberg, WS 2011/12
254
Numerik I
Die Newton-Cotes-Formeln
I≈
n
X
(n)
γj f (xj )
j=0
sind interpolatorische Quadraturformeln mit äquidistanten Knoten
xj = a + jh
(j = 0, 1, . . . , n),
wobei h = (b − a)/n.
Bestimmung der Gewichte. Mit der Substitution x = a + ht, t ∈ [0, n]:
Z bY
Z nY
n
n
x
−
x
t−i
i
(n)
(n)
γj =
dx = h
dt =: hαj
a i=0 xj − xi
0 i=0 j − i
i6=j
(n)
(αj
i6=j
sind unabhängig von f , a und b). Für jedes n gelten
(n)
(n)
α0 + α1 + · · · + αn(n) = n
(n)
und αj
6.1 Newton-Cotes-Formeln
(n)
= αn−j
(j = 0, 1, . . . , n).
TU Bergakademie Freiberg, WS 2011/12
255
Numerik I
Tabelle der Newton-Cotes-Gewichte:
n
X
(n)
I ≈ b−a
α
j f (a + jh)
n
j=0
n
Name
1
Trapezregel
2
Simpson-Regel
3
3/8-Regel
4
Milne-Regel
5
6
Weddle-Regel
(n)
αj
1
2
1
3
3
8
14
45
95
288
41
140
1
2
4
3
9
8
64
45
375
288
216
140
(j = 0, 1, . . . , n)
1
3
9
8
24
45
250
288
27
140
3
8
64
45
250
288
272
140
14
45
375
288
27
140
95
288
216
140
41
140
Für größere n treten negative Gewichte auf, die Newton-Cotes-Formeln
werden numerisch unbrauchbar.
6.1 Newton-Cotes-Formeln
TU Bergakademie Freiberg, WS 2011/12
256
Numerik I
Fehler der Newton-Cotes-Formeln:
Z b
Z
n
X
(n)
En (f ) =
f (x) dx − h
αj f (a + jh) =
a
j=0
a
b
wn+1 (x) (n+1)
f
(ζ(x)) dx,
(n + 1)!
wenn f ∈ C (n+1) [a, b] (vgl. Satz 5.4).
Insbesondere werden Polynome vom Grad ≤ n durch die
n-te Newton-Cotes-Formel exakt integriert.
Man kann zeigen: Ist n gerade, so werden sogar Polynome vom Grad n + 1
exakt integriert.
(
Exaktheitsgrad der
n,
falls n ungerade,
=
n-ten Newton-Cotes-Formel
n + 1,
falls n gerade.
6.1 Newton-Cotes-Formeln
TU Bergakademie Freiberg, WS 2011/12
257
Numerik I
Fehlerschranken
Z b
n
X
(n)
|En (f )| = f (x) dx − h
αj f (a + jh) ≤ Sn (f )
a
j=0
n
Name
Sn (f )
1
Trapezregel
h3
2
Simpson-Regel
h5
3
3/8-Regel
h5
4
Milne-Regel
h7
h7
5
6
Weddle-Regel
h9
1
12 M2
1
90 M4
3
80 M4
8
945 M6
275
12096 M6
9
1400 M8
mit Mk := maxa≤x≤b |f (k) (x)| und h = (b − a)/n.
6.1 Newton-Cotes-Formeln
TU Bergakademie Freiberg, WS 2011/12
258
Numerik I
6.2
Zusammengesetzte Integrationsformeln
Idee: Unterteile das Integrationsintervall [a, b] in N Teilintervalle der Länge
H := (b − a)/N und wende auf jedes Teilintervall
[a + jH, a + (j + 1)H]
(j = 0, 1, 2, . . . , N − 1),
R a+(j+1)H
d.h. zur näherungsweisen Berechnung von a+jH
f (x) dx,
die n-te Newton-Cotes-Formel (mit Schrittweite h = H/n) an:
Z
b
f (x) dx =
a
=
N
−1 Z a+(j+1)H
X
j=0
a+jH
N
−1
X
n
X
j=0
6.2 Zusammengesetzte Integrationsformeln
h
f (x) dx ≈
N
−1
X
h
j=0
n
X
(n)
αk f (a + jH + kh)
k=0
(n)
αk f (a + (jn + k)h).
k=0
TU Bergakademie Freiberg, WS 2011/12
259
Numerik I
Beispiel für n = 1: zusammengesetzte Trapezregel.
Hier H = (b − a)/N = h,
also N + 1 Stützstellen: xj = a + jh, j = 0, 1, . . . , N :
Z b
N
−1
X
h
f (x0 ) + 2
f (xj ) + f (xN ) =: T (h).
f (x) dx ≈
2
a
j=1
Fehler:
Z
b−a
b
f (x)dx − T (h) ≤
M2 h2
a
12
mit M2 = maxa≤x≤b |f 00 (x)|.
Aufwand zur Berechnung von T (h): N + 1 Funktionsauswertungen.
6.2 Zusammengesetzte Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
260
Numerik I
Beispiel für n = 2: zusammengesetzte Simpson-Regel.
Hier H = (b − a)/N = 2h, d.h. h = (b − a)/(2N ),
also 2N + 1 Stützstellen: xj = a + jh, j = 0, 1, . . . , 2N :
Z b
N
−1
N
−1
X
X
h
f (x)dx ≈
f (x0 ) + 4
f (x2j+1 ) + 2
f (x2j ) + f (x2N ) =: S(h).
3
a
j=0
j=1
Fehler:
Z
b−a
b
b−a
4
M
h
=
M4 H 4
f
(x)
dx
−
S(h)
≤
4
a
180
2880
mit M4 = maxa≤x≤b |f (4) (x)|.
Aufwand zur Berechnung von S(h): 2N + 1 Funktionsauswertungen.
6.2 Zusammengesetzte Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
261
Numerik I
6.3
Adaptive Integrationsformeln
Rb
Wendet man eine zusammengesetzte Quadraturformel auf I = a f (x) dx
an, so ist es nicht immer sinnvoll, das Integrationsintervall [a, b] in gleichlange Teilintervalle der Länge H zu unterteilen: Der Quadraturfehler hängt
von einer (höheren) Ableitung von f ab und die kann in [a, b] stark variieren.
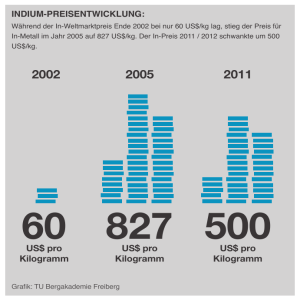
Für beispielsweise
f (x) =
x
,
2
x −1
x ∈ [1.001, 10],
bewegt sich die vierte Ableitung (die den Fehler bei der zusammengesetzten Simpson-Regel kontrolliert) zwischen 1.2 · 108 (am linken Rand) und
2.7·10−4 (am rechten Rand). Man erwartet, dass man am rechten Ende des
Intervalls mit wesentlich weniger Stützstellen (d.h. wesentlich geringerem
Rechenaufwand) eine akzeptable Näherung des Integrals bestimmen kann
als in der Umgebung von 1.001.
6.3 Adaptive Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
262
Numerik I
Bestimme
Z
I=
10
1.001
10
x
1
dx = log(x + 1) + log(x − 1) 1.001 = 5.4046 . . .
2
x −1
2
Zusammengesetzte Simpson-Regel
N
h
# f (x)
|I − S(h)|
103
4.5 · 10−3
2 · 103 + 1
2.2 · 10−1
104
4.5 · 10−4
2 · 104 + 1
4.9 · 10−4
105
4.5 · 10−5
2 · 105 + 1
6.8 · 10−8
Adaptive Simpson-Regel
6.3 Adaptive Integrationsformeln
# f (x)
|I − S(h)|
61
1.4 · 10−4
641
1.3 · 10−10
TU Bergakademie Freiberg, WS 2011/12
263
Numerik I
Gegeben ist eine Quadraturformel, z.B. die Simpson-Regel S(H), mit einer
Fehlerabschätzung, hier:
I − S(H) = c H 4 + O(H 5 ).
Gesucht ist eine Näherung für I, die sich zusammensetzt aus Näherungen
R xj+1
(j)
I0 für xj f (x) dx über Teilintervallen unterschiedlicher Länge Hj =
xj+1 − xj , so dass
Z b
N
X
(j) I −
|f (x)| dx
I
0 ≤ ε := tol ·
a
j=0
gilt. Weder die Anzahl (N + 1) der Teilintervalle noch die Unterteilungspunkte xj+1 := xj + Hj (j = 0, . . . , N − 1) sind a priori bekannt.
6.3 Adaptive Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
264
Numerik I
Wir wollen den Fehler gleichmäßig auf die Teilintervalle verteilen“, d.h. Hj
”
soll so gewählt werden, dass
Z
xj +Hj
Hj
(j) ε
f (x) dx − I0 ≤
xj
b−a
erfüllt ist.
Wichtige Beobachtung: Aus
I − S(H) = c H 4 + O(H 5 )
und
I − S(H/2) = c (H/2)4 + O(H 5 )
folgt
S(H/2) − S(H) = c (1 − 2−4 ) H 4 + O(H 5 )
also, falls H genügend klein“ ist,
”
I − S(H) ≈
6.3 Adaptive Integrationsformeln
S(H/2) − S(H)
.
−4
1−2
(∗)
TU Bergakademie Freiberg, WS 2011/12
265
Numerik I
Strategie zur Schrittweitenwahl (Schrittweitensteuerung):
Angenommen H0 , . . . , Hj−1 (dh. x0 , . . . xj ) sind bereits bestimmt. Außere j gegeben.
dem ist eine Vorschlagsschrittweite H
e j . Bestimme mit I (j) = S(Hj ) eine Näherung für
1. Setze Hj = H
0
R xj +Hj
f (x) dx.
xj
2. Bestimme mit
(j)
I1
= S(Hj /2) eine bessere“ Näherung für
”
R xj +Hj
xj
f (x) dx.
3. Überprüfe, ob
(j)
(j)
|I1 − I0 | ≤ (1 − 2−4 )
Hj
ε
b−a
erfüllt ist (vgl. (∗)).
(j)
• Falls ja: Akzeptiere I1 als Näherung.
(j)
(j)
• Falls nein: Setze Hj = Hj /2, I0 = I1 und gehe zu 2.
6.3 Adaptive Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
266
Numerik I
4. Überprüfe, ob
(j)
(j)
|I1 − I0 | ≤ (2.5)−4 (1 − 2−4 )
Hj
ε
b−a
erfüllt ist (2.5 = Sicherheitsfaktor).
e j+1 = 2Hj .
• Falls ja: Neue Vorschlagsschrittweite: H
e j+1 = Hj .
• Falls nein: Neue Vorschlagsschrittweite: H
Praxis: Unter- und Oberschranken für Hj (zu kleine Schrittweiten führen zu
verstärktem Rundungsfehlereinfluss, zu große Schrittweiten können dazu
führen, dass Bereiche, in denen f stark variiert, übersprungen werden).
6.3 Adaptive Integrationsformeln
TU Bergakademie Freiberg, WS 2011/12
267
Numerik I
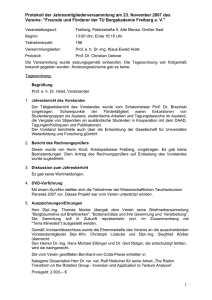
Beispiel.
f (x) =
1
1
+
− 6,
(x − .3)2 + .01
(x − .9)2 + .04
a = 0, b = 1.
Integral = 29.8583
100
90
80
70
60
50
40
30
20
10
0
0
6.3 Adaptive Integrationsformeln
108 Funktionsauswertungen
0.2
0.4
0.6
0.8
1
TU Bergakademie Freiberg, WS 2011/12
268
Numerik I
6.4
Gauß-Quadratur
Prinzip: Gauß-Formeln sind (wie die Newton-Cotes-Formeln) interpolatorische
Quadraturformeln
Z b
n
X
f (x)w(x) dx =
ωk f (xk ) + Rn (f ).
(6.1)
a
k=0
Rn (f ) bezeichnet den Quadraturfehler.
Man erlaubt hier sog. Gewichtsfunktionen w(x), welche gewisse Bedingungen (z.B.
w(x) ≥ 0 für alle x ∈ (a, b)) müssen. Gebräuchliche Gewichtsfunktionen sind:
6.4 Gauß-Quadratur
Name
[a, b]
w(x)
[−1, 1]
1
[−1, 1]
(1 − x2 )−1/2
[0, ∞]
exp(−x)
Gauß-Laguerre
[−∞, ∞]
exp(−x2 )
Gauß-Hermite
Gauß-Legendre
Gauß-Tschebyscheff
TU Bergakademie Freiberg, WS 2011/12
269
Numerik I
Im Gegensatz zu den Newton-Cotes-Formeln wählt man die Knoten xk
nicht äquidistant, sondern bestimmt Knoten xk und Gewichte ωk so, dass
sich ein möglichst hoher Exaktheitsgrad ergibt.
Heuristik:
Z
a
b
xj w(x) dx =
n
X
ωk xjk
k=0
ist für jedes j = 0, 1, . . . eine nichtlineare Gleichung mit 2n + 2 freien
Parametern
ωk , xk ,
k = 0, . . . , n.
Es scheint möglich, diese Gleichung für j = 0, . . . , 2n + 1 zu erfüllen
(Exaktheitsgrad 2n + 1).
6.4 Gauß-Quadratur
TU Bergakademie Freiberg, WS 2011/12
270
Numerik I
Die Gauß-Quadratur ist eng mit der Theorie der Orthogonalpolynome verknüpft:
Definiere (für Polynome p und q) das Innenprodukt
Z b
(p, q) :=
p(x)q(x)w(x) dx.
a
Dann gibt es für j = 0, 1, . . . eindeutig bestimmte Polynome (sog. Orthogonalpolynome) pj (x) = xj + πj,j−1 xj−1 + . . . + πj,1 x + πj,0 mit
(pj , pk ) = 0
für alle j 6= k.
Es gilt die dreistufige Rekursionsformel p−1 (x) = 0, p0 (x) = 1,
pj+1 (x) = (x − δj+1 )pj (x) − γj+1 pj−1 (x)
für j = 0, 1, . . . ,
wobei δj+1 = (xpj , pj )/(pj , pj ) und γj+1 = (pj , pj )/(pj−1 , pj−1 ).
6.4 Gauß-Quadratur
TU Bergakademie Freiberg, WS 2011/12
271
Numerik I
Es bezeichne P den Raum aller Polynome (beliebigen Grades) in einer
Variablen.
Satz 6.1 (Jacobi,1826) Sei m ∈ N0 . Die Quadraturformel (6.1) besitzt
genau dann Exaktheitsgrad d = n + m, wenn folgende beide Bedingungen
erfüllt sind:
(a) (6.1) ist interpolatorisch.
Qn
(b) Das Knotenpolynom ωn+1 (x) = j=0 (x − ξj ) ist orthogonal zu Pm−1
bezüglich des Innenproduktes
Z b
(p, q) =
p(x)q(x) w(x)dx, p, q ∈ P.
(6.2)
a
Bemerkung 6.2 Bedingung (b) ist maximal für m = n+1 erfüllbar (warum?),
was auf den maximalen Exaktheitsgrad d = 2n + 1 führt.
6.4 Gauß-Quadratur
TU Bergakademie Freiberg, WS 2011/12
272
Numerik I
(n)
Die Nullstellen tj
von pn+1 sind alle reell und einfach, genauer:
(n)
a < t0
(n)
< t1 · · · < t(n)
n < b.
Sie sind die Knoten xk (0 ≤ k ≤ n) der Gauß-Quadraturformel.
Die Gewichte ωk wählen wir als Lösung von
p0 (x0 ) p0 (x1 ) . . . p0 (xn )
ω0
(p0 , 1) =
p1 (x0 ) p1 (x1 ) . . . p1 (xn ) ω1
0
. =
..
..
..
..
..
.
.
.
.
.
.
.
pn (x0 ) pn (x1 ) . . . pn (xn )
ωn
0
Rb
a
w(x)dx
.
Man kann zeigen, dass dieses System eindeutig lösbar ist und dass die
Lösungen ωk alle positiv sind.
Die Knoten und Gewichte können noch effizienter durch Lösung einer
verwandten Eigenwertaufgabe berechnet werden.
6.4 Gauß-Quadratur
TU Bergakademie Freiberg, WS 2011/12
273
Numerik I
Mit dieser Wahl der Knoten und Gewichte gilt:
Z
b
p(x)w(x) dx =
a
n
X
ωk p(xk )
k=0
für alle Polynome p vom Grad ≤ 2n + 1.
Beispiel: Für die Gewichtsfunktion w(x) = (1 − x2 )−1/2 erhält man
2k + 1
Knoten: xk = cos
π , k = 0, 1, . . . , n,
2(n + 1)
Gewichte: ωk = π/(n + 1), k = 0, 1, . . . , n.
(Dass die Gewichte unabhängig von k sind, trifft auf andere Gauß-Formeln nicht
zu!) Gauß-Tschebyscheff-Quadraturformel:
Z 1
n
X
2k + 1
π
f cos
π
+ Rn (f )
f (x)(1 − x2 )−1/2 dx =
n
+
1
2(n
+
1)
−1
k=0
mit Rn (f ) =
6.4 Gauß-Quadratur
f (2n+2) (ξ)
(pn , pn )
(2n+2)!
falls f ∈ C (2n+2) [a, b].
TU Bergakademie Freiberg, WS 2011/12