DemoFunktionPL - home.hs
Werbung

Prof. Dr. R. Kessler, FH-Karlsruhe, Sensorsystemtechnik, PLL_H4.doc, S. 1/ 2
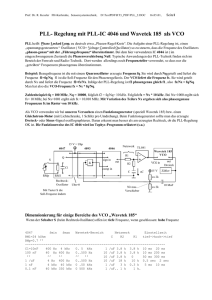
PLL-IC 4046,zusätzlich Netzwerk
aus R1 +R2 + Kondensator C, Strom iPLL, Spannung uC
PLL-Prinzip Datei PLL_H4.mdl
R. Kessler, Nov. 2005
Q1
Simulation Parameters; stop time=12; fixed step=0.01; ode5
Tephys: iPLL=nein(Q1*Q2)*(Q1*(15 - uC)+Q2*( 0 - uC))/(R1+R2)
uC=uC+iPLL*dt/C
Out1
iPLL
!(u[1]*u[2])* ( u[1]*(15-u[3]) +u[2]*(0-u[3]) )/(10+20)
Out2
uC
1/1
1/s
iPLL
IC4046
!(u[1*u[2])* ( u[1]*(15-u[3]) +u[2]*(0-u[3]) )/(R1+R2)
1/C
Q2
Aufruf: rPLL_H4
Wort-Definition der Wirkung der FlipFlops im IC 4046:
Q1 wird von 0 auf 1 gesetzt von der Aufflanke von u1,
Q2 wird von 0 auf 1 gesetzt von der Aufflanke von u2,
Beide werden auf 0 zurückgesetzt, wenn Q1 und Q2 high (=1) sind.
Subsystem
IC 4046
Simulation Parameters; stop time=12; fixed step=0.01; ode5
t
To Workspace
u1
sin(2*pi*1*u-1.5) > 0
Clock
Wort-Definition der AufFlanke S1:
Wenn u1 > als alter Wert von u1,
dann S1=1, sonst S1=0
S1
>
Fcn
Memory
u2
sin(2*pi*(0.5+(1.5-0.2)/2* u/10 )*u-0.5) > 0
S2
>
u[1] + !u[1]*u[3] - u[2]*u[3]
1
Out1
u[1] + !u[1]*u[3] - u[2]*u[3]
2
Out2
6
Q2/2
Q1/2
4
S2/2
S1/2
2
u2/2
u1/2
0
uC
iPLL
-2
0
2
4
6
8
10
12
Prof. Dr. R. Kessler, FH-Karlsruhe, Sensorsystemtechnik, PLL_H4.doc, S. 2/ 2
% Datei rPLL_H4.m
clear; PLL_H4; % Aufruf des Modells auf Bildschirm
% disp('weiter: Taste');pause;
sim('PLL_H4'); figure(2);clf;
plot(t,u1/2,t,u2/2+1,t,S1/2+2,t,S2/2+3,t,Q1/2+4,t,Q2/2+5,'k');
hold on;
set(0,'defaultlinelinewidth',1.5); % d icker zeichnen
plot(t,uC-1, t, iPLL-2); % dies wird dicker gezeichnet,
grid on;
axis([0,max(t)+1,-2.2,6]);
set(0,'defaultlinelinewidth',1.0); % wieder normal zeichnen
hold off; % damit nachfolgende Figuren keinen Quatsch machen
V=0.2;
text(max(t),0+V, ' u1/2'
);
text(max(t),1+V, ' u2/2'
);
text(max(t),2+V, ' S1/2'
);
text(max(t),3+V, ' S2/2'
);
text(max(t),4+V, ' Q1/2'
);
text(max(t),5+V, ' Q2/2'
);
text(max(t),0+V, ' u1/2'
);
text(max(t),-1+V, ' uC'
);
text(max(t),-2+V, ' iPLL'
);