Klick - home.hs
Werbung

Prof. Dr. R. Kessler, HS-Karlsruhe, C:\ro\Si05\kuellmar\Tilgerkunde_2n.doc, S. 1/5
http://www.home.hs-karlsruhe.de/~kero0001/
Tilgerkunde
F
D
m
r
x
DT
1
rT
mT
xT
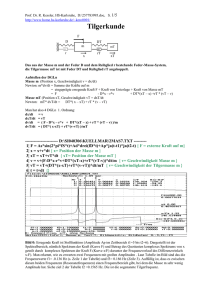
Das aus der Masse m und der Feder D und dem Reibglied r bestehende Feder-Masse-System,
die Tilgermasse mT ist mit Feder DT und Reibglied rT angekoppelt.
Aufstellen der DGLn
Masse m (Position x, Geschwindigkeit v = dx/dt)
Newton: m*dv/dt = Summe der Kräfte auf m
= eingeprägte erregende Kraft F + Kraft von Unterlage + Kraft von Masse mT
= F
- D*x – r*v
+ DT*(xT – x) +rT * (vT – v)
Masse mT (Position xT, Geschwindigkeit vT = dxT/dt
Newton: mT* dvT/dt =
DT*( x – xT) + rT * (v – vT)
Man hat also 4 DGLn 1. Ordnung:
dx/dt
=v
dxT/dt = vT
dv/dt = ( F - D*x – r*v + DT*(xT – x) + rT * (vT – v) )/m
dvT/dt = ( DT*( x-xT) + rT*(v-vT) )/mT
----------------------- D:\SI040306\KUELLMAR\2MAS7.TXT --------1¦ F = As*sin(2*pi*fS*t)+Ad*drei(fD*t)+Ap*ja(t-t1)*ja(t2-t) { F = externe Kraft auf m}
2¦ x = x+v*dt { x= Position der Masse m }
3¦ xT = xT+vT*dt { xT= Position der Masse mT }
4¦ v = v+(F-D*x-r*v+DT*(xT-x)+rT*(vT-v))*dt/m { v= Geschwindigkeit Masse m }
5¦ vT = vT+(DT*(x-xT)+rT*(v-vT))*dt/mT { v= Geschwindigkeit der Tilgermasse m }
6¦ t = t+dt {}
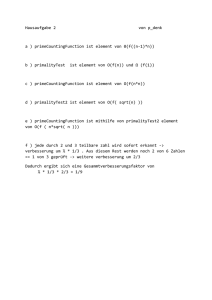
Bild 0: Erregende Kraft ist Stoßfunktion (Amplitude Ap im Zeitbereich t1=5 bis t2=6). Dargestellt ist der
Spektralbereich, nämlich Spektrum der Kraft (Kurve F) und Betrag des Quotienten komplexes Spektrums von x
geteilt durch komplexes Spektrum der Kraft F.(Kurve x/F) darunter der Frequenzverlauf des Differenzwinkels
x-F). Man erkennt, wie zu erwarten zwei Frequenzen mit großen Amplituden . Laut Tabelle im Bild sind das die
Frequenzwerte f1= .0.136 Hz (s. Zeile 1 der Tabelle) und f3= 0.186 Hz (Zeile 3). Auffällig ist, dass es zwischen
diesen beiden Frequenzen (Resonanzfrequenzen) einen Frequenzbereich gibt, bei dem die Masse m sehr wenig
Amplitude hat. Siehe ziel 2 der Tabelle f2 =0.1565 Hz. Die ist die sogenannte Tilgerfrequenz.
Prof. Dr. R. Kessler, HS-Karlsruhe, C:\ro\Si05\kuellmar\Tilgerkunde_2n.doc, S. 2/5
Bild 1: Ähnliche Figur wie Bild 0, aber hier ist das Spektrum der Position xT der Tilgermasse mT dargestellt.
Auch hier sieht man die beiden Resonanzfrequenzen mit der großen Amplitude. Auffällig ist, dass bei der für die
Masse m gefundenen Tilgerfrequenz (f2) die Amplitude der Tilgermasse mT keineswegs Null ist, sondern einen
endliche Wert hat (laut Zeile 2 xT/F =14.147, während x/F = 1.928 war (s. Bild 0).
Aus dem Spektrum ergibt sich also die Behauptung, dass die Masse m bei der Tilgerfrequenz sehr kleine
Amplitude hat, während mT große Amplitude hat. Diese Behauptung wird im Folgenden untersucht.
Bild 2. Sinuskraft mit Frequenz fS= 0.158, also mit der oben gefundenen Tilgerfrequenz. Man beachte den Text
im Bild
Prof. Dr. R. Kessler, HS-Karlsruhe, C:\ro\Si05\kuellmar\Tilgerkunde_2n.doc, S. 3/5
Bild 3. Die gleiche Sinuskraft wie in Bild 2, aber ohne angeschlossene Tilgermasse (dT=0, rT=0). S. Text im
Bild.
„Analytische“ Berechnung der „optimalen“ Tilgerfrequenz
Aus obigem Bild 2 geht hervor, dass die Wirkung des Tilgers so ist, dass die externe Sinuskraft zwar direkt auf
die Masse m wirkt, aber bei der „richtigen“ Abstimmung des Tilgers kann man erreichen, dass die Masse m
„sehr wenig“ Amplitude hat, die Tilgermasse mT dagegen „sehr viel“ Amplitude hat. Etwas enttäuschend ist,
dass die Amplitude x nicht völlig auf Null geht, s. Bild 2 .
Vermutlich war bei Bild 2 die Erregerfrequenz fS nicht „völlig richtig“ gewählt worden. Drum hier
„analytische“ Berechnung der richtigen Sinusfrequenz: Simple Idee: Der Tilger wird so abgestimmt, dass
seine „Eigenfrequenz“ identisch ist mit der Sinusfrequenz fS des Sinuserregers.
„Bekanntlich“ ist die Schwingungsdauer T eines (reibungslosen) Feder-Masse-Systems (Masse m, Feder D)
T =2*pi* sqrt(m/D), hier also T= 2*pi* sqrt(mT/DT)
Also Formel für die (in dieser Simulation) zu wählenden Erregerfrequenz fT= 1/( 2*pi*sqrt(mT/DT) ) .
Im nachfolgenden Tephysprogramm 2mas9.txt ist als Zeile 6 genau diese Formel hinzugefügt worden. Beim
Laufenlassen des Programms kann man dann am Bildschirm den Zahlenwert fT ablesen und per Hand als
Parameter für fS eintippen. Auf diese Weise entstand das nachfolgende Bild 5. Es bestätigt die obige
Vermutung: Jetzt geht die Amplitude der Auslenkung x gegen Null, im Gegensatz zu Bild 2.
In der „Praxis“ liegt die Problematik natürlich anders herum: Die Sinusfrequenz fS ist durch den
Unwuchterreger vorgegeben. Also berechnet man die richtige Federkonstante DT durch Umstellen obiger
Formel zu DT= (2*pi*fS)* (2pi*fS) * mT. Im „echten praktischen“ Fall wird man den Abgleich des Tilgers
experimentell vornehmen: Man misst „irgendwie“ sehr genau die Frequenz fS des Unwuchterregers und baut
sich seinen Tilger mit einer festen Einspannung auf (schwerer Schraubstock), stößt den Tilger an und misst
„irgendwie“ die Frequenz fT des Tilgers. Dann ändert man die Paramter (mT, DT) so lange, bis die
Tilgerfrequenz fT „exakt“ gleich der Erregerfrequenz fS ist. Als „Sensor“ für die Messung xT würde sich z.B.
eine Reflexlichtschranke oder auch ein dicht vor die Tilgerfeder gehaltenes Mikrofon eignen (Denn
bekanntlich misst das Mikrofon in diesem Fall die Beschleunigung der vor dem Mikrofon sich bewegenden
„Fläche“).
----------------------- D:\SI040306\KUELLMAR\2MAS9.TXT ------1¦ F = As*sin(2*pi*fS*t) + Ad*drei(fD*t) + Ap*ja(t-t1)*ja(t2-t)
2¦ x = x+v*dt
3¦ xT = xT+vT*dt
4¦ v = v+(F-D*x-r*v+DT*(xT-x)+rT*(vT-v))*dt/m
5¦ vT = vT+(DT*(x-xT)+rT*(v-vT))*dt/mT
6¦ fT = 1/(2*pi * sqrt( mT/DT) ) { fT= Eigenfrequenz des Tilgers }
7¦ t = t+dt
Prof. Dr. R. Kessler, HS-Karlsruhe, C:\ro\Si05\kuellmar\Tilgerkunde_2n.doc, S. 4/5
Bild 5: Erregerfrequenz fS mit der „theoretischen“ Tilgerfrequenz fT., s. Text im Bild
Wenn die Masse m reibungslos ist (r=0), dann scheint der Tilger (trotz richtigem
Abgleich) NICHT mehr richtig zu funktionieren!
Bild 6: Keinerlei Reibung ( r=0, rT=0), Sinuskraft mit der „richtigen“ Tilgerfrequenz fT. Es ist enttäuschen,
dass trotzdem die Masse m beachtlich Amplitude hat. Wieso funktioniert im reibungslosen Fall der Tilgereffekt
nicht mehr?? S. Text im Bild.
Berechnung der richtigen Startgeschwindigkeit vT des Tilgers (für den Fall r= 0 ).
Die DGL für m ist m*v’ = F –D*x - r*v + DT*(xT-x) + rT*(vT-v).
Spezialfall: r=0 und auch rT=0. Ziel: x=0. Welche Forderung an Tilger?
Für r=0 und rT=0 und x=0 (und folglich v’= 0 und v= 0 ) wird die DGL
0 = F – 0 - 0 + DT*xT , also mit F= As*sin( 2*pi*fS*t) wird die Tilgerauslenkung xT
xT = -F/DT = -As/DT * sin( 2*pi*fS*t).
Folglich hat der Tilger die Geschwindigkeit vT = dxT/dt = - 2*pi*fS* As/DT * cos( 2*pi*fS*t).
Prof. Dr. R. Kessler, HS-Karlsruhe, C:\ro\Si05\kuellmar\Tilgerkunde_2n.doc, S. 5/5
Für t=0 wird also die „Startgeschwindigkeit“ des Tilgers vT(0) = - 2*pi*fS * As/DT.
Nach der früheren Überlegung ist die Sinusfrequenz = Eigenfrequenz des Tilgers, also
fS=1/(2*pi*sqrt(mT/DT)). Dies fS eingesetzt ergibt für die Startgeschwindigkeit des Tilgers
vT(0) = - sqrt( DT/mT) * As / DT = - As/sqrt( DT*mT).
Ergebnis: Für Totaltilgung bei reibungsfreier Masse m (r=0) muss die
Startgeschwindigkeit des Tilgers sein vT(0) = - As/ sqrt( DT*mT)
Im nachfolgenden Tephysprogramm 2mas11.txt ist diese Formel hinzugefügt worden (Zeile 7).
---------------------- D:\SI040306\KUELLMAR\2MAS11.TXT ------1¦ F = As*sin(2*pi*fS*t)+Ad*drei(fD*t)+Ap*ja(t-t1)*ja(t2-t)
2¦ x = x+v*dt
3¦ xT = xT+vT*dt
4¦ v = v+(F-D*x-r*v+DT*(xT-x)+rT*(vT-v))*dt/m
5¦ vT = vT+(DT*(x-xT)+rT*(v-vT))*dt/mT
6¦ fT = sqrt(DT/mT)/(2*pi)
7¦ vT0 = -As/sqrt(mT*DT) { vT0= Startwert Geschwindigkeit des Tilgers }
8¦ t = t+dt
Beim nächsten Bild (Nr 5) wurde diese Startgeschwindigkeit vT0 eingesetzt. Das Ergebnis der Simulation ist
wie erwartet: Die Auslenkung x der Masse ist von Anfang an x = Null, obwohl doch die Kraft F auf die Masse
einwirkt. In der „Praxis“ wird man diese Art der Tilgereinstellung wohl NICHT erreichen können. Drum
muss die Masse m etwas gedämpft sein (also r ungleich 0).
Bild 6: Startwerte richtig gewählt S. Text im Bild.