Kapitel 12. Differenzen- und Differenzialgleichungen 12.1
Werbung

Kapitel 12. Differenzen- und
Differenzialgleichungen
In diesem Kapitel wollen wir die grundlegenden
Techniken erklären, mit denen das dynamische Verhalten
von ökonomischen Systemen (und nicht nur solchen)
untersucht werden kann. Dabei tritt ganz oft ein
Parameter t auf, der meistens als “Zeit” interpretiert
werden kann. Wir werden sowohl zeitkontinuierliche
Systeme als auch zeitdiskrete Systeme kennenlernen.
Wir beginnen mit dem diskreten Fall.
12.1 Differenzengleichungen
Eine Gleichung der Form
xt = a xt−1 + b
heißt Differenzengleichung erster Ordnung mit
konstanten Koeffizienten. Dabei bezeichnet x0
den Startwert; a und b sind (reelle oder komplexe)
Konstanten.
Mathematik II – SoSe 2004
122
Wenn man bei einer solchen Differenzengleichung x0
kennt, so kann man x1, x2, . . . ausrechnen.
Aus
naheliegenden Gründen werden Differenzengleichungen
oft auch Rekursionsgleichungen genannt.
Beispiel 1
xt = 2xt−1 − 1, x0 = 3
Wir erhalten
x1 = 2 · 3 − 1 = 5
x2 = 2 · 5 − 1 = 9
x3 = 2 · 9 − 1 = 17
x4 = 2 · 17 − 1 = 33 usw.
Das Problem ist hier, dass wir zwar prinzipiell xt
berechnen können (wenn wir nur geduldig genug sind),
es aber zunächst keine “geschlossene” Formel für xt
gibt, also keine Formel, die abhängig von t, a, b und x0
den Wert xt berechnet, ohne vorher xt−1, xt−2 , . . . , x1
berechnet zu haben.
Eine solche Formel (wenn es sie denn gibt) nennen wir
Lösung der Differenzengleichung. Es ist in der Tat
möglich, solche Formeln anzugeben:
Mathematik II – SoSe 2004
123
Gilt xt = a xt−1 + b,
xt =
a t · x0 −
t = 1, 2, . . ., so ist
b
1−a
x +t·b
0
b
+
1−a
falls a 6= 1
falls a = 1
Beispiel 2 (1)
Wir
betrachten
noch
einmal
xt = 2xt−1 − 1, x0 = 3 . Die oben angegebene Formel
liefert
xt = 2 t 3 −
−1
1−2
= 2t+1 + 1
+
−1
1−2
Das stimmt mit den berechneten Werten überein.
(2) xt = −3xt−1 + 4, x0 = 0
Mathematik II – SoSe 2004
Die ersten Folgenglieder
124
sind
x0 = 0
x1 = 4
x2 = −8
x3 = 28
x4 = −80 usw.
Die “geschlossene”, explizite Formel ist
xt = (−3)
t
4
−
4
4
+ = −(−3)t + 1.
4
Stationäre Punkte
Wir betrachten xt = axt−1 + b. Ein Punkt x∗ heißt
stationär, wenn
x∗ = a x ∗ + b
gilt, wenn die Differenzengleichung also konstante Werte
(nämlich den Wert x∗) liefert. Stationärer Punkt ist
b
.
x =
1−a
∗
Mathematik II – SoSe 2004
125
Damit kann man die Lösung
b
b
t
xt = a · x0 −
+
1−a
1−a
auch in der Form
xt = at(x0 − x∗) + x∗
schreiben. Die Differenzengleichung kann auch als
xt = a(xt−1 − x∗) + x∗
geschrieben werden. Ist |a| < 1, so gilt
lim xt = x∗,
t→∞
d.h. die Folge (xt) kommt dem stationären Punkt immer
näher. In diesem Fall heißt die Differenzengleichung
stabil.
Beispiel 3
x0 = 3,
1
1
xt = xt−1 + , x0 = 3 Es gilt
2
2
x1 = 2,
3
x2 = ,
2
5
x3 = ,
4
9
x4 =
8
und so weiter. Wir haben x∗ = 1 und limt→∞ xt = 1.
Mathematik II – SoSe 2004
126
Beispiel 4 (“Schweinezyklus”) Die Kosten, um q
Schweine zur Schlachtreife zur führen, seien
C(q) = α q + β q 2.
Wir nehmen an, es gibt N Schweinezuchtbetriebe. Die
Nachfrage D nach Schweinen hänge vom Preis der
Schweine ab und sei
D(p) = γ − δ p.
Ferner versucht jeder Schweinezuchtbetrieb seinen Profit
π(q) = p · q · C(q) = p · q − α · q − β · q 2
zu optimieren. Wie überlegen uns zunächst, wie groß q
gewählt wird, um π(q) zu maximieren. Dazu bestimmen
wir
π 0(q) = p − α − 2 β q
und erhalten
p−α
π (q) = 0 genau für q =
.
2β
0
Das ist offensichtlich ein Maximum wenn β > 0 ist,
denn dann ist π 00(q) = −2 β < 0.
Mathematik II – SoSe 2004
127
Also produziert jeder Betrieb
gibt es also ein Angebot von
Np − Nα
2β
p−α
2β
Schweine, insgesamt
Schweinen.
Die Nachfrage nach Schweinen ist γ − δp. Wir haben
also einen stabilen Zustand, wenn
Np − Nα
= γ − δp
2β
gilt, also bei einem Preis
p
∗
2γβ + N α
.
=
N + 2βδ
In der Regel besteht aber ein Unterschied zwischen
p und p∗. Das bedeutet, dass sich aufgrund der
Angebotssituation auf dem Markt ein Preis bildet, der
von dem Preis verschieden ist, für den die Zuchtbetriebe
ihre Produktion kalkuliert haben. Wir versuchen nun zu
klären, wie sich das System möglicherweise entwickelt.
Qualitativ wird es so sein, dass die Betriebe den am
Markt erzielten Preis (nennen wir ihn p0) als Grundlage
ihrer neuen Kalkulation in der nächsten Zuchtperiode
(im nächsten Jahr) wählen.
Aber auch so wird
Mathematik II – SoSe 2004
128
vermutlich kein stabiler Zustand erreicht werden. Es
wird wieder so sein, dass der am Markt ermittelte Preis
(aus Angebot und Nachfrage) von p0 verschieden ist.
Man kann sich aber vorstellen, dass die Unterschiede
zwischen dem Preis im Jahr t und dem im Jahr t + 1
immer kleiner werden. Das wollen wir nun mathematisch
fundieren.
Dazu nehmen wir an, der Preis zum Zeitpunkt t sei
pt. Dieser Preis ist die Kalkulationsgrundlage für die
nächste Zeitperiode. Das heißt, die Zuchtbetriebe gehen
davon aus, den Preis pt zum Zeitpunkt t + 1 zu erzielen
und produzieren entsprechend zusammen ein Angebot
von
N (pt − α)
Schweinen
2β
Dieses Angebot soll auf dem Markt zum Zeitpunkt t + 1
nun verkauft werden. Die Gleichheit von Angebot und
Nachfrage wird durch den Preis aufgrund der Formel
γ − δpt+1 =
N (pt − α)
2β
ermittelt, also
pt+1 =
Mathematik II – SoSe 2004
−N
αN + 2βγ
pt +
,
2βδ
2βδ
129
eine lineare Differenzengleichung mit der Lösung
pt = (−a)t(p0 − p∗) + p∗,
wobei
a =
p∗ =
N
2βδ
2γβ + αN
N + 2βδ
Das ist genau der schon oben ermittelte Preis für einen
stabilen Zustand. Ist |a| < 1, so pendelt der Preis um
p∗ herum, mal ist er größer, mal kleiner als p∗ (weil
a > 0, denn die Parameter β und δ sind nur sinnvoll,
wenn sie > 0 sind). Der Preis nähert sich p∗ aber immer
mehr an.
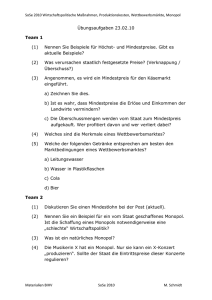
Wir können dies in folgendem Bild veranschaulichen:
Auf der y-Achse wird das Angebot aufgetragen, auf
der x-Achse der Preis. Beginnen wir mit einem Preis
0 −α)
p0, so ist das zugehörige Angebot S0 = N (p2β
.
Zu diesem Angebot berechnet sich der neue Preis p1
durch γ − δp1 = S0. Der neue Preis p1 veranlasst
1 −α)
die Zuchtbetriebe, S1 = N (p2β
Schweine aufzuziehen.
Am Markt wird aus diesem Angebot ein Preis p2 durch
γ − δp2 = S1 ermittelt, usw.
Mathematik II – SoSe 2004
130
Angebot
Angebot abhängig vom erwarteten Preis
S1
S0
Preis abhängig vom tatsächlichen Angebot
Preis
p2
p0
p∗
p1
Wir haben in das Bild die beiden Geraden
S=
N (p − α)
2β
und
S = γ − δp
eingezeichnet. Der Schnitt dieser beiden Geraden ist
Mathematik II – SoSe 2004
131
genau der stationäre Punkt p∗ mit dem zugehörigen
Angebot γ − δp∗.
Beispiel 5 (Finanzmathematik) Die Formeln, die wir
in dem Kapitel über Finanzmathematik kennengelernt
haben, sind im wesentlichen Lösungen linearer
Differenzengleichungen 1.
Ordnung.
Wir wollen
das an einem Beispiel illustrieren: Angenommen, eine
Familie nimmt einen Kredit in Höhe von 100 000 ¤ auf.
Zinsen in Höhe von 0.5% werden am Anfang eines jeden
Monats fällig. Die Familie zahlt am Ende eines jeden
Monats 550 ¤ an die Bank zur Schuldentilgung. Wir
erhalten die Differenzengleichung
Kt+1 = 1.005 Kt − 550,
K0 = 100000,
wobei Kt die Schulden am Ende des Monats t angibt.
Wir erhalten
550
550
t
Kt = 1.005 · K0 −
+
0.005
0.005
t
1.005 − 1
= 1.005t · K0 − 550 ·
.
0.005
Das ist genau der Ausdruck, den Sie auch erhalten, wenn
Sie die Formel auf Seite 258 anwenden mit d = 0.005
und A = 550.
Mathematik II – SoSe 2004
132
Variable Koeffizienten
Eine Differenzengleichung
xt = at xt−1 + bt,
t = 1, 2, . . .
heißt lineare Differenzengleichung 1. Ordnung mit
variablen Koeffizienten
Eine solche Gleichung tritt beispielsweise auf, wenn
der Zinssatz im obigen Beispiel nicht konstant ist
oder auch die Tilgung variabel ist. Man kann sich
hoffentlich vorstellen, dass es für solche Gleichungen
keine so schönen Formeln gibt wie für Gleichungen mit
konstanten Koeffizienten. Es gilt
xt =
t
Y
s=1
!
a s x0 +
t
X
k=1
t
Y
s=k+1
as b k .
(15)
Beispiel 6 Sie wollen unter zwei Möglichkeiten der
Geldanlage auswählen: Sie können in den nächsten
drei Jahren jährlich 5000 ¤ anlegen. Sie erhalten
das Angebot, das Geld mit jährlich 5% zu verzinsen.
Alternativ bietet man Ihnen an, das Geld im ersten Jahr
mit 4%, im zweiten Jahr mit 7% und im dritten Jahr
Mathematik II – SoSe 2004
133
mit 4% zu verzinsen. Welches Angebot ist besser? Im
ersten Fall haben wir die Differenzengleichung
xt = 1.05(xt−1 + 5000) = 1.05 · xt−1 + 5250,
x0 = 0, t = 1, 2, 3.
Im zweiten Fall haben wir
xt = at(xt−1 + 5000), x0 = 0,
a1 = 1.04, a2 = 1.07, a3 = 1.04, t = 1, 2, 3.
Wir können x1, x2, x3 natürlich in beiden Fällen direkt
ausrechnen:
x0
x1
x2
x3
Fall 1
Fall 2
0
0
5250
5200
10762.50
10914
16456.125 16550.56
Eingesetzt in Formel (15) erhalten wir im Fall 1
1.052 · 5250 + 1.05 · 5250 + 5250
im Fall 2
1.04 · 1.07 · 5200
| {z } +1.04 · 5350
| {z } + 5200
| {z }
=b1
Mathematik II – SoSe 2004
=b2
=b3
134
Achtung: Das zweite Angebot ist nur deshalb besser,
weil jährlich Geld angelegt wird. Würden Sie einen
Betrag von z.B. K0 = 15000 für drei Jahre anlegen, so
haben Sie bei der ersten Anlageform nach drei Jahren
1.053 · K0 = 1.157625 · K0,
im zweiten Fall
1.04 · 1.07 · 1.04 · K0 = 1.157312 · K0,
also (etwas) weniger als im Fall 1.
Differenzengleichungen 2. Ordnung
Differenzengleichungen drücken die Dynamik eines
Systems aus.
Das ist hoffentlich bis hierher klar
geworden und soll noch einmal vertieft werden.
Beispiel 7 Mit Yt bezeichnen wir die gesamten
Ausgaben, die in einer Volkswirtschaft zum Zeitpunkt
t getätigt werden. Diese setzen sich aus konsumptiven
Ct und investiven It Ausgaben zusammen. Wir nehmen
an, der Zusammenhang zwischen diesen Größen sei wie
folgt gegeben:
Mathematik II – SoSe 2004
135
Y t = Ct + It
(klar!)
Ct+1 = a · Yt + b
It+1 = c · (Ct+1 − Ct).
Wir erhalten
Yt+1 = Ct+1 + It+1
= a · Yt + b + c · (Ct+1 − Ct)
= a · Yt + b + c · a · Yt + c · b − c · a · Yt−1 − c · b
= a · (1 + c) · Yt − a · c · Yt−1 + b
oder, anders geschrieben,
Yt+2 = a · (1 + c) · Yt+1 − a · c · Yt + b,
t = 2, 3, . . .
Um Yt zu berechnen, müssen wir in diesem
Fall Informationen über die Ausgaben in den zwei
vorhergehenden Zeitperioden haben!
So etwas nennt man eine Differenzengleichung 2.
Ordnung:
Mathematik II – SoSe 2004
136
Eine Gleichung der Form xt+2 = f (t, xt, xt+1) heißt
Differenzengleichung 2. Ordnung. Gilt dabei
xt+2 + at xt+1 + bt xt = ct,
so heißt die Differenzengleichung linear. Sind die
at, bt, ct nicht von t abhängig, so sprechen wir von
einer linearen Differenzengleichung mit konstanten
Koeffizienten.
Es sollte klar sein, dass man diese Begriffe leicht
auf Differenzengleichungen noch höherer Ordnung
verallgemeinern kann.
In unserem Beispiel 7 haben wir eine lineare
Differenzengleichung mit konstanten Koeffizienten.
Wir wollen hier einige Bemerkungen zur Lösung linearer
Differenzengleichungen machen.
Die Gleichung
xt+2 + at xt+1 + bt xt = 0
heißt homogen.
Man kann zeigen, dass es zwei
(1)
(2)
Basislösungen ut und ut gibt, die linear unabhängig
Mathematik II – SoSe 2004
137
sind. Dabei nennen wir zwei Folgen (ut) und (vt) linear
unabhängig, wenn aus
λut + µvt = 0 für alle t
folgt λ = µ = 0. Wir können dann jede Lösung xt des
homogenen Systems schreiben als
(1)
(2)
xt = A u t + B u t
mit geeignet gewählten Zahlen A und B. Ist u∗t eine
spezielle Lösung des inhomogenen Systems
xt+2 + at xt+1 + bt xt = ct
so lässt sich jede Lösung xt des inhomogenen Systems
in der Form
(1)
(2)
xt = A ut + B ut + u∗t
schreiben.
Es gibt ein einfaches Verfahren, wie man die
Lösung linearer Differenzengleichungen mit konstanten
Koeffizienten bestimmen kann. Wir beschränken uns
hier auf den Fall 2. Ordnung.
Mathematik II – SoSe 2004
138
Die allgemeine Lösung einer Differenzengleichung
xt+2 + a xt+1 + b xt = 0
ist
xt = A α1t + B α2t
wobei α1 und α2 zwei verschiedene Lösungen von
x2 + ax + b = 0
(16)
sind. Gibt es nur eine Nullstelle α von x2 + ax + b,
so ist die allgemeine Lösung
xt = A α t + B t α t .
Die Gleichung (16) heißt charakteristische Gleichung
der Differenzengleichung.
Beispiel 8 (1)
xt+2 − 6xt+1 + 8xt = 0
Die
charakteristische Gleichung ist
x2 − 6x + 8 = 0
mit den Nullstellen 2 und 4. Die allgemeine Lösung ist
Mathematik II – SoSe 2004
139